BAB II
TINJAUAN PUSTAKA
2.1. Sistem Distribusi Tenaga Listrik
Sistem distribusi tenaga listrik merupakan sistem dimana listrik yang sudah dibangkitkan oleh pembangkit listrik akan disalurkan ke konsumen listrik. Bagian sistem ini biasanya terdiri dari dua bagian yaitu saluran distribusi primer (tegangan menengah) dimulai dari transformator step-down pada gardu induk saluran transmisi hingga ke transformator distribusi sedangkan bagian dari transformator distribusi hingga ke konsumen akhir disebut sebagai saluran distribusi sekunder (tegangan rendah) seperti yang terlihat pada Gambar 2.1. Distribusi tegangan rendah dapat berupa fasa tunggal, tiga fasa tiga kawat, tiga fasa empat kawat, atau satu fasa tiga kawat [3].
Sistem distribusi secara normal akan mencatu tegangan yang seimbang, namun pada kondisi - kondisi tertentu tegangan yang dicatu bisa saja terjadi ketidakseimbangan antara salah satu fasa dengan fasa yang lain.
Generator Gardu Induk Gardu Induk Beban
Sistem Pembangkit
Sistem Transmisi Sistem Distribusi
2.2. Sistem Tiga Fasa Empat Kawat
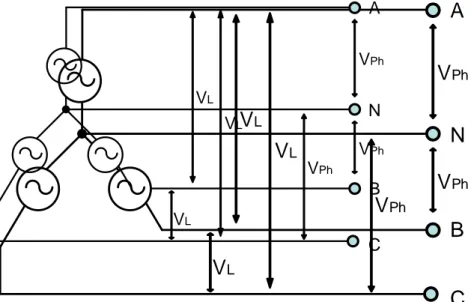
Sistem tiga fasa empat kawat adalah seperti yang terlihat pada Gambar 2.2.
V
V
Ph Ph VV
Ph Ph VV
Ph Ph VV
L L VV
L L VV
L L AA
BB
CC
NN
Gambar 2.2 Sistem Tiga Fasa Empat Kawat
Sistem tiga fasa memiliki tiga terminal beserta terminal keempat, yaitu terminal netral. Sistem ini dapat direpresentasikan dengan tiga sumber tegangan ideal yang di hubungkan dalam suatu hubungan wye, seperti yang terlihat pada Gambar 2.2, Vl merupakan tegangan antar fasa (380 V) dan Vph merupakan tegangan antara fasa dengan netral (220 V).
Sistem distribusi tegangan rendah tiga fasa empat kawat dapat menyuplai beban 3 fasa maupun 1 fasa. Suplai 1 fasa diperoleh dengan mengambil hanya salah satu konduktor fasa (A, B, atau C) dan konduktor netral (N) sebagai jalur baliknya.
2.3. Komponen-Komponen Simetris
Pada tahun 1918, C.L. Fortescue menunjukkan bahwa tiga fasor yang tidak seimbang dari sistem tiga fasa dapat dipecahkan kedalam tiga sistem fasor seimbang yang disebut [4]:
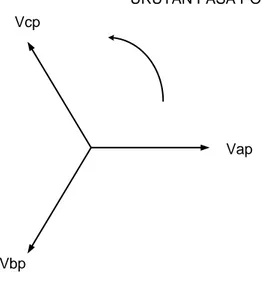
1. Komponen urutan positif. Pada sistem tiga fasa, komponen urutan-positif terdiri dari tiga buah fasor yang sama besarnya, terpisah antara satu dengan yang lain sebesar 120°, dan mempunyai urutan fasor yang sama dengan fasor aslinya seperti yang terlihat pada Gambar 2.3.
