PENGARUH PENGATURAN KECEPATAN MOTOR DC
DENGAN PENGATURAN TAHANAN JANGKAR
TERHADAP EFFISIENSI MOTOR DC SHUNT
Armansyah
Program Studi Teknik Elektro, Fakultas Teknik UISU armansyah@ft.uisu.ac.id
Abstrak
Motor arus searah merupakan salah satu motor listrik yang sering digunakan oleh industri-industri yang membutuhkan hasil kerja yang konstan. Hal tersebut dikarenakan motor arus searah menggunakan sumber tegangan DC sebagai sumber tegangannya. Untuk kebutuhan yang semakin lama semakin kompleks yaitu kebutuhan yang menginginkan adanya variasi dari kecepatan motor arus searah maka ada beberapa metode yang bisa digunakan dan salah satunya adalah pengaturan kecepatan motor dengan menggunakan pengaturan tahanan rangkaian jangkar (Ra). Tetapi dikarenakan adanya penambahan tahanan pada metode tersebut maka dapat merubah besaran-besaran yang ada pada motor tersebut terutama pada effisiensi motor. Maka dari itu dalam tulisan ini akan melihat seberapa besar pengaruh pengaturan kecepatan motor arus searah menggunakan tahanan rangkaian jangkar terhadap effisiensi motor DC shunt.
Kata-kata Kunci : Motor DC, Kecepatan, Pengaturan, Tahanan
I. Pendahuluan
Suatu mesin listrik berfungsi sebagai motor listrik apabila terjadi proses konversi energi listrik menjadi energi mekanik di dalamnya. Motor DC adalah motor yang memerlukan suplai tegangan searah pada kumparan jangkar dan kumparan medan untuk diubah menjadi energi mekanik. Berdasarkan karakteristiknya, motor arus searah ini mempunyai daerah pengaturan putaran yang luas dibandingkan dengan motor arus bolak-balik, sehingga sampai sekarang masih banyak digunakan pada pabrik-pabrik yang mesin produksinya memerlukan pengaturan putaran yang memiliki banyak variasi.
Secara umum ada tiga metode pengaturan yang sering digunakan untuk mengatur kecepatan motor yaitu pengaturan arus medan (field current control), pengaturan tahanan rangkaian jangkar (Armatur circuit resistance control), pengaturan tegangan terminal jangkar (Armatur terminal voltage control).
Dengan adanya beberapa metode pengaturan kecepatan tersebut maka ada beberapa komponen yang akan diubah atau ditambahkan ke motor DC sehingga terjadi perubahan dari beberapa besaran yang ada pada motor DC tersebut salah satunya yaitu nilai effisiensi dari motor DC .
II. Tinjauan Pustaka
2.1 Motor DC Shunt
Motor Shunt adalah motor penguat sendiri di mana lilitan penguat magnetnya dihubungkan paralel dengan lilitan jangkar atau dihubungkan langsung dengan sumber tegangan dari luar, ini dapat dilihat pada Gambar 1 dan Gambar 2.
Gambar 1. Bagian Komponen Motor DC Shunt
Gambar 2. Rangkaian listrik Motor DC Shunt
Persamaan-persamaan yang berlaku pada motor
shunt adalah:
Vt = Ea + ( Ia x Ra )
IL = Ia + Ish
Di mana :
Vt = Tegangan jepit / tegangan masukan ke motor ( Volt )
Ia = Arus jangkar ( Ampere )
Ra = Tahanan Jangkar ( Ohm )
Ish = Arus kumparan medan shunt ( Ampere )
Rsh= Tahanan medan shunt ( Ohm )
IL = Arus dari jala – jala ( Ampere )
Jika persamaan di atas dikalikan dengan Ia, kita
peroleh:
Vt Ia = Ea Ia + Ia2 Ra
Persamaan ini dikenal dengan persamaan daya motor DC penguatan shunt.
