PENGEMBANGAN SISTEM KENDALI DEBIT POMPA AC
MENGGUNAKAN PULSE WIDTH MODULATION (PWM)
BERBASIS PERTANIAN PRESISI
HERI HERIYANTO
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN SUMBER
INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Pengembangan Sistem Kendali Debit Pompa AC Menggunakan Pulse Width Modulation (PWM) Berbasis Pertanian Presisi adalah benar karya saya dengan arahan dari pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
ABSTRAK
HERI HERIYANTO. Pengembangan Sistem Kendali Debit Pompa AC Menggunakan Pulse Width Modulation (PWM) Berbasis Pertanian Presisi. Dibimbing oleh KUDANG BORO SEMINAR.
Pemberian air untuk irigasi tanaman harus dilakukan sesuai dengan kebutuhan tanaman untuk menghindari pemborosan air selama irigasi. Berbagai teknologi kendali irigasi telah dikembangkan namun tidak ada satu pun yang menggunakan Pulse Width Modulation (PWM) untuk mengontrol pompa AC. Penelitan ini bertujuan untuk mengembangkan teknologi alternatif berbasis prinsip pertanian presisi menggunakan Pulse Width Modulation (PWM). Dengan mengatur duty cycle PWM, debit pompa dapat diatur untuk pemberian air irigasi yang lebih teliti. Sistem yang dikembangkan telah diujicoba menggunakan data cuaca pada lokasi tertentu. Hasil ujicoba menunjukkan bahwa sistem dapat bekerja dengan baik.
Kata kunci: pemborosan air, kontrol, pertanian presisi, PWM.
ABSTRACT
HERI HERIYANTO. Development of AC Pump Flow Rate Control System Using Pulse Width Modulation (PWM) Based on Precision Agriculture. Supervised by KUDANG BORO SEMINAR.
Water supplying for crops irrigation must be supplied according to the needs of crops to prevent waste water during irrigation. Various technologies for irrigation control have been developed but none of them using Pulse Width Modulation for controlling AC Pump. The purpose of this research is to develop an alternative of technology based on precision agriculture principle using Pulse Width Modulation. By controlling duty cycle of PWM, flow rate of pump can be controlled to supply water more precisely. The system developed has been tested with real climate data on specific geographical area. The testing results show that the system has been working correctly.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknologi Pertanian
pada
Departemen Teknik Mesin dan Biosistem
PENGEMBANGAN SISTEM KENDALI DEBIT POMPA AC
MENGGUNAKAN PULSE WIDTH MODULATION (PWM)
BERBASIS PERTANIAN PRESISI
HERI HERIYANTO
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
Judul Skripsi : Pengembangan Sistem Kendali Debit Pompa AC Menggunakan Pulse Width Modulation (PWM) Berbasis Pertanian Presisi Nama : Heri Heriyanto
NIM : F14090006
Disetujui oleh
Prof. Dr. Ir. Kudang Boro Seminar, MSc Pembimbing
Diketahui oleh
Dr. Ir. Desrial, MEng Ketua Departemen
PRAKATA
Puji syukur Alhamdulillah penulis panjatkan kehadirat Allah SWT. karena atas rahmat dan karunia-Nya penulis dapat menyelesaikan penelitian dengan judul
“Pengembangan Sistem Kendali Debit Pompa AC Menggunakan Pulse Width Modulation (PWM) Berbasis Pertanian Presisi”.
Ucapan terima kasih penulis sampaikan kepada :
1. Prof. Dr. Ir. Kudang Boro Seminar, M.Sc selaku dosen Pembimbing Akademik yang senantiasa memberikan bimbingan dan arahan kepada penulis.
2. Dr. Ir. I Dewa Made Subrata, M.Agr atas bimbingan dan bantuan kepada penulis dalam menyelesaikan pembuatan hardware.
3. Dr. Ir. Mohamad Solahudin, M.Si atas bimbingan dan bantuan kepada penulis dalam menyelesaikan modifikasi software.
4. Ibu, bapak, serta adik tercinta atas semua do’a dan kasih sayangnya.
5. Cecep Saiful Rahman yang telah mengajari penulis mengenai hal-hal yang berkaitan dengan pemrograman EMS-SD/MMC dan RTC.
6. Dr. Liyantono, S.TP, M.Agr atas saran yang diberikan kepada penulis.
7. M. Sigit Gunawan, Setia Trianto, M. Nafis Rahman, dan Nopri Suryanto atas dukungan serta bantuan kepada penulis.
8. Aktatama Silviana Dewi atas dukungannya untuk penulis.
9. Semua pihak yang tidak dapat disebutkan satu per satu atas bantuan serta dukungannya.
Ide penelitian ini berawal dari permasalahan pada saat melakukan Praktik Lapangan di PT. Saung Mirwan, Bogor. Saung Mirwan merupakan agroindustri yang cukup besar namun hampir semua kendali proses produksi dilakukan secara manual, salah satunya adalah proses pemberian nutrisi tanaman. Karena kendali dilakukan secara manual, kesalahan pada saat produksi sering terjadi. Kesalahan pada proses pemberian nutrisi menyebabkan pemborosan air dan energi listrik.
Semoga karya ilmiah ini bermanfaat.
DAFTAR ISI
Waktu dan Tempat Penelitian 3
Alat dan Bahan 3
Prosedur Penelitian 3
Perancangan Piranti Keras (Hardware) 4
Ujicoba Fungsional 4
HASIL DAN PEMBAHASAN 5
Perancangan Piranti Keras 5
Pulse Width Modulation (PWM) 5
Sistem Kontrol Otomatis 5
Sistem Kerja Piranti Keras 7
Kontrol PWM Pompa AC 8
Ujicoba Fungsional 10
Uji Laboratorium 10
Uji Lapangan 14
Modifikasi Piranti Lunak 16
Masukan dan Keluaran Piranti Lunak 17
Menu-menu dalam Piranti Lunak 18
Keunggulan dan Kelemahan Piranti Lunak 25
DAFTAR TABEL
1 Penggunaan Port Mikrokontroler 7
2 Kombinasi Logika dari Mikrokontroler 12
3 Spesifikasi Pompa yang Digunakan 14
DAFTAR GAMBAR
1 Proses Pemberian Nutrisi di PT. Saung Mirwan, Bogor 1
2 Bahan-bahan Utama Piranti Keras 3
3 Sinyal PWM 5
4 Diagram Blok Sistem Kontrol Rangkaian Terbuka 6 5 Diagram Blok Sistem Kontrol Rangkaian Tertutup 6
6 Diagram Sistem Kontrol 6
7 Rangkaian zero crossing, pembalik logika, dan pembangkit gelombang 9
8 Rangkaian ON-OFF beban AC 9
9 Pencacahan Gelombang Sinusoidal 10
10 Rancangan Struktural Piranti Keras 11
11 Gelombang Keluaran Piranti Keras Pada Beberapa Duty Cycle 12 12 Gelombang Keluaran Pada Berbagai Kombinasi Logika 13 13 Grafik Hubungan Debit dan Tegangan pada Pompa Hisap 14 14 Grafik Hubungan Debit dan Tegangan pada Pompa Celup 15
15 Tampilan Halaman Utama Piranti Lunak 16
16 Contoh File Masukan 17
17 Sub-menu Perhitungan Sistem 18
18 Tektstur Fine Sand 19
19 Tekstur Sandy Loam 19
20 Tekstur Sandy Clay Loam 19
21 Grafik Seigitiga Tekstur Tanah 20
22 Hasil Simulasi 21
23 Grafik Kadar Air Tanah 22
24 Grafik Hasil Koreksi Akibat Irigasi 23
25 Menu Kontrol Irigasi 23
26 Menu Input Data Koreksi 24
27 Grafik Hasil Koreksi Menggunakan Menu 25
DAFTAR LAMPIRAN
1 Program Utama Proses Kontrol 28
2 Diagram Alir Cara Kerja Sistem 32
3 Rangkaian Kontrol PWM AC 33
4 Hasil Pengukuran pada Pompa Hisap 34
5 Hasil Pengukuran pada Pompa Celup 35
PENDAHULUAN
Latar Belakang
Lubis (2000) dalam acara Forum Air Dunia II (World Water Forum) di Den Haag menyebutkan bahwa Indonesia termasuk salah satu negara yang akan mengalami krisis air pada 2025. Penyebabnya antara lain kelemahan dalam pengelolaan air, seperti pemakaian air yang tidak efisien. Laju kebutuhan akan sumber daya air dan potensi ketersediaannya sangat pincang dan semakin menekan kemampuan alam dalam menyediakan air. Sumberdaya air secara kuantitatif akan semakin terbatas dan secara kualitatif akan semakin menurun.
