ANALISIS GAYA-GAYA DAN TEGANGAN PADA
ALAT PENGANGKUT/ PENYUSUN PETI KEMAS
(REACHSTACKER) DENGAN VARIABEL SUDUT
DAN PANJANG LENGAN BERUBAH, BEBAN TETAP
SKRIPSI
Skripsi Yang Diajukan Untuk Memenuhi Syarat Memperoleh Gelar Sarjana Teknik
NIM.060401043
BUDI SATIANO
DEPARTEMEN TEKNIK MESIN
FAKULTAS TEKNIK
KATA PENGANTAR
Segala puji dan syukur selalu dipanjatkan kepada Allah SWT yang telah
memberikan begitu banyak nikmat. Baik nikmat iman, ilmu, kesehatan dan
nikmat lainnya sehingga penulis dapat menyelesaikan skripsi ini.
Skripsi yang membahas tentang pembahasan Mekanika Kekuatan Bahan
dimana skripsi ini berjudul “ANALISIS GAYA-GAYA DAN TEGANGAN PADA ALAT PENGANGKUT/PENYUSUN PETI KEMAS
(REACHSTACKER) DENGAN VARIABEL SUDUT DAN PANJANG
LENGAN BERUBAH, BEBAN TETAP ” . skripsi ini merupakan salah satu syarat untuk menyelasikan masa studi dan memperoleh gelar sarjana di
Departemen Teknik Mesin Fakultas Teknik Universitas Sumatera Utara.
Dalam penulisan dan pembuatan skripsi ini penulis banyak mendapatkan
bantuan, arahan dan bimbingan dari berbagai pihak guna menyelesaikan skrisp
ini. Untuk itu penulis ingin menyampaikan ucapan terima kasih kepada :
1. Kedua orang tua tercinta Ayahanda (Alm) Sukri Amin dan Ibunda
Rosmanizar yang telah memberikan kasih sayangnya, pengorbanannya, perhatian
yang tiada batas serta mendoakan penulis. Uda ison, uda ta yang selalu memberi
motivasi dan dukungannya. Yuli, ummi kalian harus lebih baik dari abang.
2. Bapak Ir. Tugiman K, MT sebagai dosen pembimbing yang telah sabar
dalam membimbing dan banyak memberikan semangat, motivasi, ilmu dan
3. Bapak Dr. Ing. Ir. Ikhwansyah Isranuri dan Bapak Ir. M. Syahril Gultom,
MT, selaku Ketua dan Sekretaris Departemen Teknik Mesin, Fakultas Teknik
USU.
4. Ibu Ir. Ida Ariani, MT dan teman-teman di IKTM yang selalu memberikan
semangat dan motivasi penulis dalam menyelsaikan skripsi ini.
5. Seluruh Dosen dan Staff Departemen Teknik Mesin USU yang telah
membantu penulis
6. Teman teman stambuk 2006 yang selalu memberi semangat dan motivasi
tertuma Harun al Rasyid yang telah menjadi teman diskusi .
Penulis mengharapkan kritik dan saran yang sifatnya membangun demi
penyempurnaan di masa mendatang.
Akhir kata, penulis berharap semoga tulisan ini bermanfaat bagi kita semua.
Medan, Juli 2012
Penulis,
BUDI SATIANO
ABSTRAK
Raechtacker merupakan salah satu alat pengangkut dan pemindah bahan yang digunakan pada pelabuhan petikemas sebagai transportasi penyusunan dan pemindahan petikemas. Reachstacker adalah mobil crane khusus untuk mengangkat dan menyusun petikemas yang digunakan pada terminal petikemas.Karena reachstacker mempunyai peranan penting dalam transportasi pengangkatan pada petikemas dengan intensitas yang tinggi, maka kemungkinan terjadinya kerusakan reachstacker sangat rentan, sehingga perlu penelitian terhadap reachstacker dengan berbagai kondisi pembebanan. Penganalisisan ini dilakukan hanya pada lengan reachstacker dengan berbagai kombinasi sudut dan panjang lengan dengan beban konstan pada keadaan mobil secara diam dan dalam keadaan statis. Perhitungan analisis dilakukan secara superposisi dibagi dalam tiga bagian atau tiga titik. Sehingga dalam perhintungannya kondisi tegangan yang tinggi terjadi pada titik pertama dengan sudut100dengan panjang 15,5 meter dengan nilai tegangangnya sebesar 77396,60 kPa. Dari nilai tegangang dapat di ambil keseimpulan bahwa semakin kecil sudut dan semakin panjang lengan maka nilai tegangan akan semakin besar.
Kata Kunci :Reachstacker, Tegangan, PetiKemas
ABSTRACK
Reachstacker is one of transport tools and material transfer which used on shipping container harbor as a transportation for arranging and transfer shipping container. Reachstacker is a special crane car for lifter and arranger shipping container that used on slipping container terminal. Caused the reachstacker has the important role as the lifter transportation of shipping container with big intensity, possibility of reachstacker damage was susceptible, therefore the research of reachstacker is to be needed with some load condition. The analized build on reachstacker arm only by some angle combination and arm length with constans load at motion less car condition and static condition. Analizing calculation gave in superposition devided on three parts or three points. So in its calculation. The highest strain resulted on 100with length 15,5 meters at first points with strain value 77396,60 kPa. The highest strained condition appeared at first point. The smaller angle on its arms the bigger strained happened, and the longer arms the bigger strained resulted.
DAFTAR ISI Kata Pengantar Daftar Isi Daftar Gambar Daftar Tabel Daftar Notasi
BAB I PENDAHULUAN 1
1.1Latar Belakang 1
1.2Tujuan Penelitian 2
1.3Manfaat Penelitian 3
1.4Batasan Masalah 3
1.5Metodologi Penelitian 4
1.6Sistematika Penulisan 4
2 BAB II TINJAUAN PUSTAKA 5
2.1Reachstacker 6
2.2Komponen-Komponen Reachstacker 6
2.2.1 Spreader 7
2.2.2 Lengan/ Boom 7
2.3Spesifikasi Teknis 8
2.3.1 Peti Kemas 9
2.4Cara Kerja Reachstacker 11
2.4.1 Gerakan Mobil 11
2.4.2 Gerakan Lengan/Boom 11
2.4.3 Gerakan Trolley 12
2.4.4 Gerakan Spreader 12
2.5Mekanisme Reachstacker 12
2.5.1 Mekanisme Penggerak 12
2.5.2 Mekanisme Pesawat Angkat 13
2.6Gaya Pada Reachstacker 13
2.7Persamaan Kesetimbangan 16
2.8Gaya dan Momen PadaTumpuan 17
2.9.1 Tegangan Satu Arah (Uniaxial) 21
2.9.2 Tegangan Dua Arah (Biaxial) 26
2.9.3 Tegangan Utama (Principal Stess) 30
2.9.4 Lgkaran Tegangan Mohr Tegangan Utama 34
BAB III : METODE PENELITIAN 36
3.1 Pendahuluan 36
3.2.1 Spesifikasi 36
3.2 Pelaksanaan Penelitian 38
3.3 Urutan Proses Analisis 39
3.3.1 Latar Belakang 39
3.3.2 Studi Literatur 39
3.3.3 Pengumpulan Data 39
3.3.4 Pembahasan 39
3.3.5 Kesimpulan 39
3.4 Penentuan Titik Perhitungan Gaya dan Tegangan 40
3.5 Gaya-Gaya yang Terjadi Pada Reachstacker 40
3.5.1 Tegangan dan Gaya Pada Panjang (l) Pada Titik Satu (x1)42 3.5.2 Tegangan dan Gaya Pada Panjang (l) Pada Titik Satu (x2)43 3.5.3 Tegangan dan Gaya Pada Panjang (l) Pada Titik Satu (x3)44 BAB IV : ANALISA DATA 45
4.1 Analisa Gaya Kesetimbangan Pada Kondisi Idle 45
4.2 Analisa Gaya Pada Lengan Pengangkat 50
4.2.1 Analisis Gaya dan Tegangan Pada Panjang (x1) 51
4.2.2 Analisis Gaya dan Tegangan Pada Panjang (x1) 56
4.2.3 Analisis Gaya dan Tegangan Pada Panjang (x3) 60
4.5 Hasil Perhitungan Keseluruhan 63
BAB V : KESIMPULAN DAN SARAN 66
5.1 Kesimpulan 66
5.2 Saran 66
DAFTAR PUSTAKA
DAFTAR GAMBAR
1. Gambar 2.1 Reachstacker 2. Gambar 2.2 Spreader
3. Gambar 2.3 Lengan Pengangkat
4. Gambar 2.4 Dimensi reachstacker
5. Gambar 2.5 Peti Kemas
6. Gambar 2.6 Gaya-gaya pada reachstacker
7. Gambar 2.7 Gaya-gaya pada mobil reachstacker
8. Gambar 2.8 Gaya-gaya pada lengan reachstacker
9. Gambar 2.19 Gaya-gaya pada reachstacker
10.Gambar 2.10 Gaya-gaya pada batang penyangga
11.Gambar 2.11 Free Body diagram kesetimbangan gaya dan momen
12.Gambar 2.12 Diagram Gaya geser dan momen
13.Gambar 2.13 Diberi gaya tarik
14.Gambar 2.14 Batang dengan penampang miring
15.Gambar 2.15 Lingkaran mohr tegangan satu arah
16.Gambar 2.16 Tegangan pada sebuah batang
17.Gambar 2.17 Lingkaran mohr tegangan satu dua
18.Gambar 2.18 Tegangan umum yang terjadi
19.Gambar 2.19 Lingkaran mohr
20.Gambar 3.1 Dimensi reachstacker
21.Gambar 3.2 Diagram alir penelitian
