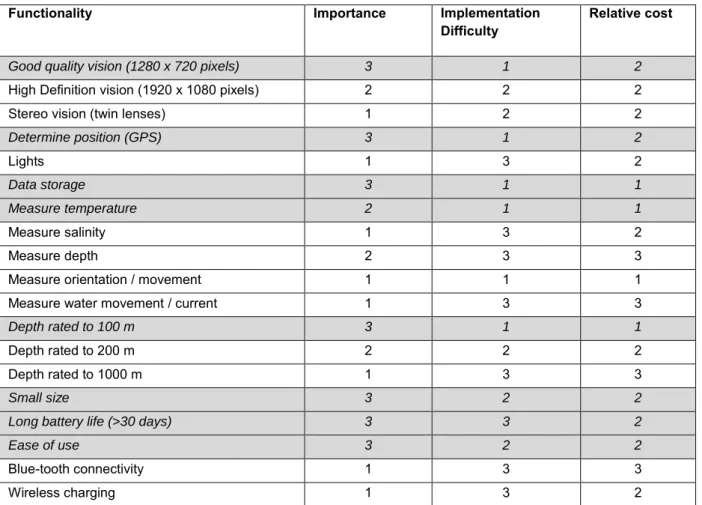
List the potential functionality of the POTBot and their associated importance, cost and difficulty of implementation. The costs associated with collecting the two sets of data were also compared.
Recommendations
The habitat information collected provided a map of the key habitats exploited by fishers across the WCRLMF and is currently being used to validate fishery-wide habitat maps developed based on the results of a previous FRDC project (2008/013). . These projects led directly to the re-certification of the MSC for the lobster fishery, which for the first time became free of any conditions under Principle 2 (Minimizing environmental impact: What are the impacts? The fishing activity must be carefully managed so that other species and habitats within ecosystems remain healthy).
Keywords
This comparison shows that the use of POTBotts can produce habitat maps much more cheaply than can be produced based on the more traditional techniques of towed video and trap camera, especially if an area is going to be fished for a separate purpose (e.g. fisheries survey ). Furthermore, the comparison with a BRUV whale project suggests that the monitoring of marine fauna can also be carried out using POTBots at a fraction of the cost, as long as the area of study is shared with a commercial fishery that is willing to use the POTBot to adopt fishing program.
Introduction
Ultimately, increased knowledge of the interactions between the environment and exploited species will promote more holistic and adaptive fisheries management. A thorough understanding of the relationships between benthic habitats, the exploited species and the fisheries they support increases the capacity for fisheries management to be ecologically sustainable and adaptive in the face of climate change and spatial zoning.
Objectives
In the case of the Western Rock Lobster, this research ensures continued MSC certification by addressing the requirement that "the nature and distribution of habitats important to fishing operations is known". This technology is transferable to other fisheries and has particular application to data-poor fisheries.
Methods/Results
POTBot functionality
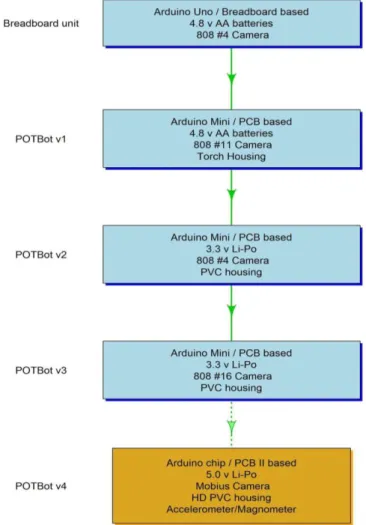
From the review process it was considered possible that a base model could be developed that quite easily contained all high priority features (grey rows in Table 1). The initial model included the capabilities of the functions marked by the gray rows in Table 1 (POTBot v1).
