PROTOTYPE SISTEM PARKIR OTOMATIS MENGGUNAKAN
RFID DAN INFORMASI AREA PARKIR MELALUI PC
BERBASIS ATMEGA8535
SKRIPSI
AWALLINA ANJASNUARI TANJUNG
110821006
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PROTOTYPE SISTEM PARKIR OTOMATIS MENGGUNAKAN RFID DAN INFORMASI AREA PARKIR MELALUI PC
BERBASIS ATMEGA8535
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai Sarjana Sains
AWALLINA ANJASNUARI TANJUNG 110821006
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PROTOTYPE SISTEM PARKIR OTOMATIS MENGGUNAKAN RFID DAN INFORMASI AREA
PARKIR MELALUI PC BERBASIS ATMEGA8535
Kategori : SKRIPSI
Nama : AWALLINA ANJASNUARI TANJUNG
Nomor Induk Mahasiswa : 110821006
Program Studi : SARJANA (S1) FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, 26 Agustustus 2013
Diketahui/disetujui oleh
Ketua Departemen Fisika FMIPA USU Pembimbing
Dr. Marhaposan Situmorang Dr. Marhaposan Situmorang
PERNYATAAN
PROTOTYPE SISTEM PARKIR OTOMATIS MENGGUNAKAN RFID DAN INFORMASI AREA PARKIR MELALUI PC
BERBASIS ATMEGA8535
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing – masing disebutkan sumbernya.
Medan, Agustus 2013
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa, dengan limpah kurnia-Nya kertas kajian ini berhasil diselesaikan dalam waktu yang ditetapkan.
Pada kesempatan ini penulis menyampaikan ucapan terimah kasih kepada Bapak Dr. Marhaposan Situmorang selaku Dosen Pembimbing dan sekaligus Ketua Departemen Fisika FMIPA USU, disela-sela rutinitasnya namun tetap meluangkan waktunya untuk memberikan petunjuk, bombingan, saran dan arahan sejak rencana penelitian hingga selesainya penulisan skripsi ini. Ucapan terima kasih juga penulis sampaikan kepada Bapak Dr. Kerista Tarigan, M.Eng.Sc, Bapak Drs Kurnia Brahmana M.Si dan Bapak Junedi Ginting, S.Si, M.Si selaku dosen penguji yang telah memberi kritik dan sarannya untuk kebaikan skripsi ini, dan terima kasih banyak kepada Dekan dan Pembantu Dekan FMIPA USU serta semua dosen dan staf di Departemen Fisika FMIPA USU khususnya bang Jo. Ucapan terima kasih juga disampaikan kepada Senior-senior khususnya bang Oki Handinata dan bang Gilang Perkasa Rizki yang telah memberi informasi dan masukan penting dalam penyelesaian skripsi ini. Sahabat-sahabat sejurusan (Stambuk 2011) Fatimah, Sri Kesuma, kak Fitri, bang Ridho, Nawi, Irma, Maya, Rizal, Ulfa, Anto, Dika dan teman-teman dari Fisika Medis yang dengan penuh keikhlasan membantu penulis dalam kebersamaan kita selama menempuh hari-hari perkuliahan semoga tetap terjalin indah sebagai kenangan abadi selamanya. Direktur Utama PT. Trimurti Perkasa Bapak Ir. Pahot Tua Sihombing dan seluruh karyawan PT. Trimurti Perkasa Kak Rita, bang Douglas, bang Manto, Pak Yos, Pak Saul dan bang Budi terima kasih untuk doa dan supportnya serta kemudahan izin keluar yang di beri. Buat abang Yaumil Fahri, SE terima kasih atas doa dan support yang di berikan selama ini yang terus mendampingi penulis semasa perkuliahan sampai selsesainya skripsi ini.
Ucapan terima kasih yang tidak terhingga sebagai tanda bakti penulis khusus untuk Mama tersayang Rusnani dan Papa Alm.Jasrial Tanjung atas doa, kasih sayang serta bantuan tak terhingga baik secara materil maupun non materil yang telah diberikan pada penulis selama ini, buat adik-adik tersayang Dwi Anjalia Puspita Tanjung, Amd dan Tri Febrian Ramadhani Tanjung terima kasih buat doa dan dukungannya, Lulu, Bunda Wok, Nenek dan Kakek terima kasih untuk doa dan supportnya.
ABSTRAK
PROTOTYPE AUTOMATED PARKING SYSTEM USING RFID PARKING AREA AND INFORMATION THROUGH PC
BASED ATMEGA8535
ABSTRACT
DAFTAR ISI
1.4 Tujuan Penelitian 2
1.5 Manfaat Penelitian 3
1.6 Sistematika Penulisan 3
BAB 2 TINJAUAN PUSTAKA 5
2.1 Sensor Infra Merah 5
2.2 Fotodioda 7
2.3 RFID (Radio Frequency Identification) 8
2.3.1 Pengertian RFID 8
2.3.2 Jenis RFID 9
2.3.3 Sistem RFID 10
2.3.4Frekuensi Kerja RFID 12
2.3.5 Cara Kerja RFID 13
2.3.6 Format Data RFID 14
2.3.6.1 Format Data ASCII 14
2.3.7 Tingkat Akurasi Sistem RFID 15
2.4 Mikrokontroler ATMega8535 15
2.4.1 Arsitektur Mikrokontroler ATMega 8535 16
2.4.2 Konfigurasi Pin ATMega8535 19
2.5 Max232 20
2.6 Motor Stepper 21
2.6.1 Jenis Motor Stepper 22
2.7 ULN2803 23
BAB 3 RANCANGAN SISTEM 27
3.1 Diagram Blok Rangkaian 28
3.2 Rangkaian Power Supply 29
3.3 Rangkaian Mikrokontroler ATMega8535 33
3.4 Rangkaian Infra Merah dan Fotodioda 30
3.5 Rangkaian Motor Stepper 31
3.6 Rangkaian RFID Reader Modul 32
3.7 Rangkaian RS232 33
3.8 Flowchart Program 34
BAB 4 DATA DAN ANALISA DATA 36
4.1 Pengujian Power Supply 36
4.2 Pengujian Rangkaian Mikrokontroler ATMega8535 36 4.3 Pengujian Rangkaian Infra Merah dan Fotodioda 37
4.4 Pengujian Motor Stepper 40
4.5 Pengujian RFID Reader Modul 42
4.6 Pengujian Modul RS232 Konverter 44
4.7 Pengujian Rangkaian Keseluruhan 45
BAB 5 KESIMPULAN DAN SARAN 49
5.1 Kesimpulan 49
5.2 Saran 49
DAFTAR PUSTAKA 50
DAFTAR TABEL
Halaman Tabel 2.1 Perbandingan RFID Aktif, Semi-Pasif dan Pasif 10
Tabel 2.2 Data ASCII 14
Tabel 4.1 Hasil Pengukuran Vout Fotodioda 38
Tabel 4.2 Data Pulsa Penggerak Motor Stepper Membuka Palang 40 Tabel 4.3 Data Pulsa Penggerak Motor Stepper Membuka Palang 40
Tabel 4.4 Hasil Pengujian RFID 43
Tabel 4.5 Hasil Pengujian Pembacaan Tag RFID 43
DAFTAR GAMBAR
Gambar 2.5 Frekuensi yang dapat Digunakan RFID 12
Gambar 2.6 Skema Kerja Perangkat RFID 13
Gambar 2.7 Bentuk Fisik Mikrokontroler Atmega 8535 16
Gambar 2.8 Blok Diagram Fungsional ATMega 8535 18
Gambar 2.9 Pin ATMega8535 19
Gambar 2.10 Max-232 21
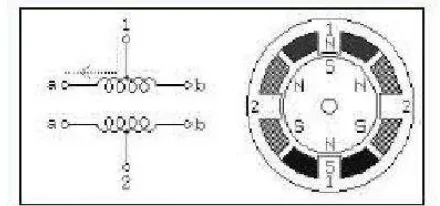
Gambar 2.11 Konstruksi Motor Stepper Unipolar 22
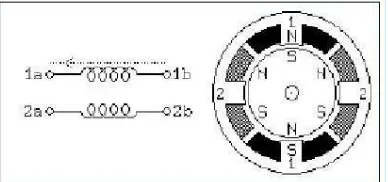
Gambar 2.12 Konstruksi Motor Stepper Bipolar 23
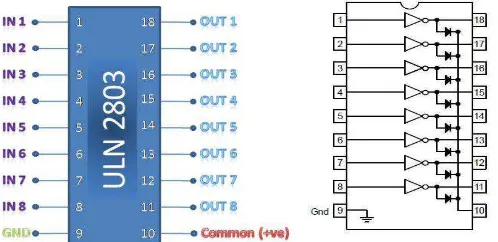
Gambar 2.13 ULN2803 24
Gambar 2.14 Konfigurasi Pin ULN2803 24
