EVALUASI JARAK PANDANG PADA ALINEMEN
VERTIKAL DAN HORIZONTAL PADA TIKUNGAN JALAN
LUAR KOTA
(STUDI KASUS SEI RAMPAH-TEBING TINGGI)
TUGAS AKHIR
Diajukan untuk melengkapi tugas-tugas dan memenuhi syarat untuk menempuh
Ujian Sarjana Teknik Sipil
Oleh:
050404134
PIETER L. HUTAGALUNG
BIDANG STUDI TRANSPORTASI
DEPARTEMEN TEKNIK SIPIL
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
Ruas Sei Rampah-Tebing Tinggi merupakan sistem jaringan jalan yang penting, yang menghubungkan suatu kabupaten dengan kabupaten lainnya. Untuk itu perencanaan geometrik yang baik meliputi jarak pandang yang aman bagi pengemudi agar dapat dengan aman dan cepat melakukan perjalanan sangat diperlukan guna menghemat biaya operasional kendaraan, waktu perjalanan, dan mengurangi tingkat kecelakaan pada jalan luar kota. Tujuan penelitian ini adalah untuk mengetahui kelayakan jarak padang pada ruas tersebut untuk dijadikan dasar menentukan kelayakan geometrik jalan luar kota. Pemilihan lokasi penelitian dilakukan pada daerah yang rawan kecelakaan dengan menggunakan theodolite sebagai alat bantu untuk pemetaan kondisi lapangan.
Hasil penelitian menunjukkan bahwa Alinemen vertikal pada seluruh lokasi yang ditinjau di Desa Firdaus Km 56 Kecamatan Sei Rampah dan Kecamatan Sei Bamban Km 71 tidak memenuhi syarat perencanaan geometrik sedangkan pada Alinemen Horizontal untuk lokasi Desa Pon Km 65 Kecamatan Sei Rampah dan Kecamatan Sei Bamban Km 71 pada tikungan pertama memenuhi syarat perencanaan geometrik. Untuk tikungan kedua pada Kecamatan Sei Bamban Km 71 tidak memenuhi syarat perencanaan.
KATA PENGANTAR
Rasa syukur yang tiada hingga kepada Tuhan Yang Maha Esa yang selalu memberikan rahmat dan hidayahNya hingga penulis dapat menyelesaikan Tugas Akhir ini..
Adapun judul dari Tugas Akhir ini adalah “Evaluasi Jarak Pandang
Pada Alinemen Vertikal dan Horizontal Pada Tikungan Pada Jalan Luar
Kota. Tugas Akhir ini disusun sebagai salah satu syarat untuk menyelesaikan
pendidikan Strata I (S1) di Departemen Teknik Sipil Fakultas Teknik Universitas Sumatera Utara.
Penulis menyadari bahwa dalam penulisan tugas akhir ini tidak terlepas dari bimbingan, dukungan dan bantuan dari semua pihak. Penulis mengucapkan terima kasih atas segala bantuan, motivasi dan doa yang diberikan hingga penulis dapat menyelesaikan studi di Departemen Teknik Sipil Fakultas Teknik Universitas Sumatera Utara, terutama kepada :
1. Bapak Ir. Joni Harianto , selaku Dosen Pembimbing yang telah berkenan meluangkan waktu, tenaga dan pemikiran untuk membantu, membimbing dan mengarahkan penulis hingga selesainya tugas akhir ini.
2. Bapak Prof. Dr. Ing. Johannes Tarigan, selaku Ketua Departemen Teknik Sipil Fakultas Teknik Universitas Sumatera Utara.
4. Bapak Ir. Indra Jaya Pandia, Bapak Irwan S. Sembiring, S.T., M.T., Bapak Yusandi Aswad, S.T., M.T., selaku Dosen Pembanding/Penguji yang telah memberikan masukan dan kritikan yang membangun dalam menyelesaikan tugas akhir ini.
5. Bapak Ir. Zulkarnain A. Muis, M.Eng.Sc. selaku Koordinator Sub Jurusan Transportasi Teknik Sipil Universitas Sumatera Utara yang telah memberikan masukan kepada penulis hingga selesainya tugas akhir ini.
6. Bapak/Ibu Staf Pengajar Departemen Teknik Sipil Universitas Sumatera Utara yang telah membekali penulis dengan berbagai ilmu pengetahuan hingga selesainya tugas akhir ini.
7. Bapak/Ibu Staf Tata Usaha Departemen Teknik Sipil Fakultas Teknik Universitas Sumatera Utara yang telah membantu dalam menyelesaikan dan menyukseskan tugas akhir ini.
