INDRA JAYA, C 161 360. REDUKSI REVERBERASI DENGAN NARROW BEAM RECEIVER PADA SONAR UNTUK AKURASI INTERPRE-TASI TARGET (Dibawah bimbingan BONAR P. PASARIBU dan
A. U. AYODHYOA).
s。ャセィ@ satu pembatas utama da1am pendeteksian kelom-pok ikan adalah reverberasi. Reverberasi dapat sebagian menutupi sinyal echo (echo ikan) sehingga menyulitkan, kadang tidak memungkinkan penerimaan sinyal. Penutupan
sinyal ini terj adi j ika besarnya penerimaan sinyal echo lebih kecil daripada peringkat reverberasi pada waktu dan jarak tertentu.
Pada sistem electronic sector scanning sonar (ES 3), penggunaan narrow beam receiver akan memperkecil efektif target strength latar be1akang terhadap echo ikan.
Se-lain i tu, teknik scanning dan kemampuan resolusi tinggi yang dimiliki ES
3 mampu menekan reverberasi pada pering-kat yang sangat rendah. Dengan rendahnya reverberasi
ini, maka penerimaan sinyal jelas.
l
REDUKSI REVERBERASI
DENGAN NARROW BEAM RECEIVER PADA SONAR
UNTUK AKUHASI INTERPRETASI TARGET
KARYA ILMIAH
oIeh
INDRA JAVA
C 161 360
FAKUL TAS PERIKANAN
INSTITUT PERTANIAN BOGOR
1984
DENGAN NARROW BEA\! RECEIVER
PADASONAR
UNTUK AKURASI INTERPRETASI TARGET
KARYA ILMIAH
Da1am JurusanPemanfaatan Sumberdaya Perikanan
01eh
INDRA JAYA
C. 161 360
FAKULTAS PERIKANAN
INSTITUT PERTANIAN BOGOR
DENGAN MARROW BEAM RECEIVER PADA SONAR
UNTUK AKURASI INTERPRETASI TARGET
KARYA ILMIAH
Sebagai salah satu syarat untuk memperoleh
gelar Sarjana Perikanan pacta Fakultas Perikanan
Institut Pertanian Bogar
Mengetahui:
BAMBANG MURD IY ANTO
Ketua
24 September 1984
Tanggal lulus
Oleh
INDRA JAYA
.'
Menyetujui:
Dosen Pembimbing,
---"
1/1
;f
if
/fJt:?tLvLf'
v \..
BONAR
p.PASARIBU
/
kセ。@
//
Njコセ@
.. ,
«
Oイ[LZZZZ[セL@
INDRA JAYA, C 161 360. REDUKSI REVERBERASI DENGAN NARROW BEAM RECEIVER PADA SONAR UNTUK AKURASI INTERPRE-TASI TARGET (Dibawah bimbingan BONAR P. PASARIBU dan
A. U. AYODHYOA).
s。ャセィ@ satu pembatas utama da1am pendeteksian kelom-pok ikan adalah reverberasi. Reverberasi dapat sebagian menutupi sinyal echo (echo ikan) sehingga menyulitkan, kadang tidak memungkinkan penerimaan sinyal. Penutupan
sinyal ini terj adi j ika besarnya penerimaan sinyal echo lebih kecil daripada peringkat reverberasi pada waktu dan jarak tertentu.
Pada sistem electronic sector scanning sonar (ES 3), penggunaan narrow beam receiver akan memperkecil efektif target strength latar be1akang terhadap echo ikan.
Se-lain i tu, teknik scanning dan kemampuan resolusi tinggi yang dimiliki ES
3 mampu menekan reverberasi pada pering-kat yang sangat rendah. Dengan rendahnya reverberasi
ini, maka penerimaan sinyal jelas.
Tulisan yang disusun berdasarkan telaah pustaka ini, membahas tentang pengaruh reverberasi terhadap interpre-tasi target dan peranan narrow beam dalam usaha mereduksi
reverberasi. Di samping itu pengetahuan tentang mengope-rasikan alat-alat akustik dilakukan dalam praktek di "KM TENGGIRI" dari tanggal 19 sampai dengan 26 Juni 1984.
Penyajian ini merupakan salah satu syarat untuk mem-peroleh gelar Sarj ana Perikanan pada Fakultas Perikanan,
Institut Pertanian Bogor.
Atas pengenalan disiplin ilmu perikanan (khususnya dalam ruang lingkup pemanfaatan sumberdaya), dan masa-masa yang berharga selama berada di Jurusan Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan, Institut Perta-nian Bogor, penulis ucapkan terima kasih pada segenap staf jurusan. Pada Bapak Dr Bonar P. Pasaribu dan Bapal, A. U. Ayodhyoa, MSc. selaku dosen pembimbing, atas bantu-annya selama penulisan karya ilmiah ini, penulis ucapkan terima kasih.
Pada kesempat an ini pula, penulis t ak lupa mengucap-kan terima kasih pada Direktur Bina Sumberdaya Hayati -Direktorat Jenderal Perikanan serta segenap crew KM TENGGIRI
atas bantuan fasilitas dan penjelasan-penjelasan yang di-berikan selama praktek.
an tinggi setiap peserta didik diajarkan dan diikutserta-kan mengembangdiikutserta-kan cara berpikir dan berlaku lebih siste-matis dan sistemik. Pada Ibu dan Tata, terima kasih atas pemberian tersebut.
Bogar, September 1984
Halaman
DAFTAR GAMBAR . vi
DAFTAR LAMPIRAN viii
1. PENDAHULUAN 1
2. KONSEP-KONSEP PENDUGAAN DENGAN MET ODE AKUSTIK
DAN TEORI REVERBERASI . . . . • • . . . , 7
2.1 Konsep-konsep Pendug-aan dengan Metode Akust ik • . . . • . . . .
2.1.1 Persamaan Akustik
.
.
.
2.1.2 Pengukuran Volume Backscattering
7
7
Strength . . . • • . . . • . 10 2.1.3 Pengukuran Bottom Backscattering
Strength . . . • • . . . 15 2.1.4 Pengukuran Mean Volume
Back-scattering St rength • . • . . 16
2.1.5 Pengukuran Kepadatan Relatif dan
Kepadatan Mutlak • • . . . 19
2.1.6 Penentuan Kepadatan Rata-rata
pa-da Areal Tertentu 21
2.2 Teori Reverberasi 22
2.2.1 Teori Reverberasi Kolom 22
2.2.2 Teori Reverberasi Permukaan 25
2.2.3 Reverberasi yang Teramati di Laut 28
3. ELECTRONIC SECTOR SCANNING SONAR (ES
3) 31
3.1 Garis Besar Sistem ES
3 31
3.2 Cara Kerja ES
3 33
3.3 Multiplicative Signal Processing (MSP) 3b
3.4 to-Noise Ratio (SNR) dan Signal-to-Reverberation Ratio (SRR) pada ES
3. 38
4. PEMBAHASAN.. . .
.
..
.
.. .. ..
.
.
404.1 Pengaruh Reverberasi Terhadap Ketepatan
4.2
Pengaruh Narrow Beam Terhadap
Reverbe-rasi
5.
PENUTUP.
DAFTAR PUSTAKA
RIWAYAT HIDUP •
LAMP IRAN
.
.
•44
46
48
51
Nomor Halaman
1. Pengorganisasian Jalan Pemikiran Penyusunan
Karya Ilmiah . . . . 6
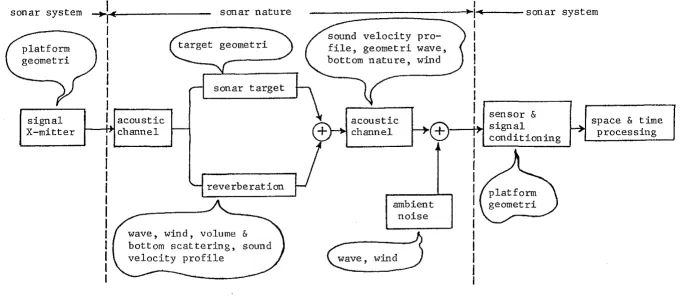
2. Sistem Sonar dan Parameter-parameternya 9
3. Ilustrasi Acoustic Backscattering oleh Suatu
Volume Kecil, dV . . . • . 11
4. Skema Pengolahan Gelombang Reverberasi 14
5. Kurva Bottom Backscattering Strength 15
6. Ilustrasi Sampling MVBS 18
7. Survai Track Penentuan Kepadatan Rata-rata 21
8. Volume Efektif • . 25
9. Daerah Reverberasi Efektif 26
10. Orientasi Vertikal Transducer 27
11, Orientasi Khusus Transducer 27
12. Pendeteksian Dasar Laut
.
.
3013. Skema Sistem Electronic Sector Scanning
Son 。イセMN@ • . 32
14. Cara Kerja ES
3 34
15. Sistem Multiplicative Signal Processing 36
16. Tahap-tahap Pengolahan Sinyal Secara
Multi-plicative . . . • • • . . • • 37
17. Dead Zone yang Terbagi Atas Dua Bagian 42
18. Ilustrasi Pendeteksian dengal1 Wide Beam dan
19. JFS-688 Scanning Sonar . .
20. JFS Scanning Sonar Display (PPI)
21. Scanning Sonar Recorder
22. Echo Sounder (freq: 50 kHz dan 200 kHz)
23. SIMRAD Colour Display CF-IOO
24. SIMRAD Echo Integrator QM-MK II
25. SIMRAD FK 400 Computerized Integrator
56
57 57
58
58
Nomor
1.
