ABSTRACT
A DESIGN OF AUTOMATIC DRIVER FOR SOLAR CELL PANEL BY USING PHOTODIODE SENSOR BASED ON ATMEGA 16
MICROCONTROLLER By
YUDHY WIRANATHA JAYA KUSUMA
Solar energy can be used by means of solar cell panels. This solar cell panel is able to change solar energy into electricity. The bigger sun rays intensities received by surface of solar cell panel, the bigger the electric energy will be obtained.
However, current application of solar cell panel is still located to a certain single direction, and this causes the process of solar energy receiving only occurs when the location of the sun is located precisely where the solar cell panel is directed. To maximize the use of this solar cell panel, a system that is able to receive the solar energy fully by continuously following the sunrays directions is made. This system uses seven sensors of photodiodes where each photodiode is directed into the following angles: 30°, 50°, 70°, 90°, 110°, 130°, and 150°. Total energy produced by the solar cell panel is 70,45 Wh. 40,976 Wh of total energy is used for supplying operating system and only 29,474 is free and usable.
The test results shows that this automated system is only able to operate in one day with a full charged battery, so this system needs to be developed further to optimally absorb solar energy.
ABSTRAK
RANCANG BANGUN PENGGERAK OTOMATIS PANEL
SURYA MENGGUNAKAN SENSOR PHOTODIODA
BERBASIS MIKROKONTROLLER ATMEGA 16.
Oleh
YUDHY WIRANATHA JAYA KUSUMA
Pemanfaatan energi matahari dapat dilakukan salah satunya dengan menggunakan panel surya. Panel surya mampu mengubah energi matahari menjadi energi listrik, semakin besar cahaya yang mengenai permukaan dari panel surya maka energi listrik yang didapat akan semakin besar.
Namun pada saat ini kebanyakan dari pemasangan panel surya masih diletakkan hanya menghadap ke satu arah, ini mengakibatkan proses penyerapan energi yang dilakukan oleh panel surya hanya berlangsung saat matahari tepat berada di posisi panel surya diletakkan. Agar pemanfaatan dari panel surya dapat dimaksimalkan, maka dibuatlah sebuah sistem yang mampu untuk mendapatkan energi matahari secara penuh, yaitu dengan membuat panel surya dapat terus menghadap kearah matahari. Sistem ini meggunakan tujuh buah sensor photodioda yang masing-masing dihadapkan pada posisi derajat matahari, yaitu pada sudut 30°, 50°, 70°, 90°, 110°, 130°, 150°. Energi yang dihasilkan oleh panel surya 70,45 Wh, untuk pengoperasian sistem otomatis sebesar 40,976 Wh, dan 29,474 dimanfaatkan untuk beban.
Dari hasil pengujian yang dilakukan tersebut, sistem otomatis ini hanya mampu beroperasi dalam waktu satu hari dan pada keadaan baterai (aki) terisi penuh, sehingga optimasi yang dilakukan ini perlu dikembangkan lagi untuk mendapatkan hasil penyerapan energi yang lebih optimal.
RANCANG BANGUN PENGGERAK OTOMATIS PANEL
SURYA MENGGUNAKAN SENSOR PHOTODIODA
BERBASIS MIKROKONTROLLER ATMEGA 16.
Oleh
YUDHY WIRANATHA JAYA KUSUMA
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar SARJANA TEKNIK
Pada
Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK UNIVERSITAS LAMPUNG
RIWAYAT HIDUP
Penulis adalah anak kedua dari empat bersaudara yang dilahirkan dari pasangan Bapak Tajudin (alm) dan Ibu Sri Karmila. Penulis dilahirkan di Bengkulu pada tanggal 16 Agustus 1991.
Pendidikan formal penulis dimulai di SD Negeri 1 Sukarame pada tahun 1996 dan lulus pada tahun 2002. Penulis kemudian melanjutkan pendidikan menengah pertama pada SMP Negeri 24 Bandar Lampung dan pendidikan menegah akhir di SMA Negeri 12 Bandar Lampung.
Pada bulan September tahun 2011, penulis melaksanakan kerja praktik di PLTA Batu Tegi pada bagian operasi dan pemeliharaan (Har.Listrik). Pada saat kerja praktik penulis membuat laporan tentang Analisa Pembangkitan Daya pada Generator Unit 1 Pada PLTA Batu Tegi.
moto
“bARANG SIAPA YANG mENGHENDAKI KEbAIKAN DI DUNIA mAKA DENGAN ILmU. bARANG SIAPA YANG mENGHENDAKI KEbAIKAN DI AKHIRAt mAKA DENGAN ILmU. bARANG SIAPA YANG mENGHENDAKI
KEDUANYA mAKA DENGAN ILmU”
(HR. bUKHoRI DAN mUSLIm)
“PELAjARILAH ILmU UNtUK KEtENtRAmAN DAN KELEmbUtAN jIwA, tUNDUK DAN RENDAHKAN DIRImU KEPADA YANG mENGAjARImU”
(UmAR bIN KHAttAb)
“jANGAN mEmbIcARAKAN APA YANG tIDAK ENGKAU KEtAHUI. jANGAN bERtANGGAPAN DAN mEmbERI PENDAPAt AtAS APA YANG KAU tIDAK bERADA DALAm KEDUDUKAN UNtUK mEmbERI PENDAPAt
tENtANGNYA. bERHENtILAH jIKA KHAwAtIR AKAN tERSESAt. ADALAH LEbIH bAIK bERHENtI DISAAt KEbINGUNGAN DARIPADA mAjU mEREDAH bAHAYA-bAHAYA YANG tAK tENtU DAN
RISIKo-RISIKo YANG tAK tERDUGA”
(ALI bIN AbI tHALIb)
SELALU ADA PRoSES DALAm SEtIAP LANGKAH KEHIDUPAN, NIKmAtI PRoSES mENUjU KEbAIKAN, SEHINGGA mENGERtI ARtI DARI
“Dia memberikan hikmah (ilmu yang berguna) kepada siapa yang dikehendaki-Nya. Barang siapa yang mendapat hikmah itu
Sesungguhnya ia telah mendapat kebajikan yang banyak. Dan tiadalah yang menerima peringatan
melainkan orang- orang yang berakal”. (Q.S. Al-Baqarah: 269)
SegalapujibagiMuTuhansemestaalampemiliksegalaapayangadadilangitdanbumi,dan menjadikanMuhammadS₅Wsebagairahmatbagiseluruhalam,memberikancahayabagi
seluruhkehidupanmelaluikekasihNyayangbergelarpenghuluparanabidanrasul.
“Akhirnya aku sampai ketitik ini….”
Hanya ucapan puji syukur yang mampu aku ucapkan kepada ALLAH SWT, yang telah memberikan kesempatan kepadaku untuk menyelesaikan masa studi di jurusan teknik
elektro unila tercinta...
Kemudian terima kasih yang tak terhingga untuk ibuku tersayang yang selalu memberikan doa, dukungan, semangat, dan motivasi kepadaku, semoga karya kecilku ini dapat mengobati beban mu walau
SANWACANA
Assalammu’alaikum Wr . Wb
Puji syukur penulis panjatkan kepada Sang pemilik alam ini yaitu Allah SWT, karena berkat rahmat dan berkah-Nya sehingga penulis dapat menyelesaikan skripsi ini. Sholawat serta salam senantiasa tercurah kepada Nabi Muhammad SAW sang penutup Nabi dan Rasul, kepada keluarga, sahabat dan pengikutnya yang senantiasa setia sampai akhir zaman.
