PENDAHULUAN
Latar Belakang
Pollution Standards Index (PSI), yang digunakan untuk mengukur polusi udara di Singapura, naik tajam ke rekor 400, jauh lebih tinggi dari 226 yang dicatat selama kebakaran hutan besar-besaran tahun 1998 dan jauh lebih tinggi dari 100 yang diizinkan. dapat diterima sebagai udara "sehat". kualitas. Hal lain yang lebih memprihatinkan adalah jumlah korban jiwa akibat kebakaran hutan tersebut. Data dari BNPB menyebutkan 10 orang meninggal dunia akibat kabut asap di Sumatera dan Kalimantan, baik dampak langsung maupun tidak langsung. Selama ini kebakaran hutan dipadamkan dengan cara konvensional dengan menarik selang dan memadamkan api dengan semprotan.
Pada skala yang lebih besar dan di area yang lebih ekstrim, pemadaman dilakukan dengan pesawat khusus yang membawa kantong berisi air dan menumpahkannya ke titik api untuk memadamkan beberapa titik api. Pada penelitian ini, kami bertujuan untuk mengembangkan dan membangun sebuah quadcopter yang dapat digunakan untuk mencari titik koordinat hotspot dengan menggunakan perangkat GPS. Pengembangan ke depan dalam penelitian adalah dengan memantau wabah dengan kamera dan menggunakan quadcopter sebagai media untuk mengangkat kantong air yang akan digunakan untuk memadamkan wabah.
Rumusan Masalah
TINJAUAN PUSTAKA
Definisi Quadcopter
Gerakan ini dapat dilakukan dengan menambah atau mengurangi kecepatan salah satu baling-baling kiri atau kanan. Gerakan ini dapat dilakukan dengan menambah atau mengurangi kecepatan salah satu baling-baling depan atau belakang. Quadcopter juga dapat terbang secara vertikal, yang artinya tidak membutuhkan landasan pacu untuk terbang.
Selain itu, quadcopter juga dapat bergerak ke delapan penjuru dunia tanpa harus memutar badan terlebih dahulu. Keunggulan lainnya adalah quadcopter memiliki baling-baling yang relatif kecil, sehingga lebih aman digunakan untuk pekerjaan yang melibatkan interaksi dengan objek terdekat. Quadcopters lebih sederhana dalam hal konstruksi, pemeliharaan, dan perbaikan daripada helikopter standar.
![Gambar 1. Gerakan dasar Quadcopter [7]](https://thumb-ap.123doks.com/thumbv2/123dok/10182151.0/8.892.334.650.518.754/gambar-gerakan-dasar-quadcopter.webp)
Sistem Kendali
Transduser menyediakan suatu besaran yang dapat diukur, kemudian besaran tersebut dapat diproses oleh bagian proses, dapat berupa rangkaian kendali dengan menggunakan peralatan yang disusun secara elektrik atau berupa sistem kendali yang dapat diprogram, misalnya mikroprosesor, mikrokontroler atau sistem PLC [8]. Pemrosesan informasi (sinyal masukan) menghasilkan sinyal keluaran yang kemudian digunakan untuk mengaktifkan aktuator (peralatan keluaran) yang dapat berupa motor listrik, kontaktor, katup solenoid, lampu dan sebagainya. Sistem kontrol dibagi menjadi dua, yaitu sistem kontrol loop terbuka dan sistem kontrol loop tertutup.
Jenis-jenis Pengontrolan
Sistem kontrol loop tertutup adalah sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung pada aksi kontrol. Jadi sistem kontrol loop tertutup adalah sistem kontrol umpan balik (yang dapat berupa sinyal keluaran atau fungsi dari sinyal keluaran dan turunannya), dibandingkan dengan pengontrol untuk meminimalkan kesalahan dan membuat keluaran sistem mendekati yang diinginkan. nilai.
