viii
INTISARI
Pada saat ini motor induksi 3 fasa sangat dibutuhkan pada daerah yang banyak terdapat industri kecil dan pada daerah yang hanya mempunyai sistem kelistrikan 1 fasa. Daerah tersebut memerlukan motor dengan daya penggerak yang besar tetapi yang bisa dioperasikan dengan baik dan normal pada sistem kelistrikan 1 fasa. Salah satu cara agar motor induksi dapat bekerja dengan baik dan normal adalah menambahkan rangkaian motor kapasitor pada motor induksi 3 fasa. Rangkaian kapasitor yang digunakan diletakkan pada sisi kumparan bantu atau sisi kumparan yang mempunyai impedansi yang lebih besar.
Pada penelitian ini, untuk menunjang kinerja motor induksi 3 fasa dengan sistem kelistrikan 1 fasa ditambah dengan sensor arus ACS758 untuk mengukur nilai arus dari beban yang digunakan. Ketika sensor arus ACS758 mendeteksi adanya arus yang lewat, maka akan ditampilkan nilai arus tersebut pada LCD yang tersedia untuk memudahkan user dalam pembacaan nilai arus yang terukur. Motor induksi dapat bekerja dengan baik dan normal dengan sistem kelistrikan 1 fasa menggunakan rangkaian motor kapasitor. Pengukuran dengan sensor arus tersebut memiliki error dibawah 3%.
ix
ABSTRACT
At this time the 3-phase induction motors are needed in many areas there are small industries and in areas that have only 1-phase electrical system. The area requires a motor with a large driving force but that can be operated with both normal and 1-phase electrical system. One way for an induction motor can work with both normal and is adding a series capacitor motors in 3-phase induction motor. The series capacitors are used auxiliary coil is placed on the side or sides of the coil which has a larger impedance.
In this study, to support the performance of 3-phase induction motors with 1-phase electrical system coupled with the ACS758 current sensor to measure the current value of the load is used. When the ACS758 current sensor detects current passes, it will display the current value on the LCD are available to facilitate the user in the current value of the measured reading. Induction motor can work well and normal with 1-phase electrical system using a series capacitor motors. Measurement with current sensor has an error less than 3%.
TUGAS AKHIR
SENGOSERASIAN MOTOR INDUKSI 3 FASA
MENGGUNAKAN SISTEM TENAGA 1 FASA
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Srogram Studi Teknik Elektro
Oleh:
SECOND ADRIAN CHRISTIANTO NIM : 085114002
SROGRAM STUDI TEKNIK ELEKTRO FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA YOGYAKARTA
FINAL PROJECT
OPERATION OF 3 PHASE INDUCTION MOTOR
USING 1 PHASE POWER SYSTEM
Presented as Partial Fullfillment of Requirements To Obtain the SarjanaTeknik Degree In Electrical Engineering Study Program
Second Adrian Christianto NIM : 085114002
ELECTRICAL ENGINEERING STUDY PROGRAM SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY YOGYAKARTA
vi
HALAMAN MOTTO HIDUP DAN PERSEMBAHAN
MOTTO
Segala sesuatu dapat terwujud jika kamu benar-benar
menginginkannya
Skripsi ini kupersembahkan untuk,
Tuhan Yesus Kristus yang selalu mendampingi dan menyertaiku,
Alm. Ayahanda yang tercinta, FA. Tedjo Yuwana
Ibunda yang tercinta, F. Tridayanti Wahyu Wardani
Kakakku yang tersayang, Sesilia Firsty Novi Andria Sari
viii
INTISARI
Pada saat ini motor induksi 3 fasa sangat dibutuhkan pada daerah yang banyak terdapat industri kecil dan pada daerah yang hanya mempunyai sistem kelistrikan 1 fasa. Daerah tersebut memerlukan motor dengan daya penggerak yang besar tetapi yang bisa dioperasikan dengan baik dan normal pada sistem kelistrikan 1 fasa. Salah satu cara agar motor induksi dapat bekerja dengan baik dan normal adalah menambahkan rangkaian motor kapasitor pada motor induksi 3 fasa. Rangkaian kapasitor yang digunakan diletakkan pada sisi kumparan bantu atau sisi kumparan yang mempunyai impedansi yang lebih besar. Pada penelitian ini, untuk menunjang kinerja motor induksi 3 fasa dengan sistem kelistrikan 1 fasa ditambah dengan sensor arus ACS758 untuk mengukur nilai arus dari beban yang digunakan. Ketika sensor arus ACS758 mendeteksi adanya arus yang lewat, maka akan ditampilkan nilai arus tersebut pada LCD yang tersedia untuk memudahkan user dalam pembacaan nilai arus yang terukur. Motor induksi dapat bekerja dengan baik dan normal dengan sistem kelistrikan 1 fasa menggunakan rangkaian motor kapasitor. Pengukuran dengan sensor arus tersebut memiliki errsr dibawah 3%.
ix
ABSTRACT
At this time the 3-phase induction motors are needed in many areas there are small industries and in areas that have only 1-phase electrical system. The area requires a motor with a large driving force but that can be operated with both normal and 1-phase electrical system. One way for an induction motor can work with both normal and is adding a series capacitor motors in 3-phase induction motor. The series capacitors are used auxiliary coil is placed on the side or sides of the coil which has a larger impedance.
In this study, to support the performance of 3-phase induction motors with 1-phase electrical system coupled with the ACS758 current sensor to measure the current value of the load is used. When the ACS758 current sensor detects current passes, it will display the current value on the LCD are available to facilitate the user in the current value of the measured reading. Induction motor can work well and normal with 1-phase electrical system using a series capacitor motors. Measurement with current sensor has an error less than 3%.
x
KATA PENGANTAR
Puji dan Syukur penulis panjatkan kepada Tuhan Yesus Kristus karena telah memberikan berkat-Nya sehingga penulis dapat menyelesaikan laporan akhir ini dengan baik. Laporan akhir ini disusun untuk memenuhi syarat memperoleh gelar sarjana.
Penulis mengucapkan terima kasih kepada :
1. Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta. 2. Ketua Program Studi Teknik Elektro Universitas Sanata Dharma Yogyakarta. 3. Petrus Setyo Prabowo , S.T., M.T., dosen pembimbing yang dengan penuh
pengertian dan ketulusan hati memberi bimbingan, kritik, saran, serta motivasi dalam penulisan skripsi ini.
4. Para dosen penguji yang telah memberikan masukan, bimbingan, saran dalam merevisi skripsi ini.
5. Orang tua dan kakak saya atas dukungan, doa, cinta, perhatian, kasih sayang yang tiada henti.
6. Pradipta Melanie R. atas dukungan, doa, cinta, perhatian, kasih sayang yang tiada henti.
7. Staff sekretariat Teknik Elektro, atas bantuan dalam melayani mahasiswa.
8. Kawan-kawan seperjuangan angkatan 2008 Teknik Elektro, kawan-kawan kost, dan semua kawan yang mendukung saya dalam menyelesaikan tugas akhir ini.
9. Semua pihak yang tidak dapat disebutkan satu persatu atas semua dukungan yang telah diberikan dalam penyelesaian skripsi ini.
Penulis menyadari bahwa dalam penyusunan laporan akhir ini masih mengalami kesulitan dan tidak lepas dari kesalahan. Oleh karena itu, penulis mengharapkan masukan, kritik dan saran yang membangun agar skripsi ini menjadi lebih baik. Dan semoga skripsi ini dapat bermanfaat sebagaimana mestinya.