Skripsi yang berjudul “ RANCANG BANGUN PENGGERAK OTOMATIS PANEL SURYA MENGGUNAKAN SENSOR PHOTODIODA BERBASIS MIKROKONTROLLER ATMEGA 16. “ sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik pada Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung.
Selama proses pengerjaan skripsi ini, tak lupa penulis sampaikan penghargaan dan rasa terima kasih kepada semua pihak yang telah membantu penulis dalam menyelesaikan skripsi dan menyusun laporan ini sehingga dapat terselesaikan dengan baik dan tepat waktu, khususnya kepada :
2. Bapak Agus Trisanto, Ph.D. selaku ketua jurusan Teknik Elektro Universitas Lampung sekaligus sebagai Dosen Pembimbing Pendamping Tugas Akhir.
3. Bapak Ir. Noer Soedjarwanto, M.T. selaku Dosen Pembimbing Utama Tugas Akhir.
4. Ibu Dr. Eng. Dikpride Despa, M.T.selaku Dosen Penguji Tugas Akhir.
5. Bapak serta Ibu dosen Jurusan Teknik Elektro atas didikkan, bimbingan, serta ilmu pengetahuan yang telah diberikan.
6. Mbak Ning dan jajaran staf administrasi Jurusan Teknik Elektro Unila.
7. Ibunda Sri Karmila dan Ayahanda Tajudin (alm), yang senantiasa memberikan doa, serta dukungannya.
8. Saudara-saudaraku tersayang, ayuk Putri Della Karneta, Muhammad Mustopa, dan Adek Zamu Haradin Tajira, yang selalu memberikan dukungan dalam menjalani hidup baik secara materi, moral, maupun spiritual.
9. Keluarga besar penulis yang tidak dapat disebutkan satu per satu, atas do’a, kasih dan sayangnya kepada penulis.
10. Kawan-kawan pelangi, Giri Woryanto, Bambang Tri Atmojo, Rahmatullah, Tuntas Erdeka, M..Ridho, Rizky Wiguna, Aferdi Siswa, Nora Adityan, Aris Susilo, Marwanto, Fegi Irvan , Ade Wahyu, Arif Wicaksono, Sigit Barazili, Indra Aditama, Ahmad Khumaedi, Taufik Munandar, Kholil Arifudin, Eko Warsiyanto, Mip Deka, dan Zainal Abidin, yang telah bertahan atas kerepotan dan rasa sakit yang saya timbulkan selama menjalani perkuliahan.
Insan, Reza, Pujo, Aries, dll) atas kebersamaan dalam canda dan tawa dalam mengisi malam-malam di Lab.
12.Mutiara-mutiara kebanggaan Teknik Elektro Unila 2008, Anisa, Ayu, Barokatun, Novia, Palupi, Prativi, Rita, Yuly.
13.Teman-teman Jurusan Teknik Elektro angkatan 2008.
14.Kakak dan adik tingkat Jurusan teknik Elektro yang begitu luar biasa.
15.Semua pihak yang karena kealpaan penulis sehingga tidak dapat penulis sebutkan namanya disini, sekali lagi, terima kasih atas semua bantuan yang telah diberikan. Mudah-mudahan itu semua menjadi amal kebaikan saudara.
Penulis menyadari bahwa skripsi ini tidak terlepas dari kesalahan dan jauh dari kesempurnaan, oleh karena itu masukan serta saran dan kritik yang membangun sangat penulis harapkan demi perbaikan dimasa yang akan datang. Akhirnya, semoga skripsi ini dapat berguna dan bermanfaat bagi kita semua.
Wassalamu’alaikum Wr. Wb.
Bandar lampung, 26 September 2014
Penulis
DAFTAR ISI
halaman
LEMBAR JUDUL ... i
ABSTRAK ... ii
ABSTRACT ... iii
LEMBAR PERSETUJUAN... iv
II. TINJUAN PUSTAKA
2.1 Sejarah Panel Surya ... 6
2.1.1 Modul panel Surya ... 7
2.1.2 Prinsip Kerja Sel Surya Photovoltaik ... 8
2.2 Mikrokontroller ... 9
2.2.1 Arsitektur ATMega 16 ... 10
2.2.2 Konfigurasi Pin ATMega 16 ... 12
2.2.3 Deskripsi Mikrokontroller ... 12
2.2.4 Peta memori ATMega 16 ... 14
2.2.5 Perangkat Lunak Mikrokontroller ATmega 16... 15
2.3 Motor Servo ... 18
2.4 Sensor Cahaya ... 22
2.4.1 Light Dependent Resistor ... 22
2.4.2 Photodioda ... 23
2.4.3 Photo Transistor ... 24
III.METODE PENELITIAN 3.1 Waktu dan Tempat Penelitian ... 25
3.2 Alat dan Bahan ... 25
3.3 Tahap – Tahap Dalam Perancangan Tugas Akhir ... 26
a. Diagram alir penelitian ... 28
3.4 Spesifikasi Alat ... 31
3.5 Metode Penelitian ... 33
IV. HASIL DAN PEMBAHASAN 4.1 Perangkat Keras dan Pengujian ... 38
4.1.1Spesifikasi Perangkat Keras ... 38
4.1.2 Rangkaian Sensor Photodioda ... 38
4.1.3 Rangkaian Minimum Mikrokontroller ... 41
4.1.4 Rangkaian Regulator Tegangan ... 42
4.1.5 Rangkaian Alat Keseluruhan ... 43
4.1.6 Pengujian Sensor Photodioda ... 45
4.1.7 Pengujian Motor Servo ... 48
4.1.8 Pengujian Alat Secara Keseluruhan ... 53
4.2 Pemrograman Mikrokontroller ... 62
V. KESIMPULAN DAN SARAN A.Kesimpulan ... 64
B.Saran ... 65
VAFTAR TABEL
Tabel Halaman
3.1 Penentuan waktu menurut sudut ... 36
4.1 Nilai arus, tegangan, dan daya sistem penggerak otomatis ... 55
4.2 Daya Rata- Rata Penyerapan Panel Surya Setiap Sudut ... 59
I. PENDAHULUAN
A. Latar Belakang
Kebutuhan akan energi yang terus meningkat dan semakin menipisnya cadangan
minyak bumi memaksa manusia untuk mencari sumber-sumber energi alternatif.
Negara-negara maju juga telah bersaing dan berlomba membuat
terobosan-terobosan baru untuk mencari dan menggali serta menciptakan teknologi baru
yang dapat menggantikan minyak bumi sebagai sumber energi. Semakin
menipisnya persediaan energi dan juga ketergantungan pada salah satu jenis
energi dimana hingga saat ini pemakaian bahan bakar minyak sangat besar sekali
dan hampir semua sektor kehidupan menggunakan bahan bakar ini, sementara itu
bahan bakar minyak merupakan komoditi ekspor yang dominan untuk pendapatan
negara.
