ANALISIS PERHITUNGAN PANAS PADA MOTOR DC
PENGUATAN SHUNT AKIBAT KERJA TERUS MENERUS
( CONTINUOUS DUTY ) MULAI PADA SAAT START
SAMPAI PENGEREMAN
( Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU )
Oleh
MARTUA SITOMPUL
060402002
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
KATA PENGANTAR
Puji dan syukur kepada Tuhan Yang Maha Esa, yang telah memberikan rahmat dan karunianya kepada penulis sehingga dapat menyelesaikan Tugas Akhir ini, yang merupakan persyaratan untuk menyelesaikan studi di Departemen Teknik Elektro Fakultas Teknik USU. Dalam penulisan Tugas Akhir ini, penulis mengambil judul :
”ANALISIS PERHITUNGAN PANAS PADA MOTOR DC
PENGUATAN SHUNT AKIBAT KERJA TERUS MENERUS
(CONTINUOUS DUTY) MULAI PADA SAAT START SAMPAI
PENGEREMAN”
( Aplikasi pada Laboratorium Konversi Energi Listrik FT-USU )
Penulis menyadari bahwa tulisan ini tidak akan selesai tanpa adanya bantuan dan dukungan dari berbagai pihak.
Pada kesempatan ini saya ingin menyampaikan ucapan terima kasih yang tulus dan sebesar-besarnya kepada:
1. Kedua orang tua penulis, Lokot Sitompul dan Derlina Lubis serta abang dan kakak penulis (surung, oloan, anggur, ani, dewi, ros, juri) yang tidak pernah berhenti memberi dukungan, semangat dan doanya kepada saya dengan segala pengorbanan dan kasih sayang yang tidak ternilai besarnya. 2. Bapak Prof.Dr.Ir.Usman S Baafai selaku Ketua Departemen Teknik
Elektro Fakultas Teknik USU.
4. Bapak Ir. Sumantri Zulkarnaen, sebagai Dosen Pembimbing Tugas Akhir penulis yang sangat besar bantuannya bagi penulis dalam menyelesaikan Tugas Akhir ini.
5. Ibu Ir. Windalina Syafiar, selaku Dosen Wali Penulis yang telah banyak membimbing dan membantu selama masa kuliah sampai penyusunan Tugas Akhir ini.
6. Bapak Ir. Satria Ginting sebagai Kepala Laboratorium Konversi Energi Listrik Fakultas Teknik USU yang telah memberi izin riset di Laboratorium Konversi Energi Listrik.
7. Bapak Ir. Mustafrind Lubis, Ir. Rachman Hasibuan, Ir. Syarifuddin Siregar, Ir.Surya Tarmizi kasim,Msi, Ir.Masykur Sy dan Ir.Zulkarnaen Pane yang telah membantu penulis untuk menyelesaikan Tugas Akhir penulis.
8. Keluarga besar Laboratorium Konversi Energi Listrik: Abanganda Isroy Tanjung, ST, Muhammad Iqbal, Ferry R.A Bukit, Kribo(faisal), Ahmad Taufiq,bang eko dan M.Ardiansyah serta Seluruh staff pengajar dan Pegawai Departemen Teknik Elektro FT-USU.
9. Teristimewa kepada Bapak Khaldun M Badra yang tak pernah berhenti untuk mendukung saya baik motivasi dan materi agar bisa menyelesaikan Tugas Akhir ini dengan baik.
10. Buat Randi, Azhari, Nasir, Toni, Frans, M.Supen, rozi dan seluruh teman-teman saya di Departemen Teknik Elektro Stambuk 2006 yang tidak dapat di sebutkan satu persatu.
Penulis menyadari bahwa tulisan ini masih memiliki banyak kekurangan, oleh karena itu saran dan kritik sangat diperlukan dalam mengembangkan isi dari Tugas Akhir ini.
Semoga Tugas Akhir ini dapat bermanfaat bagi penulis pribadi dan juga semua pihak yang membutuhkan.
Medan, Agustus 2010 Penulis
ABSTRAK
Motor adalah mesin yang mengubah energi listrik menjadi energi mekanis. Pada motor arus searah energi listrik arus searah diubah menjadi energi mekanis. Dalam dunia industri, motor arus searah banyak digunakan sebagai penggerak pompa air, blower, hoist pada crane.
DAFTAR ISI
KATA PENGANTAR………i
ABSTRAK……….iv
DAFTAR ISI………..………v
DAFTAR TABEL………...…xii
DAFTAR GAMBAR………..xiii
BAB I PENDAHULUAN I.1 Latar Belakang……….…..…1
I.2 Tujuan dan Manfaat Penulisan………..…2
I.3 Batasan Masalah………2
I.4 Metode Penulisan………..3
I.5 Sistematika penulisan………4
BAB IIMOTOR ARUS SEARAH DAN POMPA SENTRIFUGAL II.1 MOTOR ARUS SEARAH...6
II.1.1 Umum...6
II.1.2 Konstruksi Motor Arus Searah...6
II.1.3 Prinsip kerja Motor Arus Searah...9
II.1.4 Reaksi Jangkar...12
II.1.4.1 Pergeseran Sikat (Brush Shifting) ...17
II.1.4.2 Penambahan kutub bantu (interpole) ...18
II.1.4.3 Belitan Kompensasi (Compensating Windings) ...19
II.1.5 Jenis-jenis Motor Arus Searah...20
II.1.5.1 Motor Arus Searah Penguatan Bebas...20
II.1.5.2.1 Motor Arus Searah Penguatan Seri...22
II.1.5.2.2 Motor Arus Searah Penguatan Shunt...23
II.1.6 Torsi dari Motor DC...24
II.1.6.1 Prinsip Dasar...24
II.1.6.2 Torsi jangkar dari Motor DC...25
II.1.6.3 Torsi Poros dari Motor DC...26
II.1.7 Pengaturan Kecepatan Pada Motor Arus Searah ...27
II.1.8 Karakteristik Motor Arus Searah Penguatan Shunt...29
II.1.8.1 Karakteristik Putaran – Arus Jangkar ( n/ Ia ) ...30
II.1.8.2 Karakteristik Torsi – Arus Jangkar ( T/ Ia ) ...32
II.1.8.3 Karakteristik Torsi – Putaran ( T/n ) ...32
II.2 POMPA SENTRIFUGAL...34
II.2.1 Umum...34
II.2.2 Bagian – Bagian Utama pada Pompa Sentrifugal...34
II.2.3 Prinsip Kerja Pompa Sentrifugal...36
II.2.4 Klasifikasi Pompa Sentrifugal...37
II.2.5 Head Pompa Sentrifugal...38
II.2.5.1 Head Tekanan ...40
II.2.5.2 Head Kecepatan ...41
II.2.5.3 Head Statis Total...41
II.2.5.4 Kerugian Head (Head Losses) ...42
II.2.5.4.1 Mayor head loss (mayor losses) ...42
II.2.5.4.2 Minor head loss (minor losses) ...44
II.2.6 Kecepatan Spesifik...45
II.2.7 Daya Pompa Sentrifugal...46
II.2.8 Torsi Pompa Sentrifugal...47
BAB III PERHITUNGAN PANAS PADA MOTOR DC PENGUATAN SHUNTAKIBAT KERJA TERUS MENERUS (CONTINUOUS DUTY) MULAI PADA SAAT START SAMPAI PENGEREMAN III.1 Kelas – kelas kerja dari suatu motor... ...48
III.2 Metode menentukan nilai momen inersia (J)...50
III.2.1 Metode Retardasi Dalam Menentukan Momen Inersia Motor DC (JM) ...50
III.2.1.1 Prinsip Dasar...50
III.2.1.2 Metode Pengukuran Momen Inersia Pada Jangkar (J) ...52
III.2.2 Menentukan Momen Inersia Kopling (JK) ...53
III.2.3 Menentukan Momen Inersia Pompa Sentrifugal (JP) ...53
III.3 Rugi – Rugi Motor Arus Searah Penguatan Shunt...54
III.3.1 Umum...54
III.3.2 Jenis Rugi – Rugi Di Dalam Motor Arus Searah...55
III.3.2.1 Rugi-Rugi Tembaga (Copper losses) ...55
III.3.2.2 Rugi-Rugi Inti (core or iron losses) ...55
III.3.2.3 Rugi-Rugi Mekanis (mechanical losses) ...58
III.3.2.4 Rugi – rugi sikat (brush losses) ...58
III.4 Metode Perhitungan Panas Pada Motor DC Penguatan Shunt Akibat
Continuous Duty Pada Saat start...60
III.4.1 Prinsip Dasar...60
III.4.2 Waktu Percepatan Pada Saat Start...61
III.4.3 Hubungan Energi (W) Selama Start...62
III.5 Metode Perhitungan Panas Pada Motor DC Penguatan Shunt Akibat Continuous Duty Pada Saat Keadaan Steady State...66
III.6 Metode Perhitungan Panas Pada Motor DC Penguatan Shunt Akibat Continuous Duty Pada Saat Pengereman. ...67
III.6.1 Prinsip Dasar...67
III.6.2 Hubungan Energi (W) Selama pengereman...69
BAB IV ANALISIS PERHITUNGAN PANAS PADA MOTOR DC PENGUATAN SHUNT AKIBAT KERJA TERUS MENERUS (CONTINUOUS DUTY) MULAI PADA SAAT START SAMPAI PENGEREMAN IV.1 Pengujian Motor DC Shunt dengan Metode Retardasi dan Pengukuran Tahanan Belitan Motor...72
IV.1.1 Umum...72
IV.1.2 Spesifikasi Motor...72
IV.1.3 Peralatan pengujian...72
IV.1.4 Prosedur Percobaan...73
IV.1.4.1 Uji Retardasi dengan Rotor Sendiri tanpa Eksitasi. ...74
IV.1.4.2 Uji Retardasi dengan Roda Pejal tanpa Eksitasi. ...75
IV.1.4.4 Uji Retardasi dengan Roda Pejal Eksitasi Penuh...76
IV.1.4.5 Pengukuran Tahanan Jangkar Motor...77
IV.1.4.6 Pengukuran Tahanan Medan Shunt Motor...78
IV.1.5 Data Hasil Pengujian...78
IV.1.6 Analisa Data Pengujian...80
IV.1.6.1 Perhitungan Momen Inersia Motor DC Shunt...80
IV.1.6.2 Perhitungan Rugi – Rugi Rotasi Motor DC Shunt...81