Penulis
xi
DAFTAR ISI
TALAMAN JUDUL ... i
TALAMAN JUDUL (Bahasa Inggris) ... ii
TALAMAN PERSETUJUAN ... iii
TALAMAN PENGESATAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
TALAMAN PERSEMBATAN DAN MOTTO TIDUP ... vi
LEMBAR PERNYATAAN PERSETUJAN KARYA ILMIAT UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xi
DAFTAR GAMBAR ... xiv
DAFTAR TABEL ... xvi
DAFTAR LAMPIRAN... xvii
BAB I PENDATULUAN 1.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat Penelitian ... 1
1.3. Pembatasan Masalah ... 1
1.4. Metodogi Penelitian ... 2
BAB II DASAR TEORI 2.1. Motor Induksi 3 Fasa ... 4
2.1.1 Konstruksi Motor Induksi 3 Fasa ... 4
2.1.2 Motor Kapasitor ... 5
2.2. Teori Tenaga Listrik 1 Fasa ke Motor Induksi 3 Fasa ... 7
2.3. Kapasitor ... 7
2.4. Generator Sinkron... 8
2.5. Mikrokontroler AVR ... 10
2.5.1. Konstruksi ATMega8535 ... 10
xii
2.5.3. ADC (Analog to Digital Converter) ... 13
2.5.3.1. Mode Operasi ... 14
2.5.3.2. Register Pengendali ADC ... 14
2.6. Sensor Arus ACS758 ... 17
2.7. IC Regulator ... 19
2.8. Filter Kapasitor... 20
2.9. Hukum Ohm ... 20
2.10. LCD ... 21
BAB III PERANCANGAN 3.1. Blok Diagram Rangkaian ... 25
3.2. Perancangan Perangkat Keras ... 26
3.2.1. Perancangan Rangkaian Sensor Arus ... 26
3.2.2. Perancangan Rangkaian Mikrokontroler ... 27
3.2.3. Reset Eksternal ... 28
3.2.4. Osilator ... 28
3.2.5. Kapasitor ... 28
3.2.6. Perancangan Rangkaian Penampil... 29
3.2.6.1. Rangkaian Indikator LED ... 29
3.2.6.2. Rangkaian LCD ... 30
3.2.7. Rangkaian Lengkap Mikrokontroler ... 31
3.2.8. Perancangan Rangkaian Penyearah ... 31
3.3. Perangcangan Perangkat Lunak ... 35
3.3.1. Flowchart ... 35
BAB IV TASIL DAN PEMBATASAN 4.1. Bentuk Fisik Rangkaian Perangkat Keras Elektronik ... 36
4.1.1. Bentuk Fisik Rangkaian Kapasitor ... 36
4.1.2. Cara Penggunaan Alat ... 37
4.1.3. Perangkat Keras Elektronik ... 38
4.2. Hasil Pengujian ... 41
4.2.1. Pengujian Pada Sistem 1 Fasa ... 42
4.2.2. Pengujian Pada Sistem 3 Fasa ... 45
4.2.3. Pengujian Pada Sistem 1 Fasa dengan Variasi Kapasitor... 48
xiii
4.2.3.2. Variasi Kapasitor Jalan Bernilai 16 µF ... 48
4.2.3.3. Variasi Kapasitor Start Bernilai 44 µF ... 49
4.2.3.4. Analisa Data Arus Alternator dengan Variasi Kapasitor ... 50
4.3. Analisis Hasil Pengujian ... 50
4.3.1. Analisis Data Arus ... 50
4.3.2. Analisis Data Kecepatan Putaran (RPM) ... 52
4.4. Analisis Error Perangkat Keras ... 54
4.5. Pengujian Rangkaian Penyearah ... 56
4.6. Pembahasan Software ... 58
4.6.1. Program Utama ... 58
4.6.2. Program Mengukur Nilai Arus ... 59
BAB V KESIMPULAN DAN SARAN 5.1. Kesimpulan ... 61
5.2. Saran ... 61
xiv
DAFTAR GAMBAR
Gambar 1.1. Blok model perancangan sistem 1 fasa ... 2
Gambar 1.2. Blok model perancangan sistem 3 fasa ... 3
Gambar 2.1. Stator ... 5
Gambar 2.2. Rotor ... 5
Gambar 2.3. Skema rangkaian motor kapasitor start ... 5
Gambar 2.4. Skema rangkaian motor kapasitor start dan run ... 6
Gambar 2.5. Skema rangkaian motor kapasitor permanen ... 6
Gambar 2.6. Rangkaian kapasitor pada kumparan motor induksi 3 fasa ... 7
Gambar 2.7. Alternator ... 9
Gambar 2.8. Komponen utama alternator ... 9
Gambar 2.9. Konfigurasi pin ATmega8535 ... 11
Gambar 2.10. Rangkaian reset ... 13
Gambar 2.11. Sensor arus ACS758 ... 18
Gambar 2.12. Port masukan dan Port keluaran ACS758 ... 18
Gambar 2.13. Rangkaian dasar regulator 78xx ... 19
Gambar 2.14. Rangkaian arus ... 20
Gambar 2.15. Bentuk fisik LCD 16x2 ... 21
Gambar 2.16. Konfugurasi pin LCD ... 22
Gambar 3.1. Diagram blok rancangan ... 25
Gambar 3.2. Rangkaian sensor arus ACS758 ... 26
Gambar 3.3. Rangkaian mikrokontroler ... 27
Gambar 3.4. Rangkaian reset eksternal ... 28
Gambar 3.5. Rangkaian osilator ... 28
Gambar 3.6. Penempatan dan nilai kapasitor yang digunakan ... 29
Gambar 3.7. Rangkaian LED ... 30
Gambar 3.8. Rangkaian LCD ... 30
Gambar 3.9. Rangkaian lengkap mikrokontroler ... 31
Gambar 3.10 (a). Rangkaian penyearah tegangan 12 volt ... 32
Gambar 3.10 (b). Rangkaian penyearah tegangan 5 volt ... 32
xv
Gambar 4.1. Bentuk fisik rangkaian kapasitor ... 36
Gambar 4.2. Boks peragkat keras elektronik ... 37
Gambar 4.3. Penempatan rangkaian kapasitor pada motor induksi 3 fasa ... 37
Gambar 4.4. Perangkat keras elektronik ... 39
Gambar 4.5. Rangkaian lampu pijar ... 39
Gambar 4.6. Rangkaian LCD ... 40
Gambar 4.7. Sensor arus ... 40
Gambar 4.8. Rangkaian minimum system ... 40
Gambar 4.9. Rangkaian penyearah tegangan ... 41
Gambar 4.10. Rangkaian catu daya ... 41
Gambar 4.11. Grafik hubungan antara arus terhadap beban lampu pada sistem 1 fasa... 43
Gambar 4.12. Grafik hubungan antara RPM terhadap beban lampu pada sistem 1 fasa ... 43
Gambar 4.13. Grafik hubungan antara arus terhadap beban lampu pada sistem 3 fasa... 46
Gambar 4.14. Grafik hubungan antara RPM dengan beban lampu pada sistem 3 fasa ... 46
Gambar 4.15. Grafik perbandingan arus keluaran alternator menggunakan variasi kapasitor ... 50
Gambar 4.16. Grafik perbandingan arus antara sistem 1 fasa dengan sistem 3 fasa ... 51
Gambar 4.17. Grafik perbandingan RPM pada sistem 1 fasa dengan sistem 3 fasa ... 53
Gambar 4.18. Rangkaian penyearah tegangan ... 56
Gambar 4.19. Tampilan awal LCD pada perangkat keras ... 58
Gambar 4.20. Listing program utama dan program tampilan awal ... 58
Gambar 4.21. Listing program mengukur nilai arus ... 59
Gambar 4.22. Tampilan nilai tegangan keluaran sensor dan nilai arus ... 60
xvi
DAFTAR TABEL
Tabel 2.1.
Fungsi khusus
popt
B ... 11
Tabel 2.2.
Fungsi khusus
popt
C ... 12
Tabel 2.3.
Fungsi khusus
popt
D ... 12
Tabel 2.4.
Register ADMUX ... 14
Tabel 2.5.
Pemilihan
tegangan referensi... 15
Tabel 2.6.
Pemilih
pin
masukan ADC ... 15
Tabel 2.7.
Register ADCSRA ... 15
Tabel 2.8.
ADC
ppescalep
... 16
Tabel 2.9.
Register Data ADC, ADLAR=0 ... 17
Tabel 2.10.
Register Data ADC, ADLAR=1 ... 17
Tabel 2.11.
Nilai tegangan IC 78xx ... 19
Tabel 2.12.
Operasi dasar LCD ... 22
Tabel 2.13.
Konfigurasi
pin
LCD ... 22
Tabel 2.14.
Konfigurasi
pin
LCD ... 23
Tabel 3.1.
Tegangan keluaran sensor terhadap arus yang diukur ... 27
Tabel 4.1.
Hasil pengujian pada sistem 1 fasa ... 42
Tabel 4.2.
Penambahan parameter uji pada sistem 1 fasa ... 44
Tabel 4.3.
Hasi pengujian pada sistem 3 fasa ... 45
Tabel 4.4.
Penambahan parameter uji pada sistem 3 fasa ... 47
Tabel 4.5.
Pengujian kapasitor jalan 10 µF ... 48
Tabel 4.6.
Pengujian kapasitor jalan 16 µF ... 49
Tabel 4.7.
Pengujian kapasitor start 44 µF ... 49
Tabel 4.8.
Nilai arus sistem 1 fasa dan sistem 3 fasa ... 51
Tabel 4.9.
Nilai RPM motor induksi sistem 1 fasa dan sistem 3 fasa ... 52
Tabel 4.10.
Presentase
eppop
perangkat keras dalam pengukuran nilai arus ... 55
xvii
DAFTAR LAMPIRAN
1
BABBIB
PENDAHULUANB
B
1.1BB LatarBBelakangB
Pada saat ini pengoperasian motor induksi 3 fasa pada sistem tenaga listrik AC 1 fasa sangat dibutuhkan terlebih pada daerah yang banyak terdapat industri kecil dan pada daerah tertentu yang hanya mempunyai sistem tenaga listrik 1 fasa, sedangkan mereka membutuhkan motor penggerak dengan daya yang besar (motor induksi 3 fasa) yang secara normal harus dioperasikan pada sistem tenaga listrik 1 fasa[1,2]. Salah satu cara agar motor induksi 3 fasa dapat digunakan dengan baik pada kondisi ini adalah dengan mengoperasikan motor induksi 3 fasa pada sistem tenaga listrik 1 fasa dengan menggunakan kapasitor[1,3].
Dalam sistem pengoperasian motor induksi 3 fasa, kapasitor diletakkan pada sisi kumparan bantu (impedansi lebih besar) atau pada sisi kumparan utama (impedansi lebih) asal kapasitor yang digunakan dapat menggerakkan motor[4]. Berdasarkan kondisi ini, maka penelitian ini dimaksudkan untuk merancang metode dalam mengoperasikan motor induksi 3 fasa pada sistem tenaga listrik 1 fasa dengan cara menempatkan kapasitor pada sisi kumparan dengan impedansi yang lebih besar (kumparan bantu). Secara umum, untuk mengoperasian motor induksi 3 fasa pada sistem tenaga listrik 1 fasa dengan menggunakan kapasitor dapat dilakukan dengan cara mengubah bentuk rangkaian kumparan motor induksi 3 fasa menjadi seperti rangkaian motor induksi 1 fasa jenis motor kapasitor.
1.2B TujuanBdanBManfaatBPenelitianB
Tujuan yang hendak dicapai adalah membuktikan salah satu kegunaan dari pengoperasian motor kapasitor. Manfaat yang akan dicapai adalah mampu mengoperasikan motor induksi 3 fasa secara normal pada sistem tenaga listrik 1 fasa.
1.3B BatasanBMasalahB
a. Menggunakan motor induksi 3 fasa 1,5kW, 220/380V; 50Hz; 6,2/3,6A; 1400 rpm dengan faktor daya 0,84 tertinggal.
b. Penggunaan kapasitor yang sesuai dengan kebutuhan melalui proses perancangan.
c. Menggunakan generator sinkron 1 fasa dengan spesifikasi ALTERNATOR, 12V, RECONDITIONED by SWIP.
d. Menggunakan beban (lampu pijar) tidak lebih daripada 540 Watt. e. Menggunakan ACS758 sebagai sensor arus.
f. Menggunakan Mikrokontroler AVR ATMega 8535 sebagai pengolah data dari keluaran motor induksi 3 fasa yang telah diberi tambahan kapasitor.