Dalam upaya pencarian sumber energi baru sebaiknya memenuhi syarat yaitu
menghasilkan jumlah energi yang cukup besar, biaya ekonomis dan tidak
berdampak negatif terhadap lingkungan. Oleh karena itu pencarian tersebut
diarahkan pada pemanfaatan energi matahari baik secara langsung maupun tidak
langsung dengan menggunakan sel surya yang dapat merubah energi matahari
menjadi energi listrik yang dinamakan solar cell. Solar cell merupakan suatu
panel yang terdiri dari beberapa sel dan beragam jenis. Penggunaan solar cell ini
2
pemanfaatannya tidak hanya pada lingkup kecil tetapi sudah banyak digunakan
untuk keperluan industri sehingga energi matahari dapat dijadikan sebagai sumber
energi alternatif. Energi matahari mempunyai banyak keuntungan dibandingkan
dengan energi lain. Keuntungan yang dapat diperoleh adalah jumlahnya cukup
besar, kontinyu, tidak menimbulkan polusi, terdapat dimana-mana dan tidak
mengeluarkan biaya. Untuk mendapatkan energi listrik yang optimal, sistem panel
surya tersebut masih harus dilengkapi pula dengan suatu sistem control yang
berfungsi untuk mengatur arah permukaan dari panel surya agar selalu menghadap
matahari sehingga energi dari sinar matahari dapat sepenuhnya jatuh ke
permukaan panel surya.
B. Tujuan Penelitian
Tujuan dari penulisan tugas akhir ini adalah untuk merancang suatu alat yang
mampu mengatur posisi dari panel surya agar selalu mengarah kepada cahaya
matahari.
C. Manfaat Penelitian
Manfaat yang dapat diambil dari penelitian ini adalah :
Mampu mengoptimalkan kinerja dari panel surya dengan sistem otomatis
3
D. Batasan Masalah
Beberapa hal yang jadi batasan masalah dalam pembahasan tugas akhir ini :
1. Hanya membahas daya operasi sistem penggerak otomatis, dan daya hasil
penyerapan panel surya menggunakan sistem penggerak otomatis.
2. Mikrokontroller yang digunakan adalah ATMega 16.
3. Pengendali otomatis yang digunakan hanya bergerak dalam satu axis.
E. Rumusan Masalah
Rumusan masalah pada penelitian ini adalah sebagai berikut :
1. Bagaimana menganalisa daya, dan berat beban yang mampu
digunakan pada motor servo.
2. Bagaimana merancang sebuah sistem kontrol yang digunakan pada
penggerak panel surya menggunakan mikrokontroller ATMega 16.
3. Bagaimana mengaplikasikan photodioda sebagai sensor cahaya.
F. Hipotesis
Photodioda merupakan salah satu jenis sensor yang mampu mengubah
cahaya menjadi arus listrik, dengan kemampuan tersebut maka dapat
digunakan sebagai sensor yang mampu membaca intensitas cahaya matahari.
Sehingga dapat digunakan pada aplikasi penggerak panel surya otomatis
menggunakan sistem kendali mikrokontroller ATMega 16, dengan
4
G. Sistematika Penulisan
Penulisan tugas akhir ini disusun secara sistematis dengan urutan sebagai berikut:
BAB I PENDAHULUAN
Menjelaskan tugas akhir secara umum, berisi latar belakang, tujuan, mamfaat
penelitian, batasan masalah, perumusan masalah, hipotesis dan sistematika
penulisan.
BAB II TINJAUAN PUSTAKA
Pada bab ini menjelaskan secara umum tentang teori dasar yang behubungan
dengan peralatan yang akan dibuat, Serta hal-hal yang berhubungan dengan
aplikasi alat
BAB III METODE PENELITIAN
Dimana berisi tentang langkah-langkah yang akan dilakukan dalam penelitian,
Diantaranya waktu dan tempat penelitian, Alat dan bahan, Komponen dan
perangkat penelitian, Prosedur kerja dan perancangan serta Metode penelitian.
BAB IV HASIL DAN PEMBAHASAN
Bagian yang berisi hasil dari pengujian dan menganalisis kerja alat.
BAB V KESIMPULAN DAN SARAN
Berisi tentang satu kesimpulan yang diperoleh dari pembuatan dan pengujian,
5
DAFTAR PUSTAKA
II. TINJAUAN PUSTAKA
2.1Sejarah Panel Surya
Efek photovoltaik pertama kali diperkenalkan pada tahun 1839 oleh
fisikawan Perancis Alexandre-Edmond Becquerel. Dia bereksperimen menggunakan sel larutan elektrolisis yang dibuat dari dua elektroda. Kemudian Becquerel menemukan bahwa beberapa material jenis tertentu
memproduksi arus listrik dalam jumlah kecil ketika terkena cahaya. Akan tetapi, sel surya yang pertama dibuat baru pada tahun 1883 oleh Charles
Fritts, yang melingkupi semikonduktor selenium dengan sebuah lapisan emas yang sangat tipis untuk membentuk sambungan-sambungan. Alat tersebut hanya memiliki efisiensi 1%. Pada tahun 1941,seorang peneliti
bernama Russel Ohl berhasil mengembangkan teknologi sel surya dan dikenal sebagai orang pertama yang membuat paten piranti solar sel modern. Bahan yang digunakan adalah silikon dan mampu menghasilkan
efisiensi sebesar 4%. Era sel surya modern baru dimulai setelah penemuan fenomena photovoltaik pertama pada tahun 1954, yakni ketika tiga
peneliti Bell Laboratories di Amerika Serikat (Chapin,Fullr,dan Pearson) secara tidak sengaja menemukan bahwa sambungan dioda p-n dari silikon mampu membangkitkan tenaga listrik ketika lampu laboratorium
7
sel surya pertama dengan efisiensi sebesar 6%. Pada akhirnya , penelitian sel surya yang berkembang hingga saat ini memiliki banyak jenis dan
variasi teknologi pembuatannya.[1]
2.1.1 Modul Panel Surya
Modul Sel Surya (Photovoltaik) adalah sejumlah sel surya yang dirangkai secara seri maupun paralel ,untuk meningkatkan tegangan maupun arus
yang dihasilkan sehingga cukup untuk pemakaian sistem catu daya beban. Untuk mendapatkan keluaran energi listrik yang maksimum maka permukaan modul surya harus selalu mengarah ke matahari. Daya listrik
yang dihasilkan photovoltaik berupa daya listrik DC yang kemudian akan dikonversikan menjadi daya listrik AC.
8
2.1.2 Prinsip Kerja Sel Surya Photovoltaik
Pengkonversian sinar matahari menjadi listrik dengan panel photovoltaik
,kebanyakan menggunakan Poly Cristallyne Sillicon sebagai material semikonduktor photo cell mereka. Prinsipnya sama dengan prinsip dioda p-n. Gambar di bawah ini mengilustrasikan prinsip kerja photovoltaik
panel.
Gambar 2.2. Prinsip kerja sel surya [3]
Secara sederhana, proses pembentukan gaya gerak listrik pada sebuah sel surya adalah sebagai berikut:
Foton dari cahaya matahari menumbuk panel surya kemudian diserap oleh material semikonduktor seperti silikon.
9
Gabungan/susunan beberapa panel surya mengubah energi surya menjadi sumber daya listrik DC. yang nantinya akan disimpan dalam suatu wadah
yang dinamakan baterai.
Daya listrik DC tidak dapat langsung digunakan pada rangkaian listrik rumah atau bangunan sehingga harus mengubah daya listriknya dengan
daya listrik AC. Dengan menggunakan konverter inilah maka daya listrik DC dapat berubah menjadi daya listrik AC sehingga sekarang dapat
digunakan untuk memenuhi kebutuhan listrik.
