MEKANIKA
JURUSAN FISIKA
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS ISLAM NEGERI MAULANA MALIK IBRAHIM MALANG
1
OSILASI HARMONIK PADA PEGAS SPIRAL
(Pegas dirangkai seri dan parallel)
Tujuan :
a. Menentukan konstanta pegas D pada berbagai pegas
b. Menentukan konstanta pegas yang terhubung secara parallel
c. Menentukan konstanta pegas yang terhubung secara seri
Dasar Teori
Gerak osilasi merupakan gerak yang sangat penting diketahui karena berhubungan
dengan getaran, baik pada mesin, bumi maupun molekul dan atom-atom di dalam
bahan.
Apabila suatu partikel bergerak sepanjang sumbu-x, maka partikel itu dikatakan
bergerak selaras sederhana jika perpindahannya relative terhadap titik awal,
sebagai fungsi waktu diberikan oleh persamaan :
A t
x sin
Besaran
t
disebut fase getaran, dimana θ adalah fase awalnay, yaitu fasepada t = 0. Besaran A adalah amplitude getaran, sedang ω adalah frekuensi
anguler getaran, yaitu bahwa 2f , dengan f adalah frekuensi getaran. Kecepatan partikel yang bergetar selaras diberikan oleh persamaan :
Sedang percepatannya diberikan oleh :
Yang berarti bahwa percepatan pada gerak selaras sederhana adalah sebanding
dan berlawanan arah dengan (vector) perpindahannya.
Gaya pada gerak selaras sederhana dari partikel yang bermassa m yang
mengalami percepatan a adalah :
a m
F
2 x
m a m
F 2
Atau F kx
Bentuk persamaan F kx, yang misalnya berlaku pada pegas, dikenal sebagai Hukum Hooke. Persamaan untuk gaya di atas juga memperlihatkan bagaimana
dalam gerak selaras sederhana, gaya penyebab gerak sebanding tetapi berlawanan
arah dengan (vector) perpindahan yang dialami oleh partikel. Gaya penyebab
gerak selaras sederhana selalui menuju pusat (titik setimbang), sehingga dapat
dianggap sebagai gaya tarik yang berpusat di titik setimbang tersebut. Besaran k
di atas disebut konstanta elastic (atau kasus pada pegas, konstanta pegas).
Alat dan Bahan :
1. Cobra 3 Basic unit
2. Power supply, 12 V
3. Kabel RS232
4. Cobra 3 translation
5. Light barrier
6. Benang sutra, l = 200 m
7. Penyangga berat, 10 gr
8. Pemberat 10 gr
9. Pemberat 50 gr
10.Tripod PASS
11.Support rod PASS, l = 1000 mm
12.Stand tube
13.Rod with hook
14.Right angle clamp PASS
15.Pegas, d = 3 N/m
16.Pegas, d = 20 N/m
17.Kabel penghubung, l = 100 cm, merah
18.Kabel penghubung, l = 100 cm, biru
19.Kabel penghubung, l = 100 cm, kuning
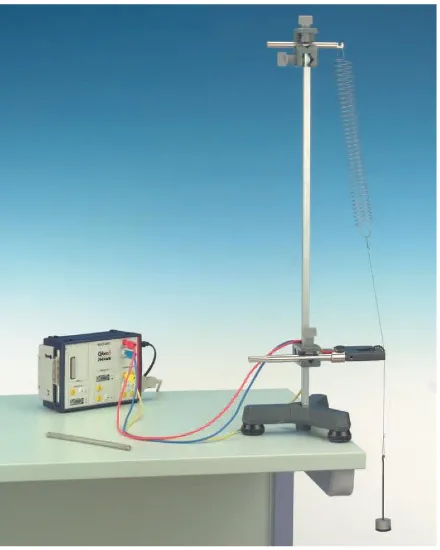
3 Gambar 1. Rangkaian alat percobaan
Langkah Percobaan :