(a) (b)
Gambar 1 Proses Pemberian Nutrisi di PT. Saung Mirwan, Bogor (a) Penyiraman Manual dan (b) Irigasi Pompa
Gambar di atas diambil pada saat melakukan Praktik Lapangan di sebuah perusahaan agroindustri yaitu PT. Saung Mirwan, Bogor. Penggunaan air untuk pemberian nutrisi di perusahaan tersebut masih sangat tidak efektif. Pada saat pemberian nutrisi banyak air terbuang dan tidak termanfaatkan bahkan tumpah ke jalan transportasi lahan. Hal ini terjadi karena pekerja lupa mematikan pompa atau menutup pipa penyiraman. Pemborosan penggunaan air ini terjadi akibat kontrol dilakukan secara manual oleh manusia (pegawai). Manusia mempunyai batas ingatan, sehingga pada saat tertentu manusia mengingat dan fokus pada satu pekerjaan namun melupakan pekerjaan lain. Akibat banyaknya pekerjaan yang dilakukan, pekerja sering lalai dalam memerhatikan proses penyiraman. Prawiradisastra (2007) juga menyebutkan bahwa penggunaan air di agroindustri kerupuk ikan berlebih sehingga menyebabkan pemborosan air. Agar tidak terjadi pemborosan air, tanaman tersiram sesuai dosis, dan mengurangi kelalaian pegawai, diperlukan kontrol otomatis dalam melakukan proses pemberian nutrisi.
Suatu perusahaan agroindustri dapat saja memproduksi (budidaya) tanaman yang berbeda setiap kali tanam. Kebutuhan air setiap jenis tanaman berbeda sehingga volume total air yang dikeluarkan oleh pompa juga akan berbeda. Pengaturan volume air pompa ini dapat dilakukan dengan mengatur waktu atau debit yang keluar dari pompa tersebut.
2
(2005). Madyana et.al (2008) menggunakan PLC (Programable Logic Controller) dalam kontrolnya, sedangkan Sofwan (2005) menggunakan Fuzzy Logic. Penelitian yang dilakukan tidak berbeda jauh dengan penelitian-penelitan yang sudah dilakukan, namun kontrol dilakukan untuk mengatur debit pompa AC melalui kontrol Pulse Width Modulation (PWM). Kontrol untuk pompa AC yang umum dilakukan adalah menggunakan kontrol on-off. Kontrol debit pompa AC melalui PWM ini dapat menjadi salah satu alternatif dalam melakukan kontrol debit selain menggunakan kontrol on-off. Sistem kontrol yang dikembangkan menggunakan software dan hardware. Software digunakan untuk ujicoba fungsional sistem sehingga dalam penerapannya software ini dapat diganti menggunakan sensor.
Kebutuhan air di setiap lokasi berbeda sesuai dengan keadaan tanah, perakaran tanaman, dan cuaca. Namun untuk satu lokasi budidaya umumnya dianggap sama karena tanah dan tanamannya sama. Presisi dalam pemberian air kepada tanaman berarti tepat dalam waktu dan jumlahnya. Pemberian air dilakukan jika kadar air tanah (KAT) sudah mendekati titik layu permanen (TLP) sampai kadar air tanah kembali ke kapasitas lapang (KL) tanah tersebut. Adapun jumlah air yang diberikan harus sesuai dengan jenis tanahnya sehingga jumlah air yang diberikan tidak melebihi kapasitas lapang tanah tersebut. Kebutuhan air dapat diketahui dengan menggunakan sensor jika kontrol pemberian air menggunakan sistem kontrol tertutup. Penggunaan sensor sudah umum dilakukan sehingga untuk ujicoba penelitian ini digunakan sistem kontrol terbuka dengan data simulasi sebagai masukan bagi sistem kontrol. Data simulasi merupakan keluaran dari software. Data simulasi ini digunakan sebagai data ujicoba dengan asumsi keadaan di lapangan sama seperti simulasi. Pada saat keadaan berbeda maka perlu dilakukan koreksi terhadap data masukan.
Tujuan Penelitian
Tujuan dari penelitian ini adalah :
1. Merancang sistem kontrol debit air pompa AC menggunakan Pulse Width Modulation (PWM).
2. Mengujicoba hasil rancangan menggunakan piranti lunak simulasi neraca air tanah.
Ruang Lingkup Penelitian
3
METODE
Waktu dan Tempat Penelitian
Penelitian dilaksanakan dari bulan Februari hingga bulan September 2013. Pembuatan piranti keras berupa rangkaian elektronik dilakukan di Laboratorium Instrumentasi dan Kontrol, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor. Pembuatan piranti lunak dilaksanakan di Laboratorium Teknik Bioinformatika (TBI), Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor. Pengujian fungsional dilakukan di Greenhouse Laboratium Lapangan Siswadhi Soepardjo, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
Alat dan Bahan
Alat yang digunakan dalam penelitian ini adalah solder, timah, obeng, tang, bor tangan, gergaji besi, cutter, multimeter, dan penyedot timah. Adapun bahan-bahan yang digunakan adalah mikrokontroler, downloader mikrokontroler, I2C Peripheral, EMS-SD/MMC (Embedded Module Series-SD/MMC), MMC/SD-Card, komputer notebook, timah solder, papan PCB, pompa AC, dan komponen-komponen elektronik. Bahan-bahan utama dapat dilihat pada Gambar 2.