IV.2 Perhitungan Momen Inersia Kopling...82
IV.3 Perhitungan Momen Inersia Pompa Sentrifugal...82
IV.4 Metode Perencanaan Instalasi Pompa...83
IV.4.1 Umum...83
IV.4.2 Skema Instalasi Pompa yang Direncanakan...84
IV.4. Penentuan kapasitas...88
IV.4.4 Penentuan Head Pompa pada Instalasi...88
IV.4.4.1 Perbedaan Head Tekanan (ΔHP) ...89
IV.4.4.2 Perbedaan Head Kecepatan (ΔHV) ...89
IV.4.4.3 Perbedaan Head Statis (ΔHS) ...90
IV.4.4.4 Kerugian Head...90
IV.4.4.4.1 Kerugian Head sepanjang Pipa Isap (hIS) ...90
IV.4.4.4.2 Kerugian Head sepanjang Pipa Tekan (hId) ...94
IV.4.5 Perhitungan Motor Penggerak pada Pompa yang digunakan...97
IV.4.6 Putaran Spesifik dan Tipe Impeler...97
IV.4.7.1 Efisiensi Hidrolis...99
IV.4.7.2 Efisiensi Volumetris ...100
IV.4.7.3 Efisiensi Mekanis...101
IV.4.8 Daya Pompa Pada Instalasi Yang Dirancang ...102
IV.4.9 Torsi Pompa Pada Instalasi Yang Dirancang ...104
IV.4.10 Spesifikasi Pompa yang digunakan pada Instalasi...104
IV.4.11 Hasil Akhir dari Perancangan Instalasi Pompa Sentrifugal...106
IV.5 Karakteristik Operasi Motor DC Penguatan Shunt dan Pompa Sentrifugal...109
IV.5.1 Karakteristik Torsi Vs Putaran Motor DC Penguatan Shunt... 109
IV.5.1.1 Umum...109
IV.5.1.2 Spesifikasi Motor...109
IV.5.1.3 Peralatan Percobaan...110
IV.5.1.4 Rangkaian Percobaan...110
IV.5.1.5 Prosedur Percobaan...111
IV.5.1.6 Data Hasil Percobaan...112
IV.5.1.7 Kurva Karakteristik Torsi Vs Putaran Motor DC Shunt....112
IV.5.2 Karakteristik Torsi Vs Putaran Pompa Sentrifugal... 113
IV.5.2.1 Umum...113
IV.5.2.2 Spesifikasi Motor...113
IV.5.2.3 Peralatan Percobaan...113
IV.5.1.4 Rangkaian Percobaan...113
IV.5.2.5 Prosedur Percobaan...114
IV.5.2.6 Data Hasil Percobaan...115
IV.5.2 Kurva Karakteristik Operasi Motor DC Shunt Dengan Pompa
Sentrifugal...118
IV.6 Analisis Perhitungan Panas Pada Motor DC Penguatan Shunt Akibat Kerja Terus Menerus (Continuous Duty) Mulai pada saat Start sampai Pengereman...119
IV.6.1 Umum...119
IV.6.2 Spesifikasi Motor DC Shunt Dan Pompa Sentrifugal...121
IV.6.3 Peralatan Percobaan...122
IV.6.4 Rangkaian Percobaan...123
IV.6.5 Prosedur Percobaan...124
IV.6.6 Analisa Data Percobaan...125
IV.6.6.1 Perhitungan Panas Pada Motor DC Penguatan Shunt Akibat Kerja Terus Menerus (Continuous Duty) pada saat Start ...125
IV.6.6.2 Perhitungan Panas Pada Motor DC Penguatan Shunt Akibat Kerja Terus Menerus ( Continuous Duty ) pada keadaan steady sate...129
IV.6.6.3 Perhitungan Panas Pada Motor DC Penguatan Shunt Akibat Kerja Terus Menerus ( Continuous Duty ) pada keadaan Pengereman...132
BAB V KESIMPULAN DAN SARAN...135
V.1 Kesimpulan...135
V.2 Saran...136
DAFTAR TABEL
Tabel 2.1 Klasifikasi impeler menurut putaran spesifik...46
Tabel 4.1 Uji Retardasi dengan Rotor Sendiri tanpa Eksitasi...78
Tabel 4.2 Uji Retardasi dengan Roda Pejal tanpa Eksitasi...78
Tabel 4.4 Uji Retardasi dengan Roda Pejal Eksitasi penuh...79
Tabel 4.3 Uji Retardasi dengan Rotor sendiri Eksitasi penuh...79
Tabel 4.5 Pengukuran Tahanan Jangkar Motor...79
Tabel 4.6 Pengukuran Tahanan Medan Shunt Motor...79
Tabel 4.7 Kekasaran relative (
) dalam berbagai bahan pipa...91Tabel 4.8 Nilai Koefisien K untuk tipe Screwed...93
Tabel 4.9 Perhitungan diameter elbow dengan Koefisien Kerugian ( k ) pada pipa isap...93
Tabel 4.10 Perhitungan nilai koefisien kerugian akibat kelengkapan pipa isap....94
Tabel 4.11 Perhitungan diameter elbow dengan Koefisien Kerugian ( k ) pada pipa tekan...95
Tabel 4.12 Perhitungan nilai koefisien kerugian akibat kelengkapan pipa tekan...95
Tabel 4.13 Hubungan antara kecepatan spesifik dengan efisiensi hidrolis...99
Tabel 4.14 Perhitungan kecepatan spesifik dengan efisiensi hidrolis...100
Tabel 4.15 Hubungan antara kecepatan spesifik dengan efisiensi volumetris....101
Tabel 4.16 Hasil Pengujian Karakteristik Torsi Vs Putaran Motor DC Shunt....112
DAFTAR GAMBAR
Gambar 2.1 Konstruksi motor arus searah bagian stator...6
Gambar 2.2 Konstruksi motor arus searah bagian rotor...7
Gambar 2.3 Pengaruh penempatan konduktor pengalir arus dalam medan magnet...9
Gambar 2.4 Prinsip kerja motor arus searah...11
Gambar 2.5 Fluksi yang dihasilkan oleh kumparan medan...13
Gambar 2.6 Fluksi yang dihasilkan oleh kumparan jangkar...14
Gambar 2.7 Hasil kombinasi antara fluksi medan dan fluksi jangkar...14
Gambar 2.8 Kurva pemagnetan saat terjadi reaksi jangkar...16
Gambar 2.9 Pelemahan ggm akibat pergeseran bidang netral...18
Gambar 2.10 Motor DC yang dilengkapi dengan kutub bantu...19
Gambar 2.11 Rangkaian ekivalen motor arus searah penguatan bebas...20
Gambar 2.12 Rangkaian ekivalen motor arus searah penguatan seri...22
Gambar 2.13 Rangkaian ekivalen motor arus searah penguatan shunt...23
Gambar 2.14 Suatu pulley yang berputar karena mengalami suatu gaya...24
Gambar 2.15 Karakteristik Putaran – Arus Jangkar Pada Motor DC Shunt...31
Gambar 2.16 Karakteristik Torsi – Arus Jangkar Pada Motor DC Shunt...32
Gambar 2.17 Karakteristik Torsi – Putaran Pada Motor DC Shunt...33
Gambar 2.18 Pompa sentrifugal...34
Gambar 2.19 Gambar jenis – jenis Impeler...36
Gambar 2.20 Prinsip kerja dari pompa sentrifugal...37
Gambar 2.21 Skema Instalasi Pompa...39
Gambar 2.22 Jenis – jenis aliran dalam Pipa...44
Gambar 3.1 Diagram Aliran Daya pada Motor Arus Searah...54
Gambar 3.2 Perputaran jangkar di dalam motor dua kutub...56
Gambar 3.3 (a) Arus pusar di dalam inti jangkar yang padat (b) Arus pusar di dalam inti jangkar yang dilaminasi...57
Gambar 3.4 Start Motor Arus Searah penguatan Shunt secara langsung...61
Gambar 3.5 Rangkaian Pengereman Dinamik...67
Gambar 4.1 Roda Pejal...73
Gambar 4.3Rangkaian percobaan uji retardasi dengan rotor sendiri tanpa
eksitasi...74
Gambar 4.4 Rangkaian percobaan uji retardasi dengan roda pejal tanpa eksitasi...75
Gambar 4.5 Rangkaian percobaan uji retardasi dengan rotor sendiri eksitasi penuh...76
Gambar 4.6 Rangkaian percobaan uji retardasi dengan roda pejal eksitasi penuh...76
Gambar 4.7 Rangkaian percobaan pengukuran tahanan jangkar...77
Gambar 4.8 Rangkaian percobaan pengukuran tahanan medan shunt...78
Gambar 4.9 Skema Perencanaan Instalasi Pompa...86
Gambar 4.10 Dimensi skema perencanaan instalasi pompa...87
Gambar 4.11 Pompa Sentrifugal...105
Gambar 4.12 Instalasi Akhir Motor DC Shunt dengan Pompa Sentrifugal...106
Gambar 4.13 Tampak Depan Instalasi Motor DC Shunt dengan Pompa Sentrifugal...106
Gambar 4.14 Tampak Samping Kanan Instalasi Motor DC Shunt dengan Pompa Sentrifugal...107
Gambar 4.15 Tampak Samping Kiri Instalasi Motor DC Shunt dengan Pompa Sentrifugal...107
Gambar 4.16 Tangki Atas (Roof Tank)...108
Gambar 4.17 Tangki Bawah (Ground Tank)...108
Gambar 4.18 Rangkaian Percobaan Karakteristik Torsi Vs Putaran Motor DC Shunt...110
Gambar 4.19 Kurva karaktersitik Torsi Vs Putaran Motor DC Shunt...112
Gambar 4.20 Kurva karaktersitik Torsi Vs Putaran Pompa Sentrifugal...117
Gambar 4.21 Kurva karaktersitik operasi Motor DC Shunt dan Pompa Sentrifugal...118
Gambar 4.22 Proses Kerja Motor DC shunt dan Pompa Sentrifugal...119
Gambar 4.23 Stopwatch...122
Gambar 4.24 Meteran...123
BAB I
PENDAHULUAN
I.1 Latar Belakang
Dalam operasi dari sebuah motor ada ukuran dan ratingnya. Hal ini dipengaruhi pemanasan pada motor, kondisi beban dan kelas dari kerja, momen inertia dari beban dan kondisi sekeliling. Seperti kita ketahui panas dari sebuah mesin adalah fungsi dari rugi – rugi yang digambarkan sebagai panas.
