i
PRINSIP MAKSIMUM PONTRYAGIN DALAM MODEL PENYEBARAN PENYAKIT
SKRIPSI
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Sains
Program Studi Matematika
Oleh :
Yustina Astri Wijayanti NIM : 103114015
PROGRAM STUDI MATEMATIKA JURUSAN MATEMATIKA
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
PONTRYAGIN’S MAXIMUM PRINCIPLE
IN THE MODEL OF THE SPREAD OF DISEASE
A THESIS
Presented As Partial Fulfillment of the Requirements
To Obtain the Sarjana Sains Degree of
Mathematics Study Program
Written by: Yustina Astri Wijayanti
Student ID: 103114015
MATHEMATICS STUDY PROGRAM MATHEMATICS DEPARTMENT FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY YOGYAKARTA
iii SKRIPSI
PRINSIP MAKSIMUM PONTRYAGIN DALAM MODEL PENYEBARAN PENYAKIT
Disusun oleh:
Yustina Astri Wijayanti
NIM : 103114015
Telah disetujui oleh:
Dosen Pembimbing Skripsi,
iv SKRIPSI
PRINSIP MAKSIMUM PONTRYAGIN DALAM MODEL PENYEBARAN PENYAKIT
Dipersiapkan dan ditulis oleh: Yustina Astri Wijayanti
103114015
Telah dipertahankan di depan Panitia Penguji pada tanggal 14 November 2014 dan dinyatakan telah memenuhi syarat
Susunan Panitia Penguji
Nama Lengkap Tanda
Tangan
Ketua Ir. Ig. Aris Dwiatmoko, M.Sc. ……….
Sekretaris Dr. rer.nat. Herry Pribawanto Suryawan, M.Si ……….
Anggota Hartono, S.Si., M.Sc., Ph.D ……….
Yogyakarta, 18 November 2014 Fakultas Sains dan Teknologi
Universitas Sanata Dharma Dekan,
v
HALAMAN PERSEMBAHAN
Karya ini sebagai bukti kasih setia Tuhan Yesus dalam hidupku.
“Oleh Dia kita juga beroleh jalan masuk oleh iman kepada kasih karunia ini. Di
dalam kasih karunia ini kita berdiri dan kita bermegah dalam pengharapan
menerima kemuliaan Allah”.
( Roma 5:2 )
“Janganlah hendaknya kamu kuatir tentang apapun juga, tetapi nyatakanlah
dalam segala hal keinginanmu kepada Allah dalam doa dan permohonan ucapan
syukur”.
(Filipi 4:6)
Karya ini aku persembahkan untuk :
Orang-orang terkasih: bapak, ibu, dan kakakku
vi
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa skripsi yang saya tulis ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan atau daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 3 November 2014
Penulis
vii ABSTRAK
Yustina Astri Wijayanti. 2014. Prinsip Maksimum Pontryagin dalam Model Penyebaran Penyakit. Skripsi. Program Studi Matematika, Jurusan Matematika, Fakultas Sains dan Teknologi, Universitas Sanata Dharma, Yogyakarta.
Topik yang dibahas dalam skripsi ini adalah aplikasi model SEIR dalam penyebaran penyakit, terutama penyakit menular. Penyakit menular merupakan suatu penyakit yang penyebarannya mempunyai dampak buruk bagi kehidupan individu dalam populasi. Tulisan ini akan membahas mengenai bagaimana mengurangi penyebaran penyakit dengan meminimalkan banyaknya individu yang terinfeksi. Untuk itu diperlukan suatu kontrol yaitu pemberian vaksin. Dalam hal ini, teori matematika yang digunakan adalah kontrol optimal dan model penyebaran penyakitnya adalah model SEIR. Model SEIR merupakan model penyebaran penyakit yang memperhatikan empat komponen, yaitu banyaknya individu yang rentan penyakit, banyaknya individu yang masuk dalam masa inkubasi, banyaknya individu yang terinfeksi penyakit, dan banyaknya individu yang sembuh dari penyakit. Keempat komponen tersebut diilustrasikan ke dalam model matematika berupa sistem persamaan diferensial dengan enam variabel dan lima persamaan.
Model SEIR akan diselesaikan menggunakan metode - metode kontrol optimal, yaitu prinsip maksimum Pontryagin dan metode sweep maju – mundur. Sedangkan system persamaan diferensial yang ada akan diselesaikan menggunakan metode Runga-Kutta orde-4. Selain itu, akan digunakan pula suatu teori matematika untuk linearisasi sistem persamaan diferensial untuk menyelesaikan model yang tidak memperhatikan kontrol.
Model SEIR yang disusun berdasarkan teori – teori matematika di atas dapat membantu mengambil keputusan untuk menurunkan penyebaran penyakit melalui pengendali anti virus, sehingga banyaknya individu yang terinfeksi pun juga akan mengalami penurunan.
viii ABSTRACT
Yustina Astri Wijayanti. 2014. Pontryagin Maximum Principle In Models Of Disease Spread. A Thesis. Mathematics Study Program, Departement of Mathematics, Faculty of Science and Technology, Sanata Dharma University, Yogyakarta.
The topic of this thesis is the application of SEIR model in diseases spread, especially for infectious diseases. Infectious diseases is a disease whose spreading has negative consequences for the individuals living in the population. This paper will discuss how to reduce the spread of disease by minimizing the number of infected individuals. So we need a control so called vaccine. In this case, the mathematical theory used is the optimal control and model of the spread of the disease is SEIR model. SEIR Model is a model of the spread of the disease which consider four components, namely the number of individuals who are susceptible, in the incubation period, infected, and recovering from disease. These four components are illustrated in the form of a mathematical model of the system of differential equations with six variables and five equations.
The SEIR model will be solved using optimal control method, namely the Pontryagin maximum principle and the forward - backward sweep method. The existing system of differential equations will be solved using Runga-Kutta method of order-4. Moreover, a mathematical theory for linearized system of differential equations will also be used to solve the model which does not consider control.
Model Seir based on the mathematical theory above can help take the decision to reduce the spread of disease through anti-virus control, so that the number of infected individuals will also decrease.
ix
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yesus Kristus yang
telah melimpahkan berkat dan kasihNya sehingga penulis dapat
menyelesaikan skripsi ini dengan baik.
Dalam penulisan skripsi ini penulis mendapatkan bantuan baik moril
maupun materiil dari berbagai pihak. Oleh karena itu, penulis ingin
mengucapkan terima kasih kepada :
1. Ibu Paulina Heruningsih Prima Rosa, S.Si., M.Sc., selaku Dekan
Fakultas Sains dan Teknologi, Universitas Sanata Dharma.
2. YG. Hartono, S.Si., M.Sc., Ph.D, selaku dosen pembimbing skripsi dan
Ketua Program Studi Matematika yang telah meluangkan banyak waktu
dan membimbing penulis dengan penuh kesabaran.
3. Ir. Ig. Aris Dwiatmoko, M.Sc., selaku dosen pembimbing akademik.
4. Bapak, Ibu, dan Romo, dosen-dosen yang telah memberikan ilmu yang
berguna kepada penulis.
5. Kedua orang tua, Bapak D. Suratija dan Ibu Suwarti, yang selalu
mendukung penulis dengan doa, semangat, dan materi.
6. Teman – temanku; Arga, Ratri, Ayu, Tika, Pandu, Sari, Dini, Celly, Leni, Agnes, Yohan, Roy, Marsel, dan Yosi, terima kasih untuk canda
x
7. Teman – teman adik tingkat 2012: Happy, Noni, Giri, terima kasih untuk doa, semangat, dan keceriaan yang selalu diberikan kepada
penulis.
8. Semua pihak yang telah ikut membantu penulis dalam menyelesaikan
skripsi ini.