Prosedur Penelitian
Penelitian yang dilakukan adalah merancang sistem kontrol debit pompa AC menggunakan Pulse Width Modulation (PWM). Biasanya kontrol PWM ini dilakukan pada pompa DC namun pada penelitian ini dilakukan pada pompa AC. Untuk melakukan kontrol PWM seperti ini diperlukan rangkaian elektronik yang khusus untuk mengatur PWM pada AC.
(a) (b) (c) (d)
Gambar 2 Bahan-bahan Utama Piranti Keras
4
Perancangan Piranti Keras (Hardware)
Piranti keras ini terdiri dari beberapa modul dan rangkaian elektronik. Modul elektronik menggunakan modul yang tersedia di pasaran. Rangkaian elektronik yang digunakan pada penelitian ini merupakan rangkaian elektronik yang telah dikembangkan untuk mengatur PWM motor AC1.
Dalam proses pembuatan suatu alat/mesin, fungsi-fungsi dari setiap bagian alat/mesin harus diperhatikan agar tujuan perancangan dapat dicapai. Adapun rancangan fungsional dari piranti keras (hardware) yang dibuat pada penelitian ini adalah :
1. Pembaca Data Memory
Fungsi ini dikerjakan oleh EMS-SD/MMC yang dihubungkan dengan mikrokontroler. EMS-SD/MMC adalah suatu modul elektronik untuk menyederhanakan antarmuka antara SD-Card (atau MMC) dan mikrokontroler. EMS-SD/MMC membaca data yang berada di dalam SD-Card atau MMC. 2. Pengatur Proses Kontrol
Proses kontrol diatur oleh mikrokontroler dengan I2C Peripheral sebagai penghitung waktu. I2C Peripheral merupakan suatu modul yang tersusun atas Real Time Clock (RTC) sebagai penghitung waktu, dan EEPROM yang semuanya menggunakan antarmuka I2C. Integrate circuit (IC) yang dipasang pada I2C untuk RTC adalah IC DS1307.
3. Pengatur Kecepatan Putar (PWM) Pompa
Kecepatan putar pompa AC dapat diatur menggunakan rangkaian elektronik yang tersusun atas rangkaian zero crossing, pembalik logika, pembangkit sinyal, dan rangkaian on-off.
Ujicoba Fungsional
Uji fungsional dilakukan untuk mengetahui apakah alat dapat bekerja sesuai tujuan atau tidak. Alat dibuat untuk mengatur kecepatan putar dan debit pompa AC maka parameter-parameter yang dilihat pada uji fungsional berkaitan dengan putaran dan debit yang keluar dari pompa.
Kontrol debit melalui PWM ini dapat dilakukan pada semua jenis pompa AC. Ujicoba fungsional sistem yang dikembangkan ini dilakukan pada pompa untuk irigasi. Ujicoba dilakukan dengan sistem kontrol terbuka. Input yang digunakan adalah data dari piranti lunak. Piranti lunak yang digunakan adalah piranti lunak simulasi neraca air tanah2. Piranti lunak tersebut dimodifikasi untuk mendapatkan data kebutuhan irigasi dan ujicoba pada piranti keras. Data yang didapatkan dari piranti lunak ini merupakan data hasil simulasi sehingga pada penerapannya dapat diganti menggunakan sensor atau dikombinasikan antara data simulasi dengan hasil data dari sensor.
1
Rangkaian elektronik kontrol PWM motor AC yang telah dikembangkan oleh Dr. Ir. I Dewa Made Subrata, M.Agr.
2
5
HASIL DAN PEMBAHASAN
Perancangan Piranti Keras
Perancangan yang dilakukan adalah perancangan rangkaian elektronik untuk proses kontrol. Objek yang akan dikontrol adalah debit keluaran pompa AC berdasarkan Pulse Width Modulation (PWM).
Pulse Width Modulation (PWM)
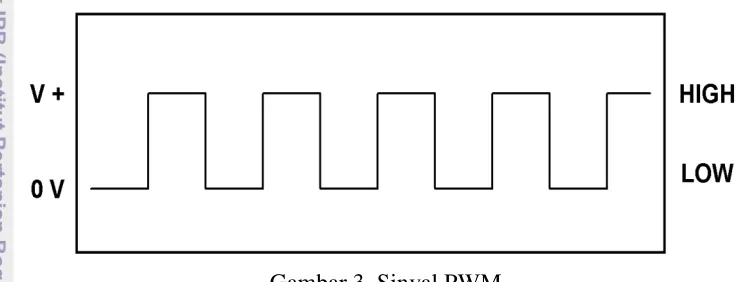
Pulse Width Modulation adalah pengaturan lebar sinyal keluaran yang dinyatakan dalam pulsa dalam suatu perioda untuk mendapatkan tegangan rata-rata yang berbeda (Prayogo, 2012). Perangkat lunak yang dikembangan didesain untuk mengatur sinyal keluaran arus AC dengan cara memotong bagian dari gelombang sinusoidal.
Gambar 3 Sinyal PWM
Gelombang PWM memiliki duty cycle. Duty cycle adalah persentase sinyal HIGH terhadap sinyal keseluruhan dalam satu periode. Misalnya duty cycle 75% berarti dalam periode tersebut sinyal keluarannya adalah 75% HIGH dan 25% LOW sehingga tegangan yang keluar adalah ¾ dari tegangan yang masuk. Jika tegangannya 220 Volt, maka pada duty cycle 75% tegangan keluarnya adalah 165 Volt.
Sistem Kontrol Otomatis
Menurut Subrata (2009) sistem kontrol otomatis adalah sistem kontrol umpan balik dengan acuan masukan atau keluaran yang dikehendaki dapat konstan atau berubah secara perlahan dengan berjalannya waktu. Tugas utama sistem kontrol adalah menjaga keluaran sebenarnya tetap berada pada nilai yang dikehendaki. Banyak contoh sistem kontrol otomatis, diantaranya adalah pengaturan kadar pH pada nutrisi untuk tanaman dalam rumah tanaman.
6
Gambar 4 Diagram Blok Sistem Kontrol Rangkaian Terbuka
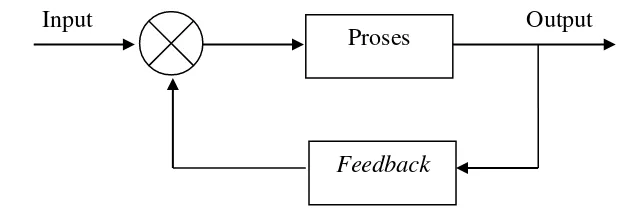
Sistem kontrol rangkaian tertutup (closed-loop control system) merupakan sistem pengendalian dimana besaran keluaran memberikan efek terhadap besaran masukan sehingga besaran yang dikendalikan dapat dibandingkan terhadap harga yang diinginkan melalui alat pencatat (indikator atau rekorder). Perbedaan yang terjadi antara besaran yang dikendalikan dan penunjukan pada alat pencatat digunakan sebagai koreksi.