8. Ayahanda, Ir. Boas Hutagalung, M.Sc dan Ibunda (Almh) dr. Katharina Sihombing, M.Kes tercinta yang selalu mendukung dan memotivasi penulis dalam menjalani hidup dengan penuh kasih sayang. Merupakan suatu kebahagian bila ananda bisa selalu membahagiakan ibu dan ayah tercinta.
9. Abanganda Immanuel B. Hutagalung S.T. dan Adinda Stefani Hutagalung yang telah mendukung dan memberikan semangat. 10.Teman-teman seperjuangan angkatan ’05, abang-abang angkatan
langsung dalam penyelesaian tugas akhir ini, sehingga tugas akhir ini dapat selesai dengan baik dan tanpa menemui hambatan serta rintangan yang berarti.
11.My Castle Corp, Rudolf, Niel, N’gok, Murra, Marthin, Marshall, Juju dan yang tak tersebutkan namanya.
Tiada gading yang tak retak, demikian juga dengan Tugas Akhir ini yang masih jauh dari kesempurnaan. Maka dari itu, segala saran, masukan dan kritikan yang sifatnya membangun akan penulis terima dengan tangan terbuka demi perbaikan tugas akhir ini. Harapan penulis, semoga tugas akhir ini dapat memberikan manfaat bagi kita semua.
Medan, Juli 2010
Hormat Saya,
Penulis
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... v
DAFTAR GAMBAR ... ix
DAFTAR TABEL ... xi
DAFTAR NOTASI ... xii
BAB I PENDAHULUAN ... 1
I.1. Uraian Umum ... 1
I.2. Latar Belakang ... 2
I.3 Perumusan Masalah Penelitian... 3
I.4.Pembatasan Masalah... 4
I.5. Tujuan Penelitian ... 4
I.6. Manfaat Penelitian ... 5
I.7. Metodologi Pembahasan ... 5
I.9. Sistematika Pembahasan ... 5
BAB II DASAR TEORI... 9
II.1. Jarak Pandang Henti ... 9
II.1.1 Jarak Tanggap ……….. 10
II.1.2 Jarak Mengerem ... 12
II.1.3 Pengaruh Landai Jalan Terhadap Jarak Pandang Henti Minimum ... 16
II.1.3.1 Pertimbangan-pertimbangan Penentuan Besarnya Jarak Mengerem Pada Jalan yang Berlandai ... 17
II.1.4 Jarak Pandangan Henti Berdasar Kendaraan Truk .. . 18
II.2 Jarak Pandang Menyiap ... 19
II.2.1 Pengaruh Kelandaian Terhadap Jarak Pandang Menyiap ………. 24
II.2.2 Frekwensi Pengadaan Jarak Pandang Menyiap ……... 25
II.3 Jarak Kebebasan Pandang Pada Lengkung Horizontal ... 26
II.3.2 Jarak Kebebasan Pandang Lebih Besar Dari Lengkung Horizontal (Jh > L) ……….. 27
II.4. Jarak Kebebasan Pandang Pada Alinemen Vertikal ... 31
II.4.1. Jarak Kebebasan Pandang Pada Lengkung
Vertikal cembung ... 32
II.4.1.1.Jarak Kebebasan Pandangan Seluruhnya
Dalam Daerah Lengkung (S<L) ... 32
II.4.1.2 Jarak Kebebasan Pandangan Seluruhnya
Diluar Daerah Lengkung (S<L) ... ... 34
II.4.2 Jarak Pandangan Pada Lengkung Vertikal cekung .. 36
II.4.2.1Jarak Penyinaran Lampu Kendaraan ... 37
II.4.2.1.1 Lengkung Vertikal Cekung Dengan Jarak
Penyinaran lampu Depan < L... 37
II.4.2.1.2 Lengkung Vertikal Cekung Dengan Jarak
Jarak Penyinaran Lampu depan > L ... 38
II.4.2.2 Jarak Pandangan Bebas Dibawah
II.4.2.2.1. Jarak Pandangan Bebas Dibawah
Bangunan Pada Lengkung Vertikal
Cekung Dengan S<L ... 40
II.4.2.2.2. Jarak Pandangan Bebas Dibawah
Bangunan Pada Lengkung Vertikal
Cekung Dengan S>L ... 41
II.4.2.2.3. Bentuk Visual Lengkung Vertikal Cekung ... 42
II.4.2.2.4. Kenyamanan Mengemudi Pada Lengkung
Vertikal Cekung ... 42
II.4.3 Perhitungan Elevasi Kelengkungan Pada Lengkung
Vertikal... 43
II.4.3.1. Perhitungan Elevasi Pada Lengkung Vertikal
Cembung dan Cekung ... 43
II.5.Tipe-Tipe Kecelakaan pada Jalan Raya ……… 45
BAB III INFORMASI LOKASI STUDI DAN
METODOLOGI... 47
III.2. Identifikasi Daerah Penelitian ... 49
III.3. Pengumpulan Data ... 49
III.4. Pengolahan Data ... 50
BAB IV ANALISA DATA ... 49