Gambar 2.15 Bentuk Fisik LM324 25
Gambar 2.16 Konfigurasi Pin LM324 26
Gambar 3.1 Diagram Blok Sistem 27
Gambar 3.2 Rangkaian Power Supply 28
Gambar 3.3 Rangkaian Skematik Minimum Mikrokontroler ATMega8535 29
Gambar 3.4 Rangkaian Infra Merah dan Fotodioda 30
Gambar 3.5 Motor Stepper Unipolar 31
Gambar 3.6 Rangkaian IC ULN2803 sebagai Driver Motor Stepper 31
Gambar 3.7 Rangkaian Reader RFID 32
Gambar 3.8 Max232 dalam Rangkaian 33
Gambar 3.9 Flowchart Program 34
Gambar 4.1 Informasi Signature Mikrokontroller 37
Gambar 4.2 Infra Merah dan Fotodioda 37
Gambar 4.3 Rangkaian pengujian Motor Stepper 42
Gambar 4.4 Tampilan Hyperterminal Pengiriman Data Serial 44
Gambar 4.5 Tampilan Awal Output pada PC 45
ABSTRAK
PROTOTYPE AUTOMATED PARKING SYSTEM USING RFID PARKING AREA AND INFORMATION THROUGH PC
BASED ATMEGA8535
ABSTRACT
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Perparkiran merupakan tempat yang penting dalam sebuah pusat perkantoran ataupun pusat perbelanjaan. Dimana pada saat ini sistem parkir dilakukan dengan cara manual sehingga keamanannya juga kurang memadai, maka diperlukan sistem pengawasan yang baik. Dengan pengaman ini, diharapkan dapat meningkatkan sistem keamanan secara efektif. Salah satu cara yaitu dengan menggunakan sensor RFID (Radio Frequency Identification) Reader pada area parkir. Hal ini dikarenakan kemudahan yang diberikan untuk menunjang keamanan.Beberapa penelitian menggunakan RFID yang pernah dilakukan antara lain adalah aplikasi transaksi voucer dan fingerprint
(Andi, 2011), Pengunci elektronis pada smart home (Amel, 2011) dan sistem penerapan aplikasi RFID di bidang Perpustakaan (Supriyono, 2010). Agar kendaraan lebih teratur dan tidak terlalu padat, biasanya tempat perparkiran ini dibagi menjadi beberapa tempat. Dengan demikian kendaraan yang diparkir akan lebih teratur dan keluar/masuknya kendaraan akan lebih mudah. Dengan menggunakan pc, dapat menginformasikan kepada pengendara untuk lokasi perparkiran yang masih memiliki tempat kosong dan lokasi perparkiran mana yang sudah penuh ataupun lokasi perparkiran tersebut sudah penuh sama sekali. Dengan demikian maka pengemudi tidak perlu berputar - putar mencari lokasi yang masih memiliki tempat kosong.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang ada, maka perumusan dari masalah pada penelitian ini, yaitu bagaimana merancang dan merealisasikan sistem parkir otomatis menggunakan rfid dan menginformasikan area parkir yang kosong menggunakan PC sebagai tampilan visual.
1.3 Batasan Masalah
Adapun yang menjadi batasan masalah pada penelitian ini adalah:
1. Mikrokontroler yang digunakan adalah mikrokontroller ATMega8535. 2. Sensor yang digunakan untuk informasi area parkir adalah infra merah dan
fotodioda.
3. Display yang menampilkan banyaknya tempat yang masih kosong adalah dengan tampilan PC.
4. RFID (Radio Frequency Identification) yang digunakan hanya pada band frekuensi rendah atau Band LF (Low Frequency).
5. Sebagai sampel digunakan 3 tag RFID.
6. Pintu / palang yang digunakan hanya simulasi dengan menggunakan motor stepper.
1.4 Tujuan Penelitian
Tujuan dilakukan penelitian ini adalah sebagai berikut:
1. Merancang suatu sistem keamanan parkir menggunakan RFID
2. Memanfaatkan mikrokontroler sebagai alat penghitung jumlah kendaraan roda 4 (empat) dalam lokasi perparkiran.
1.5 Manfaat Penelitian
Manfaat yang diharapkan dari sistem parkir otomatis ini antara lain, adalah:
1. Sebagai informasi bagaimana dasar membangun sebuah instrumen yang mampu mengatur sebuah lokasi perparkiran secara otomatis.
2. Mempermudah pengendara dalam memilih tempat untuk memarkirkan kendaraannya di dalam sebuah lokasi perparkiran.
3. Memodernisasi sistem perparkiran yang sudah ada selama ini sehingga menjadi lebih efisien.
4. Memberi keamanan pada kendaraan karena untuk masuk dan keluar dibutuhkan kartu RFID yang hanya bisa dimiliki oleh user yang terdaftar.
1.6 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika penulisan dalam skripsi ini sebagai berikut:
BAB 1. PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, tujuan penelitian, batasan masalah, manfaat penelitian serta sistematika penulisan.
BAB 2. LANDASAN TEORI
Landasan teori dalam bab ini dijelaskan tentang teori pendukung yang digunakan dalam pembahasan. Teori pendukung itu antara lain
mikrokontroler yang dipakai, cara kerja dari sensor, RFID, LM324, motor stepper, ULN2803 sebagai driver motor stepper.
BAB 3. PERANCANGAN SISTEM
BAB 4. DATA DAN ANALISA DATA
Pada bab ini meliputi hasil pengujian dari rangkaian dan cara kerja sistem serta penjelasan mengenai program yang digunakan.
BAB 5. KESIMPULAN DAN SARAN
BAB 2
TINJAUAN PUSTAKA
2.1 Sensor Infra Merah
Sinar infra merah adalah radiasi elektromagnetik dari panjang gelombang lebih panjang dari cahaya tampak, tetapi lebih pendek dari radiasi gelombang radio. Sinar infra merah merupakan cahaya yang tidak tampak. Radiasi infra merah memiliki panjang gelombang antara 700 nm sampai 1 mm dan berada pada spektrum berwarna merah. Jika dilihat dengan spektroskop cahaya maka radiasi cahaya infra merah akan nampak pada spektrum elektromagnet dengan panjang gelombang diatas panjang gelombang cahaya merah. Dengan panjang gelombang ini maka cahaya infra merah tidak akan tampak oleh mata namun radisi panas yang ditimbulkannya masih terasa/ dideteksi.
Pada dasarnya komponen yang menghasilkan panas juga menghasilkan radiasi infra merah termasuk tubuh manusia maupun tubuh binatang. Cahaya infra merah mempunyai panjang gelombang yang sangat panjang tetapi tidak dapat menembus bahan - bahan yang tidak dapat melewatkan cahaya yang nampak sehingga cahaya infra merah tetap mempunyai karakteristik seperti halnya cahaya yang nampak oleh mata.