Dimana,
Vt Ia = Daya listrik yang diberikan ke jangkar (daya
masukan jangkar)
Ea Ia = Daya yang dibangkitkan oleh jangkar (daya
keluaran jangkar )
Ia2Ra =Daya listrik yang terbuang di dalam jangkar
(rugi tembaga jangkar)
Dengan demikian diketahui bahwa dari keluaran daya masukan jangkar sebagian kecil terbuang sebagai rugi tembaga jangkar ( Ia2 Ra ) dan sebagian
lainnya (Ea Ia ) dikonversikan menjadi energi
mekanis di dalam jangkar.
2.2 Karakteristik Motor Shunt
Gambar 2 menunjukkan rangkaian listrik dari suatu motor DC shunt. Arus medan Ish besarnya
konstan karena kumparan medan langsung terhubung dengan tegangan sumber Vt yang
dianggap konstan. Oleh karena itu fluksi di dalam motor shunt hampir dapat dikatakan konstan.
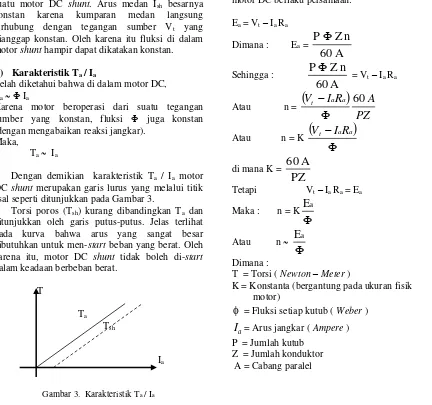
(i) Karakteristik Ta / Ia
Telah diketahui bahwa di dalam motor DC, Ta ~ Φ Ia
Karena motor beroperasi dari suatu tegangan sumber yang konstan, fluksi Φ juga konstan (dengan mengabaikan reaksi jangkar).
Maka,
Ta ~ Ia
Dengan demikian karakteristik Ta / Ia motor
DC shunt merupakan garis lurus yang melalui titik asal seperti ditunjukkan pada Gambar 3.
Torsi poros (Tsh) kurang dibandingkan Ta dan
ditunjukkan oleh garis putus-putus. Jelas terlihat pada kurva bahwa arus yang sangat besar dibutuhkan untuk men-start beban yang berat. Oleh karena itu, motor DC shunt tidak boleh di-start
dalam keadaan berbeban berat.
T
Ta
Tsh
Ia
(ii) Karakteristik n / Ia
Kecepatan motor DC diberikan dengan Persamaan,
n ~
E
Fluksi Φ dan GGL lawan Ea di dalam motor
DC shunt hampir konstan di bawah kondisi normal. Dengan demikian, kecepatan motor DC shunt selalu konstan walaupun arus jangkar berubah-ubah nilainya. Dengan kata lain, ketika beban bertambah, Ea = Vt - ( Ia Ra ) dan Φ berkurang karena drop
tahanan jangkar dan reaksi jangkar. Bagaimanapun, Ea berkurang lebih sedikit daripada Φ sehingga
dengan demikian kecepatan motor menurun sedikit dengan pertambahan beban.
(iii) Karakteristik n / Ta
Suatu kurva diperoleh dengan menggambarkan nilai n dan Ta untuk berbagai arus jangkar. Dapat
dilihat bahwa kecepatan agak menurun seiring dengan pertambahan beban.
2.3 Metode Pengaturan Kecepatan Motor Arus Searah
Sebagaimana telah diketahui bahwa di dalam motor DC berlaku persamaan:
Ea = Vt– Ia Ra
Dimana : Ea =
A
60
n
Z
P
Sehingga :A
60
n
Z
P
= Vt– Ia Ra
Atau n =
PZ
A
R
I
V
t a a60
Atau n = K
a a tI
R
V
di mana K =
PZ
A
60
Tetapi Vt– Ia Ra = Ea
Maka : n = K
aE
Atau n ~
aE
Dimana :
T = Torsi ( Newton–Meter )
K = Konstanta (bergantung pada ukuran fisik motor)
= Fluksi setiap kutub ( Weber )a
I
= Arus jangkar ( Ampere ) P = Jumlah kutubDengan demikian di dalam motor DC, kecepatan berbanding lurus dengan GGL Ea dan
berbanding terbalik dengan fluks per kutub Φ. Untuk mengatur kecepatan motor DC shunt ada beberapa cara yang dapat digunakan, salah satunya adalah dengan menambahkan tahanan yang terhubung seri (Rs) dan terhubung paralel (Rp)
terhadap tahanan jangkar motor DC shunt. Dengan penambahan tahanan seri (Rs) pada jangkar dan
tahanan paralel (Rp) pada jangkar motor DC shunt
tersebut berpengaruh tehadap effisiensi motor DC
shunt.