1. Sesuai gambar 1, ukur konstanta pegas dari pegas secara individu
2. Sambungkan listrik dari compact light barrier dengan Cobra 3 basic unit
seperti pada gambar 2
3. Letakkan bengan sutra pada katrol yang terhubung dengan light barrier.
Alat diatur sedemikian rupa sehingga katrol berada ditengah-tengah
benang sutra dengan penyangga berat (diberi tambahan beban jika
diperlukan) yang bergerak bebas
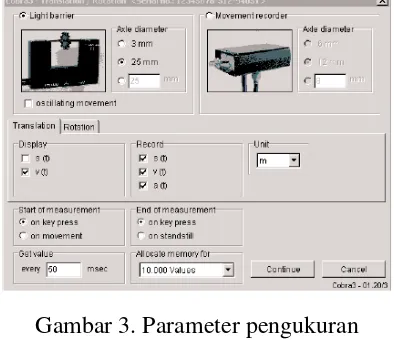
4. Atur parameter yang akan diukur seperti gambar 3
5. Tarik penyangga beban beberapa cm kebawah, lepaskan dan mulai rekam
pengukuran dengan meng-klik icon ‘start measurement’
6. Setelah kira-kira 10 sampai 15 sekon klik icon ‘stop measurement’
7. Gambar 4 menunjukkan tipe hasil pengukuran. Jika nilai pada kotak dialog ‘get value every (50) ms terlalu tinggi atau terlalu rendah, gangguan atau ketidakseragaman pengukuran dapat terjadi, sehingga digunakan rata-rata
4 8. Atur setiap osilasi pegas dengan masa yang berbeda dan hitung periode
dan konstanta pegas
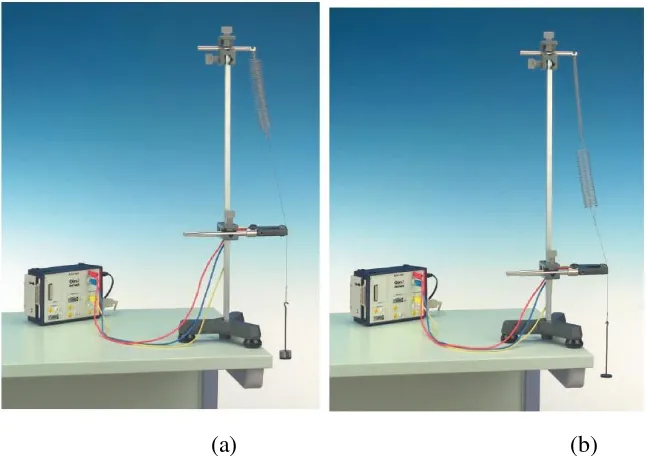
9. Gambar 5 menunjukkan set up pengukuran konstanta pegas yang
dihubungkan secara parallel dan seri
Gambar 2. Koneksi pada tipe fork light barrier dengan Cobra3
Gambar 3. Parameter pengukuran
5
(a) (b)
Gambar 5. Rangkaian alat percobaan (a). pegas dirangkai parallel;
(b) pegas dirangkai seri
Evaluasi
Jika pegas disimpangkan dari posisi awal, gaya pada simpangan ini adalah :
x D
F
D adalah konstanta pegas. Jika terjadi osilasi, periodenya adalah :
D m T 2
Untuk masa yang berbeda, konstanta pegas memiliki nilai konstan.
Pegas yang lebih lemah diberi beban yang masanya lebih kecil untuk
menghindari overstreching. Meskipun demikian, dapat dilihat bahwa nilai
konstanta pegas D sedikit meningkat dengan ditambahkannya masa. Sehingga persamaan
D m T 2
Hanya berlaku untuk defleksi kecil. Untuk defleksi lebih besar hukum linier Hook’s menjadi tidak valid.
6
Konstanta pegas total D adalah jumlah dari konstanta pegas D1 dan D2
Jika pegas disusun secara seri, maka
7
GAYA SENTRIFUGAL
Tujuan :
Menghitung gaya sentrifugal sebagai fungsi :
a. Massa
b. Kecepatan sudut
c. Jarak dari sumbu rotasi ke pusat gravitasi mobil
Dasar Teori :
Suatu benda yang bergerak dengan kecepatan teratur baik dengan kecepatan yang
berubah-ubah maupun dengan kecepatan konstan, maka benda tersebut akan
mempunyai bentuk lintasan tertentu, baik lintasan yang teratur bentuknya maupun
lintasan yang acak atau random. Salah satu bentuk lintasan yang teratur adalah
lintasan dengan bentuk lengkung. Suatu benda yang bergerak dengan lintasan
lengkung maka vector kecepatannya akan mengalami perubahan kecepatan yang
dipengaruhi oleh factor-faktor tertentu.