2.
Daftar Istilah • • • . • • • ! • • •
Alat-alat Akustik yang Terdapat pada KM TENGG IRI • . • • • • • • • • • •
Halaman
53
Informasi yang akurat tentang kepadatan atau
kelim-pahan stok suatu perairan akan sangat membantu
rasionali-sasi pengelolaan ekonomi dan perumusan
kebijakan-kebijak-an pengembkebijakan-kebijak-angkebijakan-kebijak-an usaha perikkebijakan-kebijak-ankebijakan-kebijak-an (CUSHING, 1979; SUOMALA
and LOSOW, 1981; MATHISEN, 1982; LAO, 1983). Hal ini
juga sekaligus sebagai suatu upaya menj amin kelangsungan
hidup stok di masa depan. Agar diperoleh informasi yang
lebih akurat tersebut, haruslah ada masukan sains dan
telmologi sehingga dapat dipertimbangkan metode-metode
yang sesuai pemanfaatannya dalam perikanan.
Salah satu metode yang relatif baru untuk menduga
kelimpahan stok ikan ialah penggunaan metode akustik.
Menurut PASARIBU (1982), hasil dugaan metode akustik
da-pat diperoleh secara langsung, singkat dan cukup akurat.
Selain itu, metode akustik mampu meliput areal yang luas.
Kemampuan ini sangat penting dalam memonitor pergerakan
ikan (MATHISEN, 1982).
Pendugaan kelimpahan stok dengan met ode akustik
te-lah dilaksanakan di beberapa perairan di Indonesia. Di
perairan Jawa Banet bagim, Selatan dilakukan pendugaan
stok ikan pelagik, dan survai perikanan lemuru di Selat
Bali (VINCENTIUS, 1980). Di Selat Makassar dan Laut
Su-lawesi (NACHROWI, 1981), dan di Kepulauan Anambas dan
Kepulauan Natuna - Laut Cina Selatan (SUHENDAR, 1983)
Di luar negeri, pendugaan stok ikan dengan metode akustik telah dilalmkan di perairan Peru dalam survai ke-limpahan stok ikan anchoveta (VILLANUEVA, 1966), di per-airan Jepang (NISHIMURA et al., 1967), dan di perper-airan seki tar pulau-pulau kecil sebelah barat Inggris (MIDTTUN, 1972) .
Menurut laporan CSIRO (1980), permasalahan penerapan metode akustik dalam perikanan laut, baik dalam penentuan
lokasi dan penangkapan ikan maupun dalam pendugaan stok yang ditemui oleh para akustisi dan operator sonar adalah yang berhubungan dengan: (1) reverberasi latar belakang
(background reverberation) yang dihasilkan oleh pengham-buran (scattering) di dalam laut, (2) echo terputus-putus yang di'sebabkan oleh pemantulan di dalam laut. Gangguan (interference) reverberasi ini akan mempengaruhi "kuali-tas" echo yang di terima, dan selanjutnya mempengaruhi
ni-lai dugaan. Dengan kata lain, untuk mendapatkan nilai dugaan dengan ketepatan tinggi perlu diperhitungkan pe-ngaruh reverberasi.
Masalah gangguan reverberasi ini akan terus menyulit-kan penerimaan sinyal echo, jika reverberasi masih menjadi
faktor dominan. Untuk mendapatkan penerimaan sinyal yang jelas, sinyal echo harus berada lebih tinggi dari rever-berasi. Hal ini dapat dicapai melalui dua cara, yakni menaikkan sinyal echo atau menekan reverberasi para
Masalah lain yang timbul berhubungan dengan sulitnya pendeteksian adalah terbentuknya "dead zone". Dead zone dimaksudkan sebagai daerah dimana pendeteksian (dalam hal
ini pengambilan contoh dengan metode 。ィセウエゥォI@ tidak di-mungkinkan .
Untuk mengatasi masalah penerimaan sinyal echo dan luasnya daerah (volume) yang t idak dapat diarnbil con toh-nya dengan metode akustik, dalam tulisan ini, diusulkan
gagasan penggunaan narrow beam.
Dengan penggunaan narrow bearn, sinyak echo diharap-kan sedikit mungkin mengalarni gangguan dengan dapat di-tekannya reverberasi pada peringkat yang rendah. Pene-kanan ini dimungkinkan oleh karena semakin mengecilnya kekuatan efel';:tif latar belakang target.
Kemungkinan besarnya volume dead zone diperkecil dapat ditunjukkan dengan jalan mempertimbangkan bentuk
geometri beam yang dipancarkan. Hasil studi teoritis da-lam tulisan ini menunjukkan bahwa penjumlahan total beam-beam sempit (narrow bearn) akan menghasilkan volume dead zone yang lebih kecil dibanding penggunaan beam lebar
(wide bearn) pada luas daerah liputan yang sarna.
masalah. Persamaan akustik yang menggambarkan penampilan sistem akustik, serta berbagai pengukuran tentang volume backscattering strength, bottom backscattering strength, mean volume backscattering strength, kepadatan relatif dan kepadatan mutlak, dan kepadatan rata-rata pada areal tertentu diutarakan pada Bagian II. Pada Bagian II
di-singgung pula tentang teori reverberasi, baik reverberasi dasar maupun reverberasi volume. Gejala maupun fakta ten-tang reverberasi yang terj adi di laut disertakan pu lao Bagian III menggambarl{an electronic sector scanning sonar
CES3), meliputi garis besar sistem, cara kerja, pengguna-an multiplicative signal processing, dpengguna-an signal-to-noise ratio dan signal-to-reverberation ratio pada ES
3. Penga-ruh reverberasi terhadap ketepatan pendeteksian dan pe-ngaruh narrow beam terhadap reverberasi dibahas pada
Ba-gian IV. Bagian V merupakan penutup at au kesimpulan dari isi tulisan ini.
Pengalaman praktek yang dilakukan di KM TENGGIRI sa-ngat berharga dalam rangka awal pemahaman terhadap per-masalahan penerapan metode akustik. Adapun alat-alat
akustik yang sempat dipelaj ari dan dipraktekkan cara
ーセョァッー・イ。ウゥ。ョョケ。@ secara manual adalah echo sounder,
Dari hasil studi teori tis ini, ditunjukkan bahwa pa-da sistem ES
3 penggunaan narrow berun akan memperkecil efektif target strength latar belakang terhadap sinyal echo. Selain itu, teknik scanning dan kemampuan resolusi tinggi yang dimiliki ES
3 mampu menekan reverberasi pada peringkat yang sangat rendah. Dengan rendahnya peringkat reverberasi atau berkurangnya gangguan reverberasi ini, maka penerimaan sinyal jelas, dan hal ini beI'aI'ti pula
MASALAH
Keterangan:
penerimaan sinyal echo tidak jelas
luasnya (volume) dead zone
t
t
t
I
penggunaan wide beamNB - Narrow Beam
srr - signal-to-reverberation ratio dz - dead zon c
1---;----<
dz
mengecilGambar 1. Pengorganisasian jalan pemikiran penyusunan Karya Ilmiah
[image:18.771.83.698.68.436.2]TEORI REVERBERASI
2.1 Konsep-konsep Pendugaan dengan Metode Almstik
Dalam pendugaan stok dengan met ode akustik digunakan sejumlah asumsi-asumsi yang disederhanakan berhubungan dengan penyebaran dan kepadatan kelompok ikan.
Asumsi-asumsi yang digunakan antara lain: perambat-an gelombperambat-ang akustik berada pada garis lurus dengperambat-an tetap mempertimbangkan "spreading loss", il,an tersebar dengan
peluang yang sarna dalam keseluruhan kolom yang ditempati oleh setengah panj ang pulsa pada sembarang range, dan t i -dak terdapat penghamburan berganda (multiple scattering).
2.1.1 Persamaan Akustik
Persamaan akustik adalah persamaan yang dapat meng-gambarkan penampilan dari suatu sistem akustik (sistem sonar). Persamaan akustik terbentuk dari interaksi suara
(termasuk efek dari "spreading loss" dan "absorption loss") dan karakteristik penghamburan target (CLAY and MEDWIN, 1977) .
Peralat an meliputi peringkat sumber suara (source level, SL) dan '!directivity characteristic", dan juga pe-ringkat noise (noise level, NL) peralatan. Medium ber-peran dalam menentukan besarnya "transmission loss" (TL), peringkat reverberasi (reverberation level, RL) dan
"ambient noise". Sedang target berperan dalam penentuan target strength (TS). Target Strength menyatakan besar-nya sibesar-nyal pantulan atau yang dihamburbalikkan
(back-scattered) dari target pada satuan jarak dari target ke arah transducer.
CARUTHERS (1977) menyatakan bahwa persoalan dasar yang dihadapi dalam akustik menyangkut cara pengukuran sejumlah sinyal (kemungkinan echo) terhadap reverberasi. Agar supaya sinyal dapat didetel,si (melampaui reverbera-si latar belakang), rareverbera-sio reverbera-sinyal terukur terhadap latar belakang terukur (signal-to-noise ratio) haruslah se-kurang-kurangnya berada pada nilai minimum yang ditentu-kan oleh sistem.
