Analisis perbaikan faktor daya beban RLC
Teks penuh
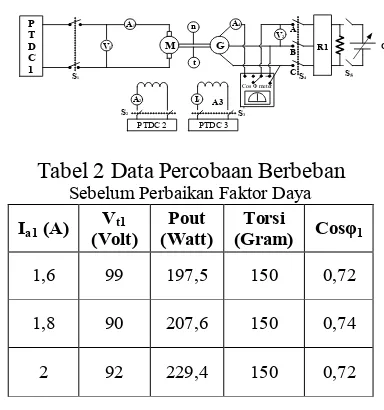
Gambar
![Gambar 2 Diagram Metode SegiTiga [6]](https://thumb-ap.123doks.com/thumbv2/123dok/3992422.1935842/2.612.122.302.137.304/gambar-diagram-metode-segitiga.webp)
![Gambar 7 Beban Kapasitif [5]](https://thumb-ap.123doks.com/thumbv2/123dok/3992422.1935842/3.612.342.525.66.163/gambar-beban-kapasitif.webp)
Dokumen terkait
The energy carried by the sound wave converts back and forth between the potential energy of the extra compression (in case of longitudinal waves) or lateral displacement strain
Setelah itu guru menyampaikan topik pembelajaran yang akan dipelajari oleh siswa dengan materi kelompok sosial, selanjutnya guru menanyakan kepada siswa mengenai materi
(3) Undang-undang Nomor 18 Tahun 2003 tentang Advokat, agar dapat mempunyai kekuatan hukum mengikat, Undang-undang Nomor 18 Tahun 2003 tentang Advokat, dengan menambahkan
Untuk mengurangi biaya yang harus dikeluarkan perusahaan dalam melakukan penilaian terhadap mereknya, maka sebaiknya manager Dunkin Donut’s lebih memperioritaskan
Jika sektor perikanan berkontribusi lebih baik (tinggi) pada PDRB seharusnya sektor perikanan ini bisa menopang nilai tambah yang dihasilkan, bukan hanya pendapatan
Pernikahan yang terjadi karena adanya kehamilan di luar nikah (married by accident) akibat adanya perilaku seks pranikah marak terjadi kepada remaja seiring
Menyetujui memberikan wewenang dan kuasa kepada Direksi Perseroan, dengan hak substitusi, untuk melakukan segala dan setiap tindakan yang diperlukan sehubungan keputusan
Ukuran orang-orang yang menderita Thalasemia, yaitu penyakit darah dimana sel-sel darahnya tidak bisa hidup sepanjang waktu yang normal, penghancuran sel darahnya lebih
