PADA SISTEM PENGAMANAN RUANGAN TERHADAP
BARANG BERHARGA DENGAN
MENGGUNAKAN BAHASA
BASCOM-8051
TUGAS AKHIR
Diajukan untuk melengkapi tugas akhir dan memenuhi syarat memperoleh Ahli Madya
ZULKIFLI TARIGAN 072408015
PROGRAM STUDI DIPLOMA III FISIKA INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2010
DAFTAR ISI
Halaman
PERSETUJUAN ... i
PERNYATAAN ... ii
PENGHARGAAN ... iii
ABSTRAK ... v
DAFTAR ISI ... vi
DAFTAR TABEL ... ix
DAFTAR GAMBAR ... x
BAB 1 PENDAHULUAN 1.1Latar Belakang Masalah... 1
1.2Rumusan Masalah ... 2
1.3Tujuan Penulis ... 3
1.4 Batasan Masalah ... 3
1.5 Sistematika Penulisan ... 4
BAB 2 LANDASAN TEORI 2.1 Perangkat Keras ... 6
2.1.1 Arsitektur Mikrokontroler AT89S51 ... 6
2.1.1.1 Spesifikasi Penting AT89S51 ... 9
2.1.1.2 Pena – Pena Mikrokontroler AT89S51 ... 10
2.1.1.3 Struktur Pengoperasian Port ... 13
2.1.1.4 Proses Pembacaan ... 1
2.1.1.5 Sistem Interupsi ... 19
2.1.1.6 Reset ... 19
2.1.1.7 Serial Interface ... 20
2.1.2 CCTV (Closed Circuit Television) ... 21
2.1.2.1 Dampak Positif dan Negatif CCTV ... 22
2.1.2.2 Bagian-Bagian dari CCTV ... 23
2.1.4 Motor Stepper ... 27
2.1.5 Photodioda ... 31
2.1.6 Infra Merah ... 33
2.1.7 IC Timer 555 dan 567 ... 34
2.1.8 Buzzer ... 38
BAB 3 PERANCANGAN ALAT 3.1 Perancangan Alat ... 40
BAB 4 PENGUJIAN RANGKAIAN DAN ANALISA 4.1 Pengujian Rangkaian ... 62
4.1.6 Pengujian Rangkaian Alarm ... 66
4.2 Analisa ... 67
BAB 5 KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 68
5.2 Saran ... 69
DAFTAR PUSTAKA ... 68
ABSTRAK
Seperti yang kita ketahui bahwa dalam kehidupan sehari-hari banyak pekerjaan yang dilakukan itu sangat rumit, dan pada zaman serba canggih ini merupakan bagian yang sangat penting dalam kehidupan manusia yang untuk dapat berkembang maju yang merupakan tuntutan dibidang elektronika dalam hal pengembangannya. Sebagai mahasiswa Fisika Instrumentasi (D3) Universitas Sumatera Utara, diharapkan dapat mengimplementasikan ilmu pengetahuan dan ketrampilan yang didapat selama duduk dibangku perkuliahan kedalam kehidupan sehari-hari maupun didalam dunia industry. Untuk itu penulis merencanakan sebuah proyek yang berjudul“APLIKASI MIKROKONTROLER AT89S51 SEBAGAI BASIS PADA SISTEM PENGAMANAN RUANGAN TERHADAP BARANG BERHARGA DENGAN MENGGUNAKANBAHASA BASCOM-8051. Tujuan dari perancangan dan pembuatan proyek ini adalah untuk mengaplikasikan teori yang didapat punulis dari perkuliahan dengan membuat suatu alat. Dan tujuan dari pembuatan tugas akhir adalah sebagai salah satu syarat untuk menamatkan program diploma III. Dimana alat ini bisa digunakan di perindustrian yang sangat maju pada zaman sekatang ini.
ABSTRAK
Seperti yang kita ketahui bahwa dalam kehidupan sehari-hari banyak pekerjaan yang dilakukan itu sangat rumit, dan pada zaman serba canggih ini merupakan bagian yang sangat penting dalam kehidupan manusia yang untuk dapat berkembang maju yang merupakan tuntutan dibidang elektronika dalam hal pengembangannya. Sebagai mahasiswa Fisika Instrumentasi (D3) Universitas Sumatera Utara, diharapkan dapat mengimplementasikan ilmu pengetahuan dan ketrampilan yang didapat selama duduk dibangku perkuliahan kedalam kehidupan sehari-hari maupun didalam dunia industry. Untuk itu penulis merencanakan sebuah proyek yang berjudul“APLIKASI MIKROKONTROLER AT89S51 SEBAGAI BASIS PADA SISTEM PENGAMANAN RUANGAN TERHADAP BARANG BERHARGA DENGAN MENGGUNAKANBAHASA BASCOM-8051. Tujuan dari perancangan dan pembuatan proyek ini adalah untuk mengaplikasikan teori yang didapat punulis dari perkuliahan dengan membuat suatu alat. Dan tujuan dari pembuatan tugas akhir adalah sebagai salah satu syarat untuk menamatkan program diploma III. Dimana alat ini bisa digunakan di perindustrian yang sangat maju pada zaman sekatang ini.
BAB 1
PENDAHULUAN
1.1. Latar Belakang Masalah
Tindak kejahatan yang terjadi pada lingkungan gedung perkantoran bahkan di
lingkungan rumah akhir-akhir ini semakin sering terjadi, angka kriminalitas pun
semakin meningkat. Di dalam sebuah gedung perkantoran tentunya banyak benda
penting yang tersimpan di beberapa ruangan. Semakin banyak ruangan yang
menyimpan benda penting maka semakin tinggi kebutuhan sistem keamanan gedung
tersebut. Sepertinya kurang efisien jika tugas itu dikerjakan oleh tenaga manusia.
Berangkat dari masalah di atas penulis membuat tugas akhir dengan judul
“APLIKASI MIKROKONTROLLER AT89S51 SEBAGAI BASIS PADA SISTEM PENGAMANAN RUANGAN TERHADAP BARANG BERHARGA DENGAN MENGGUNAKAN BAHASA BASCOM-8051”
Misalnya dalam suatu gedung terdapat puluhan ruangan, untuk memaksimalkan
keamanan tentunya diperlukan puluhan tenaga manusia untuk berpatroli di setiap
ruangan. Pengawasan keamanan dapat dipermudah dengan menggunakan suatu alat
pada setiap ruangan. Dengan sistematis digambarkan sebagai berikut, dalam setiap
ruangan terdapat alat pendeteksi gerakan dibantu dengan adanya kamera (CCTV).
Gedung tersebut hanya membutuhkan satu ruang pusat keamanan yang bisa
memonitor setiap ruang tersebut. Ketika sensor dari alat ini mendeteksi adanya suatu
gerakan maka alat ini akan mengisyaratkan/menginformasikan ke ruang pusat
keamanan, isyaratnya bisa berbentuk suara dan cahaya (lampu), isyarat hanya terjadi
di ruang pusat keamanan bukan di tempat di mana alat tersebut disimpan. Dengan
adanya isyarat, pihak keamanan di ruang pusat keamanan bisa memonitor dan segera
mengambil
Tujuan dan manfaat dari sistem adalah untuk mengurangi bahkan mencegah tindak
kejahatan pada lingkungan gedung perkantoran atau rumah tinggal.Sehingga barang
1.2. Rumusan Masalah
Berdasarkan uraian di atas, dapat dirumuskan beberapa masalah yang dibahas dalam
tugas akhir ini , yaitu:
1. CCTV berfungsi untuk memonitori semua kegiatan yang terjadi dalam
ruangan.
2. Sensor yang digunakan adalah fotodioda yang akan diletakan disekeliling
etalase tempat penyimpanan barang berharga.
3. Mikroprosesor berfungsi untuk mengelola data dari sensor fotodioda
4. Motor stepper bipolar berfungsi untur menurunkan dan menaikan etalase.
1.3. Tujuan Penulisan
Adapun tujuan dari tugas akhir ini adalah:
1. Membuat suatu Sistem yang dapat merekam sekaligus mengamankan
barang-barang berharga secara wireless.
2. Mengaplikasikan sebuah fotodioda pada sistem pengamanan ruangan.
3. Menggunakan pemrograman bahasa BASCOM-8051 untuk diisikan pada
mikronkontroler.
4. Mengurangi tindak kriminalitas dilingkungan kerja dan masyarakat
5. Pengaplikasian dari intrumentasi elektronika
1.4. Batasan Masalah
Berdasarkan uraian di atas, dapat ditentukan beberapa batasan masalah dalam tugas
akhir ini , yaitu:
.
1. CCTV digunakan sebagai perekam semua kegiatan yg terjadi dalam suatu
ruangan
2. Motor stepper yang digunakan berjenis bipolar
3. Bahasa assembly sebagai program yang digunakan pada mikrokontroler
1.5. Sistematika Penulisan
Untuk mempermudah pemahaman serta pembahasan bagaimana sebenarnya prinsip
kerja sistem pengamanan ruangan terhadap barang barharga dengan menggunakan
mikrokontroler, maka sistematika penulisan laporan tugas akhir ini adalah sebagai
berikut:
BAB 1 PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, rumusan masalah,
tujuan penulisan, batasan masalah, serta sistematika penulisan.
BAB 2 LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan
untuk pembahasan dan cara kerja rangkaian. Teori pendukung yang di
bahas antara lain: CCTV mencakup keutungan CCTV,motor
stepper,bahasa pemograman yang digunakan,serta karakteristik dari
komponen-komponen pendukung.
BAB 3 PERANCANGAN ALAT DAN PROGRAM
Pada bagian ini akan di bahas sistem perancangan alat yaitu: diagram
blok rangkaian, flowchart (diagram alir) dari rangkaian, skematik dari masing-masing sub rangkaian, serta program yang akan diisikan ke
mikrokontroller AT89S51.
BAB 4 PENGUJIAN DAN ANALISA
Dalam bab ini akan dibahas tentang hasil pengujian dan analisa dari
alat untuk membuktikan kebenaran dari alat yang dibuat.