22.Gambar 3.3 Gaya luar reachstacker pada posisi idle
23.Gambar 3.4 Gaya luar pada lengan posisi idle
24.Gambar 3.5 Gaya luar dan gaya dalam pada lengan reachstacker dengan sudut α
25.Gambar 3.6 Free Body Diagram untuk titik 1(satu)/ x1
26.Gambar 3.7 Free Body Diagram untuk titik 2(dua)/ x2
27.Gambar 3.9 Free Body Diagram untuk titik 3(tiga)/ x3
28.Gambar 4.1 Gaya luar pada lengan posisi idle
30.Gambar 4.3 Gaya luar lengan
31.Gambar 4.4 Verifikasi Sudut
32.Gambar 4.5 Free Body Diagram untuk titik 1(satu)/ x1
33.Gambar 4.6 Free Body Diagram untuk titik 2(dua)/ x2
34.Gambar 4.7 Free Body Diagram untuk titik 3(tiga)/ x3
35.Gambar 4.8 Grafik tegangan maksimum pada panjang lengan 11 meter
36.Gambar 4.9 Grafik tegangan maksimum pada panjang lengan 11,5 meter
37.Gambar 4.10 Grafik tegangan maksimum pada panjang lengan 12 meter
38.Gambar 4.11 Grafik tegangan maksimum pada panjang lengan 12,5 meter
39.Gambar 4.12 Grafik tegangan maksimum pada panjang lengan 13 meter
40.Gambar 4.13 Grafik tegangan maksimum pada panjang lengan 13,5 meter
41.Gambar 4.14 Grafik tegangan maksimum pada panjang lengan 14 meter
42.Gambar 4.15 Grafik tegangan maksimum pada panjang lengan 14,5 meter
43.Gambar 4.16 Grafik tegangan maksimum pada panjang lengan 15 meter
44.Gambar 4.17 Grafik tegangan maksimum pada panjang lengan 15 meter
45.Gambar 4.18 Grafik tegangan geser maksimum pada panjang lengan 11 meter
46.Gambar 4.19 Grafik tegangan geser maksimum pada panjang lengan 11,5
meter
47.Gambar 4.20 Grafik tegangan geser maksimum pada panjang lengan 12 meter
48.Gambar 4.21 Grafik tegangan geser maksimum pada panjang lengan 12,5
meter
49.Gambar 4.22 Grafik tegangan geser maksimum pada panjang lengan 13 meter
50.Gambar 4.23 Grafik tegangan geser maksimum pada panjang lengan 13,5
meter
51.Gambar 4.24 Grafik tegangan geser maksimum pada panjang lengan 14 meter
52.Gambar 4.25 Grafik tegangan geser maksimum pada panjang lengan 14,5
meter
53.Gambar 4.26 Grafik tegangan geser maksimum pada panjang lengan 15 meter
54.Gambar 4.27 Grafik tegangan geser maksimum pada panjang lengan 15,5
DAFTAR TABEL
Table 2.1 Ukuran peti kemas standar
Table 4.1 Verifikasi sudut
Table 4.2 Hasil perhitungan dengan variasi sudut 200- 600 dengan panjang lengan 11 meter
Table 4.3 Hasil perhitungan dengan variasi sudut 200- 600 dengan panjang lengan 11,5 meter
Table 4.4 Hasil perhitungan dengan variasi sudut 100- 600 dengan panjang lengan 12 meter
Table 4.5 Hasil perhitungan dengan variasi sudut 100- 600 dengan panjang lengan 12,5 meter
Table 4.6 Hasil perhitungan dengan variasi sudut 100- 600 dengan panjang lengan 13 meter
Table 4.7 Hasil perhitungan dengan variasi sudut 100- 600 dengan panjang lengan 13,5 meter
Table 4.8 Hasil perhitungan dengan variasi sudut 100- 600 dengan panjang lengan 14 meter
Table 4.9 Hasil perhitungan dengan variasi sudut 100- 600 dengan panjang lengan 14,5 meter
Table 4.10 Hasil perhitungan dengan variasi sudut 100- 600 dengan panjang lengan 15 meter
DAFTAR NOTASI
F gaya kN
A luas penampang m2
M momen Nm
I inersia m
x koordinat titik berat x y koordinat titik berat y
N gaya normal kN
V gaya geser kN
W berat kN
m massa kg
g grafitasi 2
s m
R panjang lengan m
σ tegangan normal Pa
ABSTRAK
Raechtacker merupakan salah satu alat pengangkut dan pemindah bahan yang digunakan pada pelabuhan petikemas sebagai transportasi penyusunan dan pemindahan petikemas. Reachstacker adalah mobil crane khusus untuk mengangkat dan menyusun petikemas yang digunakan pada terminal petikemas.Karena reachstacker mempunyai peranan penting dalam transportasi pengangkatan pada petikemas dengan intensitas yang tinggi, maka kemungkinan terjadinya kerusakan reachstacker sangat rentan, sehingga perlu penelitian terhadap reachstacker dengan berbagai kondisi pembebanan. Penganalisisan ini dilakukan hanya pada lengan reachstacker dengan berbagai kombinasi sudut dan panjang lengan dengan beban konstan pada keadaan mobil secara diam dan dalam keadaan statis. Perhitungan analisis dilakukan secara superposisi dibagi dalam tiga bagian atau tiga titik. Sehingga dalam perhintungannya kondisi tegangan yang tinggi terjadi pada titik pertama dengan sudut100dengan panjang 15,5 meter dengan nilai tegangangnya sebesar 77396,60 kPa. Dari nilai tegangang dapat di ambil keseimpulan bahwa semakin kecil sudut dan semakin panjang lengan maka nilai tegangan akan semakin besar.
Kata Kunci :Reachstacker, Tegangan, PetiKemas
ABSTRACK
Reachstacker is one of transport tools and material transfer which used on shipping container harbor as a transportation for arranging and transfer shipping container. Reachstacker is a special crane car for lifter and arranger shipping container that used on slipping container terminal. Caused the reachstacker has the important role as the lifter transportation of shipping container with big intensity, possibility of reachstacker damage was susceptible, therefore the research of reachstacker is to be needed with some load condition. The analized build on reachstacker arm only by some angle combination and arm length with constans load at motion less car condition and static condition. Analizing calculation gave in superposition devided on three parts or three points. So in its calculation. The highest strain resulted on 100with length 15,5 meters at first points with strain value 77396,60 kPa. The highest strained condition appeared at first point. The smaller angle on its arms the bigger strained happened, and the longer arms the bigger strained resulted.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Perkembangan transportasi jarak jauh saat ini berkembang sangat pesat.
Hal ini merupakan faktor yang sangat penting sebagai sarana untuk mengangkut
barang-barang yang dibutuhkan manusia yang semakin bervariasi. Untuk
mengangkut barang dalam jumlah yang banyak serta jarak yang terpisah oleh laut,
maka pengangkutan dengan kapal laut merupakan sarana yang paling efektif.
Agar kualitas barang yang diangkut tetap baik, aman dan operasi bongkar muat
lebih cepat, maka dibuatlah suatu wadah barang yang dapat diangkut dari
pelabuhan ke kapal atau sebaliknya yang disebut dengan peti kemas, dimana
wadah tersebut juga dapat disimpan dilapangan terbuka sehingga tidak diperlukan
lagi gudang sebagai tempat penyimpanan barang dan dengan demikian dapat
mengurangi biaya pengeluaran.
Kecenderungan untuk memakai peti kemas saat ini semakin tinggi seiring
dengan semakin berkembangnya pertumbuhan ekonomi Indonesia yang terlihat
dari semakin ramainya kegiatan ekspor dan impor dipelabuhan-pelabuhan besar.
Sehubungan dengan itu maka dibutuhkan suatu pesawat pengangkat yang dapat
mengangkat dan memindahkan peti kemas dari pelabuhan ke kapal atau
sebaliknya dengan gerak dan mobilitas yang baik dan aman.
Salah satu pesawat pengangkat yang digunakan dalam pelabuhan peti
Reachstacker sebagai salah satu mesin pengangkat peti kemas mempunyai
peranan besar untuk kelancaran arus keluar masuk barang di pelabuhan.
Reachstacker digunakan untuk menyusun peti kemas yang akan dimuat ke kapal
dari truck pengangkut peti kemas yang berasal dari penyimpanan sementara peti
kemas. Tegangan yang terjadi pada reachstacker sangat tinggi sehingga
mempunyai intensitas pemakaian yang tinggi dan peranan penting dipelabuhan
maka kemungkinan terjadinya kerusakan harus dapat dicegah dan diminimalisir.