POTBot development .1 Initial design
- Component Choice
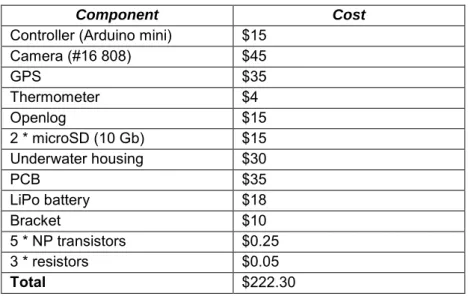
Of the options available, it was initially clear that one of the many available microcontrollers was a good option with the open source nature of their software and large communities offering online scripting help. The very small footprint of the Arduino Mini, its low price (~$15) and its ability to run on either 3.3 or 5v made this board our choice to control the POTBot v1 (https://www.arduino.cc/en / Main/arduinoBoardMini). However, due to the mini's small size and design, an Arduino Uno (https://www.arduino.cc/en/Main/ArduinoBoardUno) was initially used for the development and solderless bread boarding of POTBot v1 (Plate 1; a board containing a number (+50) of interconnected pins that allow easy connection of a variety of wires/components: see https://en.wikipedia.org/wiki/Breadboard for more information on breadboards).
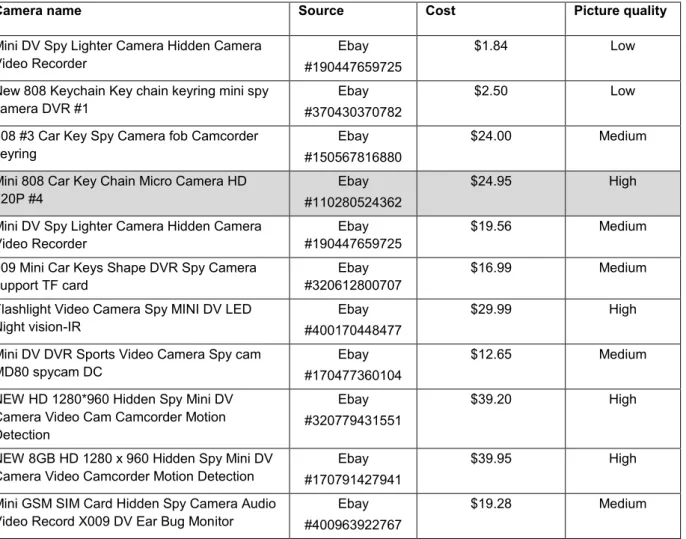
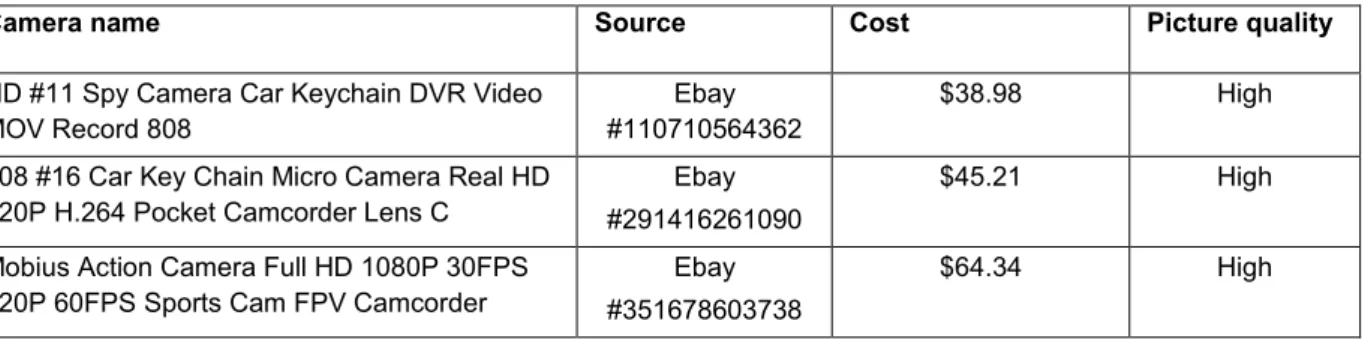
The main features of the Uno that made it more suitable for the development stage were its pin structure which did not require soldering (main pins are pre-built) and the easier serial connection of the Uno to the computer for two-way communication (uploading software and receiving Arduino output). The advantages of these camera units were that they were all very cheap and small (<50mm long and <10mm thick), they included very advanced post-processing software to compress large video files and store all the footage on small microSD cards, they all use 3 .3 v power sources (generally can handle from 3 – 5 v) and their use is simplified (minimal button presses to start and stop video recording). The only real limitation of these cameras was the quality of some of the device's recordings (although they were described as 1280 x 720 px).