BAB 5 PENUTUP
Bab ini menjelaskan kesimpulan dan saran dari alat ataupun data yang dihasilkan
BAB 2
LANDASAN TEORI
2.1. Perangkat Keras
2.1.1Arsitektur Mikrokontroler AT89S51
Mikrokontroller sebagai teknologi baru yaitu teknologi semi konduktor
kehadirannya sangat membantu dnia elektronika.Dengan arsitektur yang praktis
tetapi memuat banyak kandungan transistor yang terintegrasi,sehingga mendukung
dibuatnya rangkaian elektronika.Mikrokontroler adalah mikrokomputer chip tunggal
yang dirancang secara spesifik untuk aplikasi – aplikasi control bukan untuk
aplikas-aplikasi sserbaguna.Perangkat ini sering digunakan untuk kebutuhan control tertentu
seperti pada sebuah penggerak motor.Pengguna mikrokontroler sangat luas,tidak
hanyak untuk akuisi dan melainkan juga untuk pengendalian di
pabrik-pabrik,kebutuhan peralatan kantor,peralatan rumah tangga,aoutomobile dan
sebagainya.Hal ini disebabkan mikrokontroler merupakan system mikroprosesor
(yang didalamnya terdapat CPU,ROM,RAM dan I/O) yang telah terpadu dalam suatu
chip,selain itu komponennya (AT89S51) mudah dan murah didapatkan di pasaran.
Mikrokontroler,sebagai suatu terobosan teknologi mikroprosesor dan
mikrokomputer, hadir memenuhi kebutuhan pasar (market need) dan teknologi baru.
Sebagai teknologi baru, yaitu teknologi semikonduktor dengan kandungan transistor
yang lebih banyak namun hanya membutuhkan ruang yang kecil serta dapat
diproduksi secara masal (dalam jumlah banyak) membuat harganya menjadi lebih
murah (dibandingkan mikroprosesor). Sebagai kebutuhan pasar, mikrokontroler hadir
untuk memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan
alat-alat bantu bahkan mainan yang lebih baik dan canggih.
Tidak seperti sistem komputer, yang mampu menanganiberbagai macam program
aplikasi (misalnya pengolah kata, pengolah angkadan lain sebagainya),
mikrokontroler hanya bisa digunakan untuk suatu aplikasi tertentu saja (hanya satu
program saja yang bisa disimpan). Perbedaan lainnya terletak pada perbandingan
artinya program-program pengguna disimpan dalam ruang RAM yang relatif besar,
sedangkan rutin-rutin antarmuka perangkat keras disimpan dalam ruang ROM yang
kecil. Sedangkan pada Mikrokontroler, perbandingan ROM dan RAM-nya yang
besar, artinya program kontrol disimpan dalam ROM (bisa Masked ROM atau Flash PEROM) yang ukurannya relatif lebih besar, sedangkan RAM digunakan sebagai tempat penyimpan sementara, termasuk register-register yang digunakan pada
mikrokontroler yang bersangkutan.
Adapun kelebihan dari mikrokontroller adalah sebagai berikut :
1. Penggerak pada mikrokontoler menggunakan bahasa pemograman assembly
dengan berpatokan pada kaidah digital dasar sehingga pengoperasian sistem
menjadi sangat mudah dikerjakan sesuai dengan logika sistem (bahasa assembly ini mudah dimengerti karena menggunakan bahasa assembly
aplikasi dimana parameter input dan output langsung bisa diakses tanpa
menggunakan banyak perintah). Desain bahasa assembly ini tidak menggunakan begitu banyak syarat penulisan bahasa pemrograman seperti
huruf besar dan huruf kecil untuk bahasa assembly tetap diwajarkan.
2. Mikrokontroler tersusun dalam satu chip dimana prosesor, memori, dan I/O
terintegrasi menjadi satu kesatuan kontrol sistem sehingga mikrokontroler
dapat dikatakan sebagai komputer mini yang dapat bekerja secara inovatif
sesuai dengan kebutuhan sistem.
3. Sistem running bersifat berdiri sendiri tanpa tergantung dengan komputer sedangkan parameter komputer hanya digunakan untuk download perintah instruksi atau program. Langkah-langkah untuk download komputer dengan mikrokontroler sangat mudah digunakan karena tidak menggunakan banyak
perintah.
4. Pada mikrokontroler tersedia fasilitas tambahan untuk pengembangan memori
5. Harga untuk memperoleh alat ini lebih murah dan mudah didapat.
Arsitektur perangkat keras 89S51 mempunyai 40 kaki, 31 kaki digunakan untuk
keperluan 4 buah port pararel. 1 port terdiri dari 8 kaki yang dapat di hubungkan
untuk interfacing ke pararel device, seperti ADC, sensor dan sebagainya, atau dapat
juga digunakan secara sendiri setiap bitnya untuk interfacing single bit septerti
switch, LED, dll.
2.1.1.1 Spesifikasi penting AT89S51 :
a. Kompatibel dengan keluarga mikrokontroler MCS51 sebelumnya
b. 8 KBytes In system Programmable (ISP) flash memori dengan
kemampuan 1000 kali baca/tulis
c. tegangan kerja 4-5.0V
d. Bekerja dengan rentang 0 – 33MHz
e. 256x8 bit RAM internal
f. 32 jalur I/0 dapat diprogram
g. 3 buah 16 bit Timer/Counter
h. 8 sumber interrupt
i. saluran full dupleks serial UART
j. watchdog timer
k. dua data pointer
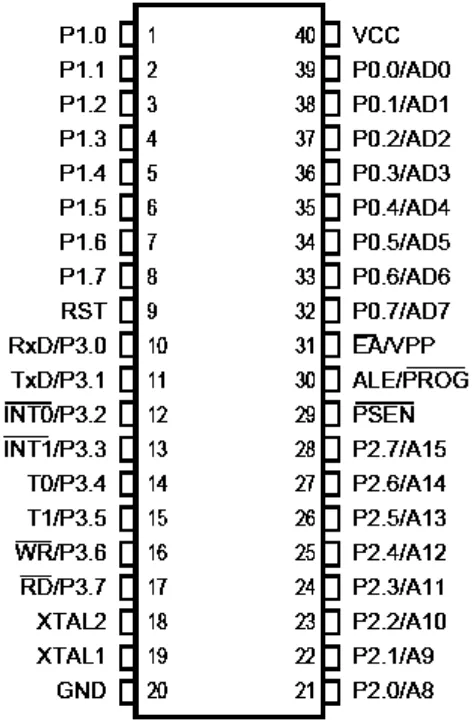
2.1.1.2Pena – Pena Mikrokontrolerr AT89S51
Gambar 2.1.1.2 Konfigurasi Pin Mikrokontroler AT89C51
Susunan pena – pena mikrokontroler AT89S51 dapat dijelaskan sebagai berikut :
1. Pin 1 sampai 8 (Port 1) merupakan port pararel 8 bit dua arah (bidirectional) yang dapat digunakan untuk berbagai keperluan (general purpose).
2. Pin 9 merupakan pin reset, reset aktif jika mendapat catuan tinggi.
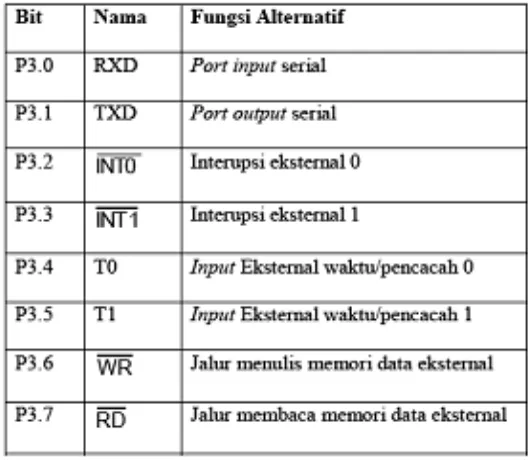
3. Pin 10 sampai 17 (Port 3) adalah port pararel 8 bit dua arah yang memiliki fungsi
Tabel 2.1.1.2 Fungsi masing-masing pin pada port 3
4. Pin 18 sebagai XTAL 2, keluaran osilator yang terhubung pada kristal.
5. Pin 19 sebagai XTAL 1, masukan ke osilator berpenguatan tinggi, terhubung pada
kristal.
6. Pin 20 sebagai Vss, terhubung ke 0 atau ground pada rangkaian.
7. Pin 21 sampai 28 (Port 2) adalah port pararel 8 bit dua arah. Port ini mengirim
byte alamat bila pengaksesan dilakukan pada memori eksternal.
8. Pin 29 sebagai PSEN (Program Store Enable) adalah sinyal yang digunakan untuk membaca, memindahkan program memori eksternal (ROM / EPROM) ke
mikrokontroler (aktif low).
yang diaktifkan saat memprogram internal flash memori pada mikrokontroler (on chip).
10.Pin 31 sebagai EA (External Accesss) untuk memilih memori yang akan digunakan, memori program internal (EA = Vcc) atau memori program eksternal
(EA = Vss), juga berfungsi sebagai Vpp (programming supply voltage) pada saat memprogram internal flash memori pada mikrokontroler.
11.Pin 32 sampai 39 (Port 0) merupakan port pararel 8 bit dua arah. Berfungsi
sebagai alamat bawah yang dimultipleks dengan data untuk mengakses program
dan data memori eksternal.
12. Pin 40 sebagai Vcc, terhubung ke +5 V sebagai catuan untuk mikrokontroler.
2.1.1.3Struktur Pengoperasian Port
Struktur pengoperasian port terdiri atas :
1. Port Input/Output
One chip mikrokontroller ini memiliki 32 jalur port yang dibagi menjadi 4
buah port 8 bit. Masing-masing port ini bersifat bidirectional sehingga dapat
digunakan sebagai input port atau output port. Pada bok diagram AT89C51 dapat
dilihat latch tiap bit pada keempat port : port 0, port 1, port 2, port 3. Masing-masing
jalur port terdiri dari latch, output driver dan input buffer. Port 0 dan port 2 dapat
digunakan sebagai saluran data dan alamat. Port 0 sebagai saluran data, sedangkan
port 2 sebagai saluran data dan alamat sekaligus yang dimultipleks. Untuk
mengakses memory eksternal, port 0 akan mengeluarkan alamat bawah memori
eksternal yang dimultipleks dengan data yang dibaca dan ditulis. Sedangkan port 2
mengeluarkan bagian atas memory eksternal sehingga total alamat semuanya 16 bit.