Gambar 5 Diagram Blok Sistem Kontrol Rangkaian Tertutup
Jenis sistem kontrol yang dikembangkan untuk ujicoba fungsional hardware ini merupakan sistem kontrol terbuka. Masukan yang dibutuhkan sistem untuk melakukan proses kontrol adalaha data hasil simulasi yang terdapat dalam EMS-SD/MMC. Data ini akan diproses oleh mikrokontroler sebagai pengendali proses. Keluaran yang dihasilkan sistem adalah debit dan lama penyalaan pompa berdasarkan kebutuhan tanaman.
Kontrol debit pompa menggunakan PWM ini dilakukan jika debit pompa yang digunakan lebih besar dari kebutuhan. Selain kontrol PWM dapat juga dilakukan kontrol on-off atau kontrol katup keluaran.
EMS-SD/MMC Mikrokontroler Pompa Irigasi Gambar 6 Diagram Sistem Kontrol
Proses Output Input
Proses
Input Output
7 Ujicoba piranti keras ini dilakukan dengan sistem kontrol tertutup dengan masukan berupa file. File ini dihasilkan dengan memodifikasi piranti lunak. File yang akan dibaca oleh mikrokontroler dengan bantuan EMS-SD/MMC adalah
“data.txt” yang ada dalam memory card (SD/MMC). Pengambilan data dari memory card memerlukan memori mikrokontroler yang cukup besar, maka agar proses kontrol dapat berjalan lancar dipilih mikrokontroler ATMega32. Mikrokontroler ini dapat diganti menggunakan mikrokontroler yang memiliki memori lebih besar seperti ATMega64.
Sistem Kerja Piranti Keras
Pusat kontrol (Central Processing Unit/CPU) dari piranti keras yang dikembangkan adalah mikrokontroler ATMega32 yang memiliki 32 pin. Pin ini dibagi menjadi 4 Port yaitu Port A, B, C, dan D. Port yang digunakan untuk sistem ini ada 3 (tiga) yaitu B, C, dan D. Port A tidak digunakan agar sistem dapat dikembangkan dengan menggunakan sensor. Port A merupakan ADC (Analog to Digital Converter). Pengunaan port dan pin mikrokontroler dapat dilihat pada Tabel 1.
Tabel 1 Penggunaan Port Mikrokontroler
PORT PIN Keterangan
A 0 – 7 Tidak digunakan. Dapat digunakan sebagai ADC (Analog to Digital Converter).
B 0,1 SDA dan SCL
2,3,4,5,6,7 EMS-SD/MMC C 0 – 7 LCD 2x16 Display
D 0 Kontrol Relay ON-OFF
1,2,3 Kontrol PWM AC
4,5,6,7 Tidak digunakan. PIND.7 dapat digunakan untuk kontrol PWM Motor DC.
Untuk memrogram mikrokontroler digunakan sebuah piranti lunak yaitu Code Vision AVR. Code Vision AVR menggunakan bahasa pemrograman C. Program utama untuk sistem kontrol ini dapat dilihat pada Lampiran 1.
Sistem kerja dari perangkat keras ini merupakan sistem kontrol terbuka yang keadaan keluaran tidak memberikan umpan balik kepada masukan. Sistem kontrol seperti ini menjadi tidak presisi jika keadaan keluaran tidak sesuai. Dalam kontrol irigasi ini, agar kontrol tetap presisi maka dilakukan koreksi setiap hari. Pengguna harus memasukkan angka selisih antara keaadaan simulasi dengan keadaan nyata harian di lapangan.
Sebagaimana telah disebutkan sebelumnya bahwa keluaran dari piranti lunak akan dijadikan masukan bagi piranti keras. Piranti lunak menghasilkan file
“data.txt” yang berisi PWM yang dibutuhkan serta lama aplikasi irigasi. File
disimpan ke dalam memory card untuk proses kontrol. Memory card (SD-Card/
8
Real Time Clock (RTC) agar proses kontrol dapat dilakukan berdasarkan waktu yang sebenarnya.
Pada saat piranti keras dijalankan, hal yang pertama dilakukan sistem adalah mendeteksi apakah ada memory card di dalam EMS-SD/MMC atau tidak. Jika memori tidak ada maka sistem akan meminta memasukkan memori, sebaliknya jika memori sudah ada maka sistem akan membaca file “data.txt” kemudian
membuat file baru dengan nama “output.txt”. Pembuatan file baru ini bertujuan
agar kontrol dapat terus berjalan meskipun sistem mengalami mati pada saat
proses kontrol. File “output.txt” berisi catatan jumlah aplikasi irigasi yang dilakukan. Misalnya, pertama kali sistem berjalan pada tanggal 15, dengan kata
lain file “output.txt” dibuat pada tanggal 15. Pada tanggal 19 file “ouput.txt”
sudah berisi 4 (empat) data sehingga sistem akan otomatis mengambil data kelima
dari file “data.txt”. Setelah aplikasi irigasi selesai dilakukan, catatan jumlah aplikasi irigasi dalam “output.txt” juga akan berubah.
Sistem akan selalu mengecek tanggal dan waktu setiap saat. Pada saat waktu RTC sesuai dengan waktu mulai pemberian irigasi maka sistem akan bekerja mengatur pompa. Lama bekerja sistem dan pemilihan PWM berdasarkan atas data
yang berada pada file “data.txt”. Setelah bekerja sesuai data, pompa akan otomatis
dimatikan oleh sistem. Sistem akan terus bekerja sepert ini sampai data pada file
“data.txt” dikerjakan seluruhnya (sampai masa panen). Diagram alir kerja sistem
dapat dilihat pada Lampiran 2.
Kontrol PWM Pompa AC
Kontrol PWM arus AC tidak dapat langsung dilakukan seperti pada arus DC. Gelombang arus DC berupa gelombang kotak sehingga persentase sinyal HIGH PWM dapat langsung diatur menggunakan mikrokontroler. Gelombang arus AC berbeda dengan DC. Gelombang arus AC berupa sinusoidal sehingga perlu rangkaian elektronik tambahan jika akan dilakukan kontrol PWM pada pompa AC.
Kontrol PWM pompa AC tidak dilakukan dengan pengaturan HIGH-LOW sinyal namun dengan cara memotong gelombang sinusoidal sehingga tegangan dan daya keluaran menjadi berkurang. Jika tegangan dan daya yang keluar lebih kecil maka kecepatan putar pompa juga akan berkurang. Dengan berkurangnya kecepatan putar pompa maka debit yang keluar juga berkurang.