Penulis menyadari bahwa skripsi ini masih jauh dari sempurna. Oleh
karena itu, penulis mengharapkan kritik dan saran yang dapat membangun
serta menyempurnakan skripsi ini. Akhirnya, penulis berharap semoga skripsi
ini dapat memberikan wawasan dan pengetahuan bagi pembaca.
Yogyakarta, 3 November 2014
xi
LEMBAR PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata
Dharma :
Nama : Yustina Astri Wijayanti
NIM : 103114015
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas Sanata Dharma, Karya Ilmiah saya yang berjudul :
Prinsip Maksimum Pontryagin dalam Model Penyebaran Penyakit
beserta perangkat-perangkat yang diperlukan (bila ada). Dengan demikian, saya memberikan kepada Universitas Sanata Dharma dan hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelola dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan mempublikasikannya di internet atau media lain untuk kepentingan akademis tanpa perlu minta ijin dari saya maupun memberi royalti kepada saya selama tetap mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini saya buat sebenarnya.
Dibuat di Yogyakarta
Pada tanggal : 4 November 2014
Yang menyatakan
xii DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
HALAMAN JUDUL DALAM BAHASA INGGRIS ... ii
HALAMAN PERSETUJUAN PEMBIMBING ... iii
HALAMAN PENGESAHAN ... iv
HALAMAN PERSEMBAHAN ... v
PERNYATAAN KEASLIAN KARYA ... vi
ABSTRAK ... vii
ABSTRACT ... viii
KATA PENGANTAR ... ix
PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH ... xi
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
DAFTAR TABEL ... xvii
DAFTAR LAMPIRAN ... xviii
BAB I PENDAHULUAN ... 1
A.Latar Belakang ... 1
B.Rumusan Masalah ... 7
C.Batasan Masalah ... 7
D.Tujuan Penulisan ... 8
xiii
F. Metode Penulisan ... 8
G.Sistematika Penulisan ... 9
BAB II LANDASAN TEORI ... 11
A. Kontinu Sepotong - Sepotong ... 11
B. Deret Taylor ... 16
B.1. Definisi ... 16
B.2. Tingkat Keakuratan Hampiran ... 17
C. Metode Euler ... 19
D. Metode Runga - Kutta ... 20
E. Kestabilan Persamaan Diferensial ... 21
1. Pendahuluan... 21
2. Penyelesaian Umum Persamaan Diferensial ... 22
3. Titik Kesetimbangan... 23
4. Kestabilan ... 28
BAB III PRINSIP MAKSIMUM PONTRYAGIN ... 30
A. Kontrol Optimal ... 30
B. Contoh – Contoh Kontrol Optimal ... 31
C. Syarat Perlu Optimalitas ... 35
D. Langkah – Langkah Penyelesaian ... 48
BAB IV KONTROL YANG TERBATAS ... 61
A. Pendahuluan ... 61
B. Contoh – Contoh Soal ... 65
BAB V METODE SWEEP MAJU - MUNDUR ... 72
xiv
B. Metode Sweep Maju - Mundur ... 73
C. Contoh Masalah ... 76
BAB VI APLIKASI MODEL SEIR ... 91
A. Pendahuluan ... 91
B. Model SEIR Tanpa Kontrol dalam Penyebaran Penyakit ... 92
B.1. Pendahuluan ... 92
B.2. Penurunan Rumus ... 95
B.3. Pelinearan Sistem Secara Umum ... 96
B.4. Ilustrasi Linearisasi Sistem ... 101
B.5. Analisa Data ... 120
C. Model SEIR Dengan Kontrol dalam Penyebaran Penyakit ... 123
C.1. Pendahuluan ... 123
C.2. Penurunan Rumus ... 124
C.3. Analisa Data ... 127
BAB VII PENUTUP ... 130
A. Kesimpulan ... 130
B. Saran ... 131
DAFTAR PUSTAKA ... 132
xv
DAFTAR GAMBAR
Gambar 1.1 Diagram alur penyebaran penyakit ... 2
Gambar 2.1 Fungsi sepotong - sepotong ... 12
Gambar 2.2 Fungsi cekung ... 14
Gambar 2.3 Penyelesaian persamaan diferensial dengan titik sadle... 25
Gambar 2.4 Penyelesaian persamaan diferensial dengan titik nodal sink ... 25
Gambar 2.5 Penyelesaian persamaan diferensial dengan titik nodal source .. 26
Gambar 2.6 Penyelesaian persamaan diferensial dengan titik spiral sink ... 26
Gambar 2.7 Penyelesaian persamaan diferensial dengan titik spiral source .. 27
Gambar 2.8 Penyelesaian persamaan diferensial dengan titik center ... 27
Gambar 3.1 Peluncuran roket ... 33
Gambar 3.2 Grafik kontrol optimal ... 36
Gambar 3.3 Grafik tiga kondisi λ,x.u contoh 3.1 ... 51
Gambar 3.4 Grafik tiga kondisi λ,x.u contoh 3.2 ... 56
Gambar 3.5 Grafik 3 8 t 3 1 ) t ( λ 3 ... 59
Gambar 3.6 Grafik 18 17 ) t ln( 3 4 t 18 1 ) t ( x 3 ... 59
Gambar 3.7 Grafik 3 t 3 8 t 2 1 ) t ( u 3 ... 60
Gambar 4.1 Grafik kondisi optimal λ(t) contoh 4.1... 70
Gambar 4.2 Grafik kondisi optimal u(t) contoh 4.1 ... 71
xvi
Gambar 5.1 Grafik tiga kondisi optimal λ,x.u contoh 5.2 ... 86
Gambar 5.2 Grafik tiga kondisi optimal λ,x.u contoh 5.3 ... 89
Gambar 6.1 Diagram alur model SEIR tanpa kontrol ... 93
Gambar 6.2 Grafik kasus 1 pada titik kesetimbangan yang pertama ...121
Gambar 6.3 Grafik kasus 1 pada titik kesetimbangan yang kedua ...122
Gambar 6.4 Diagram alur model SEIR dengan kontrol ...123
xvii DAFTAR TABEL
Halaman
xviii DAFTAR LAMPIRAN
Halaman
Lampiran 1 Program Metode Sweep Maju - Mundur ... 133
1 BAB I
PENDAHULUAN
A. LATAR BELAKANG
Setiap individu mempunyai tingkat kekebalan tubuh yang berbeda – beda. Ada individu yang tingkat kekebalan tubuhnya lemah dan ada pula yang tingkat
kekebalan tubuhnya kuat. Lemahnya kekebalan tubuh akan menimbulkan suatu
dampak yang cukup besar dalam kehidupan individu itu sendiri. Salah satu di
antaranya adalah individu itu akan mudah terserang penyakit, terutama untuk
penyakit menular. Dalam suatu populasi tertentu yang ditinggali oleh sebagian
besar individu dengan kekebalan tubuh yang lemah dan satu di antaranya sudah
terserang penyakit menular, maka akan dengan mudah penyakit tersebut
menyerang ke individu lainnya. Penyakit menular tersebut ada kemungkinan akan
menyerang banyak individu dan bisa saja melebihi batas normal atau melebihi
keadaan wajarnya. Penyebaran penyakit yang tidak wajar tersebut biasa disebut
dengan wabah.
Pada suatu saat t, model penyebaran penyakit biasanya
mempertimbangkan empat komponen, di antaranya banyaknya individu yang
rentan penyakit, banyaknya individu yang masih dalam masa inkubasi, banyaknya
individu yang terinfeksi penyakit, dan banyaknya individu yang sudah pulih /
sembuh dari penyakit. Keempat individu tersebut berturut - turut dinotasikan
keseluruhan dalam suatu populasi tertentu dinotasikan dengan N(t). Secara
umum, banyaknya individu keseluruhan pada saat t adalah
) t ( R ) t ( I ) t ( E ) t ( S ) t (
N (Lenhart & Workman, 2007). Oleh karena itu,
model penyebaran penyakit tersebut dapat dirumuskan dengan model SEIR.