2.4 Rangkaian percobaan Motor DC Shunt Ada 2 macam pengaturan kecepatan motor DC dengan pengaturan tahanan jangkar yang dicobakan:
1. Dengan penambahan tahanan (Rs) terhubung
seri dengan tahanan jangkar pada motor DC
shunt.
Gambar 4. Rangkaian motor DC shunt dengan tahanan Rs terhubung seri dengan tahanan jangkar
motor DC shunt
2. Dengan penambahan tahanan (Rs) terhubung
seri dan dengan penambahan tahanan (Rp)
terhubung paralel dengan tahanan jangkar pada motor DC shunt.
Gambar 5. Rangkaian motor DC shunt dengan Rs
terhubung seri dan Rp terhubung paralel
terhadap tahanan jangkar motor
Dengan penambahan Rs yang terhubung seri
terhadap jangkar motor DC shunt.
Gambar 6. Rangkaian motor DC shunt dengan penambahan tahanan Rs dan dengan beban
generator
Dengan penambahan Rs yang terhubung seri
terhadap jangkar dan Rp yang terhubung paralel
dengan jangkar motor DC shunt.
Gambar 7. Rangkaian motor DC shunt dengan penambahan tahanan Rs , Rp dan dengan
beban generator
Berikut adalah data yang didapatkan dari percobaan yang dilakukan dengan penambahan tahanan seri (Rs) pada tahanan jangkar dan tahanan
Paralel (Rp) pada tahanan jangkar medan motor DC shunt.
Tabel 1. Saat penambahan Rs dengan Vt = 220 Volt,
Im = 0,64 Ampere dan beban di jaga konstan
No RS
(Ohm) Ia
(A) IL
(A)
N
(rpm)
1 0 4,18 4,81 1320
2 5 4,16 4,79 1300
3 10 4,13 4,76 1260
4 15 4,11 4,74 1210
5 20 4,10 4,73 1150
Tabel 2. Saat penambahan tahanan Rp dengan Rs = 25
Ohm, Vt = 220 Volt, Im=0,64 A dan beban
dijaga konstan No RP
(Ohm) Ia1
(A)
Ia2
(A) IL
(A) N
(RPM)
1 10 1,21 2,98 4,83 1100
2 15 1,57 2,59 4,79 1000
3 25 2,08 2,09 4,81 900
Tabel 3. Saat penambahan tahanan Rp dengan
Rs = 20 Ohm, Vt = 220 Volt, Im=0,64 A
dan beban dijaga konstan No RP
(Ohm) Ia1
(A)
Ia2
(A) IL
(A) N
(RPM)
1 10 1,36 2,75 4,75 1150
2 15 1,72 2,35 4,73 1100
3 25 2,28 1,83 4,76 950
Tabel 4. Saat penambahan tahanan Rp dengan
Rs = 15 Ohm, Vt = 220 Volt, Im=0,64 A
dan beban yang di jaga konstan No RP
(Ohm) Ia1
(A)
Ia2
(A) IL
(A) n
(RPM)
1 10 1,64 2,48 4,76 1175
2 15 2,07 2,06 4,75 1050
3 25 2,58 1,55 4,76 1000
III. Analisa
Dari hasil percobaan yang telah dilakukan, dapat diperoleh bahwa dari data teori dan praktek bisa diambil dan dapat dibandingkan. Untuk pengambilan data agar diketahui hasil akhir perbandingan effisiensi motor DC shunt maka dicari terlebih dahulu konstanta CxФ nya dengan nilai Ia,
n yang berubah-ubah sesuai dengan data hasil percobaan yang tercantum pada Tabel 1, 2, 3, dan 4
Tabel 5. Nilai C x Ф pada saat penambahan Rs,
Im=0,64 A
RS
(Ohm) Ia
(A) IL
(A) n
