I would also like to thank all the faculty members of the Department of Electrical and Electronics Engineering, Bangladesh University of Engineering and Technology. In particular, the proposed tracking method uses the concept of multiple vehicle key frame (KVF) numbers for each of the vehicle objects in traffic. -axis coordinate of the center of the TSI object point in the nth TSI Y-axis coordinate of the center of the TSI object point in the nth TSIs.
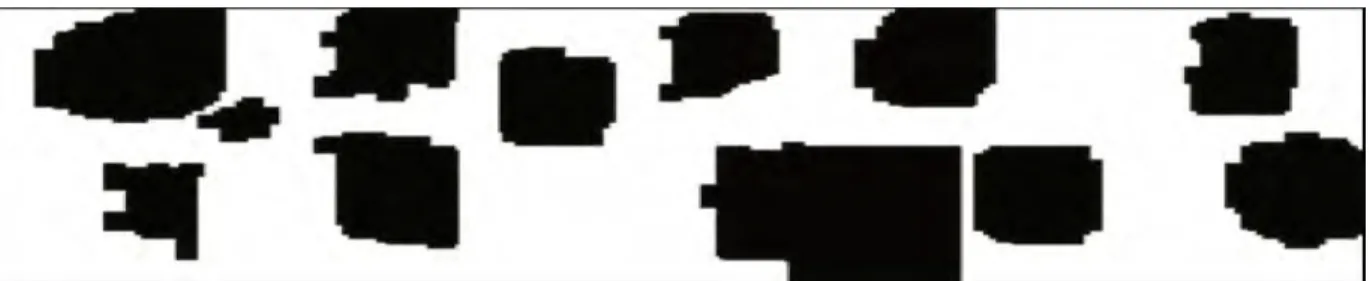
Difference in pixel position between two consecutive VDLs in a frame Resolution of the video in meters per pixel. -axis coordinate of the vehicle's center position on the frame Y-axis coordinate of the vehicle's center position on the frame. 9 Figure 2.4: Binary masks of the TOBs are obtained using two consecutive morphological masks. closing operations, first with line object L5 and then with square object S7. a) Center and width of TOB provided in TSI. the coordinates of the y-axis and between which the vehicle passes.
INTRODUCTION
- Introduction
- Vehicle Tracking: A Review
- Scope of the Work
- Objective
- Organization
The techniques for video-based vehicle tracking usually follow two main strategies - one approach deals with identifying vehicle objects in each frame and finding correspondence of the object in the adjacent frames independently, and the other deals with both of these problems jointly [15]- [19]. In their case, the target model of the particle filter is defined by the color information of the tracked object. The inherent challenge of the most popular Kalman or particle filter-based vehicle tracking algorithms is their high sensitivity to drift from the true object position, especially in long sequences for frequent occurrences of occlusion, for changes in lighting conditions, for sudden turns or shocks. vehicles.