Untuk mencegah terjadinya kerusakan pada reachstacker maka penelitian terhadap
berbagai kondisi pembebanan reachstacker sangat diperlukan.
Setelah sebelumnya dilakukan penelitian yang dilakukan oleh saudara Roni
Hamdani Bako, ST mengenai alat pengangkut/pemindah peti kemas
(reachstacker) dengan judul skripsi ”Analisis Teoritis Kapasitas Angkat Terhadap
Keseimbangan Peralatan Pengangkat Reachstacker Pada Berbagai Kombinasi
Sudut Dan Panjang Lengan Pengangkat”. Dimana dalam pembahasan skripsi
tersebut membahas kesetimbangan gaya, agar tidak terjadi jungkir. Oleh sebab itu,
maka dilakukan lanjutan penelitian tentang gaya dan tegangan yang terjadi pada
reachstacker untuk mendapatkan nilai tegangan maksimum agar tidak terjadi patah atau bengkok pada lengan.
1.2 Tujuan Penelitian
Terdapat beberapa tujuan khusus yang diharapkan dapat dicapai sehubungan
dengan penelitian ini, antara lain :
1. Mengetahui penjabaran gaya-gaya yang terjadi pada lengan
2. Mendapatkan kondisi maksimum (tegangan) yang terjadi pada
reachstacker dengan variasi panjang lengan dan sudut lengan
pengangkat/boom dari peralatan pengangkat pada reachstacker dalam
keadaan diam dengan beban tetap
3. Meminimalisir terjadinya patah pada lengan reachstacker.
1.3 Manfaat Penelitian
Manfaat dari penelitian diharapkan mengetahui ketahanan reachstacker
sehingga bisa dilakukan pencegahan kerusakan (preventive maintenance),
meminimalisir kerugian, dan mengurangi terjadinya kesalahan operator
(Human Error).
1.4 Batasan Masalah
Peralatan pengangkat reachstacker merupakan salah satu peralatan yang terus
menerus dipakai pada proses bongkar muat peti kemas. Oleh karena itu
kemungkinan terjadi kerusakan juga sangat tinggi dan hal tersebut akan
berpengaruh besar terhadap proses bongkar muat peti kemas tersebut. Untuk
mencegah terjadinya kondisi yang dapat menyebabkan kerusakan fatal pada
reachstacker, maka dibuatlah penelitian yang bertujuan agar dapat meminimalisir
kemungkinan kerusakan terjadi. Penelitian ini difokuskan pada kemampuan
angkat peralatan pengangkat reachstacker untuk mendapatkan titik kritis angkat
lengan dengan beban yang konstan dilihat dari besar sudut dan panjang lengan
Dalam penelitian ini ditetapkan beberapa batasan penelitian, antara lain :
1. Analisis diagram benda bebas gaya-gaya yang terjadi pada lengan reachstacker dalam keadaan statis.
2. Analisis dan perhitungan gaya dan tegangan dalam keadaan statis pada
lengan reachstacker dengan menggunakan perhitungan super posisi, yang
dibagi dalam tiga titik/ bagaian pada setiap sudut dan panjang lengan.
1.5 Metodologi Penelitian
Untuk mendapatkan permasalahan maka dilakukan analisis kapasitas angkat
maksimum pada alat pengangkat reachstacker akibat perubahan panjang lengan
dan sudut lengan pangangkat. Dengan mencari variabel bebas yang terdapat pada
reachstacker yaitu panjang lengan pengangkat, sudut lengan pengangkat, beban.
Setelah medapatkan variabel yang dibutuhkan, kemudian dilakukan analisis
tegangan, perhitungan gaya-gaya dan tegangan dengan variabel sudut dan panjang
lengan berubah, beban tetap pada saat keadaan mobil diam .
1.6 Sistematika Penulisan
Sistematika penulisan yang dilakukan dalam pembuatan skirsi ini adalah
terdiri dari beberapa bab. Pada bab I yang merupakan pendahuluan dimana berisi
tentang latar belakang yang menentukan pengambilan penelitian diaman terdapat
rumusan masalah, tujuan masalah, tujuan dan manfaat penelitian, batsan masalah,
metode penelitian dan sistematika penelitian. Kemudian pada bab II berisi tentang
tinjauan pustaka yang didalam menjelaskan tentang ulasan teori-teori yang
penelitian tentang hal-hal yang ditujukan untuk mencapai tujuan dimana
mencakup dalam segi perencanaan. Di bab IV menjelaskan tentang analisa dan
hasil perhitungan data. Kemudian pada bab V berisi tentang kesimpulan dari
penelitian dan saran untuk kedepannya. Daftar pustaka yang merupakan referensi
BAB II
TINJAUAN PUSTAKA
Pada perkembangan teknologi yang begitu pesat saat ini, maka perlu
pemilihan mesin pemindah bahan yang tepat dan sesuai pada tiap-tiap aktivitas
untuk meningkatkan efisiensi dan daya saing.
Mesin pemindah bahan dalam operasinya dapat diklasifikasi atas dua jenis
yaitu :
1. Pesawat Pengangkat
Pesawat pengangkat dimaksudkan untuk keperluan mengangkat dan
memindahkan barang dari suatu tempat ke tempat yang lain yang
jangkauannya relative terbatas.
Contohnya : 1. Crane
2. Reachstacker
3. Lift
2. Pesawat Pengangkut
Pesawat pengangkut dapat memindahkan muatan secara
berkesinambungan dan kontinuitas dan juga dapat mengangkut muatan
dalam jarak yang relatif jauh.
Contohnya : 1. Conveyor
2. Lori pengangkut
3. Elevator buah
Pada bab ini, akan dibahas mengenai landasan teori yang berkaitan
2.1Reachstacker
Reachstacker merupakan salah satu tipe pesawat pengangkat dimaksudkan
untuk keperluan mengangkat dan memindahkan barang dari suatu tempat
ketempat yang lain yang jangkauannya relatif terbatas. Reachstacker merupakan
peralatan pemindah bahan yang paling flexibel yang dioperasikan pada terminal
pelabuhan kecil maupun sedang. Reachstacker dapat mengangkut kontainer dalam
jarak dekat dengan relatif cepat dan juga dapat menyusun kontainer pada
gambar 2.1 reachstacker
berbagai posisi tergantung ruang gerak yang ada. Reachstacker terlihat pada
gambar 2.1 dapat mengangkat beban hingga 45 ton
. Terdapat beberapa keterbatasan dalam pengoperasian sudut lengan
pengangkat. Keterbatasan ini menjadi objek kajian penelitian ini.
2.2Komponen-komponen Reachstacker
Terdapat 2 komponen utama pada Reachstacker yaitu :
1. Spreader
2.2.1 Spreader
Spreader berfungsi untuk menjepit peti kemas. Pada spreader inilah terdapat
komponen Twist lock yang berguna untuk mengunci peti kemas sebelum diangkat
spreader terlihat pada gambar 2.2
Gambar 2.2 Spreader
2.2.2 Lengan / boom
Lengan berfungsi sebagai pengangkat / penyangga beban agar dapat menjangkau
tempat yang tinggi. Lengan reach stacker terlihat pada gambar 2.3
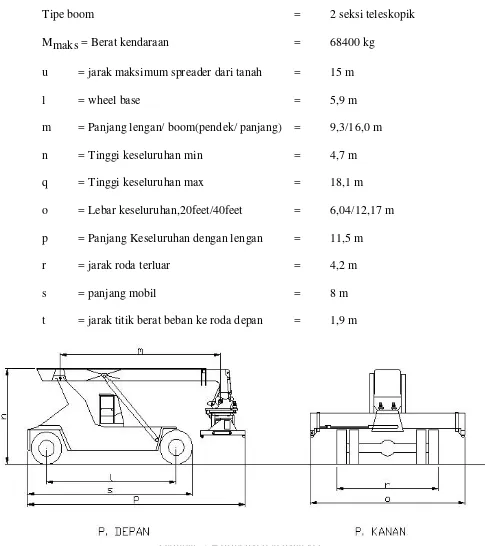
2.3Spesifikasi Teknis
Data teknis reachstacker untuk perhitungan dapat dilihat pada gambar 2.4.
yaitu :
Daya, putaran = 246 kW, 2000 rpm
Tipe boom = 2 seksi teleskopik
Mmaks = Berat kendaraan = 68400 kg
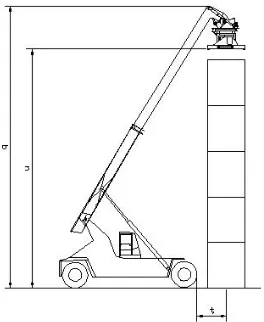
u = jarak maksimum spreader dari tanah = 15 m
l = wheel base = 5,9 m
m = Panjang lengan/ boom(pendek/ panjang) = 9,3/16,0 m
n = Tinggi keseluruhan min = 4,7 m
q = Tinggi keseluruhan max = 18,1 m
o = Lebar keseluruhan,20feet/40feet = 6,04/12,17 m
p = Panjang Keseluruhan dengan lengan = 11,5 m
r = jarak roda terluar = 4,2 m
s = panjang mobil = 8 m
t = jarak titik berat beban ke roda depan = 1,9 m
Gambar. 2.5 dimensi reachstacker
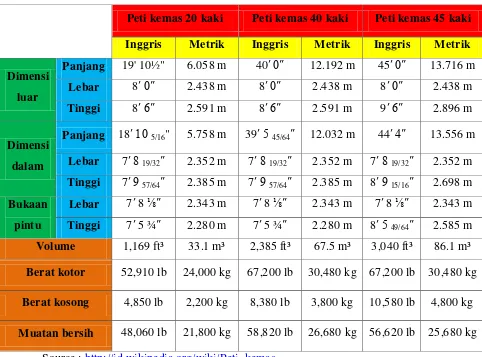
2.3.1 Spesifikasi Peti Kemas
Dalam pengangkutan barang yang melalui dan memakai
transportasi laut dalam jumlah yang besar biasanya menggukan tempat
pengepak barang yang baik dan aman. Peti kemas digunakan untuk wadah/
tempat muatan barang yang akan dipindahkan agar tidak mengalami
kerusakan saat proses pemindahan. Peti kemas mempunyai ukuran standar
yang dipakai oleh hampir semua negara. Badan International Standart
Organization (ISO) telah menetapkan ukuran-ukuran dari peti kemas.