Secara umum, kriteria rancangan agar dapat berfung-sinya sistem akustik dinyatakan oleh pertidaksamaan ber-ikut: SIGNAL セ@ tIDS; DT + NL
Dasar kondisi operasional minimal bagi sistem sonar ada-lah DT ; tIDS - NL, dimana DT (detection threshold) meru-pakan peringkat kesanggupan deteksi sinyal minimum (mini-mum detecable signal, 1IDS) sewaktu NL sama dengan 0 dB. Dengan kata lain DT adalah kesanggupan deteksi minimum
platform geometri signal X-mitter I
---:::::::::======:::::--.\ ....
I
I
I
I
I
I
r - - - ,I
acousticヲMMMKセ」ィ。ョョ・ャ@
target geometri
sonar target
wave, wind, volume &
bottom scattering, sound velocity profile
sound velocity
pro-file, geometri wave,
bottom nature, wind
I
I
I
acoustic channel ambient noiseC;ve, wind
j
I
I
I
i
sensor &GM⦅セ@ signal
conditioning
Gambar 2. Sistem sonar dan parameter-parameternya
(Sumber: Griffth セ@ al. (ed), 1973)
space & time
[image:21.771.35.718.78.383.2]Persamaan akustik untuk menentukan ambang deteksi (detection threshold, DT) mengikuti persamaan :
DT
=
SL - 2TL + TS - NL, dalam kondisi noise adalah "iso-tropic", dan transducer (receiver) "non-directional".Dalam kasus ini sistem dikatakan berada dalam keadaan noise terbatas (noise limited).
Apabila transducer berarah (directional) dengan "di-rectivity index", DI, persamaan di atas menjadi :
DT
=
SL -2TL + TS - NL + DIJika energi yang dipancarkan transmitter ke dalam air sehingga peringkat reverberasi, RL melampaui peringkat noise terukur, persamaan di atas menjadi :
DT
=
SL - 2TL + TS - RL + AG, dimana AG adalah "arraygain" yang mesti digunakan menggantikan DI karena RL tidak isotropic. Dalam kasus ini sistem dikatakan berada rever-berasi terbat as (reverberation-limited).
2.1.2 Pengukuran Volume Backscattering Strength
transducer
Garnbar 3. Ilustrasi acoustic backscattering oleh suatu volume kecil, dV (Sumber:
Johannesson and Mit son , 1983)
c adalah kecepatan gelombang akustik dalam air, dan d.D. adalah solid beam angle.
Diperlukan penentuan intensitas penghamburanbalik akustik (acoustic backscattering intensity) dari volume ini, dan untuk melakukannya diperlukan suatu pengertian yang mirip dengan TS, yakni "volume backscattering coef-ficient", s . Volume backscattering coefficient
didefi-v
nisikan sebagai ratio dari intensitas hamburan balik (backscatter intensity), I
b , yang dihasilkan oleh satuan volume pada jarak 1 meter dari volume terhadap intensi-tas gelombang yang mengenai target (incident intensity,
Ii)' dalam hal ini :
Sv
=
Ib/Ii dan Sv=
10 log SvVolume dV (pada Gambar 3) menj adi : s .R 2
.co
.d.fl,v
sehingga untuk keseluruhan beam, substitusi d.fl dengan
l.j5,
2dV
=
sv. R.cr. .'0/.
Penentuan peringkat reverberasi (RL) dapat dicari dari persamaan di atas. Jika intensitas transducer ada-lab I, al,an tereduksi sebesar R4 (= 40 log R) yaitu se-wal,tu merambat dari transducer ke volume dV dan sebalik-nya.
RL
=
IR -4 sv. R . c 1:, • 2'!f1,
dalam bent uk logari tmaRL
=
SL-20 log R+10 log Sv + 10 log C0 + 10 log0/
Pada prakteknya, absorption loss, 2.(R, dalam hal inioCjika digunakan time varied gain (TVG) nilai ini dapat di-kompensasikan sehingga tidal, muncul dalam persamaan.
Volume backscattering strength, S merupal,an proper-v
ty scattering layer. Hal ini berbeda dengan TS, dimana pada TS hanya dapat memberikan gambaran karakter terhadap objek tunggal, tidak terhadap scattering layer at au obj ek yang bervmjud volume lainnya sebab TS akan tergantung pa-da beam pattern pa-dan juga panj ang pulsa (pulse length).
Volume backscattering strength dapat ditentukan de-ngan persamaan berikut:
S セ@ V - SL - VR + (20 log R + 2.cR) + 10 logl'!
v rms
r
-10 log c セ@ /2 "
dimana V
rms セ@ tegangan pada output terkalibrasi VR セ@ receiving voltage dB//l volt perf Bar
Pada Gambar 4, tekanan gelombang membentuk aksi RL pada transducer yang diterima, menghasilkan tegangan VRT
(voltage at transducer terminal) sebesar RL + SRT, sehing-ga: VRT セ@ SL + SRT + Sv + 10 log 」セOR@ + 10 log セQ@
Gambar 4, memperlihatkan tegangan VRT diolah melalui echo sounder, mula-mula oleh gain amplifier tetap, G
1, dan ke-mudian dalam amplifier TVG, G
2. Gaim amplifier TVG biasa-nya memberikan gambaran range maksimum TVG. Semua
tegang-an dari echo sounder dikuadratktegang-an dalam eCho-integrator untuk dikonversikan dari tegangan ke intensitas.
Echo-Integrator Depth Selector VR2
TInS
Echo Sounder
Squarer VR TVG amplifier Pre-amplifier VRT
Transducer
\t _________
S_R_T ______セLQ@
I \
I
I RL \
I \
I \
I \
I \
I \
I \
I \
I \
I \
I \
I \
/ \
I \
I \
[image:26.490.67.417.88.647.2]/ \ / I I I I I I EVERBERASI
Gambar 4. Skema pengolahan gelombang reverberasi
2.1.3 Pengukuran Bottom Backscattering Strength
Sewaktu gelombang suara mengenai dasar perairan, se-bagian dari energi yang mengenai dasar perairan (incident energy) akan dipantulkan. Energi pantulan ini akan
di-sebarkan ke segala arah. Sebaran energi akibat pantulan ini sepenuhnya tergantung pada kekasaran permukaan dasar.
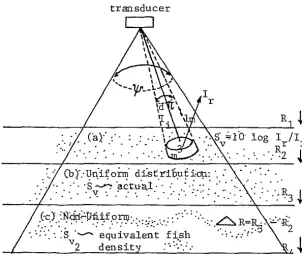
Bottom backscattering strength, Ss' didefinisikan sebagai intensitas suara yang dihamburbalikkan dari per-mukaan dasar 1 m2 ke arah transducer (indeks "s" menanda-kan "surface", dalam konteks ini dimaksudmenanda-kan sebagai per-mukaan dasar).
Besarnya bottom backscattering strength tergantung pada sudut datang (grazing angle) suara yang tiba pada permukaan dan struktur dasar perairan (lihat GambaI' 5).
rough bottom
Grazing angle Grazing angle
GambaI' 5. Kurva bottom backscattering strength (Sumber: SUIRAD, 1968)
Secara kuantitatif, bottom backscattering strength dihi tung (SIMRAD, 1968) dengan persamaan berikut:
V
-dimana bb' - beam pattern transducer dA - elemental bottom area
-e- -
sudut dengan arab tegak lurus ke bidang radiasi¢ -
sudut dari arah acuan tertentu2.1.4 Pengukuran Mean Volume Backscattering Strength (MVBS)
Mean volume backscattering strength adalah rata-rata Spada satu atau lebih pancaran pada selang range (6 R)
v
dan satuan jarak tertentu.
Untuk selan g kedalaman L::,. R
=
R2 - R1, volume back-scattering strength untuk satu pancaran adalah merupakan pengukuran intensi t as akustik yang dipantulkan seket ika pada tiap-tiap m3 penambahan air dan dirata-ratakan ter-hadap L::,. R. Sepanjang jarak yang dilayari, hasil MVBS
adalah MVBS per pancaran (radiasi), dirata-ratal,an ter-hadap 6.R dan satuan jarak yang relevan.