Pada saat motor DC menerima daya masukan berupa energi listrik dan menghasilkan daya keluaran berupa energi mekanis, tidak seluruh daya masukan ke motor diubah menjadi daya keluaran yang berguna, selalu ada energi yang hilang selama proses pengkonversian energi tersebut. Energi yang hilang tersebut ada yang dikonversikan menjadi panas dan ada yang diserap oleh mesin untuk mengatasi gesekan karena adanya bagian yang berputar di dalam mesin. Rugi-rugi daya dalam bentuk panas ini jika nilainya terlalu besar akan dapat menyebabkan kenaikan temperatur motor yang dapat merusak isolasi dan mempercepat berkurangnya umur ekonomis motor sehingga membatasi daya keluaran motor
I.2 Tujuan dan Manfaat Penulisan
Adapun tujuan utama penulisan Tugas Akhir ini adalah :
1. Untuk mengetahui dan mempelajari secara nyata penggunaan dan pengaturan motor DC penguatan shunt
2. Menganalisa panas pada Motor DC penguatan Shunt akibat kerja terus menerus (continuous duty) mulai pada saat start, operasi normal (steady state) sampai pengereman.
Manfaat Penulisan adalah Memberikan informasi kepada penulis dan pembaca yang lain agar dapat mengetahui perhitungan panas dari Motor DC penguatan Shunt akibat kerja terus menerus (continous duty) mulai pada saat start sampai pengereman. Selain itu dapat pula digunakan sebagai bahan acuan guna pengembangan praktikum Mesin-mesin Listrik dan Konversi Energi Listrik di Laboratorium Konversi Energi Listrik FT – USU.
I.3 Batasan Masalah
Untuk mendapatkan hasil pembahasan yang maksimal, maka penulis perlu membatasi masalah yang akan dibahas. Adapun batasan masalah dalam Tugas Akhir ini adalah :
1. Kelas kerja motor yang digunakan adalah kelas kerja terus menerus dengan start dan pengereman
2. Tidak membahas pendinginan pada Motor DC Shunt 3. Tidak membahas pompa sentrifugal secara mendetail
5. Tidak membahas analisa karakteristik operasi Motor DC shunt dengan Pompa sentrifugal.
6. Pengatur tegangan yang digunakan dalam percobaan adalah pengatur tegangan bolak – balik (PTAC) yang akan disearahkan dengan dioda 3 phasa gelombang penuh sehingga menjadi tegangan DC sesuai yang dibutuhkan Motor DC Shunt.
I.4 Metode Penulisan
Karena Tugas Akhir ini merupakan suatu studi aplikasi, maka penulis mencari dan mengumpulkan bahan-bahan dan data-data yang diperlukan melalui :
1. Studi literature : mengambil bahan dari buku-buku referensi, jurnal dan sebagainya.
2. Penelitian : melakukan penelitian di laboratorium Konversi Energi Listrik Departemen Elektro FT-USU untuk mendapatkan data-data yang dibutuhkan selama penulisan tugas akhir ini.
I.5 Sistematika Penulisan
Tugas Akhir ini disusun berdasarkan sistematika pembahasan sebagai berikut:
BAB I : PENDAHULUAN
Bab ini merupakan pendahuluan yang berisikan tentang latar belakang masalah, tujuan penulisan, batasan masalah, manfaat penulisan, metode dan sistematika penulisan.
BAB II : MOTOR ARUS SEARAH DAN POMPA SENTRIFUGAL
Bab ini menjelaskan tentang motor arus searah secara umum, prinsip kerja motor arus searah, konstruksi motor arus searah, reaksi jangkar, jenis-jenis motor arus searah, pengaturan kecepatan pada motor arus searah penguatan shunt, karakteristik pada motor arus searah penguatan shunt. Dan pada pompa sentrifugal akan menjelaskan pompa secara umum, prinsip kerja pompa sentrifugal, bagian – bagian utama dari pompa sentrifugal, prinsip kerja, head pada pompa sentrifugal, kecepatan spesifik, putaran spesifik dan tipe impeler, daya pada pompa sentrifugal, torsi pada pompa sentrifugal.
BAB III :PERHITUNGAN PANAS PADA MOTOR DC PENGUATAN
SHUNT AKIBAT KERJA TERUS MENERUS (CONTINUOUS
DUTY) MULAI PADA SAAT START SAMPAI PENGEREMAN
penguatan shunt, metode perhitungan panas pada motor DC shunt akibat Continuous Duty pada saat start, steady state dan pengereman.
BAB IV : ANALISIS PERHITUNGAN PANAS PADA MOTOR DC
PENGUATAN SHUNT AKIBAT KERJA TERUS MENERUS
(CONTINUOUS DUTY) MULAI PADA SAAT START
SAMPAI PENGEREMAN.
Bab ini menjelaskan pengujian motor DC shunt dengan metode retardasi dan pengukuran tahanan belitan motor,perhitungan momen Inersia kopling, perhitungan momen inersia pompa sentrifugal, metode perencanaan instalasi pompa, karakteristik operasi motor DC penguatan shunt dan pompa sentrifugal, menghitung panas pada motor DC shunt akibat kerja terus menerus (continous duty) mulai pada saat start sampai pengereman.
BAB V : KESIMPULAN DAN SARAN
BAB II
MOTOR ARUS SEARAH DAN POMPA SENTRIFUGAL
II.1 MOTOR ARUS SEARAH
II.1.1 Umum
Motor arus searah (motor DC) adalah mesin yang mengubah energi listrik arus searah menjadi energi mekanis yang berupa putaran. Berdasarkan fisiknya motor arus searah secara umum terdiri atas bagian yang diam (stator) dan bagian yang berputar (rotor).
Motor arus searah bekerja berdasarkan prinsip interaksi antara dua fluksi magnetik. Dimana kumparan medan akan menghasilkan fluksi magnet yang arahnya dari kutub utara menuju kutub selatan dan kumparan jangkar akan menghasilkan fluksi magnet yang melingkar. Interaksi antara kedua fluksi magnet ini menimbulkan suatu gaya sehingga akan menimbulkan momen puntir atau torsi.
II.1.2 Konstruksi Motor Arus Searah
Gambar di bawah ini merupakan konstruksi motor arus searah.
Gambar 2.2 Konstruksi motor arus searah bagian rotor Keterangan dari gambar tersebut adalah :
1.Rangka atau gandar
Rangka motor arus searah adalah tempat meletakkan sebagian besar komponen mesin dan melindungi bagian mesin. Rangka juga berfungsi sebagai tempat mengalirkan fluksi magnet yang dihasilkan oleh kutub-kutub medan.
2. Kutub Medan
Kutub medan terdiri atas inti kutub dan sepatu kutub. Sepatu kutub yang berdekatan dengan celah udara dibuat lebih besar dari badan inti. Adapun fungsi dari sepatu kutub adalah :
a. Sebagai pendukung secara mekanis untuk kumparan medan
b. Menghasilkan distribusi fluksi yang lebih baik yang tersebar di seluruh jangkar dengan menggunakan permukaan yang melengkung.
3. Sikat
4. Kumparan Medan
Kumparan medan adalah susunan konduktor yang dibelitkan pada inti kutub. Rangkaian medan yang berfungsi untuk menghasilkan fluksi utama dibentuk dari kumparan pada setiap kutub. Pada aplikasinya rangkaian medan dapat dihubungkan dengan kumparan jangkar baik seri maupun paralel dan juga dihubungkan tersendiri langsung kepada sumber tegangan sesuai dengan jenis penguatan pada motor
5. Jangkar
Inti jangkar yang umumnya digunakan dalam motor arus searah adalah berbentuk silinder yang diberi alur-alur pada permukaannya untuk tempat melilitkan kumparan jangkar tempat terbentuknya ggl induksi. Inti jangkar terbuat dari bahan ferromagnetik.
6. Kumparan Jangkar
Kumparan jangkar pada motor arus searah merupakan tempat dibangkitkannya ggl induksi. Pada motor DC penguatan kompon panjang kumparan medan serinya diserikan terhadap kumparan jangkar, sedangkan pada motor DC penguatan kompon pendek kumparan medan serinya diparalel terhadap kumparan jangkar.
7. Komutator
terpasang pada poros. Di mana tiap-tiap lempengan atau segmen-segmen komutator terisolasi dengan baik antara satu sama lainnya.
