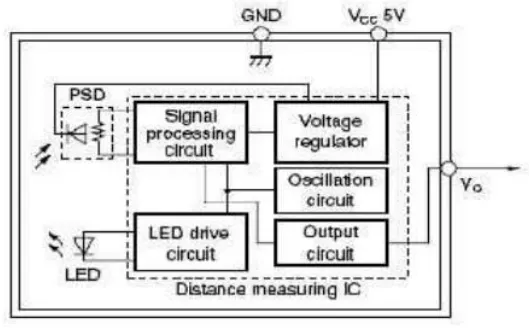
4 BAB II TINJAUAN PUSTAKA 2.1 Sharp Distance Sensor GP2Y0A02YK0F
Teks penuh
Gambar



Dokumen terkait
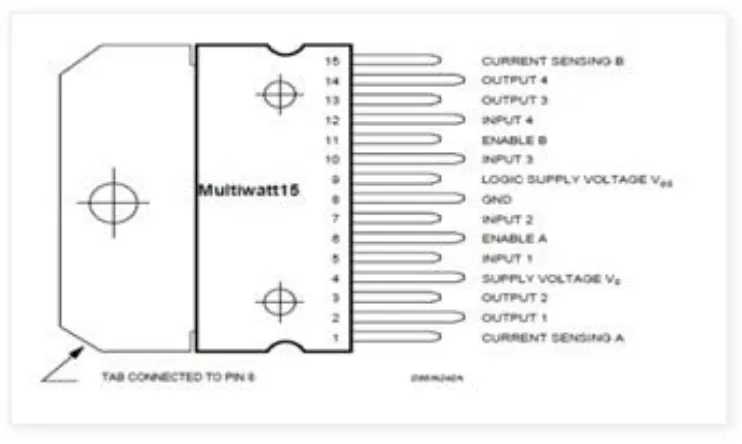
Untuk membuat Driver Motor DC dengan teknik H-Bridge menggunakan IC L293D seperti pada artikel “ Driver Motor DC H-Bridge Dengan IC L293D ” ini dapat dirakit pada PCB
Pada robot Lego Mindstroms EV3, motor yang dipakai adalah motor DC servo yang dilengkapi dengan sebuah encoder yang berfungsi sebagai umpan balik, sehingga pusat pengendalian
Untuk membuat Driver Motor DC dengan teknik H-Bridge menggunakan IC L293D seperti pada artikel “ Driver Motor DC H-Bridge Dengan IC L293D ” ini dapat dirakit pada PCB
Hampir sama dengan rangkaian internal pada modul input tegangan DC , pada input tegangan AC ini juga digunakan dioda pemancar yang dipasang antiparalel untuk melewatkan
Apabila LED (Light Emitting Dioda) dialiri arus lebih besar dari 20 mA maka LED akan rusak, sehingga pada rangkaian LED dipasang sebuah resistor sebgai
Seperti yang sudah dijelaskan pada uraian di atas bahwa adaptor adalah sebuah rangkaian elektonika yang berfungsi untuk merubah arus AC menjadi arus DC dengan
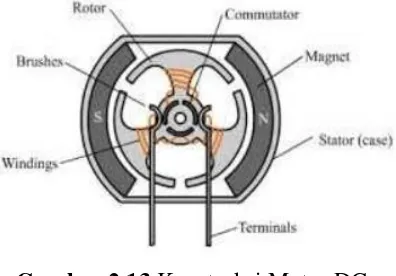
Berbeda dengan motor DC dan motor Stepper, motor servo adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan kembali ke
Motor induksi merupakan motor listrik arus bolak balik (ac) yang paling luas digunakan, Penamaannya berasal dari kenyataan bahwa motor ini bekerja berdasarkan induksi