Khusus untuk port 3 mempunyai fungsi yang lain diluar sebagai port.
Fungsi ini akan berbeda untuk tiap-tiap kaki dengan urutan sebagi berikut :
- Port 3.0 : port input serial, RXD.
- Port 3.1 : port output serial, TXD.
- Port 3.2 : input interupsi eksternal, INT0.
- Port 3.4 : input eksternal untuk timer /counter 0, T0.
- Port 3.5 : input eksternal untuk timer /counter 1, T1.
- Port 3.6 : sinyal tulis memori eksternal, WR.
- Port 3.7 : sinyal baca memori eksternal, RD.
Latch yang digunakan dapat dipresentasikan dengan D-FlipFlop. Data dari
bus internal di-latch saat CPU memberi sinyal tulis ke latch dan output latch
diberikan ke bus internal sebagai respon dari sinyal baca pin dari CPU. Beberapa
instruksi yang berfungsi membaca port mengaktifkan sinyal baca latch dan yang lain
mengaktifkan sinyal baca pin. Port 1, port 2, dan port 3 mempunyai pull-up internal,
sedangkan port 0 dengan open drain. Masing-masing jalur I/O dapat digunakan
sebagai input atau output. Bila digunakan sebagai input, port latch harus 1. Untuk
port 1, 2 dan 3, pin-pin akan di pull-up tinggi oleh pull-up internal, dan bisa juga di
pull-up rendah dengan sumber eksternal.
Port 0 tidak mempunyai pull-up internal. Pull-up fet hanya akan digunakan
saat akses memori eksternal. Jika isi latch diatur pada keadaan 1 maka port ini akan
berfungsi sebagai impedansi tinggi dan jika sebagai output akan bersifat open drain.
Demikian halnya dengan port 2 yang digunakan untuk multipleks data dan alamat 16
bit sebesar 16 Kbyte mempunyai konfigurasi yang sama dengan yang dimiliki port 0.
Sedangkan pada port 3 yang bisa dimanfaatkan untuk kaki kontrol mempunyai
pengaturan fungsi output saja. Pada port ini dilengkapi dengan rangkaian pull-up
internal. Penggunaan port 3 dapat dialamati langsung sebagai kontrol langsung pada
suatu tugas yang dilakukan oleh fungsi yang dimiliki oleh port ini.
2. Timer/Counter
One chip mikrokontroller ini memilik dua timer yang dapat
dikonfigurasikan beroperasi sebagai timer atau counter. Saat berfungsi sebagai timer,
isi register timer ditambah 1 untuk tiap siklus mesin, sedangkan untuk fungsi counter
isi register akan bertambah 1 setiap ada transisi sinyal pada pin input eksternal. Pada
pemanfaatan sebagai counter, sinyal input yang dimaksudkan dapat berupa low level
atau falling edge trigger. Counter akan mencacah setiap masukan yang ada sesuai
Inisialisasi harga awal ini berupa nilai preset negatif counter yang diatur sebelum
counter dijalankan.
Demikian halnya dengan pemanfaatan timer yang memerlukan inisialisasi
awal berupa konstanta waktu yang menentukan sampai berapa lama akan terjadi roll
over. Penentuan harga preset ini berhubungan dengan penggunaan frekuensi clock
dari sistem penentu waktu sampling dari counter untuk mencacah suatu pulsa
masukan dari luar dengan memanfaatkan kontrol interupsi yang ada serta pengaturan
program. Sebagai tambahan pada pemilihan countr/timer, timer 0 dan timer 1
mempunyai 4 buah modul yang dapat dipilih dengan menentukan pasangan bit M0
dan M1 pada register TMOD. Untuk pemilihan timer/counter dikontrol dengan bit
C/T di TMOD.
Mode 0
Pada mode ini timer register dikonfigurasikan sebagai register 13 bit. Ke-13
bit register tersebut terdiri dari 8 bit TH1 dan 5 bit TL1. Selama perhitungan roll over
dari semua 1 ke semua 0, TF1 (Timer Interrupt Flag) di set. Pada dasarnya operasi
mode 0 sama untuk timer 0 dan timer 1
Mode 1
Mode 1 adalah timer register 16 bit dan dapat generator boudrate. Operasi
mode 1 sama dengan mode 0.
Mode 2
Mode 2 adalah timer register dengan konfigurasi 8 bit counter (TL1) auto
reload. Overflow dari TL1 tidak hanya menset TF1 tapi juga mereload TL1
dengan isi TH1. Setelah reload isi TH1 tidak akan berubah. Operasi mode ini
juga sama dengan timer/counter 0.
Mode 3
Pada mode ini timer 1 tidak akan bekerja. Sedangkan timer 0 menjadi 2
counter yang terpisah. TL0 digunakan sebagai bit kontrol untuk timer 0; C/T,
2.1.1.4Proses Pembacaan
Proses pembacaan dapat dianologikan sebagai proses membaca dari halaman tertentu
dari sebuah buku dimana pada proses tersebut dibutuhkan :
1. Halaman dari tulisan yang akan dibaca = Alamat Memori
2. Perintah untuk membaca = Sinyal Read untuk Data dan Sinyal PSEN
untuk kode.
Pembacaan Data dari Memori Eksternal
Instruksi
MOV DPTR,#[address] ; Penentu lokasi data yang akan dibaca
MOVX A,@DPTR ; Perintah pembacaan data sekaligus mengambil
data tersebut dan disimpan ke Akumulator A
Timing
Stuktur Port dan Cara Kerja
Pada dasarnya mikrokontroler Atmel keluarga 51 mempunyai dua kelompok
instruksi untuk mengeluarkan data ke port parallel.
Kelompok instruksi pertama bekerja pada port seutuhnya artinya 8 jalur dari per port bersangkutan,misalnya MOV P3,#0FFh membuat kedelapan jalur port 0 semuanya dalam kondisi logika ‘1’.
Kelompok instruksi kedua berpengaruh pada salah satu jalur atau bit dari port,misalnya instruksi SETB P3.4 artinya men-set bit 4 dari port atau (bit 4 dari port 3 = 1 a xxx1 xxx) atau instruksi CLR P3.3 digunakan untuk menolkan bit 3 dari port 3 (bit dari port 3 = 0 a xxxx 0xxx).
Selain itu port parallel bisa pula dipakai untuk menerima masukan sinyal
digital dari luar mikrokontroler.
Instrksi MOV A,P3 digunakan untuk membaca data digital pada seluruh bit (bit 0 hingga bit 7 = 8 bit)port 3 kemudian menyimpannya di akumlator.
Pembacaan data bisa juga dilakukan hanya pada satu bit port saja,misalnya instruksi
akan kembali melaksanakan instrksi terssebut (lompat ke label $ artinya ke lokasi tersebut lagi),mikrokontroler akan meneruskan kembali instruksi berikutnya jika
P3.7= 1.
Instruksi MOVC A,@A+DPTR
Insturuksi MOVC A,@A+DPTR termassuk mode penglamatan kode tidak langsung (code indirect addressing mode),mempunyai cara penyebutan data dalam
memori program yang dilakukan secara tak langsung.Dalam instruksi ini MOV
diganti dengan MOVC,tambahan huruf C tersebut dimaksud untuk membedakan
bahwainstruksi ini digunakan untuk memori program..Tanda @ digunakan untuk
menandai A+DPTR yang berfungsi untuk menyatakan lokasi memori isinya disalin
ke akumolator A,dalam hal ini nilai yang tersimpan dalam DPTR (Data Pointer
Register 2 byte)ditambah dengan nilai yang tersimpan dalam akumulator A (1 byte)
sama dengan lokasi memori program yang ada.
Instruksi INC DPTR
Agak berbeda dengan instriksi INC A atau INC Rx (x = 0 s/d 7) instruksi ini
adalah satu – satunya instruksi penaikan (increment) yang bekerja pada data 16 bit
yaitu DPTR, yaitu menaikan penunjuk data sebesar 1.Suatu limpahan pada byte
rendah (low order) dari DPTR atau DPL (Data Pointer Low) akan menaikann byte
tinggi (high order) yaitu tersimpan di DPH (Dta Pointer High) sebesar 1.Flag tidak
terpengaruh.Misalnya DPH = 12 dan DPL = Feh,maka instruksi :
INC DPTR
INC DPTR
INC DPTR
Akan menghasilkan DPH = 13h dan DPL = 01H.
2.1.1.5Sistem Interupsi
Mikrokontroller AT89C51 mempunyai 5 sumber interupsi. Dua sumber
merupakan sumber eksternal INT0 dan INT1. Kedua interupsi eksternal dapat aktif
level atau aktif transisi tergantung isi IT0 dan IT1 pada regiter TCON. Interupsi
serial dibangkitkan dengan melakukan operasi OR dan R1 dan T1. Tiap-tiap sumber
interupsi dapat enable atau disable secara software.
Tingkat prioritas semua sumber interupsi dapat diprogram sendiri-sendiri dengan set
atau clear bit pada SFRs IP (Special Function Register’s Interrupt Priority). Interupsi
tingkat rendah dapat diinterupsi oleh interupsi yang mempunyai tingkat lebih tinggi,
tetapi tidak sebaliknya. Walaupun demikian interupsi yang mempunyai tingkat lebih
tinggi tidak bisa menginterupsi sumber interupsi yang lain.