Tabel 2.1 Ukuran peti kemas standar
Peti kemas 20 kaki Peti kemas 40 kaki Peti kemas 45 kaki
Inggris Metrik Inggris Metrik Inggris Metrik
Dimensi luar
Panjang 19' 10½" 6.058 m 40′ 0″ 12.192 m 45′ 0″ 13.716 m
Lebar 8′ 0″ 2.438 m 8′ 0″ 2.438 m 8′ 0″ 2.438 m
Tinggi 8′ 6″ 2.591 m 8′ 6″ 2.591 m 9′ 6″ 2.896 m
Dimensi dalam
Panjang 18′ 10 5/16" 5.758 m 39′ 5 45/64″ 12.032 m 44′ 4″ 13.556 m Lebar 7′ 8 19/32″ 2.352 m 7′ 8 19/32″ 2.352 m 7′ 8 19/32″ 2.352 m Tinggi 7′ 9 57/64″ 2.385 m 7′ 9 57/64″ 2.385 m 8′ 9 15/16″ 2.698 m Bukaan
pintu
Lebar 7′ 8 ⅛″ 2.343 m 7′ 8 ⅛″ 2.343 m 7′ 8 ⅛″ 2.343 m Tinggi 7′ 5 ¾″ 2.280 m 7′ 5 ¾″ 2.280 m 8′ 5 49/64″ 2.585 m Volume 1,169 ft³ 33.1 m³ 2,385 ft³ 67.5 m³ 3,040 ft³ 86.1 m³ Berat kotor 52,910 lb 24,000 kg 67,200 lb 30,480 kg 67,200 lb 30,480 kg Berat kosong 4,850 lb 2,200 kg 8,380 lb 3,800 kg 10,580 lb 4,800 kg Muatan bersih 48,060 lb 21,800 kg 58,820 lb 26,680 kg 56,620 lb 25,680 kg
Source :
2.4Cara Kerja Reachstacker
Reachstacker bekerja dengan mekanisme angkat dengan cara memanjang/
meninggikan lengan pengangkat lalu memindahkan petikemas dengan mekanisme
mobil ke tempat lain.
Adapun cara kerja dari Reachstacker ini dapat dibagi atas tiga gerakan
yaitu :
1. Gerakan mobil
2. Gerakan lengan/boom
3. Gerakan trolley
4. Gerakan Spreader
2.4.1 Gerakan Mobil
Gerakan mobil ini adalah gerakan reachstacker untuk pindah dari suatu
tempat ketempat lain. Reachstacker bergerak seperti gerakan mobil pada
umumnya. Reachstacker memiliki 6 buah ban karet yang terdiri dari 2 buah ban
pada bagian belakang dan 4 buah ban dibagian depan. Roda pada reachstacker
digerakkan oleh putaran yang berasal dari mesin.
2.4.2 Gerakan Lengan/boom
Gerakan lengan/boom ini adalah gerakan angkat dan turun lengan serta
gerakan memanjang dan memendek lengan secara bersamaan sehingga lengan
dapat mengangkat dan menurunkan peti kemas sampai pada ketinggian tertentu.
Gerakan lengan ini memiliki sudut tertentu terhadap bidang datar yang
2.4.3 Gerakan Trolley
Gerakan trolley ini adalah gerakan untuk memutar spreader dan
menyeimbangkan petikemas agar selalu dalam keadaan tegak, yang berarti
memutar peti kemas sehingga peti kemas dapat dengan tepat disusun secara
bertingkat.
2.4.4 Gerakan Spreader
Gerakan spreader ini adalah gerakan untuk memanjang dan memendekkan
spreader sehingga dapat disesuaikan untuk mengangkat peti kemas. Spreader
dapat memanjang dengan menggunakan daya hidrolik. Spreader dapat memanjang
dengan panjang 40 feet dan 20 feet desesuaikan dengan standar internasional
ukuran peti kemas.
2.5 Mekanisme Reachstacker
Reachstacker mempunyai beberapa mekanisme dalam melakukan kerja
sebagai satu kesatuan dari mesin pengangkat. Beberapa mekanisme bersinergi
menjadikan reachstacker dapat bergerak mengangkat sekaligus berjalan. Berikut
merupakan mekanisme yang terdapat pada reachstacker yaitu :
1. Mekanisme penggerak
2. Mekanisme Pengangkat
2.5.1 Mekanisme Penggerak
Mekanisme penggerak merupakan salah satu mekanisme yang digunakan
Mekanisme ini menggunakan roda karet untuk bergerak berpindah. Untuk
menggerakkan roda diperlukan daya. Daya didapatkan dari hasil pembakaran
yang terjadi pada motor diesel dan disalurkan melalui sistem transmisi.
2.5.2 Mekanisme Pesawat Angkat
Mekanisme pesawat angkat adalah salah satu mekanisme yang digunakan
untuk mengangkat atau menurunkan peti kemas ketingkat yang lebih tinggi. Peti
kemas disusun menjadi beberapa tingkat. Hal ini diperlukan untuk menghemat
tempat di pelabuhan. Peti kemas diangkat dengan menggunakan lengan
penyangga hidrolik. Lengan penyangga ini akan memanjang atau memendek saat
proses pengangkatan. Boom juga akan memanjang/ memendek pada saat
mekanisme angkat. Mekanisme ini sangat mengutamakan sistem hidrolik untuk
kemampuan mengangkat peti kemas. Adapun elektro motor digunakan hanya
untuk menggerakkan spreader agar peti kemas selalu dalam keadaan seimbang.
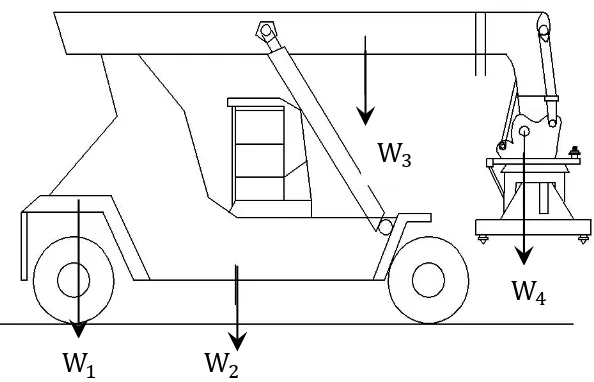
2.6 Gaya Pada Reachtacker
Pada dasarnya gaya yang terjadi akibat adanya suatu perlakuan baik itu
secara diam ataupun bergerak. Reachstacker yang merupakan alat pengangkat
beban dimana banyak terdapat gaya-gaya yang bekerja pada mobil reachstacker,
lengan/boom reachstacker, penyangga hidrolik pada lengan reachstacker. Dimana
gaya-gaya yang terjadi pada reachstacker yang nantinya akan menimbulkan
Gambar. 2.7 gaya-gaya pada reachstacker
Gambar. 2.8 gaya-gaya pada mobil reachstacker
W
2W
1W
3W
44
N
FF
bxF
by2
N
RF
RearW
2W
1F
ay [image:30.595.82.468.355.648.2]Gambar. 2.9 gaya-gaya pada lengan raechstacker
Gambar.2.10 gaya-gaya pada batang penyangga
1. Bagian mobil reachstacker
Bagian mobil reachstacker merupakan bagian yang menopang seluruh
komponen yang ada. Pada mobil reachstacker terdapat gaya gaya yang secara
langsung mempengaruhi kestabilan dari seluruh komponen pada reachstacker.
Gaya gaya yang terjadi meliputi gaya normal yang ada pada bagian roda seperti
W
3F
cF
ayF
axW
4b
c
���
��� ���
��� ���
[image:31.595.139.461.241.549.2]pada gambar 2.8. Bila gaya normal yang terjadi pada masing masing roda bernilai
negatif itu berarti terjadi jungkir atau tidak seimbang pada reachstacker.