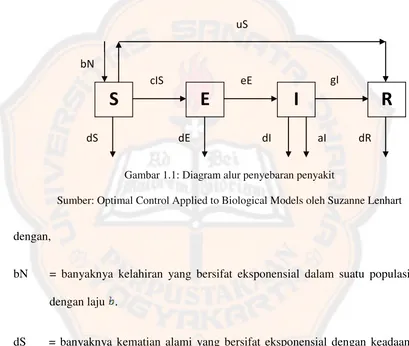
Model SEIR itu sendiri dapat digambarkan diagram alurnya sebagai berikut:
Gambar 1.1: Diagram alur penyebaran penyakit
Sumber: Optimal Control Applied to Biological Models oleh Suzanne Lenhart
dengan,
bN = banyaknya kelahiran yang bersifat eksponensial dalam suatu populasi
dengan laju .
dS = banyaknya kematian alami yang bersifat eksponensial dengan keadaan
individu yang rentan penyakit dengan laju
cIS = banyaknya kejadian penyakit yang timbul dengan laju
uS = banyaknya pemberian vaksin sebagai kontrol atas individu yang rentan
penyakit dengan laju
S
E
I
R
bN
cIS
dS dE
uS
eE
dI aI
gI
eE = banyaknya individu dalam masa peralihan, dari individu yang masih
tidak terlindungi menjadi individu yang terinfeksi dengan laju
dE = banyaknya kematian alami yang bersifat eksponensial dengan keadaan
individu yang tidak terlindungi dengan laju
gI = banyaknya individu terinfeksi penyakit yang sembuh dengan laju
dI = banyaknya kematian alami yang bersifat eksponensial dengan keadaan
individu yang masih terinfeksi penyakit dengan laju
aI = banyaknya kematian yang disebabkan oleh individu yeng terinfeksi
penyakit dengan laju
dR = banyaknya kematian alami yang bersifat eksponensial dengan keadaan
individu yang sudah sembuh dengan laju
Dari diagram alur di atas, dapat dijelaskan bahwa banyaknya individu
yang terlahir dalam suatu populasi tertentu pada awalnya individu tersebut masih
rentan terhadap penyakit. Kemudian, dari individu yang rentan tersebut apabila
diberikan vaksin maka individu itu dapat dikelompokkan ke dalam individu yang
sembuh. Selain itu, ada juga kemungkinan mulai muncul penyakit yang kemudian
individu tersebut masuk ke dalam masa inkubasi, yaitu masa di mana individu ada
kemungkinan muncul gejala-gejala terserang penyakit. Namun, dapat juga
individu rentan tersebut meninggal secara alami yang bersifat eksponensial
(membesar tanpa batas). Individu yang masih dalam masa inkubasi yang semula
terinfeksi penyakit, namun dapat juga individunya meninggal secara alami secara
eksponensial. Individu yang sudah terinfeksi mempunyai kemungkinan langsung
sembuh, namun dapat juga menyebabkan banyaknya individu yang meninggal
semakin besar. Kemudian, individu yang sudah sembuh dari penyakit akibat
infeksi dan awalnya dari individu yang rentan penyakit, dapat meninggal secara
alami secara eksponensial.
Dengan melihat uraian di atas yang diperoleh dari diagram sebelumnya,
secara matematis dapat dituangkan ke dalam suatu sistem persamaan diferensial
sebagai berikut:
,
Dalam kenyataannya, memang terdapat penyakit menular yang merambah
di daerah tertentu, seperti penyakit campak. Adanya penyakit tersebut dapat
membawa dampak negatif yang besar bagi kehidupan individu, maka seharusnya
diadakan pemberian vaksin. Vaksinasi tersebut diberikan untuk memberikan
kekebalan pada tubuh individu untuk mencegah terserangnya penyakit. Dengan
adanya pemberian vaksin tersebut diharapkan dapat meminimalkan banyaknya
individu yang terinfeksi. Pemberian vaksin ini berperan sebagai kontrol untuk
membantu mengurangi banyaknya individu yang terinfeksi.
Dengan adanya kontrol dalam permasalahan tersebut, maka permasalahan
Secara umum, kontrol optimal sendiri adalah suatu teori yang digunakan untuk
menyelesaikan permasalahan optimisasi dengan variabel kontrol. Dalam
optimisasi sendiri terdapat dua istilah, yaitu permasalahan maksimalisasi dan
permasalahan minimalisasi. Terdapat dua cara penyelesaian untuk masalah
kontrol optimal ini, yaitu secara analitik dan numerik. Secara analitik, kontrol
optimal dapat diselesaikan dengan beberapa metode, di antaranya adalah Prinsip
Maksimum Pontryagin, Regulator Linear Kuadratik, dan sebagainya. Sedangkan
salah satu metode yang digunakan untuk menyelesaikan secara numerik adalah
Sweep Maju-Mundur. Prinsip Maksimum Pontryagin adalah metode yang
ditemukan oleh seseorang yang berasal dari Uni Soviet yaitu Pontryagin. Prinsip
ini digunakan untuk menyelesaikan permasalahan kontrol optimal dengan variabel
kontrol yang bersifat deterministik dan kontinu terhadap fungsi . Sedangkan
Regulator Linear Kuadratik adalah metode yang digunakan untuk menyelesaikan
permasalahan kontrol optimal dengan variabel kontrol dan variabel keadaan awal
yang linear dan fungsi obyektifnya kuadrat. Permasalahan yang diselesaikan
menggunakan kontrol optimal dirumuskan dalam suatu fungsi obyektif. Fungsi
obyektif tersebut sebagai berikut:
ft
t
u f t x t u t dt
0
)) ( ), ( , ( max
atau
ft
t
u f t x t u t dt
0
di mana x(t) = variabel keadaan; t0 = batas awal
u(t) = variabel kontrol; tf = batas akhir
dengan kendala:
maks min
0 0
u ) t ( u u
awal keadaan x
) t ( x
dt )) t ( u ), t ( x , t ( g ) t ( ' x
Dengan mempertimbangkan variabel kontrol dalam permasalahan
penyebaran penyakit pada bagian terakhir dari dua paragraf sebelumnya, maka
permasalahan penyebaran penyakit dapat diselesaikan menggunakan Prinsip
Maksimum Pontryagin. Dalam hal ini, variabel kontrolnya kontinu terhadap
waktu (t).
Secara analitik, cukup menggunakan metode Prinsip Maksimum
Pontryagin sudah mendapatkan solusinya. Namun, dalam menyelesaikan masalah
secara numerik tidak cukup hanya menggunakan metode Prinsip Maksimum
Pontryagin melainkan harus menggunakan metode Sweep Maju-Mundur.
Permasalahan yang diselesaikan secara analitik akan menghasilkan penyelesaian
yang sebenarnya (sejati). Sedangkan masalah yang diselesaikan secara numerik
akan menghasilkan penyelesaian yang mendekati penyelesaian sejati, biasa
disebut dengan penyelesaian hampiran. Penyelesaian secara numerik digunakan
ketika masalah tidak dapat diselesaikan lagi secara analitik.
Tugas akhir ini akan membahas metode Prinsip Maksimum Pontryagin
Secara numerik akan digunakan metode Runga-Kutta 4 untuk menyelesaikan
persamaan diferensialnya. Dalam hal ini, digunakan metode Runga-Kutta orde 4
karena tingkat keakuratan (galat) yang dihasilkan kecil. Penyelesaian dikatakan
baik ketika galat yang dihasilkan adalah kecil.
Dengan demikian, Prinsip Maksimum Pontryagin dan metode Sweep
Maju-Mundur mempunyai peran yang penting untuk meminimalkan / mengurangi
banyaknya individu yang terinfeksi penyakit, sehingga diperoleh penyelesaian
yang optimal. Dalam tulisan ini, pembahasan permasalahannya hanya dibatasi
pada variabel kontrol yang bersifat deterministik dan kontinu. Untuk
memahaminya, maka diperlukan beberapa materi diantaranya fungsi kontinu,
turunan, persamaan diferensial, dll.