In this context, the accurate positions obtained from a suitable set of KVFs can also be used as corrective measures to address the drift problems of Kalman filter or particle filter-based vehicle tracking. The performance of the proposed video-based tracking algorithm will be investigated and compared with that of the existing methods, both in the case of forward and backward tracking. Finally, in Section 5, a general concluding discussion on the contribution and potential impact of the proposed method is presented.
MULTIPLE TIME-SPATIAL IMAGES FOR VEHICLE DETECTION
- Introduction
- TSI for Vehicle Detection
- Multiple TSI for Vehicle Detection
- Conclusion
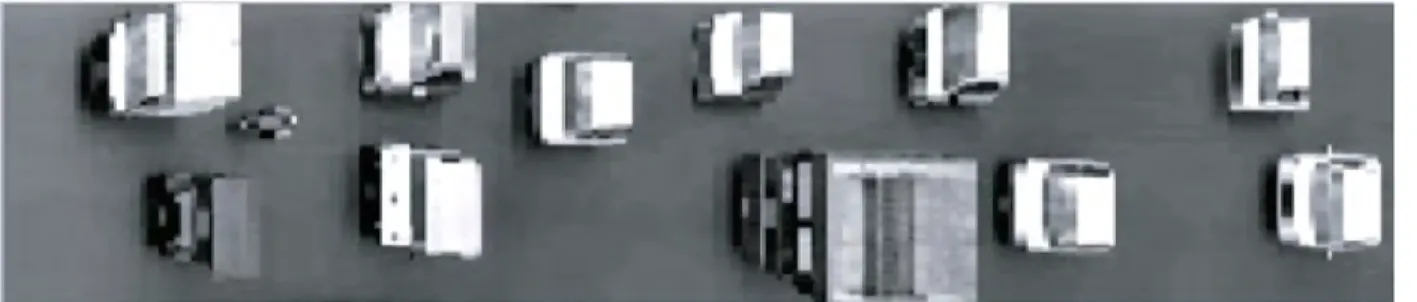
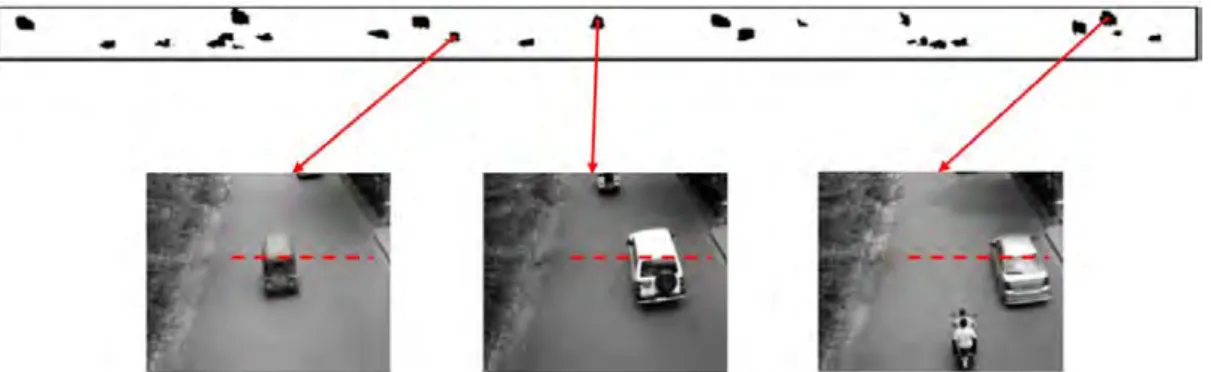
From these figures, it can be seen that each of the vehicles passing the VDL corresponds to an object in TSI. On the other hand, the vertical length or height of the object in TSI corresponds to the width of the vehicle. This is why only the KVFs are used to obtain the characteristics of the vehicle object.
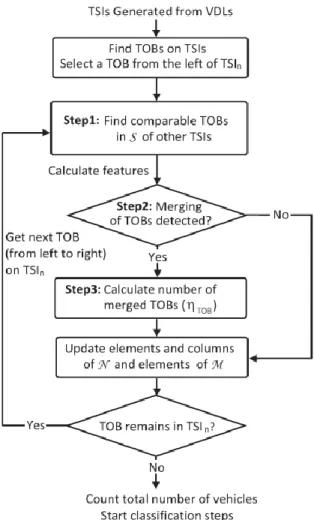
To obtain the region of interest (ROI) from the KVF, the values of the center and width of the corresponding TOB in TSI are used. To obtain from the ROI the silhouette that describes the shape and texture of the vehicle in question, a segmentation process is necessary. This figure also shows that some TOBs have been merged in some TSIs and remain disjointed in others.
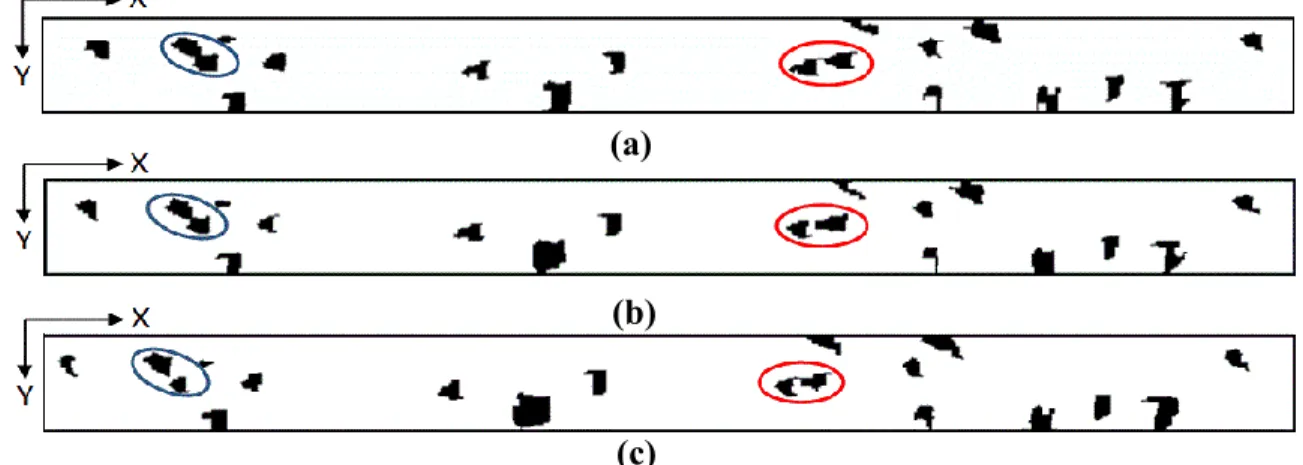
For example, the TOBs corresponding to the second and third vehicles from the left in the TSIs are combined in TSI1 and TSI2, while they are disjoint in TSI3. This array is generated from an iterative process by starting from the left of the TSIs and comparing the previously mentioned parameters. In such a case, the speed of the vehicle in meters per second is estimated from TSIs corresponding to two consecutive VDLs.