8. Celah Udara
Celah udara merupakan ruang atau celah antara permukaan jangkar dengan permukaan sepatu kutub yang menyebabkan jangkar tidak bergesekan dengan sepatu kutub. Fungsi dari celah udara adalah sebagai tempat mengalirnya fluksi yang dihasilkan oleh kutub-kutub medan.
II.1.3 Prinsip kerja Motor Arus Searah
(a) (b)
(c)
H = l
I N
Lilitan ampere /meter...(2.1)
Di mana :
H = Kuat medan magnet (Lilitan ampere/meter) N = Banyak kumparan (Lilitan)
I = Arus yang mengalir pada penghantar (Ampere) l = Panjang dari penghantar (meter)
Pada gambar 2.3(a) menunjukkan sebuah medan magnet seragam yang dihasilkan oleh kutub-kutub magnet utara dan selatan yang arahnya dari kutub utara menuju kutub selatan. Sedangkan gambar 2.3(b) menggambarkan sebuah konduktor yang dialiri arus searah dan menghasilkan medan magnet (garis-garis gaya fluksi) disekelilingnya.
Prinsip dasar di atas diterapkan pada motor DC. Prinsip kerja sebuah motor arus searah dapat dijelaskan dengan gambar 2.4 berikut:
Gambar 2.4 Prinsip kerja motor arus searah
Jika arus jangkar (I) tegak lurus dengan arah induksi magnetik (B) maka besar gaya yang dihasilkan oleh arus yang mengalir pada konduktor jangkar yang ditempatkan dalam suatu medan magnet adalah :
F = B . I . l Newton………(2.2) Dimana :
I = Arus yang mengalir pada konduktor jangkar (Ampere) B = Kerapatan fluksi (Weber/m2)
l = Panjang konduktor jangkar (m)
Maka, besar gaya keseluruhan yang ditimbulkan oleh jumlah total konduktor jangkar z adalah :
F z.B.I..l Newton ………(2.3) Gaya yang terjadi pada kumparan jangkar di atas akan menghasilkan torsi yang besarnya adalah :
Ta F.r Newton-meter………(2.4) Maka, Ta z.B.I.l.d/2 Newton- meter…………(2.5)
Apabila torsi start lebih besar dari pada torsi beban maka jangkar akan berputar.
II.1.4 Reaksi Jangkar
Reaksi jangkar merupakan pengaruh medan magnet yang disebabkan oleh mengalirnya arus pada jangkar, di mana jangkar tersebut berada di dalam medan magnet. Reaksi jangkar menyebabkan terjadinya 2 hal, yaitu :
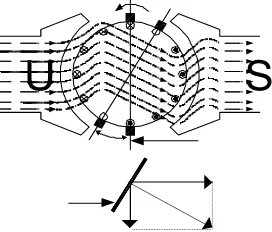
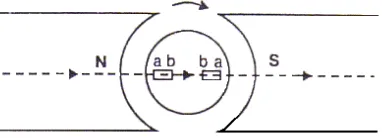
Apabila kumparan medan dialiri oleh arus tetapi kumparan jangkar tidak dialiri oleh arus, maka dengan mengabaikan pengaruh celah udara, jalur fluksi ideal untuk kutub utama dari motor arus searah dua kutub, berasal dari kutub utara menuju kutub selatan seperti pada gambar 2.5 berikut ini [ B.L.Theraja hal 605] :
Gambar 2.5 Fluksi yang dihasilkan oleh kumparan medan Dari gambar 2.5 dapat dijelaskan bahwa :
Fluksi didistribusikan simetris terhadap bidang netral magnetis.
Sikat ditempatkan bertepatan dengan bidang netral magnetis.
Bidang netral magnetis didefinisikan sebagai bidang di dalam motor di mana konduktor bergerak sejajar dengan garis gaya magnet sehingga gaya gerak listrik induksi konduktor pada bidang tersebut adalah nol. Seperti yang terlihat dari gambar 2.5 sikat selalu ditempatkan di sepanjang bidang netral magnetis. Oleh karena itu, bidang netral magnetis juga disebut sebagai sumbu komutasi karena pembalikan arah arus jangkar berada pada bidang tersebut. Vektor OFM mewakili besar dan arah dari fluksi medan utama, di mana vektor ini tegak lurus terhadap bidang netral magnetis.
Sewaktu hanya konduktor jangkar saja yang dialiri oleh arus listrik sementara kumparan medan tidak dieksitasi, maka disekeliling konduktor jangkar
U
S
O M
Bidang Netral Magnetis
Sikat
timbul ggm atau fluksi. Gambaran arah garis gaya magnet ditunjukkan pada gambar 2.6 berikut ini [ B.L.Theraja hal 606] :
Gambar 2.6 Fluksi yang dihasilkan oleh kumparan jangkar
[image:30.595.244.380.562.678.2]Penentuan arah dari garis gaya magnet yang diakibatkan oleh arus jangkar ditentukan dengan aturan putaran sekrup (cork-screw rule). Besar dan arah garis gaya magnet tersebut diwakili oleh vektor OFA yang sejajar dengan bidang netral magnetis. Pada prakteknya, sewaktu mesin beroperasi maka konduktor jangkar dan konduktor medan sama- sama dialiri oleh arus listrik, distribusi fluksi resultan diperoleh dari menggabungkan kedua fluksi tersebut. Oleh karena itu distribusi fluksi medan utama yang melalui jangkar tidak lagi simetris tetapi sudah mengalami pembelokan saat mendekati konduktor yang dialiri arus tersebut. Hal tersebut dikarenakan pengaruh fluksi jangkar yang dapat dilihat dari gambar 2.7 berikut ini [ B.L.Theraja hal 606] :
Gambar 2.7 Hasil kombinasi antara fluksi medan dan fluksi jangkar
U
S
Bidang Netral Magnetis
O
A
Fluksi yang dihasilkan oleh gaya gerak magnet (ggm) jangkar menentang fluksi medan utama pada setengah bagian dari salah satu kutubnya dan memperkuat fluksi medan utama pada setengah bagian yang lain. Hal ini jelas akan menyebabkan penurunan kerapatan fluksi pada setengah bagian dari salah satu kutubnya dan terjadi kenaikan pada setengah bagian yang lain di kutub yang sama. Efek dari intensitas medan magnet atau lintasan fluksi pada jangkar yang memotong lintasan fluksi medan utama ini disebut sebagai reaksi jangkar magnetisasi-silang (cross-magnetization).
Magnetisasi-silang ini juga menyebabkan pergeseran bidang netral. Pada Gambar 2.7 terlihat bahwa vektor OFr merupakan resultan vektor OFA dan OFM, serta posisi bidang netral magnetis yang baru, di mana selalu tegak lurus terhadap vektor OFr. Bidang netral magnetis motor yang baru bergeser sejauh karena posisi bidang netral magnetis ini selalu tegak lurus terhadap vektor OF. Dengan pergeseran bidang netral ini maka sikat juga akan bergeser sejauh pergeseran bidang netral magnetis. Hal ini dapat menimbulkan bunga api di segmen komutator dekat sikat.
Gambar 2.8 Kurva pemagnetan saat terjadi reaksi jangkar
Misalkan fluks sebesar Ox adalah fluksi dihasilkan medan utama tanpa dipengaruh reaksi jangkar. Misalkan pula dengan adanya reaksi jangkar pertambahan-pengurangan kuat medan magnet (ggm) yang terjadi pada kutub medan sebesar B ampere-lilitan. Pada lokasi di permukaan kutub di mana gaya gerak magnet (ggm) rotor menambahkan ggm kutub terjadi penambahan kerapatan fluks sebesar xy. Sedangkan pada lokasi permukaan kutub di mana ggm rotor mengeliminir ggm kutub terjadi penurunan kerapatan fluksi sebesar xz, di mana harga xz lebih besar dari pada xy. Oleh karena itu, penjumlahan rata-rata kerapatan fluks yang terjadi adalah kerapatan fluks kutub yang semakin berkurang. Hal inilah yang disebut sebagai efek demagnetisasi reaksi jangkar dan perlu dicatat bahwa demagnetisasi timbul hanya karena adanya saturasi magnetik.Untuk mengatasi reaksi jangkar ada tiga cara yang dapat dilakukan, yaitu
O
Φ
ggm z
x y
II.1.4.1 Pergeseran Sikat (Brush Shifting)
Ide dasarnya adalah dengan memindahkan sikat seirama dengan perpindahan bidang netral untuk menghindari percikan bunga api yang timbul. Namun dalam penerapannya hal ini cukup sulit karena jarak perpindahan bidang netralnya sangat ditentukan oleh besarnya beban yang dipikul, maka jarak perpindahan bidang netralnya pun berpindah, sehingga sikat harus juga diubah setiap saat, seirama dengan perubahan jarak perpindahan bidang netral. Selain itu pergeseran sikat akan memperburuk melemahnya fluks akibat reaksi jangkar mesin, selain dengan metode ini mesin arus searah tidak dimungkinkan untuk bekerja sebagai generator (akan menimbulkan percikan api yang lebih besar), dan sangat tidak ekonomis terutama untuk mesin-mesin berukuran kecil.
(a) (b)
Gambar 2.9 Pelemahan ggm akibat pergeseran bidang netral
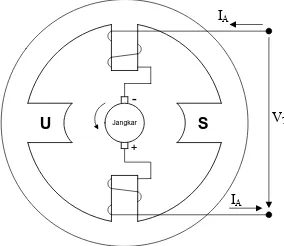
II.1.4.2 Penambahan kutub bantu (interpole)
Ide dasar penambahan kutub bantu (interpole) yaitu jika tegangan pada kawat-kawat yang sedang melakukan proses komutasi penyearahan dibuat nol, maka tidak akan terdapat percikan bunga api pada sikat-sikat mesin tersebut. Untuk itu, kutub-kutub kecil yang disebut kutub komutasi ditempatkan ditengah-tengah diantara kutub-kutub utama. Interpole ini dihubungkan seri terhadap kumparan rotor. Sehingga dengan adanya fluks dari interpole ini akan dapat mencegah/mengurangi adanya tegangan yang muncul pada kawat-kawat yang sedang melakukan proses komutasi.