Secara logari tma
S
dapat dinyat akan sebagai vセ|@ = 10 log?v + TS
dimana TS - rata-rata TS individu ikan dalam keseluruhan volume teradiasi
?v -
rata-rata kepadatan (ikan/m3)Mean volume backscattering strength pancaran akustik tunggal yang melewati selang jarak .6R = R2 - R1 selan-jutnya dapat dinyat akan sebagai jumlah pulsa "volume scattering coefficient" individu dibagi selang jarak. Dengan demikian,
S
v
dimana C. - mewakili parameter instrumen seperti
l
SL, SRT,
N = .6R/c C/2 - adalah banyaknya panjang pulsa yang terjadi dalam selang
(V
? -
Imadrat tegangan output ke-no n
Dalam survai sebenarnya, nilai MVBS rata-rata yang terja-di pada j arak 1 mil laut adalah :
t=T MVBS1 .1 =
s--
=L
1x
S IT
-ml vv t= v x
dijllana T - jumlah total pancaran selama 1 mil
x
s-- -
rat a-rat a dari rat a-rat a pulsa volume back-vvscatter
Dari pernyataan-pernyataan di at as , ada dua faktor penting yang dapat dikemukakan: (1) MVBS merupakan
seluruh volume selang kedalaman, namun bukan merupakan
kepadatan sebenarnya, diilustrasikan pada Gambar 6.
transducer
[image:30.496.100.402.159.413.2]R セ@
Gambar 6. Ilustrasi sampling MVBS
(Sumber: Johannesson and Mitson, 1983)
Menurut JOHANNESSON and MITSON (1983), walaupun MVBS
dapat mengukur kepadatan biomas relatif (TS tidak
diketa-hui), seperti nilai pengamatan M (dibahas pada bagian
2.1.5), terdapat perbedaan penting: MVBS berlaku umum
sedang nilai M menggambarkan jumlah yang berbeda-beda
(arbitrary). Sehingga nilai MVBS yang diperoleh dari
sa-tu kapal/sistem pada daerah tertensa-tu langsung dapat
di-bandingkan dengan nilai MVBS yang dikumpulkan oleh kapal/
serupa antara nilai M dari dua kapal survai yang berbeda
tidak dapat dipakai, sebab nilai-nilai ini tergantung
pa-da scattering parameter pa-dan juga papa-da pemilihan
pemasang-an kontrol.
Dengan bantuan integrat or, SAETERSDAL et al. (1982),
menghitung MVBS dengan persamaan
Sv
=
10 log I - A + VOl - 10 log セr@ + C1 + C2dimana I - integrator output (mm)
A - integrator gain (dB)
VOl - tetapan penampilan integrator
6R - selang pencatatan
- tetapan echo sounder
- tetapan echo sounder sewaktu digunakan (setting)
2.1.5 Pengukuran Kepadatan Relatif dan Kepadatan Mutlak
(1) Pengukuran Kepadatan Relatif
Nilai-nilai pengamatan yang diperoleh
echo-integra-tor (11
1 , 112 , 113 . . .) sewaktu melakukan survai kepadat an
populasi, merupakan survai kepadat an populasi, yakni
peng-ukuran langsung 1-mil echo-abundance index terhadap volume
air yang teradiasi dengan pulsa (insonified), dan
kepadat-an area I"818tif (biomasjmi12) antara satuan jarak.
Echo-abundance index selain merupakan fungsi
kepadat-an ikkepadat-an juga sekaligus sebagai fungsi ketebalkepadat-an lapiskepadat-an
ikan yang terdapat dalam bat as-bat as kedalaman
(2) Pengukuran Kepadatan Mutlak
Menurut MIDTTUN and NAKKEN (1977), hasil keluaran
echo-integrator pada survai stok ikan secara akustik
ada-lah berbanding langsung dengan kepadatan ikan yang
di-amati, yakni
;0
=
C x M (JOHANNESSON and MITSON, 1983).Konversi nilai kepadatan relatif dalam milimeter
(nilai keluaran integrator) ke kepadatan mutlak (tonjmi12)
diperoleh melalui perkali an dengan tet apan 'C'. Tet apan
konversi integrator ini memegang peranan penting dalam
transformasi dari kepadatan relatif ke kepadatan mutlak
(JOHANNESSON and MITSON, 1983).
Dari hasil pendekatan teoritis dan hasil praktis
pengukuran suatu percobaan dengan menggunakan dua met ode
pengukuran, yakni "standard sphere" dan "hydrophone",
VOROBYOV et al. (1981) merekomendasikan pengukuran
tetap-an C dengtetap-an menggunaktetap-an sttetap-andard sphere. Kemudian
STEP-NOWSKI and BURCZYNSKI (1981) memberikan persamaan untuk
menentukan nilai C sebagai berikut:
10 log C
=
10 log 3430 + Sv - TS1 kg+ 10 log セr@ -10 log
M
dimana '1'Slkg
=
TS - 10 log n1kgDengan met ode lain, FOOTE, KNUDSEN and VESTNES (1982)
menggunakan digital integrator (multi channel computerized
integrator) dan kalibrasi tingkat lanjut dengan target
standar menduga kepadatan mutlak melalui pengukuran MVBS
(JOHANNESSON and MITSON, 1983). Kepadat an dihitung
mela-lui persamaan dalam bantuk antilog:
2.1.6 Penentuan Kepadatan Rata-rata pada Areal Tertentu Penentuan kepadatan ikan rata-rata merupakan kombi-nasi proses pengukuran dan analisa statistik.
Pada GambaI' 7, penentuan kepadatan ikan rata-rata pada daerah A dengan ni1ai pengamatan 11
1 , 112 , M3,
M dan tetapan ka1ibrasi C, menggunakan rumus:
n
j=N
=
C(C
j=l
M.)
IN
JMenurut JOHANNESSON and MITSON (1983), rumus ini hanya ber1aku jika nilai 11 diperlakukan sebagai variabel acak kontinyu, memenuhi fungsi peluang kepadatan yang dapat didekati dengan sebaran normal. Jika hal tersebut ben ar, C merupakan tetapan kalibrasi tal<;: berbias, sehingga hasil dugaan kepadatan rata-rata pun tak berbias.
survai track
[image:33.492.154.340.440.573.2]2.2 Teori Reverberasi
Sebagai t amb ah an dari echo target dan ambient noise, sonar akan menerima sebagian energi yang dipancarkannya sendiri dalam bent uk echo yang tidak dikehendaki. Energi kembalian hasil pantulan bebas titik-titik pemantul atau penghambur yang tersebar dalam medium ini dikenal sebagai reverberasi. Berbagai-bagai ketidakseragaman dalam kolom dan pada permukaan yang membatasi medium memberikan pe-ngaruh terhadap penghamburan ini (JOHNSEN, 1973; CARUTHERS, 1977) .
Teori reverberasi (CARUTHERS, 1977) dibangun dalam dua bentuk: (1) reverberasi kolom (volume reverberation), dan (2) reverberasi permukaan (surface reverberation). Reverberasi permukaan secara fisik kemudian dibagi menjadi dua: permukaan laut dan permukaan dasar laut.
2.2.1 Teori Reverberasi Kolom
Pada reverberasi kolom, penghamburan suara oleh ke-tidakseragaman dalam air dapat berkisar antara dua ekstrim:
(1) penghamburan Rayleigh, oleh partikel yang jauh lebih keci 1 daripada panjang gelombang,
A
,
pancaran. Pengham-buran ini tidak tergantung pada bentuk dari penghambur, namun tergantung pada pangkat dua frekuensi, (2)pemantul-an geometrik teratur, oleh objek ypemantul-ang lebih besar daripada
Berbagai organisme plankton dan ikan-ikan muda ber-ukuran lebih pendek dari
A
akustik. Gelembung gas yang dihasilkan oleh al,tivitas hidup plankton ini mempunyai kemampuan memantul (reflectivity) yang lebih besar dari plankton itu sendiri (YUDANOV and KALIKHMAN, 1982). Hal ini sangat mempengaruhi karakteristik akustik dalam per-hitungan .Menurut CARUTHERS (1977), untuk menggambarkan rever-berasi kolom secara kuanti tatif, diperlukan konsepsi ten-tang volume scattering coefficient (m ) dan volume
scat-v
tering strength (s ).
v
Volume scattering coefficient, m , didefinisikan se-v
bagai daya (power) per satuan intensitas dan volume peng-hamburan yang dihamburkan oleh volume kecil (V) dari in-tensitas
ini: m
v
gelombang
p
scat
= LV
yang mengenai bidang (I), dalam hal
-1
(L ), dimana P scat adalah total daya yang dihamburkan be a'll. Karena m V mempunyai dimensi area
v
dan memotong daya I(m V), maka m dapat ditafsirkan
seba-v v
gai "effective cross-sectional area" dari volume pengham-buran. Dengan demikian m dapat pula disebut "backscatter
v
cross-section" .
Volume scattering st!'ength, s , merupakan intensitas v
I
dalam hal ini: Sv
(-61-,</,)
=
セセセエ@
HM・MLセI@
(L -3), dimana Iscat HMサtLセI@ adalah in tensi t as yang dihamburkan dari beam dengan arah(-\r,t)
dan diukur pada jarak acuan dari pusat akustik penghambur. Volume backscattering strength ada-lah scattering strength berarah backscatter.Total scattering strength dari volume laut teradiasi
I
suara adalah:
ウセ。エ@
=
I
svdV.v
Biasanya s diasumsikan v
tetap dalam volume sehingga integral tereduksi menjadi s V. Nilai decibel dari total
v scattering strength adalah
ekuivalen dengan TS, sehingga:
10 log V.
I
scat TS
=
10 log I=
Sv
Peringkat reverberasi kolom (RL ) adalah peringkat v
+
bidang gelombang sepanjang aksis almstik yang tiba pada transducer (receiver) menghasilkan respon hydrophone yang sa.ma dengan reverberasi.
RL
=
SL - 2TL + S + 10 log iT, dimana V adalah "effectivev v
insonified volume". Volume efektif di tentukrul dengan:
2 4TG
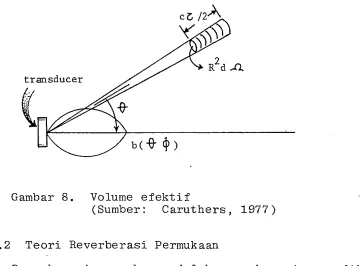
iT = r (c 0/2)jb(-\T,t) b l HM・MLセI@ d.Q, dimana
t:.
adalah pulseo
duration dan b dan bl masing-masing adalal1 pola beam
pan-caran dan penerimaan, lihat Gambar 8.