2.2Mikrokontroller
Mikrokontroler adalah sebuah sistem komputer lengkap dalam satu serpih (chip). Mikrokontroler lebih dari sekedar sebuah mikroprosesor karena
sudah terdapat atau berisikan ROM (Read-Only Memory), RAM ( Read-Write Memory), beberapa bandar masukan maupun keluaran, dan beberapa
peripheral seperti pencacah/pewaktu, ADC (Analog to Digital converter),
DAC (Digital to Analog converter) dan serial komunikasi. Salah satu mikrokontroler yang banyak digunakan saat ini yaitu mikrokontroler AVR. AVR adalah mikrokontroler RISC (Reduce Instuction Set Compute)
8 bit berdasarkan arsitektur Harvard. Secara umum mikrokontroler AVR dapat dapat dikelompokkan menjadi 3 kelompok, yaitu keluarga
AT90Sxx, ATMega dan ATtiny. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fiturnya. Seperti mikroprosesor pada umumnya, secara internal mikrokontroler ATMega16
10
himpunan register kerja, register dan dekoder instruksi, dan pewaktu beserta komponen kendali lainnya. Berbeda dengan mikroprosesor,
mikrokontroler menyediakan memori dalam serpih yang sama dengan prosesornya (in chip). [4]
2.2.1 Arsitektur ATMega16
Mikrokontroler ini menggunakan arsitektur Harvard yang memisahkan
memori program dari memori data, baik bus alamat maupun bus data, sehingga pengaksesan program dan data dapat dilakukan secara bersamaan (concurrent).
Secara garis besar mikrokontroler ATMega16 terdiri dari :
1. Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi
16 Mhz.
1. Memiliki kapasitas Flash memori 16Kbyte, EEPROM 512 Byte, dan SRAM 1Kbyte
2. Saluran I/O 32 buah, yaitu Bandar A, Bandar B, Bandar C, dan Bandar D.
3. CPU yang terdiri dari 32 buah register.
2. User interupsi internal dan eksternal
3. Bandar antarmuka SPI dan Bandar USART sebagai komunikasi serial
4. Fitur Peripheral
• Dua buah 8-bit timer/counter dengan prescaler terpisah dan mode compare
11
compare, dan mode capture
• Real time counter dengan osilator tersendiri
• Empat kanal PWM dan Antarmuka komparator analog • 8 kanal, 10 bit ADC
• Byte-oriented Two-wire Serial Interface
• Watchdog timer dengan osilator internal
12
2.2.2 Konfigurasi Pin ATMega 16
Konfigurasi pena (pin) mikrokontroler Atmega16 dengan kemasan 40-
pena dapat dilihat pada Gambar 11. Dari gambar tersebut dapat terlihat ATMega16 memiliki 8 pena untuk masing-masing bandar A (Port A), bandar B (Port B), bandar C (Port C), dan bandar D (Port D).
Gambar 2.4. Pin-Pin ATMega 16 [5]
2.2.3 Deskripsi Mikrokontroller ATMega 16
Mikrokontroller ATMega 16 terdiri dar beberapa bagian yaitu :
VCC (Power Supply) dan GND(Ground)
13
Bandar A berfungsi sebagai input analog pada konverter A/D. Bandar A juga sebagai suatu bandar I/O 8-bit dua arah, jika A/D konverter tidak
digunakan. Pena - pena Bandar dapat menyediakan resistor internal pull-up (yang dipilih untuk masing-masing bit). Bandar A output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi
dan kemampuan sumber. Ketika pena PA0 ke PA7 digunakan sebagai input dan secara eksternal ditarik rendah, pena–pena akan memungkinkan
arus sumber jika resistor internal pull-up diaktifkan. Pena Bandar A adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
Bandar B (PB7..PB0)
Bandar B adalah suatu bandar I/O 8-bit dua arah dengan resistor internal
pull-up (yang dipilih untuk beberapa bit). Bandar B output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi
dan kemampuan sumber. Sebagai input, pena Bandar B yang secara eksternal ditarik rendah akan arus sumber jika resistor pull-up diaktifkan. Pena Bandar B adalah tri-stated manakala suatu kondisi reset menjadi
aktif, sekalipun waktu habis.
Bandar C (PC7..PC0)
Bandar C adalah suatu bandar I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit). Bandar C output buffer
14
Pena bandar C adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
Bandar D (PD7..PD0)
Bandar D adalah suatu bandar I/O 8-bit dua arah dengan resistor internal
pull-up (yang dipilih untuk beberapa bit). Bandar D output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan sumber. Sebagai input, pena bandar D yang secara
eksternal ditarik rendah akan arus sumber jika resistor pull-up diaktifkan. Pena Bandar D adalah tri-stated manakala suatu kondisi reset menjadi
aktif, sekalipun waktu habis.
RESET (Reset input)
XTAL1 (Input Oscillator)
XTAL2 (Output Oscillator)
AVCC adalah pena penyedia tegangan untuk bandar A dan
Konverter A/D.
AREF adalah pena referensi analog untuk konverter A/D.
2.2.4 Peta Memori ATMega 16
Arsitektur ATMega16 mempunyai dua memori utama, yaitu memori data
dan memori program. Selain itu, ATMega16 memiliki memori EEPROM untuk menyimpan data. ATMega16 memiliki 16Kbyte On-chip In-System Reprogrammable Flash Memory untuk menyimpan program. Instruksi
15
bagian program boot dan aplikasi seperti terlihat pada Gambar 5 Bootloader adalah program kecil yang bekerja pada saat sistem dimulai
yang dapat memasukkan seluruh program aplikasi ke dalam memori prosesor.
Gambar 2.5. Peta Memori ATMega 16 [6]