Of the twelve spy cameras tested, the Mini 808 Car Key Chain Micro Camera HD 720P #4 was chosen for integration into POTBot v1 due to its good quality video and low price ($25). This camera can be controlled by the microcontroller board by soldering two wires to opposite poles of each of the two switches and allowing the controller to "connect" these wires to repeat a press of the switch (Plate 1). Although it is not true 1280 x 720 px (the frame is upscaled from 640 x 480 px with interpolation to appear to be 1280 x 720 px), the quality of the video was more than adequate, especially for the development phase.
Breadboard linking power to an integrated circuit and an 808 camera, using a signal relay to connect a junction across the shutter button on the camera (paired white wires) (photo from
Placement in a lobster pot
7 clamps were attached to the back of the lobster pots using stainless steel butterfly nuts (Plate 3). This positioning gave the cameras an unobstructed view of the surroundings as the jar descended and meant that the unit was approximately 400mm above the seabed when the jar sank to the bottom.
Schematic of a lobster pot showing the location of the POTBot
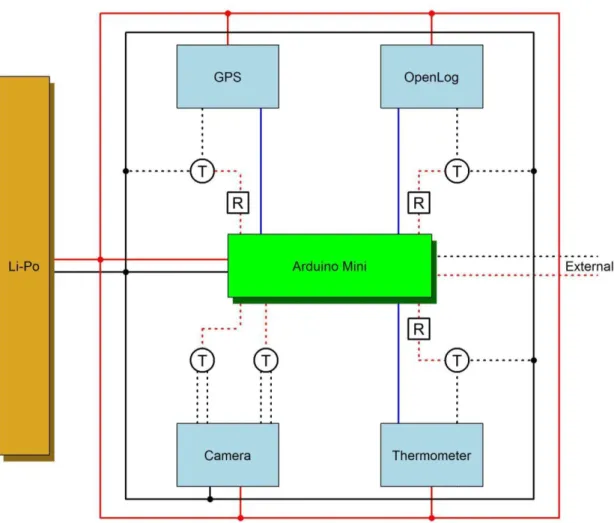
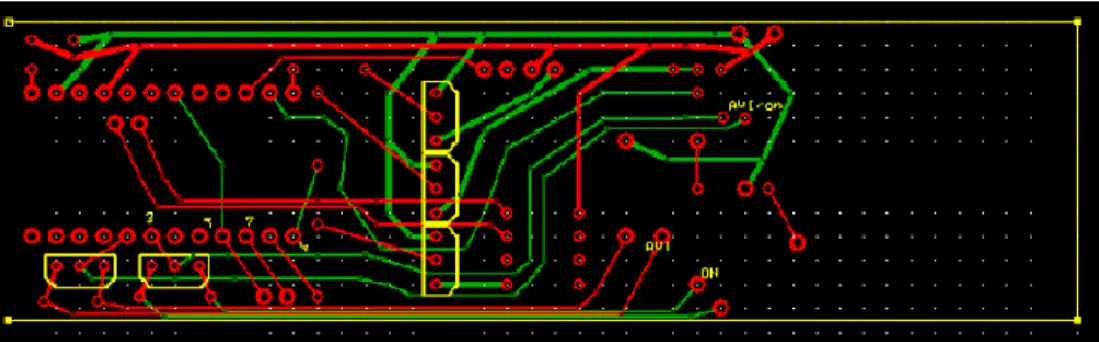
Physical layout and construction
POTBot built on purpose-made PCB (green) with camera at the front, GPS visible towards the back and battery and Arduino mini located under the PCB; PVC underwater housing capable of deployments
Programming
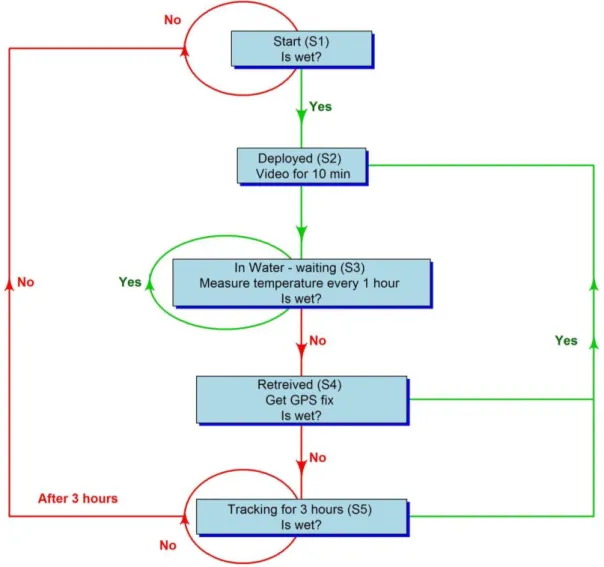