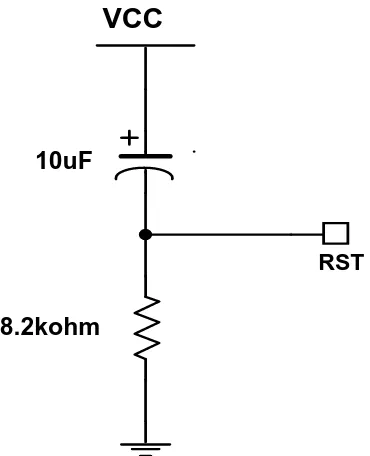
2.1.1.6Reset
Input reset dilakukan melalui pin RST. Reset dilakukan selama 2 siklus
mesin dan pin RST tinggi. Dalam hal ini CPU akan mengaktifkan internal reset,
rangkaian reset dapat dilihat 2.1.1.6.
Karena sinyal reset eksternal tidak sinkron dengan clock internal maka pin RST
diambil pada state 5 (SS) dan fas setiap siklus mesin. Aktifis port tetap dipertahankan
selama 19 priode osilator sesudah logika 1 diambil pada kaki RST.
10uF
8.2kohm
VCC
RST
Gambar 2.1.1.6 Power On Reset
2.1.1.7Serial Interface
Selain komunikasi data paralel melalui port-port yang dimiliki oleh
shift register atau sebagai universal asynchronous receiver transmitter tergantung
pada pengaturan mode yang terdapat pada register SCON. Kedua register penerima
dan pengirim dari port serial diakses di register SBUF.
2.1.2CCTV (Closed Circuit Television)
CCTV (Closed Circuit Television) atau dalam bahasa Indonesianya yaitu Telivisi
dengan Sirkuit Tertutup adalah perangkat peralatan pengawas (surveillance) yang
memonitor keadaan sekitar melalui kamera pengintai yang terdiri dari kamera dan
system DVR (Digital Video Recording).
CCTV memiliki kamera yang akan mentransmisikan image video ke tempat yang
spesifik dan jumlah televisi yang terbatas. Perbedaannya dengan bentuk televisi
CCTV tidak dapat menerima monitor lain, bahkan jika di area yang sama sekalipun,
kecuali monitor tersebut telah masuk ke dalamarea CCTV.
Cara Menggunakan CCTV dan Mengenal Teknologi suatu Network Camera.
Suatu Network Camera umumnya memiliki alamat IP tersendiri serta fungsi-fungsi
tertentu yang sifatnya sudah built-in untuk mengatur system komunikasi jaringan.
Semua yang dibutuhkan untuk dapat melihat tampilan gambar melalui jaringan sudah
terbentuk dalam satu unit tertentu.
Komponen kamera akan menangkap obyek gambar yang akan ditransformasikan
menjadi sinyal-sinyal elektronik, dan selanjutnya sinyal-sinyal tersebut akan
dikonversikan dari format analog menjadi format digital dan ditransfer melalui
sebuah komputer dan dikompresi untuk selanjutnya dikirim melalui jaringan.
2.1.2.1 Dampak Positif dan Negatif CCTV
System CCTV biasanya digunakan untuk alasan keamanan atau komersial
ketika orang memerlukannya bila berada di lingkungan yang berbahaya namun
CCTV juga memiliki dampak negatif.
Dampak Positif dari CCTV :
2. Meningkatkan produktivitas dan efisiensi kerja karyawan
3. Dapat lengkapi dengan option rekaman suara
4. Pengawasan melalui tv monitor oleh petugas keamanan secara real
time.
5. Melihat rumah anda sewaktu anda ke luar kota atau keluar negeri
6. Anda dapat melihat lokasi pabrik dengan kamera dari rumah
7. Mendapatkan bukti otentik jika terjadi peristiwa yang tidak
dikehendaki
8. Meningkatkan produktivitas
Dampak Negatif dari CCTV :
1 .Dampak negatif dari CCTV yakni apabila alarm tidak berfungsi
secara lancar maka proteksi dan keamanan akan mudah dijebol oleh
para penjahat.
2. Membuat para pemontering menjadi pemalas, contohnya Melakukan
kegiatan pengawasan para pekerja/pegawai secara langsung akan
berkurang dan komunikasi antara atasan dan pegawai berkurang.
2.1.2.2 Bagian – Bagian Dari CCTV
Suatu CCTV SYSTEM terdiri dari beberapa komponen yang saling berkaitan untuk membantu pemiliknya memantau kejadian secara real time ataupun melakukan play-back kejadian yang telah lampau. Untuk dapat mencapai fungsi secara optimum sebuah CCTV System umumnya terdiri dari beberapa komponen
seperti:
CCTV Camera (Kamera Pemantau): alat yang yang ditempatkan pada lokasi yang akan dimonitor untuk menangkap gambar video. Gambar video
Recorder (Alat Perekam): alat yang digunakan untuk merekam video yang dikirim oleh CCTV Camera. Perekaman dapat dilakukan secara analog
ataupun digital.
Monitor: alat yang dipakai melihat gambar video secara real time ataupun video hasil rekaman. Monitoring dapat dilakukan secara lokal (pada area
gedung) ataupun secara remote
CCTV Motorized Controller: alat ini digunakan untuk menggerakkan PTZ (Pan Tilt Zoom) motor yang terdapat pada CCTV Camera.
Dengan menggabungkan komponen – komponen di atas maka dapat dibuat sebuah
CCTV System. Terdapat 2 macam konfigurasi CCTV System yang banyak
digunakan pada saat ini:
Konfigurasi CCTV Camera Analog: pada konfigurasi ini gambar video yang dihasilkan oleh kamera berupa signal analog yang ditransmisikan
melalui Coaxial Cable, video analog ini kemudian ditangkap oleh recorder dan di transformasi menjadi bentuk data digital sebelum disimpan ke dalam
Hard Disk. Digital Video Recorder dapat mengirimkan video digital ini melalui jaring network
Gbr 2.1.2.2 (a) Analog CCTV System Diagram
Konfigurasi IP CCTV Camera (Network Camera): pada konfigurasi ini gambar video yang dihasilkan oleh network camera sudah berbentuk digital dan dikirim langsung ke jaringan network. Network Recorder yang terhubung
CCTV Camera dan menyimpannya ke dalam Hard Disk. Komputer yang
terhubung ke network dapat mengakses video langsung dari kamera ataupun
mengakses hasil rekaman pada Network Recorder
Gbr 2.1.2.2 (b) IP CCTV (Network) System Diagram
Kedua konfigurasi di atas memiliki kelebihan dan kekurangan. Konfigurasi
pertama yang menggunakan analog camera akan memerlukan infrastruktur kabel
yang lebih banyak dan lebih mahal, gambar video yang disimpan juga mungkin
sudah mengalami perubahan karena faktor jarak dan interferensi. Permasalahan ini
tidak dialami bila menggunakan IP Camera karena data output sudah berbentuk
digital dan hanya menggunakan satu kabel data (UTP Cat5). Akan tetapi biaya untuk
IP Camera saat ini jauh lebih tinggi dibandingkan harga Analog Camera, disamping
itu IP
Camera juga memerlukan infrastruktur network yang lebih baik untuk
menunjang streaming data dari beberapa IP Camera secara bersamaan.
2.1.3 Perancangan Power Supply (PSA)
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada.
Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt,
keluaran 5 volt digunakan untuk mensupplay tegangan ke seluruh rangkaian,
sedangkan keluaran 12 volt digunakan untuk mensuplay tegangan ke relay.
Gbr 2.1.3 Rangkaian Power Supplay (PSA)
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan tegangan
dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan disearahkan
dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan diratakan oleh
kapasitor 3300 μF.
Dua buah dioda berikutnya berfungsi untuk menahan arus yang ada pada regulator
agar tidak balik jika terjadi penarikan arus sesaat dari tegangan 12 volt. Regulator
tegangan 5 volt (7805) digunakan agar keluaran yang dihasilkan tetap 5 volt
walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai
indikator apabila PSA dinyalakan. Tegangan 12 volt DC langsung diambil dari
keluaran 2 buah dioda penyearah.
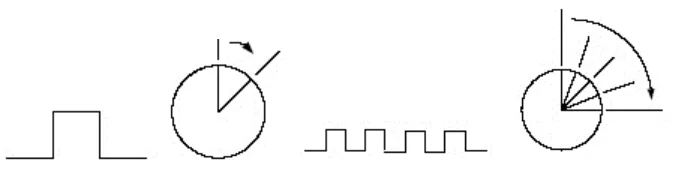
2.1.4 Motor Stepper
Motor stepper adalah motor listrik yang dikendalikan dengan pulsa-pulsa digital,
bukan dengan memberikan tegangan yang terus-menerus. Deretan pulsa
diterjemahkan menjadi putaran shaft, dimana setiap putaran membutuhkan jumlah
pulsa yang ditentukan. Satu pulsa menghasilkan satu kenaikan putaran atau step,
yang merupakan bagian dari satu putaran penuh. Oleh karena itu, perhitungan jumlah
pulsa dapat diterapkan untuk mendapatkan jumlah putaran yang diinginkan.
Perhitungan pulsa secara otomatis menujukkan besarnya putaran yang telah
Ketepatan kontrol gerak motor stepper terutama dipengaruhi oleh jumlah step tiap
putaran; semakin banyak jumlah step, semakin tepat gerak yang dihasilkan. Untuk
ketepatan yang lebih tinggi, beberapa driver motor stepper membagi step normal
menjadi setengah step(half step) atau mikro step.
Pada dasarnya motor stepper dikelompokkan menjadi 3 jenis, yaitu:
a. Permanent Magnet (PM)
Sesuai namanya, Motor stepper berjenis PM memiliki rotor berupa magnet
permanen. Biasanya memilki kecepatan rendah, alat dengan torsi rendah dan sudut
langkah besar, bisa 45 atau 90 derajat
Gbr 2.1.4 magnet Permanen
Gambar diatas merupakan magnet permanent sederhana 90 derajat motor magnet
permanent dengan empat phase (AD).
b. Variable Reluctance (VR)
Motor stepper jenis ini memiliki bentuk rotor yang unik yaitu berbentuk silinder dan
pada semua unitnya memiliki gerigi yang memiliki hubungan dengan kutub-kutub
stator.Perbedaan motor stepper berjenis PM dengan VR yaitu motor berjenis VR
c. Permanent Magnet – Hybrid (PM-H)
Permanent magnet hybrid merupakan penyempurnaan motor stepper di mana motor
stepper ini memiliki kecepatan 1000step/detik namun juga memiliki torsi yang cukup
besar sehingga dapat dikatakan bahwa PM-H merupakan motor stepper kombinasi
antara PM dan VR motor stepper.