Gambar 2.2 Simbol Infra Merah
Sifat-sifat cahaya infra merah : 1. Tidak tampak manusia
2. Tidak dapat menembus materi yang tidak tembus pandang 3. Dapat ditimbulkan oleh komponen yang menghasilkan panas
Komunikasi Infra merah dilakukan dengan menggunakan dioda infra merah sebagai pemancar dan modul penerima infra merah sebagai penerimanya. Untuk jarak yang cukup jauh, kurang lebih tiga sampai lima meter, pancaran data infra merah harus dimodulasikan terlebih dahulu untuk menghindari kerusakan data akibat noise.
Sinar infra merah yang dipancarkan oleh pemancar infra merah tentunya mempunyai aturan tertentu agar data yang dipancarkan dapat diterima dengan baik pada penerima. Oleh karena itu baik di pengirim infra merah maupun penerima infra merah harus mempunyai aturan yang sama dalam mentransmisikan (bagian pengirim) dan menerima sinyal tersebut kemudian mendekodekannya kembali menjadi data biner (bagian penerima). Komponen yang dapat menerima infra merah ini merupakan komponen yang peka cahaya, dapat berupa dioda (photodioda) atau transistor (phototransistor). Komponen ini akan merubah energi cahaya, dalam hal ini energi cahaya infra merah, menjadi pulsa - pulsa sinyal listrik. Komponen ini harus mampu mengumpulkan sinyal infra merah sebanyak mungkin sehingga pulsa - pulsa sinyal listrik yang dihasilkan kualitasnya cukup baik.
pancarannya diterima oleh penerima (fotodioda) sehingga bersifat menghantar akibatnya tegangan akan jatuh sampai sama dengan tegangan ground (0). Dan sebaliknya apabila tidak mendapat pancaran sinar infra merah maka akan menghasilkan tegangan.
2.2 Fotodioda
Fotodioda berbeda dengan dioda biasa. Fotodioda adalah suatu jenis dioda yang resistansinya berubah - ubah jika cahaya yang jatuh pada dioda berubah - ubah intensitasnya. Fotodioda digunakan sebagai saklar elektronik yang bereaksi akibat perubahan intensitas cahaya. Dalam keadaan gelap nilai tahananya sangat besar hingga praktis tidak ada arus yang mengalir. Semakin besar cahaya yang jatuh pada dioda maka semakin kecil nilai tahanannya, sehingga arus yang mengalir semakin besar. Begitu juga kebalikannya, jika cahaya yang jatuh pada dioda kecil maka tahanannya akan besar, sehingga arus yang mengalir kecil.
Gambar 2.3 Fotodioda
Gambar 2.4 Simbol Fotodioda
Prinsip kerja dari fotodioda jika sebuah sambungan p-n dibias maju dan diberikan cahaya padanya maka pertambahan arus sangat kecil sedangkan jika sambungan p-n dibias mundur arus akan bertambah cukup besar. Cahaya yang dikenakan pada fotodioda akan mengakibatkan terjadinya pergeseran foton yang akan menghasilkan pasangan elektron-hole dikedua sisi dari sambungan. Ketika elektron - elektron yang dihasilkan itu masuk ke pita konduksi maka electron - elektron itu akan mengalir ke arah positif sumber tegangan sedangkan hole yang dihasilkan mengalir ke arah negatif sumber tegangan sehingga arus akan mengalir di dalam rangkaian. Besarnya pasangan elektron ataupun hole yang dihasilkan tergantung dari besarnya intensitas cahaya yang dikenakan pada fotodioda.
2.3. RFID (Radio Frequency Identification)
2.3.1 Pengertian RFID
2.3.2 Jenis RFID
Penggolongan RFID berdasarkan catu daya terdiri dari: 1. RFID aktif
RFID aktif menggunakan sumber daya internal, seperti baterai sehingga akan mengurangi daya yang diperlukan oleh pembaca RFID dan tag dapat mengirimkan informasi dalam jarak yang lebih jauh. Kelemahan dari tipe tag ini adalah harganya yang mahal dan ukurannya yang lebih besar karena lebih komplek. Semakin banyak fungsi yang dapat dilakukan oleh tag RFID maka rangkaiannya akan semakin komplek dan ukurannya akan semakin besar. 2. RFID pasif
RFID pasif adalah RFID tag yang catu dayanya diperoleh dari medan yang dihasilkan oleh pembaca RFID. Rangkaiannya lebih sederhana, harganya jauh lebih murah, ukurannya kecil, dan lebih ringan. Kelemahannya adalah tag hanya dapat mengirimkan informasi dalam jarak yang dekat dan pembaca RFID harus menyediakan daya tambahan untuk tag RFID.
3. RFID semi - pasif
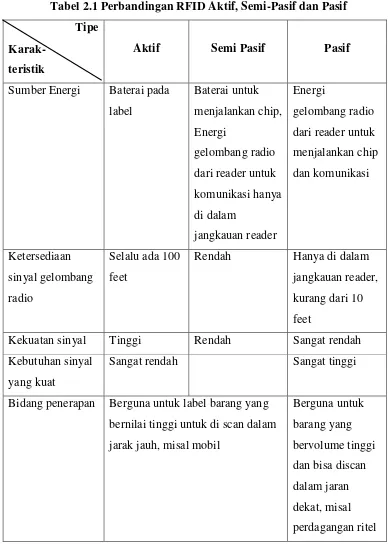
Tabel 2.1 Perbandingan RFID Aktif, Semi-Pasif dan Pasif
Tipe
Aktif Semi Pasif Pasif
Karak-
teristik
Sumber Energi Baterai pada label
Rendah Hanya di dalam
jangkauan reader, kurang dari 10 feet
Kekuatan sinyal Tinggi Rendah Sangat rendah
Kebutuhan sinyal yang kuat
Sangat rendah Sangat tinggi
Bidang penerapan Berguna untuk label barang yang bernilai tinggi untuk di scan dalam jarak jauh, misal mobil
1. Tag RFID
Tag RFID adalah perangkat yang dibuat dari rangkaian elektronika dan antena yang terintegrasi di dalam rangkaian tersebut. Rangkaian elektronik dari tag RFID umumnya memiliki memori sehingga tag ini mempunyai kemampuan untuk menyimpan data. Memori pada tag secara dibagi menjadi sel-sel. Beberapa sel menyimpan data Read Only, misalnya serial number yang unik yang disimpan pada saat tag tersebut diproduksi. Sel lain pada RFID mungkin juga dapat ditulis dan dibaca secara berulang.
2. Antena
Antena digunakan untuk mentransmisikan sinyal frekuensi radio antara pembaca RFID dengan tag RFID.
3. Pembaca RFID / Reader
Pembaca RFID adalah perangkat yang kompatibel dengan tag RFID yang akan berkomunikasi secara wireless dengan tag. Sebuah pembaca RFID harus menyelesaikan dua buah tugas, yaitu:
• Menerima perintah dari software aplikasi • Berkomunikasi dengan tag RFID
Pembaca RFID merupakan penghubung antara software aplikasi dengan antena yang akan meradiasikan gelombang radio ke tag RFID. Gelombang radio yang diemisikan oleh antena berpropagasi pada ruangan di sekitarnya. Akibatnya data dapat berpindah secara wireless ke tag RFID yang berada berdekatan dengan antena. Pembaca bisa ditempelkan dalam posisi stasioner (misalnya, di samping ban berjalan di pintu pabrik atau dermaga di gudang), portabel (diintegrasikan ke dalam komputer mobile yang juga dapat digunakan untuk memindai kode bar), atau bahkan tertanam dalam elektronik peralatan seperti print-on-demand printer label.