1.4B MetodologiBPenelitianB
Penulisan ini menggunakan metode :
a. Pengumpulan referensi berupa website, buku-buku, dan jurnal-jurnal.
b. Perancangan dan pembuatan subsistem berupa perangkat keras dan perangkat lunak. Pada tahap ini bertujuan mencari nilai-nilai yang optimal dari sistem yang akan dibuat dengan mempertimbangkan dari berbagai faktor-faktor permasalahan dan kebutuhan yang telah ditentukan. Pada gambar 1.1 sistem bekerja ketika motor induksi 3 fasa yang telah dipasang kapasitor pada kumparan bantu, diberi masukkan sistem tenaga listrik 1 fasa. Kemudian sensor akan mendeteksi besarnya arus pada beban yang digunakan. Selanjutnya data-data arus yang telah didapatkan tersebut oleh mikrokontroler akan ditampilkan pada LCD untuk interface-nya.
Gambar 1.1 Blok model perancangan sistem 1 fasa Tenaga Listrik 1 fasa Motor Induksi 3 fasa Generator
Sinkron 1 fasa Sensor Arus
Mikrokontroler Penampil
Beban (lampu
c. Pengujian dan pengambilan data. Pengujian dalam penelitian ini yaitu mengoperasikan motor induksi 3 fasa pada sistem tenaga listrik 1 fasa dengan meletakkan kapasitor jalan pada sisi kumparan dengan impedansi yang lebih besar (kumparan bantu). Setelah itu dibandingkan dengan kinerja motor saat beroperasi normal pada sistem tenaga listrik 3 fasa (gambar 1.2). Untuk teknik pengambilan data dilakukan dengan cara mengubah-ubah beban yang digunakan (lampu pijar). Setelah itu, dilakukan pengukuran nilai arus, tegangan, kecepatan putaran motor induksi (RPM) dan daya pada beban.
Gambar 1.2 Blok model perancangan sistem 3 fasa
d. Analisa dan penyimpulan hasil percobaan. Analisa data dilakukan dengan membandingkan data hasil percobaan antara pengoperasian motor induksi 3 fasa menggunakan sistem 1 fasa dengan pengoperasian motor induksi 3 fasa menggunakan sistem 3 fasa (normal). Penyimpulan hasil percobaan dapat dilakukan dengan menghitung presentase error yang terjadi.
Tenaga Listrik 3
fasaB
Motor Induksi
3 fasa
Generator
Sinkron 1 fasa Sensor Arus
Mikrokontroler Penampil
Beban (lampu
4
BABBIIB
DASARBTEORIB
B
2.1
MotorBInduksiB3BFasaB
Motor induksi merupakan motor arus bolak-balik (AC) yang paling luas digunakan karena kesederhanaannya, konstruksinya yang kuat dan karakteristik kerja yang baik. Motor induksi terdiri dari dua bagian : stator atau bagian yang diam dan rotor atau bagian
yang berputar, dimana kedua bagian ini dipisahkan oleh suatu celah udara. Bagian stator
dihubungkan ke catu tegangan bolak-balik (AC), sedangkan bagian rotor tidak dihubungkan secara listrik ke pencatu tetapi memiliki arus yang dihasilkan oleh adanya
arus induksi yang ditimbulkan dari arus stator, mirip dengan kerja suatu transformator.
Bekerjanya motor induksi bergantung pada medan magnetik putar yang ditimbulkan dalam
celah udara motor oleh adanya arus stator. Lilitan stator 3 fasa dililitkan dengan lilitan
fasanya berjarak 120 derajat listrik. Jika lilitan diberi energy dari catu 3 fasa maka akan
timbul fluks pada masing-masing fasa. Ketiga fluks tersebut bergabung membentuk fluks
yang bergerak mengelilingi permukaan stator pada kecepatan konstan. Fluks ini disebut
medan magnetik berputar. Dengan adanya medan putar ini akan menyebabkan rotor
berputar dengan arah yang sama dengan fluks putar. Kecepatan medan putar dapat
dirumuskan sebagai :
(2.1)
2.1.1
KonstuksiBMotorBInduksiB3BFasaB
Konstruksi motor induksi 3 fasa terbagi menjadi dua bagian, yaitu [14]:
a. Stator
Gambar 2.1. Stator
b. Rotor.
Rotor adalah bagian dari mesin yang berputar dan terletak pada bagian dalam.
Gambar 2.2. Rotor
2.1.2
MotorBKapasitorB
Pada motor kapasitor, sebuah kapasitor dipasang seri dengan lilitan bantu dengan tujuan agar diperoleh beda fasa yang besar antara arus pada lilitan utama dan arus pada lilitan bantu. Terdapat 3 macam motor kapasitor, yaitu [12] :
a. Motor Kapasitor Start
Skema rangkaian motor kapasitor start adalah seperti pada gambar 2.3 berikut
ini :
b. Motor Kapasitor Start dan Run
Pada motor kapasitor start dan run terdapat dua buah kapasitor yang dirangkai
seperti pada gambar 2.4. Pada saat start, C1 dan C2 terhubung semua sehingga
diperoleh beda fasa besar antara arus pada lilitan utama dan arus pada lilitan bantu dan diperoleh torsi awal yang sangat besar. Setelah putaran motor mencapai 70% - 80%
putaran normal, kapasitor C1(kapasitor start) terlepas namun kapasitor C2(kapasitor
run) tetap terhubung.
Gambar 2.4. Skema rangkaian motor kapasitor start dan run.
c. Motor Kapasitor Permanen
Pada motor ini terdapat kapasitor yang terpasang tetap (permanen) secara seri dengan lilitan bantu. Skema rangkaian motor kapasitor permanen seperti gambar 2.5. Karena kapasitor terpasang secara terus menerus, maka torsi yang dihasilkan baik pada saat start maupun setelah berputar nominal relatif tetap. Hal ini berarti bahwa motor ini banyak digunakan pada peralatan yang membutuhkan torsi baik awal maupun torsi saat beroperasi yang relatif tetap [12].
2.2
TeoriBTenagaBListrikB1BFasaBkeBMotorBInduksiB3BFasaB
Untuk mengoperasikan motor induksi 3 fasa secara normal dan langsung hanya dengan sistem tenaga listrik 1 fasa dengan menambahkan kapasitor. Dalam mengoperasikan motor induksi 3 fasa, kapasitor diletakkan pada sisi kumparan bantu (impedansi lebih besar). Kapasitor yang digunakan, diserikan dengan dua kumparan motor (kumparan R dan S). Dengan penambahan kapasitor tersebut, sama saja dengan mengubah rangkaian kumparan motor induksi 3 fasa menjadi rangkaian motor induksi 1 fasa jenis motor kapasitor. Pada gambar 2.6 berikut ini adalah gambar skema rangkaian motor induksi 3 fasa yang telah diberi tambahan kapasitor.
Gambar 2.6. Rangkaian kapasitor pada kumparan motor induksi 3 fasa
2.3
KapasitorB
Kapasitor atau kondensator ( C ) adalah komponen dasar elektronika yang termasuk dalam komponen pasif yang digunakan untuk menyimpan muatan listrik dalam jangka waktu tertentu. Kapasitor ini ditemukan oleh Michael Faraday, itu sebabnya mengapa satuan dari kapasitor adalah Farad. Pada umumnya kapasitor terdiri atas dua plat logam yang di pisahkan oleh suatu bahan penyekat biasa disebut bahan dielektrik yaitu berupa vacum udara, keramik, gelas, mika, dan lain – lain, kedua plat ini di beri muatan listrik yang sama besar tapi yang satu positif dan lainnya negatif.
negatif). Jika selama proses penyimpanan terjadi hal ini maka muatan akan tetap dilepaskan walaupun proses penyimpanan belum selesai (kapasitor belum terisi penuh).
Karena pada penelitian ini menggunakan kapasitor sebagai komponen untuk membantu kinerja motor induksi 3 fasa, maka tahap selanjutnya mencari nilai kapasitor jalan (Cr) dan kapasitor start (Cs). Kapasitor yang digunakan pada penelitian ini diserikan dengan dua kumparan motor (kumparan R dan S). Apabila diberikan tegangan sumber ’Vs’ pada kapasitor, maka untuk mendapatkan nilai Cr dapat menggunakan persamaan sebagai berikut[3]:
(2.2)
Keterangan : C = Cr = Kapasitor jalan
Iph = Arus fasa
ω = 2.(π).(f)
Vs = Tegangan sumber
Selanjutnya untuk tenaga penggerak awal yang besar diperlukan kapasitor start (Cs). Untuk menentuan nilai dari Cs tersebut yaitu mengambil data kapasitor dari jurnal pihak lain yang telah melakukan penelitian serupa terlebih dahulu [3].
2.4
GeneratorBSinkronB
Generator adalah suatu mesin yang mengubah tenaga mekanik menjadi tenaga listrik melalui proses induksi elektromagnetik, generator memperoleh energi mekanik dari prime
mover. Generator AC dikenal dengan sebutan alternator. Generator diharapkan dapat
mengatasi kebutuhan tenaga listrik/energi listrik pada saat terjadi gangguan sistem catu daya utama, dimana suplai tenaga listrik/sumber energi listrik cadangan tersebut digunakan untuk beban prioritas dalam industri/pabrik.
Pada gambar 2.7 merupakan bentuk fisik umum dari sebuah alternator.
Gambar 2.7. Alternator
Pada dasarnya alternator memiliki beberapa komponen utama. Berikut ini gambar 2.8 adalah komponen-kompenen utama dari alternator.
Gambar 2.8. Komponen utama alternator Keterangan :
1. Rumah bagian belakang 6. Stator
2. Plat dudukan dioda 7. Rotor
3. Dioda daya 8. Kipas
4. Dioda arus medan 9. Pully
2.5
MikrokontrolerBAVRB
Mikrokontroler adalah sebuah sistem mikroprosesor yang di dalamnya sudah
terdapat CPU, ROM, RAM, I/O, clock dan peralatan internal lainya yang sudah saling
terhubung dan terorganisasi (teralamati) dengan baik oleh pabrik pembuatnya dan dikemas
dalam satu chip yang siap pakai [5]. Sehingga pengguna tinggal memprogram isi ROM
sesuai aturan penggunaan oleh pabrik yang membuatnya.