4n;
Nilai
.f
「HMャtLセI@ bl HELセI@dD dikenal sebagai "equivalent
o
solid angle beOL'!1width" (7.lS). Jika diasumsikan terj adi "sperical spreading",
RL = SL - 40 log R + v
RL dapat dituliskan sebagai :
v
2
transducer
Gambar 8. Volume efektif
(Sumber: Caruthers, 1977)
2.2.2 Teori Reverberasi Permukaan
Reverberasi permukaan adalah reverberasi yang diha-silkan oleh penghamburan energi akustik dari permukaan ketimbang dari kolom medium. Permukaan-permukaan yang dimaksud dalam akustik bahwa air adalah permukaan atas dan permukaan dasar laut.
Seperti halnya pada reverberasi kolom, untuk memper-oleh gambaran reverberasi permukaan secara kuantitatif perlu pula diketahui beberapa konsepsi dasar. Surface scattering coefficient, m , merupakan daya per satuan
in-s
tensitas dan penghamburan daerah permukaan yang dihambur-kan oleh permukaan keci 1 (A) dari in tens it as (I) ge lombang
P
scat
yang mengenai bidang, dalam hal ini: ms = (tak
ber-LA
dimensi) . Surface scattering strength, s , adalah inten-s
daerah permukaan yang dihamburkan oleh daerah kecil dari bidang gelombang yang mengenai target dan diukur pada sa-tuan jarak acuan dengan arah C-e-,t) dalam hal ini
IscatC-€)-,t)
Ss
cM・MLセI@
=
LAPeringkat reverberasi permukaan, RL adalah: s
RL
=
SL - 2TL + S + 10 log A, dimana A merupakandae-s s
rah reverberasi efektif.
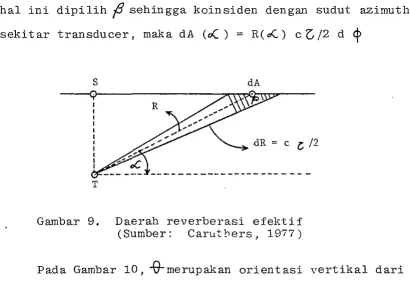
Konsepsi daerah reverberasi efektif dapat diterang-kan sebagai berilmt: pada Gambar 9, sudut,,(, dan
セ@
mewa-kili sudut-sudut pada ti tik P pada permukaan relatif ter-hadap posisi transducer CT), dan misalnyaf3
=t '
dalam hal ini dipilihfl
sehingga koinsiden dengan sudut azimuth seki tar transducer, maka dA Co()=
RC d:..) cr,
/2 d<p
s
dAT
Gambar 9. Daerah reverberasi efektif CSumber: Caruthers, 1977)
[image:38.505.52.462.318.607.2]T
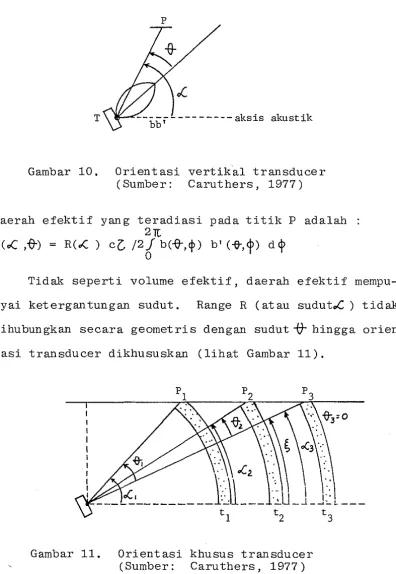
Gambar 10.
p
--- --- --- --- aksis akustik bb'
Orientasi vertikal transducer (Sumber: Caruthers, 1977)
Daerah efektif yang teradiasi pada titik P adalah
2n:
A(.( ;(T)
=
R(.( )cc,
/21 b(-"O-,(Pl b'
HM・MLセI@ 、セ@o
Tidak seperti volume efektif, daerah efektif mempu-nyai ketergantungan sudut. Range R (atau sudut.c) tidak dihubungkan secara geometris dengan sudut -{7- hingga orien-tasi transducer dikhususkan (lihat Gambar 11).
[image:39.508.60.457.75.649.2]Jika dimisalkan
0/
HセI@ = jb({t,t) b' HMサエLセI@ dr
sehinggao
A(
r£
;Q-)=
R(£) c6/24
(-{t), diperoleh nilai RLsRLs
=
SL - 40 log R + Ss + 10 log (RcE. /2) + 10 ャッァセ@ (.g.)セ@ (-9-) dapat pula dinyatakan sebagai:
th (-{t) = [b({t-S,O)b'
({t-Lo)]
セッ@
'1' cos-&
dimana セ@ adalah sudut ketinggian (elevasi) aksis
trans-ducer dan
-e-
<
300 (CARUTHERS, 1977) danセッ@
adalah: 21tセッ@
]セ@
(0)]Nj「HoLセI「GHoLTᄏ@
d<j>o
"
2.2.3 Reverberasi yang Termati di Laut
(1) Reverberasi Kolom
Sumber utama reverberasi kolom adalah deep
scatter-ing layer (DSL). Penghambur yang bertanggungjawab
terha-dap reverberasi ini bersifat biologis, namun makhluk yang
pasti membentuk DSL belum diidentifikasikan secara pasti.
Beberapa studi dengan menggunal{an jaring tarik (towed
net), fotografi, peralatan bawah-air, dan echo ranging
ha-nya memberikan satu hasil pasti; jumlah makhluk per kubik
meter yang bert an ggungj awab terhadap DSL kuat adalah
-3
セPLPU@ m . Studi mengemukakan bahwa organisme yang
ter-Ii bat adalah myctophids (l'l.n tern fish), siphonophores,
euphausids (makhluk yang menyerupai ud:mg), cumi-cumi dan
copepods (CARUTHERS, 1977).
(2) Reverberasi Permukaan Laut
Posisi transducer yang berada dekat permukaan kapal
permukaan laut pada suatu operasi sonar. Reverberasi da-ri pantulan dan hamburan sebenarnya yang terjadi pada tempat pertemuan udara dan laut ini sangat penting pada perambatan saluran permukaan (CARUTHERS, 1977).
CARUTHERS (1977) menyat akan bahwa penghamburan volu-me yang disebabkan gelembung-gelembung dekat permukaan terjadi sampai kedalaman satu kaki pada permukaan; dika-renakan begitu dekatnya dengan permukaan dan tak dapat dibedakannya dari penghamburan ke permukaan sebenarnya, selain dari interpretasi data terperinci, maka dianggap penghamburan tersebut sebagai bagian reverberasi
permuka-an.
(3) Reverberasi Permukaan Dasar Laut
Pada perairan dangkal, penghamburan dari dasar umum-nya merupakan penyumbang terkuat. Besarnya urutan nilai bagi reverberasi kolom, permukaan, dan dasar pada
perair-an dperair-angkal masing-masing adalah -80 dB, -40 dB, dperair-an -25 dB (CARUTHERS, 1977).
Reverberasi dasar tergantung pada tipe dan kekasaran dasar dan konturnya. Namun secara umum diyakini bahwa kontur memberikan pengaruh terbesar. Hal ini dikuatkan oleh kealpaan ketergantungan frekuensi kuat bagi frekuen-si di bawah 10 kHz. Penghamburan pada frekuensi di atas 10 kHz menunjukkan semaldn nyatanya pengaruh property da-sar laut (CARUTHERS, 1977). Dasar perairan yang agak
menunjukkan peningkatan scattering strength 3 dB per oktaf
peningkatan frekuensi, sedang batu dan pasir bercampur
batu dan dasar kulit kerang-kerangan nampaknya tidak
me-nunjukkan ketergantungan frekuensi, hingga
sekurang-kurangnya 60 kHz (CARUTHERS, 1977) •
.----. transducer
beam
daerah dimana deteksi dibatasi oleh reverberasi dasar
Gambar 12. Pendeteksi an dasar laut
(Sumber: Tucker, 1967)
Pada Gambar 12, di tunjukkan bagaimana reverberasi
da-sar membatasi range dari pendeteksian. Range yang
diba-tasi garis busur putus-putus ke atas dapat mendeteksi ikan
yang berada di dalamnya, jika echo cukup kuat dibandingkan
dengan noise latar belakang dari laut. Namun echo yang
berasal dari ikan pada daerah yang diarsir di luar garis
busur akan diterima secara bersamaan (simultan) dengan
penghamburan dari dasar laut. Besarnya penghamburan ini
berada lebih tinggi daripada peringkat echo ikan sehingga
Scanning Sonar adalah suatu alat deteksi yang
dipa-kai di perairan untuk mengumpull;:an data-data (informasi)
tentang objek-objek dan kejadian-kejadian di bawah air
dengan jalan memancarkan gelombang suara secara
horison-tal maupun vertikal dan mengobservasi gem a (echoes) yang
kembali (BURCZYNSKI, 1982).