Vbp Vcp
Vap URUTAN FASA POSITIF
Gambar 2.3. Diagram Fasor Komponen Urutan Positif
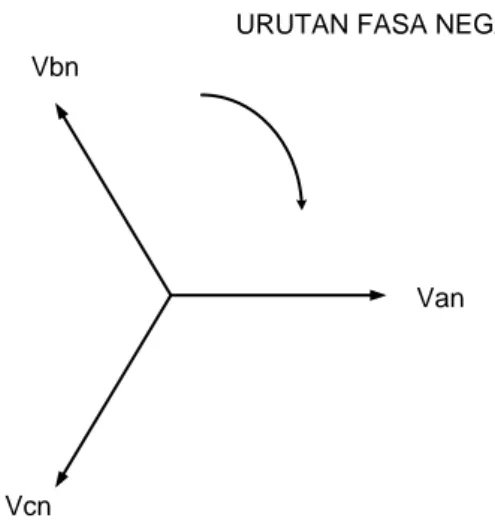
2. Komponen urutan negatif. Pada sistem tiga fasa, komponen urutan-negatif terdiri dari tiga buah fasor yang sama besarnya, terpisah antara satu dengan yang lain sebesar 120° dan mempunyai urutan fasor yang berlawanan dengan fasor aslinya seperti yang terlihat pada Gambar 2.4.
Vcn Vbn
Van URUTAN FASA NEGATIF
Gambar 2.4. Diagram Fasor Komponen Urutan Negatif
3. Komponen urutan nol. Pada sistem tiga fasa, komponen urutan nol terdiri dari tiga buah fasor yang sama besarnya dan dengan pergeseran fasa 0° antara fasor yang satu dengan yang lain seperti yang terlihat pada Gambar 2.5.
Va0, Vb0, Vc0 URUTAN FASA NOL
Gambar 2.5. Diagram Fasor Komponen Urutan Nol
Sehingga besar tegangan sebenarnya dari setiap fasa adalah penjumlahan dari masing-masing komponen simetris terbentuk Persamaan (2.1), (2.2) dan (2.3):
Va = Va0 +Vap + Van (2.1)
Vb = Vbp + Vbn + Vb0 = a2 Vap + aVan + Va0 (2.2)
Dimana 𝑎𝑎 = 1∠1200 yang digunakan untuk menunjukkan operator yang menyebabkan perputaran sebesar 120° dalam arah yang berlawanan dengan arah jarum jam.
2.4. Ketidakseimbangan Tegangan
Ketidakseimbangan tegangan menjadi fenomena yang diamati hampir diseluruh negara yang memiliki sistem tiga fasa. Meskipun tegangan yang dibangkitkan oleh generator bernilai seimbang akan tetapi pengaruh dari sistem transmisi, pembebanan yang tidak seimbang pada saat pendistribusian, transformator yang kurang baik, rusaknya pengaman lebur pada kapasitor bank tiga fasa dan lain sebagainya dapat menyebabkan tegangan yang sampai ke beban menjadi tidak seimbang.
Ketidakseimbangan tegangan adalah fenomena yang terjadi ketika nilai tegangan antara salah satu fasa dengan fasa lainnya berbeda. Ada perbedaan jenis dari ketidakseimbangan tegangan dengan kemungkinan variasi tegangan di bawah dan di atas nilai nominalnya. Sehingga ketidakseimbangan tegangan bisa diklasifikasikan menjadi OVU (Over Voltage Unbalanced) dan UVU (Under Voltage Unbalanced) [2].
OVU adalah kondisi ketidakseimbangan tegangan dimana nilai dari komponen urutan positifnya lebih besar dari nilai nominalnya. Sedangkan UVU adalah kondisi ketidakseimbangan tegangan dimana nilai dari komponen urutan positifnya lebih kecil dari nilai nominalnya.
Ada banyak kondisi ketidakseimbangan tegangan terjadi dengan VUF (Voltage Unbalance Factor) yang sama [2] yaitu:
1. 1∅ − 𝑈𝑈𝑈𝑈 (Single Phase Under Voltage Unbalance)
Adalah kondisi dimana salah satu fasa dari sistem tiga fasa bertegangan yang lebih rendah dibandingkan dengan tegangan nominalnya. Hal ini bisa saja terjadi akibat pembebanan berlebih yang menumpuk di salah satu fasa dan tidak memiliki kompensasi yang cukup.
2. 2∅ − 𝑈𝑈𝑈𝑈 (Two Phases Under Voltage Unbalance)
Adalah kondisi dimana tegangan dua dari tiga fasa bernilai lebih rendah dari nilai tegangan nominalnya. Hal ini terjadi akibat kedua fasa ini dibebani lebih dan tidak memiliki kompensasi yang cukup.