2.5.1
KonstruksiBATmega8535B
Mikrokontroler ATmega8535 memiliki 3 jenis memori, yaitu memori flash, memori data dan memori EEPROM [5]. Ketiganya memiliki ruang sendiri dan terpisah.
a. Memori flash
ATmega8535 memiliki kapasitas memori flash sebesar 8 Kbyte yang terpetakan dari
alamat 0000h – 0FFFh, masing-masing alamat memiliki lebar data 16 bit. Memori
program ini terbagi menjadi 2 bagian yaitu bagian program boot dan bagian program
aplikasi. b. Memori data
ATmega8535 memiliki kapasitas memori data sebesar 608 byte yang terbagi menjadi 3 bagian yaitu register serba guna, register I/O dan SRAM. ATmega8535 memiliki 32 byte register serba guna, 64 byte register I/O yang dapat diakses sebagai bagian dari memori RAM (menggunakan instuksi LD atau ST) atau dapat juga diakses sebagai I/O (menggunakan instruksi IN atau OUT), dan 512 byte digunakan untuk memori data SRAM.
c. Memori EEPROM
ATmega8535 memiliki memori EEPROM sebesar 512 byte yang terpisah dari memori program maupun memori data. Memori EEPROM ini hanya dapat diakses dengan menggunakan register-register I/O yaitu register EEPROM Address, register EEPROM
Data, dan register EEPROM Control. Untuk mengakses memori EEPROM ini
Gambar 2.9. Konfigurasi pin ATmega8535 [5]
Konfigurasi pin ATmega8535 dapat dilihat pada Gambar 2.9. Dari gambar dapat
dijelaskan fungsi dari masing-masing pin Atmega8535 sebagai berikut [5]:
a. VCC merupakan pin yang berfungsi sebagai masukan catu daya.
b. GND merukan pin Ground.
c. Port A (PortA0…PortA7) merupakan pin input/output dua arah dan pin masukan
ADC.
d. Port B (PortB0…PortB7) merupakan pin input/output dua arah dan dan pin fungsi
khusus, seperti dapat dilihat pada Tabel 2.1.
Tabel 2.1 Fungsi khusus port B [5]
PinB FungsiBKhususB
PB7 SCK (SPI Bus Serial Clock)
PB6 MISO (SPI Bus Master Input/ Slave Output)
PB5 MOSI (SPI Bus Master Output/ Slave Input)
PB4 SS (SPI Slave Select Input)
PB3 AIN1 (Analog Comparator Negative Input)
OC0 (Timer/Counter0 Output Compare Match Output)
PB2 AIN0 (Analog Comparator Positive Input)
INT2 (External Interrupt 2 Input)
PB1 T1 (Timer/ Counter1 External Counter Input)
PB0 T0 T1 (Timer/Counter External Counter Input)
[image:30.595.100.521.289.676.2]e. Port C (PortC0…PortC7) merupakan pin input/output dua arah dan pin fungsi khusus, seperti dapat dilihat pada Tabel 2.2.
Tabel 2.2 Fungsi hhusus port C [5]
PinB FungsiBkhususB
PC7 TOSC2 ( Timer Oscillator Pin2)
PC6 TOSC1 ( Timer Oscillator Pin1)
PC5 Input/Output
PC4 Input/Output
PC3 Input/Output
PC2 Input/Output
PC1 SDA ( Two-wire Serial Buas Data Input/Output Line)
PC0 SCL ( Two-wire Serial Buas Clock Line)
f. Port D (PortD0…PortD7) merupakan pin input/output dua arah dan pin fungsi
khusus, seperti yang terlihat pada Tabel 2.3.
Tabel 2.3 Fungsi khusus port D [5]
PinB FungsiBkhususB
PD7 OC2 (Timer/Counter Output Compare Match Output)
PD6 ICP (Timer/Counter1 Input Capture Pin)
PD5 OC1A (Timer/Counter1 Output Compare A Match Output)
PD4 OC1B (Timer/Counter1 Output Compare B Match Output)
PD3 INT1 (External Interrupt 1 Input)
PD2 INT0 (External Interrupt 0 Input)
PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)
g. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler.
h. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
i. AVCC merupakan pin masukan tegangan untuk ADC.
2.5.2
Reset
BdanBOsilatorBEksternalB
Chip akan reset jika tegangan catu nol atau pin RST dipaksa 0 [6]. Jika
membutuhkan tombol reset, dapat ditambah dengan rangkaian reset seperti pada Gambar 2.10.
Gambar 2.10. Rangkaian reset [6]
2.5.3
ADCB(
Analog to Digital Converter
)B
Sinyal masukan dari pin ADC akan dipilih oleh multiplexer (register ADMUX)
untuk diproses oleh ADC[6]. Karena converter ADC dalam chip hanya satu buah
sedangkan saluran masukanny ada delapan maka dibutuhkan multiplexer untuk memilih
input pin ADC secara bergantian. ADC mempunyai rangkaian untuk mengambil sampel
dan hold (menahan) tegangan input ADC mempunyai catu daya yang terpisah yaitu pin
AVCC-AGND. AVCC tidak boleh berbeda ±0,3V dari Vcc.
Operasi ADC membutuhkan tegangan referensi VREF dan clock Fade (register
ADCSRA). Tegangan referensi eksternal pada pin AREF tidak boleh melebihi AVCC.
Tegangan referensi eksternal dapat di-decouple pada pin AREF dengan kapasitor untuk
mengurangi derau. Atau dapat menggunakan tegangan referensi internal sebesar 2,56V (pin Aref diberi kapasitor secara eksternal untuk menstabilkan tegangan referensi internal). ADC mengonversi tegangan input analog menjadi bilangan digital sebesar 10-bit. GND (0 volt) adalah nilai minimum yang mewakili ADC dan nilai maksimum ADC diwakili oleh
tegangan pada pin AREF minus 1 LSB. Hasil konversi ADC disimpan dalam register
pasangan ADCH:ADCL.
Sinyal input ADC tidak boleh melebihi tegangan referensi. Nilai digital input ADC untuk resolusi 10-bit (1024) adalah:
Kode digital = (Vinput/Vref) x1024 (2.3) Untuk resolusi 8-bit (256) :
Misalnya masukan suatu pin ADC dengan resolusi 8-bit adalah 2,5V dan tegangan referensi yang digunakan Vref internal sebesar 2,56V sehingga kode digital-nya adalah:
Kode digital = (2500 mV/2560 mV) x256 = 250 = 0xFA. Akurasi ADC dalam chip tidak sempurna, akurasinya ±2LSB sehingga kemungkinan kode yang dihasilkan tidak tepat 0xFA bisa jadi 0xF8, 0xF9, 0xFB, atau 0xFC.
2.5.3.1
ModeBOperasiB
1.
ModeBkonversiBtunggalB
Dalam mode ini konversi dilakukan untuk sekali pembacaan sampel tegangan
masukan, jika ingin membaca lagi maka harus disampel lagi sehingga kita dapat mengkonversi tegangan masukan untuk saat-saat yang kita butuhkan saja [6]. Mode
tunggal dipilih dengan meng-clear bit-ADFR dalam register ADCSRA. Konversi
tunggal memulai konversi ketika bit-ADSC di-set, dan bit tersebut tetap sampai
satu kali konversi selesai (complete), setelah (complete) itu maka otomatis oleh CPU bit-ADSC akan clear. Ketika konversi sedang berlangsung dan kita mengubah saluran (channel) masukan ADC maka hal tersebut tidak akan diubah oleh CPU hingga konversi ADC saluran tersebut selesai.
2.
ModeBkonversiB
free running
B
Dalam mode ini konversi dilakukan terus menerus secara kontinyu (ADC membaca sampel tegangan masukan lalu dikonversi hasilnya masukan ke register ADCH:ADCL) terus menerus [6]. Ketika kita membaca ADC selagi ADC mengkonversi tegangan sedang berlangsung, maka yang terbaca adalah hasil ADC yang terakhir yang dibaca oleh ADC.
Mode free running dipilih dengan men-set bit-ADFR dalam register ADCSRA. Konversi pertama dalam mode ini dimulai dengan men-set bit-ADSC. Dalam mode
ADC bekerja secara independen (tidak bergantung) dari flag interupsi ADC
(apakah ADIF set atau clear sama saja).
2.5.3.2
RegisterBPengendaliBADCB
1.
ADCB
Multiplexer Selection Register
B–BADMUXB
Tabel 2.4. Register ADMUX [6]
Tabel 2.4 menunjukan register pada ADMUX dan Tabel 2.4 menunjukkan pemilihan tegangan referensi [6].
Bit 7:6 – REFS1:0: Reference Selection Bits
[image:34.595.100.518.138.715.2]Kedua bit ini bertugas memilih tegangan referensi yang digunakan. Tabel 2.5. Pemilihan tegangan referensi [6]
Tabel 2.5 menujukkan pemilihan tegangan referensi pada ADC. Bit 5 – ADLAR: ADC Left Adjust Result
Bit ini berakibat pada format data hasil konversi dalam register ADCH: ADCL (lihat register tersebut)
Bit 3:0 – MUX3:0: Analog Channel Selection Bits
Bit – bit ini memilih saluran masukan untuk ADC, seperti terlihat pada Tabel 2.6. Tabel 2.6. Pemilih pin masukan ADC [6]
2.
ADCB
Control and Status Register
BAB–BADCSRABB
Tabel 2.7 menunjukkan register pada ADCSRA [6]. Bit 7 – ADEN : ADC Enable
Bit pengaktif ADC (ADEN=0 disable / ADEN =1 enable). Bit 6 – ADSC: ADC Start Conversion
Dalam mode konversi tungal penge-set-an bit ini maka akan memulai(start) konversi ADC untuk sekali konversi.
Bit 5 – ADFR: ADC Free Running Select
Bit ini memilih mode operasi yang digunakan, ketika bit ini di-set maka ADC akan
menggunakan Free running di mana dalam mode ini ADC disampel dan diperbarui
secara simultan/kontinyu. Ketika bit ini di-clear maka akan mengakhiri mode free
running dan masuk ke mode konversi tunggal (single conversion). Bit 4 – ADIF: ADC Interrupt Flag
Bit ini akan set secara otomatis ketika konversi ADC telah selesai(complete), dan
akan clear ketika eksekusi interupsi ADC conversion complete. Bit 3 – ADIE: ADC Interrupt Enable
Bit ini bertugas untuk mengaktifkan interupsi ADC conversion complete (ADIE=0
disable / ADIE=1 enable).