4. Software Aplikasi
2.3.4 Frekuensi Kerja RFID
Ada beberapa band frekuensi yang digunakan untuk sistem RFID. Pemilihan dari frekuensi kerja sistem RFID akan mempengaruhi jarak komunikasi, interferensi dengan frekuensi sistem radio lain, kecepatan komunikasi data, dan ukuran antena.
Tag RFID dan pembaca harus disetel ke frekuensi yang sama untuk berkomunikasi. Sistem RFID menggunakan frekuensi yang berbeda, tetapi yang paling umum adalah frekuensi rendah (30 kHz – 500 kHz), frekuensi tinggi (13,56 MHz) dan ultra-tinggi-frekuensi atau UHF (860-960 MHz). Microwave (2,45 GHz) juga digunakan dalam beberapa aplikasi.
Gambar 2.5 Frekuensi yang dapat digunakan RFID
Pada frekuensi rendah, tag pasif tidak dapat mentransmisikan data dengan jarak yang jauh, karena keterbatasan daya yang diperoleh dari medan elektromagnetik. Akan tetapi komunikasi tetap dapat dilakukan tanpa kontak langsung. Pada kasus ini hal yang perlu mendapatkan perhatian adalah tag pasif harus terletak jauh dari objek logam, karena logam secara signifikan mengurangi fluks dari medan magnet. Akibatnya tag RFID tidak bekerja dengan baik, karena tag tidak menerima daya minimum untuk dapat bekerja.
pada frekuensi tinggi juga mendapatkan pelemahan (atenuasi) ketika tag tertutupi oleh es atau air. Pada kondisi terburuk, tag yang tertutup oleh logam tidak terdeteksi oleh pembaca RFID.
Ukuran antena yang harus digunakan untuk transmisi data bergantung dari panjang gelombang elektromagnetik. Untuk frekuensi yang rendah, maka antena harus dibuat dengan ukuran yang lebih besar dibandingkan dengan RFID dengan frekuensi tinggi.
2.3.5 Cara Kerja RFID
RFID menggunakan RF (Gelombang radio/gelombang elektromagnetik) sinyal untuk memindahkan informasi dari RFID tag ke reader, sehingga dapat beroperasi diberbagai macam kondisi lingkungan yang berbeda, dan memberikan tingkat integritas data yang tinggi.
Gambar 2.6 Skema Kerja Perangkat RFID
menggunakan gelombang elektromagnetik kemudian diterima oleh antena pada label RFID. Pengiriman data dari label RFID berupa nomor serial yang tersimpan dalam label, dengan mengirim kembali gelombang radio ke reader. Informasi dikirim dan dibaca dari label RFID oleh reader menggunakan gelombang radio.
2.3.6 Format Data RFID
Pembacaan format data yang dikeluarkan oleh RFID reader adalah dengan format output ASCII atau Wiegand 26-bit. Output data dengan format ASCII adalah yang paling banyak digunakan karena outputnya sangat mudah untuk dihubungkan pada mikrokontroller atau PC dengan menggunakan komunikasi serial UART.
2.3.6.1Format Data ASCII
Output yang memiliki format ASCII memiliki struktur sebagai berikut:
Tabel 2.2 Data ASCII
Pin1 Ground Zero volts and Tuning Capacitor Ground
Pin2 Reset Bar Strap to +5V
Pin3 Antenna NC
Pin4 Antenna NC
Pin5 Strap to Ground
Pin6 CMOS Serial ASCII
Pin7 TTL Data Serial ASCII inverted
Pin8 BEEP/LED 2,7 KHz Logic
Format data ASCII memiliki total panjang data 16 bytes dengan tambahan masing – masing 1 byte sebagai start bit dan stop bit. Nilai checksum merupakan hasil dari
exclusive OR dari 10 bytes data ASCII. CR dan LF merupakan kode kontrol yang akan menggeser cursor ke sebelah kiri tampilan, tetapi tidak akan menyebabkan perpindahan baris. Line Feed (LF) merupakan kode kontrol yang akan menyebabkan
cursor berada pada baris selanjutnya.
2.3.7 Tingkat Akurasi Sistem RFID
Tingkat akurasi RFID di definisikan sebagai tingkat keberhasilan RFID reader melakukan identifikasi sebuah tag yang berada pada area kerjanya. Keberhasilan dari proses identifikasi sangat dipengaruhi oleh beberapa batasan fisik, yaitu:
1. Posisi antena pada RFID reader
2. Karakteristik dari material lingkungan yang mencakup sistem RFID 3. Batasan catu daya
4. Frekuensi kerja sistem RFID
2.4. Mikrokontroler ATMega8535
Mikrokontroler adalah otak dari suatu sistem elektronika. Sebagai teknologi baru, yaitu teknologi semi konduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang kecil serta dapat diproduksi secara massal (dalam jumlah banyak) sehingga harga menjadi lebih murah (dibandingkan mikroprosessor). Sebagai kebutuhan pasar, mikrokontroler hadir untuk memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat bantu dan mainan yang lebih canggih serta dalam bidang pendidikan.
perbandingan RAM dan ROM-nya besar, artinya program-program pengguna disimpan dalam ruang RAM yang relatif besar, sedangkan rutin-rutin antar muka perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan pada mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program kontrol disimpan dalam ROM yang ukurannya relatif lebih besar, sedangkan RAM digunakan sebagai tempat penyimpanan sederhana sementara termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan.
Mikrokontroler saat ini sudah dikenal dan digunakan secara luas pada dunia industri. Banyak sekali penelitian atau proyek mahasiswa yang menggunakan berbagai versi mikrokontroler yang dapat dibeli dengan harga yang relatif murah. Hal ini dikarenakan produksi masal yang dilakukan oleh para produsen chip seperti Atmel, Maxim, dan Microchip. Mikrokontroler saat ini merupakan chip utama pada hampir setiap peralatan elektronika canggih. Alat-alat canggih sekarang ini sangat bergantung pada kemampuan mikrokontroler tersebut.
Gambar 2.7 Bentuk Fisik Mikrokontroler Atmega8535
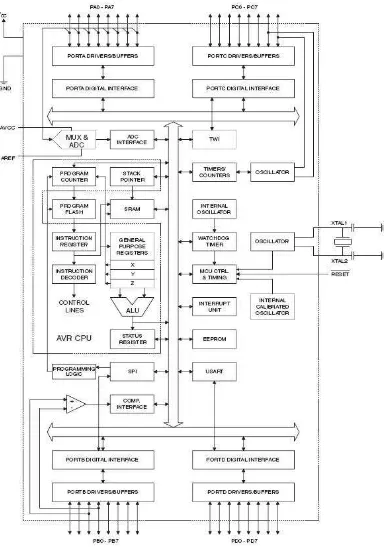
2.4.1 Arsitektur Mikrokontroler ATMega 8535
keluarga AT90Sxx, keluarga ATmega, dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama.
Arsitektur ATMega8535 secara umum adalah sebagai berikut :
a. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D b. ADC (Analog to Digital Converter) 10 bit sebanyak 8 saluran
c. 3 buah timer/counter dengan kemampuan perbandingan d. SRAM sebesar 512 byte
e. Port antar muka SP18535 “memory map” f. Watchdog timer dengan silator internal
g. 512 byte EEPROM yang dapat di program saat operasi h. 8 kb Flash memory dengan kemampuan Read While Write
i. Unit interupsi internal dan eksternal j. 4 channel PWM
k. 6 sleep modes : ADC Noise Reduction, Power-save, Power-down, Idle, standby
dan extended standby
l. Analog comparator
Port USART untuk komunikasi serial dengan kecepatan maksimal 2,5 Mbps
AVR ATMega8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Memori data terbagi menjadi 3 bagian, yaitu 32 buah register umum, 64 buah register I/O, dan 512 byte SRAM Internal.