3. 3∅ − 𝑈𝑈𝑈𝑈 (Three Phases Under Voltage Unbalance)
Adalah kondisi dimana tegangan dari ketiga saluran dari sistem tiga fasa bernilai tidak seimbang dan bernilai lebih rendah dari nilai nominalnya. Hal ini terjadi akibat pembebanan yang berlebih dan pembagian bebannya yang tidak merata.
4. 1∅ −O𝑈𝑈 (Single Phase Over Voltage Unbalance)
Adalah kondisi dimana tegangan salah satu dari ketiga fasa bernilai lebih tinggi dari nilai tegangan nominalnya. Hal ini bisa saja terjadi akibat kompensasi kapasitor yang berlebihan.
5. 2∅ −O𝑈𝑈 (Two Phases Over Voltage Unbalance)
Adalah kondisi dimana tegangan dua dari tiga fasa bernilai lebih tinggi dari tegangan nominalnya. Hal ini terjadi akibat kedua fasa ini
terkompensasi berlebihan sehingga mengakibatkan naiknya tegangan pada kedua fasa ini dan mengakibatkan ketidakseimbangan terjadi.
6. 3∅ − 𝑂𝑂𝑈𝑈 (Three Phases Over Voltage Unbalance)
Adalah kondisi dimana ketiga fasa dari sistem tiga fasa mengalami ketidakseimbangan tegangan yang bernilai lebih tinggi dari tegangan nominalnya.
7. 1∅ − 𝐴𝐴 (Unequal Single Phase Angle Displacement)
Jika tegangan tiga fasa seimbang,maka seharusnya perbedaan sudut fasanya sebesar 120°. Misalkan fasa A menjadi referensinya, maka jika ada salah satu sudut fasanya tidak berbeda 120° terhadap fasa yang lain ini disebut Unequal Single Phase Angle Displacement.
8. 2∅ − 𝐴𝐴 (Unequal Two Phase Angles Displacement)
Sama seperti Unequal Single Phase Angle Displacement namun pada kondisi ini terdapat dua fasa yang berbeda terhadap fasa referensinya. VUF (Voltage Unbalanced Factor) didefinisikan oleh IEC (International Electrotechnical Commission) sebagai perbandingan antara tegangan komponen negatif dengan tegangan komponen positif seperti pada Persamaan (2.4).
𝑈𝑈𝑈𝑈𝑉𝑉= 𝑚𝑚𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑡𝑡𝑚𝑚𝑎𝑎𝑚𝑚𝑚𝑚𝑎𝑎𝑚𝑚𝑚𝑚𝑡𝑡𝑚𝑚𝑎𝑎𝑚𝑚𝑚𝑚𝑎𝑎𝑚𝑚𝑘𝑘𝑘𝑘𝑚𝑚𝑘𝑘𝑘𝑘𝑚𝑚𝑡𝑡𝑚𝑚𝑘𝑘𝑘𝑘𝑚𝑚𝑘𝑘𝑘𝑘𝑚𝑚𝑡𝑡𝑚𝑚𝑚𝑚𝑡𝑡𝑚𝑚𝑎𝑎𝑚𝑚𝑚𝑚𝑛𝑛𝑘𝑘𝑘𝑘𝑝𝑝𝑚𝑚𝑚𝑚𝑚𝑚𝑛𝑛 = ||𝑈𝑈𝑚𝑚𝑈𝑈𝑘𝑘|| 𝑋𝑋 100% (2.4)
2.5. Motor Induksi Tiga Fasa
Secara umum, motor listrik berfungsi untuk mengubah energi listrik menjadi energi mekanis yang berupa tenaga putar. Pada tugas akhir ini penulis
menggunakan motor induksi tiga fasa oleh karena itu selanjutnya yang akan dibahas adalah tipe motor ini seperti pada Gambar 2.6.
Gambar 2.6 Motor Induksi
Motor induksi seperti yang terlihat pada Gambar 2.6, merupakan motor yang banyak digunakan dikalangan industri, tentu saja hal ini berkaitan dengan keunggulan dan kekurangan dari motor ini [5].