(rpm)
C x Ф
0 4,18 4,81 1350 0,15
5 4,16 4,16 1300 0,14
10 4,13 4,13 1250 0,13
15 4,11 4,11 1200 0,12
20 4,10 4,10 1170 0,12
25 4,08 4,08 1000 0,10
Tabel 6. Perhitungan n ( rpm ) teori dengan perubahan nilai Rs
No RS
(Ohm)
n (rpm)
teori
n (rpm)
praktek
1 0 1387 1350
2 5 1337,92 1300
3 10 1283,76 1250
4 15 1221,66 1200
5 20 1262,8 1170
6 25 1063,4 1000
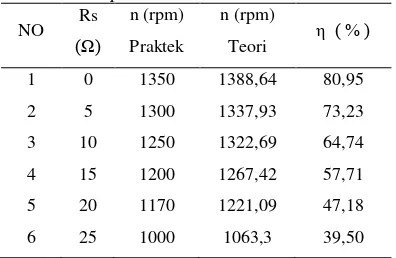
Tabel 7. Perhitungan nilai effisiensi motor DC shunt saat penambahan Rs
NO Rs (Ω)
n (rpm) n (rpm)
η ( % ) Praktek Teori
1 0 1350 1388,64 80,95
2 5 1300 1337,93 73,23
3 10 1250 1322,69 64,74
4 15 1200 1267,42 57,71
5 20 1170 1221,09 47,18
6 25 1000 1063,3 39,50
Dari Tabel 7 di atas telah didapatkan nilai effisiensi motor DC shunt dengan perubahan nilai Rs terhubung seri terhadap tahanan jangkar dan nilai
effisiensi tersebut dapat terlihat jelas pada grafik Gambar 7.
Gambar 7. Pengaruh penambahan tahanan Rs
terhadap effisiensi motor DC shunt
Tabel 8. Perhitungan nilai effisiensi motor DC shunt saat Rs = 25 Ohm dan Rp = 10,15,25 Ohm
No RS
(Ohm) RP
(Ohm)
n (rpm)
praktek
η ( % )
1 25 10 1100 75,38
2 25 15 1000 71,86
Dari Tabel 8 di atas telah didapatkan nilai effisiensi motor DC shunt dengan perubahan nilai Rs = 25
Ohm dan Rp = 10, 15, 25 Ohm dan nilai effisiensi
tersebut dapat dilihat pada grafik Gambar 8.
IV. Kesimpulan
Dari analisa maka dapat kita simpulkan yaitu : 1. Penambahan tahanan terhubung seri (Rs)
terhadap tahanan jangkar menyebabkan berkurangnya nilai arus jangkar (Ia) yang
mengalir pada motor DC shunt sehingga mengurangi besarnya tegangan ke jangkar motor dan hal tersebut mengurangi kecepatan motor DC shunt.
2. Penggabungan penambahan tahanan yang terhubung paralel (Rp) dan seri (Rs) terhadap
tahanan jangkar merupakan suatu cara yang lain selain hanya penambahan tahanan (Rs) yang
dapat mengatur kecepatan motor di bawah kecepatan nominalnya karena mempengaruhi nilai dari arus jangkar yang mengalir akan pada motor DC shunt.
3. Semakin besar nilai tahanan yang ditambahkan untuk pengaturan kecepatan motor ini semakin rendah nilai effisiensi motor DC shunt.
Daftar Pustaka
[1] A.E.Fitzgerald, Charles Kingsley, Jr. Stephen, 1997, Mesin–Mesin Listrik, (terjemahan D. Umans Achyanto, Djoko, Edisi Keempat, Penerbit Erlangga, Jakarta. [2] B.L. Theraja, 1978, A Text Book Of
Electrical Technologi, Revised Edition, S.Chan & Company, New Delhi.
[3] http:///E:/TA%20USU/mesin-arus-searah.html
[4] http:E:/TA%20USU/Jenis-Jenis%20 motor %20DC%20%C2%AB%20
Azzahratunnisa. htm Gambar 8. Pengaruh penambahan tahanan Rs