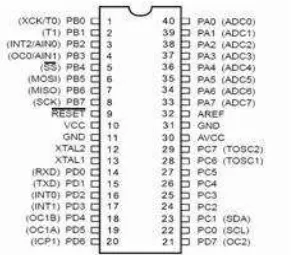
2.4.2 Konfigurasi Pin ATMega8535
Konfigurasi pin ATMega8535 bisa dilihat pada gambar 2.10 dibawah ini.
Gambar 2.9 Pin ATMega8535
Keterangan:
a. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya b. GND merupakan pin Ground
c. Port A (PA0 – PA7) merupakan pin I/O dan pin masukan ADC
d. Port B (PB0 – PB7) merupakan pin I/O yang mempunyai fungsi khusus yaitu Timer/Counter, komparator analog dan SPI
e. Port C (PC0 – PC7) merupakan port I/O dan pin yang mempunyai fungsi khusus, yaitu komparator analog dan timer oscillator
f. Port D (PD0 – PD1) merupakan port I/O dan pin fungsi khusus yaitu komparator analog dan interrupt eksternal serta komunikasi serial
g. RESET merupakan pin yang digunakan untuk mereset mikrokontroler h. XTAL1 dan XTAL merupakan pin masukan clock eksternal
i. AVCC merupakan pin masukan untuk tegangan ADC
Data yang dipakai dalam mikrokontroler ATMega8535 dipresentasikan dalam sistem bilangan biner, desimal dan bilangan heksadesimal. Data yang terdapat di mikrokontroler dapat diolah dengan berbagai operasi aritmatik (penjumlahan, pengurangan, dan perkalian) maupun operasi nalar (AND, OR, dan EOR /eksklusif OR). AVR ATmega8535 memiliki tiga buah timer, yaitu:
1. Timer/counter 0 (8 bit) 2. Timer/counter 1 (16 bit) 3. Timer/counter 2 (8 bit)
Karena ATMega8535 memiliki 8 saluran ADC maka untuk keperluan konversi sinyal analog menjadi data digital yang berasal dari sensor dapat langsung dilakukan prosesor utama. Beberapa karakteristik ADC internal ATMega8535 adalah:
1. Mudah dalam pengoperasian 2. Resolusi 10 bit
3. Memiliki 8 masukan analog 4. Konversi pada saat CPU sleep 5. Interrupt waktu konversi selesai
2.5 MAX 232
Gambar 2.10 Max-232
.
RS-232 adalah standar komunikasi serial yang didefenisikan sebagai antar muka antara perangkat terminal data dan perangkat kumunikasi data menggunakan pertukaran data biner secara serial.
Standar RS-232 mendefenisikan kecepatan 256 kbps atau lebih rendah dengan jarak kurang dari 15 meter. Dengan susunan pin khusus yang disebut null modem cable, standar RS-232 dapat juga digunakan untuk komunikasi data antara dua komputer secara langsung.
2.6 Motor Stepper
Motor Stepper adalah motor DC yang gerakannya bertahap (step per step) sesuai dengan pulsa yang diberikan padanya dan memiliki akurasi yang tinggi tergantung pada spesifikasinya.
Pada umumnya motor stepper hanya mempunyai kumparan pada statornya sedangkan pada bagian rotornya merupakan magnet permanen. Dengan model motor seperti ini maka motor stepper dapat diatur posisinya pada posisi tertentu dan/atau berputar ke arah yang diinginkan, searah jarum jam atau sebaliknya.
2.6.1 Jenis Motor Stepper
Berdasarkan metode perancangan rangkain pengendalinya, secara umum terdapat dua jenis motor stepper yaitu bipolar dan unipolar.
1. Motor Stepper Unipolar
Motor stepper unipolar terdiri dari dua lilitan yang memiliki center tap. Center tap dari masing - masing lilitan ada yang berupa kabel terpisah ada juga yang sudah terhubung didalamnya sehingga center tap yang keluar hanya satu kabel. Untuk motor stepper yang center tapnya ada pada masing – masing lilitan kabel inputnya ada 6 kabel. Namun jika center tapnya sudah terhubung di dalam kabel inputannya hanya 5 kabel. Center tap dari motor stepper dapat dihubungkan ke pentanahan atau ada juga yang menghubungkannya ke +VCC hal ini sangat dipengaruhi oleh driver yang digunakan. Sebagai gambaran dapat dilihat konstruksi motor stepper unipolar pada gambar berikut.
Gambar 2.11 Konstruksi Motor Stepper Unipolar
Ketelitian dari magnet permanen di rotor dapat sampai 1,8° untuk tiap stepnya. Ketika arus mengalir melalui tap tengah pada lilitan pertama akan menyebabkan kutub pada stator bagian atas menjadi kutub utara sedangkan kutub stator pada bagian bawah menjadi kutub selatan. Kondisi akan menyebabkan rotor mendapat gaya tarik menuju kutub - kutub ini. Dan ketika arus yang melalui lilitan 1 dihentikan dan lilitan 2 diberi arus maka rotor akan mengerak lagi menuju kutub - kutub ini. Sampai di sini rotor sudah berputar sampai 30° atau 1 step.
2. Motor stepper bipolar
Motor stepper bipolar memiliki dua lilitan. Perbedaan dari tipe unipolar adalah bahwa pada tipe bipolar lilitannya tidak memiliki center tap. Keunggulan tipe bipolar yaitu memiliki torsi yang lebih besar jika dibandingkan dengan tipe unipolar untuk ukuran yang sama.
Gambar 2.12 Konstruksi Motor Stepper Bipolar
Pada motor stepper tipe ini hanya memiliki empat kabel masukan. Namun untuk menggerakan motor stepper tipe ini lebih rumit jika dibandingkan dengan menggerakan motor stepper tipe unipolar.
2.7 ULN2803
bertindak sebagai relay, menyalakan atau mematikan tingkat sinyal yang lebih tinggi di sisi yang berlawanan. Bentuk fisiknya dapat dilihat seperti gambar berikut.
Gambar 2.13 ULN2803
Motor stepper merupakan motor yang bergerak dengan cara step per step atau langkah perlangkah. Pengontrolan motor ini berdasarkan pulsa - pulsa data yang diberikan dengan urutan yang tepat, namun selain itu pulsa yang diberikan harus mempunyai arus yang cukup besar untuk fase lilitan agar motor bisa bergerak.
Untuk itu biasa digunakan IC ULN2803 sebagai driver motor stepper karena sifatnya seperti transistor darlington sehingga dapat menahan arus lebih besar dibandingkan jika motor langsung dicatu dari port mikrokontroler bisa menyebabkan kerusakan akibat kelebihan arus.
Secara fisik ULN2803 adalah konfigurasi IC 18-pin dan berisi delapan transistor NPN. Pins 1-8 menerima sinyal tingkat rendah, pin 9 sebagai grounding (untuk referensi tingkat sinyal rendah). Pin 10 adalah COM pada sisi yang lebih tinggi dan umumnya akan dihubungkan ke tegangan positif. Pins 11-18 adalah output (Pin 1 untuk Pin 18, Pin 2 untuk 17, dst).
Sebuah sinyal TTL beroperasi dalam selang 0-5V, dengan segala sesuatu antara 0,0 dan 0.8V dianggap "rendah" (off), dan 2,2 sampai 5.0V dianggap "tinggi" (on). Daya maksimum yang tersedia pada sinyal TTL tergantung pada jenisnya, tetapi umumnya tidak melebihi 25mW (~ 5mA @ 5V), sehingga tidak cukup untuk sesuatu seperti kumparan relay. Di sisi output ULN2803 umumnya berada pada selang nilai 50V/500mA, sehingga dapat mengoperasikan beban kecil secara langsung. Pada aplikasi lain, sering digunakan untuk daya kumparan dari satu atau lebih relay, yang memungkinkan tegangan yang lebih tinggi atau arus yang lebih kuat, dikontrol oleh sinyal tingkat rendah. Dalam aplikasi arus kuat (listrik), ULN2803 menggunakan tingkat rendah (TTL) sinyal untuk mengaktifkan ataupun mematikan sinyal tegangan/arus yang lebih tinggi pada sisi output.