9
Gambar 7 Rangkaian zero crossing, pembalik logika, dan pembangkit gelombang
Gambar 8 Rangkaian ON-OFF beban AC
Rangkaian ini akan berjalan sesuai dengan fungsinya jika syarat-syaratnya terpenuhi. Adapun syarat-syarat tersebut adalah :
Tegangan yang masuk ke rangkaian zero crossing harus sama atau mendekati spesifikasi kebutuhan tegangan IC pada rangkaian zero crossing. Pada rangkaian ini, tegangan yang digunakan adalah 6 Volt AC. Rangkaian zero crossing akan mengubah gelombang sinusoidal menjadi gelombang kotak.
Frekuensi gelombang PWM sama dengan dua kali frekuensi AC.
GROUND yang dipakai digabungkan antara GROUND AC dan DC.
Perubahan logika dari 0 ke 1 pada sinyal PWM harus terjadi pada saat crossing antara AC dan DC.
Keluaran dari rangkaian zero crossing adalah gelombang kotak dengan persentase sinyal HIGH lebih besar dari sinyal LOW. Gelombang ini kemudian masuk ke rangkaian pembalik logika dengan komponen utama IC 7LS400. Gelombang keluaran dari IC 7LS400 adalah gelombang kotak dengan persentase sinyal LOW lebih besar dari sinyal HIGH. Pembalikan bentuk gelombang ini berfungsi untuk men-trigger (memacu) pengaktifan IC pembangkit sinyal yaitu NE555. Gelombang seperti itu dapat diumpamakan sebagai sakelar atau switch.
10
dengan satu hambatan variabel pada kaki 4 serta menggunakan mikrokontroler untuk memasukkan nilai logika pada kaki 9, 10, dan 11.
Gelombang keluaran dari IC NE555 menjadi masukan bagi rangkaian on-off beban AC. Keluaran dari NE555 masuk ke kaki 2 IC MOC3020. Gelombang yang masuk ini akan mencacah gelombang sinusoidal AC seperti pada Gambar 9. Bagian yang tidak diarsir merupakan tegangan dan daya yang keluar untuk beban AC. Bagian yang diarsir merupakan tegangan dan daya yang dihilangkan. Bentuk gelombang kotak yang berbeda-beda akan menghasilkan variasi pencacahan gelombang sinusoidal yang berbeda pula. Variasi tegangan keluaran yang dihasilkan akan menghasilkan tegangan keluaran dan kecepatan putar pompa yang bervariasi.
Gambar 9 Pencacahan Gelombang Sinusoidal
Ujicoba Fungsional
Uji Laboratorium
11
Gambar 10 Rancangan Struktural Piranti Keras
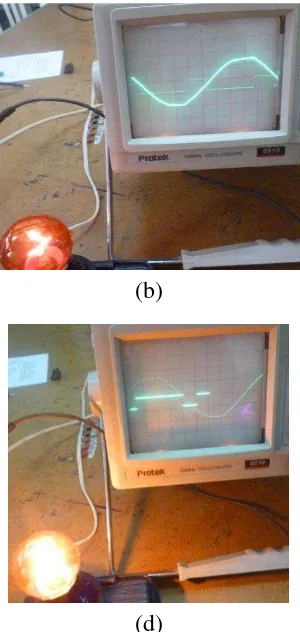
Sebelum dilakukan ujicoba menggunakan pompa di lapangan, dilakukan ujicoba laboratorium terlebih dahulu. Ujicoba laboratorium dilakukan tiga kali. Pada ujicoba pertama, rangkaian kontrol PWM tidak bekerja sehingga dibuat rangkaian baru untuk ujicoba berikutnya. Pada ujicoba kedua, rangkaian kontrol PWM sudah berjalan namun ada beberapa kombinasi logika yang tidak berjalan sehingga ada pergantian komponen pada masukan ke kaki 2 IC NE555 yaitu kapasitor non-polar 22 nF diganti dengan kapasitor polar 1 µF. Setelah dilakukan pergantian komponen maka dilakukan ujicoba ketiga untuk membandingkan gelombang keluaran dengan gelombang AC. Pengukuran gelombang keluaran dilakukan dengan menggunakan oscilloscope. Hasil ujicoba ketiga dapat dilihat pada Gambar 11.
(a) (b)
12
(e)
Gambar 11 Gelombang Keluaran Piranti Keras Pada Beberapa Duty Cycle (a) duty cycle 0%, (b) duty cycle 25%, (c) duty cycle 50%, (d) duty cycle 75%, dan (e) duty cycle 100%
Hasil-hasil di atas didapatkan dengan cara mengatur hambatan variabel. Jika menggunakan logika mikrokontroler maka duty cycle yang dihasilkan ditampilkan pada Tabel 2. Pada saat pengukuran, tegangan listrik adalah 210 Volt. Dengan kata lain duty cycle 100% akan menghasilkan tegangan 210 Volt.
Tabel 2 Kombinasi Logika dari Mikrokontroler Nilai Logika Pin Vout
(volt)
Duty cycle (%)
A B C
1 1 1 0 0
0 1 1 103 49
1 0 1 103 49
0 0 1 139 66
1 1 0 179 85
0 1 0 195 93
1 0 0 200 95
0 0 0 209 99
13
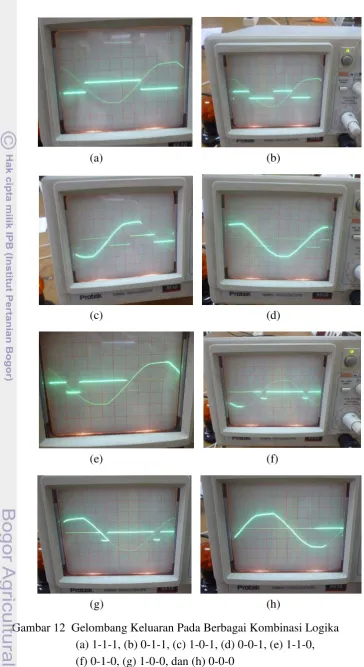
(a) (b)
(c) (d)
(e) (f)
(g) (h)
14
Uji Lapangan
Pengujian di lapangan dilakukan menggunakan dua jenis pompa AC yaitu pompa hisap dan pompa celup. Spesifikasi pompa yang digunakan dapat dilihat pada Tabel 3.
Tabel 3 Spesifikasi Pompa yang Digunakan
Merk dan Jenis Pompa Spesifikasi
Pompa Hisap
PANASONIC GA-130JAK 125 W Daya : 125 Watt Kapasitas Air Min. : 18 liter/menit Sakelar Tekanan : 1.1 – 1.8 kgf/cm2 Tinggi Aliran Min. : 27 m
Daya Hisap : 9 m Pipa Hisap : 1 in Pipa Dorong : 1 in Pompa Celup
Wasser WD-80E
Daya : 80 Watt
Kapasitas Max. : 40 liter/menit Pipa Discharge : ¾ in
Head Max. : 4.5 m
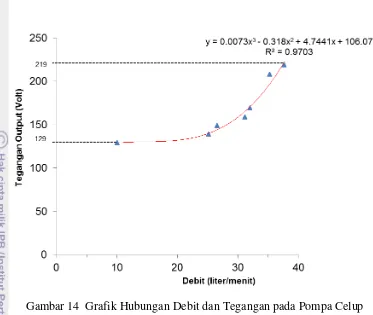
Parameter utama yang diukur pada saat pengujian di lapangan adalah debit air yang keluar dari pompa pada tegangan tertentu. Secara umum debit yang keluar berbanding lurus dengan tegangan. Hubungan debit dan tegangan dapat dilihat pada Gambar 13 dan Gambar 14.