B. RUMUSAN MASALAH
Pokok permasalahan yang akan dibahas dalam tulisan ini yaitu:
1. Apa yang dimaksud dengan Prinsip Maksimum Pontryagin?
2. Apa yang dimaksud dengan metode Sweep maju - mundur?
3. Bagaimana meminimalkan banyaknya individu yang terserang penyakit
menggunakan Prinsip Maksimum Pontryagin dalam kontrol optimal?
C. BATASAN MASALAH
Pembahasan Prinsip Maksimum Pontryagin dalam tulisan ini hanya dibatasi
pada:
2. Tidak ada interaksi antar populasi, yaitu model dikembangkan hanya untuk
satu populasi tertentu.
3. Individu rentan terhadap penyakit.
4. Materi prasyarat hanya dibahas terbatas pada hal – hal pokok.
D. TUJUAN PENULISAN
Tujuan penulisan ini adalah untuk memahami Prinsip Maksimum
Pontryagin dan bagaimana cara menyelesaikan permasalahan kesehatan dalam
meminimalkan banyaknya individu yang terinfeksi penyakit.
E. MANFAAT PENULISAN
Manfaat yang didapat dari tulisan ini adalah untuk memperoleh
pengetahuan tentang Prinsip Maksimum Pontryagin dalam kontrol optimal
untuk menyelesaikan permasalahan kesehatan, yaitu dalam meminimalkan
banyaknya individu yang terinfeksi penyakit dengan variabel kontrol yang
kontinu.
F. METODE PENULISAN
Metode yang digunakan penulis adalah metode studi pustaka, yaitu
dengan mempelajari buku-buku yang berkaitan dengan kontrol optimal,
khususnya Prinsip Maksimum Pontryagin, metode Sweep Maju-Mundur, dan
G. SISTEMATIKA PENULISAN
BAB I PENDAHULUAN
A. Latar Belakang
B. Rumusan Masalah
C. Batasan Masalah
D. Tujuan Penulisan
E. Manfaat Penulisan
F. Metode Penulisan
G. Sistematika Penulisan
BAB II LANDASAN TEORI
A. Kontinu Sepotong - Sepotong
B. Deret Taylor
C. Metode Euler
D. Metode Runga - Kutta
E. Kestabilan Persamaan Diferensial
BAB III PRINSIP MAKSIMUM PONTRYAGIN
A. Kontrol Optimal
B. Contoh-Contoh Kontrol Optimal
C. Dasar dan Syarat Perlu
BAB IV KONTROL YANG TERBATAS
A. Pendahuluan
B. Contoh-Contoh Soal
BAB V METODE SWEEP MAJU-MUNDUR
A. Pendahuluan
B. Metode Sweep Maju-Mundur C. Contoh Masalah
BAB VII APLIKASI MODEL SEIR
A. Pendahuluan
B. Model SEIR tanpa Kontrol dalam Penyebaran Penyakit C. Model SEIR dengan Kontrol dalam Penyebaran Penyakit
BAB VII PENUTUP
A. Kesimpulan B. Saran
11 BAB II
LANDASAN TEORI
Pada bab ini akan dibahas mengenai dasar – dasar matematika yang menjadi dasar dalam pembahasan bab selanjutnya
A. KONTINU SEPOTONG - SEPOTONG Definisi 2.1
Misalkan I R adalah suatu selang/interval. u:I R dikatakan kontinu sepotong-sepotong jika fungsi tersebut kontinu di setiap tI, dengan pengecualian pada sejumlah berhingga titik t, dan jika u mempunyai nilai
yang sama dengan salah satu nilai limit kiri atau limit kanan di setiap tI.
Contoh:
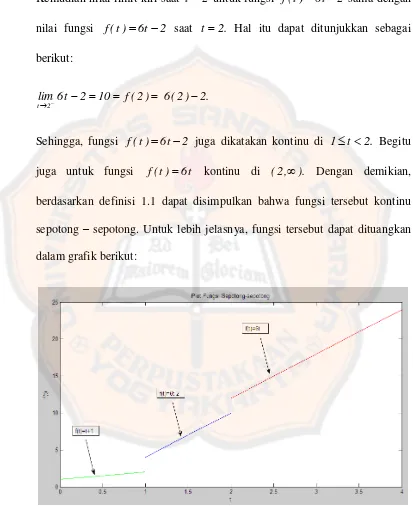
Sketsakan grafik fungsi f berikut dan tentukan apakah f kontinu, kontinu
sepotong-sepotong, atau tidak keduanya pada interval 1t 2 !
1 t , 1
t
) t (
f 6t2, 1t 2
2 t , t
6
Penyelesaian:
Fungsi f(t)t1 kontinu di (,1).
. 2 ) 1 ( 6 ) 1 ( f 4 2 t 6 lim
1 t
Kemudian nilai limit kiri saat t 2 untuk fungsi f(t)6t2 sama dengan nilai fungsi f(t)6t2 saat t2. Hal itu dapat ditunjukkan sebagai berikut:
. 2 ) 2 ( 6 ) 2 ( f 10 2 t 6 lim
2
t
Sehingga, fungsi f(t)6t2 juga dikatakan kontinu di 1t2. Begitu juga untuk fungsi f(t)6t kontinu di (2,). Dengan demikian,
berdasarkan definisi 1.1 dapat disimpulkan bahwa fungsi tersebut kontinu
sepotong – sepotong. Untuk lebih jelasnya, fungsi tersebut dapat dituangkan dalam grafik berikut:
Definisi 2.2
Misalkan x:I R adalah kontinu di I dan mempunyai turunan di setiap
titik tI, dengan pengecualian pada sejumlah berhingga titik dari I.
Andaikan bahwa x' kontinu di mana-mana. Maka, dapat dikatakan bahwa x
mempunyai turunan sepotong-sepotong.
Definisi 2.3
Misalkan k:I R. k dikatakan mempunyai turunan yang kontinu jika k' ada dan kontinu di I .
Definisi 2.4
Suatu fungsi k(t) dikatakan cekung di
a,b jika) t )
α
1 ( t
α
( k ) t ( k )
α
1 ( ) t ( k
α 1 2 1 2
untuk semua 0α1 dan untuk setiap at1,t2 b.
Definisi tersebut juga berlaku untuk kondisi sebaliknya, yaitu k(t) dikatakan
cembung di
a,b jika). t )
α
1 ( t
α
( k ) t ( k )
α
1 ( ) t ( k
α 1 2 1 2
Definisi tersebut dapat diilustrasikan untuk fungsi yang cekung sebagai
berikut:
Misalkan diambil beberapa α untuk αk(t1)(1α)k(t2):
Untuk α0, maka
) t ( k ) t ( k ) 0 1 ( ) t ( k . 0 ) t ( k )
α
1 ( ) t ( k
Untuk α1, maka
) t ( k ) t ( k ) 1 1 ( ) t ( k 1 ) t ( k )
α
1 ( ) t ( k
α 1 2 1 2 1
Sedangkan, untuk 0α1 maka akan diperoleh suatu garis yang menghubungkan k(t1)dengan k(t2 ).
Selanjutnya, diambil beberapa α untuk k(αt1 (1α)t2):
Untuk α0, maka
) t ( k
) t ) 0 1 ( t. 0 ( k ) t )
α
1 ( t
α
( k
2
2 1
2 1
Untuk α1, maka
12 1
2 1
t k
t ) 1 1 ( t. 1 k ) t )
α
1 ( t
α
( k
Sedangkan, untuk 0α1 maka akan diperoleh suatu kurva yang menghubungkan k(t1)dengan k(t2 ).