Bit 2:0 – ADPS2:0: ADC Prescaler Select Bits
Bit – bit ini menentukan faktor pembagi frekuensi CPU yang digunakan untuk clock ADC, seperti yang terlihat pada Tabel 2.8
3.
The
ADCBDataBRegisterB–BADCLB
and
BADCHB
Tabel 2.9. Register Data ADC, ADLAR=0 [6]
Tabel 2.10. Register Data ADC, ADLAR=1 [6]
Tabel 2.9 menunjukkan register data ADC saat ADLAR=0 dan Tabel 2.10 menunjukkan register data ADC saat ADLAR=1 [6]. Ketika konversi selesai, maka hasilnya dapat ditemukan pada register ADCH : ADCL. Ketika ADCL dibaca maka ADC tidak akan diperbarui sampai ADCH dibaca.
2.6
SensorBArusBACS758B
Teknologi Hall effect yang diterapkan oleh Allegro menggantikan fungsi resistor shunt dan current transformer menjadi sebuah sensor dengan ukuran yang relatif jauh lebih kecil. Aliran arus listrik yang mengakibatkan medan magnet yang menginduksi bagian dynamic offset cancellation dari ACS758 [7].
ACS758 adalah Hall Effect current sensor, seperti yang ditunjukan pada Gambar 2.11 Hall effect allegro ACS758 merupakan sensor yang presisi sebagai sensor arus AC atau DC dalam pembacaan arus didalam dunia industri, otomotif, komersil dan sistem-sistem komunikasi. Pada umumnya aplikasi sensor ini biasanya digunakan untuk mengontrol motor, deteksi beban listrik, switched-mode power supplies dan proteksi beban berlebih.
Sensor ini memiliki pembacaan dengan ketepatan yang tinggi, karena didalamnya
terdapat rangkaian low-offset linear Hall dengan satu lintasan yang terbuat dari tembaga.
terdapat didalamnya yang menghasilkan medan magnet yang di tangkap oleh integrated Hall IC dan diubah menjadi tegangan proporsional. Ketelitian dalam pembacaan sensor dioptimalkan dengan cara pemasangan komponen yang ada didalamnya antara penghantar yang menghasilkan medan magnet dengan hall transducer secara berdekatan. Persisnya, tegangan proporsional yang rendah akan menstabilkan Bi CMOS Hall IC yang didalamnya yang telah dibuat untuk ketelitian yang tinggi oleh pabrik.
B
Gambar 2.11. Sensor arus ACS758 [7]
Keluaran dari sensor ini yaitu berupa tegangan analog dengan sensitivitas 40 mV/A,
(>VCC/2) saat peningkatan arus pada penghantar arus (dari pin 4 ke pin 5. Artinya, setiap
ada arus yang melewati sensor sebesar 1A, maka sensor akan merespon dengan
memberikan keluaran sebesar 40 mV/A. Gambar 2.12. menunjukkan port masukan dan
port keluaran ACS758. Hambatan dalam penghantar sensor sebesar 100 µΩ dengan daya
yang rendah. Jalur terminal konduktif secara kelistrikan diisolasi dari sensor leads(pin 1 sampai pin 3). Hal ini menjadikan sensor arus ACS758 dapat digunakan pada aplikasi-aplikasi yang membutuhkan isolasi listrik tanpa menggunakan opto-isolator atau teknik
isolasi lainnya yang mahal. Ketebalan konduktor tembaga di dalam sensor memungkinkan
sampai pada kondisi kondisi high overcurrent. Sensor ini telah dikalibrasi oleh pabrik.B
2.7
ICBRegulatorB
IC 78xx adalah regulator tegangan positif dengan tiga terminal, masing-masing
masukan, ground dan keluaran [8]. IC 78xx tersedia untuk beberapa nilai tegangan
keluaran seperti pada tabel 2.11 berikut :
Tabel 2.11. Nilai tegangan IC 78xx [8]
Tipe B
VoutB (Volt)B
Iout (A)B Vin (Volt)B 78xxCB 78MLxxB 78MxxB MinB MaksB
7805 5 1 0,1 0,5 7,5 20
7806 6 1 0,1 0,5 8,6 21
7808 8 1 0,1 0,5 10,5 23
7809 9 1 0,1 0,5 11,5 24
7810 10 1 0,1 0,5 12,5 25
7812 12 1 0,1 0,5 14,5 27
7815 15 1 0,1 0,5 17,5 30
7818 18 1 0,1 0,5 21 33
7824 24 1 0,1 0,5 27 38
Meskipun semula dirancang untuk regulator tegangan tetap, namun regulator ini dapat dikembangkan untuk tegangan dan arus yang dapat diatur. Rangkaian dasar 78xx ditunjukkan pada gambar 2.13, untuk tegangan dan arus keluaran sesuai nilai nominalnya.
Gambar 2.13. Rangkaian dasar regulator 78xx [8]
Kapasitor C1 diperlukan jika regulator jauh dari kapasitor filter pencatu daya
sedangkan C2 diperlukan untuk memperbaiki tanggapan kilasan dan penindasan kerut
tegangan keluaran (lihat tabel 2.11) jika kurang maka regulator tidak berfungsi tetapi bila
melebihi VIN maksimumnya dapat merusak regulator.
2.8.
FilterBKapasitorB
Filter dalam rangkaian penyearah digunakan untuk memperkecil tegangan ripple,
sehingga dapat diperoleh tegangan keluaran yang lebih rata, dengan memanfaatkan proses pengisian dan pengosongan muatan kapasitor [9]. Harga kapasitansi kapasitor ditentukan dengan persamaan berikut :
Vr(rms) = (2.5)
Vr(PP) = (2.6)
Dengan IDC adalah arus maksimal penyearah (ampere), C adalah kapasitor yang
digunakan sebagai filter (Farad). VM adalah tegangan masukan arus bolak balik, Vr(PP)
tegangan ripple puncak ke puncak dan Vr(rms) adalah tegangan ripple. VDC MIN adalah
tegangan minimal yang dibutuhkan oleh IC regulator.
2.8
HukumBOhmB
Digunakan pada rangkaian tertutup [10]:
Gambar 2.14. Rangkaian arus [10]
Gambar 2.14 menunjukkan rangkaian arus. Besarnya arus I berubah sebanding dengan tegangan V dan berbanding terbalik dengan beban tahanan R atau dinyatakan dengan rumus pada persamaan 2.7. Besar daya P adalah hasil kali antara arus I dan tegangan V atau dinyatakan dengan rumus pada persamaan 2.8.
R V
I (2.7)
V I
2.9.
LCDB
LCD merupakan salah satu perangkat penampil yang sekarang ini mulai banyak digunakan [11]. Penampil LCD mulai dirasakan menggantikan fungsi dari CRT (Cathode Ray Tube), yang sudah berpuluh-puluh tahun digunakan manusia sebagai penampil gambar/text baik monochrome (hitam dan putih), maupun yang berwarna. Teknologi LCD memberikan lebih keuntungan dibandingkan dengan teknologi CRT, karena pada dasarnya, CRT adalah tabung triode yang digunakan sebelum transistor ditemukan. Beberapa keuntungan LCD dibandingkan dengan CRT adalah konsumsi daya yang relatif kecil, lebih ringan, dan tampilan yang lebih bagus.
B
Gambar 2.15. Bentuk fisik LCD16x2.[11]
LCD memanfaatkan silikon atau galium dalam bentuk kristal cair sebagai pemendar cahaya. Pada layar LCD, setiap matrik adalah tersusun dua dimensi piksel yang dibagi dalam baris dan kolom. Dengan demikian, setiap pertemuan baris dan kolom adalah sebuah
LED terdapat sebuah bidang latar (backplane), yang merupakan lempengan kaca bagian
belakang dengan sisi dalam yang ditutupi oleh lapisan elektroda transparan. Dalam keadaan normal, cairan yang digunakan memiliki warna cerah. Daerah-daerah tertentu pada cairan akan berubah warnanya menjadi hitam ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat pada sisi dalam lempeng kaca bagian depan.
Keunggulan LCD adalah hanya menarik arus yang kecil (beberapa mikro amper),
sehingga alat atau sistem menjadi portable karena dapat menggunakan catu daya yang
Gambar 2.16. Konfigurasi pin LCD[11]
Operasi dasar pada LCD terdiri dari empat, yaitu instruksi mengakses proses internal, instruksi menulis data, instruksi membaca kondisi sibuk, dan instruksi membaca data. ROM pembangkit sebanyak 192 tipe karakter, setiap karakter dengan huruf 5x7 dot matrik. Kapasitas pembangkit RAM 8 tipe karakter (membaca program), maksimum
pembacaan 80x8 bit tampilan data. Perintah utama LCD adalah Display Clear, Cursor
[image:41.595.103.514.321.699.2]Shift, dan Display Shift. Tabel 2.12 menunjukkan operasi dasar LCD. Tabel 2.12. Operasi dasar LCD[9]
RSB R/WB OperasiB
0 0 Input Instruksi ke LCD
0 1 Membaca Status Flag (DB7) dan alamat Counter (DB0) sampai (DB6)
1 0 Menulis Data
1 1 Membaca Data
Tabel 2.13. Konfigurasi pin LCD[9]
PinBNoB KeteranganB KonfigurasiBHubungB
1 GND Ground
2 VCC Tegangan +5VDC
3 VEE Ground
4 RS Kendali Rs
5 RW Ground
Lanjutan Tabel 2.13. Konfigurasi pin LCD
7 D0 Bit 0
8 D1 Bit 1
9 D2 Bit 2
10 D3 Bit 3
11 D4 Bit 4
12 D5 Bit 5
13 D6 Bit 6
14 D7 Bit 7
15 A Anoda (+5VDC)
16 K Katoda (Ground)
Tabel 2.14. Konfigurasi pin LCD[11]
PinB BilanganBBinerB KeteranganB
RS 0 1 Inisialisasi Data
RW 0 Tulis LCD/W (Write)
1 Baca LCD/R (Read)
E 0 Pintu data terbuka
1 Pintu data tertutup
Lapisan film yang berisi kristal cair diletakkan di antara dua lempeng kaca yang telah ditanami elektroda logam transparan. Saat tegangan dicatukan pada beberapa pasang elektroda, molekul-molekul kristal cair akan menyusun diri agar cahaya yang mengenainya akan dipantulkan atau diserap. Dari hasil pemantulan atau penyerapan cahaya tersebut akan terbentuk pola huruf, angka, atau gambar sesuai bagian yang diaktifkan.