Jangkar
U S
-+
IA
[image:35.595.238.380.87.210.2]IA VT
Gambar 2.10 Motor DC yang dilengkapi dengan kutub bantu
II.1.4.3 Belitan Kompensasi (Compensating Windings)
Belitan kompensasi ini dihubungkan seri terhadap kumparan, rotor belitan ini bertujuan untuk mengurangi penyimpangan yang timbul akibat reaksi jangkar. Fluks yang ditimbulkan oleh reaksi jangkar diimbangi oleh fluks yang ditimbulkan oleh belitan kompensasi yang besarnya sama dan berlawanan. Ketika beban berubah, maka reaksi jangkar yang berubah akan selalu diimbangi oleh fluks belitan kompensasi, sehingga bidang netralnya tidak bergeser.
II.1.5 Jenis-jenis Motor Arus Searah
Jenis-jenis motor arus searah dapat dibedakan berdasarkan jenis penguatannya, yaitu hubungan rangkaian kumparan medan dengan kumparan jangkar. Sehingga motor arus searah dibedakan menjadi :
1. Motor arus searah penguatan bebas 2. Motor arus searah penguatan sendiri
II.1.5.1 Motor Arus Searah Penguatan Bebas
Motor arus searah penguatan bebas adalah motor arus searah yang sumber tegangan penguatannya berasal dari luar motor. Di mana kumparan medan disuplai dari sumber tegangan DC tersendiri. Rangkaian ekivalen motor arus searah penguatan bebas dapat dilihat pada gambar di bawah ini:
+
-E a R
a Vf
V t
Ia I
f
+
-Rf
Gambar 2.11 Rangkaian ekivalen motor arus searah penguatan bebas Dari rangkaian tersebut berdasarkan hukum Kirchoff tentang tegangan diperoleh persamaan:
Vt = Ea + Ia.Ra + Vsikat ………..(2.6) Vf = If . Rf ……….……….…..(2.7) Dimana:
Vf = tegangan terminal medan penguatan bebas (volt) Rf = tahanan medan penguatan bebas (ohm)
Ea = gaya gerak listrik motor arus searah (volt) Vsikat = jatuh tegangan pada sikat (volt)
Umumnya jatuh tegangan pada sikat relatif kecil sehingga besarnya dapat diabaikan. Dan untuk rumus selanjutnya Vsikat ini diabaikan.
II.1.5.2 Motor Arus Searah Penguatan Sendiri
Motor arus searah penguatan sendiri adalah motor arus searah yang sumber tegangan penguatannya berasal dari motor itu sendiri. Dimana kumparan medan berhubungan langsung dengan kumparan jangkar. Kumparan medan dapat dihubungkan secara seri maupun paralel dengan kumparan jangkar. Dan juga dapat dihubungkan dengan keduanya,yaitu secara seri dan paralel, tergantung pada jenis penguatan yang diberikan terhadap motor.
Motor arus searah penguatan sendiri terdiri atas: 1. Motor arus searah penguatan seri
2. Motor arus searah penguatan shunt
II.1.5.2.1 Motor Arus Searah Penguatan Seri
Rangkaian ekivalen motor arus searah penguatan seri adalah sebagai berikut:
Rs
Vt
+
-Ea Ra
Ia IL
+
[image:38.595.221.407.172.305.2]
-IS
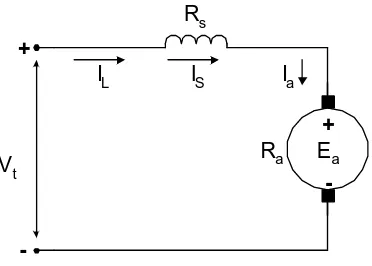
Gambar 2.12 Rangkaian ekivalen motor arus searah penguatan seri
Pada motor arus searah penguatan seri, kumparan medan dihubungkan secara seri dengan rangkaian jangkar. Oleh sebab itu arus yang mengalir pada kumparan medan seri sama dengan arus yang mengalir pada kumparan jangkar. Persamaan - persamaan yang berlaku pada motor arus searah penguatan seri adalah:
Vt = Ea + Is.Rs + Ia. Ra ………..(2.8) Karena, IL= Ia = Is
Maka Vt = Ea + Ia (Ra + Rs) ………(2.9) Dimana :
Is = arus kumparan medan seri (Ampere) Rs = tahanan medan seri (ohm)
II.1.5.2.2 Motor Arus Searah Penguatan Shunt
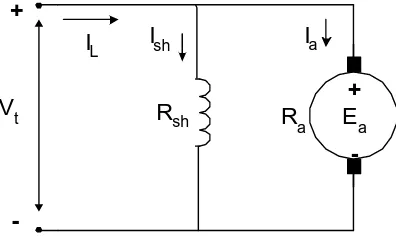
[image:39.595.231.429.171.290.2]Rangkaian ekivalen motor arus searah penguatan shunt ditunjukkan pada gambar di bawah:
+
-Vt E
a
Ra Ia IL
+
-Rsh Ish
Gambar 2.13 Rangkaian ekivalen motor arus searah penguatan shunt Pada motor shunt kumparan jangkar dihubungkan langsung pada terminal sehingga paralel dengan kumparan jangkar.
Persamaan - persamaan yang berlaku pada motor shunt adalah:
Vt = Ea + Ia.Ra ………(2.10)
sh
I =
sh t
R V
……….………(2.11)
IL = Ia + Ish ………...…(2.12) Dimana :
II.1.6 Torsi dari Motor DC
II.1.6.1 Prinsip Dasar
Torsi adalah putaran atau pemuntiran dari suatu gaya terhadap suatu poros. Ini diukur dengan hasil kali gaya itu dengan jari – jari lingkaran dimana gaya tersebut bekerja. Gambar dibawah ini menunjukkan suatu pulley dengan jari – jari r bekerja suatu gaya F newton yang menyebabkan benda berputar dengan kecepatan n putaran per detik.
Torsi = F x r Newton – meter (N-m).
Usaha yang dilakukan oleh gaya tersebut pada suatu putaran [ B.L. Theraja hal.666 ] :
= gaya x jarak
= F x 2 r Joule ………...…(2.13)
Gambar 2.14 Suatu pulley yang berputar karena mengalami suatu gaya Daya yang dibangkitkan adalah,
= F x 2 r x n Joule/detik
= (F x r) 2 n Joule/detik ……….…(2.14) Jika : 2 n = kecepatan sudut ()dalam rad/detik
F x r = torsi T, maka daya yang dibangkitkan = T x Joule/detik
II.1.6.2 Torsi jangkar dari Motor DC
Di dalam motor DC, setiap konduktor di bagian permukaan jangkar akan mengalami gaya F pada suatu jarak r yang merupakan jari jari jangkar. Dengan demikian, masing – masing konduktor menghasilkan suatu torsi yang cenderung untuk memutar. Jumlah seluruh torsi yang dihasilkan oleh konduktor jangkar dikenal dengan torsi jangkar (Ta). Jika pada suatu motor DC :
r = rata – rata jari – jari jangkar dalam meter
l = panjang efektif masing – masing konduktor dalam meter
Z = jumlah total konduktor jangkar
i = arus dalam setiap konduktor = Ia/A dalam ampere B = rapat fluks rata- rata dalam weber/meter2
= fluks per kutub dalam weber
P = jumlah kutub
Maka gaya pada setiap konduktor, F = B i l ………...….…(2.16) Torsi yang dihasilkanoleh suatu konduktor = F x r Newton-meter
Torsi jangkar, Ta = Z F r Newton-meter
Ta = Z B i l Newton-meter (2.17) Sekarang i = Ia/A, B = /a dimana a adalah luas penampang jalur fluks per kutub
pada jari – jari r. jelasnya, a = 2 r p 1
Maka Ta = Z x lxr A I a
a ( ) )
( ….(2.18)
= Z x lxr
A I a
= A P I Z a
2 N-m
Atau Ta = 0,159 ( )
A P
ZIa Nm….(2.19)
Karena Z, P dan A nilainya selalu tetap, maka : Ta ~ Ia
Karena itu torsi didalam motor DC berbanding langsung dengan fluks per kutub dan arus jangkar. Untuk motor DC shunt, besarnya fluks relative konstan sehingga :
Ta ~ Ia...…...(2.20) Ekspresi lainnya untuk menyatakan besarnya torsi jangkar yaitu :
Ea = A zn P 60 ...….(2.21) A zn P = n Ea 60
Dari persamaan (2.35) di atas diperoleh persamaan untuk Ta yaitu [ B.L. Theraja hal 667 ] :
Ta = 0,159 x
n Ea 60 x Ia
Atau Ta = 9,55 x
n I Ea a
N-m...(2.22)
II.1.6.3 Torsi Poros dari Motor DC
poros karena sebagiannya hilang untuk mengatasi rugi – rugi besi dan gesek didalam motor. Dengan demikian, torsi poros Tsh lebih kecil nilainya dibandingkan torsi jangkar Ta. Selisih Ta - Tsh disebut rugi – rugi torsi (torque losses).