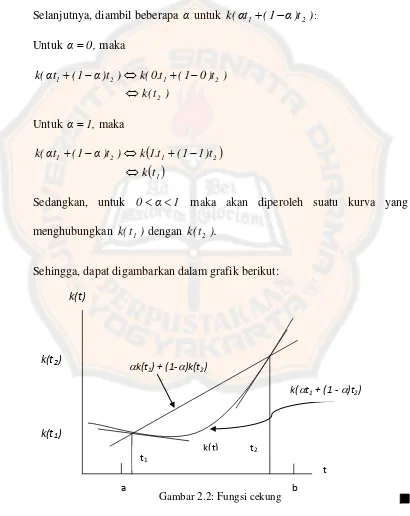
Sehingga, dapat digambarkan dalam grafik berikut:
Gambar 2.2: Fungsi cekung
k(t)
k(t2)
k(t1)
k(t)
k(t1) + (1-)k(t2)
k(t1 + (1 - )t2)
a b
t t1
untuk semua 0α1 dan semua (x1,y1),(x2,y2 ) dalam domain k. Kemudian apabila k adalah suatu fungsi yang cekung dan mempunyai turunan
di mana-mana, maka k mempunyai sifat garis singgung seperti berikut
)
B. DERET TAYLOR B.1. Definisi
terlebih dahulu dijelaskan mengenai deret Taylor dengan orde-2 yang dapat
dituliskan sebagai berikut:
n 2 n
n h x" 2 1 ' hx x ) h t (
x (1.1)
dengan xn,x'n, dan x"n merupakan pendekatan terhadap x(tn),x'(tn ), dan
) t ( "
x n . x"(tn ) merupakan turunan kedua dari x(tn ).
Dari uraian singkat tersebut, dapat dituliskan bentuk umum metode deret
Taylor dengan orde-n pada x(th)sebagai berikut:
) 2 . 1 ( )
t ( R ) t ( x ! n h ... ) t ( " x ! 2 h ) t ( ' hx ) t ( x ) h t (
x n n
n 2
dengan x (ξ)
)! 1 n (
h ) t (
R n 1
1 n
n
adalah suku sisa (galat) dan ξ(t,th).
B.2. Tingkat Keakuratan Hampiran
Tingkat keakuratan suatu hampiran dapat dinyatakan dengan orde
hampiran yang biasanya dituliskan dengan O-besar. Orde hampiran juga
disebut sebagai orde galat. Misalkan bahwa xk adalah nilai pendekatan dari
) t (
x k . Apabila xk menghampiri x(tk ) dengan orde galatnya O(hn ), maka
dapat dinyatakan dalam persamaan berikut:
) h ( O x ) t (
x k k n
Dapat diartikan secara numeris bahwa jika semakin besar nilai n
berarti semakin kecil pula galat yang dihasilkan, sehingga nilai hampirannya
mempunyai tingkat keakuratan yang lebih tinggi / teliti dibandingkan dengan
suatu metode yang hanya mempunyai orde O(h).
Tingkat keakuratan hampiran sendiri didefinisikan sebagai berikut:
Definisi
Andaikan adalah fungsi bernilai riil yang didefinisikan pada kitar-δ
dengan pusat , ditulis sebagai , dengan .
Misal adalah fungsi yang didefinisikan dalam suatu domain
(daerah asal) yang memuat , maka
(i) , diartikan bahwa
terbatas. Jadi, terdapat bilangan dan , sehingga jika
, berakibat
(ii) , diartikan bahwa
M dalam definisi tersebut adalah suatu konstanta riil yang merupakan batas
dari xk menghampiri x(tk ).
Contoh:
Tunjukkan bahwa adalah .
Penyelesaian:
Akan ditentukan bilangan bulat positif dan sehingga untuk setiap ,
berlaku
Misal ambil , maka akan diperoleh
Dengan demikian, dari persamaan di atas diperoleh nilai dengan
.
C. METODE EULER
Metode Euler merupakan metode numerik paling sederhana yang
digunakan untuk menyelesaikan masalah nilai awal dengan bentuk
0 0 ) x t ( x )), t ( x , t ( f ) t ( '
x
(c.1)
pada interval
Penyusunan metode Euler dengan membagi interval dalam N subinterval
nh t
tn 0 untuk n0,1,2,...,N
dengan h adalah panjang langkah. Metode Euler diturunkan dari deret Taylor
pada x(th) yang dipotong sampai dengan suku kedua sebagai berikut:
) t ( R ) t ( hx ) t ( x ) h t (
x ' 1
(c.2)
dengan persamaan (d.1), maka persamaan (d.2) menjadi
) t ( R )) t ( x , t ( hf ) t ( x ) h t (
x 1
(c.3)
Kemudian saat t tn, maka persamaan (d.3) menjadi
) t ( R )) t ( x , t ( hf ) t ( x ) t (
x n1 n n n 1 n
1 N ,..., 2 , 1 , 0
n
Karena suku R1(tn) merupakan suku sisa (galat) dengan nilai yang
sangat kecil, maka suku tersebut dapat dibuang, sehingga dapat diperoleh untuk
bentuk umum metode Euler adalah
n n 1
n x hf
x untuk n0,1,2,...,N1
dengan xn1 merupakan pendekatan terhadap x(tn1),xn merupakan pendekatan
D. METODE RUNGA-KUTTA
Metode Runga-Kutta merupakan metode yang digunakan untuk
menyelesaikan masalah nilai awal. Misalkan diketahui:
0 0 ) y t ( y ), y , t ( f '
y (i)
pada interval t
tn,tn1
. Jika h adalah panjang langkah dan yn yang diketahui,maka y y n1 f(t,y)dt
n
t
t n 1
n
.
Untuk mendapatkan hasil pendekatan yang akurat, maka diperlukan
ukuran h yang sangat kecil. Oleh karena itu, penyelesaian masalah kontrol
optimal akan menggunakan metode Runga-Kutta 4, dengan tingkat keakuratannya
(galat) berorde 4 atau O(h4 ). Tingkat keakuratan tersebut sangat dipengaruhi
oleh panjang langkah yang diambil. Untuk memperolehnya dibutuhkan metode
Deret Taylor supaya penyelesaian hampirannya lebih akurat.
Metode Runga-Kutta merupakan penurunan metode Euler dengan
deret Taylor. Untuk metode Runga-Kutta orde 4, pada Deret Taylor dilakukan
pemotongan suku sampai suku ke keempat, yaitu
) h ( O ) t ( ' " y h 6 1 ) t ( " y h 2 1 ) t ( ' hy ) t ( y ) h t (
y 2 3 4
Secara umum, untuk skema numeris dari metode Runga-Kutta orde 4
dapat dituliskan sebagai berikut:
1 2 3 4
n 1
n K 2K 2K K
6 h y
dengan
) hK y , h t ( f K
) K 2 h y , 2 h t ( f K
) K 2 h y , 2 h t ( f K
) y , t ( f K
3 n n
4
2 n
n 3
1 n
n 2
n n 1
E. KESTABILAN PERSAMAAN DIFERENSIAL E.1. Pendahuluan
Dalam pembahasan mengenai kestabilan persamaan diferensial, akan
dimulai pembahasannya sebagai berikut.
Misalkan diberikan sistem persamaan diferensial yang sederhana,
yaitu
x A dt
x d
(e.1)
dengan A adalah matriks konstanta 2x2 dan x adalah vektor 2x1
yang bersesuaian dengan matriks A. Apabila sistem tersebut mempunyai
solusi penyelesaian rt e v
x dengan mensubstitusi x dalam persamaan (e.1),
maka dapat ditemukan persamaan
0 v ) rI A
( (e.2)
di mana radalah nilai eigen dan v adalah vektor eigen dari matriks
0 ) rI A
det( (e.3)
Sedangkan untuk vektor eigennya ditentukan dengan
mensubstitusikan nilai eigen yang didapat dari persamaan (e.3) ke dalam
persamaan (e.2). Penjelasan selanjutnya akan dibahas mengenai penyelesaian
umum persamaan diferensial dengan memperhatikan nilai eigen dan vektor
eigen yang sudah diperoleh tersebut.