2.2.5 Perangkat Lunak Mikrokontroller ATMega 16.
Sebuah mikrokontroler tidak akan bekerja bila tidak diberikan program
untuk diisikan ke dalam mikrokontroler tersebut. Oleh karena itu, dalam tugas akhir ini akan digunakan perangkat lunak CodeVisionAVR sebagai media penghubung antara program yang akan diisikan ke mikrokontroler
ATMega16 yang menggunakan bahasa C. Pemrograman mikrokontroler AVR dapat menggunakan low level language (assembly) dan high level
16
digunakan. Bahasa Assembler pada mikrokontroler AVR memiliki kesamaan instruksi, sehingga jika telah menguasai pemrograman satu jenis
mikrokontroler AVR, maka akan dengan mudah untuk memprogram mikrokontroler AVR jenis lain, tetapi bahasa assembler relatif lebih sulit dipelajari daripada bahasa C, untuk pembuatan suatu proyek yang besar
akan memakan waktu yang lama, serta penulisan programnya akan panjang. Sedangkan bahasa C memiliki keunggulan dibandingkan bahasa
assembly yaitu penyusunan program akan lebih sederhana dan mudah pada proyek yang lebih besar. Bahasa C hampir bisa melakukan semua operasi yang dapat dikerjakan oleh bahasa mesin. CodeVisionAVR pada
dasarnya merupakan perangkat lunak pemrograman mikrokontroler keluarga AVR berbasis bahasa C. Ada tiga komponen penting yang telah
diintegrasikan dalam perangkat lunak ini: Compiler C, IDE dan program generator. Berdasarkan spesifikasi yang dikeluarkan oleh perusahaan pengembangnya, Compiler C yang digunakan hampir
mengimplementasikan semua komponen standar yang ada pada bahasa C standar ANSI (seperti struktur program, jenis tipe data, jenis operator, dan library fungsi standar berikut penamaannya). Tetapi walaupun demikian,
dibandingkan bahasa C untuk aplikasi komputer, compiler C untuk mikrokontroler ini memiliki sedikit perbedaan yang disesuaikan dengan
arsitektur AVR tempat program C tersebut ditanamkan (embedded). Khusus untuk library fungsi, disamping library standar (seperti fungsi- fungsi matematik, manipulasi string, pengaksesan memori dan
17
yang sangat bermanfaat dalam pemrograman antarmuka AVR dengan perangkat luar yang umum digunakan dalam aplikasi kontrol. Beberapa
fungsi library yang penting diantaranya adalah fungsi-fungsi untuk pengaksesan LCD, komunikasi I2C, IC RTC (Real time Clock), sensor suhu, SPI (Serial Peripheral Interface) dan lain sebagainya. Untuk
memudahkan pengembangan program aplikasi, CodeVisionAVR juga dilengkapi IDE yang sangat user friendly. Selain menu-menu pilihan yang
umum dijumpai pada setiap perangkat lunak berbasis Windows, CodeVisionAVR ini telah mengintegrasikan perangkat lunak downloader yang bersifat In System Programmer yang dapat digunakan untuk
mentransfer kode mesin hasil kompilasi ke dalam sistem memori mikrokontroler AVR yang sedang diprogram. CodeVisionAVR juga
menyediakan sebuah fitur yang dinamakan dengan Code Generator atau CodeWizardAVR. Secara praktis, fitur ini sangat bermanfaat membentuk sebuah kerangka program (template), dan juga memberi kemudahan bagi
programmer dalam peng-inisialisasian register-register yang terdapat pada mikrokontroler AVR yang sedang diprogram. Dinamakan Code Generator, karena perangkat lunak CodeVision ini akan membangkitkan kode-kode
program secara otomatis setelah fase inisialisasi pada jendela CodeWizardAVR selesai dilakukan. Secara teknis, penggunaan fitur
18
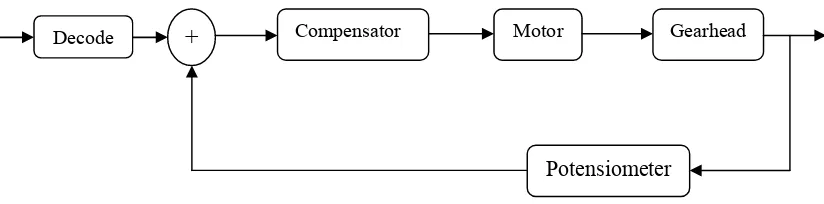
2.3Motor servo
Motor servo adalah sebuah motor dengan sistem umpan balik tertutup di
mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer
berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim
melalui kaki sinyal dari kabel motor.
Gambar 2.6. Cara kerja motor servo
Karena motor DC servo merupakan alat untuk mengubah energi listrik menjadi energi mekanik, maka magnit permanent motor DC servolah yang
mengubah energi listrik ke dalam energi mekanik melalui interaksi dari dua medan magnit. Salah satu medan dihasilkan oleh magnit permanen
dan yang satunya dihasilkan oleh arus yang mengalir dalam kumparan motor. Resultan dari dua medan magnit tersebut menghasilkan torsi yang membangkitkan putaran motor tersebut. Saat motor berputar, arus pada
19
Secara umum terdapat 2 jenis motor servo. Yaitu :
1. Motor servo standar dan motor servo Continous. Servo motor tipe
standar hanya mampu berputar 180 derajat. Motor servo standar sering dipakai pada sistim robotika misalnya untuk membuat “ Robot Arm” ( Robot Lengan ).
2. Servo motor continuous dapat berputar sebesar 360 derajat. motor servo Continous sering dipakai untuk Mobile Robot. Pada badan servo tertulis tipe servo yang bersangkutan.
Motor servo merupakan sebuah motor dc kecil yang diberi sistem gear dan potensiometer sehingga dia dapat menempatkan “horn” servo pada posisi
yang dikehendaki. Karena motor ini menggunakan sistim close loop sehingga posisi “horn” yang dikehendaki bisa dipertahanakan. “Horn”
pada servo ada dua jenis. Yaitu Horn “ X” dan Horn berbentuk bulat, seperti pada gambar 2.7.
a b Gambar 2.7a. Servo dengan horn x
20
Gambar 2.8. Kaki motor servo. [7]
Pengendalian gerakan batang motor servo dapat dilakukan dengan
menggunakan metode PWM. (Pulse Width Modulation). Teknik ini menggunakan sistem lebar pulsa untuk mengemudikan putaran motor. Sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim
melalui kaki sinyal dari kabel motor. Tampak pada gambar dengan pulsa 1.5 mS pada periode selebar 2 ms maka sudut dari sumbu motor akan
berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan
jarum jam.
21
Untuk menggerakkan motor servo ke kanan atau ke kiri, tergantung dari nilai delay yang kita berikan. Untuk membuat servo pada posisi center,
berikan pulsa 1.5ms. Untuk memutar servo ke kanan, berikan pulsa <=1.3ms, dan pulsa >= 1.7ms untuk berputar ke kiri dengan delay 20ms, seperti ilustrasi berikut:
Motor Servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50Hz.
Dimana pada saat sinyal dengan frekuensi 50Hz tersebut dicapai pada kondisi Ton duty cycle 1.5ms, maka rotor dari motor akan
berhenti tepat di tengah-tengah (sudut 0° / netral).
Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5ms, maka rotor akan berputar ke arah kiri dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan
akan bertahan diposisi tersebut.
Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5ms, maka rotor akan berputar ke arah kanan dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle,
22
2.4Sensor Cahaya
Sensor cahaya adalah suatu komponen yang digunakan dalam bidang
elektronika, komponen ini berfungsi untuk mengubah besaran cahaya menjadi besaran listrik. Komponen ini dapat memungkinkan kita untuk melakukan pendeteksian cahaya dan kemudian melakukan perubahan
terhadapnya menjadi besaran listrik, sehingga dapat diolah sesuai dengan keperluan yang dibutuhkan. Cara kerja alat ini adalah mengubah energi
foton menjadi elektron, umumnya satu foton dapat membangkitkan satu elektron. Komponen ini mempunyai fungsi yang sangat luas salah satunya adalah pada kamera digital. Beberapa komponen yang biasanya digunakan
dalam rangkaian sensor cahaya adalah Light Dependent Resistor, Photodioda, dan PhotoTransistor.
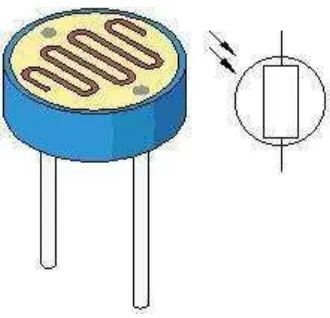
2.4.1 Light Dependent Resistor.
Salah satu komponen yang menggunakan sensor cahaya adalah Light Dependent Resistor (LDR), adalah suatu komponen elektronika yang
memiliki hambatan yang dapat berubah sesuai perubahan intensitas cahaya, resistensi dari LDR akan menurun jika ada penambahan intensitas
cahaya yang mengenainya. Pada dasarnya komponen ini merupakan suatu resistor yang memiliki nilai resistensi bergantung pada jumlah cahaya
yang jatuh pada permukaan sensor tersebut. LDR dapat dibuat dari semikonduktor beresistensi tinggi yang tidak dilindungi dari cahaya. Jika cahaya yang mengenainya memiliki frekuensi yang cukup tinggi, foton
23
energi yang cukup untuk meloncat ke pita konduksi. Elektron bebas yang dihasilkan (dan pasangan lubangnya) akan mengalirkan listrik, sehingga
menurunkan resistensinya.