Keunggulan dari motor ini adalah:
1. Sangat sederhana dan daya tahan kuat 2. Harga relatif murah dan perawatan mudah 3. Efisiensi tinggi
4. Tidak memerlukan starting tambahan dan tidak harus sinkron Kekurangannya adalah:
1. Kecepatan tidak dapat berubah tanpa adanya pengorbanan efisiensi 2. Kecepatan menurun seiring pertambahan beban
Motor ini bekerja dengan prinsip induksi energi listrik dari bagian stator ke bagian rotornya [6]. Berputarnya rotor pada motor induksi disebabkan oleh adanya medan putar yang dihasilkan oleh arus yang melewati masing-masing
kumparan stator. Medan putar ini terjadi apabila kumparan stator pada motor induksi dihubungkan dengan sumber jala-jala tiga fasa. Pada tugas akhir ini akan di analisis torsi dan efisiensi dari motor induksi tiga fasa dengan variasi suplai tegangan tiga fasa yang tidak seimbang dengan VUF (Voltage Unbalance Factor) bernilai sama.
2.6. Analisis Steady State
Analisis steady state [7] dari sebuah operasi motor induksi tiga fasa dengan suplai tegangan tidak seimbang dilakukan dengan menggunakan pendekatan komponen simetris dengan rangkaian ekivalen seperti yang ditunjukkan pada Gambar 2.7 dan 2.8.
Rs jXs jXm jXr Rr/(S) Ipm Ips Ipr Vp
Gambar 2.7. Rangkaian Ekivalen Motor Induksi Urutan Positif
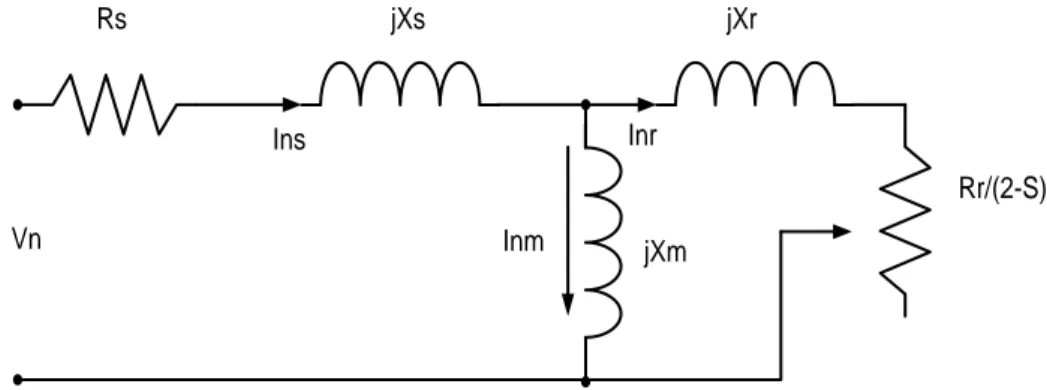
Rs jXs jXm jXr Rr/(2-S) Inm Ins Inr Vn
Gambar 2.7 dan Gambar 2.8 adalah rangkaian ekivalen perfasanya, Dimana nilai perfasanya adalah:
Vp = Tegangan urutan positif Vn = Tegangan urutan negatif Rs = Tahanan stator
Xs = Reaktansi stator
Rr = Tahanan rotor terhadap stator Xr = Reaktansi rotor terhadap stator Xm = Reaktansi magnetisasi
Zp = Impendansi urutan positif dari motor Zn = Impedansi urutan negatif dari motor Ips = Arus fasa urutan positif stator Ipr = Arus fasa urutan positif rotor Ins = Arus fasa urutan negatif stator Inr = Arus fasa urutan negatif rotor S = Slip
Misalkan tegangan fasa dari motor adalah Va, Vb, Vc, maka dapat dibuat suatu matrik persamaan hubungan antara komponen urutan positif, negatif dan nol seperti pada Persamaan (2.5) :
�𝑈𝑈𝑈𝑈𝑘𝑘0 𝑈𝑈𝑚𝑚 �=13�1 11 𝑎𝑎 𝑎𝑎12 1 𝑎𝑎2 𝑎𝑎� � 𝑈𝑈𝑎𝑎 𝑈𝑈𝑏𝑏 𝑈𝑈𝑐𝑐 � (2.5)
Dimana a = - 0.5 + 0.86603i, dan 𝑎𝑎2= - 0.5 - 0.86603i.