15
Gambar 14 Grafik Hubungan Debit dan Tegangan pada Pompa Celup Berdasarkan Gambar 13 dapat dilihat bahwa pompa hisap yang digunakan hanya mampu bekerja jika tegangan berada diatas 169 Volt (duty cycle > 76.8%). Jika akan dilakukan kontrol PWM terhadap pompa jenis ini maka variasi kontrol PWM harus menggunakan duty cycle lebih besar dari 76.8%. Berbeda dengan pompa hisap, pompa celup dapat bekerja jika tegangan berada diatas 129 Volt (duty cycle > 58.6%) (Gambar 14). Oleh karena pompa celup masih dapat bekerja pada tegangan yang lebih kecil daripada tegangan minimum pompa hisap maka variasi kontrol PWM untuk pompa celup menjadi lebih banyak dibandingkan dengan pompa hisap. Secara lengkap data hasil pengukuran dapat dilihat pada Lampiran 4 dan Lampiran 5.
Dari hasil ujicoba di lapangan dapat diketahui bahwa setiap pompa memiliki batas tegangan masukan minimum agar pompa dapat bekerja. Jenis pompa hisap memiliki kebutuhan daya yang lebih besar dibandingkan dengan pompa celup.
Jika dibandingkan antara hasil ujicoba di lapangan dengan hasil pengukuran di laboratorium, dapat diketahui bahwa piranti lunak yang dikembangkan sudah mampu melakukan kontrol pada empat tingkat duty cycle yaitu 85%, 93%, 95%, dan 99% (Tabel 2). Pada duty cycle 66% kontrol hanya dapat dilakukan pada jenis pompa celup saja. Kontrol PWM tidak dapat dilakukan pada pompa hisap maupun pompa celup jika duty cycle di bawah 66%.
16
Modifikasi Piranti Lunak
Menurut Galitz (2007) untuk membuat sebuah sistem yang benar-benar bermanfaat, perancang harus :
1. Mengetahui bagaimana pengguna berinteraksi dengan komputer. 2. Mengetahui karekteristik penting manusia dalam desain.
3. Mengidentifikasi tingkatan pengetahuan dan pengalaman pengguna. 4. Mengidentifikasi karakteristik kebutuhan, tugas, dan pekerjaan pengguna. 5. Mengidentifikasi karakteristik psikologis pengguna.
6. Mengidentifikasi karakteristik fisik pengguna.
7. Menggunakan metode yang direkomendasikan untuk mengetahui keadaan pengguna.
Piranti lunak yang dimodifikasi memiliki spesifikasi sebagai berikut : 1. Berbasis Windows
Operating System yang umum digunakan adalah Windows. Piranti lunak dibuat agar dapat dengan mudah di-install dan dijalankan pada Operating System ini. Piranti lunak dikembangkan menggunakan Visual Basic 6.0. Piranti lunak ini berbasis desktop dan berjalan secara offline.
Menurut Basuki (2006) bahasa BASIC (Beginners All-Purpose Symbolic Instruction Code) pada dasarnya adalah bahasa yang mudah dimengerti sehingga pemrograman di dalam bahasa Basic dapat dengan mudah dilakukan meskipun oleh orang yang baru belajar membuat program. Hal ini lebih mudah lagi setelah hadirnya Microsoft Visual Basic, yang dibangun dari ide untuk membuat bahasa yang sederhana dan mudah dalam pembuatan scriptnya (simple scripting language) untuk graphic user interface (GUI) yang dikembangkan dalam sistem operasi Microsoft Windows.
2. Resolusi 800x600
Pemilihan resolusi ini dimaksudkan agar piranti lunak dapat ditampilkan secara keseluruhan pada berbagai jenis layar. Resolusi minimal layar monitor untuk menjalankan Windows adalah 800x600.
17
Masukan dan Keluaran Piranti Lunak
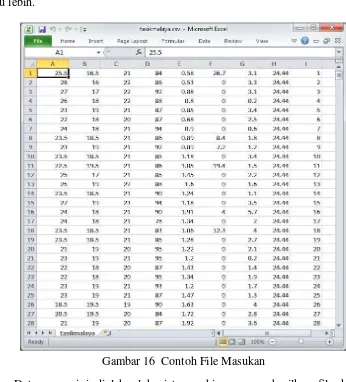
Sebuah sistem bekerja dengan cara menerima masukan (input) untuk menghasilkan keluaran (output). Data cuaca yang diperlukan untuk input simulasi adalah suhu maksimum harian, suhu minimum harian, suhu rata-rata harian, kelembaban harian (RH), kecepatan angin harian, curah hujan harian, evaporasi potensial harian (Ep), dan radiasi surya harian. Data cuaca ini digabungkan dalam satu file dengan format comma delimited (*.csv) agar dapat diolah menggunakan piranti lunak. Setiap daerah memiliki data cuaca yang berbeda-beda. Data cuaca disimpan dengan nama lokasi stasiun cuaca, misalnya “tasikmalaya.csv”. Agar simulasi dapat berjalan lancar, file masukan memiliki data cuaca selama dua tahun atau lebih.
Gambar 16 Contoh File Masukan
Data cuaca ini diolah oleh sistem sehingga menghasilkan file keluaran dalam format text file (*.txt) dengan nama “data.txt”. File ini berisi dua data kontrol yaitu tingkat PWM dan lama aplikasi irigasi. Tingkat PWM dinyatakan dalam satuan tegangan (volt) dengan asusmsi tegangan maksimal adalah 220 Volt. Lama aplikasi irigasi dinyatakan dalam menit.
18
yang dibutuhkan lebih kecil dari kapasitas pompa maka duty cycle yang dipilih berada dibawah 100%.
File “data.txt” merupakan file yang akan dibaca oleh piranti keras. File ini
disalin ke memory card untuk proses kontrol.
Menu-menu dalam Piranti Lunak
Piranti lunak ini terdiri dari beberapa menu utama, yaitu : 1. Kebutuhan Irigasi
Menu ini merupakan piranti lunak simulasi neraca air tanah yang telah dimodifikasi. Piranti lunak simulasi ini awalnya hanya menampilkan hasil dalam bentuk grafik dan tabel, kemudian dilakukan sedikit modifikasi sehingga
menghasilkan keluaran file dengan nama “kebutuhan.txt”. File secara otomatis
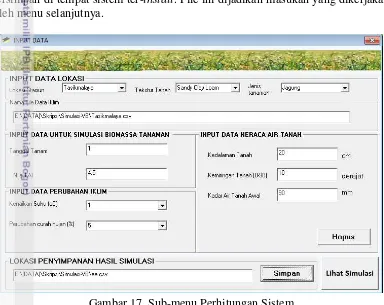
tersimpan di tempat sistem ter-install. File ini dijadikan masukan yang dikerjakan oleh menu selanjutnya.