Komponen Quadcopter
Spesifikasi yang harus dipenuhi oleh sistem gerak ini adalah torsi, efisiensi dan getaran yang ditimbulkan oleh putaran motor dan baling-baling. Baling-baling ini mentransmisikan daya dengan mengubah gerak putar menjadi daya dorong untuk menggerakkan kendaraan seperti pesawat terbang melalui massa seperti udara dengan memutar dua atau lebih bilah kembar dari poros utama[12]. Semakin panjang diameter dan nada baling-baling, semakin banyak udara masuk dan semakin besar daya dorongnya.
Lebih banyak bilah pada baling-baling menyebabkan lebih banyak udara naik, menghasilkan lebih banyak daya dorong. Dengan arah dorong yang sama, baling-baling aeromodel RC memiliki dua jenis arah putaran; searah jarum jam (CW) dan berlawanan arah jarum jam (CCW). Quadcopter membutuhkan sepasang baling-baling CW dan CCW agar momen osilasi dapat saling membatalkan.
ESC yang digunakan adalah tipe brushless, terdiri dari susunan MOSFET (Metal Oxide Semiconductor Field Effect Transistor) untuk mengatur kecepatan motor brushless.
![Gambar 5. Rangka Quadcopter[9]](https://thumb-ap.123doks.com/thumbv2/123dok/10182151.0/12.892.341.597.126.365/gambar-rangka-quadcopter.webp)
Pemodelan Quadcopter
GPS adalah jaringan satelit yang memungkinkan pengguna menentukan garis lintang, garis bujur, dan (jika berlaku) ketinggian di atas atau di bawah permukaan laut. Penerima GPS terdiri dari komputer yang menghitung jarak line-of-sight dengan 4 satelit berbeda secara bersamaan. Pelacakan GPS bekerja dengan menggunakan jaringan GSM dan GPS untuk menentukan koordinat suatu objek dan menyajikannya dalam bentuk peta digital.
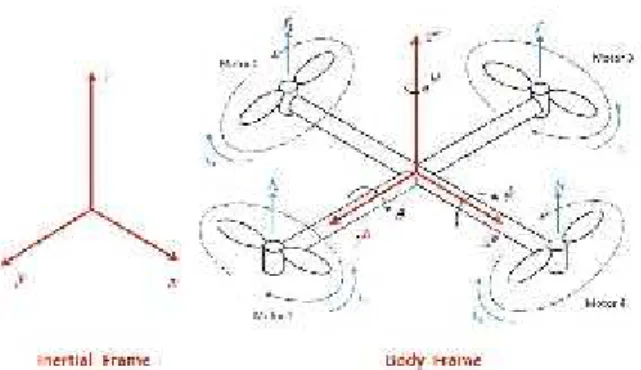
Kerangka dasar diberikan oleh E = {xE,yE, zE} di mana xE menunjuk ke utara, yE menunjuk ke timur dan sumbu zB menunjuk ke atas. Kerangka tubuh dilambangkan dengan B = {xB, yB, zB} dengan xB menunjuk ke depan, yB. Sikap quadcopter ditentukan oleh orientasi sumbu tubuh terhadap sumbu bumi.
Sikap ini ditampilkan secara bergilir pada sumbu x, y dan z yang terdiri dari roll, pitch dan yaw. Misalnya, jika Anda ingin memutar Quadcopter secara mantap searah jarum jam, putaran tiga motor berlawanan arah jarum jam (motor 2, 4 dan 6) dipercepat dan sekaligus putaran tiga motor searah jarum jam (motor 1, 3 dan 6). 5) diperlambat. Pitch dicapai dengan menurunkan/menambah kecepatan motor 1 dan 6 dan menurunkan/meningkatkan kecepatan motor 3 dan 4 secara bersamaan.
Sebagai contoh, jika percepatan pada sumbu x, y, dan z diukur pada rangka benda, maka untuk mendapatkan percepatan pada kerangka bumi, pengukuran percepatan ditempatkan pada matriks kolom dan dikalikan dengan matriks rotasi, accelEarth= RBaccelBody . Menggunakan formalisme Newton-Euler untuk mendeskripsikan dinamika benda yang dipengaruhi oleh gaya dan momen eksternal. FB = gaya yang bekerja pada rangka bodi quadcopter (N) τB = momen yang bekerja pada rangka bodi quadcopter (Nm) 03x3 = matriks 0 (nol) ukuran 3x3.