Menurut TUCKER and WELSBY (1964), dan MARGETTS
(1969), jenis alat ini lebih maju dari
peralatan-peralat-an deteksi sebelurrmya. Perkembangan terakhir dari
per-alatan ini adalah dari segi "performance" yakni dengan
peningkatan "angular resolution" dan cara penggunaannya
sehingga memungkinkan pengukuran ketepatan pendeteksian
lebih tinggi dan penentuan lokasi kelompok ikan yang
ber-ada sangat dekat dengan dasar perairan.
3.1 Garis Besar Sistem ES 3
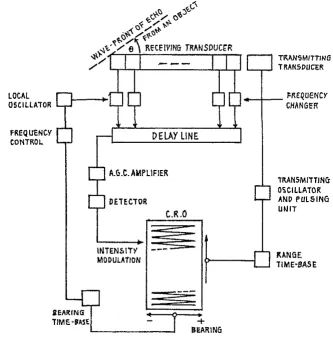
Diagram sistem secara skematik ditunjukkan pada
Gam-bar 13. Transducer penerima panjangnya n kali transducer
pemancar dan dibagi ke dalam n bagian, dimana n adalah
jumlah beamwidth (yang diukur antara dua titik dimana daya
respon berkurang menjadi setengahnya) yang diharapkan
ber-ada dalam scanned sector. Jika n bagian-bagian ini
dihu-bungkan ke n ruangan yang seragam, dan delay line dibuka
maka beam akan dibelokkan tergantung pada sejumlah
Jika echo yang diterima dari target dengan bearing relatif terhadap aksis tega};: lurus transducer, maka front gelombang dari pulsa echo terletak paralel pada garis yang diperlihatkan pada Gambar 13. Echo di terima oleh bagian transducer pertama sebelum mencapai transducer kedua, de-mikian selanjutnya sehingga sinyal echo yang diterima ke-dua (akhir) ditunda dalam fase relatif terhadap sinyal bagian pertama (sebelumnya).
LOCAL OSCILLA10R
FREQUCNCY CONTROL
Gambar 13.
DELAY LINE
A.G.C.AMPLIFIER
INTENSITY MODULATION
C.R.O
+ BEARING
T"mSMITTING
TRANSDUCER
_+-_FREQUENCY
CHANGER
TRANSMITTING
oセcillator@
AND PULSING UNIT
KANGE TIME-BASE
[image:44.505.98.431.249.594.2]Untuk mendapatkan output puncak pada sudut datang terten-tu, maka pada delay line disisipkan phase shift sehingga semua komponen dari output yang dikombinasikan berada pa-da fase yang sarna.
Dalam sistem scanning, peralatan peubah-frekuensi (frequency-changers) disisipkan antara bagian transducer dan delay line. Osilator lokal yang mensupplai
peubah-frekuensi disapu dalam peubah-frekuensi oleh bearing-time-base, sehingga frekuensi sinyal yang di terima oleh delay line beragarn pada kisaran setiap sapuan dari bearing-time-base. Jika kemudian delay line mempunyai pergeseran
fa-se yang beragam atas kisaran frekuensi dari nilai negatif 1,e nilai positif, beam akan menyapu dari kiri ke kanan pada setiap sapuan dari bearing-time-base. Bearing-time-base juga membelokkan titik pada CRT (cathode ray tube) dari kiri ke kanan sehingga sinyal yang diterima pada se-tiap bearing tertentu di rekarn pada display. Range-Time-Base bekerja dengan cara yang biasa, sehingga posisi titik echo pada tabung memberi indikasi posisi objek yang meng-hasilkan echo pada aksis segi empat panjang dari bearing dan range.
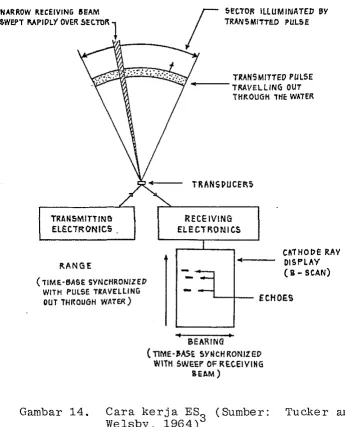
3.2 Cara Kerja ES 3
Pengoperasian scanning sonar dilakukan dengan cara radiasi suara terhadap suatu luasan sektor, misalnya 300 ,
lebar. Beam penerima dibuat dengan sudut yang sangat sempit, misalnya 10 , yang secara elektronik dengan cepat
dapat menyapu dari satu sisi ke sisi lain dari sektor (lihat Gambar 14).
HARROW RECEIVING SEAM
SWEPT IlAPIDlY OVER SECl1lR
1
&ECTOR ILLUMINATED BY
transmャョセッ@ PULSE
セMMM
TRAN5MITTINIl
ELEeiRONfCS ,
RANGE
(TIME·SASE SYNCHRONIZED
WiTH PULSE TRAVELLING
OUT THROU6H WATER)
_ _ _ UANSMITTED PULSE
- TRAVELLING OUT
THROUGH THE WATER
TRANSPUCERS
RECEIVIN/; ELECTRONICS
CAiHODE RAY
DISPLAY (II - SCAN)
'--+-
ECHOESSEARIN(l
(TIME·IIASE SYNCHRONIZED
WITH swセeイ@ OF RE.CEIVING
SEAM)
Gambar 14. Cara kerja ES
3 (Sumber: Tucker and Welsby, 1964)
[image:46.505.78.423.150.577.2]dipancarkan. Hal ini berarti bahwa dari segala arah yang berada dalam sektor sudah terambil contohnya (sampled)
se be lum pu lsa bergerak (sej auh p anj ang pulsa) me lalui air. Dengan kata lain, keseluruhan lebar sektor telah dideteksi secara simultan; dan pada saat pulsa mencapai range terjauh, informasi telah terkumpul dari segala pen-juru sektor.
3.3 Multiplicative Signal Processing (MSP)
Penggun aan MSP sebagi an membawa pengaruh at as ter-ciptanya resolusi tinggi ES
3 yang mampu membentuk beam yang sangat sempit dalam hubungannya dengan ukuran trans-ducer.
Pada Gambar 15, ditunjukkan dasar sistem pengolahan sinyal. Deret an transducer penerima dengan panj ang
f ,
dibagi dua, sehingga ruang antara pertengahan dua bagianadalah £/2. Setiap bagian dihubungkan secara terpisah dengan sirkuit elektronik yang akan menghasilkan
tegang-an output pada waktu ytegang-ang sesegera mungkin sebtegang-anding de-ngan penjumlahan dua tegade-ngan sekaligus.
Bila suatu gelombang sinyal tiba dengan arah sudut '!)- ,
pada multiplier di A adalah V cos
W t.
Pada B, gelombang yang diterima harus menjalani jarak ekstra CB yang sarna dengan (e
/2 sin.(7-) sehingga gelombang pada B tertunda dalam fase dengan sudut'(1
E=
n.f /
A
sin-e-.
Akustik si-nyal pada B adalah P cos (Wt-"it
E) dan dalam bentuk si-nyal listrik sebesar V cos (oot - it" E) .
direction of
arriving wave
wave-front
LOW-PASS FILTER
OR SMoarHER
lMMャ{]]^\セSセ]jイNᄋ[ZZZZセMmultipl@
IER•
LMi⦅セMイBMMNNNj@
t
OUTPUT SIGNAL
Garnbar 15. Sistem multiplicative signal processing (Sumber: Tucker, 1967)
(untuk besar gelombang akustik tetap) oleh karenanya
be-ragam sesuai
-e-
E' maksimum=
0,5 bila -Q-E=
0, dan mini-mum=
0 bila セe@=
セOR@ radian. Variasi-variasi ini mem-bentuk respon langsung dari sistem multiplicative.Dengan ES
3 , t ahap-tahap pengolahan sinyal secara
multiplicative terlihat seperti pada Gambar 16.
OELAY NETWORK
n/2 SECTIOUS nl2 SECTIONS
r-r-y-y----..,-, r - r - r - r - - - , - . mN6DUCER IN
L.,-t...,--'-;-'----'-;-' '-;--'-0'-;--'---'-;-' n Sf eTION S
DELAI LINE DELAY LINE
lqキᄋイaUセ@ fiLTER
TO AMrUFIERS
AND DISPLAY
fREQUENCY
CHANGtRS
Gambar 16. Tahap-tahap pengolahan sinyal secara
multiplicative (Sumber: Tucker, 1967)
Komponen delay line (setengah dari panjang yang
di-gunakan pada sistem non multiplicative) didi-gunakan untuk
menyapu pola arah (directional pattern) separuh bagian
transducer, sedang tambahan fase "delay network" telah
berada pada salah satu fase terdahulu dari bagian pola
[image:49.508.88.414.206.487.2]"Low-Pass-Filter", setelah multiplier, diperlengkapi
dengan "cut-off frequency" cukup tinggi untuk meloloskan
sinyal pulsa naik dan meluruh dengan cepat dalam
mempro-duksi bentuk pulsa, yang secara normalnya
sekurang-kurang-nya 20 kali frekuensi tertinggi yang dibutuhkan untuk
me-lewatkan pulsa.
Akhir dari pemaruhan beamwidth yang dihasilkan oleh
sistem multiplicative ini, mampu meningkatkan resolusi
sudut (angular resolution).