Gambar 17 Sub-menu Perhitungan Sistem
Piranti lunak ini dapat berjalan jika masukan yang dibutuhkan telah diisi oleh pengguna. Adapun masukan (input) tersebut adalah :
Data Lokasi
19
Gambar 18 Tektstur Fine Sand (Sumber : landscaping.bz)
Gambar 19 Tekstur Sandy Loam (Sumber : canbylandscape.com)
Gambar 20 Tekstur Sandy Clay Loam (Sumber : dpi.vic.gov.au)
20
pada tanah. Dari ketiga jenis fraksi tersebut partikel pasir mempunyai ukuran diameter paling besar yaitu 2 – 0.05 mm, debu dengan ukuran 0.05 – 0.002 mm dan liat dengan ukuran < 0.002 mm. Perbandingan tekstur penyusun tanah dapat dilihat pada Gambar 21.
Gambar 21 Grafik Seigitiga Tekstur Tanah
Data untuk Simulasi Biomassa Tanaman
Data yang dibutuhkan adalah tanggal tanam dan Leaf Area Index (LAI) tanaman pada tiap tahap pertumbuhan. Tanggal tanam yang digunakan berdasarkan kalender Julian date sehingga satu tahun terdiri dari 365 hari. Misalnya tanaman akan ditanam pada tanggal 2 Februari maka tanggal tanam yang dimasukan ke dalam sistem adalah 33.
Leaf Area Index merupakan perbandingan luas daun (satu sisi permukaan saja) tanaman terhadap luas permukaan tanah tempat tanaman tersebut tumbuh. Leaf Area Index atau Indeks Luas Daun juga dapat diartikan perbandingan luas daun total dengan luas tanah yang ditutupi atau luas daun di atas suatu luasan tanah.
Data Perubahan Iklim
Data untuk perubahan iklim adalah perubahan suhu rata-rata (oC) dan perubahan curah hujan (%).
Data Neraca Air Tanah
Data untuk menghitung neraca air tanah adalah kedalaman tanah/ kedalaman perakaran (cm), kemiringan tanah (o), dan kadar air tanah awal saat perhitungan (mm).
21
Gambar 22 Hasil Simulasi
Grafik yang dipakai untuk proses kontrol adalah grafik kadar air tanah. Pada grafik ini terdapat semua komponen yang dibutuhkan untuk menghitung kebutuhan irigasi.
KAT (Kadar Air Tanah)
Kadar air tanah dinyatakan dalam satuan jumlah air (%). Menurut Handoko (1994), kadar air tanah dapat dinyatakan dalam % massa dan % volume. Kadar air tanah berdasarkan % massa (gravimetrik) :
%
Kadar air tanah berdasarkan % volume (volumetrik) :
%
TLP (Titik Layu Permanen)
22
KL (Kapasitas Lapang)
Kapasitas lapang adalah batas pada saat perkolasi air terhenti karena gaya gravitasi sudah seimbang dengan gaya tarik tanah (matriks potensial tanah) (Handoko, 1994).
Titik Aman
Titik/batas aman ini tidak ada batasan khusus. Batas aman ini dapat berbeda-beda disesuaikan dengan kebijakan perusahaan yang akan mengaplikasikan sistem. Pada sistem ini batas aman dibuat sepertiga dari selisih Kapasitas Lapang dan Titik Layu Permanen.
TLP TLP
KL
Aman
3
KL : Kapasitas Lapang (mm) TLP : Titik Layu Permanen (mm)
Gambar 23 Grafik Kadar Air Tanah
Batas aman menjadi penentu apakah hari tersebut akan dilakukan aplikasi irigasi atau tidak. Jika kadar air tanah pada hari tersebut berada di atas batas aman maka irigasi tidak akan dilakukan, dengan kata lain kebutuhan air tanaman pada hari itu adalah nol. Sebaliknya, jika kadar air tanah berada di bawah batas aman maka perlu dilakukan aplikasi irigasi sampai kadar air tanah mencapai kapasitas lapang. Jumlah air yang dibutuhkan ini disimpan ke dalam file “kebutuhan.txt”. Contoh file
“kebutuhan.txt” dapat dilihat pada Lampiran 6.
23
Gambar 24 Grafik Hasil Koreksi Akibat Irigasi 2. Kontrol Irigasi
Menu ini memerlukan file “kebutuhan.txt” sebagai masukan. File ini
berisi angka-angka hasil perhitungan kebutuhan air tanaman dalam satuan mm.
Jika file tersebut bukan file yang dimaksud, maka file “kebutuhan.txt” dapat dimasukan secara manual dengan menekan tombol “Input Data Manual”.
File “kebutuhan.txt” berisi data kebutuhan air dalam satuan (mm). Data-data ini akan digunakan untuk menghitung putaran pompa atau debit yang dibutuhkan.
Gambar 25 Menu Kontrol Irigasi
Data-data mengenai pompa, lama irigasi yang diinginkan, dan luas lahan dimasukan secara manual untuk perhitungan dalam proses kontrol. Data-data ini dijadikan dasar dalam pemilihan debit dan putaran pompa (PWM) yang sesuai. Data spesifikasi pompa adalah head pompa maksimum, daya hisap/dorong, kapisitas pompa, diameter pipa hisap, dan diameter pipa dorong. Perhitungan debit dan putaran pompa berdasarkan pada perbandingan kebutuhan air dengan kapasitas pompa.
Setelah mengisi semua data yang diperlukan, data untuk kontrol akan
24
dalam memory card external berupa SD-Card atau MMC. Penyimpanan file dalam memory card harus di luar, tidak berada di dalam folder.
3. Input Data Koreksi
Menu ini berfungsi untuk memasukkan data selisih antara data nyata di lapangan dengan data simulasi. Data kadar air tanah hasil simulasi dapat dilihat
pada file “output.csv” dalam sistem piranti lunak. Angka koreksi yang dimasukkan melalui menu merupakan angka selisih sehingga dapat berupa bilangan positif atau negatif. Angka koreksi didapatkan dengan cara mengurangkan data penambahan atau pengurangan kadar air tanah akibat adanya pengairan atau hujan aktual dengan data simulasi. Jika hasilnya positif maka keadaan air di lapangan melebihi keadaan simulasi dan sebaliknya jika hasilnya negatif maka keadaan air di lapangan lebih sedikit dari hasil simulasi. Angka koreksi bernilai nol jika keadaan aktual di lapangan sama dengan keadaan hasil simulasi. Setelah data koreksi dimasukkan maka sistem akan menghitung kebutuhan air kembali. Perubahan kadar air tanah dihitung dengan asumsi data lain tidak berubah.