Gaya dorong adalah gaya angkat total yang dihasilkan oleh semua baling-baling dan selalu diarahkan sepanjang sumbu z. Dalam penerbangan, gaya ini dapat ditemukan dengan persamaan (9), di mana b adalah konstanta gaya dorong (Ns2). Gesekan udara (hambatan udara) sebanding dengan kuadrat kecepatan, ukuran dan bentuk benda menurut persamaan (11).
TINJAUAN DAN MAMFAAT PENELITIAN
Tujuan Penelitian
Selain itu, motor tanpa sikat dan baling-baling dipasang di setiap sisi bingkai quadcopter, setelah memasang ESC dan menghubungkannya ke pengontrol penerbangan dan baterai yang disertakan. Pengukuran momen inersia body harus dihitung untuk mengetahui pemilihan komponen yang digunakan, karena momen inersia quadcopter dipengaruhi oleh massa, ukuran dan letak masing-masing komponen penyusunnya. Solder semua motor brushless dengan kabel yang lebih panjang dengan soket untuk koneksi ke ESC.
Setelah perakitan quadcopter, perlu dilakukan pengujian berupa uji terbang berdasarkan spesifikasi sistem yang telah dibuat. Tujuan dari pengujian ini adalah untuk membuktikan apakah sistem yang akan diimplementasikan memenuhi spesifikasi yang direncanakan sebelumnya atau tidak. Hasil pengujian ini akan dan akan dijadikan tolak ukur keberhasilan frame yang telah dirakit dan diproduksi.
Pengujian ini dilakukan untuk memastikan bahwa program penerbangan manual dengan menggunakan remote control dapat berjalan dengan baik Salah satu gambaran pada saat pengujian penerbangan manual ditunjukkan pada Gambar 5.2. Momen inersia putar JTP (Nms2) adalah momen inersia yang dibutuhkan oleh komponen-komponen yang berputar, yaitu baling-baling dan rotor mesin, relatif terhadap poros baling-baling. Untuk menghitung momen inersia rotasi, baling-baling dimodelkan sebagai balok tipis, inersia rotasi baling-baling terhadap sumbu baling-baling.
Uji terbang dilakukan untuk mengetahui kondisi quadcopter yang dikendalikan secara manual dengan remote control. Sehubungan dengan penelitian yang dilakukan terhadap berbagai saran yang mungkin dapat diberikan kedepannya, maka saran tersebut antara lain: 1 18 April 2016 Pencairan Dana Penelitian Pada tahap awal penelitian, 70% dari total anggaran yang telah ditetapkan akan dicairkan.
5 29 Juni 2016 Perakitan komponen mekanik Komponen yang dibeli, disiapkan dan dirakit sesuai dengan proyek yang dibuat sebelumnya. 9 July 6, 2016 Quadcopter Flight Test Quadcopter yang telah dirakit kemudian diuji untuk memastikan sistem bekerja dan bekerja dengan baik.
Manfaat Penelitian
METODOLOGI PENELITIAN
Waktu dan Tempat Penelitian
Lokasi pelaksanaan kegiatan penelitian dibagi menjadi dua yaitu perakitan dan pengujian, dan pengambilan data dilakukan di Bengkel Teknik Mesin Politeknik Negeri Ujung Pandang. Sedangkan analisis dan perhitungan data akan dilakukan di bengkel Teknik Mesin Alat Berat Politeknik Negeri Balikpapan.
Alat dan Bahan
Sebelum membuat dan merakit alat dilakukan persiapan terlebih dahulu berupa perancangan model model quadcopter yang akan dibangun dengan menggunakan software AutoCad dan Inventor. Quadcopter diterbangkan untuk mengetahui kemampuan terbang menggunakan remote control, kemampuan menerbangkan quad berupa throttle atau pitch, roll, pitch dan yaw. Kemudian digambar menggunakan perangkat lunak Autocad untuk memudahkan proses perancangan bentuk dan sistem mekanik.