Gambar 2.10. Light Dependent Resistor
2.4.2 Photodioda.
Photodioda adalah komponen elektronika yang merupakan salah satu jenis
dari dioda, berfungsi untuk mendeteksi cahaya. Meskipun merupakan jenis dioda, tetapi cara kerjanya berbeda dengan dioda biasa. Photodioda akan mengubah cahaya menjadi arus listrik. Komponen elektronika ini mampu
mendeteksi bermacam-macam jenis cahaya yaitu mulai dari cahaya infra merah, cahaya tampak, ultra violet sampai dengan Sinar-X. Photodioda
24
Gambar 2.11 Simbol Photodioda.[9]
Photodioda juga termasuk sensor cahaya yang bisa mengalirkan arus listrik dalam satu arah dari satu sisi ke sisi lainnya ketika menyerap atau
menangkap cahaya. Semakin banyak cahaya yang diserap, maka semakin banyak pula arus yang mengalir. Photodioda ini juga biasa digunakan
untuk mendeteksi pulsa cahaya dalam serat optik yang sensitif terhadap gerakan cahaya. Photodioda ini prinsip kerjanya merupakan kebalikan dari LED ( Light Emitting Diode ).
2.4.3 Photo Transistor
Komponen yang menggunakan sensor cahaya berikutnya adalah Photo Transistor / fototransistor, secara sederhana adalah sebuah transistor bipolar yang memakai kontak (junction) base-collector yang menjadi
permukaan agar dapat menerima cahaya sehingga dapat digunakan menjadi konduktivitas transistor. Secara lebih detail Photo Transistor
merupakan sebuah benda padat pendeteksi cahaya yang memiliki gain internal. Hal ini yang membuat foto transistor memiliki sensivitas yang lebih tinggi dibandingkan photodiode / foto diode, dalam ukuran yang
sama. Alat ini dapat menghasilkan sinyal analog maupun sinyal gigital. Photo Transistor sejenis dengan transistor pada umumnya, bedanya pada
III. METODE PENELITIAN
3.1 Waktu dan Tempat Penelitian
Pengerjaan tugas akhir ini bertempat di laboratorium Terpadu Teknik Elektro
Jurusan Teknik Elektro Universitas Lampung pada bulan Desember 2013
sampai dengan bulan April 2014.
3.2 Alat dan Bahan
Adapun peralatan dan bahan-bahan yang digunakan pada penelitian ini adalah
sebagai berikut :
1. Satu unit Laptop dengan spesifikasi Intel(R)Atom(TM) CPU D2500
1,86GHz dan sistem operasi windows7 Ultimate.
2. Perangkat Lunak mikrokontroler Code Vision AVR (Alf and Vegard’s
Risc processor) ATmega 16 sebagai alat bantu pemograman.
3. Instrumen dan komponen yang terdiri dari :
a) Multimeter
b) Mikrokontroler Atmega16
c) Dioda
d) Resitor
e) Sensor Photodioda
26
g) IC ( Integrated Circuit )
4. Perangkat kerja yakni :
a) PowerSupply
b) Baterai
c) Rangkaian Minimum Mikrokontroler
d) Downloader
e) Papan Projek ( Projek Board )
f) Bor PCB
g) Solder
h) Motor Servo
i) Larutan Clorida
j) Kabel Penghubung
5.Bahan-Bahan PendukungSeperti
a) Papan plastik mika ( Accrilyc )
b) PCB
c) Timah Solder
d) Aluminium
3.3 Tahap – Tahap Dalam Perancangan Tugas Akhir
Dalam Penyelesaian tugas akhir ini ada beberapa langkah kerja yang akan
27
1. Studi Literatur
Studi literatur dimaksudkan untuk mempelajari berbagai teori yang
berkaitan dengan perancangan penggerak otomatis panel surya.
2. Blok diagram perancangan
Secara umum perancangan sistem pada tugas akhir ini dapat dilihat
pada Gambar 3.1 berikut ini :
Gambar 3.1 Blok Diagram Perancangan Sistem Kendali Posisi Model Panel
Surya
Dari blok diagram diatas dapat diketahui bahwa hasil intensitas cahaya yang
terbaca oleh sensor photodioda akan menjadi masukan untuk mikrokontroller,
kemudian mikrokontroller menggerakkan motor servo sesuai dengan nilai
ADC yang didapat oleh sensor photodioda. Selanjutnya posisi dari panel
surya akan digerakkan sesuai dengan nilai setting yang sudah diprogram.
28
Pembuatan blok diagram perancangan sistem ini bertujuan untuk
mempermudah dalam melakukan tahap – tahap pembuatan alat. Selain itu
dapat mempermudah pula dalam melakukan analisa bagian per bagian pada
saat uji coba alat baik secara bagian per bagian maupun secara keseluruhan.
Pada pembuatan alat penggerak panel surya secara otomatis ini akan
diharapkan dapat mengerjakan secara berurutan mulai dari uji coba sensor,
kemudian pembuatan program pada mikrokontroller hingga sampai yang
terakhir dapat dengan secara otomatis mendapatkan posisi panel surya yang
sesuai dengan intensitas cahaya matahari.
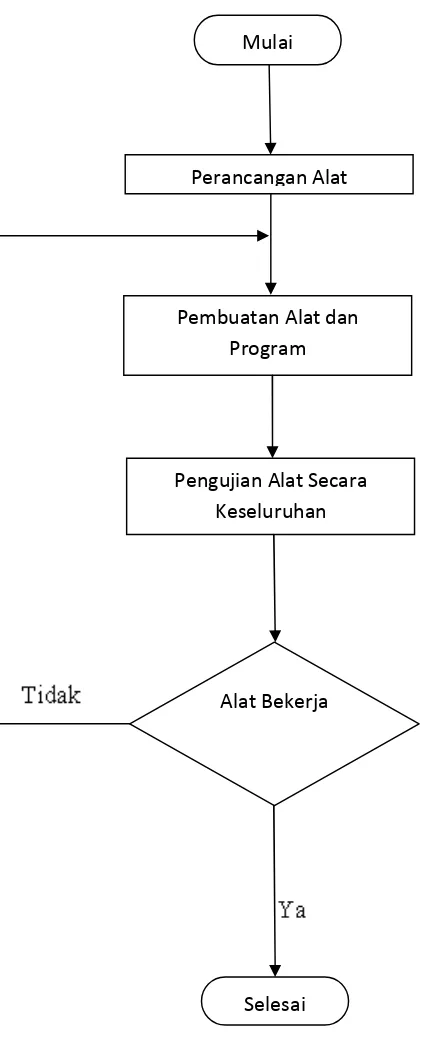
a) Diagram alir penelitian
Diagram alir penelitian yang akan dilakukan dapat dilihat pada gambar
3.2. Diawali dengan perancangan alat, pembuatan alat dan program, dan
pengujian alat secara keseluruhan. Penelitian ini bertujuan untuk
mengatur posisi dari panel surya agar selalu mengarah kepada cahaya
matahari sehingga mampu membuat penyerapan energi yang dilakukan
29
Gambar 3.2 Diagram Alir Penelitian. Mulai
Perancangan Alat
Pembuatan Alat dan Program
Pengujian Alat Secara Keseluruhan
Alat Bekerja
30
b) Diagram alir prinsip kerja alat
Gambar 3.3Diagram alir prinsip kerja alat Mulai
Photodioda terkena
cahaya
Baca nilai ADC yang diperoleh
Mikrokontroller Terjemahkan
Sinyal
Servo
Selesai Posisi Panel
31
Gambar diatas adalah diagram alir prinsip kerja alat penggerak otomatis
panel surya yang akan dibuat dalam tugas akhir ini. Dari gambar diatas
dapat dijelaskan bahwa sebelum masing – masing komponen dijadikan
satu – kesatuan terlebih dahulu harus melakukan uji coba sensor terhadap
perubahan posisi sumber cahaya yang mengenainya. Hal ini diperlukan
untuk melihat sensitivitas yang dimiliki oleh sensor photodioda. Sistem
diatas menggunakan sistem kendali open loop, karena hasil dari
pergerakan posisi panel surya tidak berpengaruh untuk nilai masukan yang
diperoleh dari sensor, dan juga tidak memiliki umpan balik. Jadi ketika
eksekusi telah dilakukan oleh motor servo, maka hasil pergerakan tersebut
adalah posisi akhir yang akan dilakukan untuk sekali masukan yang
diperoleh dari sensor. Sehingga tidak ada proses untuk mengkoreksi
apakah posisi panel tersebut sudah dalam posisi yang berhadapan dengan
sumber cahaya.