IV.1. Perencanaan Pada Alinemen Hortizontal ... 54
IV.1.1 Analisa Tikungan Km 65 Desa Pon ... 54
IV.1.2. Analisa Tikungan Di Km 71 Desa Sei Bamban ... 56
IV.2. Perencanaan Pada Alinemen Vertikal ... 58
IV.2.1. Analisa Lengkung Vertikal I Pada Km 56 Desa Firdaus ... 59
IV.2.2. Analisa Lengkung Vertikal II Pada Km 56 Desa Firdaus ... 62
IV.2.3. Analisa Lengkung Vertikal I Pada Km 56 Desa Sei Bamban ... 65
BAB V KESIMPULAN DAN SARAN ... 71
V.2. Saran ... 73
DAFTAR PUSTAKA
DAFTAR GAMBAR
Gambar 1.1 Bagan Penelitian ……… 8
Gambar 2.1. Grafik Koefisien Gesekan Memanjang Jalan ... 14
Gambar 2.2. Proses Gerakan Menyiap Pada Jalan dua lajur dua arah ... 21
Gambar 2.3. Grafik Korelasi Antara t1 dan t2 ... 24
Gambar 2.4. Jarak Pandang Pada Lengkung Horizontal ... 26
Gambar 2.5. Grafik Jarak Pengahalang (m) dari lajur
sebelah dalam ... 28
Gambar 2.6. Jarak Kebebasan Pandang Pada Lengkung Vertikal
Cembung (S<L) ... 32
Gambar 2.7. Jarak Pandangan Pada Lengkung Vertikal
Cembung (S>L) ... 34
Gambar 2.8. Jarak Pandangan Pada Lengkung Vertikal
Cekung (S<L) ... 37
Gambar 2.9. Jarak Pandangan Pada Lengkung
Vertikal Cekung (S>L) ...38
Pada Lengkung Vertikal Cekung (S<L) ... 40
Gambar 2..11. Jarak Pandangan Bebas Dibawah Bangunan Pada Lengkung Vertikal Cekung (S>L) ... 41
Gambar 2.12. Segmen Untuk Lengkung Vertikal Cembung ... 44
Gambar 2.13. Segmen Untuk Lengkung Vertikal Cekung ...40
Gambar 3.1 Lokasi Kasus ... 49
Gambar 3.2 Bagan Pengolahan Data... 53
Gambar 4.1. Alinemen Horizontal di Tikungan Km 65 ... 55
Gambar 4.2. Alinemen Horizontal di Tikungan Km 71 ... 58
Gambar 4.3 Alinemen Vertikal I Km 56 ... 68
Gambar 4.4 Alinemen Vertikal II Km 56 ... 69
Gambar 4.5 Alinemen Vertikal Km 71 ... 70
DAFTAR TABEL
Tabel 2.1. Jarak Pandang Henti Dengan Hitungan perlambatan ... 15
Tabel 2.2. Jarak Pandang Henti Minimum ... 15
Tabel 2.3. Nilai E untuk Jh<Lt ... 29
Tabel 2.4 Nilai E untuk Jh ≥ Lt... 30
Tabel 2.5. Nilai E untuk Jh-Lt ... 31
Tabel 2.6. Panjang Minimum Lengkung Vertikal ... 34
Tabel 2.7. Nilai Lv Berdasar AASHTO 2001 ... 33
Tabel 2.8. Perbedaan h1 dan h2 antara AASTHO dan Bina Marga ... 39
Tabel 3.1 Klasifikasi Menurut Kelas Jalan ………..………... 48
DAFTAR NOTASI
Jh min = Jarak pandang henti minimum (meter)
fm = koefisien gesekan antara ban dengan permukaan aspal
V = Kecepatan Kendaraan (Km/Jam)
G = Berat kendaraan (Ton)
a = perlambatan kendaraan (deaccelerate), (m/s2)
L = besarnya kelandaian dalam desimal
E = Jarak dari penghalang ke sumbu lajur sebelah dalam (meter) Ǿ = Setengah sudut pusat lengkung sepanjang Lt
Lt = Panjang Busur Lingkaran (meter) R = Jari-jari tikungan (meter)
S = Jarak Pandangan (meter)
C = Konstanta garis pandangan
A = Perbedaan kelandaian (dalam persen)
h1 = Tinggi mata pengemudi (meter)
h2 = Tinggi objek (meter)
ABSTRAK
Ruas Sei Rampah-Tebing Tinggi merupakan sistem jaringan jalan yang penting, yang menghubungkan suatu kabupaten dengan kabupaten lainnya. Untuk itu perencanaan geometrik yang baik meliputi jarak pandang yang aman bagi pengemudi agar dapat dengan aman dan cepat melakukan perjalanan sangat diperlukan guna menghemat biaya operasional kendaraan, waktu perjalanan, dan mengurangi tingkat kecelakaan pada jalan luar kota. Tujuan penelitian ini adalah untuk mengetahui kelayakan jarak padang pada ruas tersebut untuk dijadikan dasar menentukan kelayakan geometrik jalan luar kota. Pemilihan lokasi penelitian dilakukan pada daerah yang rawan kecelakaan dengan menggunakan theodolite sebagai alat bantu untuk pemetaan kondisi lapangan.