Where is the number of frames required for a vehicle to pass two consecutive VDLs and is the frame rate of the video. In such a case, the search area S along the x-axis of the TOB corresponding to the same vehicle i will be between and , in which. It should be noted that the VDLs are chosen in such a way that the lateral movements of the vehicles to the traffic flow are considerably small.
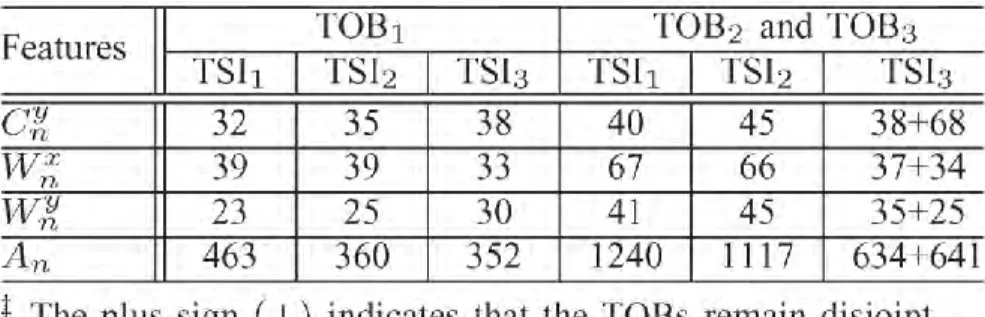
In the experiments, it was found that the values of the threshold parameters vary between 5% and 15%. Let us consider only those TOBs from the left side of the three TSIs shown in Figure 2.9, which correspond to the first five vehicles. The y-axis coordinates of the centroids, widths, and areas of the first three TOBs from the left (named TOB1, TOB2, and TOB3, with the last two grouped together in the first two TSIs) are given in Table 2.1.

MTSI-BASED TRACKING ALGORITHMS
- Introduction
- Low-Complexity MTSI-Based Tracking
- High Performance Tracking: MTSI Integrated with Particle Filter or Kalman Filter
- Tracking in Succesive Frames Using Kalman Filter
- Tracking in Succesive Frames Using Particle Filter
- Trajectory Correction in KVFs
- Conclusion
If we substitute equation (3.2) here, we get a system of linear equations in terms of the coefficients. Here, the predictor estimates the location of the target at the frame given the previous frame observations. The filtered estimate is the final estimate of the true location of the target att frame.
Here, for tracking, two prediction/estimation Kalman filters are formed: one for the horizontal position and the other for the vertical position of the vehicle-object center. In the particle filter tracking algorithm, a sample set is used to approximate the posterior density of the target state. On the basis of these properties, a method is used to measure the local image intensity features Z for a given position of the vehicle center.
Given a set of generated samples and the associated image measurements, the sample weight is defined by comparing the local image intensity measurement of the sample with that of the target object center. In section 3.3.1 and 3.3.2, the center coordinate was estimated using Kalman filtering and Particle filtering approach. In many cases, Kalman or Particle Filter misses the matching of the vehicle object center in the estimated trajectory.
The position of the center estimated from the Kalman filter or the particle filter is compared in the selected number of KVFs of the proposed tracking method. The estimated trajectory coordinate is considered incorrect if it is significantly different from the center coordinates of the vehicle in that frame estimated from the TOB. Let the center coordinates of the same vehicle in this same KVF be estimated by the Kalman filtering approach presented in Section 3.3.1 and the particle filtering approach presented in Section 3.3.2, respectively.
In experiments, the value was found to be between 1% and 5%, while the lie was between 5% and 15%.
EXPERIMENTAL RESULTS AND ANALYSIS
- Introduction
- Vehiclular Traffic-Video Data and Description
- Performance Metrics
- Performance Analysis
- Low Complexity MTSI Tracking Algorithm
- Kalman and Particle Filter-Based Tracking Algorithms
- TSI Integrated Filter-based Tracking Algorithm
- Results and Analysis
- Conclusion
Here, the evaluation of the effectiveness of the tracking methods is mainly based on the relative distance between the center of the vehicle in forward and backward tracking. Initially, the vehicle trajectory obtained by the low-complexity MTSI-based tracking method is compared with the trajectory obtained by the filter-based tracking algorithms. Then, the performance of tracking algorithm based on MTSI's integrated Kalman filter (MTSIIKF) and tracking algorithm based on MTSI's integrated particle filter (MTSIIPF) are compared with existing Kalman and particle filter based algorithms to find out , which works better in vehicle and video database.