LCD membutuhkan tegangan dan daya yang kecil sehingga sangat populer untuk
Positioning System (GPS), bargraph display, dan multimeter digital. LCD umumnya
dikemas dalam bentuk Dual In-line Package (DIP) dan mempunyai kemampuan untuk
menampilkan beberapa kolom dan baris dalam satu panel. Untuk membentuk pola, baik karakter ataupun gambar, pada kolom dan baris secara bersamaan digunakan digunakan
metode screening. Metode screening adalah mengaktifkan daerah perpotongan suatu
25
BAB III
PERANCANGAN PENELITIAN
3.1
Blok Diagram Rangkaian
Di dalam perancangan ini terdiri dari beberapa bagian, yaitu : rangkaian sensor arus,
pengondisi sinyal, mikrokontroler dan penampil. Sensor yang digunakan untuk mengukur
arus adalah ACS758. Perubahan keluaran dari sensor akan masuk ke mikrokontroler.
Mikrokontroler ATMega 8535 berfungsi mengatur dan memproses data masukan dari
sensor, kemudian pengukuran arus akan ditampilkan pada penampil LCD. Gambar 3.1
menunjukkan diagram blok sistem perancangan alat pengoperasian motor induksi 3 fasa
pada sistem kelistrikan 1 fasa.
Gambar 3.1. Diagram blok rancangan
MI 3 fasa
Listrik 1 fasa
Sinkron 1 fasa
Generator
Sensor Arus
ACS758
Mikrokontroler
ATMega 8535
LCD
Beban
(Lampu
3.2
Perancangan Perangkat Keras
3.2.1
Perancangan Rangkaian Sensor Arus
Sensor yang digunakan pada penelitian ini adalah ACS758. Sensor ini akan
mendeteksi arus yang mengalir disebabkan oleh adanya beban yang terpasang. Dari situ
juga keluaran dari sensor akan masuk ke mikrokontroler yang nantinya akan ditampilkan
pada LCD.
Pada rangkaian gambar 3.2, untuk mengaktifkan sensor ini dibutuhkan tegangan
masukan sebesar +5V. Pada kaki 4 dan 5 dihubungkan pada rangkaian beban, untuk
mengukur besar arus yang mengalir pada rangkaian beban. Penghubung komponen
kapasitor pada sensor ACS758 merupakan rekomendasi dari
data sheet
. Selanjutnya
keluaran sensor dihubungkan pada
port
A0 mikrokontroler.
Gambar 3.2. Rangkaian sensor arus ACS758
Dikarenakan beban yang digunakan tidak lebih daripada 540 watt maka dapat
ditentukan arus maksimal yang akan diukur. Berdasarkan persamaan 2.8, maka
I
maxdapat
dihitung sebagai berikut :
� = �. �
(2.8)���� =��
I
max
= 540 / 12 = 45 A
Tabel 3.1. Tegangan keluaran sensor terhadap arus yang diukur
ITerukur (A) Vout Sensor (mV)
0 A 2500 mV
5 A 2700 mV
10 A 2900 mV
20 A 3300 mV
40 A 4100 mV
45 A 4300 mV
3.2.2
Perancangan Rangkaian Mikrokontroler
Pada rangkaian mikrokontroler seperti pada gambar 3.3,
port
yang akan digunakan
adalah
port
A dan
port
C.
Port
A digunakan sebagai
port
ADC (
Analog to Digital
Conventer
). Data analog dari sensor ACS758 yang berupa tegangan diberikan kepada
port
A0. Data tersebut kemudian di konversi ke bentuk data digital dan siap diproses oleh
mikrokontroler. Untuk PC0, PC1, PC2, dan PC3 digunakan sebagai
port
data, sedangkan
PC4 dan PC5 digunakan sebagai
port
pengaturan
interface
LCD. Pada port C7 digunakan
sebagai keluaran untuk indikator lampu LED ketika sistem telah ON atau siap digunakan.
Gambar 3.3. Rangkaian mikrokontroler
PC6/TOSC1 28 PC5 27 PC4 26 PC3 25 PC2 24 PC1/SDA 23 PC0/SCL 22 PC7/TOSC2 29 PA6/ADC6 34 PA5/ADC5 35 PA4/ADC4 36 PA3/ADC3 37 PA2/ADC2 38 PA1/ADC1 39 PA0/ADC0 40 PA7/ADC7 33 PB6/MISO 7 PB5/MOSI 6 PB4/SS 5 PB3/AIN1/OC0 4 PB2/AIN0/INT2 3 PB1/T1 2 PB0/T0/XCK 1 PB7/SCK 8 PD6/ICP1 20 PD5/OC1A 19 PD4/OC1B 18 PD3/INT1 17 PD2/INT0 16 PD1/TXD 15 PD0/RXD 14 PD7/OC2 21 RESET 9 XTAL1 13 XTAL2 12 AVCC 30 AREF 32 U1 ATMEGA8535 1 ACS758 Sensor Arus 1 2 3 4 5 6 LCD CONN-SIL6 X1 CRYSTAL C1 27pF C2 27pF C3 10uF R1 10k 5 V
PC0. DB 1 LCD PC1. DB 2 LCD PC2. DB3 LCD PC3. DB4 LCD
PC4. Enable LCD PC5. RS LCD
1 LED
Terdapat saklar masukan pada rangkaian yang berfungsi untuk mereset keadaan
mikrokontroler.
3.2.3
Reset Eksternal
Sistem pada mikrokontoler akan mereset bila pin
reset
mendapat logika 0. Pin
reset
dihubungkan dengan resistor (R1) yang terhubung ke vcc dan kapasitor yang terhubung ke
ground
. Gambar 3.4 adalah rangkaian
reset
eksternal.
Gambar 3.4. Rangkaian
reset
eksternal
3.2.4
Osilator
Salah satu kelebihan AVR adalah kecepatan dalam eksekusi program. AVR
membutuhkan waktu satu siklus untuk melakukan eksekusi terhadap suatu intruksi.
Pada perancangan digunakan 12 Mhz sebagai masukan clock dengan 2 kapasitor
sebesar 27 pF (
data sheet AVR hardware design considertions
). Gambar 3.5 menunjukan
rangkaian osilator.
Gambar 3.5. Rangkaian osilator
3.2.5
Kapasitor
Dalam perancangan ini kapasitor yang digunakan diserikan dengan dua kumparan
motor (kumparan R dan S) ditunjukkan pada gambar 3.6.
1 J1 RESET 8535 C1 10uF R1 10k 1 J2 +5V 12 Mhz CRY STAL C5
Gambar 3.6. Penempatan dan nilai kapasitor yang digunakan.
Pada kondisi ini bila diberikan tegangan sumber ‘VS’ pada kapasitor,
maka
diperoleh nilai kapasitor jalan (
Cr
) yang digunakan dengan menggunakan persamaan 2.2
yaitu sebesar [3]:
Vs Iph Cr . . 2
220 50 2 2 6 , 3 x x x x
=
2,604 x 10
-5F
Keterangan :
C
=
Cr
= Kapasitor jalan
I
ph= Arus fasa (spesifikasi Motor Induksi 3 fasa)
ω
= 2.(
π
).(
f
)
Vs
= Tegangan sumber
Untuk tenaga penggerak awal yang besar diperlukan kapasitor start (Cs). Sehingga
dibutuhkan kapasitor start (
Cs
) senilai 4,98x10
-5F [3]. Untuk penentuan dari nilai
Cs
tersebut mengambil data kapasitor dari jurnal pihak lain yang telah melakukan penelitian
serupa terlebih dahulu.
3.2.6.
Perancangan Rangkaian Penampil
3.2.6.1. Rangkaian Indikator LED
Pada perancangan ini digunakan LED warna sebagai indikator. LED sebagai
indikator sistem ON (siap digunakan).
Port
yang digunakan untuk menampilkan LED yaitu
pada
port
C7. Jika tegangan keluaran pin I/O ini sebesar 4,8V dan arusnya sebesar 20 mA
(
data sheet AVR ATmega 8538
), maka dengan mengetahui besarnya nilai
�
�dan arus
mikrokontroler, besarnya nilai R pada rangkaian LED berdasarkan persamaan 2.7 dapat
dihitung.
1
R V
I
(2.7)
Dengan nilai
–
nilai :
V = 4,8 V
I = 20 x 10
-3A
240 20
8 , 4 1
m
R Ω
Nilai 240
Ω
di pasaran tidak ada, maka dicari pendekatannya sebesar 330
Ω
. Pada
gambar 3.7 adalah rangkaian indikator LED.
Gambar 3.7. Rangkaian LED
3.2.6.2. Rangkaian LCD
LCD yang digunakan yaitu LCD M1632 dengan lebar
display
2 baris 16 kolom
yang konfigurasinya dapat dilihat pada gambar 3.8. Pada perancangan LCD digunakan dua
buah potensiometer sebesar 10KΩ dengan fungsi untuk mengatur
contrast
dari LCD.
Gambar 3.8. Rangkaian LCD
3.2.7.
Rangkaian Lengkap Mikrokontroler
Pada bagian ini akan menjelaskan secara keseluruhan rangkaian lengkap
mikrokontroler yang akan digunakan. Untuk tegangan keluaran dari sensor arus (ACS758)
sendiri akan masuk pada
port
A0. Bagian
interface-
nya yaitu LCD
port
yang digunakan
antara
port
C0 sampai
port
C5. Indikator jika sistem telah ON atau siap digunakan
menggunakan indikator LED.
Port
yang digunakan untuk indikator LED yaitu pada
port
[image:50.595.86.523.248.562.2]C7. Berikut ini adalah gambar rangkaian lengkap mikrokontroler.