Hasil penelitian menunjukkan bahwa Alinemen vertikal pada seluruh lokasi yang ditinjau di Desa Firdaus Km 56 Kecamatan Sei Rampah dan Kecamatan Sei Bamban Km 71 tidak memenuhi syarat perencanaan geometrik sedangkan pada Alinemen Horizontal untuk lokasi Desa Pon Km 65 Kecamatan Sei Rampah dan Kecamatan Sei Bamban Km 71 pada tikungan pertama memenuhi syarat perencanaan geometrik. Untuk tikungan kedua pada Kecamatan Sei Bamban Km 71 tidak memenuhi syarat perencanaan.
BAB I
PENDAHULUAN
I.1 Umum
Jalan dibangun dengan salah satu mayoritas fungsi yaitu membuat orang dan barang dapat berpindah dari suatu tempat ke tempat lain. Fungsi tersebut harus didukung dengan kondisi jalan yang terencana dengan baik dan tepat. Dewasa ini peranan transportasi merupakan salah satu unsur yang sangat menentukan perkembangan ekonomi suatu negara, khususnya suatu daerah.
Kemajuan dalam bidang transportasi menyebabkan jarak antara satu daerah dengan daerah lainnya dirasakan menjadi lebih dekat. Selain itu arus barang dari suatu tempat ke tempat lainnya menjadi lebih lancar dan dapat menyebar lebih luas sehingga menunjang pemerataan ekonomi dan pertumbuhan ekonomi suatu daerah.
Jalan adalah salah satu prasarana transportasi darat yang meliputi segala bagian jalan, termasuk bangunan pelengkap dan perlengkapannya dan diperuntukkan bagi lalu lintas, yang berada pada permukaan tanah, diatas permukaan tanah, dibawah permukaan tanah, dan/atau air, kecuali jalan kereta api, jalan lori, dan jalan kabel (Undang-Undang No. 38, 2004).
rencana (VR) adalah kecepatan yang dipilih sebagai dasar perencanaan geometrik yang memungkinkan kendaraan-kendaraan bergerak dengan aman dan nyaman dengan kondisi cuaca yang cerah, lalu lintas yang lengang dan pengaruh samping jalan yang tidak berarti. (Sukirman S, 1994)
Untuk mendapatkan standar kecepatan rencana, diperlukan kondisi jalan yang baik, bebas, dan pandangan yang tidak terhalang baik oleh alinemen jalan yang berbukit maupun hambatan samping yang menggangu. Untuk itu perencanaan dan ketersediaan jarak pandang perlu diperhatikan agar pengemudi dapat berkendara dengan aman dan tidak terhalang.
Ketersediaan jarak pandang ini meliputi ketersediaan jarak pandang pada alinemen vertikal dan ketersediaan pada alinemen horizontal.
I.2 Latar Belakang
Jalan luar kota merupakan sistem dari jaringan jalan yang didesain dengan kecepatan rencana yang tinggi dan memiliki perencanaan geometrik yang baik sehingga pengguna jalan dapat dengan cepat dan nyaman sampai ke daerah tujuan.
Kondisi jalan luar kota yang baik dapat memicu pertumbuhan suatu wilayah karena dipengaruhi oleh aksesibilitas transportasi yang tinggi.
tinggi maka daerah tersebut menjadi daerah “blackspot”. Blackspot adalah lokasi pada jaringan jalan dimana frekwensi kecelakaan atau jumlah kecelakaan lalu lintas dengan korban mati atau kriteria kecelakaan pertahunnya lebih besar dari jumlah minimal yang ditentukan. (Sukirman, 1994)
Kondisi dengan aksesibilitas yang tinggi dan rawan kecelakaan tersebut sangat dipengaruhi oleh ketersediaan jarak pandang baik jarak pandang untuk mendahului maupun jarak pandang untuk berhenti. Untuk itu perencanaan geometrik yang baik meliputi jarak pandang aman bagi pengemudi agar dapat dengan aman dan cepat melakukan perjalanan sangat diperlukan sehingga menghemat biaya operasi kendaraan, waktu perjalanan, dan mengurangi tingkat kecelakaan pada jalan luar kota.