Perubahan vector kecepatan ini disebut dengan percepatan a, yang dapat dirumuskan :
t melingkar dari titik A ke titik B adalah :
n
vt= komponen kecepatan tangensial
8 Dari persamaan di atas dapat disimpulkan bahwa besarnya perubahan kecepatan
(∆v) dipengaruhi oleh dua komponen yaitu komponen kecepatan tangensial (vt)
dan komponen kecepatan normal atau radial (vn). Jika sebuah benda diikatkan
pada tali yang panjangnya R dan berputar dalam lingkaran vertical terhadap
sebuah titik tertentu, misalnya O, dimana ujung yang lain dari tali tersebut
diikatkan. Geraknya berputar tidak uniform karena lajunya bertambah besar ketika
gerakannya menurun dan lajunya berkurang jika gerakannya menuju ke atas.
Gaya yang bekerja pada benda tersebut disetiap posisi adalah gaya berat W dan tegangan tali T. besarnya gaya berat adalah :
g m W .
Gaya berat yang berpengaruh pada benda dapat diuraikan menjadi komponen
normal dan komponen singgung yaitu :
Komponen normal : W cos m.gcos
Komponen singgung : W sin m.gsin Resultan gaya singgungnya adalah :
sin
w Ft
Resultan gaya normalnya adalah :
cos
w T Fr
Sehingga percepatan garis singgungnya menurut Hukum Newton II adalah :
dengan persamaan :
9
f = frekuensi (Hz)
T = periode (detik)
Jika massa digerakkan dengan kelajuan konstan (v) sehingga lintasannya melingkar maka massa akan mengalami gaya sentrifugal :
R v m Fr
2
.
Alat dan Bahan :
1. Peralatan gaya sentrifugal
2. Mobil
3. Holding pin
4. Laboratory motor, 220 V AC
5. Gearing 30/1
6. Bearing unit
7. Driving belt
8. Support rod w hole, 100 mm
9. Barrel base
10.Power supply 5 V DC/2.4 A
11.Spring balance holder
12.Support rod PASS,square, l = 250 mm
13.Bosshead
14.Bench clamp PASS
15.Fish line, l = 100 m
16.Neraca pegas, transparan, 2 N
17.Pemberat, 10 gr
18.Pemberat, 50 gr
10 Gambar 1. Rangakaian alat percobaan
Langkah Percobaan ;
1. Susun percobaan seperti gambar 1
2. Pointer merah dipasang pada pusat batang. Ini menunjukkan jarak (sumbu
rotasi pada pusat gravitasi mobil)
3. Pada bagian terluar dari peralatan gaya sentrifugal, penutup dilekatkan
pada batang pemandu dan disiapkan untuk memicu start-stop light barrier
4. Ketika pengukuran waktu putaran penuh ganti ke mode ‘ ‘
5. Yakinkan bahwa mobil tidak menyentuh light barrier pada radius
maksimum
6. Dengan meningkatkan kecepatan sudut, radius meningkat, sehingga terjadi
perubahan pengukuran gaya. Ini seharusnya dikompensasi dengan naik
dan turunnya neraca pegas
Penentuan gaya sentrifugal sebagai fungsi massa
7. Mobil eksperimen secara bertahap diberi tambahan beban
8. Peralatan gaya sentrifugal dengan kecepatan sudut konstan diputar dengan
11 9. Gaya yang terjadi Fz ditentukan dengan bantuan neraca pegas
10.Mobil dihubungkan kebawah roda katrol ke neraca pegas dengan benang
(panjang sekitar 26 cm) dan memasang kaitan
11.Neraca pegas diturunkan pada posisi paling maksimum. Kemudian motor
diatur dengan kecepatan sudut konstan selama jalannya percobaan.
12.Percobaan gaya Fz didapatkan dengan mengukur mobil tanpa penambahan
beban.
13.Posisi r pada red pointer ditandai dengan selotip. Untuk pengukuran ini, motor dihentikan dengan mematikan power supply
14.Beban ditambahkan dan diletakkan di mobil pengukuran dan dilakukan
percobaan seperti diatas dengan masa beban yang berbeda-beda
15.Masing-masing gaya Fz dibaca pada neraca pegas dan dicatat hasil
perubahannya.
Penentuan gaya sentrifugal sebagai fungsi kecepatan sudut
16.Pada percobaan ini, masa mobil eksperimen tetap konstan
17.Tandai radius dengan selotip
18.Pada kecepatan sudut berbeda dengan pemindahan neraca pegas seperti
pada bagian 1, pengukuran mobil dibawa pada posisi r. 19.Tekan mobil dari dalam ke luar. Gaya Fz dapat dibaca.