In this section, the vehicle trajectory obtained by the low-complexity MTSI-based tracking method is compared with the trajectory obtained using other well-known methods such as particle filter [ 49 ] and Kalman filter tracking [ 24 ]. The tracking trajectory estimation of the TSI low complexity based tracking method is very close to the tracking trajectory estimated using filter-based tracking algorithms, as shown in Figs 4.1 and 4.2. However, it can also be seen that, for most vehicles that do not lose track, the Kalman tracker performs better in terms of the proximity between the forward and backward tracking coordinates.
So if the vehicle motion is linear, the Kalman filtering performs very well and the tracking coordinates match closely in forward and backward tracking. On the other hand, the particle filter does not have the linearity problem of Kalman filter based tracking and performs better in such scenarios. The integration of the MTSI-based correction mechanism improves the performance of both the Kalman filter and particle filter-based tracking methods.
It can be seen from the figures that the difference between forward and backward tracking coordinate is greater in MTSIIPF approach than that of MTSIIKF. For this, the proposed MTSI-based vehicle detection methods are compared with two other existing methods, viz. the Particle Filter Based Detection Method [49] and Kalman Filter Based Detection Method [24]. The results regarding the performance of vehicle tracking algorithms on different vehicle classes, based on proximity between forward and backward trajectory coordinate, are shown in Table 4.3 in three video sequences, when the environment was sunny, cloudy and normal.
TABLE 4.4: RESULTS REGARDING THE PERFORMANCE OF THE VEHICLE TRACKING ALGORITHMS IN TERMS OF ACCURACY IN TRACKING VEHICLES. In this chapter, the performance of the proposed MTSI-based tracking algorithms is evaluated in terms of closeness between forward and backward tracking trajectories. The performance of the proposed integrated MTSI filter-based methods is compared with two existing filter-based tracking methods, viz.
![Figure 4.1 : Comparison of Low-Complexity MTSI based tracking approach with Kalman [18] and Particle filtering [41] approach in a typical video sequence in terms of tracking of (a) Vertical center coordinates; (b) Horizontal center coordinates](https://thumb-ap.123doks.com/thumbv2/filepdfnet/10874250.0/54.893.146.755.209.903/comparison-complexity-particle-filtering-vertical-coordinates-horizontal-coordinates.webp)
CONCLUSION
Conclusion and Discussion
Scope of Further Work
7] Gunnarsson, J., Svensson, L., Danielsson, L., and Bengtsson, F., “Tracking vehicles using radar detections,” In Proceedings of IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, June 2007, pp. 15] Dellaert F., and Thorpe C., “Robust car detection using Kalman filtering and Bayesian templates,” In Proceedings of SPIE Conference on Intelligent Transportation Systems, Pittsburgh, PA, Jan. L., “Adaptive background mixture models for real-time detection,” In Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Fort Collins, CO, Jun.
T., "Target tracking using the snake particle filter," In Proceedings of IEEE Southwest Symposium on Image Analysis and Interpretation, Austin, TX, May 2010, p. G., "Object recognition from local scale-invariant features," In Proceedings of 7 IEEE International Conference on Computer Vision, Kerkyra, Greece, Sept. A multi-object tracking method using Kalman filter,” In Proceedings of International Conference on IEEE Information and Automation (ICIA), Harbin, China, June.
27] Lehuger, A., Lechat, P., and Perez, P., "An Adaptive Mixture Color Model for Robust Visual Tracking," In Proceedings of IEEE International Conference on Image Processing, Atlanta, GA, , Oct., 2006, pp . 29] Kumar, T.S., and Sivanandam, S.N., “Object detection and tracking in video using particle filter,” In Proceedings of 3rd International Conference on Computing Communication & Networking Technologies, Coimbatore, India, Jul 33] Park, K. , Lee , D., and Park, Y., “Video-based detection of street parking violation,” In Proceedings of International Conference on Image Processing, Computer Vision, Pattern Recognition, Las Vegas, NV, 2007, vol.
J., “A flow-based approach to vehicle detection and background mosaicking in airborne video,” In Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, 2005, vol. Vision-based monitoring of intersections,” In Proceedings of IEEE 5th International Conference on Intelligent Transportation Systems, Singapore, 2002, pp.7–12. 38] Zhang, Z., Cai, Y., Huang, K., and Tan, T., “Real-time moving object classification with automatic scene segmentation,” In Proceedings of IEEE International Conference on Image Processing, San Antonio, TX , 2007, vol .
M., “Vehicle detection and classification from video using spatio-temporal imaging,” In Proceedings of IEEE Intl Conf.