Gambar 26 Menu Input Data Koreksi 4. Lihat Grafik Koreksi
25
Gambar 27 Grafik Hasil Koreksi Menggunakan Menu 5. Bantuan
Menu ini berisi mengenai cara-cara menggunakan piranti lunak serta penjelasan menu-menu dalam piranti lunak.
6. Keluar
Menu ini berfungsi untuk keluar dari sistem piranti lunak.
Keunggulan dan Kelemahan Piranti Lunak
Piranti lunak yang dikembangkan menggunakan data cuaca rata-rata selama 30 tahun. Data dari hasil simulasi ini sudah dapat digunakan untuk proses kontrol. Keadaan di lapangan dapat saja berbeda dengan simulasi sehingga kadar air tanah juga berbeda dari hasil perhitungan. Piranti lunak yang dikembangkan sudah menyediakan menu untuk verifikasi, namun data hasil verifikasi harus dimasukkan kembali ke dalam piranti keras sehingga akan menyusahkan pengguna dalam prosesnya. Jika keadaan di lapangan tidak sesuai dengan hasil simulasi maka setiap hari pengguna harus melakukan update data kontrol. Untuk menghindari hal tersebut, akan lebih baik jika data hasil simulasi dijadikan referensi dan dikombinasikan dengan data sensor. Data sensor menyediakan data nyata di lapangan sedangkan data simulasi menyediakan data dari rata-rata selama 30 tahun. Dengan kombinasi kedua data tersebut, pemberian irigasi diharapkan dapat lebih presisi.
26
SIMPULAN DAN SARAN
Simpulan
Kontrol Pulse Width Modulation (PWM) pada pompa AC sudah berhasil dilakukan dan diujicoba di lapangan. Piranti keras bekerja dengan baik saat diujicoba pada beberapa duty cycle yaitu 0%, 49%, 66%, 85%, 93%, 95%, dan 99%. Duty cycle yang dapat diaplikasikan pada semua jenis pompa agar pompa irigasi dapat bekerja dengan baik adalah diatas 85%. Dalam ujicoba, sistem kendali irigasi yang dikembangkan sudah menggabungkan piranti lunak dan piranti keras dalam prosesnya. Piranti lunak menghasilkan data keperluan irigasi yang dibutuhkan oleh piranti keras untuk melakukan kontrol. Piranti keras dirancang agar dapat melakukan kontrol berdasarkan data dari piranti lunak.
Saran
27
DAFTAR PUSTAKA
Basuki A. 2006. Menggunakan Visual Basic 6.0. Surabaya (ID): Institut Teknologi Sepuluh November.
Galitz WO. 2007. The Essential Guide to User Interface Design, 3rd Edition. Canada (CA) : Wiley Publishing.
Handoko. 1994. Dasar Penyusunan dan Aplikasi Model Simulasi Komputer Untuk Pertanian. Bogor (ID) : Institut Pertanian Bogor.
Lubis RF. 2000. Krisis Air di Kota : Masalah dan upaya pemecahannya (Perbandingan dengan upaya pemecahannya di Jepang). [Internet]. [diunduh 2012 Sept 30]. Tersedia pada : http://www.geotek.lipi.go.id/?p=652.
Madyana AM, Suyantohadi A, Kusuma Y. 2008. Otomasi Pemberian Larutan Nutrisi Terhadap Media Pertumbuhan Tanaman Selada. [Internet]. Seminar Nasional Teknik Pertanian 2008; 2008 Nov 18-19; Yogyakarta, Indonesia. [penerbit tidak diketahui]. [diunduh 2012 Okt 4]. Tersedia di : http://repository.ipb.ac.id/bitstream/handle/123456789/8358/Madyana%20r ev.pdf?sequence=1.
Prayogo R. 2012. Pengaturan Pulse Width Modulation (PWM) dengan PLC. Malang (ID) : Universitas Brawijaya.
Prawiradisastra F. 2007. Kajian Penerapan Produksi Bersih Agroindustri Kerupuk Ikan (Studi Kasus di Perusahaan Kerupuk Dua Gajah, Desa Kenanga, Indramayu – Jawa Barat) [Skripsi]. Bogor (ID) : Institut Pertanian Bogor. Satzinger JW, Jackson RB, Burd SD. System Analys and Design, 4th Edition.
Canada (CA) : Thomson Course Tech.
Sofwan A. 2005. Penerapan Fuzzy Logic Pada Sistem Pengaturan Jumlah Air Berdasarkan Suhu dan Kelembaban. [Internet]. Seminar Nasional Aplikasi Teknologi Informasi 2005 (SNATI 2005); 2005 Jun 18; Yogyakarta, Indonesia. [penerbit tidak diketahui]. [diunduh 2012 Okt 4]. Tersedia di : http://journal.uii.ac.id/index.php/Snati/article/viewFile/1332/1115.
Subrata IDM. 2009. Penuntun Praktikum Mata Kuliah Instrumentasi dan Kontrol. Bogor (ID) : Institut Pertanian Bogor.
28
Lampiran 1 Program Utama Proses Kontrol
/***************************************************** This program was produced by the
CodeWizardAVR V2.05.3 Standard Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com AVR Core Clock frequency : 11.05920 MHz Memory model : Small
29 Lampiran 1 Program Utama Proses Kontrol
30
Lampiran 1 Program Utama Proses Kontrol
/*****************************************************/
31 Lampiran 1 Program Utama Proses Kontrol
/*****************************************************/ void reading()
{
f_mount(0,&fs);
32
34
Lampiran 4 Hasil Pengukuran pada Pompa Hisap
V (volt)
Waktu (detik)
Debit (l/detik)
Debit (l/menit)
Debit (m3/jam)
219 1.75 0.57 34.29 2.06
199 1.80 0.56 33.33 2.00
189 1.82 0.55 32.97 1.98
179 1.88 0.53 31.91 1.91
169 1.94 0.52 30.93 1.86
35 Lampiran 5 Hasil Pengukuran pada Pompa Celup
Tegangan (volt)
Waktu (detik)
Debit (l/detik)
Debit (l/min)
Debit (m3/jam)
219 1.59 0.63 37.74 2.26
208 1.70 0.59 35.29 2.12
169 1.87 0.53 32.09 1.93
159 1.92 0.52 31.25 1.88
149 2.25 0.44 26.67 1.60
139 2.38 0.42 25.21 1.51
129 5.92 0.17 10.14 0.61
36
Lampiran 6 File Output Sistem Piranti Lunak
File “kebutuhan.txt”
37
RIWAYAT HIDUP
Penulis dilahirkan di Tasikmalaya pada tanggal 23 Januari 1991 dari ayah Iji Sarji dan ibu Wasliah. Penulis merupakan anak pertama dari dua bersaudara. Tahun 2009 penulis lulus dari Madrasah Aliyah Al-Amin Kota Tasikmalaya dan pada tahun yang sama penulis lulus seleksi masuk Institut Pertanian Bogor (IPB) melalui jalur Undangan Seleksi Masuk IPB (USMI).