2.8 IC LM324
IC LM324 merupakan IC Operational Amplifier, IC ini mempunyai 4 buah op-amp yang berfungsi sebagai komparator. IC ini mempunyai tegangan kerja antara +5 V sampai +15V untuk +Vcc dan -5V sampai -15V untuk -Vcc. Bentuk fisik IC LM324 dapat dilihat seperti gambar di bawah ini.
Gambar 2.15 Bentuk Fisik LM324
Gambar 2.16 Konfigurasi Pin LM324
Keterangan: n
a. Pin 1,7,8,14 (Output) : Merupakan sinyal output
b. Pin 2,6,9,13 (Inverting Input) : Semua sinyal input yang berada di pin ini akan mempunyai output yang berkebalikan dari input.
c. Pin 3,5,10,12 (Non-inverting input): Semua sinyal input yang berada di pin ini akan mempunyai output yang sama dengan input
(tidak berkebalikan).
d. Pin 4 (+Vcc) : Pin ini dapat beroperasi pada tegangan antara +5 Volt sampai +15 Volt.
BAB 3
Gambar 3. 1Diagram Blok Sistem
Dari diagram blok di atas menggambarkan bahwa sistem yang penulis rancang akan melakukan identifikasi kendaraan melalui pembacaan tag rfid dan menghitung jumlah mobil yang diparkir. Sistem ini terdiri dari modul rfid untuk membaca kartu yang ditag oleh pengguna sebagai syarat masuk area parkir serta led infra merah dan fotodioda untuk mendeteksi kendaraan yang parkir.
3.2 Rangkaian Power Supply
Gambar 3.2 Rangkaian Power Supply
3.3 Rangkaian Mikrokontroler ATMega8535
ATmega8535 adalah mikrokontroler CMOS 8-bit daya-rendah berbasis arsitektur RISC yang ditingkatkan. Kebanyakan instruksi dikerjakan pada satu siklus clock. ATmega8535 mempunyai throughput mendekati 1 MIPS per MHz membuat disainer sistem untuk mengoptimasi konsumsi daya versus kecepatan proses.
Gambar 3.3 Rangkaian Skematik Minimum Mikrokontroler ATMega8535
Rangkaian skematik dan layout PCB sistem minimum Mikrokontroler ATMega 8535 dapat dilihat pada gambar di atas. Pin 12 dan 13 dihubungkan ke XTAL 12 MHz dan dua buah kapasitor 30 pF. XTAL ini akan mempengaruhi kecepatan mikrokontroler ATMega8535 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroler ini.
Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroler terletak pada kaki 6, 7, 8, 9, 10 dan 11. Apabila terjadi keterbalikan pemasangan jalur ke ISP Programmer, maka pemograman mikrokontroler tidak dapat dilakukan karena mikrokontroler tidak akan bisa merespon.
3.4 Rangkaian Infra Merah dan Fotodioda
Gambar 3.4 Rangkaian Infra Merah dan Fotodioda
3.5 Rangkaian Motor Stepper
Motor stepper yang digunakan pada alat ini adalah motor stepper unipolar yang memiliki 4 kumparan, setiap step-nya dapat berputar sebesar 1,8 derajad. Motor stepper ini dihubungkan langsung dengan tali untuk menaik-turunkan palang, jadi setiap perputaran motor stepper berpengaruh pada naik turunnya palang.
Gambar 3.5 Motor Stepper Unipolar
Pergerakan motor stepper dikendalikan oleh mikrokontroler. Logika - logika yang diberikan oleh mikrokontroler memiliki tegangan sebesar 5 volt dan arus yang cukup kecil, sedangkan motor stepper yang digunakan untuk alat ini memerlukan arus 500 mA dan tegangan 12 volt. Karena itu diperlukan suatu rangkaian penyangga antara motor stepper dan mikronkontroler yang dalam hal ini boleh penulis katakan sebagai driver motor stepper.
Output dari driver motor stepper adalah 12 volt. Fungsinya sebagai perantara antara mikrokontroler dan motor stepper. Dengan kata lain, mikrokontroler hanya memberikan logika - logika untuk menggerakkan motor sepper, sedangkan arus dan tegangan yang digunakan untuk menggerakkan motor stepper diambil dari rangkaian penyangga ini.
3.6 Rangkaian RFID Reader Modul
Gambar 3.7 Rangkaian Reader RFID
Pembuatan reader RFID memanfaatkan IC ID-12. Rangkaian RFID dapat dilihat seperti gambar di atas dan komponen module ini terdiri dari:
- Tag RFID berupa kartu, berfungsi sebagai transponder untuk merespon dan mentransmisikan gelombang radio 125 Khz - 134 Khz, lengkap dengan antena dan memori ROM yang diprogram untuk satu ID.
- RFID Reader (ID -12 Innovations) berupa module Transceiver (pasangan dari Tag) yang berfungsi mengaktifkan dan membaca signal berisi kode unik berbeda - beda dari setiap Tag untuk dikirim dan diproses oleh rangkaian pengendali.
RFID. Pin ini akan digunakan sebagai jalur pengiriman data yang terbaca dari tag. Cara komunikasi rangkaian RFID dengan mikrokontroler adalah secara serial, artinya pengiriman bit demi bit data dilakukan secara bergantian mengikuti siklus clock tertentu.
3.7 Rangkaian RS 232
Komunikasi serial merupakan hal yang penting dalam sistem embedded, karena dengan komunikasi serial kita dapat dengan mudah menghubungkan mikrokontroler dengan devais lainnya.
Port serial pada mikrokontroller terdiri atas dua pin yaitu RXD dan TXD, RXD berfungsi untuk menerima data dari komputer/perangkat lainnya, TXD berfungsi untuk mengirim data ke komputer/perangkat lainnya.
Gambar 3.8 Max232 dalam Rangkaian
3.8 Flowchart Program
Penjelasan Flowchart sebagai berikut :
BAB 4
DATA DAN ANALISA DATA
4.1 Pengujian Power Supply
Pengujian rangkaian power supply ini bertujuan untuk mengetahui tegangan yang dikeluarkan oleh rangkaian dengan mengukur tegangan keluaran dari power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 Volt. Dengan begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak. Jika diukur, hasil dari keluaran tegangan tidak murni sebesar +9 Volt dan +12 Volt, tetapi +8,97 Volt dan +12,03 Volt. Hasil tersebut dikarenakan beberapa faktor, diantaranya kualitas dari tiap - tiap komponen yang digunakan nilainya tidak murni. Selain itu, tegangan jala - jala listrik yang digunakan tidak stabil.
4.2 Pengujian Rangkaian Mikrokontroler ATMega8535
Karena pemrograman menggunakan mode ISP (In System Programming) mikrokontroler harus dapat diprogram langsung pada papan rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program downloader. Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program downloader yaitu ATMega8535.
Gambar 4.1 Informasi Signature Mikrokontroller
4.3 Pengujian Rangkaian Infra Merah dan Fotodioda
Gambar 4.2 Infra Merah dan Fotodioda
Pengukuran dilakukan dengan menggunakan multimeter digital untuk mengetahui tegangan keluaran dari fotodioda. Hasil pengukurannya dapat dilihat pada tabel berikut.
Tabel 4.1 Hasil Pengukuran Vout Fotodioda
Keterangan Vout (V)
Terkena inframerah 2,3 Tidak terkena inframerah 4,7
Dari tabel diatas kita dapat melihat bahwa apabila fotodioda menerima infra merah maka tegangan keluarannya akan lebih kecil bila dibandingkan dengan fotodioda yang tidak menerima infra merah.