2. Bagian lengan/ boom
Bagian lengan pengangkat memiliki dua posisi tumpuan yaitu titik a dan
titik c. adapun gaya lain yang terjadi berupa gaya yang berasal dari berat lengan
penyangga itu sendiri maupun yang berasal dari berat peti kemas dan komponen
pengangkat spreader dan trolley. Gambar 2.9 menunjukkan gaya yang terjadi
pada lengan/ boom pengangkat
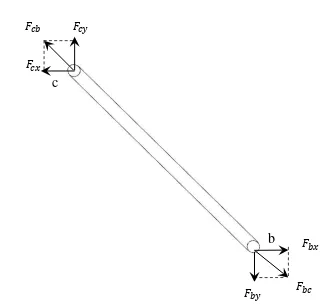
3. Bagian penyangga hidrolik
Bagian penyangga hidrolik merupakan batang dua gaya. Gaya yang terjadi
sama besar dan berlawanan arah. Sudut yang terjadi pada lengan penyangga
hidrolik dengan permukaan tanah disebut sudut β. Gambar 2.10 menunjukkan
diagram gaya yang terjadi pada lengan penyangga hidrolik
2.7 Persamaan Keseimbangan
Persamaankeseimbanganpada reachstacker merupakan hal yang paling
utama diketahui sebelum melakukan analisis menyeluruh tentang mekanisme gaya
yang terjadi.
Dengan menggunakan rumus dasar gaya yaitu :
F = m • a (1.1)
Dimana : F = gaya (N)
m = massa (kg)
dapat ditentukan suatu persamaan keseimbangan benda bebas yang menjadi dasar
bagi analisis keseimbangan pada reachstacker.
Pada saat reachstacker berjalan dangan mengangkat beban maka persamaan
keseimbangan yang dapat digunakan untuk komponen sumbu x yaitu :
∑ Fx = m • ax
dimana ax merupakan percepatan yang terjadi pada reachstacker yang
sedang bergerak. Untuk komponen gaya pada sumbu y digunakan rumus
∑ Fx = 0;
∑ Fy = 0;
∑ M = 0
Nilai 0 disebabkan karena perubahan percepatan yang terjadi pada gerakan
vertical reachstacker sangat kecil sehingga bisa diabaikan.
2.8 Gaya dan Momen Pada Tumpuan
Ketika suatu batang dibebani dengan gaya atau momen, tegangan internal
terjadi pada batang. Secara umum, terjadi tegangan normal dan tegangan geser.
Untuk menentukan besarnya tegangan-tegangan ini pada suatu bagian atau titik
tersebut dan menentukan besarnya resultan pada tumpuan dapat menggunakan
persamaan-persamaan kesetimbangan.
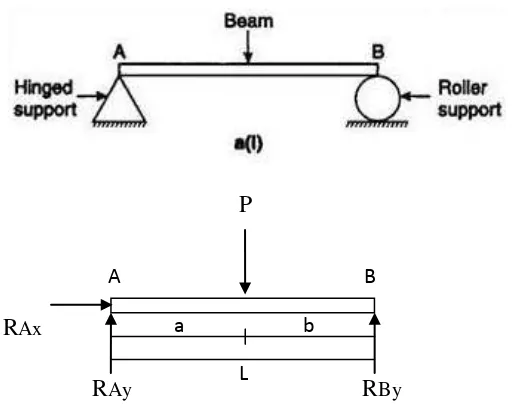
Berikut ini adalah contoh analisa 1 dimensi arah x untuk menentukan arah
P
RAx
[image:34.595.184.442.81.286.2]RAy RBy
Gambar. 2.11 Free Body Diagram kesetimbangan gaya dan momen
Dari diagram benda bebas diatas akan didapatgaya–gaya reaksi yang
bekerja pada tiap tumpuan yangterlihat pada persamaan dari gambar 2.11 :
∑�� = 0
�� − ���(�) = 0
��� (�) = ��
���
=
���∑�� = 0
���+ ���− � = 0
��� =� − ���
��� =� −
��
�
���
=
��
�
Persamaan momen untuk batasan0 ≤ � ≤ �
A B
a b
���
���
∑� = 0
� − ���(�) = 0
� = ���(�)
� = �� � (�)
Dan untuk persamaan gaya geser diperoleh :
∑�� = 0
���− � = 0
� = ���
� =
��
�
Sedangkan persamaan momen untuk batasan� ≤ � ≤ �
∑�� = 0
�+�(� − �)− ���(�) = 0
� = ���(�)− �(� − �)
v M
x
Nx
��� Nx
M
x
a v
���
� =
��
�
(�)− �(� − �)Dan untuk persamaan gaya geser diperoleh :
∑�� = 0
���− � − � = 0
� = ��� − �
� =
��
�
− � =−��
�
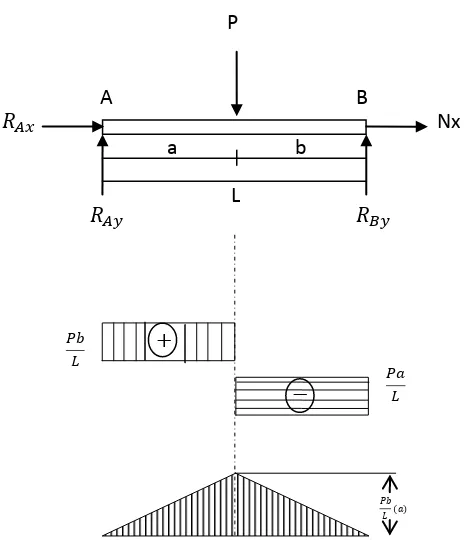
Dari hasil penurunan persamaan diatas untuk momen dan gaya geser akan
didapat bentuk diagram untuk masing-masing persamaan momen dan gaya geser
dimana gambar yang dihasilkan berdasarkan bentuk dari diagram benda bebas
[image:36.595.175.407.430.700.2]pada gambar 2.12 :
Gambar 2.12 Diagram gaya geser dan momen lentur
�� � �� � �� �(�) − + ��� ��� ���
A B
L
a b
2.9 Tegangan
Konsep paling mendasar dalam mekanika bahan adalah tegangan dan
regangan. Dalam konsep ini dapat diilustrasikan dalam bentuk meninjau sebuah
batang yang mengalami gaya . Batang adalah sebuah element struktural lurus
yang mempunyai penampang konstan diseluruh panjangnya. Gaya aksial adalah
beban yang mempunyai arah sama dengan sumbu elemen, sehingga
mengakibatkan terjadinya tarik atau tekan pada batang. Tegangan dapat
didefinisakan sebagai tahanan terhadap gaya-gaya luar. Ini diukur dalam bentuk
gaya yang ditimbulkan persatuan luas. Tegangan yang tejadi dalam sistem suatu
benda dapat dikelompokkan ke dalam dua kategori, yakni Tegangan Normal
(Normal Stress) dan Tegangan Geser (Shear Stress). Tegangan normal adalah
tegangan yang mempunyai arah yang tegak lurus permukaan potongan. Jadi
tegangan normal dapat berupa tarik atau tekan. Sedangkan untuk tegangan geser
adalah tegangan yang bekerja sejajar terhadap permukaan potongan.
Sebuah benda yang mendapat pembebanan, maka benda tersebut mendapat
gaya yang diperoleh dari luar yang disebut dengan gaya luar. Gaya luar yankni
yang terdiri dari gaya berat, gaya reaksi dan gaya yang diberikan (load).
Sedangkan gaya yang diperoleh dari dalam disebut gaya dalam. Gaya dalam
terdiri dari gaya normal, gaya geser dan momen lentur.
2.9.1 Tegangan Satu Arah (Uniaxial)
Tegangan uniaxial terjadi jika suatu batang yang mendapat gaya dan tegngan yang terjadi hanya satu arah saja. Keadaan tegangan ini terjadi pada suatu
Q
θ
dianggap bahwa tegangan berbagi rata diseluruh penampang . pada suatu elemen
[image:38.595.175.440.164.240.2]luas yang normalnya searah sumbu x bekerja tegangan normal.
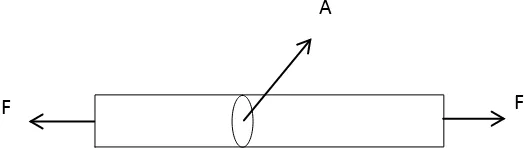
Gambar. 2.13 batang yang mendapatkan gaya tarik,
Dari gambar 2.14 dapat diambil sebuah kesimpilan dalam menentukan formula
untuk mencari nilai suatu tegangan yang terjadi pada suatu batang. Persamaan
formula tersebut adalah
�
=
��dimana:
σ
= tegangan (N/m2) F = gaya (N)A = luas penampang (�2)
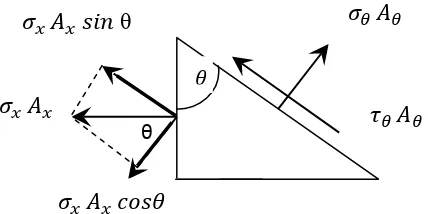
Tegangan Satu Arah Dengan Penampang Miring.