E.2. Penyelesaian Umum Persamaan Diferensial
Nilai eigen yang dihasilkan tersebut di atas dibedakan dalam tiga
kasus, yaitu nilai eigen real beda, nilai eigen real sama, dan nilai eigen
kompleks. Penjelasan dari masing – masing nilai eigen tersebut adalah
1. Nilai Eigen Real Beda
Apabila r1 r2 ...rn, maka penyelesaian umumnya adalah
t r n n t
r 2 2 t r 1 1
n 2
1 c v e ... c v e
e v c
x (e.4)
2. Nilai Eigen Real Sama
Apabila r1 r2 ...rn, maka penyelesaian umunya adalah
t r 1 n n n t
r 2 3 3 t r 2 2 t r 1 1
n 3
2
1 c v te c v t e ... c v t e
e v c
x (e.5)
3. Nilai Eigen Kompleks
Apabila ada r1,r2,...,rn yang bernilai kompleks dan misalkan
t r n n t
r 3 3 2
1
n 3 ... c w e
e w c ) t ( v c ) t ( u c
x
dengan
) t
μ
sin b t
μ
cos a ( e ) t ( v
) t
μ
sin b t
μ
cos a ( e ) t ( u
t
λ
t
λ
E.3. Titik Kesetimbangan
Titik kesetimbangan adalah titik yang diperoleh ketika suatu sistem
berada pada keadaaan setimbang. Keadaan setimbang adalah keadaan di
mana perubahan suatu sistem sepanjang waktu adalah nol. Ada bermacam – macam tipe titik kesetimbangan, yaitu titik pelana (titik sadlle), nodal sink,
nodal source, spiral sink, spiral source, dan center. Sementara itu, titik
kesetimbangan tersebut diperoleh dengan membuat ruas kanan persamaan
(e.1) pada subbab sebelumnya sama dengan nol, yaitu Ax 0. Diasumsikan bahwa A adalah matriks tak singular atau det(A)0, sehingga titik
kesetimbangan pada persamaan (e.1) adalah x0.
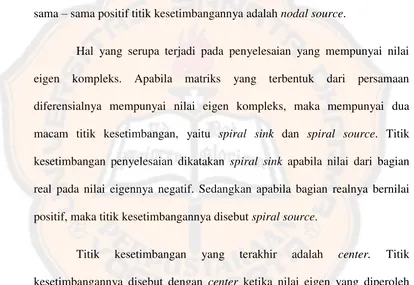
Titik kesetimbangan suatu sistem disebut dengan titik sadlle apabila
nilai eigen yang diperoleh bernilai real dan berbeda tanda. Misalkan
penyelesaian umum dari suatu persamaan diferensial tertentu adalah
t r 2 2 t r 1 1
2 1 c v e
e v c ) t (
x
mempunyai titik kesetimbangan x(t)0. Sehingga ketika c2 0 dan t
berarti bahwa penyelesaiannya akan menjauhi titik setimbangnya. Dengan
demikian, titik kesetimbangan penyelesaiannya disebut titik sadlle.
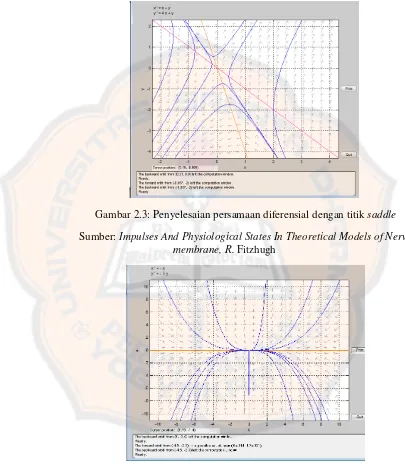
Untuk nilai eigennya real dengan tanda yang sama akan mempunyai
dua titik kesetimbangan, yaitu nodal sink dan nodal source. Titik
kesetimbangan penyelesaian dikatakan nodal sink ketika nilai eigen realnya
bernilai sama – sama negatif. Sedangkan untuk nilai eigen realnya bernilai sama – sama positif titik kesetimbangannya adalah nodal source.
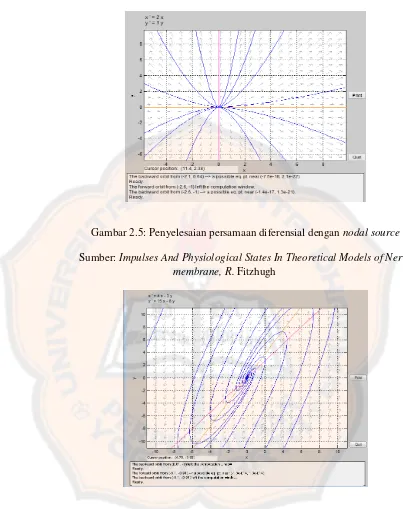
Hal yang serupa terjadi pada penyelesaian yang mempunyai nilai
eigen kompleks. Apabila matriks yang terbentuk dari persamaan
diferensialnya mempunyai nilai eigen kompleks, maka mempunyai dua
macam titik kesetimbangan, yaitu spiral sink dan spiral source. Titik
kesetimbangan penyelesaian dikatakan spiral sink apabila nilai dari bagian
real pada nilai eigennya negatif. Sedangkan apabila bagian realnya bernilai
positif, maka titik kesetimbangannya disebut spiral source.
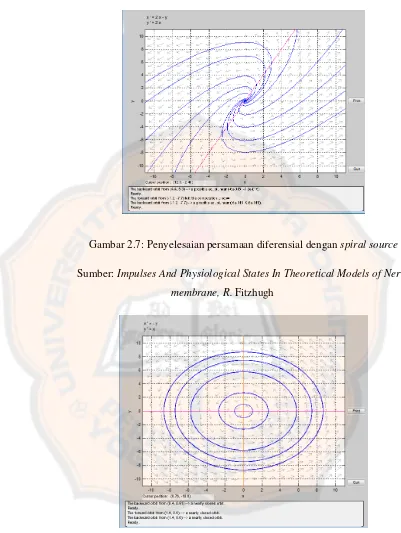
Titik kesetimbangan yang terakhir adalah center. Titik
kesetimbangannya disebut dengan center ketika nilai eigen yang diperoleh
adalah kompleks murni, yaitu nilai eigen dengan bagian imajiner saja.
Titik – titik kesetimbangan tersebut akan ditunjukkan dalam sebuah grafik pada bidang fase menggunakan program MATLAB. Bidang fase
sendiri merupakan suatu bidang xy dari suatu sistem persamaan diferensial
untuk sumbu horizontal adalah x(t) sedangkan untuk sumbu vertikal adalah
). t (
y Berikut adalah ilustrasi – ilustrasinya:
Gambar 2.3: Penyelesaian persamaan diferensial dengan titik saddle
Sumber: Impulses And Physiological States In Theoretical Models of Nerve membrane, R. Fitzhugh
Gambar 2.4: Penyelesaian persamaan diferensial dengan nodal sink
Gambar 2.5: Penyelesaian persamaan diferensial dengan nodal source
Sumber: Impulses And Physiological States In Theoretical Models of Nerve membrane, R. Fitzhugh
Gambar 2.6: Penyelesaian persamaan diferensial dengan spiral sink
Gambar 2.7: Penyelesaian persamaan diferensial dengan spiral source
Sumber: Impulses And Physiological States In Theoretical Models of Nerve
membrane, R. Fitzhugh
Gambar 2.8: Penyelesaian persamaan diferensial dengan center
Sumber: Impulses And Physiological States In Theoretical Models of Nerve
E.4. Kestabilan
Suatu sistem dapat dikatakan stabil apabila sistem tersebut diberi
gangguan maka tidak akan mengubah sistemnya dengan seiring waktu yang
semakin meningkat. Kestabilan tersebut diperoleh dengan memperhatikan
nilai eigen dari persamaan diferensial yang diberikan. Persamaan diferensial
tersebut harus diubah terlebih dahulu ke dalam bentuk persamaan matriks
agar dapat ditemukan nilai eigennya, seperti persamaan (e.3) pada subbab
sebelumnya.