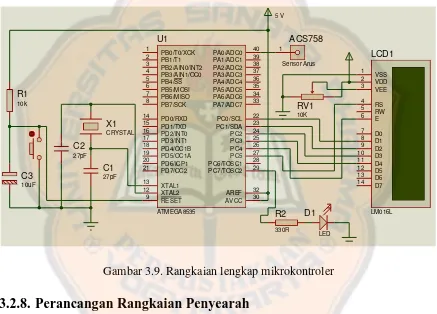
Gambar 3.9. Rangkaian lengkap mikrokontroler
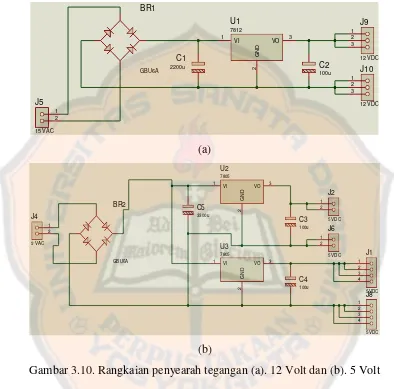
3.2.8.
Perancangan Rangkaian Penyearah
Rangkaian penyearah yang digunakan dapat menghasilkan tegangan 5 dan 12 volt.
Rangkaian ini memperoleh sumber tegangan jala-jala listrik PLN 220 volt. Menggunakan
travo 2A untuk menurunkan tegangan AC 220 Volt menjadi tegangan 15 VAC dan 9 VAC.
Untuk menghasilkan gelombang penuh, maka tegangan 15 VAC dan 9 VAC perlu
disearahkan menggunakan dioda
bridge
, sehingga menghasilkan gelombang penuh.
Komponen pengatur tegangan 12 VDC
yaitu L7812CV, dengan arus maksimal
sebesar 1A. Tegangan keluaran 12 volt digunakan untuk menghidupkan dua buah kipas DC
yang digunakan sebagai pendingin di dalam boks perangat keras elektronik. Rangkaian
catu daya 12 VDC dapat dilihat pada gambar 3.10a, sedangkan untuk tegangan 5 VDC
menggunakan komponen L7805CV, dengan arus maksimal sebesar 1A. Tegangan keluaran
5 VDC digunakan untuk catu daya sensor arus dan LCD. Rangkaian yang digunakan dapat
dilihat pada gambar 3.10b.
(a)
[image:51.595.100.494.167.556.2](b)
Gambar 3.10. Rangkaian penyearah tegangan (a). 12 Volt dan (b). 5 Volt
Perhitungan nilai kapasitor untuk penyearah 12VDC, dilakukan seperti persamaan
2.5 dengan nilai tegangan keluaran trafo diketahui sebesar 15VAC
(VM), arus maksimal
yang diinginkan sebesar 1A dan tegangan masukan minimal IC regulator sebesar 14,5VDC
(VMIN), sehingga diperoleh nilai minimal kapasitor C1 sebagai berikut :
VM = √ − , = 19,81V
Vr (PP) = � − � � = , − , = 5,31V
Vr (rms) =
�
∗�∗�1∗√ = �� �
√
=
�� ��
√ =
,
√ = 1,533V
BR1 GBU6A C1 2200u C2 100u VI
1 VO 3
G N D 2 U1 7812 1 2 J5 15 VAC 1 2 3 J9 12 VDC 1 2 3 J10 12 VDC C3 100u VI 1 VO 3 G N D 2 U2 7805 C4 100u VI
1 VO 3
Vr (rms) =
� ∗�∗�1∗√
1,533 =
∗ ∗�1∗√
1,533 =
, ∗�1
( ,
∗ �
) ∗ , = , ∗ � =�
= , = , � − ��
= µ�Pada perhitungan nilai minimal C1 diperoleh sebesar 1883µF, nilai tersebut tidak
terdapat di pasaran sehingga digunakan nilai kapasitor C1 sebesar 2200µF yang mendekati
nilai perhitungan dan terdapat di pasaran. Pemilihan nilai C1 sebesar 2200µF akan
berdampak memperkecil
ripple
. Penentuan nilai kapasitor C2 yang digunakan adalah
100nF disesuaikan berdasarkan
datasheet
IC regulator L7812CV.
Perhitungan nilai kapasitor untuk penyearah 5VDC, dilakukan seperti persamaan 2.5
dengan nilai tegangan keluaran trafo diketahui sebesar 9VAC
(VM), arus maksimal yang
diinginkan sebesar 1A dan tegangan masukan minimal IC regulator sebesar 7,5VDC (VMIN),
sehingga diperoleh nilai minimal kapasitor C5 sebagai berikut :
VM = √ − , = 11,33V
Vr (PP) = � − � � = , − , = 3,83V
Vr (rms) =
�
∗�∗�3∗√ = �� �
√
=
�� �� √
=
,8
√ = 1,106V
Vr (rms) =
1,106 =
∗ ∗�5∗√
1,106 =
, ∗�5
( , ∗
�
) ∗ , =, ∗ � =
�
= 8 ,= , � − �
�
= µ�3.3.
Perancangan Perangkat Lunak
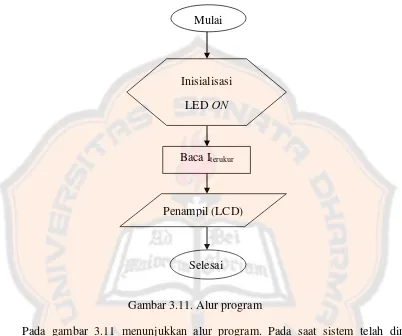
[image:54.595.98.500.154.490.2]3.3.1.
Flowchart
Gambar 3.11. Alur program
Pada gambar 3.11 menunjukkan alur program. Pada saat sistem telah dimulai
mikrokontroler akan menginisialisasi
port-port
yang akan digunakan. LED akan menyala
sebagai indikator sistem siap digunakan. Ketika ada arus yang masuk maka sensor akan
membaca arus tersebut sebagai Iterukur. Iterukur adalah arus beban terpakai yang terukur oleh
sensor. Setelah itu proses selanjutnya data atau nilai yang terbaca tadi akan ditampilkan
pada
interface
LCD.
Mulai
Baca Iterukur
Selesai
Inisialisasi
LED
ON
36
Bab IV
HASIL DAN PEMBAHASAN
Bab ini berisi mengenai penjelasan tentang bentuk fisik dari perangkat keras dan hasil percobaan pengoperasian motor induksi 3 fasa pada sistem tenaga listrik 1 fasa dan pada sistem listrik 3 fasa. Hasil percobaan berupa pengujian rangkaian alat, pengujian keluaran sensor arus ACS758 dalam mendeteksi arus yang terjadi, dan kecepatan putaran motor induksi 3 fasa.
4.1
Bentuk Fisik Perangkat Keras
4.1.1.
Bentuk Fisik Rangkaian Kapasitor
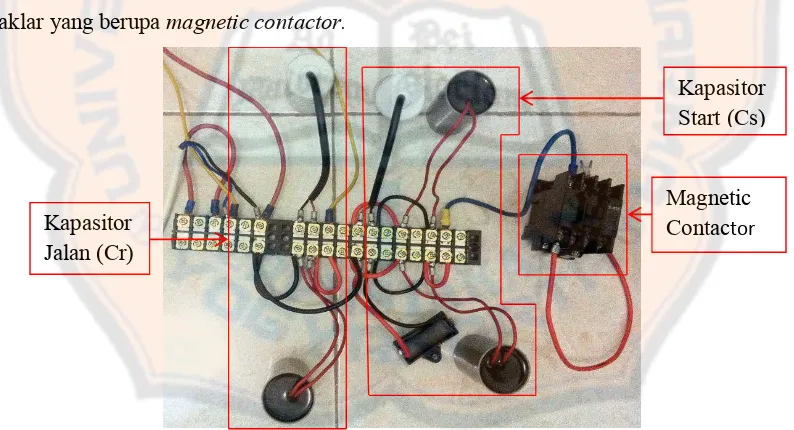
[image:55.612.111.508.350.565.2]Dalam percobaan ini perangkaian kapasitor ditempatkan dalam dua buah terminalm blockmyang digabungkan.mPada gambar 4.1 menunjukkan bentuk fisik rangkaian kapasitor yang digunakan. Selain rangkaian kapasitor yang digunakan, percobaan ini menggunakan saklar yang berupa magneticmcontactor.m
Gambar 4.1. Bentuk fisik rangkaian kapasitor
Pada penelitian ini menggunakan magneticm contactor agar kuat dalam menahan arus yang lewat pada sambungan antara kapasitor dengan titik kutub pada motor induksi 3 fasa. Magneticmcontactor yang digunakan pada tugas akhir ini memiliki tipe S-K10 buatan EWIG.
Magnetic Contactor
Kapasitor Start (Cs)
Selain rangkaian kapasitor ada juga perangkat keras elektronik yang berfungsi untuk mendukung kinerja rangkaian kapasitor. Pada gambar 4.2 merupakan tampilan luar (boks) dari perangkat keras elektronik. Bagian luar boks perangkat keras elektronik terdapat LCD yang memiliki fungsi untuk menampilkan nilai dari arus yang terukur dan nilai tegangan keluaran dari sensor arus (ACS758) yang menuju minimummsystem.m
Gambar 4.2. Boks perangkat keras elektronik
4.1.2.
Cara Penggunaan Alat
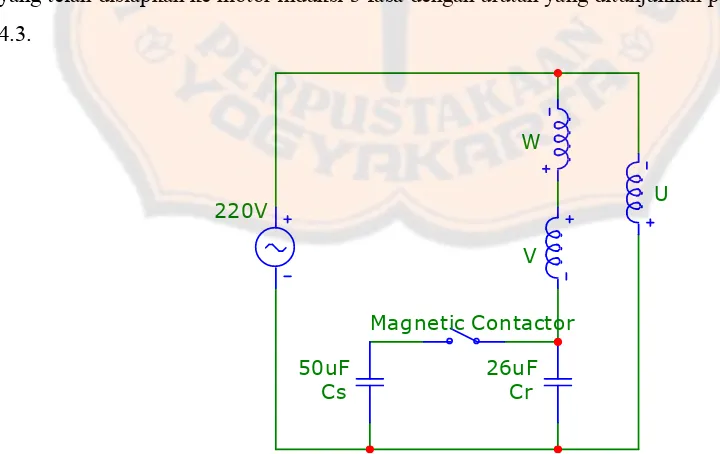
Untuk menggunakan alat ini, user terlebih dulu merangkai rangkaian kapasitor yang telah disiapkan ke motor induksi 3 fasa dengan urutan yang ditunjukkan pada gambar 4.3.