3.4 Signal-to-Noise Ratio (SNR) dan
Signal-to-Reverbera-tion Ratio (SRR) pada ES 3
Noise biasanya dihubungkan dengan bagian dari latar
belakang (background) yang tidak diinginkan terhadap echo
sinyal target yang mesti dideteksi, yang mana timbul
bu-kan dari transmisi sonar itu sendiri; reverberasi
ada-lah hambur-balik umum energi akustik dari pulsa yang
di-pancarkan. Signal-to-noise ratio (mengukur kesanggupan
deteksi dari echo sinyal) dapat ditingkatkan dengan cara
meningkatkan peringkat daya (power level) pancaran;
na-mun SRR (biasanya dominan mengukur kesanggupan deteksi
beam yang hampir horisontal pada perairan dangkal) エゥ、。ャセ@
dapat ditingkatkan dengan cara ini, karena sinyal dan
re-verberasi secara bersamaan bergantung pada peringkat daya
yang dipancarkan.
Pada ES
3, energi yang dipancarkan disebarkan ke
Sehingga peringkat daya atau intensitas akustik pada sem-barang range, hanya lin kali yang akan diterima jika se-kiranya daya telah dipusatkan dalarn suatu beamwidth sem-pi t sarna dengan beamwidth penerima seperti pada non-scanning sonar. Penerimaan peringkat noise tentunya t i -dak dipengaruhi oleh scanning(seti-dak-tidalmya pada sis-tem ideal), sehingga SNR berkurang sebesar 10 log n dB, dinyatakan sebagai ratio daya, berkurang n kali; jika dalam ratio tegangan sebesar
Vn
kali. Narnun rate pe-ngumpulan data (data rate) meningkat dengan ratio n, danini bukan saja merupakan kompensasi teoritis bagi ber-kurangnya SNR yang dapat disadari terlebih dahulu, juga
lebih dapat ditafsirkan. dan digrafikkan pada display. Pada SRR, dapat dilihat bahwa tidak ada perubahan peringkat daya per beamwidth mempengaruhi sinyal dan re-verberasi secara sarna. Kenyataan bahwa SNR berkurang de-ngan adanya scanning dapat diartikan bahwa SRR mungkin merupakan faktor dominan pada non-scanning sonar sebab peringkat noise berada di bawah peringkat reverberasi. Peringkat noise dapat melampaui peringkat reverberasi se-hingga SRR tidak lagi menjadi fal,tor dominan. Dalarn
4.1 Pengaruh Reverberasi Terhadap Ketepat an Pendeteksian
Pada survai akustik, kesalahan dapat timbul
disebab-kan variasi tingkah laku idisebab-kan, pola migrasi dan keadaan
alamo Keragaman tingkah laku memberikan pengaruh sangat
nyata pada pendugaan populasi ikan dengan met ode akustik
(MITSON, 1982; KJELL et al., 1982; VILHJ ALMSSON, 1982).
Walaupun sulit mengumpulkan informasi yang penting
ten-tang tingkah laku ikan, namun OLSEN et al. (1982)
berke-yakinan bahwa perbaikan pendugaan kelimpahan dengan
me-tode akustik akan sulit terlaksana tanpa bantuan in
for-masi ini.
Sewaktu ikan berada terlalu dekat dengan permukaan,
sulit dilakukan deteksi secara akustik (antara lain
kare-na adanya reverberasi). Sebagian reverberasi ini
menu-tupi sinyal akustik sehingga menyulitkan, kadang tidak
memungkinkan penerimaan sinyal.
Penutupan sinyal ini terjadi jika besarnya
penerima-an sinyal echo lebih kecil daripada peringkat reverberasi
pada waktu dan j arak tertentu. Sinyal reverberasi akan
diterima jika saat tiba reverberasi telah berada di bawah
peringkat sinyal echo.
Perlu diingat bahwa intensitas sinyal pantulan
ada-lah berbanding langsung dengan daya yang dipancarkan.
sehingga reverberasi tidak dapat dikurangi dengan pening-katan daya. Penurunan pemancaran daya akan mengurangi peringkat reverberasi, konsekuensinya, terjadi
pengurang-an rpengurang-ange dalam mendeteksi kelompok atau individu ikpengurang-an. Sehingga variasi daya yang dipancarkan tidak dapat mere-duksi peringkat reverberasi relatif terhadap sinyal echo ikan .
Untuk mengatasi kesulitan yang ditimbulkan akibat reverberasi, maka perlu diketahui beberapa parameter fi-sik yang dapat mengontrol secara tidal, langsung perilaku reverberasi. Parameter tersebut antara lain: pulse dura-tion, {, , yang menentukan seberapa dekat. sistem dengan batas dasar laut agar efektif, dan geometri beam yang me-ngontrol volume sampel per radiasi (oleh KALIKHMAN and TESLES, (1982) parameter ini dimaksudkan sebagai efektif beam akustik yakni solid angle dan volume yang berada
da-lam sudut ini).
Pada pendeteksian dekat dasar perairan, pengaruh geometri beam dapat digambarkan dengan memperhatikan luas
Indefinite Dead Zone (IDZ)
Definite Dead Zone
(DDZ)
c G/2
Gambar 17. Dead zone yang terbagi atas dua bagian (Sumber: Mitson, 1982)
Luasnya volume dead zone ini, dengan menganggap beam ber-bentuk kerucut, dapat dinyatakan sebagai berikut:
Volume dead zone
=
Volume frustrum - Volume cap V frustrum=
1t /3I(
d-c 1:. /2)( 1-cos.fT
/2 )+cセ@
/2][(2d tan
セORIRKHRH、Mc@
(, /2) tan .1;]-/2)2 +(2d tan f) /2)(2(d-cG /2) tanV/2)]
V
=
11:/3 [(d-cG/2)(1-COS1r/2)]2[3(d-C(,/2) cap(d-c
C.
/2) (l-cos-e-
/2)] [image:54.507.69.429.66.286.2]Penggunaan wide beam, misalnya 30°, dan narrow beam, 1°, dan pada kedalaman perairan 100 meter, c sebesar
1500 meter/detik, dan c" 1,0 mdetik, pada luas liputan area yang sarna akan menghasilkan dead zone masing-masing
3 3
sebesar 8959,45 m dan 2115,15 m
transducer
r セ@ ...
ith
-IT;'
セ@
...
セセ@ -&7z セィ@セ@ z
セ@
j.J
I'
Zr-
Io-II
/\
/1
1\
d/
\\
QOセセイMM
_vvf\
[lr-
---
1--- - -----
--C¥2
1\
' , : ' , ' ,', :. ",', : " : '.' ... 1,,' ••• ', セ@ ::..-:.'" .:. ',.:.:.'," ".". ", "': -: : :',:.: ,": :' ... ,' ... セ@ : ••••• :,.:"::.,,.::,-••• セN@ セNZ@ .. : •. : : •• ;.-: .••• :':. A:.
[image:55.505.99.459.176.549.2]4.2 Pengaruh Narrow Beam Terhadap Reverberasi
Salah satu pembatas utama dalam pendeteksian kelom-pok ikan adalah reverberasi. Efektif target strength beamwidth yang lebih tinggi ketimbang target strength ikan mampu menghilangkan echo ikan pada daerah dimana ikan dan dasar berada pada selang range yang sarna. Ke-mungkinan yang dapat dilakukan adalah penggunaan beam yang demikian sempit, sehingga efektif target strength dasar lebih kecil dari ikan.
Reverberasi mungkin saja tidak terdiri dari penjum-lahan acak dari echo-echo yang sangat kecil seperti yang berasal dari butir-butir pasir atau kerikil, namun dapat berasal dari satu atau dua echo dominan dari batu besar
atau ridge kecil. Dalam hal ini, pantulan atau hamburan balik tidak hanya merupakan suatu daerah berbutir-butir terhadap titik tunggal echo-echo ikan melainkan mungkin terdiri dari sejumlah echo titik tunggal dari batu-batu besar yang al,an dapat dibedakan dari echo ikan. Sehingga pen ggun aan narrow beam dapat diharapkan berfungsi dengan baik dalam pendeteksian ikan demersal.
Pada sistem ES
3 , narrow beam akan berfungsi lebih baik lagi dengan di gun al, ann ya teknik scanning yang sangat
Penggunaan narrow beam selain akan mempertajam atau meningkatkan resolusi, juga akan meningkatkan ratio ikan terhadap latar belakang reverberasi dasar atau permull:aan membentuk latar belakang pada range yang sama. Latar
Telah diuraikan dengan cukup terperinci tentang kon-sep-konsep pendugaan, teori reverberasi, dan ES
3 dengan narrow beam receivernya, serta pengaruhnya satu sarna lain. Konsep-konsep dasar pendugaan yang berisi persamaan dan met ode-met ode pengukuran sistem akustik perlu diketahui sebelum melakukan survai akustik. Uraian tentang rever-berasi menyadarkan kita al,an hal-hal yang perlu menjadi perhatian sewal{tu akan melal{sanal{an survai akustik. Dan ES
3 menggambarkan apa dan bagaimana peralatan ini mende-teksi kelompok atau individu ikan.
Dari hasil uraian-uraian terse but , penulis berpenda-pat ada beberapa hal yang berpenda-patut dikemukakan sebagai al,hir dari penutup tulis.an ini.