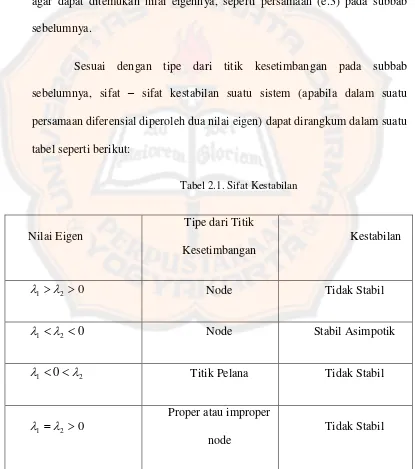
Sesuai dengan tipe dari titik kesetimbangan pada subbab
sebelumnya, sifat – sifat kestabilan suatu sistem (apabila dalam suatu persamaan diferensial diperoleh dua nilai eigen) dapat dirangkum dalam suatu
tabel seperti berikut:
Tabel 2.1. Sifat Kestabilan
Nilai Eigen
Tipe dari Titik
Kesetimbangan
Kestabilan
0
2
1
Node Tidak Stabil
0
2
1
Node Stabil Asimpotik
2
1 0
Titik Pelana Tidak Stabil
0
2
1
Proper atau improper
node
0
2
1
Proper atau improper
node
Stabil Asimpotik
1, 2 i
Titik Spiral Tidak Stabil
Stabil Asimtotik 0
0
μ λ
,
μ λ
i
μ λ
r , r
2 1
2 1
Center Stabil
Demikian dasar – dasar yang digunakan dalam pembahasan pada bab
31 BAB III
PRINSIP MAKSIMUM PONTRYAGIN
A. Kontrol Optimal
Kontrol optimal merupakan suatu model optimisasi yang digunakan
untuk mengoptimalkan suatu fungsi linear maupun nonlinear yang terbatas
oleh kendala-kendala berupa persamaan dan pertidaksamaan. Fungsi yang akan
dioptimalkan disebut dengan fungsi obyektif. Fungsi obyektif yang
dioptimalkan terdiri dari fungsi kontrol (u(t)) dan fungsi keadaan (x(t))yang
keduanya bergantung dengan waktu (t). Sifat waktu dalam masalah kontrol
optimal adalah kontinu dan diskret. Namun, dalam tulisan ini sifat waktu
kontrol optimalnya adalah kontinu. Fungsi kontrol sangat berperan untuk
mengoptimalkan suatu permasalahan. Penyelesaian optimalnya terletak pada
nilai yang optimal (terbaik) untuk kontrol (u*(t)) dan keadaannya (x*(t)).
Kontrol optimal dituangkan secara matematik dalam persamaan diferensial
biasa.
Secara umum, masalah kontrol optimal dapat dirumuskan sebagai
berikut (Suzanne Lenhart dan John T. Workman: 2007, 7):
yang mengoptimalkan (memaksimumkan atau meminimalkan):
, dt )) t ( u ), t ( x , t ( f min atau dt
)) t ( u ), t ( x , t ( f
max 1
0 1
0
t
t u t
t
u
(3.1)dengan kendala:
bebas )
t ( x dan x
) t ( x
)) t ( u ), t ( x , t ( g ) t ( ' x
1 0
0
(3.2)
Persamaan (3.1) menunjukkan fungsi obyektif, sedangkan persamaan
(3.2) menunjukkan fungsi kendalanya. Apabila fungsi kontrol diubah, maka
penyelesaian untuk persamaan differensial pada fungsi kendalanya juga akan
berubah. Hal ini menggambarkan bahwa terdapat hubungan antara kontrol dan
keadaannya (x(t)), yaitu sebagai pemetaan u(t)xx(u). Fungsi kendala
yang memenuhi persamaan differensial bergantung pada variabel kontrol dan
terdifferensial sepotong-sepotong. Seperti yang sudah dijelaskan sebelumnya,
variabel kontrol u(t) bersifat kontinu sepotong-sepotong. Oleh karena itu,
fungsi obyektif dan fungsi kendala akan selalu fungsi yang terdiferensial secara
kontinu.
B. Contoh-Contoh Kontrol Optimal
Untuk memahami lebih lanjut tentang kontrol optimal, berikut akan
diberikan contoh-contohnya dalam kehidupan sehari-hari. Contoh-contohnya
adalah sebagai berikut:
1. Lintasan Roket (David Burghes, 2004, 197; 203)
Sebuah roket meluncurkan satelit ke orbit sekitar bumi. Dalam hal ini
konsumsi bahan bakar. Variabel kontrolnya memilih sudut gaya dorong (Φ)
dan laju pancaran gas (β). Sudut gaya dorong merupakan sudut yang terbentuk antara poros roket dengan garis horisontalnya (dasar tanah). Kontrol
dalam masalah ini adalah untuk mempengaruhi perpindahannya, sehingga
dapat dibentuk persamaan gerak roketnya:
ext F mF dt dv
m (3.3)
dengan m= massa roket
v = kecepatan roket
F= gaya dorong
Fext= gaya luar
Gaya dorong roket dirumuskan dengan:
β m
c
F (3.4)
dengan c= kecepatan pembuangan gas
β= laju pembakaran
Persamaan (3.3) kedua ruas dibagi dengan m menjadi
m F F dt dv F
mF dt dv
m ext
ext
(3.5)
Kemudian gaya dorong pada persamaan (3.4) disubstitusikan ke
m F m
β
c dt dv m
F F dt
dv ext ext
(3.6)
Peluncuran roket dengan sudut gaya dorong (Φ), v (v1,v2 ) dan
) mg , 0 (
Fext dapat digambarkan sebagai berikut:
Gambar 3.1: Peluncuran Roket
Sumber: Control And Optimal Control Theories With Applications, D.
Burghes & Alexander Graham
Diketahui sudut gaya dorong (Φ)dan gaya dorong roket pada persamaan (3.4), maka persamaan perpindahan roket menjadi dua persamaan.
Kedua persamaan tersebut diturunkan dari sumbu horisontal (x) dan sumbu
vertikal (y) sebagai berikut:
Φ
cos m
β
c dt dv1
(3.7i)
g
Φ
sin m
β
c dt dv2
Persamaan (3.7.i) merupakan persamaan yang bersesuaian dengan
sumbu horizontal, sedangkan persamaan (3.7.ii) adalah persamaan yang
bersesuaian dengan sumbu vertikal. Persamaan (3.7.ii) dipengaruhi oleh gaya
gravitasi bumi, sehingga terdapat pengurangan g.
Uraian di atas membawa permasalahan tersebut untuk dituangkan
dalam rumusan masalah kontrol optimal sebagai berikut:
Fungsi obyektif:
T0 β dt
min J
dengan kendala:
g Φ sin m
β c dt dv
Φ cos m
β c dt dv
2 1
2. Produksi Barang (Suresh P. Sethi & Gerald L. Thompson, 2000, 4)
Dalam suatu proses produksi baja, akan diambil untuk masalah
kontrol optimalnya adalah meminimalkan jumlah biaya penyimpanan dan
produksi. Dalam hal ini, meminimalkan jumlah biaya penyimpanan dan
produksi dapat dihitung dengan memaksimalkan negatif dari jumlahan kedua
biayanya dalam interval waktu
0,T . Untuk variabel kontrolnya sendiri adalahlaju produksinya P(t). Dalam masalah ini ada permintaan S(t). Oleh karena
dalam proses produksi juga memperhatikan penyimpanannya, maka variabel
keadaannya adalah banyaknya penyimpanan I(t), yaitu banyaknya ton baja
) t ( S ) t ( P ) t ( I
.