20.Kecepatan sudut ω dihitung dari waktu rotasi T T
2
Penentuan gaya sentrifugal sebagai fungsi jarak pusat sumbu rotasi dan masa
mobil pengukur
21.Masa mobil percobaan dalam keadaan konstan
22.Kecepatan sudut diatur ke motor
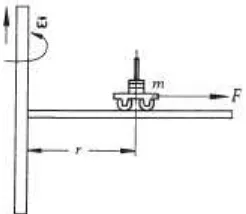
12 Gambar 2. Massa m pada waktu system berotasi
Evaluasi
Medan gaya luar U (medan grafitasi), diganti dengan lintasan, kecepatan sudut ω konstan dan mobil diam dalam rotasi system (U = 0; v = konstan = 0; ω = konstan)
Dari persamaan 1, hanya gaya sentrifugal dan gaya pengganti F, yang dibaca
pada neraca pegas :
13 Gambar 4. Gaya sentrifugal sebagai fungsi kecepatan sudut ω
Gambar 5. Gaya sentrifugal sebagai fungsi jarak
Dari regresi linier pada nilai pengukuran gambar 4, dengan persamaan
eksponensial
0
.X Y
A
Y B
Eksponen didapatkan B2.053
Konstanta pegas digunakan untuk mengukur gaya sentrifugal dengan mengikuti Hukum Hooke’s
r k FD .
14 Jika gaya sentrifugal juga linear dengan r, maka :
r m F 2
Perbedaan harus dibuat dengan menggunakan 3 kasus :
15
MOMEN DAN MOMENTUM SUDUT
Tujuan :
Dengan menggunakan percepatan gerak melingkar yang sama, tentukan :
a. Sudut dari rotasi sebagai fungsi waktu
b. Kecepatan sudut sebagai fungsi waktu
c. Percepatan sudut sebagai funsi waktu
d. Percepatan sudut sebagai fungsi lengan tuas
Dasar Teori
Sebuah benda berotasi terhadap sebuah titik yang tetap (sumbu putar) berarti
setiap titik pada benda tersebut akan melakukan gerak melingkar dengan pusat
lingkarannya berada pada sumbu putar. Analog antara besaran-besaran rotasi dan
translasi yaitu :
a. Besaran sudut putar θ analog dengan pergeseran x b. Kecepatan angular ω analog dengan kecepatan v
c. Percepatan angular α analog dengan percepatan a
Hubungan antara momentum sudut dan kecepatan sudut partikel dan benda tegar
yang berotasi mengelilingi sumbu tetap dalam kerangka acuan inersial, untuk
sebuah partikel tunggal bermassa m yang bergerak pada lingkaran laju v
mengelilingi sumbu z dari kerangka acuan inersial. Kecepatan sudutnya ω berarah ke atas sepanjang sumbu z. Momentum sudutnya I terhadap titik asal angka acuan O. Torsi tersebut ada karena jika partikel bergerak melingkar harus ada gaya
sentripetal F atau gaya tersebut diberikan oleh tegangan tali ringan yang dikaitkan
dari partikel yang berputar pada sumbu z.
Torsi terhadap O ditimbulkan oleh gaya F diberikan oleh persamaan :
F x r
Torsi ini menyinggung lingkaran (tegak lurus bidang yang dibentuk oleh r dan F). Hubungan antara I dengan ω yaitu :
16
dengan nol, yaitu L tidak berubah. Sehingga hokum kekekalan momentum sudut
untuk benda yang berotasi yaitu : momentum sudut total pada benda yang berotasi
tetap konstan jika torsi total yang bekerja padanya sama dengan nol.