Untuk menganalisa kelayakan jarak pandang, data yang diperlukan antara lain adalah data kondisi daerah tikungan dan data-data lain yang mendukung.
Pentingnya perhitungan jarak pandang yang memadai adalah sebagai koreksi rencana geometrik, rencana daerah pemanfaatan jalan yang meninjau halangan yang menghalangi penglihatan pada saat mendahului, pada saat pengereman dan memasuki tikungan.
Untuk itu penulis coba mengkaji dan mengevaluasi ketersediaan jarak pandang yang ada pada daerah tersebut apakah memenuhi kriteria yang telah ditetapkan atau tidak.
I.3 Perumusan Masalah Penelitian
pada saat melewati lengkung vertikal jalan luar kota Sei Rampah-Tebing Tinggi. Ruas jalan yang diambil adalah pada area “black spot” atau daerah rawan kecelakaan. Pada studi kasus ini diambil pada Km 70-71 Kecamatan Sei Bamban, Km 65 Desa Pon, dan Km 56 Desa Firdaus Kabupaten Serdang Bedagai karena dari data yang diperoleh pada tahun 2009 jumlah kecelakaan yang terjadi cukup tinggi.
I.4 Pembatasan Masalah
Untuk pembatasan masalah pada tugas akhir ini adalah:
• Alinemen Horizontal
Untuk alinemen horizontal, masalah yang ditinjau adalah ketersediaan jarak pandang pada tikungan di Km 65 Desa Pon dan Km 71 Desa Sei Bamban.
• Alinemen Vertikal
Untuk alinemen vertikal, masalah yang ditinjau adalah ketersediaan jarak pandang pada lengkung vertikal di Km 56 Desa Firdaus dan Km 71 Desa Sei Bamban.
I.5 Tujuan Penelitian
Adapun tujuan dari penulisan tugas akhir ini adalah:
Untuk mengetahui kelayakan jarak pandang yang ada pada jalan
menentukan kelayakan desain geometrik jalan luar kota Sei Rampah-Tebing Tinggi.
Untuk mengetahui kelayakan ruas jalan Sei rampah-Tebing Tinggi
ditinjau dari alinemen vertikal dan horizontal.
I.6 Manfaat Penelitian
Penelitian ini diharapkan dapat bermanfaat untuk menambah ilmu pengetahuan, khususnya tentang perencanaan jarak pandang yang memenuhi yang mengacu pada perencanaan geometrik yang baik.
I.7 Metodologi Pembahasan
Metode pembahasan yang dilakukan pada penulisan tugas akhir ini adalah sebagai berikut :
1. Melakukan identifikasi terhadap hal-hal yang diperlukan untuk menghitung jarak pandang pada alinemen vertikal dan horizontal.
2. Menganalisa tingkat kecelakaan yang terjadi pada daerah kasus sehingga dapat dijadikan acuan masalah.
3. Menganalisa data geometrik yang telah didapat dari survey di lapangan dalam bentuk koordinat dan elevasi sehingga dapat diubah kedalam bentuk gambar.
5. Menarik suatu kesimpulan dari data yang telah diubah kedalam bentuk gambar, apakah sesuai dengan perhitungan yang telah didapat.
I.8 Sumber Data dan Standar Perencanaan
Pada tugas akhir ini data yang diperlukan antara lain :
• Data Primer, yaitu data survey geometrik dan lalu lintas dari
daerah kasus.
• Data Sekunder, yaitu data kecelakaan yang terjadi dalam kurun
waktu beberapa tahun pada daerah kasus.
Standar perencanaan antara lain meliputi kecepatan rencana, lebar jalur, lebar bahu, kelandaian, dan jarak pandang yang ada dilapangan.
I.9 Sistematika Pembahasan
Penulisan Tugas Akhir ini disusun dalam beberapa bab, agar tiap-tiap bab menjelaskan isi atau maksud tulisan tersebut secara lebih spesifik, sesuai sub judul masing-masing.
Bab II, berisikan dasar teori untuk menganalisa data geometrik maupun teori untuk perencanaan, baik itu pada alinemen vertikal maupun pada alinemen horizontal agar didapat jarak pandang yang sesuai pada daerah Kecamatan Sei Bamban Km 71, Desa Pon Km 65, dan Desa Firdaus Km 56.