Dilihat dari lilitannya motor stepper terbagi menjadi 2 jenis yaitu :
a. Motor Stepper Unipolar
Motor stepper unipolar terdiri dari dua lilitan yang memiliki center tap. Center tap
dari masing masing lilitan ada yang berupa kabel terpisah ada juga yang sudah
terhubung didalamnya sehingga center tap yang keluar hanya satu kabel. Untuk
motor stepper yang center tapnya ada pada masing – masing lilitan kabel inputnya
ada 6 kabel. Namun jika center tapnya sudah terhubung di dalam kabel inputannya
hanya 5 kabel. Center tap dari motor stepper dapat dihubungkan ke pentanahan atau
ada juga yang menghubungkannya ke +VCC hal ini sangat dipengaruhi oleh driver
yang digunakan. Sebagai gambaran dapat dilihat konstruksi motor stepper unipolar
pada gambar berikut:
Gbr 2.1.4 Konstruksi Motor Stepper Unipolar
b. Motor Stepper Bipolar
Motor stepper bipolar memiliki dua lilitan perbedaaan dari tipe unipolar adalah
bahwa pada tipe bipolar lilitannya tidak memiliki center tap. Keunggulan tipe bipolar
ukuran yang sama. Pada motor stepper tipe ini hanya memiliki empat kabel masukan.
Namun ntuk menggerakan motor stepper tipe ini lebih rumit jika dibandingkan
dengan menggerakan motor stepper tipe unipolar. Sebagai gambaran dapat dilihat
konstruksi motor stepper bipolar pada gambar berikut :
Gbr 2.1.4 konstruksi Motor Stepper Bipolar
Motor Stepper adalah motor DC yang gerakannya bertahap (step per step) dan memiliki akurasi yang tinggi tergantung pada spesifikasinya. Setiap motor stepper
mampu berputar untuk setiap stepnya dalam satuan sudut (0.75, 0.9, 1.8), makin keil
sudut per step-nya maka gerakan per step-nya motor stepper tersebut makin presisi.
Motor stepper banyak digunakan untuk aplikasi-aplikasi yang biasanya cukup
menggunakan torsi yang kecil, seperti untuk penggerak piringan disket atau piringan.
Dalam hal kecepatan, kecepatan motor stepper cukup cepat jika dibandingkan
dengan motor DC.
Kecepatan motor stepper pada dasarnya ditentukan oleh kecepatan pemberian
data pada komutatornya. Semakin cepat data yang diberikan maka motor stepper
akan semakin cepat pula berputarnya. Pada kebanyakan motor stepper kecepatannya
dapat diatur dalam daerah frekuensi audio dan akan menghasilkan putaran yang
cukup cepat.
2.1.5 PhotoDioda
Fotodioda adalah suatu jenis dioda yang resistansinya berubah-ubah kalau cahaya
yang jatuh pada dioda berubah-ubah intensitasnya. Dalam gelap nilai tahananya
sangat besar hingga praktis tidak ada arus yang mengalir. Semakin kuat cahaya yang
semakin besar. Fotodioda ini digunakan terutama sebagai saklar elektronik yang
bereaksi akibat perubahan intensitas cahaya.
Fotodioda merupakan sensor cahaya semikonduktor yang dapat mengubah
besaran cahaya menjadi besaran listrik. Fotodioda merupakan sebuah dioda dengan
sambungan pn yang dipengaruhi cahaya dalam kerjanya. Cahaya yang dapat
dideteksi oleh fotodioda ini mulai dari cahaya infra merah, cahaya tampak, ultra
ungu sampai dengan sinar-X. Aplikasi fotodioda mulai dari penghitung kendaraan di
jalan umum secara otomatis, pengukur cahaya pada kamera serta beberapa peralatan
di bidang medis.
Gbr 2.1.5 simbol Photodioda
Prinsip kerja dari fotodioda jika sebuah sambungan-pn dibias maju dan
diberikan cahaya padanya maka pertambahan arus sangat kecil sedangkan jika
sambungan pn dibias mundur arus akan bertambah cukup besar. Cahaya yang
dikenakan pada fotodioda akan mengakibatkan terjadinya pergeseran foton yang
akan menghasilkan pasangan electron-hole dikedua sisi dari sambungan. Ketika
elektron-elektron yang dihasilkan itu masuk ke pita konduksi maka elektron-elektron
itu akan mengalir ke arah positif sumber tegangan sedangkan hole yang dihasilkan
mengalir ke arah negatif sumber tegangan sehingga arus akan mengalir di dalam
rangkaian. Besarnya pasangan elektron ataupun hole yang dihasilkan tergantung dari
besarnya intensitas cahaya yang dikenakan pada fotodioda.
2.1.6 Sensor Inframerah
Sensor adalah peralatan yang digunakan untuk mengubah suatu besaran fisik
menjadi besran listrik sehingga dapat dianalisa demgnan rangkain tertentu,hamper
seluruh rangkaian elektronika mempunyai sensor didalamnya. Prinsip kerja dari alat
ini adalah mengubah energi dari foton menjadi electron. Idelnya satu foton dapat
panjang gelombang lebih panjang dari cahaya tampak, tetapi lebih pendek dari
radiasi gelombang radio. Radiasi inframerah jangkuan tiga “orde” dan memiliki
panjang gelombang antara 700 nm dan 1 mm.
Infra merah banyak digunakan pada komunikasi jarak dekat,contoh paling
umum pemakaian IR adalah pada remote control. Gelombang IR mudah
dibuat,harganya rrlatif murahdan lebih bersifat directional tak dapat menembus
tembok atau benda gelap serta memiliki fluktuasi daya tinggi dan dapat diinteferensi
oleh cahaya matahari. Pengirim dan penerima IR menggunakan Emiting Dioda
(LED) dan Photo Sensitive Diode (PSD). Infra merah cukup efektif digunakan jika
alat yang dikontrol terdapat pada lokasi yang sama dan tidak terlalu jauh (kuang
lebih 10 meter dan tidak ada penghalang). Berneda dengan LED biasa,LED Infra
merah pada penggunaanya dapat diaktifkan dengan :
1. Tegangan DC untuk transmisi/sensor jarak dekat
2. Tegangan AC (30 – 40 KHz) untuk transmisi/sensor jarak jauh.
Komponen ini akan mengubah nergi cahaya,dalam hal ini cahaya infra merah
menjadi pulsa – pulsa sinyal. Komponen ini harus mampu mengumpulkan sinyal
infra merah sebanyak mungkin, sehingga pulsa-pulsa sinyal listrik yang dihasilkan
kualitasnya cukup baik. Semakin besar intensitas infra merah yang diterima maka
sinyal pulsa listrik yang dihasilkan akan baik, jika sinyal infra merah yang diterima
intensitasnya lemah maka infra merah tersebut harus mempunyai pengumpul cahaya
(light collector) yang cukup baik dan sinyal pulsa yang dihasilkan oleh sensor infra
merah ini harus dikuatkan.
Prinsip utama dari rangkaian sensor ini seperti layaknya sebuah saklar yang
memberikan perubahan tegangan apabila terdapat penghalang diantara tranceiver dan
receiver. Sensor ini memiliki dua buah piranti yaitu rangkaian pembangkit/pengirim
(Led Infra Merah) dan rangkaian penerima (Fotodioda). Rangkaian
pembangkit/pengirim memancarkan sinar infra merah, kemudian pancarannya
diterima oleh penerima (fotodioda) sehingga bersifat menghantar akibatnya tegangan
mendapat pancaran sinar infra merah maka akan mnghasilkan tegangan.
2.1.7 IC TIMER 555 DAN 567
Timer 555 merupakan sebuah IC timer yang bekerja berdasar rangkaian RC dan
komparator yang dirangkai dengan komponen digital (R-Sflip-flop). 555 yang
pertama diproduksi oleh Signetics yaitu tipe SE-555 yang bekerja pada -55°C s.d.
125°C dan NE-555 yang bekerja pada 0°C-70°C. Kemudian 555 diproduksi dengan
desain yang berbeda meliputi LM555, 556(versi dual), dan LMC-555(versi CMOS).
Timer 555 beroperasi pada power supply dc +5v s.d. +18V dengan stabilitas
temperatur 50ppm/°C(0,005%/°C). Output 555 dapat berupa arus sink/source hingga
200mA. IC 555 kompatibel dengan komponen-komponen TTL, CMOS, op-amp,
transistor dan jenis IC linear lain.
Keluaran gelombang kotak yang dihasilkan dapat memiliki variasi duty cycle mulai
dari 50 – 99.9% dan frekuensi kurang dari 0,1Hz sampai dengan lebih dari 100KHz.
Rangkaian 555 terdiri atas dua buah komparator tegangan (COMP1 dan COMP2),
sebuah flip-flop kontrol R-S(reset/set) yang dapat direset dari luar melalui pin 4,
sebuah penguat pembalik output (A1), dan sebuah transistor discharge (Q1). Level bias kedua kompartor ditentukan oleh resistor-resistor pembagi tegangan (Ra, Rb,
dan Rc) yang terdapat antara Vcc dan ground. Input inverting komparator1 diberi
masukan 2/3Vcc dan input noninverting dari komparator2 diberi masukan 1/3Vcc.
Berikut adalah fungsi dari masing-masing pin :
Ground (pin1)
Pin ini merupakan titik referensi untuk seluruh sinyal dan tegangan pada rangkaian
Trigger (pin2)
Masukan trigger biasanya dijaga pada tegangan lebih dari 1/3Vcc agar output pin3
dari IC555 ’low’. Jika masukan trigger menjadi ’low’ (<1/3Vcc) mengakibatkan
output pin3 menjadi ’high’. Otput pin3 akan bertahan ‘high’ selama masukan
triggernya ‘low’, tetapi tidak serta merta menjadi ‘low’ ketika pin2 kembali ‘high’. Output (pin3)
Output pada 555 dapat mengalir arus baik sinking(masuk) maupun sourcing(keluar)
hingga 200mA.