Bahwa reverberasi akan selalu menjadi faktor pemba-tas dalam suatu pendeteksian atau pendugaan kelimpahan stok ikan. Hal ini dikarenakan tidak dimungkinkannya menghilangkan seluruh pengaruh reverberasi. Kita hanya dapat berusaha menguranginya ke peringkat yang lebih ren-dah seperti penggunaan narrow beam.
Penggunaan narrow beam akan mereduksi reverberasi ke peringkat yang lebih rendah. Dengan narrow beam, ra-tio ikan terhadap rara-tio latar belakang yang timbul dari volume reverberasi berada pada peringkat yang sangat ren-dah.
Cukup beralasan kiranya untuk bersikap optimis men-dapatkan hasil dugaan yang mendekati nilai sebenarnya,
jika ES
AZHAZHA, V. G. and SHISHKOVA, E. V. 1967. Fish lication by hydroacoustic devices. Israel Program for s」ゥ・ョセ@
tific Translation Ltd. Jerussalem. 114p.
BURCZYNSKI, J. systems for
Pap. (191)
1982. Introduction to the
estimating fish biomass. Rev. 1:89p.
use of sonar FAO fish. Tech.
CARUTHERS, J. W. 1977. Fundamental of
Elsevier oceanography series: 18. fic Publishing Company, New York.
marine acoustics. Elsevier
Scienti-CLAY, C. S. and MEDWIN, H. 1977. Acoustical oceanography:
principles and application. A Wiley-Inter Science,
John Wiley and Son, New York. 366p.
CSIRO. 1980. Report 123. p.33. In Castle, M. J. (ed.). Proceeding of the AustralasiMWorkshop on the Use
of Underwater Acoustic in Biological Oceanography. Australia Div. Fish. Oceanography.
CUSHING, D. 1973. The detection of fish. Pergamon Press, Oxford.
1979. Fisheries resources of the sea and their management. ELBS edition 1st published, Oxford University Press, Oxford.
GRIFFTHS, W. R., et al. (ed.). 1973. Signal processing.
Proceeding ッセaセato@ advance study institute on
sig-nal processing with particular reference to
under-water acoustic. Academic Press.
JOHANNESSON, K. A. and MEDWIN, H. tic. A practical manual for tion. FAO Fish. Tech. Pap.
1983. Fisheries
acous-aquatic biomass estima-(240) :249p.
KJELL, O. et al. 1982. Observed fish reaction to a sur-veying vessel with special reference to herring, cod, and capelin and polar cod. p.131-138. In NAKKEN, O. and VENEMA, S. C., (ed). Symposium on fisheries acoustic. Selected papers of the ICES/FAO Symposium on fisheries acoustic.
LAO, T. R. 1983. Sonar: An overview of application. p. 18-19. Fisheries Today, vol. V no 1 June 1983.
MARGETT, A. R. 1972. Sector scanning sonar
serving deep-sea trawling. p.137-140.
SON (ed). Fishing Gear of the World 3. News (Books) Ltd. London.
used for ob-In KRISTJON-Fishing
11ATHISEN, O. A., et al. 1982. Hydroacoustic indices as input to dynamiC-management system of fish stock. p.223-231. In NAKKEN, O. and VENEMA, S. C. (ed).
Symposium ッョセゥウィ・イゥ・ウ@ acoustic. Selected papers of
the ICES/FAO Symposium on fisheries acoustic.
MITSON, R. B. 1982. Acoustic detection and estimation of fish near the sea-bed and surface. p.27-34. In
NAKKEN, O. and VENEMA, S. C. (ed). Symposium on fisheries acoustic. Selected papers of the ICES/FAO Symposium of fisheries acoustic.
NARROWI. 1981. Suatu studi tentang pengkajian stok ikan
dan penyebarannya dengan menggunakan echo-integrator (kasus perairan Selat Makassar dan Laut Sulawesi). Fakultas Perikanan, Institut Pertanian Bogor, Bogor. (t idak dipublikasikan)
NISHIMURA, et al. 1967. Development of echo counting for estimating fish stock in Japan. p.99-103. In KRISTJONSON (ed). Fishing Gear of the World 3. Fish-ing News (Books) Ltd. London.
PASARIBU, B. P. 1982. Study
strength of fish model. School of Marine Science versity, Japan.
on the acoustic target Dissertation, Graduate
and Technology, Tokio
Uni-SAETERSDAL, G. et al. 1982. Some observation of
frequen-cy dependent backscattering strength. p.150-156. In
NAKKEN, O. and VENEMA, S. C. (ed). Symposium on fish-eries acoustic. Selected papers of the ICES/FAO Sym-posium on fisheries acoustic.
sumAD.
1968. Measuring target strength andbackscatter-ing strength. SIMRAD Bulletin no. 5. Simonsen
&
Mustad A. S. Norway.STEPNOWSKI, A. and BURCZYNSKI, J. 1981. The analysis of the calibration constant in the hydroacoustic system of fish abundance estimation. In SUOMALA, J. B.
TUCKER, G. D. 1967. Sonar in fisheries a forward lock. Fishing News (Books) Ltd. London. 136p.
TUCKER, G. D. and WE LSBY , V. G. 1964. Sector scanning
sonar for fisheries purpose. p.367-370. In
KRIS-TJONSON (ed). Fishing Gear of the World 2-.- Fishing News (Books) Ltd., London.
SUHENDAR, I. S. 1983. Suatu studi tentang aplikasi echo-integrator dalam eksplorasi dan estimasi stok ikan di perairan Kepulauan Anambas dan Kepulauan Natuna-Laut Cina Selatan. Fakultas Perikanan, Institut Per-tanian Bogar, Bogor. (tidal, dipublikasikan).
SUOMALA, J. B. and LOZOW, J. B. 1981. Hydroacoustics in fisheries biomass estimation. p. 9-22. In SU01IALA, J. B. (ed). Meeting on hydroacoustical methods for the estimation of marine fish population II: cons-tributed papers, discussion and comment. The Char-les Stark Draper Lab., Inc. Cambridge, Mass. USA.
VILHJALMSSON, H. 1982. Acoustic abundance estimation of
the Icelandic stock of capelin 1978-1982. p.208-216. In NAKKEN, O. and VENEMA, S. C. (ed). Symposium on fisheries acoustic. Selected papers of the ICES/FAO Symposium on fisheries acoustic.
VILLANUVEA, R. 1966. The Peruvian eureka programme of rapid acoustic survey. p. 20-25. In KRIST JONSON (ed). Fishing Gear of the World 3. Fishing News (Books)
Ltd. London.
VINCENTIUS, P. S. 1980. Suatu pendugaan stok ikan
pe-lagis di perairan Jawa Barat bagian selatan dan di
perairan Selat Bali. Fakultas Perikanan, Institut
Pertanian Bogar. (tidak dipublikasikan).
VOROBYOV, et al. 1981. Calibration of hydroacoustic fish
searchinginstrument. Determination of the constant
Co. In SUOMALA, J. B. (ed). Meeting on hydroacous-tical-methods for the estimation of marine fish popu-lation II: contributed papers, discussion and comment. The cィセイQSウ@ Stark Draper Lab., Inc., Cambridge, Mass. USA.
YUDANOV, K. I. and KALIKHMAN, I. L. 1982. Sound scatter-ing by marine animal. In SUOMALA, J. B. (ed). Meet-ing on hydroacoustical .methods for the estimation of marine fish population II: contributed papers,
Penulis dilahirkan di Palopo (Sulawesi Selatan),
pa-da tanggal 10 April 1961 pa-dari ayah bernama A. Muis Ismail
dan ibu Sinar.
Di kota Ujungpandang penulis menyelesaikan
pendidik-an dasar di Selwlah Dasar Negeri 23 pada tahun 1972,
kolah Menengah Pertama Negeri I pada tahun 1975, dan
Se-kolah Menengah At as Negeri II pada t ahun 1979.
Pada tahun 1979 - 1980 atas beasiswa AFS
Internatio-nal Intercultural Programs, penulis mengikuti "student
exchange programme" ke Amerika Serikat.
Penulis mulai belajar di Institut Pertanian Bogor
tahun 1980 dan kemudian memilih Falmltas Perikanan
Jurus-an PemJurus-anfaatJurus-an Sumberdaya PerikJurus-anJurus-an. Penulis dinyatakan
lulus dari Fakultas Perikanan IPB dalam sidang ujian
Lampiran 1. Daftar Istilah
- absorption loss: hilangnya daya gelombang akustik aki-bat pengaruh temperatur dan frekuensi (Satuan: dB). - acoustic equation (persamaan akustik): persamaan yang
dapat menggambarkan penampilan dari suatu sistem akustik (sistem sonar).
- ambient noise: suara-suara yang ditimbulkan oleh ge-lombang laut dan hewan-hewan akuatik.
- amplifier: alat yang meningkatkan ukuran (besar) sinyal. - amplitude: ulmran (besarnya) sinyal.
- angular resolution: besarnya sudut yang memisahkan
an-tara dua target (satuan: deraj at).
- attenuation: reduksi daya akustik yang disebabkan oleh sperical spreading dan absorpsi gelombang (satuan: dB /km).
- backscattering (penghamburbalikkan): besarnya daya akustik yang dihamburkan (scattered) oleh target ke arah transducer pemancar.
- backscattering layer: lapisan biomass yan