Alat dan Bahan :
1. Piringan putar dengan skala sudut
2. Piringan bercelah untuk meja putar
3. Perangkat holding dengan kabel rilis
4. Air bearing
5. Katrol presisi
6. Tabung tekanan udara, l = 1.5 m
7. Blower
8. Light barrier dengan counter
9. Power supply 5V DC/2.4 A
10.Kapasitor PEK 100 nF/250 V
11.Adapter, BNC-plug/soket 4 mm
12.Pemberat 1 g
13.Tempat pemberat 1 g
14.Benang sutra, l = 200 m
15.Kabel penghubung, l = 1000 mm, biru
16.Kabel penghubung, l = 1000 mm, merah
17.Pengukur putaran
18.Tripod base – PASS
19.Barel base – PASS
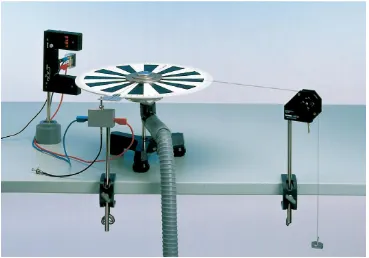
17 Gambar 1. Rangkaian alat percobaan
Langkah Percobaan
1. Alat dan bahan disusun seperti gambar 1
2. Alat dan bahan diarahkan dalam kondisi normal
3. Blower dihidupkan dan penahan putaran diluruskan secara horizontal
dengan dua kaki penahan berada pada dasar tumpuan
4. Saklar rilis disesuaikan berada dalam kondisi alat menyentuh lengkungan
sector awal
5. Pemicu jarak dan penghidup listrik disesuaikan dengan sekrup knurled
6. Light barrier dipindahkan untuk menentukan rentang sudut tetapnya
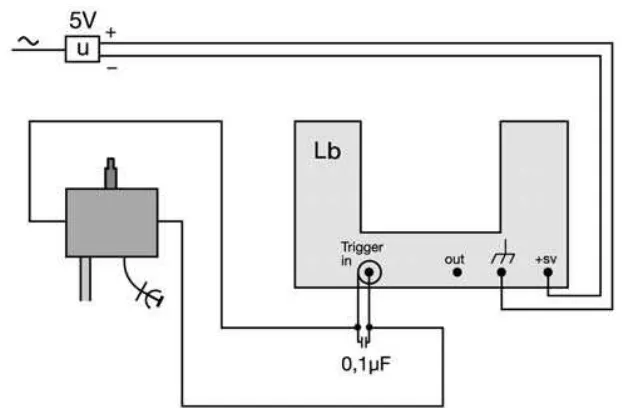
7. Tombol pengatur dan light barrier dihubungkan seperti gambar 2
8. Katrol presisi dijepitkan sehingga benang dapat didiamkan secara
horizontal di atas piringan dan ditempatkan pada pulley
Pengukuran sudut rotasi sebagai fungsi waktu
9. Tombol pilihan diletakkan pada posisi pada light barrier
10.Light barrier diatur pada sudut yang dikehendaki φ
11.Tombol kabel rilis ditekan dan dikunci pada tempatnya
18 13.Kawat penahan dilepaskan, pergerakan rotasi piringan diatur dengan layar
dan penghitungan dimulai
14.Setelah layar melewati pin dari shutter rilis, kawat dilepaskan lagi dan
dikunci
15.Setelah layar melewati light barrier, penghitungan dihentikan
Pengukuran kecepatan sudut sebagai fungsi waktu
16.Tombol pilihan light barrier diletakkan pada
17.Tombol reset pada light barrier ditekan
18.Pengunci kawat penghubung dilepaskan, diatur gerak rotasi piringan dengan layar, counter menunjukkan “0000”
19.Setelah layar melewati light barrier, penghitungan dimulai oleh counter.
Penghitungan berhenti ketika layar digerakkan keluar dari jalannya cahaya
20.Untuk menentukan percepatan sebagai fungsi gaya, masa pada tempat
pemberat ditambah 1 g tiap waktu. Pengaruh percepatan pada jarak
ditentukan dengan masa konstan.
Gambar 2. Koneksi pada light barrier
Evaluasi
Hubungan antara momentum sudut L pada benda pejal pada system koordinat
19 L
dT d
T (1)
Momentum sudut dipengaruhi oleh kecepatan sudut ω dan tensor inersia Î dari :
Pada permasalahan sekarang, ω memiliki arah sumbu inersia (sumbu z), sehingga
L hanya memiliki satu komponen :
. z z I
L
Dimana Iz adalah komponen z pada tensor inersia pada piringan.
Sehingga persamaan 1 menjadi
dt
Gambar 3. Momen dari gaya berat pada meja putar
Seperti ditunjukkan pada gambar 3,
g m r Tz . .
Sehingga persamaan gerak menjadi
20 Dan untuk rotasi sudut φ dengan keadaan awal
0 ) 0 (
2
2 1 )
( t
I mgr t
z
(4)
Gambar 4. Sudut rotasi sebagai fungsi waktu dengan percepatan sudut konstan
untuk m = 0.01 kg, r = 0.015 m
Gambar 5. Kecepatan sebagai fungsi waktu dengan percepatan sudut konstan
untuk m = 0.01 kg, r = 0.015 m
Dari regresi linier nilai pengukuran pada gambar 4, dengan persamaan
eksponensial
B X A
Y .
Nilai eksponen didapatkan B2.005
21 X
B A
Y .
Kemiringan didapatkan B0.114
Sehingga momen inersia Iz 0.0129kgm2