Reset (pin4)
Pin reset ini terhubung dengan input preset dari R-S flip-flop kontrol. Jika pin4 diberi
masukan ’low’ output dari 555 akan serta merta menjadi ’low’. Biasanya, jika tidak
digunakan pin4 dihubungkan ke Vcc untuk menjaga agar tidak terjadi keadaan ’low’.
Control Voltage (pin5)
Biasanya diberi 2/3Vcc (hasil dari pembagi tegangan). Dengan memberi sumber
tegangan eksternal atau dengan menghubungkan sebuah resistor ke ground akan
mengubah duty cycle outputnya.
TreshHold (pin6)
Pin ini terhubung pada input noninverting komparator1 untuk memonitor tegangan
kapasitor pada rangkaian RC eksternal.
Discharge (pin7)
Pin ini terhubung ke kaki kolektor transistor NPN Q1 dan kaki emiter Q1 terhubung
ke groud, basis Q1 terhubung dengan Qnot R-S flip-flop.
Vcc(pin8)
Dengan menggunakan pasangan NE 555 dan LM 567 kita dapat membuat suatu
sistem pengendali jarak jauh melalui media cahaya infra merah. Sistem ini bekerja
berdasarkan pendeteksian frekuensi dari sinyal yang dipancarkan. Sehingga frekuensi
sinyal pada rangkaian pemancar (NE 555, dapat juga menggunakan LM 567 sebagai
pembangkit frekuensinya) haruslah sama dengan frekuensi dekodernya.
Gbr 2.1.7(a) Rangkaian Pemancar Infra Merah
Seperti telah disebutkan di atas, bagian penerima pun harus memiliki deteksi
frekuensi yang sama dengan frekuensi yang dipancarkan oleh rangkaian NE 555.
Untuk mempermudah proses tunning, maka R1 pada bagian penerima adalah
variabel resistor. Sedangkan pada bagian pemancar adalah bernilai tetap. Ketika
rangkaian telah siap, maka supaya sistem dapat bekerja dengan baik, langkah
pertama yang dilakukan adalah melakukan tunning, dengan cara bagian pemancar
dihidupkan terus menerus, sedangkan R1 pada bagian penerima diatur nilainya
sampai dapat mendeteksi sinyal pemancar (dapat diketahui dengan reaksi relay yang
Gbr 2.1.7 (b) Rangkaian Penerima Infra Merah
2.1.8Buzzer
Rangkain alarm adalah rangkaian yang berfungsi untuk memberikan sinyal
informasi ketika terjadi sebuah kaeadaan dimana saat photodiode yang terletak
disekitar etalase terganggu.Dalam proyek ini buzzer digunakan sebagai sebagai
BAB 3
PERANCANGAN ALAT DAN PERANCANGAN PROGRAM
3.1 Perancangan Alat
3.1.1 Diagram Blok
Secara garis besar,diagram blok dari rangkaian proyek Tugas Akhir ini
ditunjukkan pada gambar 3.1 berikut ini :
Gambar 3.1.1 Diagram Blok Rangkaian
Desain rangkaian diatas terdiri dari :
1. Rangkaian sensor gerak berfungsi untuk mendeteksi adanya gerakan yang
menganggu sensor.
2. Limit switch berfungsi untuk membatasi gerakan / putaran motor stepper.
3. Saklar manual berfungsi untuk memutar motor keatas atau kebawah dengan
cara menekan saklar.
4. Jembatan H berfungsi sebagai driver yang akan menggerakkan motor stepper
berdasarkan logika yang diterimanya dari mikrokontroler.
5. Mikrokontroler berfungsi sebagai otak rangkaian
Prinsip Kerja Diagram Blok
Pada kedaan awal system diaktifkan,dimana proyek Tugas Akhir ini penulis
menggunakan sensor gerak (photodioda) sebagai pendeteksi gerak.Rangkaian sensor
terdiri dari 12 sensor gerak.Ketika salah satu sensor terganggu maka sinyal yang
terdeteksi oleh sensor tersebut akan dikirim ke Mikrokontroler AT89S51 yang
berfungsi sebagai basis (otak) pada system ini.Dan berdasarkan perintah yang telah
terprogram pada Mikrokontroler AT89S51 maka mikrokokontroler tersebut akan
memberikan perintah pada jembatan H agar motor stepper berputar untuk
menurunkan etalase ,motor stepper berhenti turun jika telah mengenai limit swith
bawah.Untuk menaikan etalase kembali cukup dengan menekan saklar manual
naik.secara otomatis motor stepper akan berputar naik dan berhenti jika mengenai
limit switch atas.
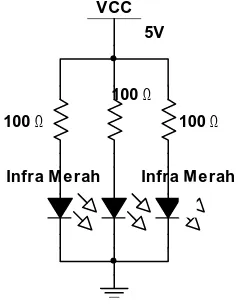
3.1.2 Rancangan Rangkaian Sensor Inframerah
Untuk mendeteksi ada tidaknya benda yang melintas di atas atau di samping
alat, digunakanlah sensor inframerah. Sensor terdiri dari LED pemancar inframerah
dan sebuah photodioda.
Setiap pantulan inframerah yang diterima oleh photodioda akan diolah dan
dijadikan data digital, sehingga bila photodioda mendapatkan pantulan
dari pemancar inframerah, maka akan mengirimkan sinyal low ke mikrokontroler
AT89S51. Kondisi tersebut menandakan bahwa ada benda yang melintas di depan
sensor. Sebaliknya, ketika tidak ada benda yang melintas di depan sensor, maka
VCC
5V
Infra Merah
100 100
Infra Merah 100
Rangkaian pemancar inframerah tampak seperti gambar di bawah ini:
Gambar 3.1.2 (a) Rangkaian Pemancar inframerah
Pada rangkaian di atas digunakan 3 buah LED inframerah yang diparalelkan,
dengan demikian maka intensitas yang dipancarkan oleh inframerah semakin kuat,
karena merupakan gabungan dari 3 buah LED inframerah. Resistor yang digunakan
adalah 100 ohm sehingga arus yang mengalir pada masing-masing LED inframerah
adalah sebesar:
5
0, 05 50
100
V
i A atau mA
R
Dengan besarnya arus yang mengalir ke LED inframerah, maka intensitas pancaran
inframerah akan semakin kuat, yang menyebabkan jarak pantulannya akan semakin
jauh.
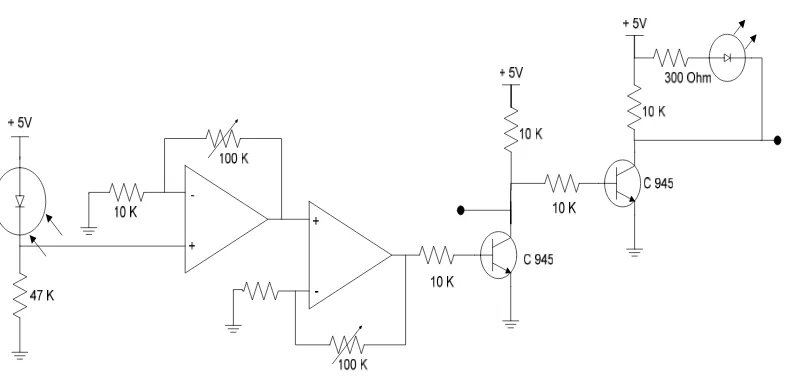
Pantulan dari sinar inframerah akan diterima oleh potodioda, kemudian akan
diolah oleh rangkaian penerima agar menghasilkan data biner, dimana jika potodioda
menerima pantulan sinar inframerah maka output dari rangkaian penerima ini akan
mengeluarkan logika low (0), namun jika potodioda tidak menerima pantulan sinar
inframerah, maka output dari rangkaian penerima akan mengeluarkan logika high
Gambar 3.1.2 (b) Rangkaian Sensor Inframerah
Rangkaian ini menggunakan IC LM 358 sebagai penguat tegangan yang
dihasilkan photodioda. Satu buah IC ini memiliki dua penguat operasional (op-amp).
Pada rangkaian ini, kedua op-amp tersebut digunakan. Sehingga sinyal dari
photodioda mengalami dua kali penguatan.
Sesuai gambar, maka besar penguatan op-amp tergantung pada besarnya
tahanan variable yang digunakan. Pada prakteknya, tahanan variable tersebut ditrim
pada kisaran harga 20KOhm, sehingga besar penguatan op-amp adalah:
kali
A
KK2
10 20
Dari hasil pengukuran, tegangan pada photodiode pada saat terkena pantulan
inframerah adalah sekitar 1,1 Volt dan menjadi sekitar 0,03 Volt ketika tidak terkena
pantulan inframerah.
Tegangan tersebut diumpankan pada op-amp dengan faktor penguatan 2 kali,
sehingga tegangan keluarannya pada saat terkena sinar inframerah sekitar 2,2 Volt,
sedangkan saat tidak terkena sinar inframerah sekitar 0,06Volt. Namun, tegangan ini
masih diumpankan lagi pada op-amp yang kedua. Dengan faktor penguatan yang
saat tidak terkena inframerah sekitar 0,12 Volt. Tegangan inilah yang selanjutnya
diumpankan ke basis transistor C945.
Transistor akan aktif ketika tegangan basisnya lebih besar dari 0,7 Volt.
Maka, ketika basisnya mendapat tegangan 4,4 Volt (saat photodioda terkena sinar
inframerah), transistor aktif. Aktifnya transistor ini akan menyebabkan
mikrokontroler mendapatkan logika low dan LED indikator akan mati. Hal
sebaliknya akan berlaku ketika photodioda tidak mendapatkan pantulan sinar
inframerah.