Analisis dari rangkaian ekivalen pada Gambar 5 dan 6 didapat Persamaan (2.6) dan (2.7) :
𝑍𝑍𝑘𝑘 = 𝑅𝑅𝑝𝑝+𝑗𝑗𝑋𝑋𝑝𝑝+ (jXm)(Rs + jXr r) Rr s + j (Xm+ Xr) (2.6) 𝑍𝑍𝑚𝑚 = 𝑅𝑅𝑝𝑝+𝑗𝑗𝑋𝑋𝑝𝑝+ (jXm)( R2−rs + jXr) Rr 2−s + j (Xm + Xr) (2.7)
Karena motor dihubungkan dengan hubungan wye tiga kawat dan tidak ditanahkan maka urutan nol dari tegangan maupun arus tidak diperhitungkan. Oleh karena itu, arus urutan positif dan negatif yang mengalir di stator dan rotor adalah seperti yang diperlihatkan pada Persamaan 2.8 hingga 2.14:
𝐼𝐼𝑘𝑘𝑝𝑝 = 𝑍𝑍𝑈𝑈𝑘𝑘 𝑘𝑘 (2.8) 𝐼𝐼𝑘𝑘𝑝𝑝 = 𝐼𝐼𝑘𝑘𝑝𝑝 × R (jXm) r s + j (Xm+ Xr) (2.9) 𝐼𝐼𝑚𝑚𝑝𝑝 = 𝑍𝑍𝑈𝑈𝑚𝑚 𝑚𝑚 (2.10) 𝐼𝐼𝑚𝑚𝑝𝑝 = 𝐼𝐼𝑚𝑚𝑝𝑝 × Rr (jXm) 2−s + j (Xm+ Xr) (2.11)
Persamaan (2.8) dan (2.9) merupakan persamaan arus stator dan rotor urutan positif dan Persamaan (2.10) dan (2.11) merupakan persamaan arus stator dan rotor urutan negatif. Sehingga didapat persamaan arus Ias, Ibs, Ics sebagai berikut:
𝐼𝐼𝑎𝑎𝑝𝑝 = 𝐼𝐼𝑘𝑘𝑝𝑝 +𝐼𝐼𝑚𝑚𝑝𝑝 (2.12) 𝐼𝐼𝑏𝑏𝑝𝑝 = 𝑎𝑎2𝐼𝐼𝑘𝑘𝑝𝑝 +𝑎𝑎𝐼𝐼𝑚𝑚𝑝𝑝 (2.13) 𝐼𝐼𝑐𝑐𝑝𝑝 = 𝑎𝑎𝐼𝐼𝑘𝑘𝑝𝑝 +𝑎𝑎2𝐼𝐼𝑚𝑚𝑝𝑝 (2.14)
Daya input dan faktor daya motor dapat dihitung dengan menggunakan komponen simetris arus dan tegangan dengan Persamaan (2.15) sampai dengan (2.17):
𝐷𝐷𝑎𝑎𝐷𝐷𝑎𝑎𝑎𝑎𝑘𝑘𝑚𝑚𝑚𝑚𝑛𝑛𝑚𝑚𝑎𝑎𝑝𝑝𝑚𝑚𝑘𝑘𝑎𝑎𝑚𝑚 (𝑃𝑃𝑚𝑚𝑚𝑚) =𝑅𝑅𝑡𝑡 [3�𝑈𝑈𝑘𝑘.𝐼𝐼𝑘𝑘𝑝𝑝∗ +𝑈𝑈𝑚𝑚𝐼𝐼𝑚𝑚𝑝𝑝∗ �] (2.15) 𝐷𝐷𝑎𝑎𝐷𝐷𝑎𝑎𝑝𝑝𝑡𝑡𝑎𝑎𝑘𝑘𝑚𝑚𝑚𝑚𝑛𝑛𝑚𝑚𝑎𝑎𝑝𝑝𝑚𝑚𝑘𝑘𝑎𝑎𝑚𝑚 (𝑄𝑄𝑚𝑚𝑚𝑚) =𝐼𝐼𝑚𝑚 [3�𝑈𝑈𝑘𝑘.𝐼𝐼𝑘𝑘𝑝𝑝∗ +𝑈𝑈𝑚𝑚𝐼𝐼𝑚𝑚𝑝𝑝∗ �] (2.16)
𝑛𝑛𝑎𝑎𝑘𝑘𝑚𝑚𝑘𝑘𝑝𝑝𝑚𝑚𝑎𝑎𝐷𝐷𝑎𝑎 (𝑘𝑘.𝑛𝑛.) =𝑐𝑐𝑘𝑘𝑝𝑝 �𝑚𝑚𝑎𝑎𝑚𝑚−1�𝑄𝑄𝑃𝑃𝑚𝑚𝑚𝑚
𝑚𝑚𝑚𝑚�� (2.17)
Dimana (*) bermakna nilai konjugat.
