Prototype Kapal Selam Untuk Monitoring S
Teks penuh
Gambar



Garis besar
Dokumen terkait
Pada running software CFD akan dapat dengan jelas diketahui bentuk pola aliran dan tekanan kapal selam serta kocakan air yang terjadi pada permukaan bebas di tanki
Sesuai dari tampilan hasil output CFD- Post sebagaimana dapat dilihat pada gambar 13, 14 dan 15 bisa disimpulkan dari ketiga output tersebut bahwa kapal selam dengan
Kontrol PID ( Proportional Integral Derivative) yang digunakan pada robot kapal selam ini berfungsi untuk mempertahankan posisi pada kedalaman tertentu dan mengatur
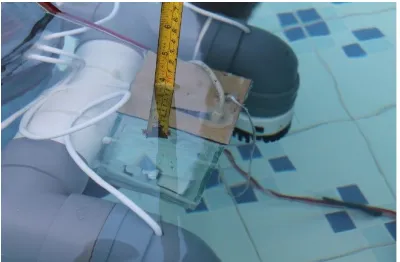
Pengujian dilakukan dengan cara mengukur berapa waktu yang dibutuhkan ROUV untuk tenggelam hingga kedalaman 1 m sejak air dimasukkan ke tabung ballast dan berapa waktu yang
Tujuannya adalah memiliki kekuatan kapal selam dengan jumlah dan kemampuan yang sesuai dengan kebutuhan strategis Indonesia, didukung oleh industri domestik dengan
Kontrol PID ( Proportional Integral Derivative) yang digunakan pada robot kapal selam ini berfungsi untuk mempertahankan posisi pada kedalaman tertentu dan mengatur
Untuk pengujian per blok prototype kapal, simulasi kebocoran air dengan cara menuangkan air kedalam salah satu blok kapal, maka water level sensor yang ada didalam blok
Sesuai dari tampilan hasil output CFD- Post sebagaimana dapat dilihat pada gambar 13, 14 dan 15 bisa disimpulkan dari ketiga output tersebut bahwa kapal selam dengan
