This thesis, entitled 'Path Finding robot avoiding other robot', submitted by Raihan Uddin to the Department of Software Engineering, Daffodil International University, has been accepted as satisfactory in partial fulfillment of the requirements for the degree of Bachelor of Science in Software Engineering and approval regarding style and content. She hereby announces that this bachelor thesis is under the supervision of Md Shohel Arman, Lecturer, Department of Software Engineering, Daffodil International University. The integration of distance measurement and avoidance of other robots is our observation in a multi-robot environment.
Besides the agent, other robot should avoid in multi-robot environment so that there is no occurrence of collision. My paper is going to demonstrate the pathfinding robot algorithm that avoids other robot that also measures their distance.
Overview
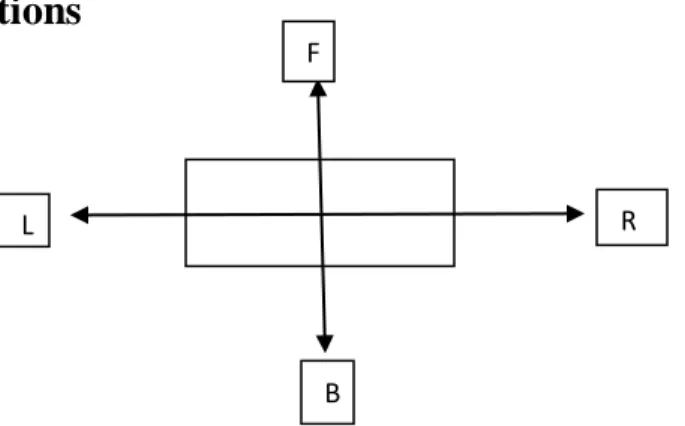
As we will discover in this postulation, especially learning all four directions between two operators and recognizing relative bearings using two bearings.
Research Objectives
Research Questions
With the goal of finding the path of the agent between the relative direction problem of the agent estimating the agent. This chapter also provides an introduction to the unmanned aerial vehicles and discusses the similarities and differentiations between previous research and this proposal. What's more, a robot refrains from crashing against an obstruction and pays little respect to the obstacle's condition by dissecting the article data obtained with an OVSLAM approach.
The unwavering quality of the calculation of the proposed arrangement was confirmed through a correlation of the maps based on the proposed calculation and the true maps keeping the arrangement by applying a real robot [2]. Addressing the problem of calculating the self-sufficient convoy robot arrangement mode in the indoor state, this paper, in the function of Dijkstra calculus and A* calculus, presents the influence of the parent center of the current center on the heuristic work in the calculation A*. and requires the ideal load of heuristic capacity to improve the calculation adjustment mode. In the wake of using more sensitive heuristic work and changing the weight appropriately, the continuous weak bound of the A* calculation was improved at the expense of a small cost [3].
A fascinating perspective is that the flow of this investigation is that despite considerable improvement in the territory over the past few decades, not a great deal of work has been accounted for especially in multi-application autonomy frameworks. It has also been seen that responsive methodologies have been used to improve the exposure of old-style approaches such as half-breed calculations. For a discretionary number of robots in self-assertive and objective courses of action, we derive a polynomial-time, total computation that produces stable ideality arrangements of factors providing both machine and compartmental optimality, undesired, under the assumption that robot signs are continuously distributed arbitrarily their calculation requires only a small expansion of the stable factors of the basic and objective impressions of the design for the illumination of the matter, i.e., the matter can be understood in an area really a little limited.
To talk about the possibility that Path Find Robot Avoids other Robot calculations that officially depict all the parts that go into the methodology, we give a really easy examination of one of his progressively famous cases of examples of overcoming adversity. This part gives an outline of the quantifiable investigation performed on this algorithmic research. This includes the hypothetical investigation of the strategies and norms associated with a part of data.
This proposal also provides an introduction to unmanned aerial vehicles and discusses the comparative qualities and contrasts between past research and this hypothesis. Mobile robot path planning based on improved A* algorithm (Mingxiu Lin, Kai Yuan, Chenzhi Shi, Yutong wang, 2017).