Jika pada batang yang berpenampang miring mendapat gaya dengan satu
arah terhadap sumbu x, dimana tegangan terjadi hanya satu arah maka tegangan
maksimum yang terjadi pada batang dengan sisi miring tersebut dapat diperoleh
dari persamaan dengan menjabarkan tegangan pada gambar
A
F F
A
S F
θ
Gambar. 2.14 batang dengan penampang miring
Persamaan keseimbangannya untuk tegangan maksikmal pada tegangan satu arah
dengan penampang miring :
untuk menetukan nilai ��dapat kita cari dari :
����= �� ��
�� = �� ����
maka untuk mendapatkan persamaan tegangan normal :
�� �� − �� �� cos θ = 0
�� �� = �� �� cos θ
�� �� = �� (�� cos θ) cos θ �� =�� ���2θ
Jadi persamaan untuk tegangan maksimal satu arah dengan penampang miring
adalah
��= �� �����θ θ
�� ��
�� �����θ �� ��
�� ��
�� ������
�
�� � ��
Untuk menentukan nilai tegangan geser yang terjadi pada penampang batang yang
mendapat tegangan satu arah. Maka dapat dicari persamaan untuk tegangan
gesernya :
���� +���� ����= 0
���� =−���� ����
���� =−���� ��������
�� =−����������
Melalui persamaan Cosinus diketahui bahwa :
���2� = 2��������
�������� = 1
2 ���2�
Maka, didapatkan persamaan tegangan tarik sebagai berikut.
�� = ����������
�� = ���������
Persamaan lingkaran mohr Dimana : cos2 θ = ½ (1 + cos 2 θ)
sin2 θ = ½ (1 - cos 2 θ)
sin θ cos θ = ½ sin2 θ
maka : �� =�� ���2 2θ =�� (
1 2 +
1
2 cos 2θ)
�� =�2� +�2� cos 2θ (1)
�� = �2� ���2� (2)
( �� − ��
2 )
( �� 2 )
�
O M
B
B’
2� ��
��
�� �
Maka �2=��2+ ��2 pada penumlahan yang sama sehingga akan
menghasilkan :
(��− �2� )2 =(�2� cos 2θ)2
�� = �2� ���2�
(��− �� 2 )2
+ �
� =(�2� cos 2θ)2 + (�2� sin 2θ)2
(��− �2� )2 + ��=( �2� )2 (x-a)2 + y2 = r2 ,
[image:41.595.109.483.83.702.2]persamaan lingkaran
Gambar .2.15 lingkaran mohr tegangan satu arah
Untuk mendapatkan tegangan optimasi/maksimum, dengan persyaratan dimana :
���
�� = 0
� �� �
��
2 +
��
2 cos 2θ�= 0
0-2 ���
2 sin 2θ�= 0
- (��sin 2θ)=0
sin 2θ = 0
��
Θ = 0
Θ = 0, 90, 180
Tegangan maksimum
���� =�� +��′
Sehingga �� maksimum pada Θ = 0
�� =�2� +�2� cos 2θ
�� =�2� +�2� (1)
�����= ��
Begitu pun untuk sudut 180 dan 360
2.9.2 Tegangan Dua Arah (Biaxial)
Berpijak pada gambar 2.14, dimana sebuah batang mendapat gaya dan titik
a
b c
[image:43.595.92.521.153.339.2]titik C pada gambar. 2.14 diperbesar untuk penjabaran tegangan yang terjadi dua arah.
Gambar.2.16 tegangan pada sebuah batang
Dengan menggunakan hubungan giniometri :
cos2 θ = ½ (1 + cos 2 θ)
sin2 θ = ½ (1 - cos 2 θ) sin θ cos θ = ½ sin2 θ
Dari gambar 2.16 didapat persamaan untuk mencari nilai suatu tegangan yang
terjadi pada suatu batang dua arah. Maka persamaan yang didapat:
�� ��� − �� ��� cos θ - �� ��� sin θ =0 �� ��� =�� ��� cos θ + �� ��� sin θ
�� ��� = ��(��� cos θ) cos θ + ��(��� sin θ) sin θ ���= �� cos2θ + �� sin2θ
��= 12 (�� + ��) + 12 (�� − ��) cos 2θ
Jadi persamaan untuk menetukan tegangan maksimal pada tegnagan dua arah
adalah x n θ �� �� θ ���� �� ��� �� �����θ �� ������ �� ��� θ �� ������ �� �����θ �� ��� a
b c
��= �� (�� + ��) + �� (�� − ��) cos 2θ
Untuk menentukan nilai tegangan geser yang terjadi pada penampang batang yang
mendapat tegangan dua arah. Maka dapat dicari persamaan untuk tegangan
gesernya :
���� − �� ��� sin θ + �� ��� cosθ =0 ���� = �� ��� sin θ - �� ��� cosθ
���� =��(��� cos θ) sin θ - ��(��� sin θ) cos θ ���� = (�� − ��) sin θ cos θ
�� = �� (�� − ��) sin 2θ Persamaan lingkaran Mohr
��= 12 (�� + ��) + 12 (�� − ��) cos 2θ
�� +12 (�� + ��) = 12 (�� − ��) cos 2θ (1)
�� = 12 (�� − ��) sin 2θ (2)
Dilakukan penjumlahan antara persamaan I dan II dan kemudian di kuadratkan.
�� +12 (�� + ��) = 12 (�� − ��) cos 2θ
( �� + 1
2 (�� + ��)2 + ��2 = ( 1
2(�� − ��) ��� 2�)2+ ( 1
2 ��� − ������ 2�)2
( �� + 12 (�� + ��)2 + ��2= ( �� −��
2 )2
( x - a )2 + ( y - b )2 = r2
( x - a )2 + ( y )2 = r2
( �� − ��
2 )
( �� + ��
2 )
( ��)
�
B M
E
E’
O 2� ��
[image:45.595.169.454.154.443.2]( ��) �� �
Gambar .2.17 lingkaran mohr tegangan dua arah
��= 12 (�� + ��) + 12 (�� − ��) cos 2θ
OC = OM + MC’ cos 2�
�� = 12 (�� − ��) sin 2θ
CC’ = MC sin 2�
Untuk mendapatkan tegangan optimasi/maksimum, dengan persyaratan dimana :
���
�� = 0
�
�� � (�� + ��) + 1
2 (�� − ��) ��� 2��= 0
0-2 ��� −��
2 sin 2θ�= 0
- ��� − ���sin 2θ =0
sin 2θ = 0
Θ = 0, 180, 360
Tegangan geser maksimum
���
�� = 0
� �� �
1
2 (�� − ��) ��� 2��= 0
2 ���−��
2 cos 2θ�= 0
cos 2θ =0
Θ = 90, 270,
2.9.3 Tegangan Maksimum/Utama (Pricipal Stress Maximum)
Tegangan maksimum atau minimun pada suatu batang dapat digambarkan
pada sebuah elemen yang mendapat beban seperti pada gambar 2.14. Dimana
penjabaran tegangan yang terjadi dapat diuraikan sehingga nantinya memdapatkan
persamaan minimum dan maksimun untuk mencari nilai suatu tegangan. Pada
prinsipnya, tegangan maksimum atau minimum dapat dicari menggunakan
lingkaran morh. Dimana lingkaran tegangan mohr sangat luas dipergunakan
dalam praktek transformasi tegangan. Ordinat dari sebuah titik pada lingkaran
didapat σ1 merupakan tegangan maksimum sedangkan σ2 merupakan tegangan
minimum. Sehingga akan dijabarkan tegangan-tegangan yang terjadi, sehingga
untuk mendapatkan persamaan agar lebih mudah.
Gambar.2.18 tegangan umum yang terjadi
Dari gambar 2.18 dimana :
dAx = ��� cos θ dAy = ��� sin θ 2 τxy dA cos θ sin θ
sehingga persamaan pada �� ���
�� ��� - σx dAxcos θ - σy dAy sin θ + 2 τxy dA cos θ sin θ =0 �� ���= σx dAxcos θ + σy dAy sin θ - 2 τxy dA cos θ sin θ
�� = σx ( cos θ) cos θ + σy ( sin θ)sin θ - 2 τxy cos θ sin θ
= σx cos2θ + σy sin2θ - 2 τxy cos θ sin θ
- σx dAx sin θ + σy dAy cos θ - τxy d ( cos2θ - sin2θ)=0
= σx dcos θ sin + σy d sin θ cos - τxy dA( cos2θ + sin2θ)
= ( σx - σy ) sin θ cos + τxy ( cos2θ + sin2θ) = ½ ( σx - σy ) sin 2θ + τxy cos 2θ
Persamaam lingkaran Mohr
= ½ ( σx + σy ) +½ ( σx - σy ) cos 2θ - 2 τxy sin 2θ
+ ½ ( σx + σy ) =½ ( σx - σy ) cos 2θ - 2 τxy sin 2θ (1) = ½ ( σx - σy ) sin 2θ + τxy cos 2θ
(2)
Dilakukan penjumlahan antara persamaan I dan II dan kemudian di kuadratkan.