Bab III, berisi data hasil survey yang telah dilakukan pada lokasi dan teknik pengambilan data.
Bab IV, berisi analisa data yang telah didapat di lokasi dan perhitungannya serta gambar keadaan pada jalan luar kota di Kecamatan Sei Bamban Km 70-71, Desa Pon Km 65, dan Desa Firdaus Km 56.
Gambar 1.1 Bagan Penelitian
MULAI
STUDI PENDAHULUAN
TINJAUAN PUSTAKA Pengumpulan bahan refrensi
& studi literatur
DATA PRIMER
Survey dan data geometrik yang ada
PERHITUNGAN DAN PENGOLAHAN DATA Menggunakan Microsoft Excel dan Autocad
ANALISA DAN DISKUSI Membahas hasil yang diperoleh oleh
penulis dari pengolahan data dan menganalisa apa saja yang menjadi
inti pengolahan
KESIMPULAN DAN SARAN
SELESAI
BAB II
DASAR TEORI
Pada jalan luar kota dengan kecepatan yang rencana yang telah ditentukan harus memiliki jarak pandang yang memadai untuk menghindari terjadinya kecelakaan akibat terhalangnya penglihatan dari pengemudi akibat benda ditepi jalan maupun dari kendaraan lain. Jarak pandang minimum harus terpenuhi untuk mendapatkan hasil geometrik yang baik dan dapat mengurangi tingkat kecelakaan akibat kesalahan desain. Menurut kegunaannya jarak pandang dapat diklasifikasikan menjadi dua yaitu:
1. Jarak Pandang Henti
2. Jarak Pandang Menyiap (Mendahului)
II.1 Jarak Pandang Henti
Jarak pandang pengemudi kendaraan yang bergerak pada lajur tepi sebelah dalam lajur seringkali dihalangi oleh gedung-gedung, pepohonan, spanduk, iklan, tebing galian, struktur bangunan seperti jembatan maupun benda-benda lain. Untuk itu ketersediaan jarak pandang harus dipenuhi disepanjang lengkung horizontal maupun vertikal. Dengan tercapainya syarat tersebut maka terdapat batas minimum antara kendaraan dengan penghalang.
lajur jalannya. Rintangan itu dilihat dari tempat duduk pengemudi dengan tinggi mata pengemudi 120 cm serta tinggi benda 10 cm dan setelah menyadari adanya adanya rintangan, maka pengemudi tersebut mengambil keputusan untuk berhenti ( Direktorat Jenderal Bina Marga, 2005).
Jarak pandang henti terdiri dari dua elemen jarak, yaitu:
1. Jarak tanggap yaitu adalah jarak yang diperlukan suatu kendaraan sejak pengemudi melihat rintangan yang menyebabkan ia harus berhenti sampai saat pengemudi menginjak rem.
2. Jarak mengerem
II.1.1 Jarak Tanggap
Dengan pengertian seperti diatas ketersediaan dari jarak pandang henti minimum sangat diperlukan. Jarak pandangan henti minimum adalah jarak minimum yang ditempuh pengemudi selama menyadari adanya rintangan sampai menginjak rem, ditambah jarak untuk mengerem. Waktu yang dibutuhkan untuk bereaksi mengambil keputusan disebut waktu PIEV (Perception, Identification, Emotion, Volition). Jadi waktu PIEV adalah waktu yang dibutuhkan untuk proses deteksi, pengenalan dan pengambilan keputusan. Waktu ini dipengaruhi dari kondisi dari pengemudi, kebiasaan, cuaca, penerangan juga kondisi dari mental pengemudi. Waktu ini diperkirakan sekitar 1,5 detik. (Mannering, 1990)
sampai 1 detik. Untuk perencanaan diambil waktu 1 detik. Maka waktu yang dibutuhkan sekitar 2,5 detik. (Bina Marga, 2005)
Jarak yang ditempuh selama waktu tersebut adalah d1
(2.1)
d1 = jarak dari saat melihat rintangan sampai menginjak pedal rem (meter)
V = Kecepatan (Km/Jam)
t = Waktu Reaksi = 2,5 detik
maka dengan mengalikan t = 2,5 detik ke persamaan (2.1) didapat persamaan :
(Bina Marga, 2005)
II.1.2 Jarak Mengerem (Braking Distance)
Jarak mengerem adalah jarak yang ditempuh kendaraan dari menginjak pedal rem sampai kendaraan itu berhenti (Bina Marga, 2005). Banyak faktor yang mempengaruhi jarak mengerem ini, antara lain :
• Faktor ban
• Sistem pengereman itu sendiri
• Kondisi muka jalan
• Kondisi perkerasan jalan
Untuk penelitian yang dikembangkan oleh AASHTO pada tahun 2001, secara umum kendaraan mengurangi kecepatannya dengan perlambatan lebih besar dari 4,5 m/s2 atau setara dengan 14,8 ft/s2 ketika melihat rintangan dengan seketika pada jalan raya. Hampir 90 % pengendara mengurangi kecepatan kendaraannya dengan perlambatan 3,4 m/s2 atau sekitar 11,2 ft/s2. Perlambatan ini membuat pengendara untuk tetap di lajur dan dapat mengendalikan stiur selama pengereman di permukaan yang basah. Pada umumnya, hampir semua kondisi jalan mampu menyediakan perlambatan sampai dengan angka yang dimaksud.