The initial state (S1) cycles the controller in and out of sleep mode every 2 seconds (to save power) and, when awake, tests for input from the external pins to detect the presence of water. When detected, the controller tests again for water, three successful consecutive detections switches the unit to state two (S2) and activates the camera for 10 minutes. In this state it alternates between sleep and testing the environment, with continuous detection of water keeping the unit in S3.
A one hour delay is used to allow the unit to adjust to the temperature of the surrounding environment. The unit records the temperature along with the time and date (the latter two data from its internal memory). In S4, the POTBot starts the GPS unit and continues to test for the presence of water.
After obtaining a GPS fix, the device records its current location (pickup location) and enters state five (S5) when tracking its location for up to three hours (Figure 4). If the device detects water, it returns to S2 and records the most recent location (deployment location). If the headway (in S5) exceeds three hours, the unit re-enters S1 (it is assumed that if it is not redeployed after three hours, the pot will not be redeployed for a significant amount of time and . follow the unit to getting the next deployment location will consume too much power).
Objective 2. Trial implementation of system by industry to test concept
- Performance of POTBot v2 and 3
- Comparison of habitat mapping at the Leeman Closed area
- Comparison of visual-based fin-fish monitoring
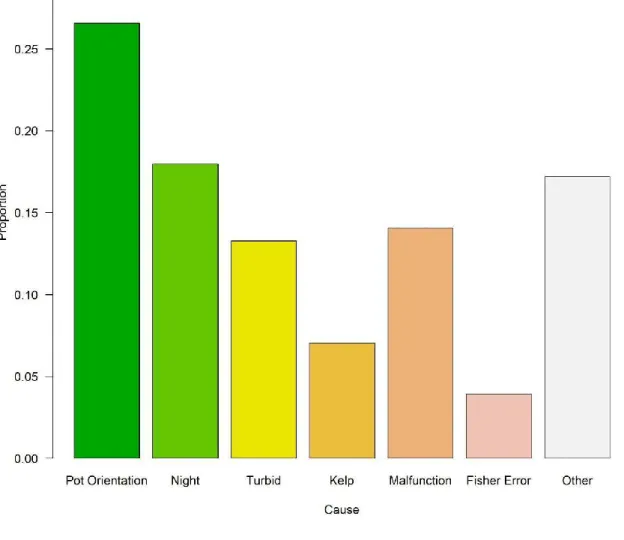
In 21% of the deployments, the quality of the vision was not suitable to classify the habitat. The most common cause of poor quality footage was the orientation of the jar when it landed on the seabed (Figure 6). This method assigned a probability of habitat type to each unknown 1 m2 of the Leeman closed area based on the.