{( + ½ ( + ) }2 + 2 =
(1
2( − )2− 2 2) 2+ {1
2 ( − )2+ 2}2
( + 1
2 ( − ) 2 +
2 =( −2 )2 + 22
( x - a )2 + ( y - b )2 = r2( x - a )2 + ( y )2 = r2
Sehingga Tegangan Tarik Utama Maximum adalah :
= �+
2 �+�
−
2 �2−22
= �+ 2 �+�
−
2 �
2
2−2
2 2
= �+ 2 �+�
−
2 � −2
= �+ 2 �+�
−
2 � −2�
−�
= +
2 +��
−
2 �
2
= +
2 − ��
−
2 �
2
+ 2
sehingga terbentuk persamaan tegangan von mises masksimum
minimum tegangan:
1,2 = +
2 ±��
−
2 �
2
+ 2
Untuk mendapatkan tegangan optimasi/maksimum, dengan persyaratan dimana :
=0
Kemudian dideferensialkan terhadapat θ
maka d /dθ = 0
= ½ ( + ) +½ ( − ) 2 − 22 ′
= −
−
2 (2sin2) + 22 = 0 −( − )2 − 22= 0
tan2= 2 (−)
Tegangan geser maksimum
=0
( ½ ( − ) 2 + 2) =0
2 �−
cot2= 2 (−)
Sehingga Tegangan Geser Maximum Utama adalah :
= �−2 �2+2
=
�
−2
�
2
2
+
2
2
=
�
− 2� �
�−2�
�
+
=��−2�
2
+
22.9.4 LingkaranMohr Tegangan Utama
Lingkaran mohr untuk tegangan utama dibentuk dari persamaan dasar dari
lingkaran dengan menjumlahkan persamaan pada tegangan tarik utama dan
tegangan geser utama.Persamaan yang diperoleh merupakan dasar untuk
membentuk lingkaran.Tegangan maksimum dan minimum dapat dihitung melalui
perhitungan untuk titik terjauh pada lingkaran sepanjang sumbu x dan tegangan
tarik utama minimum dapat dihitung melalui penentuan titik terdekat pada sumbu
[image:50.595.119.372.159.324.2]x. Persamaan – persamaan tersebut dapat dilihat pada lingkaran mohr pada
gambar 2.19.
BAB III
METODE PENELITIAN
3.1.Pendahuluan
Dalam Bab ini berisikan metodologi yang digunakan untuk menyelesaikan
permasalahan pada skripsi ini.Secara umum metodologi yang digunakan dalam
skripsi ini menjabarkan pembagian titik hitung, dimana titik-titik tersebut sebagai
acuan perhitungan data. Kasus yang terjadi di pada lengan reachstacker biasanya
terdiri dari human error. Oleh karena itu metologi perhitungan ini digunakan
untuk mencari tegangan maksimum yang terjadi.
Dalam skripsi ini dilakukan studi kasus perhitungan tegangan pada lengan
reachstacker dalam keadaan statis ,dimana data dapat diketahui pada pembahassan
selanjutnya.
3.2.Studi Kasus 3.2.1.Spesifikasi
Dalam penelitian ini, subjek penelitian adalah mobil crane peti kemas atau
reachstacker . Adapun data spesifikasi sebagai berikut:
Daya, putaran = 246 kW, 2000 rpm
Tipe boom = 2 seksi teleskopik
Mmaks = Berat kendaraan = 68400 kg
u = jarak maksimum spreader dari tanah = 15 m
l = wheel base = 5,9 m
m = Panjang lengan/ boom(pendek/ panjang) = 9,3/16,06 m
o = Lebar keseluruhan,20feet/40feet = 6,04/12,17 m
p = Panjang Keseluruhan dengan lengan = 11,5 m
r = jarak roda terluar = 4,2 m
s = panjang mobil = 8 m
t = jarak titik berat beban ke roda depan = 1,9 m
[image:52.595.76.565.81.755.2]
3.2Pelaksanaan Penelitian
Secara garis besar pelaksanaan penelitian ini akan dilaksanakan berurutan dan
[image:53.595.152.474.154.710.2]sistematis,seperti ditunjukkan pada gambar 3.2
Gambar 3.2 diagram alir penelitian
SELESAI
KESIMPULAN
Ya Tidak
START
Indentisifikasi masalah dan menetapkan tujuan l
STUDI AWAL:
Studi literatur
PENGUMPULAN DATA:
- Kapasitas angkat
- Panjang Lengan
Analisa data
- Gaya Normal
- Gaya Geser
3.3. Urutan Proses Analisis
Untuk melakukan analisis pada skripsi ini, maka dibuat urutan proses agar dalam
pengerjaan tugas akhir ini dapat berjalan baik. Urutan ini dilakukan oleh penulis dimulai
dari awal hingga pembahasan tentang materi tugas akhir ini.
3.3.1 Latar Belakang
Latar belakang yang didalamnya mencakup titik awal sebagai identifikasi
masalah pada bahasan skripsi ini. Sehingga latar beakang ini akan menjadi
pembahasan.
3.3.2 Studi Literatur
Untuk mendapatkan informasi yang berkenaan dalam penyelesaian
masalah ini, maka dilakukan studi literatur.Informasi berkenaan masalah ini
diperoleh dari buku-buku dan jurnal-jurnal yang berhubungan dengan skripsi ini
secara umum yang diperoleh dari berbagai sumber.
3.3.3 Pengumpulan Data
Data data yang didapat maka dikumpulkan untuk dilakukan pengolahan
yang selanjutnya akan dilakukan analisa perhitungan
3.3.4 Pembahasan
Dari hasil analisis,beban yang diberikan pada sistem perpipaan, dapat
ditentukan apakah beban yang diterima melebihi dari batas yang diijinkan atau
tidak. Adapun proses pengerjaan dinyatakan dalam diagram alir sebagai berikut.
3.3.5 Kesimpulan
setelah analisa dilakukan dan kemudian ditetntukan kesimpulan akhir
3.4 Penentuan Titik Perhitungan Gaya Dan Tegangan
Pada pembahasan lengan reachstacker dimana akan dibagai dalam tiga
titik. Titik-titk ini sebagai acuan perhitungan tegangan, gaya dan data nilai
lainnya. Sehingga dalam setiap panjang yang akan dihitung,maka terbagi oleh tiga
titik. Berikut ini adalah pembagian titik dan gambar free diagram body
keselurahan lengan. Dimana, nanti akan dipecah dalam tiga bagian sehingga
dilakukan perhitungan secara super posisi.
3.5 Gaya Gaya Yang Terjadi Pada Reacshtacker
Pada reachstacker dalam keselurahannya akan di tentukan gaya gaya yang
terjadi. Baik itu meliputi gaya luar, gaya dalam. Gaya luar meliputi dari gaya
berat, gaya reaksi, dan gaya yang diberikan (load), sedangkan gaya dalam yang
terjadi pada reachstacker meliputi gaya normal (N), gaya geser (V), momen (M).
berikut ini adalah gabar dari gaya gaya yang terjadi pada reachstacker baik secara
[image:55.595.134.453.528.711.2]kjeseluruhan maupun secara terpisah.
Gambar 3.3 Gaya luar reachstacker pada posisi idle
W
2W
1W
3���� ���� ��� �3 �4 �� �� �� α α α x1 α
�4cos α
�4sin α
�3sin α
[image:56.595.134.517.89.296.2]������α �����α ������α ������α α α α α ��
Gambar 3.4 Gaya luar lengan pada posisi idle
Gambar 3.5 gaya luar dan gaya dalam pada lengan reachstacker dengan sudut α
W3 W4 ��� R3 R1 R2 ��� �� y x y1
����cos α
����cos α
����sin α ����sin α
�3cos α
β
[image:56.595.49.538.151.668.2]�1 α �� �� �� α α ������α ������α ������α ������α A �� α α
3.5.1 Tegangan Dan Gaya Pada Panjang (l) Pada Titik Satu (X1)
Pada titik pertama ini (X1) dimana menghasilkan bentuk free diagram
body sebagai berikut. Persamaan yang didapat pada digram body ini nanti akan menjadi persamaan untuk menghiung gaya pada titik satu (X1). Dimana skala
pada titik satu ini berada antara titik 0 sampai pada titik penumpu lengan hidrolik
[image:57.595.47.401.278.562.2]yaitu 0 < x1 < 3,15.
Gambar 3.6 free body diagram untuk titik 1 (satu)/ x1
Keterangan :
x1 adalah nilai rata-rata dari 0 < x1 < 3,15(m) VA adalah gaya geser (N)
NA adalah gaya Normal (N)
MA adalah momen inesrsia (Nm)
y
x
�′
�′
�2 �1 α �� �� �� α α ������α ������α ������α ������α A α α α α �� �� ���
3.5.2 Tegangan Dan Gaya Pada Panjang (l) Pada Titik Dua (X2)
Pada titik kedua ini (X2) dimana menghasilkan bentuk free diagram body
sebagai berikut. Persamaan yang didapat pada digram body ini nanti akan menjadi
persamaan untuk menghiung gaya pada titik dua (X2). Dimana skala pada titik dua ini
berada antara titik pada titik penumpu lengan hidrolik sampai pada setengah dari
panjang lengan yaitu 3,15 < x2 <
[image:58.595.63.526.287.646.2]1 2l.