Persamaan tersebut menjelaskan bahwa persediaan baja berubah dari
waktu ke waktu. Agar permintaan selalu dipenuhi, maka tidak diizinkan
backlogging yaitu selalu ada persediaan, sehingga I(t)0. Sedangkan untuk
tingkat produksi diberikan batasannya antara batas bawah Pmin dan batas atas
max
P . Misalkan biaya penyimpanan persediaan baja h(t) dan biaya produksi
baja yaitu c(P), maka uraian di atas dapat dituangkan ke dalam masalah
kontrol optimal sebagai berikut
Fungsi obyektif:
T
0
P h(I(t)) c(P(t)) max
J
dengan kendala
min
max min
.
I ) T ( I
0 ) t ( I
P ) t ( P P 0
) t ( S ) t ( P ) t ( I
C. Syarat Perlu Optimalitas
Misalkan menyelesaikan masalah kontrol optimal untuk kasus
memaksimalkan J(u). Diberikan suatu grafik kontrol optimal u* dan keadaan
*
Gambar 3.2: Grafik kontrol optimal
Sumber: Optimal Control Applied To Biological Models, S. Lenhart & John T.
Workman
Diasumsikan terdapat suatu kontrol optimal yang fungsinya kontinu
sepotong-sepotong dengan u* sebagai kontrolnya dan x* fungsi keadaan. Oleh
karena itu J(u)J(u*) untuk semua kontrol u. Misalkan terdapat pula
suatu fungsi variasi h(t)yang kontinu sepotong-sepotong dan suatu konstanta
. R
ε Maka, penjumlahan dari fungsi u*(t) dan perkalian antara konstanta
εdengan fungsi h(t) juga suatu fungsi kontrol yang kontinu sepotong-sepotong,
) t ( h ε ) t ( * u ) t (
uε . Dimisalkan xε keadaan yang terkait dengan kontrol uε, maka xε memenuhi persamaan differensial sebagai berikut:
)) t ( u ), t ( x , t ( g ) t ( x dt
d ε ε ε
Seperti yang terlihat dari grafik di atas bahwa jika semua lintasan
Misalkan diberikan fungsi obyektif di uε:
akan ditentukan menggunakan Teorema Fundamental Kalkulus,maka:
λ(t)x (t)
dt λ(t )x (t ) λ(t )x (t )Dengan menambahkan persamaan (3.10) dan persamaan (3.9) maka:
Menggunakan aturan perkalian pada turunan dan persamaan (3.8): menggunakan limit sebagai berikut:
ε menjadi
0 persamaan integral yang terakhir, maka dapat diperoleh:
Menerapkan aturan rantai ke fungsi f dan g, diperoleh:
Untuk menyederhanakan persamaan (3.12), dengan menghilangkan koefisien dari
0
maka dipilih fungsi tambahan λ(t)untuk memenuhi
kondisi batas
)
Sehingga, penyederhanaan dari persamaan (3.12) menjadi:
sepotong, maka berlaku pula untuk
))
Sehingga menghasilkan
yang mengakibatkan diperolehnya kondisi optimalitasnya
f 0
u
u(t,x*(t),u*(t)) λ(t)g (t,x*(t),u*(t)) 0 untuk semuat t t
f
Persamaan tersebut membentuk syarat perlu yang dibutuhkan kontrol
optimal. Syarat perlu yang dibutuhkan kontrol optimal dapat diperoleh dari
persamaan Hamilton H yang didefinisikan sebagai berikut
) dan λ kontinu, sedangkan u kontinu sepotong-sepotong. Dengan
memaksimalkan H yang sehubungan dengan u di u*, kondisi-kondisi kontrol
Kondisi optimalitas:
Persamaan tambahan:
)
Kondisi transversal:
0 ) t (
λ 1
Dan diberikan persamaan keadaan
0
Teorema 3.1
Andaikan bahwa f(t,x,u) dan g(t,x,u) yang keduanya fungsi yang
terdifferensial secara kontinu dalam t,x,u dan cekung di u. Misalkan u* kontrol
optimal untuk masalah (3.1) dan (3.2), dengan keadaan x*, dan λ adalah fungsi
Bukti:
H merupakan turunan persamaan Hamilton terhadap u seperti pada pembahasan
sebelumnya. Persamaan terakhir tersebut diperoleh berdasarkan teorema 2.1.
Karena H(t,x,u,λ) f(t,x,u)λg(t,x,u) maka
Persamaan terakhir menjadi
)
singgung, yaitu “Jika k adalah fungsi cekung dan terdifferensialkan, maka fungsi
Teorema tersebut berlaku untuk masalah memaksimalkan fungsi
obyektif. Akan tetapi, teorema tersebut juga berlaku untuk masalah
meminimalkan fungsi obyektif. Namun, perbedaannya terletak pada ketaksamaan
Hamiltonnya, yaitu
)) t ( λ ), t ( * u ), t ( * x , t ( H )) t ( λ ), t ( u ), t ( * x , t (
H
Jika penyelesaian yang diperoleh dari perhitungan fungsi obyektif
menghasilkan nilai atau -, maka dikatakan bahwa masalah tersebut tidak
mempunyai penyelesaian. Berikut diberikan teorema yang menyatakan
ketunggalan dari penyelesaian masalah kontrol optimal.
Teorema 3.2
Diketahui
10
t
t f(t,x(t),u(t))dt )
u ( J
dengan kendala x'(t) g(t,x(t),u(t)), x(t0) x0
Andaikan bahwa f(t,x(t),u(t))dan g(t,x(t),u(t)) keduanya fungsi
yang terdifferensial secara kontinu dalam t,x,u dan cekung di x dan u.
Andaikan u* adalah kontrolnya, dengan keadaannya x*, dan λ fungsi yang
terdifferensial sepotong-sepotong, sedemikian sehingga u*, x*, dan λ terletak
pada interval t0 t t1:
. 0 ) t (
λ
, 0 ) t (
λ
), g
λ
f ( '
λ
, 0 g
λ
f
1
x x u u
Maka untuk semua kontrol u
) u ( J *) u (
Bukti:
Menggunakan teorema 2.1 pada bab sebelumnya, hal tersebut memberikan
dt
Substitusikan
*)
Ke persamaan (3.13), sehingga diperoleh
Sehingga untuk perhitungan terakhir diperoleh sebagai berikut
dt
Hasil yang terpenting dalam kontrol optimal adalah prinsip
Teorema 3.3
Andaikan u* adalah kontrol optimal, dan menghasilkan keadaan x*,
untuk masalah
1
0
t
t u
u J(u) max f(t,x(t),u(t))dt max
dengan kendala
. x ) t ( x )), t ( u ), t ( x , t ( g ) t ( '
x 0 0 (3.14)
Misalkan
^
t adalah titik tetap sedemikian sehingga t t t1. ^
0 Maka,
fungsi-fungsi terbatas
1 ^
t , t * ^
*
u
u ,
1 ^
t , t * ^
*
x
x , bentuk pasangan optimal untuk
masalah
1
0
t
t u ^
u J(u) max f(t,x(t),u(t))dt
max
dengan kendala
). t ( x ) t ( x )), t ( u ), t ( x , t ( g ) t ( ' x
^ * ^
(3.15)
Jika u* kontrol optimal tunggal untuk (3.14), maka
^ *
u kontrol
optimal tunggal untuk (3.15).
Bukti:
Diketahui bahwa u* kontrol optimal tunggal untuk (3.14). Akan dibuktikan
bahwa
^ *