Jelasnya, Ta - Tsh = 9,55 x
n
gesek rugibesi
Rugi
...(2.23)
Tsh dapat dihitung dengan cara sebagai berikut [ B.L. Theraja hal 667 ]: Daya keluaran dalam Watt ( Pout ) = Pin - ∑ rugi - rugi
Sehingga Tsh =
60 / 2 Watt dalam keluaran Daya n
N-m
Atau Tsh=
n Watt dalam keluaran Daya 55 ,
9 N-m...(2.24)
II.1.7 Pengaturan Kecepatan Pada Motor Arus Searah
Sebagaimana telah diketahui bahwa di dalam motor DC berlaku persamaan [ V.K dan Rohit Mehta hal 337] :
Ea = Vt – IaRa Dimana Ea =
A 60 n Z P Sehingga A 60 n Z P
= Vt – IaRa...(2.25)
Atau n =
PZ A R I
Vt a a 60
Atau n = K
a a t I RV
di mana K = PZ
A 60
...(2.26)
Maka n = K
a
E
Atau n ~
a
E
...(2.27) Dimana : T = torsi (Newton – meter)
K = konstanta (bergantung pada ukuran fisik motor) = fluksi setiap kutub (Weber)
a
I = arus jangkar (Ampere) P = jumlah kutub
Z = jumlah konduktor A = cabang paralel
Dengan demikian di dalam motor DC , kecepatan berbanding lurus dengan GGL balik Ea dan berbanding terbalik dengan fluks per kutub Φ.
Umumnya pada setiap motor, torsi dan kecepatan merupakan faktor yang sangat penting. Ketika torsi meningkat, kecepatan motor akan berkurang dan sebaliknya. Telah diketahui bahwa untuk motor DC berlaku [ B.L.Theraja hal 691] :
n = K
a a t IR
V
= K
a
E
Ta ~ Ia
motor. Kelebihan torsi tersebut menyebabkan motor mengalami percepatan dan GGL balik juga meningkat. Kecepatan motor yang stabil akhirnya dicapai ketika GGL balik telah telah meningkat sampai ke suatu nilai dimana arus jangkar
Ia Vt Ea /Ra
dapat membangkitkan torsi yang cukup untuk memikulbeban.
II.1.8 Karakteristik Motor Arus SearahPenguatan Shunt
Karakteristik dari suatu motor layak diketahui, karena karakteristik dari suatu motor akan mencerminkan performansi (unjuk kerja) dari motor listrik tersebut selama kondisi operasinya. Pada motor arus searah penguatan shunt terdapat tiga karakteristik yakni antara lain: Karakteristik Torsi dan Arus Jangkar, Karakteristik Putaran dan Arus Jangkar, dan Karakteristik Torsi dan Putaran. Persamaan dasar motor DC adalah
m m a a ZP a ZP E 2 2 .
Ea Kam
a ZP Ka 2
Sebagaimana telah diketahui
a a
m
e E I
T 1 .
a e I a ZnP n T . 2 1 a e I a PZ T . .
2
a a
e K I
Pada motor DC emf yang timbul dalam jangkar dinamakan back emf atau counter emf. Untuk motor DC, tegangan sumber atau suplai selalu tetap.
Pada motor DC shunt untuk tegangan suplai konstant maka If juga konstant. Pada Arus Jangkar Ia yang kecil pengaruh demagnetisasi dari reaksi jangkar biasanya dapat diabaikan sehingga besar fluksi pada celah udara tidak terpengaruh. Untuk Ia yang besar pengaruh demagnetisasi dari reaksi jangkar akan mengurangi besar fluksi celah udara sedikit.
a a m K E a a t a V I R E
a a a t m K R I V ...(2.28)
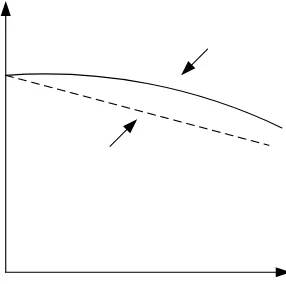
II.1.8.1 Karakteristik Putaran – Arus Jangkar ( n/ Ia )
Untuk Motor Arus Searah berlaku : Ea = Vt - IaRa
Dimana Ea = Ka.. Maka Ka.. = Vt - IaRa Dimana ≈ If
Dengan harga If yang konstan maka Ka, , Vt dan Ra merupakan konstanta sehingga diperoleh a a a t m K R I V
reaksi jangkar. Dengan bertambahnya Ia, maka pengaruh dari demagnetisasi reaksi jangkar akan bertambah besar yang akan berkurangnya besar fluksi medan penguatan maka kecepatan motor akan bertambah besar. Tetapi dengan bertambahnya Ia, maka besar IaRa akan bertambah sehingga besar Vt - IaRa akan berkurang, akibatnya terjadi pengurangan besar fluksi medan maka putaran motor DC shunt akan berkurang, dengan bertambah besarnya Ia akan jatuh (berkurang) sedikit dari mo = kecepatan putaran pada beban nol. Karena pada beban nol Ia sama dengan kecil sekali,maka :
a t m
K V
0 ...(2.29)
Dan pada kasus bila pengaruh reaksi jangkar diabaikan maka :
a a a t m
K R I
V
...(2.30)
[image:47.595.244.387.474.616.2]Diperoleh : Ka. = konstan, sehingga kecepatan putaran motor akan jatuh lebih cepat dengan bertambahnya Ia [ P.S. Bimbhra hal 471].
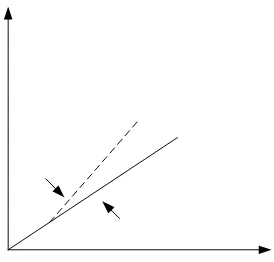
II.1.8.2 Karakteristik Torsi – Arus Jangkar ( T/ Ia )
[image:48.595.248.385.291.422.2]Dari rumus Te = Ka.. Ia menunjukkan jika fluksi adalah konstan (pada motor DC shunt), maka besar torsi akan bertambah secara linear dengan bertambahnya Ia. Tetapi bila Ia bertambah maka besar fluksi akan berkurang karena pengaruh demagnetisasi dari reaksi jangkar sehingga kurva karakteristik Torsi – Arus jangkar akan bias atau mengalami pembelokan dari kurva garis lurus [P.S. Bimbhra hal 471] :
Gambar 2.16 Karakteristik Torsi – Arus Jangkar Pada Motor DC Shunt
II.1.8.3 Karakteristik Torsi – Putaran ( T/n )
Karakteristik putaran torsi disebut juga sebagai karakteristik mekanik dan pada kondisi steady state (nominal) dapat diperoleh sebagai berikut :
a a m
K E
sedangkan Ea Vt IaRa
Maka
a a a t m
K R I
V
...(2.31)
Tetapi Te Ka..Ia sehingga
a
e a
K T
I
a a a t m K R I V Sehingga a a e t a m K R T V K 1 2 2 a e a a t m K T R K V 2 2 0 a e a m m K T R ...(2.32)
Maka dapat dilihat dengan pertambahan Te kecepatan putaran akan turun. Sehingga untuk Te lebih besar, Ia lebih besar dibutuhkan, sehingga akan mengurangi besar fluksi celah udara () yang disebabkan karena kejenuhan
dan reaksi jangkar. Maka dengan Te bertambah maka akan berkurang. 2
e
T
bertambah dengan perbandingan yang lebih cepat dan putaran dari motor akan turun lebih cepat dibandingkan dengan kenaikan torsi mesin seperti diperlihatkan gambar di bawah ini. Jika pengaruh reaksi jangkar diabaikan maka (Ka.)2 nilainya konstan sehingga kecepatan putaran akan berkurang dengan lambat seiring Pertambahan Te [P.S. Bimbhra hal 471]:
II.2 POMPA SENTRIFUGAL
II.2.1 Umum
Pompa adalah suatu alat yang digunakan untuk memindahkan zat cair dari tempat yang rendah ke tempat yang lebih tinggi dengan cara menaikkan tekanan cairan tersebut. Kenaikan tekanan cairan digunakan untuk mengatasi hambatan-hambatan pengaliran berupa perbedaan tekanan, ketinggian atau hambatan-hambatan gesek. Gaya sentrifugal adalah sebuah gaya yang timbul akibat adanya gerakan sebuah benda atau partikel melalui lintasan lengkung (melingkar). Maka, pompa sentrifugal adalah suatu pompa kerja dinamis yang menggunakan impeller yang berputar untuk meningkatkan tekanan fluida.
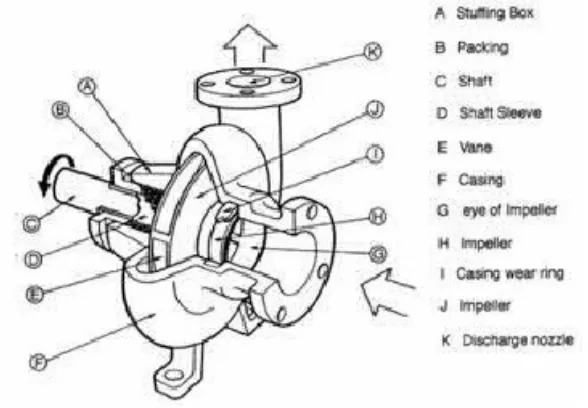
II.2.2 Bagian – Bagian Utama pada Pompa Sentrifugal
[image:50.595.166.460.466.670.2]Secara umum bagian – bagian utama dari pompa sentrifugal dapat dilihat seperti gambar berikut [ Pompa A hal 32] :.
A. Stuffing Box
Stuffing Box berfungsi untuk mencegah kebocoran pada daerah dimana poros pompa menembus casing.
B. Packing
Digunakan untuk mencegah dan mengurangi bocoran cairan dari casing pompa melalui poros.
C. Shaft (poros)
Poros berfungsi untuk meneruskan momen puntir dari penggerak selama beroperasi dan tempat kedudukan impeller dan bagian-bagian berputar lainnya. D. Shaft sleeve
Shaft sleeve berfungsi untuk melindungi poros dari erosi, korosi dan keausan pada stuffing box.