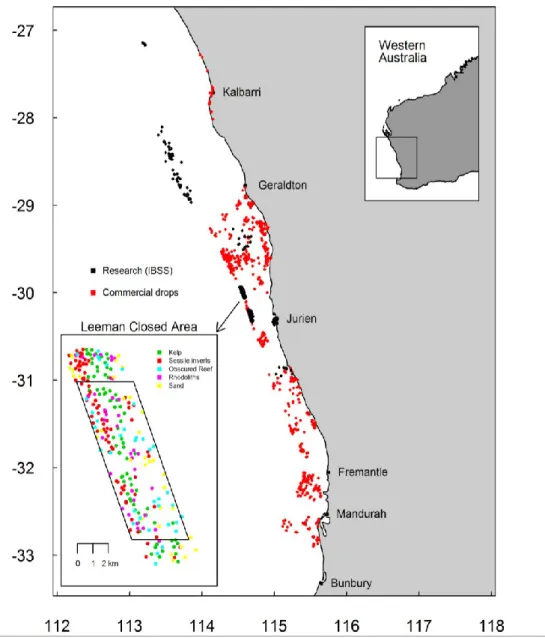
The greater the distance between the known and the estimated point, the lower the influence of the known point on determining the habitat. Comparisons between the high quality habitat map and lower quality maps (produced by POTBot or drag/drop sampling) were made by selecting 50 random locations from each of the lower quality habitat maps. The POTBot habitat data collected for this region was obtained by placing units in research pots fished as part of a lobster sampling project.
This dataset has been compared to that of drop camera (Langlois et al., 2016) and tow video surveys (Hovey et al., 2012) conducted in this region as part of the marine mapping program. Both series of studies provided good coverage of the study area at Leeman (Figure 7), although this is the case. Both datasets contain enough points to create habitat maps of the entire Leeman closed area (Figure 8).
Discussion
- Objective 1: Development of a cost-effective system for obtaining geo-referenced environmental information
- Objective 2: Trial implementation of system by industry to test concept
- Objective 3: Cost-benefit analysis with conventional ground- truthing techniques
Detecting the recovery process also allows the GPS to be started earlier than before, allowing for a faster fix when the system breaks the surface and thus a better estimate of the installation location. The device's ability to sense movement will also allow for reduced power consumption when on the surface. The observed habitats in most of the collected videos have been analyzed based on their percentage contribution.
Trial implementation of POTBot has highlighted the various limitations of the devices which most often led to poor recordings being obtained. The main causes of problems were the location of the pot on the seabed, setting up at night and camera errors. The fourth version of POTBot aims to improve the performance of the system as well as to make it more user-friendly to both construct and adjust the programming.
To adjust the parameters that control the behavior of the system, the software must be reloaded through the Arduino software. For example, in order to adjust the time duration of the captured video in the future, the microSD card must be removed from the POTBot and connected directly to a computer. The future version (v4) of the POTBot is expected to be ready by the end of 2017.
Conclusion
- Implications
- Recommendations
- Further development
- Extension and Adoption
- Project Coverage
- Project Materials Developed
Since the completion of the project, work has continued, in collaboration with the University of Western Australia's School of Electrical, Electronic and Computer Engineering, on the development of an improved POTBot model that will be stronger, have increased capabilities and will be more user. friendly. It is planned that the schematics of this model will be freely available for use by other research organizations. Two additional documents are currently under construction, and further documents will be developed as more data is collected.
Preliminary details of the project have been communicated to both national and international audiences, including ecologists, stock assessment researchers and fisheries managers, with a presentation "POTBot: A cost-effective approach to habitat mapping". The initial results of the project have been communicated in a poster presentation "An Industry-Based Approach to Regional-Scale Monitoring of Benthic Ecosystems" presented at both. Details of the project have also been disseminated widely within FD and nationally within CSIRO.
As a result, the project received wide coverage on television (Channel 10), radio (ABC Rural; 6PR) and online media (below). Details of the project are also distributed in the Department's email newsletter WA Fish eNews ed.), which has a targeted subscription of over 600, including many commercial fishermen. An updated video will be posted before the end of the project http://www.youtube.com/user/fisherieswa/feed.
Appendix 1
Appendix 2
- POTBot code