Pada bagian mekanik terdiri dari empat lengan quadcopter yang membentuk rangka utama quadcopter yang berfungsi sebagai alas dan tempat untuk brushless motor dan propeller, bagian yang memberikan daya dorong saat quadcopter beroperasi. Memasang motor tanpa sikat dengan lengan boom, dudukan motor atas dan bawah, serta roda pendaratan. Rancangan rancangan dibuat dengan menggunakan software gambar dan simulasi SolidWork, rancangan yang dibuat dapat digunakan untuk analisa lebih lanjut mengenai fenomena yang terjadi pada quadcopter ketika diberikan atau dikenai gaya.

Desain Kerja
HASIL YANG DICAPAI
Desain Model Quadcopter
Uji Terbang Quadcopter
Keluaran dari modul penerima ini adalah sinyal 50Hz dengan lebar pulsa minimum 1 ms dan lebar pulsa maksimum 2 ms. Besarnya sinyal ini akan diterjemahkan oleh mikrokontroler yang kemudian menjadi acuan pergerakan pada quadcopter. Receiver ini merupakan sepasang remote control merk Turnigy 9X yang memiliki 9 channel, namun yang digunakan hanya 5 channel yaitu throttle, roll, pitch, yaw dan auto (untuk merubah mode pilot atau mode auto), output dari receiver yang digunakan . adalah 5 saluran.
Momen Inersia Body dan Rotasional Quadcopter
Penyusunan proposal terkait kebutuhan penelitian, beberapa data terkait digunakan sebagai dasar penyusunan proposal penelitian internal skema pendanaan DIPA Poltekba. 3 27 Juni 2016 Pembelian Komponen Tahap 1 Pembelian beberapa komponen mekanik (komponen utama) Komponen yang dimiliki pada tahap ini antara lain rangka, motor brushless, ESC dan baling-baling, serta remote, baterai dan adaptor. 4 27 Juni 2016 Pembelian Komponen Tahap 1 Pembelian Lebih Banyak Komponen Mekanik (Komponen Utama) Komponen yang dimiliki pada tahap ini meliputi rangka, motor brushless, ESC dan baling-baling, serta remote, baterai dan adaptor.
Komponen pada tahap ini meliputi APM, GPS + kompas, konektor XT60, Ublox NED 6M/7M, dudukan GPS yang dapat dilipat, dan OSD minimal. Judul Penelitian: Perancangan Quadcopter Sebagai Alat Pemantau Titik Koordinat Kebakaran Menggunakan GPS Sebagai Upaya Penanggulangan Kebakaran Hutan.

KESIMPULAN DAN SARAN
Kesimpulan
Saran
![Gambar 3. Sistem Kontrol lup terbuka [8]](https://thumb-ap.123doks.com/thumbv2/123dok/10182151.0/10.892.197.739.790.885/gambar-sistem-kontrol-lup-terbuka.webp)
![Gambar 4. Sistem Kontrol lup tertutup [8]](https://thumb-ap.123doks.com/thumbv2/123dok/10182151.0/11.892.194.753.373.579/gambar-sistem-kontrol-lup-tertutup.webp)
![Gambar 6. Rangka Quadcopter[11]](https://thumb-ap.123doks.com/thumbv2/123dok/10182151.0/13.892.338.603.787.1017/gambar-rangka-quadcopter.webp)

![Gambar 8. Propeller dengan berbagai bilah[13]](https://thumb-ap.123doks.com/thumbv2/123dok/10182151.0/15.892.208.674.556.753/gambar-propeller-dengan-berbagai-bilah.webp)

![Gambar 10. KK 2.1.5 Multi-Rotor control Board[16]](https://thumb-ap.123doks.com/thumbv2/123dok/10182151.0/18.892.310.630.130.317/gambar-kk-multi-rotor-control-board.webp)
![Gambar 11. Baterai [17]](https://thumb-ap.123doks.com/thumbv2/123dok/10182151.0/18.892.359.622.843.1032/gambar-baterai.webp)