Dengan mengeliminasi G didapat :
Jh min = Jarak pandang henti minimum (meter)
fm = koefisien gesekan antara ban dengan permukaan aspal dalam arah memanjang jalan
d2 = jarak pengereman (meter)
V = Kecepatan Kendaraan (Km/Jam), untuk ini dipakai kecepatan rencana jalan.
G = Berat kendaraan (Ton)
(Bina Marga, 2005)
Gambar 2.1 Koefisien Gesekan Memanjang Jalan
sumber : Spesifikasi Standar Untuk Perencanaan Geometrik Jalan Luar Kota, (Bina Marga, 2005)
Untuk perencanaan dengan metode AASHTO tahun 2001 maka jarak pengereman dapat dirumuskan :
V = Kecepatan Rencana (Km/Jam)
Tabel 2.1 Jarak Pandang Henti dengan Perhitungan Perlambatan Sumber : A policy on Geometric Design of Highways And Streets, (AASHTO , 2001)
Untuk tinggi rintangan pada lajur jalan dan tinggi mata pengemudi diukur dari tempat duduk pengemudi mobil penumpang. Berikut ini ketentuan yang telah diberikan oleh Bina Marga dan AASHTO 2001.
Tabel 2.2. Tabel Jarak Pandang Henti Minimum
Kecepatan Rencana (km/jam) 120 100 80 60 50 40 30 20
Jh min 250 175 120 75 55 40 27 16
Perbedaan perhitungan Jarak Pandangan Henti antara AASHTO tahun 2001 dengan Bina Marga 1997 disebabkan karena, AASHTO 2001 menggunakan perlambatan sebesar 0,34 m/s2 sedangkan pada Bina Marga 1997 menggunakan perlambatan sebesar 0,4 m/s2.
II.1.3 Pengaruh Landai Jalan Terhadap Jarak Pandang Henti Minimum
Pada umumnya jalan antar kota dibangun dengan mengikuti contour daerah yang ada tetapi dengan memperhitungkan tingkat keamanan dan kenyamanannya. Oleh sebab itulah medan jalan yang ada merupakan salah satu faktor penting yang harus diperhatikan untuk perencanaan geometrik.
Pada jalan-jalan yang memiliki kemiringan (berlandai), berat kendaraan menjadi salah satu faktor dalam penentuan Jarak Pandang Henti Minimum, karena berat sejajar permukaan memberikan pengaruh yang cukup signifikan dalam penentuan jarak mengerem. Pada jalan menurun, jarak mengerem akan bertambah panjang karena kecenderungan kendaraan untuk turun yang disebabkan oleh gaya tarik gravitasi. Sedangkan pada jalan mendaki, jarak mengerem akan bertambah pendek akibat bantuan dari gaya gravitasi untuk memperlambat laju kendaraan.
Dengan demikian rumus dari jarak pandangan henti minimum pada jalan berlandai :
Jh min = jarak pandang henti minimum (m)
V = Kecepatan rencana (Km/Jam)
fm = koefisien gesekan memanjang jalan
t = waktu reaksi (2,5 detik)
L = besarnya kelandaian dalam desimal
(+) = apabila jalan mendaki
(-) = apabila jalan menurun
AASHTO 2001 juga memberikan rumusan untuk penentuan jarak pandangan henti minimum pada jalan berlandai, yaitu :
dimana :
a = perlambatan (m/s2)
G = landai jalan dibagi dengan 100
II.1.3.1 Pertimbangan-pertimbangan penentuan besarnya jarak mengerem
pada jalan yang berlandai
Ada beberapa hal yang perlu diperhatikan dalam penentuan besarnya jarak mengerem, yaitu:
Untuk jalan dengan landai yang menurun (-L) jarak mengerem yang dibutuhkan lebih besar dari jalan dengan landai mendaki. Tetapi karena dipakai untuk 2 arah tak terpisah maka sebaiknya diambil jarak mengerem = jarak mengerem pada jalan datar.