Jika rugi-rugi inti dan mekanis diabaikan, daya keluaran dari motor ditunjukkan dengan Persamaan (2.18) sampai dengan (2.20) :
𝑃𝑃𝑘𝑘 = 3𝐼𝐼𝑘𝑘𝑝𝑝2 �1− 𝑝𝑝𝑝𝑝 � 𝑅𝑅𝑝𝑝 (2.18)
𝑃𝑃𝑚𝑚 = 3𝐼𝐼𝑚𝑚𝑝𝑝2 �𝑝𝑝 −2− 𝑝𝑝� 𝑅𝑅1 𝑝𝑝 (2.19)
𝑃𝑃𝑘𝑘𝑚𝑚𝑚𝑚 = 𝑃𝑃𝑘𝑘 +𝑃𝑃𝑚𝑚 (2.20)
Dimana Pn pada keadaan normal adalah bernilai negatif karena rotor berputar pada arah yang berlawanan dengan medan magnet yang dihasilkan oleh komponen urutan negatif.
Torsi yang dihasilkan oleh komponen urutan positif dan negatif ditunjukkan oleh Persamaan (2.21) hingga (2.22):
𝑇𝑇𝑘𝑘 = 𝜔𝜔𝑃𝑃𝑘𝑘 𝑚𝑚 = 3𝐼𝐼𝑘𝑘𝑝𝑝2 𝑅𝑅𝑝𝑝 𝑝𝑝𝜔𝜔𝑝𝑝 (2.21) 𝑇𝑇𝑚𝑚 = 𝜔𝜔𝑃𝑃𝑚𝑚 𝑚𝑚 =− 3𝐼𝐼𝑚𝑚𝑝𝑝2 𝑅𝑅𝑝𝑝 (2− 𝑝𝑝)𝜔𝜔𝑝𝑝 (2.22)
Dimana 𝜔𝜔𝑚𝑚 adalah kecepatan sudut rotor, dan 𝜔𝜔𝑝𝑝 adalah kecepatan sinkron. Maka torsi keluaran dari motor ditentukan oleh Persamaan (2.23):
𝑇𝑇= 𝑇𝑇𝑘𝑘 +𝑇𝑇𝑚𝑚 =3𝜔𝜔𝑅𝑅𝑝𝑝 𝑝𝑝 � 𝐼𝐼𝑘𝑘𝑝𝑝2 𝑝𝑝 − 𝐼𝐼𝑚𝑚𝑝𝑝2 2− 𝑝𝑝� (2.23)
Maka efisiensi motor dapat dihitung menggunakan Persamaan (2.24) : 𝜂𝜂 =𝑃𝑃𝑃𝑃𝑘𝑘𝑚𝑚𝑚𝑚
𝑚𝑚𝑚𝑚 × 100% (2.24)
2.7. Perangkat Lunak Matlab
Matlab adalah bahasa pemrograman level tingkat tinggi yang di khususkan untuk komputasi teknis. Bahasa ini mengintegrasikan kemampuan komputasi, visualisasi dan pemrograman dalam sebuah lingkungan yang tunggal dan mudah digunakan.
Matlab dikembangkan oleh MathWork Inc. Pada Tugas Akhir ini, Matlab digunakan sebagai alat simulasi untuk melihat pengaruh ketidakseimbangan tegangan terhadap kecepatan motor, selanjutnya dibuat dan digunakan suatu program untuk membantu mempersingkat waktu perhitungan.