Gambar 4.3. Penempatan rangkaian kapasitor pada motor induksi 3 fasa
W
V
W
Cr 26uF Cs
50uF
[image:56.612.107.467.441.668.2]Pada awal perancangan penelitian, nilai dari kapasitor yang digunakan yaitu sebesar 49,8 µF untuk kapasitor start (CS) dan 25,9 µF untuk kapasitor jalan (CR), tetapi pada
implementasinya sulit menemukan nilai-nilai kapasitor yang sesuai dengan perancangan. Maka pada implementasinya nilai yang digunakan adalah 50 µF untuk kapasitor start (CS)
dan 26 µF untuk kapasitor jalan (CR).
Pada motor induksi terdapat beberapa titik kumparan yaitu kumparan W, V, dan U. Masing-masing kumparan mempunyai dua buah kaki yaitu dengan kode 1 dan 2, misal untuk kumparan W, jadi pada kumparan W terdapat kaki W1 dan kaki W2 begitupun juga dengan kumparan V dan U.
Setelah user merangkai semua rangkaian yang telah dipersiapkan langkah selanjutnya adalah menyalakan rangkaian tersebut dengan memberi tegangan sumber 220 Volt. Posisi saklar/magneticmcontactor pada awalnya berada di posisi ON atau terhubung. Sesaat setelah diberi tegangan 220 Volt kemudian langkah selanjutnya mematikan saklar / magneticmcontactor, tetapi tidak langsung dimatikan saklarnya, tunggu 5 - 10 detik setelah proses pemberian tegangan sumber 220 Volt atau sesaaat motor induksi 3 fasa mulai berputar kemudian baru dimatikan saklar tersebut. Hal ini mempunyai tujuan agar motor induksi 3 fasa mempunyai torsi awal yang besar dan bisa mencapai 70% - 80% dari putaran normal. Motor induksi 3 fasa putaran normalnya sebesar 1400 rpm, ketika putaran motor telah mencapai putaran ideal atau normal maka user dapat menyalakan sistem pengisian accu dan lampu pijar sebagai bebannya. Lampu pijar dan sistem pengisian accu yang telah dinyalakan dapat user ketahui seberapa besar arus yang terukur dengan melihat LCD yang tersedia pada boks perangkat keras elektroniknya, sedangkan untuk mengetahui kecepatan putaran motor induksi 3 fasa yang terjadi dengan menggunakan alat tachometer.
4.1.3.
Perangkat Keras
Elektronik
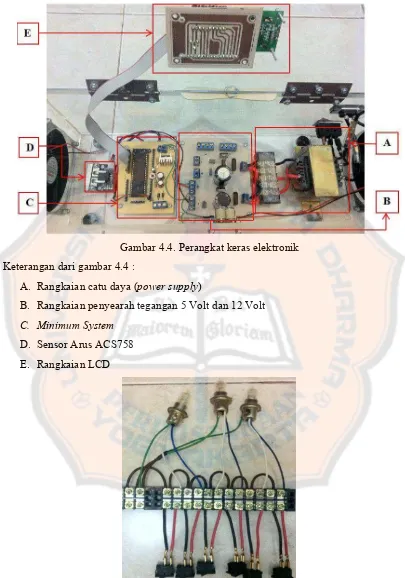
Gambar 4.4. Perangkat keras elektronik Keterangan dari gambar 4.4 :
A. Rangkaian catu daya (powermsupply)
B. Rangkaian penyearah tegangan 5 Volt dan 12 Volt C. MinimummSystemm
D. Sensor Arus ACS758 E. Rangkaian LCD
Untuk mendapatkan nilai variasi beban dalam percobaan ini menggunakan lampu pijar dengan nilai beban yang berbeda-beda pula antara 55 Watt, 35 Watt, dan 25 Watt. Lampu pijar sendiri menggunakan lampu dari kendaran bermotor yaitu tepatnya lampu sepeda motor, sehingga dalam satu lampu terdapat dua elemen lampu. Elemen yang pertama digunakan untuk lampu jarak dekat dan yang satunya lagi digunakan untuk jarak jauh. Jadi masing-masing lampu terdapat dua buah saklar yang berfungsi untuk menghidupkan dan mematikan masing-masing elemen lampu.
[image:59.612.105.517.217.563.2]Berikut ini merupakan gambar - gambar dari komponen penyusun boks perangkat keras elektronik.
Gambar 4.6. Rangkaian LCD
Gambar 4.9. Rangkaian penyearah tegangan
Gambar 4.10. Rangkaian catu daya
Pada perancangan awal tugas akhir ini penulis tidak menyertakan rangkaian catu daya dan penyearah tegangan sendiri karena pada awalnya penulis mempunyai pikiran bahwa akan menggunakan adaptor sebagai catu dayanya, namun pada hasil pembuatannya menggunakan rangkaian catu daya dan rangkaian penyearah sendiri yang telah melalui proses perhitungan.
4.2.
Hasil Pengujian
pengujian normal. Setiap tahap pengujian, dilakukan sebanyak empat kali untuk masing-masing pengambilan data.
4.2.1.
Pengujian Pada Sistee 1 Fasa
[image:61.612.106.512.261.564.2]Pada tahap pengujian ini, masukan yang digunakan untuk mengoperasikan motor induksi 3 fasa menggunakan sistem 1 fasa yang disusun dari rangkaian kapasitor. Rangkaian kapasitor yang telah disusun diletakkan pada sisi kumparan yang mempunyai impedansinya yang lebih besar atau pada sisi kumparan bantu. Pengujian pada sistem 1 fasa dilakukan sebanyak empat kali, yang kemudian dicari nilai rata–ratanya. Pada tabel 4.1 memperlihatkan hasil dari percobaan, pengambilan data Vout sensor arus dan arus yang terukur selama percobaan dilakukan dengan cara melihat nilai yang tertampil pada LCD.
Tabel 4.1. Hasil pengujian pada sistem 1 fasa
Beban Laepu (Watt) Vout Sensor (Volt) Arus (Aepere) RPM
0 2,500 0,000 1489
55 2,726 6,284 1487
80 2,798 8,097 1486
90 2,827 8,826 1486
105 2,853 9,548 1485
115 2,892 10,152 1485
130 2,921 10,996 1484
140 2,941 11,604 1483
150 2,968 12,328 1482
155 2,971 12,449 1482
165 2,997 13,054 1480
175 3,017 13,539 1480
190 3,057 14,502 1478
200 3,075 14,986 1477
Gambar 4.11. Grafik hubungan antara arus terhadap beban lampu pada sistem 1 fasa
Gambar 4.12. Grafik hubungan antara RPM terhadap beban lampu pada sistem 1 fasa
Berdasarkan gambar 4.11 grafik hubungan beban lampu dengan arus yang terukur pada sensor menunjukkan hasil yang berbanding lurus. Berbanding lurus memiliki artian bahwa semakin besar beban yang digunakan, semakin besar pula arus yang terukur oleh sensor. Arus terkecil yang terukur yaitu pada saat tidak ada beban atau 0 Watt adalah sebesar 0 A, sedangkan arus terukur tertinggi yaitu pada beban 225 Watt adalah sebesar 15,953 A. Pada gambar 4.12 menunjukkan grafik hubungan antara beban lampu dengan
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
0 25 50 75 100 125 150 175 200 225 250
A ru s ( A e pe re )
Beban Laepu (Watt)
1474 1475 1476 1477 1478 1479 1480 1481 1482 1483 1484 1485 1486 1487 1488 1489 1490
0 50 100 150 200 250
R
PM
kecepatan putaran motor induksi 3 fasa. Dapat dilihat bahwa grafik tersebut memiliki hubungan yang berbanding terbalik, karena pada saat tidak ada beban kecepatan putaran yang dihasilkan sebesar 1489 RPM kemudian terus menurun kecepatan putarannya seiring dengan bertambah beban yang diberikan. Nilai kecepatan putaran terendah yang terjadi dengan diberi beban sebesar 225 Watt yaitu pada 1475 RPM.
[image:63.612.108.509.248.603.2]Dalam mendapatkan hasil yang lebih baik dan teliti adanya penambahan parameter uji sistem yang dilakukan. Parameter uji sistem yang ditambahkan yaitu tegangan keluaran sistem pada alternator dan daya keluaran. Berikut adalah tabel penambahan parameter uji sistem.
Tabel 4.2. Penambahan parameter uji pada sistem 1 fasa Beban Laepu (Watt)
+ Accu
Vout Alternator (Volt) Arus Alternator (Aepere) Daya Sistee (Watt)
Accum 16 2,430 38,880
55 + accu 15,9 8,500 135,150
80 + accu 15,8 10,650 168,270
90 + accu 15,6 11,150 173,940
105 + accu 15,4 11,690 180,026
115 + accu 15,4 12,640 194,656
1
![Gambar 2.9. Konfigurasi pin ATmega8535 [5]](https://thumb-ap.123doks.com/thumbv2/123dok/869747.610694/30.595.100.521.289.676/gambar-konfigurasi-pin-atmega.webp)
![Tabel 2.2 Fungsi hhusus port C [5]](https://thumb-ap.123doks.com/thumbv2/123dok/869747.610694/31.595.101.517.127.620/tabel-fungsi-hhusus-port-c.webp)
![Tabel 2.5. Pemilihan tegangan referensi [6]](https://thumb-ap.123doks.com/thumbv2/123dok/869747.610694/34.595.100.518.138.715/tabel-pemilihan-tegangan-referensi.webp)
![Tabel 2.12. Operasi dasar LCD[9]](https://thumb-ap.123doks.com/thumbv2/123dok/869747.610694/41.595.103.514.321.699/tabel-operasi-dasar-lcd.webp)