Gambar 3.7 free body diagram untuk titik 2 (dua)/ x2 α y x �1 �1 β
����sin α
���� cos α
����sin α
����cos α ����
�3 �1 α α �� �� �� α α ������α ������α ������α ������α A α α α α �3
�3���α
α
�3���α �2
��
��
Keterangan :
x2 adalah 3,15 < x2 <
1 2l(m) VA adalah gaya geser (N)
NA adalah gaya Normal (N)
MA adalah momen inesrsia (Nm)
3.5.3 Tegangan Dan Gaya Pada Panjang (l) Pada Titik Tiga (X3)
Pada titik ketiga ini (X3) dimana menghasilkan bentuk free diagram body
sebagai berikut. Persamaan yang didapat pada digram body ini nanti akan menjadi
persamaan untuk menghiung gaya pada titik tiga (X3). Dimana skala pada titik
tiga ini berada antara titik pada setengah dari panjang lengan sampai ujung
panjang lengan yaitu 1
[image:59.595.73.565.382.741.2]2 l < x3<.l
Gambar 3.8 free body diagram untuk titik 3 (tiga)/ x3 α y x �1 �1 β
����sin α ����sin α
���� ���α
Keterangan :
x3 adalah
1
2l < x3 < l (m) VA adalah gaya geser (N)
NA adalah gaya Normal (N)
BAB IV ANALISA DATA
Pada bab ini akan dibahas perhitungan dan analisis gaya luar dan
kesetimbangan mekanisme pengangkat yang terjadi pada reachstacker. Terdapat
banyak kondisi yang dialami oleh mesin pengangkat reachstacker, oleh karena itu
diambil kondisi yang mewakili seluruh kerja dari reachstacker tersebut. Kondisi
kerja yang terjadi pada reachstacker dibagi atas 6 kondisi. Keenam kondisi ini
diasumsikan karena jumlah tingkat dari peti kemas yang bisa diangkat oleh
reachstacker adalah 5 tingkat peti kemas ditambah satu kondisi idle.
4.1 Analisis Gaya Kesetimbangan Pada Kondisi Idle
Kondisi idle reachstacker merupakan kondisi dimana lengan pengangkat
tidak mengangkat beban dan posisi lengan sejajar dengan permukaan tanah.
Analisis pada kondisi idle sangat diperlukan agar dapat dijadikan landasan
perhitungan pada kondisi kondisi selanjutnya. Gambar 3.1 menunjukkan gaya
[image:61.595.147.465.513.712.2]gaya luar yang terjadi pada reachstacker dalam kondisi idle.
Gambar 4.1 Gaya luar reachstacker pada posisi idle
W
2W
1W
3Keterangan :
Frear gaya gesek pada permukaan tanah dengan ban belakang
Nr gaya normal roda belakang
Nf gaya normal roda depan
W1 berat mobil reachstacker
W2 berat counter balance
W3 berat lengan pengangkat
W4 berat spreader + trolley
Dari gambar 3.1 analisa gaya yang terjadi pada reachstacker dapat pecah menjadi
beberapa bagian. Bagian tersebut dapat dipisahkan menjadi tiga bagian besar yaitu
4. Bagian lengan/ boom
Bagian lengan pengangkat memiliki dua posisi tumpuan yaitu titik
a dan titik c. adapun gaya lain yang terjadi berupa gaya yang berasal dari
berat lengan penyangga itu sendiri maupun yang berasal dari berat peti
kemas dan komponen pengangkat spreader dan trolley. Gambar 4.2
[image:62.595.79.484.582.711.2]menunjukkan gaya yang terjadi pada lengan/ boom pengangkat
Gambar 4.2 Gaya luar lengan pengangkat pada posisi idle ��
���
���
��
Analisa gaya pada lengan pengangkat
Dengan menggunakan persamaan 2.4 maka dapat dihitung kesetimbangan
pada reachstacker. analisa dibagi menjadi dua bagian besar yaitu pada bagian
lengan lalu analisa kesetimbangan pada bagian mobil reachstacker
Dari data survey didapat :
° =60
maks
α
N
G=49050 (berat trolley dan komponen pengait spreader)
W = m . g
W = 40000 kg x 9,81 = 392400 N
dimana :
α, yaitu sudut lengan pengangkat maksimum terhadap garis horizontal
G, yaitu berat trolley dan spreader (komponen pengait peti kemas)
W, yaitu berat peti kemas dengan kapasitas maksimum 40 ton
Dengan menggambarkan gaya gaya yang bekerja pada lengan pengangkat, maka
[image:63.595.131.518.518.706.2]didapat diagram benda bebas pada gambar 4.3.
Dimana :
W4, adalah berat beban petikemas dengan paralatan trolley dan spreader
Berat maksimum petikemas 40000 kg = 392400 N
Berat trolley + spreader 10000 kg = 98100 N
karena pada saat kondisi idle reachstacker tidak dalam keadaan mengangkat beban
maka W4 = 98100 N
W3, adalah berat lengan pengangkat sebesar 10000 kg = 98100 N
Fcb, adalah gaya tekan hidrolik untuk mengangkat beban
R1, adalah panjang lengan pengangkat yaitu 9,5-15,5 m
R2, adalah koordinat x titik berat lengan pengangkat yaitu R1/2 m
R3, adalah jarak lengan penyangga hidrolik ke tumpuan yaitu 3,15 m
Panjang lengan penyangga hidrolik maksimum yaitu 6,5 meter dan
minimum yaitu 3,5 m. Untuk sudut antara penyangga hidrolik dengan sumbu x
dapat ditentukan melalui verifikasi berdasarkan panjang lengan penyangga
hidrolik. Hasil verifikasi sudut pada lengan Fcb terlihat pada gambar 4.5
[image:64.595.204.442.520.757.2]Tabel 4.1 veriikasi sudut
Lengan (o) Hidrolik (o)
Min
0 56
Angkat 1
10 60
Angkat 2
20 62
Angkat 3
30 62
Angkat 4
40 62
Angkat 5
50 60
Max
60 59
Dari gambar 4.4 terlihat sudut cb dengan garis horizontal membentuk sudut.
Sudut yang terjadi tidak banyak mengalami perubahan. Panjang lengan hidrolik
yaitu 3,5 m dan panjang maksimum lengan penyangga hidrolik yaitu 6,5 m.
Maka persamaan kesetimbangan pada boom pengangkat dapat dilihat pada
gambar 3.5, maka diperoleh :
∑�� = 0
Fax − Fcb cos 56 = 0
∑�� = 0
-Fay − Fcb sin 56 − W3 − W4= 0
-Fay + Fcb sin 56 = 196200 N
-W4. R1 −W3. R2+ Fcb sin 56 . R3 − Fcb cos 56 . R4 = 0
Dimana : R1 yaitu panjang lengan sebesar 9,5 m
R2 yaitu jarak titik tumpu ke titik berat lengan sebesar 4,8 m
R3 yaitu jarak titik tumpu ke titik penyangga hidrolik 3,15 m
R4 yaitu jarak proyeksi y titik tumpu ke titik penyangga 3,15 sin α
maka didapat :
Fcb = 535,3 kN
Dengan mensubstitusikan persamaan 3 ke 1 didapat nilai
Fax = 299,34 kN
Dengan mensubstitusikan persamaan 3 ke 2 didapat nilai
Fay = 247,59 kN
4.2 Analisis Gaya Padai Pada Lengan Pengangkat
Pada lengan reachstacker mengalami pembebanan yang terjadi akibat
adanya gaya-gaya yang bekerja pada lengan tersebut. Dimana pembebanan ini
muncul karena adanya gaya berat dari lengan dan beban petikemas ditambah
dengan beban komponen pengikat spreader beserta trolley. Analisis ini dilakukan
berdasarkan panjang lengan dan sudut yang berubah dengan beban maksimum
tetap. Dimana panjang lengan dimulai dari 11meter sampai dengan 15,5 meter
dengan interval 0,5. Sedangkan sudut yang dipakai mulai dari 100 sampai sudut
maksimuk lengan yaitu 600 . Namun ada beberapa panjang lengan yang di hitung
tidak mulai dari sudut 100.berdasarkan pembebanan yang terjadi pada lengan
reachstacker, maka didapat penjabaran gaya-gaya yang dialami oleh lengan
�1 α �� �� �� α α �����α �����α �����α �����α A �� α α
super posisi. Dimana tiap panjang lengan yang akan dihitung dibagai dalam tiga
titik atau tiga bagian. Titik pertama/bagian pertama (X1), titik kedua/bagian kedua
(X2), kemudian titik ketiga/bagian ketiga (X3).
4.2.1 Analisis Gaya Dan Tegangan Pada Panjang X1
Pada analisis ini,akan dihitung gaya dan tegangan yang terjadi pada lengan
reachstacker dimana panjang lengan 15,5 meter dengan skala 0 < x1 < 3,15 meter
dengan sudut α sebesar 100 .
Dimana pada panjang 15,5 meter titik titik untuk menghitung tegangan dibagai
dalam tiga titik/ bagian. Yang pertama adalah titik satu (X1). Dengan Free
[image:67.595.63.396.408.698.2]diagram body sebagai berikut.
Gambar 4.5 free body diagram untuk titik 1 (satu)/ x1
y
x
�′
�′
α = 200
l = 15,5 meter , l1 = 7,75 meter untuk nilai r1 adalah.
0 < x1 < 3,15
= 1,575
r1 = 1,575 m
dengan