Analisanya sebagai berikut: Jika ada sinar infra merah yang mengenai fotodioda, maka hambatan pada fotodioda akan kecil, sehingga tegangan V- akan kecil. Misalnya tahanan fotodioda mengecil menjadi 10 kOhm. Maka dengan teorema pembagi tegangan:
V- = Rrx/(Rrx + R2) x Vcc V- = 10 / (10+10) x 5 Volt V- = (10/20) x 5 Volt V- = 2,5 Volt
Sedangkan jika tahanan fotodioda besar maka tegangan V- akan besar (mendekati nilai Vcc). Misal tahanan fotodioda menjadi 150 kOhm. Maka dengan teorema pembagi
dengan mengubah nilai resistansi yang ada di dalamnya. Dalam rangkaian ini maka nilai trimpot akan berkisar antara 5 Volt sampai 0 Volt. Nilai tegangan trimpot ini akan mempengaruhi nilai V+yang diterima komparator sebagai nilai referensi komparator.
Komparator dalam rangkaian ini berfungsi untuk menghasilkan tegangan sebesar 0 Volt atau 5 Volt pada output komparator. Jika V+ lebih dari V- maka output komparator = 5 Volt. Jika V+ kurang dari V- maka output komparator = 0 Volt.
Misal kita mengatur besar V+ dengan cara memutar putaran pada trimpot hingga dihasilkan tegangan sebesar 3,5 Volt. Pada saat intensitas infra merah besar yang mengakibatkan tahanan fotodioda mengecil menjadi 10 kOhm dan mengakibatkan V- = 2,5 Volt maka output komparator menjadi 5 Volt. Pada saat intensitas infra merah kecil yang mengakibatkan tahanan fotodioda membesar menjadi 150 kOhm dan mengakibatkan V- = 4,7 Volt maka output komparator menjadi 0 Volt.
Penghubungan Output komparator dengan Vcc bertujuan sebagai rangkaian PullUp. Hal ini dikarenakan arus yang keluar dari komparator begitu kecil sehingga walaupun memiliki nilai tegangan sebesar 5 Volt tidak dapat diterima beban (dalam rangkaian diatas beban adalah LED). Dengan penambahan Vcc, ketika tegangan output dari komparator bernilai 0 Volt maka arus dari Vcc lebih banyak memilih mengalir menuju output komparator yang bernilai 0 Volt dan tanpa beban.ketika tegangan output dari komparator bernilai 5 Volt maka arus dari Vcc akan banyak mengalir menuju LED kemudian ke ground yang mengakibatkan LED menyala. LED akan menyala jika sensor menerima sinar infra merah, dan akan mati jika sensor tidak menerima sinar infra merah.
4.4 Pengujian Motor Stepper
Motor stepper yang digunakan dalam penelitian ini adalah motor stepper unipolar dengan 4 jalur data dan satu jalur common. Motor stepper ini bekerja dengan baik pada arus 500 mA dan tegangan 12 V. ULN2803 digunakan sebagai perantara antara mikrokontroler dengan motor stepper. Motor stepper dapat digerakkan dengan cara memberikan pulsa – pulsa. Pulsa ini dapat mengerakkan motor stepper sebanyak 1 siklus (4 step).
Tabel 4.2 Data Pulsa Penggerak Motor Stepper Membuka Palang
D1 D2 D3 D4
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
Pergerakan motor stepper dilakukan dari kiri ke kanan sesuai dengan data pada tabel di atas. Ketika motor stepper diberi logika 1 (high) maka pergerakannya akan mengikuti pulsa yang di berikan sehingga motor akan menggerakkan palang kekanan searah jarum jam (palang terbuka). Logika 0 dan 1 artinya memberikan pulsa atau memberikan tegangan senilai 0 volt untuk 0 (low) dan 5 volt untuk 1 (high). Untuk menutup palang, kita berikan pulsa yang arahnya berlawanan dengan arah jarum jam. Sehingga pergerakan motor stepper dilakukan dari kanan ke kiri.
Tabel 4.3 Data Pulsa Penggerak Motor Stepper Menutup Palang
D1 D2 D3 D4
0 0 0 1
0 0 1 0
0 1 0 0
Dengan mengikuti keterangan diatas kita depat membuat program dari mikrokontroler untuk menggerakkan motor stepper:
#include <mega8535.h> jam. Dimana motor stepper dihubungkan melalui portA, dan program portA diisikan dengan nilai yang secara bertahap nilainya akan bergeser kearah kiri. Perintah “for (i=0;i<50;i++)” digunakan untuk membatasi jumlah step pergeseran motor stepper. Dalam hal ini dibatasi sebanyak 50 kali. Artinya pada program ini motor stepper diputar sebanyak 50 step. Dalam satu step motor stepper ini dapat berputar sebesar 1,8 derajat. Dengan demikian pada program motor stepper berputar sebesar 50 x 1,8 = 90 derajat.
dipakai adalah 0,13 detik, maka lamanya waktu yang dibutuhkan untuk memutar motor stepper sebesar 90 derajat adalah 50 x 0,13 detik = 6,5 detik.
MOTOR STEPPER
Gambar 4.3 Rangkaian Pengujian Motor Stepper
Setiap pin inputan dati motor stepper akan dihubungkan dengan pin keluaran dari driver motor stepper dimana pulsa keluaran dari driver yang akan diberikan pada motor stepper di atur oleh mikrokontroler atmega8535 yaitu pada PA0, PA1, PA2 dan PA3, dengan demikian keluaran dari mikrokontroler dihubungkan dengan pin input dari drivermotor stepper yaitu IC ULN2803 seperti pada gambar diatas. IC ULN2803 mampu beroperasi pada tegangan +5V dan output yang keluar dari IC ULN2803 ini akan bertentangan dengan input yang diberikan.
Pada penelitian ini digunakan 1 motor stepper untuk membuka dan menutup palang. Motor stepper akan bergerak menutup dan membuka palang sesuai dengan instruksi dari mikrokontroller.
4.5 Pengujian RFID Reader Modul
Software. Fungsi Hyperterminal ini adalah untuk melihat ID kartu yang dimiliki oleh masing - masing kartu (tag) RFID. Tag yang diuji hanya 2 buah. Tag yang berhasil dibaca oleh RFID Reader dan terbaca di komputer, terlihat di Tabel berikut.
Tabel 4.4 Hasil Pengujian RFID
NO Kartu RFID Terbaca
1 4D00D5E393E8 2 480085F53F07
Sedangkan 1 kartu lagi digunakan untuk melihat bahwa sistem keamanan parkir ini ditandai dengan terbuka atau tidaknya palang ketika kartu ketiga didekatkan ke reader. Kemudian untuk mengetahui jarak maksimal pembacaan tag rfid dengan readernya dilakukan pengujian dengan cara mendekatkan tag dengan reader untuk jarak – jarak tertentu, datanya dapat dilihat pada berikut.
Tabel 4.5 Hasil Pengujian Pembacaan Tag RFID
Jarak Tag terhadap
Reader (cm)
Tag 1 Tag 2 Tag 3
1 Terbaca Terbaca Tidak terbaca
2 Terbaca Terbaca Tidak terbaca
3 Terbaca Terbaca Tidak terbaca
4 Terbaca Terbaca Tidak terbaca
5 Terbaca Terbaca Tidak terbaca
6 Tidak terbaca Tidak terbaca Tidak terbaca 7 Tidak terbaca Tidak terbaca Tidak terbaca 8 Tidak terbaca Tidak terbaca Tidak terbaca
pengujian hasilnya adalah reader tidak membaca atau merespon tag ketiga ini ditandai dengan buzzer tidak berbunyi dan palang juga tidak terbuka.
Pengujian juga dilakukan terhadap posisi tag terhadap reader rfid. Tag rfid dapat di baca dengan baik dalam posisi tegak lurus terhadap reader rfid dan tidak ada penghalang antara tag dengan reader rfid. Apabila jarak tag terhadap reader kurang dari 5 cm dan posisi tag tidak tegak lurus terhadap readernya maka reader rfid tidak akan merespon tag tersebut.