Defintion
Motivation of Research
AI has been a popular research point among arithmetic and computer science specialists and researchers. Mobile robot path planning based on multi-sensor information fusion[1] is the latest planning research for wayfinding in complex multi-agent environment. Our analysis is to try to give some calculations that are needed after some exercises of this last research.
We demonstrate a strategy by which our research provides better instruction in several areas of computer science.
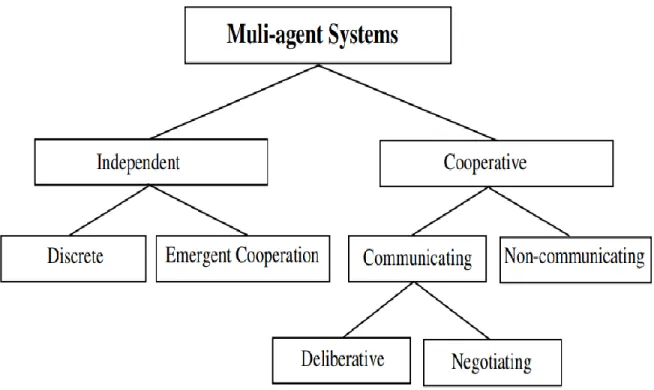
Multi-agent System Environment
Multi-administrator mode can fuse together aces making game arrangements for a common goal, a prospecting through others' plans or organization, or specialists refining their very own particular structures while presiding over companies or assets. Multi-administrator booking varies from multi-expert organizing a practically identical way to plan and change in master minding reliably the commitments to be executed begin at now picked and in a little while orchestration will largely focus on counters for explicit problem areas .
Previous Research and Work
Contrasted with the conventional editing mode with single sensor data, the Kalman channel is used to combine multi-sensor data, and the editing mode strategy is considered, which depends on an improved unique pseudo potential field strategy. By using the improved powerful false potential field technique, the robot can also achieve ideal path layout and obstacle avoidance under complex dynamic conditions. In this way, we also proposed an improved avoidance, arrangement control for the design of a multi-robot framework advanced for OVSLAM.
A diagram of the way to arrange systems for independent versatile robots, the advantages and disadvantages of these methods were exhibited and talked about quickly. A complete talk of every approach in this expansive field of research on way to arrange versatile robots has appeared. A large part of the articles deals with the subject of single mechanical technological frameworks, while leaving a wide selection of zones in composite and arranged multi-use autonomy frameworks, still open for future works.
At present, the improvement in way of arranging coherent is gradually excited by new applications, for example sorting coordination, printed circuit board diagram, PC developments, activities, pharmaceutical prescription plans, computational science extra. Bit by bit studies of old style and responsive methods are made here to understand the evolution of way to arrange systems under different natural conditions and to recognize look into the hole. From now on, responsive methods are increasingly known and generally used as a way to arrange versatile robots.
We study the highlighted problem on how to arrange multiple robots in non-stop 2D and 3D spaces without obstacles, where robots should not collide with each other.
Induction
Point of Directions
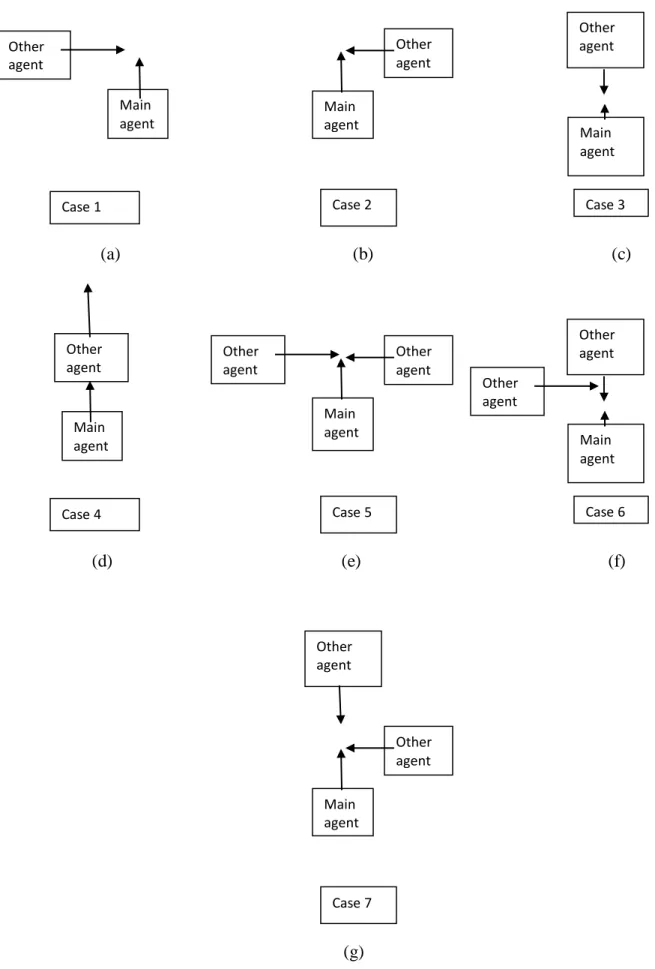
Here is an explanation of the examples. a) Example-1 the main agent moves forward and the second agent moves right. An essential part of this quantitative research is the creation and application of scientific models, speculations or theories regarding miracles. In the PFRAOR algorithm, the master agent can move to the target destination by observing the movement of other robots, and can also perform distance estimation between the master agent and the other agent.