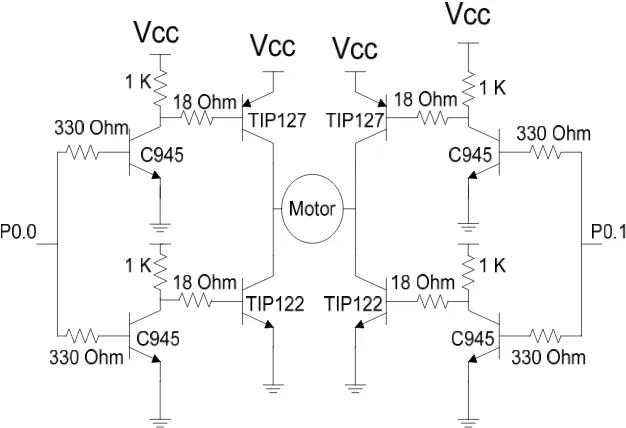
3.1.3 Perancangan Driver penggerak Motor Stepper (Jembatan H)
Rangkaian untuk mengendalikan perputaran motor stepper pada alat ini
adalah sebuah rangkaian yang dikenal dengan jembatan H. Jembatan H ini terdiri
dari 4 buah transistor, dimana 2 buah transistor bertipe NPN dan 2 buah transistor
lagi bertipe PNP. Ke-4 transistor ini dirangkai sedemikian rupa sehingga dengan
memberikan sinyal low atau high pada rangkaian maka perputaran motor dapat
diatur. Gambar rangkaiannya ditunjukkan pada gambar berikut ini:
Pada rangkaian di atas, jika P0.0 diset high yang berarti P0.0 mendapat
tegangan 5 volt, maka kedua transistor tipe NPN C945 yang disebelah kiri akan
aktip. Hal ini akan membuat kolektor dari kedua transistor C945 itu akan mendapat
tegangan 0 volt dari ground. Kolektor dari transistor C945 yang berada di sebelah
kiri atas diumpankan ke basis dari transistor tipe PNP TIP 127 sehingga basis dari
transistor TIP 127 mendapatkan tegangan 0 volt yang menyebabkan transistor ini
aktip (transistor tipe PNP akan aktip jika tegangan pada basis lebih kecil dari 4,34
volt). Aktifnya transistor PNP TIP 127 ini akan mengakibatkan kolektornya
terhubung ke emitor sehingga kolektor mendapatkan tegangan 5 volt dari Vcc.
Sedangkan kolektor dari transistor C945 yang berada di sebelah kiri bawah
diumpankan ke basis dari transistor tipe NPN TIP 122 sehingga basis dari transistor
TIP 122 mendapatkan tegangan 0 volt yang menyebabkan transistor ini tidak aktip
(transistor tipe NPN akan aktip jika tegangan pada
basis lebih besar dari 0,7 volt). Karena transistor TIP 122 ini tidak aktip, maka
kolektornya tidak terhubung ke emitor, sehingga kolektor tidak mendapatkan
tegangan 0 volt dari ground.
Karena kolektor TIP 122 dihubungkan dengan kolektor TIP 127 yang
mendapatkan tegangan 5 volt dari Vcc, maka kolektor dari TIP 122 juga
mendapatkan tegangan yang sama.
Pada rangkaian di atas, jika P0.1 diset low yang berarti P0.1 mendapat
tegangan 0 volt, maka kedua transistor tipe NPN C945 yang disebelah kanan tidak
akan aktif. Hal ini akan membuat kolektor dari kedua transistor C945 itu akan
mendapat tegangan 5 volt dari Vcc. Kolektor dari transistor C945 yang berada di
sebelah kanan atas diumpankan ke basis dari transistor tipe PNP TIP 127 sehingga
basis dari transistor TIP 127 mendapatkan tegangan 5 volt yang menyebabkan
transistor ini tidak aktif. Akibat transistor PNP TIP 127 tidak aktip maka
kolektornya tidak terhubung ke emitor sehingga kolektor tidak mendapatkan
tegangan 5 volt dari Vcc, tetapi mendapatkan tegangan yang berasal dari transistor
TIP 122 yang berada di bawahnya.
Sedangkan kolektor dari transistor C945 yang berada di sebelah kiri bawah
TIP 122 mendapatkan tegangan 5 volt yang menyebabkan transistor ini menjadi
aktif.
Karena transistor TIP 122 ini menjadi aktif, menyebabkan kolektornya terhubung ke
emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 yang mendapatkan teganagan 0 volt dari ground
dihubungkan dengan kolektor TIP 127, maka kolektor dari TIP 127 juga
mendapatkan tegangan yang sama. Hal ini menyebabkan kaki motor sebelah kanan
mendapatkan tegangan 0 volt (polaritas negatip).
Prinsip tersebut digunakan pada saat menghidupkan motor stepper. Prinsip
kerja dari motor stepper yaitu pembangkitan medan magnet untuk memperoleh gaya
tarik ataupun gaya lawan dengan menggunakan catu tegangan DC pada lilitan/
kumparannya. Bila kumparan mendapatkan logika ‘1’ – maka akan dibangkitkan
kutub magnet yang berlawanan dengan kutub magnet tetap pada rotor. Sehingga
posisi kutub magnet rotor akan ditarik mendekati lilitan yang menghasilkan kutub
magnet berlawanan tadi. Bila langkah berikutnya lilitan yang bersebelahan diberi
tegangan, sedangkan catu tegangan lilitan sebelumnya dilepas, maka kutub magnet
tetap pada rotor itu akan berpindah posisi menuju kutub magnet lilitan yang
dihasilkan. Berarti telah terjadi gerakan 1 step. Bila langkah ini diulang
terus-menerus, dengan memberikan tegangan secara bergantian kelilitan-lilitan yang
bersebelahan, maka rotor akan “berputar”.
Logika perputaran rotor tersebut dapat dianalogikan secara langsung dengan
data ‘0’ atau ‘1’ yang diberikan secara serentak terhadap semua lilitan stator Motor.
Untuk motor DC Stepper 4 fasa pada prinsipnya ada dua macam cara, yaitu full step
Seperti terlihat pada table berikut ini :
Step ke Full Step Half Step
1 1 0 0 0 1 0 0 0
2 0 1 0 0 1 1 0 0
3 0 0 1 0 0 1 1 0
4 0 0 0 1 0 1 1 0
5 Berulang ke step 1 0 0 1 0
6 0 0 0 1
7 0 0 0 1
8 1 0 0 1
Tabel 3.1.3 Full Step dan Half Step
Pada Full Step, suatu titik pada sebuah kutub magnet dirotor akan kembali
mendapat tarikan medan magnet stator pada lilitan yang sama setelah step ke 4.
Berikutnya dapat diberikan lagi mulai dari step 1. Untuk Half Step, setiap kutup
magnet pada rotor akan kembali mendapatkan tarikan dari medan magnet lilitan yang
sama setelah Step ke 8. Berikutnya kembali mulai step 1.
Dengan memberikan logika secara bergantian dan berurutan pada pin-pin input
rangkaian jembatan H, maka pergerakan motor stepper dapat diatur.
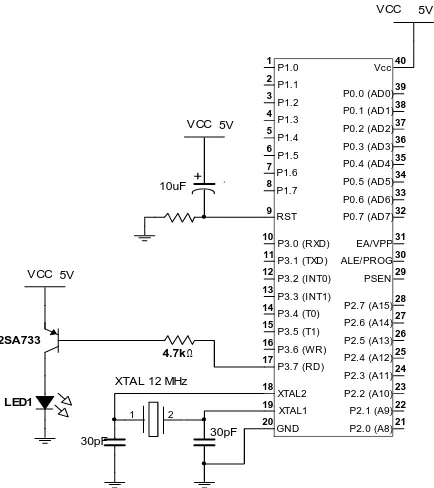
3.1.4 Rangkaian Mikrokontroler AT89S51
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang ada.
Kompoen utama dari rangkaian ini adalah IC mikrokontroler AT89S51. Pada IC
inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan
Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
Gambar 3.1.4 Rangkaian mikrokontroller AT89S51
Pin 31 External Access Enable (EA) diset high (H). Ini dilakukan karena
mikrokontroller AT89S52 tidak menggunakan memori eskternal. Pin 18 dan 19
dihubungkan ke XTAL 12 MHz dan capasitor 30 pF. XTAL ini akan mempengaruhi
kecepatan mikrokontroller AT89S52 dalam mengeksekusi setiap perintah dalam
program. Pin 9 merupakan masukan reset (aktif tinggi). Pulsa transisi dari rendah ke
tinggi akan me-reset mikrokontroller ini. Pin 32 sampai 39 adalah Port 0 yang
merupakan saluran/bus I/O 8 bit open kolektor dapat juga digunakan sebagai
multipleks bus alamat rendah dan bus data selama adanya akses ke memori program
eksternal. Pin 1 sampai 8 adalah port 1. Pin 21 sampai 28 adalah port 2. Dan Pin 10
sampai 17 adalah port 3.
Pin 17 yang merupakan P3.7 dihubungkan dengan transistor dan sebuah
LED. Ini dilakukan hanya untuk menguji apakan rangkaian minimum
mikrokontroller AT89S52 sudah bekerja atau belum. Dengan memberikan program
sederhana pada mikrokontroller tersebut, dapat diketahui apakah rangkaian minimum
tersebut sudah bekerja dengan baik atau tidak. Jika LED yang terhubug ke Pin 17
sudah bekerja sesuai dengan perintah yang diberikan, maka rangkaian minimum
Vreg
tersebut telah siap digunakan. Pin 20 merupakan ground dihubungkan dengan ground
pada power supplay. Pin 40 merupakan sumber tegangan positif dihubungkan
dengan + 5 volt dari power supplay
3.1.5 Rangkaian Catu Daya (PSA)
Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt,
keluaran 5 volt digunakan untuk menghidupkan seluruh rangkaian, sedangkan
keluaran 12 volt digunakan untuk menghidupkan motor stepper. Rangkaian tampak
seperti gambar di bawah ini :
Gambar 3.1.5 Rangkaian Power Supplay (PSA)
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan
tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan
disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan
diratakan oleh kapasitor 2200 μF. Regulator tegangan 5 volt (LM7805CT) digunakan
agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan
masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP
TIP 32 disini berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada
rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika
rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari
3.1.6 Rangkaian AND Gate
Rangkaian ini digunakan untuk menghemat penggunaan pin pada
mikrokontroler dan mempermudah pemrograman. Berikut ini adalah gambar
rangkaian yang digunakan pada alat ini:
Gambar 3.1.6 Rangkaian AND Gate
Ketika semua input dari gerbang AND tersebut bernilai 1 (sensor dalam
keadaan tidak terganggu), maka output dari rangkaian ini akan juga bernilai 1 (sesuai
dengan sifat gerbang AND). Output rangkaian ini nantinya dihubungkan dengan pin
mikrokontroler dan sebuah rangkaian indikator yang tersusun dari sebuah transistor,
resistor dan led. Ketika output dari rangkaian AND Gate ini bernilai 1, maka led
akan menyala.