E. Vane
Sudu dari impeller sebagai tempat berlalunya cairan pada impeller. F. Casing
Merupakan bagian paling luar dari pompa yang berfungsi sebagai pelindung elemen yang berputar, tempat kedudukan diffusor, inlet dan outlet nozel serta tempat memberikan arah aliran dari impeller dan mengkonversikan energi kecepatan cairan menjadi energi dinamis.
G. Eye of Impeller
Bagian sisi masuk pada arah isap impeller. H. Impeller
energi fluida Impeller berfungsi untuk mengubah energi mekanis dari pompa menjadi energi kecepatan pada cairan yang dipompakan secara kontinu sehingga dapat mengangkat zat cair dari tempat yang lebih rendah ke tempat yang lebih tinggi. Impeller terdiri dari beberapa pisau (blade) biasanya melengkung disebut sudu (vanes) yang dipasang dengan pola yang teratur disekeliling poros. Pada umumnya terdapat 2 impeller yaitu [Bruce R.Munson hal 694] :
(a) Impeller Terbuka (b) Impeller Tertutup
Gambar 2.19 Gambar jenis – jenis impeler I. Wearing Ring
Wearing ring berfungsi untuk memperkecil kebocoran cairan yang melewati bagian depan impeller maupun bagian belakang impeller.
J. Bearing
Bearing (bantalan) berfungsi untuk menumpu dan menahan beban dari poros agar dapat berputar, baik berupa beban radial maupun beban axial.
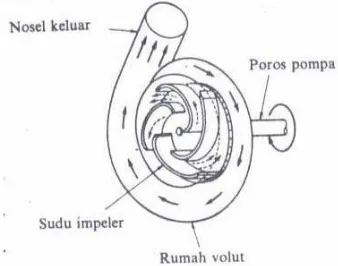
II.2.3 Prinsip Kerja Pompa Sentrifugal
putaran impeler yang menimbulkan gaya sentrifugal makazat cair mengalir dari tengah impeller menuju keliling luar sudu melalui saluran diantara sudu – sudu dan meninggalkan impeler dengan kecepatan yang tinggi sehingga head tekanan zat cair menjadi lebih tinggi dan head kecepatannya bertambah besar karena zat cair mengalami percepatan.
[image:53.595.223.392.391.524.2]Zat cair yang keluar dari impeler dengan kecepatan tinggi akan melalui saluran yang penampangnya semakin membesar yang disebut volute (cangkang keong) di keliling impeller dan disalurkan ke luar pompa melalui nosel. Kapasitas yang di hasilkan oleh pompa sentrifugal adalah sebanding dengan putaran, sedangkan total head (tekanan) yang dihasilkan oleh pompa sentrifugal adalah sebanding dengan pangkat dua dari kecepatan putaran [ Sularso hal 4] :
Gambar 2.20 Prinsip kerja dari pompa sentrifugal
II.2.4 Klasifikasi Pompa Sentrifugal
Pompa sentrifugal dapat diklasifikasikan menjadi beberapa macam [ Pompa A hal.23]:
1. Menurut kapasitas :
2. Menurut tekanan yang dihasilkan :
a. Tekanan rendah (<5 kg/cm2) b.Tekanan menengah (5 – 50kg/cm2) c. Tekanan tinggi (>50kg/cm2)
3. Menurut kecepatan spesifik :
a. Kecepatan rendah b. Kecepatan menengah c. Kecepatan tinggi d. Pompa aliran campur e. Pompa aliran aksial
4. Menurut jumlah impeler dengan tingkatannya : a. Pompa dengan impeler tunggal.
b. Pompa dengan impeler banyak. 5. Menurut sisi masuk impeler :
a. Pompa isapan tunggal (single suction) b. Pompa isapan ganda (double suction)
II.2.5 Head Pompa Sentrifugal
Head pompa adalah besarnya energi yang diperlukan pompa untuk memindahkan ataupun mengalirkan fluida dari keadaan awal menuju keadaan akhir yang direncanakan sesuai dengan kondisi instalasi pompa yang umumnya dinyatakan dalam satuan panjang.
yaitu energi tekanan, energi kinetik, eneri potensial. Hal ini dapat dinyatakan dengan rumus sebagai berikut [pompa A hal 34]:
g V Z P H 2 2 ...(2.33)
Dimana : H = Head total pompa (m)
P
= Head tekanan (m)
Z = Head statis total (m)
g V 2
2
= Head kecepatan (m)
Karena energi itu kekal, maka bentuk head (tinggi tekan) dapat bervariasi pada penampang yang berbeda. Namun pada kenyataannya selalu ada rugi energi (losses) yang dinamakan sebagai head losses (HL).
Gambar 2.21 Skema Instalasi Pompa
Pada kondisi yang berbeda seperti pada gambar (2.21) diatas maka persamaan Bernoulli adalah sebagai berikut :
L B B B B A A A
A Z H
g V P H Z g V P 2 2 2 2
( losses dari A ke B)
Karena
A
B maka :
B A
LA B A
B Z Z H
g V V P
P
H
2 2 2 L ST H H g V P
H
2 2
Dimana : H = Head total pompa (m)
P
= Head pompa karena perbedaan tekanan pada sisi isap
dengan sisi tekan (m)
g V 2
2
= Head pompa karena ada perbedaan kecepatan (m)
HST = Head statis = ZB - ZA (m) HL = Head losses dari A ke B (m)
II.2.5.1 Head Tekanan
Head tekanan adalah perbedaan head tekanan yang bekerja pada permukaan zat cair pada sisi tekan dengan head tekanan yang bekerja pada permukaan zat cair pada sisi isap. Head tekanan dapat dinyatakan dengan rumus [pompa A hal 36] :
B AP P P ...(2.34) Dimana : P
= Head tekanan (m)
B
P
AP
= Head tekanan pada permukaan zat cair pada sisi isap (m)
= Berat jenis fluida (kN/m3)II.2.5.2 Head Kecepatan
Head kecepatan adalah perbedaan antar head kecepatan zat cair pada saluran tekan dengan head kecepatan zat cair pada saluran isap. Head kecepatan dapat dinyatakan dengan rumus [pompa A hal 36] :
HV =
g V g
VB A 2 2
2 2
...(2.35)
Dimana : HV = Head kecepatan (m)
g VB
2
2
= Head kecepatan zat cair pada saluran tekan (m)
g VA
2
2
= Head kecepatan zat cair pada saluran isap (m)
g = Percepatan gravitasi (m/s2)
II.2.5.3 Head Statis Total
Head statis total adalah perbedaan tinggi antara permukaan zat cair pada sisi tekan dengan permukaan zat cair pada sisi isap. Head statis total dapat dinyatakan dengan rumus [pompa A hal 36] :
Z = ZB - ZA...(2.36) Dimana : Z : Head statis total (m)
Tanda + : Jika permukaan zat cair pada sisi isap lebih rendah dari sumbu pompa Tanda - : Jika permukaan zat cair pada sisi isap lebih tinggi dari sumbu pompa
II.2.5.4 Kerugian Head (Head Losses)
Kerugian energi per satuan berat fluida dalam pengaliran cairan dalam sistem perpipaan disebut sebagai kerugian head (head losses). Head losses terdiri dari mayor head losses (hf), minor head losses (hm) dan total losses (htot)
II.2.5.4.1 Mayor head loss (mayor losses)
Rugi – rugi mayor adalah rugi – rugi energi yang disebabkan oleh adanya gesekan – gesekan antara aliran fluida dan dinding pipa yang besarnya rugi – rugi ini sangat dipengaruhi oleh panjang pipa. Rugi – rugi di sepanjang pipa ini dapat dirumuskan sebagai berikut [ Sularso hal 28 ] :
g V D
L f hf
2 2
...(2.37)
Dimana : hf = Mayor losses (m) f = Faktor gesekan L = Panjang pipa (m)
V = Kecepatan rata – rata cairan dalam pipa (m/s) D = Diameter dalam pipa (m)
Persamaan diagram moody [Bruce R. Munson hal 432] :
D
f Re, ...(2.38)
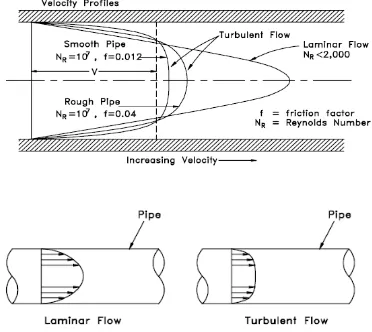
Besarnya bilangan Reynolds dapat dilihat dari jenis aliran dalam pipa. Aliran dalam pipa dapat dibagi menjadi dua jenis bagian yaitu aliran laminar dan aliran turbulen. Aliran di dalam pipa ini sangat dipengaruhi oleh kecepatan, viskositas kinematis atau jenis fluida itu sendiri juga dipengaruhi oleh diameter pipa. Untuk menentukan jenis aliran yang terjadi digunakan harga bilangan reynold tersebut. Untuk mendapatkan harga bilangan reynold dapat digunakan persamaan sebagai berikut [ Sularso hal 42] :
Re =
VD ...(2.39)
Dimana :
= Viskositas kinematik zat cair (m2/s),
=
...(2.40)
Sehingga Re :
VD
Re ...(2.41)
Dimana : Re = Reynolds number = densitas cairan (kg/m3)
V = Kecepatan rata – rata aliran (m/s) D = Diameter dalam pipa (m)
= viskositas dinamik dalam cairan (N-s/m2)
Apabila aliran laminer (Re < 2300), faktor gesekan (f) dapat dicari dengan pendekatan rumus [ Sularso hal 29] :
Re
64
Dan apabila aliran turbulen (Re > 4000), faktor gesekan (f) dapat dicari dengan Moody diagram seperti keterangan diatas. Dan jika Re = 2300 - 4000, aliran tersebut disebut sebagai aliran transisi . Berikut ini gambar dari ketiga jenis aliran tersebut [Thermodynamic Pumps hal 18] :
Gambar 2.22 Jenis – jenis aliran dalam Pipa
II.2.5.4.2 Minor head loss (minor losses)
Merupakan kerugian head pada fitting atau sambungan – sambungan pipa seperti katup (valve), belokan (elbow), saringan (strainer), sambungan, rugi – rugi pada bagian saluran masuk (entrance), rugi – rugi pada bagian saluran keluaran (exit), pembesaran pipa (expansion) dan pengecilan pipa (contraction) yang terdapat sepanjang sistem perpipaan. Dapat dicari dengan menggunakan Rumus [Bruce R. Munson hal 437] :
g
V
k
h
m2
2
...(2.43)Dimana : hm = Minor losses (m)
k = Koefisien gesekan dalam fitting, elbow dan valve V = Kecepatan rata – rata aliran (m/s)
Dalam menghitung kerugian pada fitting, elbow dan valve dapat menggunakan tabel pada lampiran. Besaran ini menyatakan kerugian pada fitting, elbow dan valve dalam ukuran panjang ekivalen dari pipa lurus.