The purpose of this proposal is to take a look at the execution of the Pathfinding robot algorithm for mastering the achievement of the goal, maintaining a strategic distance from deterrence in a multi-specialty plot situation. The second part of this work focuses on logical investigations, and how they disentangle the PFRAOR calculation. The observation of the experiment presents the algorithm for determining the obstacle robot and the distance between them, where the main agent will go to its destination and avoid another agent during programming.
The purpose of this premise is to realize a dream in implementing the PFRAOR algorithm for mastering learning heads in a multi-operator plotting condition. The second part of this work focuses on consistent assessment and how they unravel the PFRAOR algorithm. A Novel Multi-Robot Path Planning Algorithm: Dynamic Distributed Particle Swarm Optimization (Asma Ayari, Sadok Bouamama, 2017).
On Path Planning Strategies for Mobile Robot Navigation (B.K. Patle, Ganesh Babu L, Anish Pandey, D.R.K. Parhi, A. Jagadeesh, 2019). SEAR: A Polynomial Time Multirobot Path Planning Algorithm with Expected Optimum Factor Constant Guarantee (Shuai D. Han, Edgar J. Rodriguez, Jingjin Yu, 2018). Implementation of UGV for Autonomous Path Planning and Obstacle Avoidance Using SLAM (Naveed Ur Rehman, Kundan Kumar, Ghulam e Mustafa Abro, 2018).
Structures Of Algorithm
Algorithm for distance measurement
Aspect of AI
Quantitative Research
Experimental Research
Accuracy Result
Comparison
By setting up a calculation to continue to fall short without hesitating about the relative learning reason of the headline, we can achieve uncertain proportions of viewing time. The underlying part is related to looking at relative price characteristics when displaying a direct calculation. In the third part, this recommendation is modified and the depth of viewpoint calculation is changed, remembering the ultimate goal of getting an answer to the standard goal around the beginning of this work.
The PFRAOR algorithm can set aside the handling and avoidance of other agents, its performed work methodology or calculation more prominent open access way for result. It likewise shows a speculative basis on this calculation which is of intrigue during the investigation. In this theory, we display preliminary layout, viable data, logical thinking and structure of PFRAOR algorithm.
The basic segment involves looking at the qualities of relative rate in demonstrating an instantaneous calculation. This recommendation has been changed and implemented, see the perspectives calculation, remembering the real goal to answer the standard goal at the beginning of this work. Future work includes analyzing the lead of this computation in conjunction with the latest spread of execution times.
There are plenty of opportunities to use this kind of theory to create a new revolution in robotics.
Summury
Conclusion
The exam gives a prologue to Path Finding Robot Avoiding Other Robot (PFRAOR) calculation and the different ways to handle supervision of making beneficial solvers. We present a new abstract outline and delineation. This PFRAOR calculation can handle these issues for overseeing and seeing relative bearings, the performed work method or count spares increasingly salient open portal for result.
Future Work
Since it is a challenge to properly control the movement of robots, there will be effective inventions to develop humanity's activities.