3.4 Spesifikasi Alat
Dalam melakukan suatu penelitian yang bertujuan untuk membuat suatu alat,
maka penting untuk menentukan spesifikasi komponen - komponen penyusun
yang akan dibuat dalam penelitian tersebut. Hal ini dibutuhkan agar tidak
terjadi kesalahan dalam pemilihan komponen pada saat proses pembuatan
alat. Sebagai contoh pada pembuatan lengan robot, maka diperlukan suatu
asumsi bahwa fungsi – fungsi apa saja yang dapat dilakukan oleh lengan
robot tersebut, ketika fungsi tersebut dapat ditentukan, maka tahap
32
spesifikasi yang sudah ditentukan. Komponen – komponen tersebut harus
mendukung fungsi-fungsi yang sudah ditentukan sebelumnya. Pada penelitian
kali ini tracker panel surya ditentukan untuk mengikuti arah intensitas cahaya
matahari yang paling besar, oleh karena itu pada penelitian ini digunakan
sebuah sensor photodioda yang berfungsi sebagai sensor cahaya. Prinsip
kerja dari sensor photodioda atau sensor cahaya ini adalah dengan mengubah
identitas cahaya menjadi nilai arus, nilai arus pada photodioda berubah sesuai
dengan intensitas cahaya yang diterima. Apabila photodioda menerima
intensitas cahaya yang besar maka nilai arus akan naik,sedangkan jika cahaya
yang mengenainya redup maka arusnya pun akan mengecil. Rangkaian
sensor photodioda dapat dilihat pada Gambar 3.4 dibawah ini :
Gambar 3.4 Rangkaian Sensor photodioda.[9]
Sementara untuk komponen sistem kontrol pada penggerak otomatis yaitu
digunakan sebuah mikrokontroller ATMega 16. Digunakannya
33
pada pembuatan penggerak otomatis ini. Selain itu sebagai media penggerak
utama pada sistem mekanik yang digunakan adalah motor servo. Motor servo
adalah sebuah motor dengan sistem umpan balik tertutup di mana posisi dari
motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam
motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear,
potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk
menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu
motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal
dari kabel motor. Berikut ini adalah spesifikasi dari motor servo yang
digunakan :
Torsi/kekuatan : 12KG
Kecepatan : 0.16detik/60derajat
Tegangan masukan : 5~7Volt
Type : Digital
Gearing : Metal
Berat : 55gram
Ukuran : 4.07 x 1.97 x 4.29cm
3.5 Metode Penelitian
Metode penelitian yang digunakan dalam tugas akhir ini adalah menerapkan
mikrokontroler Atmega16 sebagai pengendali proses pengaturan otomatis
pada panel surya. Mikrokontroler adalah sebuah sistem komputer fungsional
dalam sebuah chip. Di dalamnya terkandung sebuah inti prosesor, memori
34
inputoutput. Dengan kata lain, mikrokontroler adalah suatu alat elektronika
digital yang mempunyai masukan dan keluaran serta kendali dengan program
yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler
sebenarnya membaca dan menulis data. Beberapa tahun terakhir,
mikrokontroler sangat banyak digunakan terutama dalam pengontrolan robot.
Seiring perkembangan elektronika, mikrokontroler dibuat semakin kompak
dengan bahasa pemrograman yang juga ikut berubah. Salah satunya adalah
mikrokontroler AVR (Alf and Vegard’s Risc processor) ATmega16 yang
menggunakan teknologi RISC (Reduce Instruction Set Computing) dimana
program berjalan lebih cepat karena hanya membutuhkan satu siklus clock
untuk mengeksekusi satu instruksi program. Secara umum, AVR dapat
dikelompokkan menjadi 4 kelas, yaitu kelas ATtiny, keluarga AT90Sxx,
keluarga ATmega, dan AT86RFxx. Pada dasarnya yang membedakan
masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi
arsitektur dan instruksi yang digunakan,mereka bisa dikatakan hampir sama.
Mikrokontroler AVR ATmega16 memiliki fitur yang cukup lengkap.
Mikrokontroler AVR ATmega16 telah dilengkapi dengan ADC internal,
EEPROM internal, Timer/Counter, PWM, analog comparator, dan fitur
lainnya. Sehingga dengan fasilitas yang lengkap ini memungkinkan untuk
mempelajari mikrokontroler keluarga AVR dengan lebih mudah dan efisien,
serta dapat mengembangkan kreativitas penggunaan mikrokontroler
ATmega16. Pada penelitian kali ini mikrokontroller ATMega 16 berfungsi
sebagai pengatur dari putaran motor servo, sesuai dengan intensitas cahaya
35
poin sebelumnya, bahwa sebelum memulai pembuatan alat, pertama kali yang
dilakukan adalah melakukan kalibrasi sensor. Kalibrasi sensor penting
dilakukan karena aksi dari motor servo akan ditentukan dari hasil kalibrasi
sensor photodioda. Setelah hasil kalibrasi sensor didapatkan, nilai – nilai
tersebut akan menjadi acuan dalam pembuatan listing program pada
perangkat lunak codevision avr. Hasil pembuatan program akan dimasukan
kedalam mikrokontroller agar dapat melihat aksi dan hasil dari program yang
sudah dibuat, apabila aksi dari motor servo belum sesuai maka akan
dilakukan pengecekan pada pembuatan program dan memperbaiki nilai
kalibrasi agar lebih presisi dan sesuai dengan pergerakan motor servo yang
diinginkan.
Prinsip Kerja Alat.
Penggerak otomatis ini bergerak berdasarkan pergerakan motor yang
bergerak dengan satu arah atau satu axis yaitu timur ke barat. Motor servo
akan dikontrol oleh mikrokontroller ATMega 16. Mikrokontroller mengatur
pergerakan motor servo berdasarkan masukan yang dikirim dari sensor.
Sensor yang digunakan yaitu sensor cahaya atau sensor photodioda. Pada
sistem penggerak ini sensor yang dibutuhkan berjumlah tujuh buah.