II.2.5.4.3 Total Losses
Total losses merupakan kerugian total sistem perpipaan, yaitu :
h
tot
h
f
h
m ...(2.44)Dimana : htot : Total losses (m)
hf : Jumlah mayor losses (m) hm : Jumlah minor losses (m)
II.2.6 Kecepatan Spesifik dan Tipe Impeller
Jenis impeler yang digunakan pada suatu pompa tergantung pada kecepatan spesifiknya. Kecepatan spesifik adalah kecepatan yang diperlukan pompa untuk menghasilkan head 1m dengan kapasitas 1 m3/s dan dihitung berdasarkan persamaan di bawah ini [Fritz diesel hal 248] :
4 3
2 1
H
Q
n
n
s
...(2.45)Dimana : nS= Kecepatan spesifik (1/menit)
n = kecepatan kerja /putar pompa yang telah dipilh (menit-1) Q = kapasitas pompa (m3/s)
H = Head pompa (m)
Tabel 2.1 Klasifikasi impeler menurut putaran spesifik
No Jenis Impeler nS
1. Radial Flow 500 – 3000
2. Francis 1500 – 4500
3. Aliran Campur 4500 – 8000 4. Aliran aksial 8000 ke atas
Pump selection book, C.P Beaton, G.T Meiklejhon
II.2.7 Daya Pompa Sentrifugal
Daya Pompa adalah daya yang dibutuhkan poros pompa untuk memutar impeler didalam memindahkan sejumlah fluida dengan kondisi yang diinginkan. Besarnya daya poros yang dibutuhkan dapat dihitung berdasarkan [ Fritz Diesel hal 243] :
PP =
P
P g
H Q
. . ....(2.46)
Dimana : PP = Daya pompa (watt) Q = Kapasitas pompa (m3/s) HP = Head pompa (m)
= rapat jenis fluida (kg/m3) g = percepatan gravitasi (m/s2)
P = Efisiensi PompaPm =
t P
N
) 1 (
...(2.47)
Dimana : Pm = Daya motor penggerak (kW) PP = Daya pompa (kW)
= Faktor cadangan daya motor listrik = (0.1 - 0.2)
t= Efiensi transmisi = 1.0 (dikopel langsung)Sedangkan daya hidrolik (daya teoritis ) pompa yaitu daya yang dibutuhkan untuk mengalirkan sejumlah zat cair dapat dihitung berdasarkan persamaan di bawah ini [ Sularso hal 53 ] :
PH = Q.H P.
.g ...(2.48) Dimana : PH = Daya hidrolik pompa (watt)II.2.8 Torsi Pompa Sentrifugal
Torsi pada pompa sentrifugal adalah momen gaya hasil bagi antara daya pompa dengan kecepatan putaran.Torsi pompa dapat dihitung berdasarkan persamaan di bawah ini [Fritz Diesel hal 260] :
Tp =
PP
Nm...(2.49)
Dimana : TP = Torsi pompa (Nm) PP = Daya pompa (kW)
= Kecepatan sudut dalam radian/detik=
60 2
nBAB III
PERHITUNGAN PANAS PADA MOTOR DC PENGUATAN SHUNT
AKIBAT KERJA TERUS MENERUS (CONTINOUS DUTY)
MULAI PADA SAAT START SAMPAI PENGEREMAN
III.1 Kelas – kelas kerja dari suatu motor
Menurut IEC sifat pemakaian motor dirancang untuk dioperasikan dibagi dengan 8 kelas kerja antara lain [ s.k. Pillai hal 138] :
1. Kerja Terus Menerus
Motor dioperasikan dengan beban yang tetap dalam jangka waktu tidak terbatas untuk mencapai kesetimbangan suhunya. Motor beroperasi lebih dari 3 jam sudah termasuk kategori kontinu. Pompa sentrifugal, blower, kipas angin, kompresor dan konveyor merupakan peralatan yang bekerja terus – menerus dengan beban yang konstan.
2. Kerja Waktu Pendek
Motor dioperasikan dengan beban konstan selama waktu yang tidak lama untuk mencapai suhu kesetimbangannya. Kemudian diikuti periode istirahat dengan jangka waktu yang lama untuk mengembalikan kesetimbangan suhu pada motor dengan perantara pendinginan.
3. Kerja Periode Sesaat
4. Kerja Periode Sesaat dengan Start
Kerja periode sesaat dengan start menunjukkan suatu urutan siklus kerja yang identik. Motor dioperasikan dengan beban tetap secara periodic “jalan” – “stop/istirahat”. Arus starting ada pengaruhnya terhadap timbulnya panas di stator.
5. Kerja Periode Sesaat dengan Start dan Pengereman
Kerja Periode Sesaat dengan Start dan Pengereman menunjukkan urutan siklus kerja yang identik. Motor dioperasikan dengan beban tetap dengan urutan siklus “starting – running dengan beban tetap” dan “starting – running tanpa beban ”.
6. Kerja terus menerus dengan periode beban sesaat
Kerja terus menerus dengan periode beban sesaat menunjukkan urutan siklus kerja yang identik. Motor dioperasikan dengan beban tetap dengan urutan siklus “running dengan beban tetap” dan “running tanpa beban ”.
7. Kerja Terus menerus dengan Start dan Pengereman
Kerja terus menerus dengan start dan pengereman menunjukkan urutan siklus kerja yang identik. Motor beroperasi dengan siklus periode starting, periode operasi dengan beban tetap, dan periode pengereman elektrik. Tidak ada periode istirahat atau berhenti.
8. Kerja Terus menerus dengan perubahan periode kecepatan
III.2 Metode menentukan nilai momen inersia (J)
Secara umum, momen inersia adalah sifat suatu benda untuk dapat menaikkan ataupun menurunkan kecepatan dalam sebuah gaya perputaran (rotasi). Semua mesin yang berputar seperti pompa, engine, turbin mempunyai momen inersia. Di dalam menganalisa performansi dari sebuah drive, perlu untuk mengetahui nilai dari momen inersia dari bagian – bagian yang berputar. Salah satunya dengan cara eksperimen. Dalam percobaan ini, momen inersia total adalah jumlah momen inersia dari bagian – bagian yang berputar dari motor dc, kopling dan pompa sentrifugal. Jadi, J = JM + JK + JP.
III.2.1 Metode Retardasi Dalam Menentukan Momen Inersia Motor DC (JM)
III.2.1.1 Prinsip Dasar
Metode ini digunakan selain untuk menentukan J juga untuk menentukan rugi – rugi rotasi pada motor DC. Dengan menjalankan metode ini, maka dapat diketahui energi yang hilang akibat rugi – rugi rotasi dalam Motor DC shunt.
Anggap suatu motor DC shunt bekerja pada saat tanpa beban.
1. Jika suplai ke jangkar dilepas tetapi medan tetap dieksitasi normal, motor tersebut mulai melambat secara bertahap dan akhirnya berhenti. Energi kinetik jangkar digunakan untuk mengatasi rugi – rugi gesek dan angin dan rugi – rugi besi.
diperkirakan karena tidak adanya fluks sehingga tidak ada rugi – rugi besi.
Dengan menjalankan pengujian yang pertama, kita akan mendapatkan nilai rugi – rugi gesek, angin dan besi. Namun demikian, jika kita juga menjalankan pengujian yang kedua, kita dapat memisahkan antara rugi – rugi gesek dan angin dengan rugi – rugi besi.
Energi kinetik jangkar ditentukan dengan persamaan :
2
2 1
J
EK ...(3.1)
Dimana : J = momen inersia jangkar (kgm2) = Kecepatan sudut, (rad/s) =
60 2n
n = Putaran normal (rpm)
Maka di dalam metode retardasi ini, laju perubahan energi kinetik dianggap untuk mengatasi rugi – rugi rotasi motor. Jika laju perubahan energi kinetik ini disimbolkan dengan w, maka
w
=
dt dEK
w = ) 2 1 ( J2 dt
d
w= dt d J
w= )
60 2 ( 60 2 n dt d n
J
w= Watt
dt dn Jn 011 , 0 ...(3.2) Dengan mengetahui nilai momen inersia jangkar (J) dan nilai perubahankecepatan ( )
dt d
atau dt dn
III.2.1.2 Metode Pengukuran Momen Inersia Pada Jangkar (J)
Di dalam uji retardasi, rugi – rugi rotasi motor di berikan dengan persamaan (3.2) [B.L.Theraja hal 744] :
w= Watt dt dn Jn