Namun, ketika terdapat gangguan pada salah satu sensor, maka input salah satu
gerbang AND tersebut akan mendapatkan logika 0. Ini akan menyebabkan logika
yang dikirimkan pada mikrokontroler adalah 0. Keadaan ini akan menyebabkan led
Dengan demikian, mikrokontroler hanya perlu memeriksa 1 pin untuk
mengetahui ada tidaknya gangguan pada 12 sensor yang dihubungkan padanya.
3.1.7 Rangkaian Alarm
Gambar 3.1.7 Rangkaian Alarm
Pada alat ini, alarm yang digunakan adalah buzzer 12 volt. Buzzer ini akan
berbunyi jika positipnya dihubungkan ke sumber tegangan positip dan negatipnya
negatipnya dihubungkan ke ground.
Pada rangkaian di atas transistor berfungsi sebagai saklar elektronik yang dapat
menghidupkan dan mematikan buzzer. Dari gambar dapat dilihat bahwa negatip
buzzer dihubungkan ke kolektor dari transistor NPN, ini berarti jika transistor dalam
keadaan aktip maka kolektor akan terhubung ke emitor dimana emitor langsung
terhubung ke ground yang menyebabkan tegangan
di kolektor menjadi 0 volt, keadaan ini akan mengakibatkan buzzer berbunyi.
Sebaliknya jika transistor tidak aktip, maka kolektor tidak terhubung ke
emitor,sehingga tegangan pada kolektor menjadi 5 volt, keadaan ini menyebabkan
buzzer mati.
Transistor yang digunakan dalam rangkaian di atas adalah transistor jenis
NPN, transistor jenis ini akan aktip apabila tegangan pada basis lebih besar dari 0,7
volt. Resistor 4,7 Kohm pada basis berguna untuk membatasi arus yang masuk pada
Program diawali dengan memeriksa keadaan pada tombol auto. Ketika
tombol auto bernilai 1, maka benda dapat dinaikkan atau diturunkan secara manual
dengan cara menekan tombol untuk naik atau pun turun. Namun, ketika tombol auto
bernilai 0, maka alat akan bekerja berdasarkan logika yang diperoleh dari sensor.
Dengan demikian, untuk menentukan fungsi automatis atau manual dari alat, tombol
auto perlu di set terlebih dahulu sebelum alat dinyalakan.
Ketika alat berjalan dalam mode auto, maka alat akan bekerja berdasarkan logika
yang diterimanya dari sensor. Ketika sensor bernilai 1 (tidak ada yang mengganggu
sensor), maka alat tidak akan melakukan respon apa-apa. Dengan kata lain, alat
menunggu adanya gangguan pada sensor. Ketika sensor bernilai 0 (sensor dalam
keadaan terganggu), mikrokontroler akan segera menyalakan alarm, kemudian
menurunkan alat. Setelah itu, alat akan menunggu adanya sinyal dari remote
inframerah. Ketika pin dari remote inframerah tersebut bernilai 0, selanjutnya alat
akan menunggu adanya penekanan pada tombol naik manual untuk mematikan alarm
dan menaikkan alat kembali.
3.2.2 Program Sistem Pengamanan Ruangan
$regfile = "reg51.dat"
Stepper1 Alias P0.0
Stepper2 Alias P0.1
Stepper3 Alias P0.2
Stepper4 Alias P0.3
Buzzer Alias P0.4
Limit_atas Alias P3.0
Limit_bawah Alias P3.1
Sensor_ir Alias P1.0
Dari_remote Alias P1.1
Tact_turun Alias P1.6
Auto Alias P1.7
Reset Buzzer
Do
If Auto = 0 Then
Gosub Auto
End If
Gosub Manual
Loop
Auto:
If Sensor_ir = 0 Then
Set Buzzer
Gosub Turun
Do
Loop Until Dari_remote = 0
Do
Loop Until Tact_angkat = 0
Reset Buzzer
Gosub Angkat
End If
Return
Manual:
If Tact_angkat = 0 Then
Gosub Angkat
End If
If Tact_turun = 0 Then
End If
Loop Until Limit_atas = 0
Return
If Limit_bawah = 0 Then
Loop Until Limit_atas = 0
BAB 4
PENGUJIAN RANGKAIAN DAN PEMBAHASAN SISTEM
4.1 Pengujian Rangkaian
4.1.1 Pengujian Rangkaian Mikrokontroler
Untuk mengetahui rangkaian mikrokontroler ini sudah bekerja dengan baik,
maka dilakukan pengujian. Pengujian ini dilakukan dengan cara memberikan
program sederhana pada mikrokontroler AT89S52. Programnya adalah sebagai
berikut:
loop:
setb p2.7
acall tunda
clr p2.7
acall tunda
sjmp loop
tunda:
mov r7,#0ffh
tnd:
mov r6,#0ffh
djnz r6,$
djnz r7,tnd
ret
Program ini ditujukan untuk menghidupkan LED yang terhubung pada p2.7,
dan kemudian mematikannya kembali selama selang waktu tertentu secara terus
menyebabkan transistor akan aktif. Aktifnya transistor akan memicu hidupnya LED.
Perintah acall tunda akan menyebabkan LED tersebut akan menyala selama selang
waktu tertentu. Setelah itu, dengan perintah clr p2.7, p2.7 akan berlogika low. Hal ini
menyebabkan LED mati. LED akan mati selama beberapa saat karena adanya
pemanggilan waktu tunda kembali yang ditandai dengan perintah acall tunda.
Keadaan ini akan berulang – ulang, sehingga LED akan terlihat kelap – kelip.
Jika program tersebut diisikan, kemudian nyala LED terlihat kelap kelip
maka rangkaian tersebut telah bekerja dengan baik.
4.1.2 Pengujian Rangkaian Sensor Inframerah
Rangkaian sensor inframerah dikatakan bekerja dengan baik ketika
photodioda mendapat pantulan sinar inframerah, LED indikator pada rangkaian
inframerah akan menyala. Dan ketika tegangannya diukur akan menunjukkan 0V.
Sebaliknya, ketika photodioda tidak mendapat pantulan sinar inframerah, LED
indikator pada rangkaian inframerah tidak menyala. Dan ketika diukur, tegangan
keluarannya akan bernilai 5V. Trimpot digunakan untuk mengatur sensitivitas dari
sensor inframerah ini.
4.1.3 Pengujian Rangkaian Driver Motor Stepper
Rangkaian driver motor stepper dapat diuji dengan menggunakan perangkat
lunak (software) yaitu bahasa assembly. Pengujian dengan prosedur pada program
dilakukan untuk mengetahui apakah rangkaian driver motor stepper ini dapat
beroperasi sesuai dengan data/perintah yang ditentukan.
;---
;Rutin angkat benda
;---
Angkat:
Clr Stepper1
Clr Stepper2
Clr Stepper3
Setb Stepper4
acall tunda
Clr Stepper1
Clr Stepper2
Setb Stepper3
Clr Stepper4
acall tunda
Clr Stepper1
Setb Stepper2
Clr Stepper3
Clr Stepper4
acall tunda
Setb Stepper1
Clr Stepper2
Clr Stepper3
Clr Stepper4
acall tunda
Program diatas digunakan untuk menggerakkan motor stepper untuk
mengangkat benda ke atas.
4.1.4 Pengujian Rangkaian Catu Daya (PSA)
Rangkaian ini dikatakan baik apabila ketika rangkaian dinyalakan, LED
indikator akan menyala. Kemudian, ketika tegangan keluaran diukur akan
menunjukkan 5V dan 12V.
4.1.5 Pengujian Rangkaian AND Gate
Rangkaian ini diuji dengan cara memberikan logika 1 pada ke-12 inputnya, maka led
indikator akan menyala. Kemudian, salah satu inputnya diberikan logika 0, maka
hasil yang di dapatkan adalah led indikator tidak menyala. Ketika kedua hasil ini
sudah diperoleh, maka dapat disimpulkan bahwa rangkaian yang dibuat sudah dalam
keadaan baik.
4.4.5 Pengujian Rangkain Alarm
Rangkaian ini diuji dengan cara memberikan logika 0 dan 1 secara bergantian
pada salurannya inputnya. Ketika diberi logika 1, buzzer akan berbunyi. Ketika
diberi logika 0, buzzer tidak berbunyi. Jika rangkaian memberi respon demikian,
4.2 Analisa
Setelah keseluruhan dibuat dan diuji,maka berikut ini adalah rangkaian kerja
dari simulasi pengaman ruangan terhadap barang berharga dengan menggunkan
CCTV yang menjadi proyek Tugas akhir penulis :
1. Pada saat Power Supply dihubungkan ke sumber tegangan maka sensor yang
diletakan di etalase sebagai tempat barang berharga akan bekerja.
2. Ketika sensor terganggu maka sensor akan mengirim data ke mikrokontroler
dan memerintahkan motor untuk berputar sehingga etalase akan turun dan
buzzer pun berbunyi.
3. Untuk menaikan kembali etalase digunakan remot control infra merah
4. CCTV pada system ini hanya sebagai pemantau seluruh kegiatan yang terjadi