4.6 Pengujian Modul RS232 Konverter
Pengukuran dan pengujian ini dimaksudkan untuk menguji apakah konverter tersebut bisa digunakan untuk komunikasi antara alat dengan komputer. Pengukuran tegangan ini dilakukan dengan menggunakan multimeter digital. Berikut ini tabel hasil pengukurannya.
Tabel 4.6 Hasil Pengukuran RS232 Konverter
Keterangan Tegangan (Volt) Logika Pin 14 (Tx RS232) -7,2 High (RS232) Pin 13 (Rx RS232) +5,3 Low (RS232)
Pin 10 (Tx TTL) 4,7 High (TTL)
Pin 12 (Rx TTL) 0,3 Low (TTL)
Gambar 4.4 Tampilan Hyperterminal Pengiriman Data Serial
Tampilan yang dihasilkan dari pengujian hyperterminal terlihat pada gambar diatas. Dari data yang dikirimkan tersebut, semuanya berhasil diterima dengan baik sesuai dengan yang dikirimkan tanpa terjadi error data maupun kehilangan data. Sehingga dapat diambil kesimpulan bahwa rangkaian komunikasi RS232 dapat digunakan karena proses komunikasi antara PC dengan rangkaian mikrokontroler bekerja dengan baik. Rangkaian Max232 dapat bekerja sebagai mana yang diharapkan dimana rangkaian Max232 berfungsi untuk mengkonversi tegangan level TTL ke tegangan level RS232.
4.7 Pengujian Rangkaian Keseluruhan
Pengujian ini dilakukan sebagai uji coba aplikasi komputer dan rangkaian hardware. Pada pengujian ini nantinya dapat disimpulkan apakah sistem ini bekerja dengan baik atau tidak.
Gambar 4.5 Tampilan Awal Output pada PC
Pada gambar di atas terlihat tampilan pada PC sebelum tag RFID di dekatkan dengan
readernya. Kemudian jika kita dekatkan tag RFID terhadap reader dengan jarak kurang dari 5 cm dan tidak ada mobil yang terparkir pada area parkir maka buzzer akan berbunyi kemudian palang akan terbuka dan tampilan pada PC juga sudah terbaca. Tampilan pada PC dapat terlihat pada gambar berikut.
Gambar 4.6 Tampilan pada PC Ketika Reader Membaca Tag RFID
Gambar 4.7 Palang Terbuka ketika Reader Membaca Tag RFID
Jika di area parkir sudah terisi oleh mobil maka sistem akan membacanya kemudian ditampilkan pada PC sesuai dengan posisi dimana mobil itu parkir. Kemudian jika pada area parkir tersebut sudah tidak ada lagi area kosong atau penuh maka palang tidak akan terbuka namun buzzer tetap akan berbunyi. Namun apabila ada tag yang tidak dikenali atau tag yang belum terdaftar maka buzzer tidak akan berbunyi dan palang juga tidak akan terbuka.
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil perancangan alat hingga pengujian dan pembahasan sistem maka penulis dapat menarik kesimpulan, antara lain :
1. Pada pengujian rangkaian secara keseluruhan sistem keamanan parkir menggunakan rfid dan pemanfaatan mikrokontroler sebagai alat penghitung jumlah kendaraan roda 4 telah dapat direalisasikan.
2. Semakin besar cahaya infra merah yang mengenai fotodioda maka semakin kecil tegangan yang keluar dari fotodioda. Begitu juga sebaliknya, semakin kecil sinar infra merah yang mengenai fotodioda maka semakin besar tegangan keluaran dari fotodioda.
3. Tag RFID dapat di baca dengan baik apabila tidak ada penghalang antara tag
RFID dengan RFID reader dan pada posisi tegak lurus terhadap RFID reader.
5.2 Saran
Dari penelitian yang telah dilakukan, terdapat beberapa hal yang dapat dijadikan saran untuk dapat dilakukan perancangan lebih lanjut, yaitu :
DAFTAR PUSTAKA
Agfianto Eko Putra. 2002. Teknik antar muka computer : konsep & aplikasi. Yogyakarta:Penerbit Graha Ilmu.
Agus Bejo. 2005. C & AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroller AT-MEGA 8535. Edisi pertama.Yogyakarta: Gaya Media.
Malvino. Albert Paul, Ph.D & Donald P.Leach, Ph.D. 2002. Prinsip Prinsip Elektronika. Jilid satu. Bandung: Salemba Tehnik.
Putra, A. E., 2003. Belajar Mikrokontroler AT89C51/52/55 Teori dan Aplikasi. edisi 2. Yogyakarta : Gava Media.
Rafiudin Rahmat. 2007. Belajar sendiri mikrokontroller AVR seri at mega 8535. Yogyakarta: Andi Y.
Syahrul. 2012. Mikrokontroller Dengan AVR at mega 8535 (Dengan Asembler).
Bandung: Informatika.
http://aviscena-ary.blogspot.com/2010/11/pengertian-bahasa-c.html. Diakses tanggal 09 Januari 2013
http://www2.ukdw.ac.id/kuliah/info/TI2023/Modul08A.pdf. Diakses tanggal 09
Januari 2013
http://id.wikipedia.org/wiki/Inframerah. Diakses tanggal 09 Januari 2013
http://id.scribd.com/doc/77630404/Fotodioda-Dan-LED. Diakses tanggal 09 Januari 2013
http://elektronikadasar.info/sensor-cahaya.htm. Diakses tanggal 09 Januari 2013
http://id.scribd.com/doc/31241125/Motor-Stepper. Diakses tanggal 30 Januari 2013
http://id.scribd.com/doc/50473130/Dasar-Motor-Stepper. Diakses tanggal 30 Januari 2013
http://en.wikibooks.org/wiki/Serial_Programming/MAX232_Driver_Receiver. Diakses tanggal 30 Januari 2013
http://www.8051projects.net/lofiversion/t9359/need-help-on-uln2803-ic.html. Diakases tanggal 06 Juni 2013
LAMPIRAN A
Rangkaian Lengkap Perangkat Keras
Rangkaian ini terdiri dari Rangkaian Power Supply (PSA), Mikrokontroller atmega8535, RFID Reader ID 12, Rangkaian Infra Merah – Fotodioda, driver max232
LAMPIRAN B
Program Mikro Kontroller Atmega8535
/***************************************************** This program was produced by the
CodeWizardAVR V2.05.3 Standard Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
AVR Core Clock frequency: 11,059200 MHz Memory model : Small
char serial,u;
for (u=0;u<120;u++)
if(card[4]=='5' && card[5]=='E' && card[6]=='3' && card[7]=='9' && card[8]=='3' && card[9]=='E' && card[10]=='8') n=1;
else if (card[4]=='5' && card[5]=='F' && card[6]=='5' && card[7]=='3' && card[8]=='F' && card[9]=='0' && card[10]=='7') n=1;
{
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTA=0x00;
DDRA=0xFF;
// Port B initialization
PORTB=0x00; DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=0xFF // Clock source: System Clock // Clock value: Timer1 Stopped // Mode: Normal top=0xFFFF // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
// Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off TCCR1A=0x00; // Clock source: System Clock // Clock value: Timer2 Stopped // Mode: Normal top=0xFF
UCSRC=0x86;
while (1)
If MSComm1.CommEvent = comEvReceive Then buffer = MSComm1.Input
pisah = Split(buffer, Chr$(13)) On Error Resume Next
End If
If d = 0 Then
Text5 = " tidak tersedia" End If
If d = 1 Then Text5 = " tersedia" End If
If e = 0 Then
Text6 = " tidak tersedia" End If
If e = 1 Then
Text6 = " tersedia" End If
End Sub
LAMPIRAN C