Photodioda akan disusun sedemikian rupa sehingga menyerupai arah
pergerakan bumi terhadap matahari sebesar 180°. Ilustrasi dari susunan
36
Gambar 3.5 Susunan sensor photodioda
Susunan photodioda diatas diatur berdasarkan posisi matahari, sensor photodioda
pertama dipasang pada sudut 300 karena pada saat posisi itulah sinar matahari
mulai dapat mengenai permukaan panel surya, jika pada sudut dibawah dari 300
sinar matahari belum terlihat secara jelas. Apabila dilihat dari sudut pandang
waktu, maka sudut 300 tersebut kira-kira berada pada pukul 08.00. Seperti yang
dapat dilihat pada tabel dibawah ini.
Tabel 3.1 Penentuan Waktu Menurut Sudut
37
Ketika cahaya matahari mengenai photodioda maka mikrokontroller akan mencari
nilai ADC tertinggi diantara photodioda yang terkena cahaya matahari, nilai ADC
tersebut akan memberikan instruksi kepada mikrokontroller agar menggerakkan
motor servo sesuai dengan derajat posisi photodioda yang memiliki yang memiliki
nilai ADC tertinggi. Apabila posisi matahari berada pada sudut 900, maka sensor
photodioda keempat yang berada pada sudut 900 tersebut akan mengeluarkan nilai
ADC tertinggi, nilai ADC tersebut kemudian akan menjadi acuan mikrokontroller
dalam menggerakkan posisi motor servo sesuai dengan posisi photodioda yang
✁KESIMPULAN DAN SARAN
A. Kesimpulan :
Dari serangkaian penelitian, pengujian, dan analisa yang telah dilakukan maka
dapat disimpulkan bahwa:
1. Alat penggerak otomatis panel surya mengunakan sensor photodioda
berbasis mikrokontroller ATMega 16 telah dibuat untuk mengoptimalkan
penyerapan energi oleh panel surya.
2. Alat ini mampu melakukan pembacaan terhadap cahaya matahari
menggunakan sensor photodioda dengan baik, yaitu memiliki tingkat
sensitivitas yang tinggi terhadap cahaya. Kemudian sistem ini juga mampu
mengontrol motor servo sebagai penggerak utama dalam pergerakan panel
surya.
3. Terjadi penyimpangan nilai sudut panel surya pada posisi derajatnya, hal
ini disebabkan dari proses kalibrasi yang masih bersifat manual, namun
nilai penyimpangan tersebut tidak terlalu besar sehingga hampir tidak
terlihat terjadinya pergeseran sudut.
4. Hasil pergerakan dari motor servo tidak mampu berjalan dengan halus, ini
dikarenakan disain mekanik dari sistem penggerak belum baik, sehingga
diperlukan disain mekanik yang mampu membuat motor servo bekerja
66
5. Alat penggerak otomatis ini hanya mampu beroperasi dalam waktu 1
(satu) hari, karena daya yang didapatkan tidak sebanding dengan daya
yang digunakan untuk mengoperasikan penggerak otomatis itu sendiri.
B. SARAN
Penggerak otomatis panel surya menggunakan sensor photodioda berbasis
mikrokontroller ATMega 16 sudah mampu beroperasi, sensor photodioda mampu
melakukan pembacaan terhadap cahaya matahari dan mikrokontroller menjadi
pengendali utama dari sistem ini. Untuk proses kalibrasi sensor dan kalibrasi
motor servo perlu dilakukan dengan proses yang lebih teliti agar sudut pergerakan
dari dudukan panel surya benar – benar tegak lurus dengan arah cahaya matahari
yang datang mengenai permukaan sensor photodioda. Kemudian untuk sistem
mekanik harus diperbaiki agar tidak merusak motor servo, sistem mekanik yang
lebih baik akan mampu meringankan kerja motor dan membuat perpindahan sudut
lebih akurat. Perancangan yang dibuat tidak sesuai dengan yang diharapkan
karena hanya bisa beroperasi pada kondisi baterai dalam keadaan penuh, dengan
lama waktu satu hari, karenanya perlu dikembangkan dengan menggunakan
baterai (aki) yang memiliki kapasaitas yang lebih besar dan material yang lebih
ringan agar energi yang dihasilkan bisa digunakan kontinyu tidak hanya satu hari
saja atau dengan kata lain alat penggerak otomatis ini dapat langsung diterapkan
DAFTAR PUSTAKA
[1] Rangkaian Listrik, William H. Hayt,Jr., Jack E.Kemmerly. , Steven M.Durbin
[2] Wind and Solar Power System, Mukund R. Patel
[1] Partical photovoltaics electricity from solar cells, Richard J. Komp, Ph.D.
[3] Perhitungan instalasi listrik Volume 1., J.WATKINS, R.K. PARTON
[4] Fisika UNIVERSITAS EDISI KE SEPULUH, SCHAUM’S OUTLINES
[1] http://www.nekomata08.weebly.com/uploads/k2_photovoltaic.doc
[5 Oktober 2013]
[2] http://images01.olx.co.id/ui/18/25/39/1329968070_321121639_1- Gambar--SEL-
SURYA-SEL-PHOTOVOLTAIC-PANELSURYA-MODULSURYA-PLTS.jpg
[7 Oktober 2013]
[3]
http://teknologisurya.wordpress.com/dasar-teknologi-sel-surya/prinsip-kerja sel-surya/ [ 9 Oktober 2013]
[4] [5] [6]Pemrograman Bahasa C untuk Mikrokontroller Atmega 16, M.Ary
Heryanto,ST & Ir. Wisnu Adi P.
[7]Belajar sendiri : membuat robot cerdas, Oleh: Widodo Budiharto
[8]
http://elektronika-dasar.web.id/komponen/sensor-tranducer/sensor-cahaya-ldr-light-dependent-resistor/ [20 November 2013]
[8]Sistim cepat belajar elektronika ( Pemula ), Drs. Pambudi Prasetya
[9]http://edukasielektro.blogspot.com/2013/02/photo-dioda.html [20 November 2013]
![Gambar 2.1. Modul sel surya dipasang seri[2]](https://thumb-ap.123doks.com/thumbv2/123dok/541674.149272/24.595.156.501.443.616/gambar-modul-sel-surya-dipasang-seri.webp)
![Gambar 2.2. Prinsip kerja sel surya [3]](https://thumb-ap.123doks.com/thumbv2/123dok/541674.149272/25.595.138.473.277.459/gambar-prinsip-kerja-sel-surya.webp)
![Gambar 2.3. Blok Diagram ATMega 16 [4]](https://thumb-ap.123doks.com/thumbv2/123dok/541674.149272/28.595.190.469.276.687/gambar-blok-diagram-atmega.webp)
![Gambar 2.4. Pin-Pin ATMega 16 [5]](https://thumb-ap.123doks.com/thumbv2/123dok/541674.149272/29.595.200.429.230.478/gambar-pin-pin-atmega.webp)
![Gambar 2.5. Peta Memori ATMega 16 [6]](https://thumb-ap.123doks.com/thumbv2/123dok/541674.149272/32.595.245.390.226.460/gambar-peta-memori-atmega.webp)
![Gambar 2.8. Kaki motor servo. [7]](https://thumb-ap.123doks.com/thumbv2/123dok/541674.149272/37.595.221.439.528.719/gambar-kaki-motor-servo.webp)
![Gambar 2.11 Simbol Photodioda.[9]](https://thumb-ap.123doks.com/thumbv2/123dok/541674.149272/41.595.277.391.89.131/gambar-simbol-photodioda.webp)