2. Untuk jalan 1 arah
Jarak mengerem harus benar-benar dipertimbangkan agar sesuai dengan landai yang ada.
II.1.4 Jarak Pandangan Henti Berdasar Kendaraan truk
Penentuan Jarak pandang pada umumnya berdasarkan kendaraan penumpang. Untuk kendaraan yang lebih tinggi seperti halnya truk memerlukan beberapa ketentuan. Pada kenyataannya truk memiliki ukuran lebih besar, lebih tinggi, berkecepatan lebih rendah, dan memiliki kemampuan pengereman yang berbeda dengan mobil penumpang. Atas dasar inilah truk membutuhkan jarak pandangan henti yang lebih besar.
Tetapi secara umum jarak pandangan henti minimum untuk truk dapat diambil sama dengan jarak pandangan henti minimum untuk mobil penumpang, karena :
1. Tinggi mata pengemudi truk lebih tinggi daripada tinggi mata pengemudi mobil penumpang, karena tempat duduk yang lebih tinggi, maka biasanya diambil 180 cm diukur dari permukaan perkerasan.
Tetapi adakalanya beberapa keadaan-keadaan yang tidak dapat diabaikan bila terjadi pada kondisi penurunan yang sangat panjang, karena :
1. Tinggi mata pengemudi truk yang lebih tinggi tidak berarti lagi. 2. Kecepatan truk hampir sama dengan kecepatan mobil penumpang.
Dalam kondisi seperti ini maka jarak pandangan henti minimum sebaiknya diambil lebih panjang daripada keadaan normal. Hal ini bertujuan untuk memberikan jarak yang aman untuk pengereman.
II.2 Jarak Pandang Menyiap (Mendahului)
Pada lokasi kasus memiliki keadaan dengan dua lajur dan dua arah yang relatif sempit. Untuk itu, perencanaan jarak pandang menyiap yang baik untuk lokasi sangat diperlukan.
Jarak pandang menyiap standar dihitung berdasarkan atas panjang jalan yang diperlukan untuk dapat melakukan gerakan menyiap suatu kendaraan dengan sempurna. Perencanaan untuk jarak pandang menyiap ini disituasikan bukan untuk banyak kendaraan yang melewati atau dilewati, tetapi disituasikan dengan hanya satu kendaraan yang melewati kendaraan lainnya.
Jarak pandangan menyiap standar pada jalan dua lajur dua arah dihitung berdasarkan beberapa asumsi terhadap sifat arus lalu lintas dan kondisi pengemudi yaitu :
1. Kendaraan yang akan disiap (didahului) harus mempunyai kecepatan yang tetap.
2. Sebelum melakukan gerakan menyiap, kendaraan harus mengurangi kecepatannya dan mengikuti kendraan yang akan disiap dengan kecepatan yang sama.
3. Apabila kendaraan yang akan menyiap sudah pada lajur untuk menyiap, maka pengemudi harus punya waktu untuk menentukan apakah gerakan menyiap dapat diteruskan atau tidak.
5. Pada saat kendaraan yang menyiap telah berada kembali pada lajur jalannya, maka harus tersedia jarak yang cukup dengan kendaraan yang bergerak dari arah berlawanan.
6. Tinggi mata pengemudi diukur dari dari permukaan perkerasan adalah 3,5 Ft atau sekitar 1,08 meter dan tinggi objek yaitu kendaraan yang akan disiap adalah 4,25 Ft atau sekitar 1,25 meter (menurut AASHTO 2001). Untuk jalan urban, Bina Marga 2005 mengambil tinggi mata pengemudi sama dengan tinggi objek yaitu 1,00 meter.
7. Kendaraan yang bergerak dari arah berlawanan mempunyai kecepatan yang sama dengan kendaraan yang menyiap
Gambar 2.2. Proses Gerakan Menyiap Pada Jalan dua lajur dua arah
Keterangan gambar :
d1 = Jarak yang ditempuh selama waktu reaksi oleh kendaraan yang hendak menyiap dan membawa kendaraannya yang hendak membelok ke lajur kanan.
d2 = Jarak yang ditempuh kendaraan yang menyiap selama berada pada lajur sebelah kanan.
d3 = Jarak bebas yang harus ada antara kendraan yang akan menyiap dengan kendaraan yang berlawanan arah setelah gerakan menyiap dilakukan.
d4 = Jarak yang ditempuh oleh kendaraan yang berlawanan arah selama 2/3 dari waktu yang diperlukan oleh kendaraan yang menyiap berada pada lajur sebelah kanan atau sama dengan 2/3 d2.
Maka Jarak Pandangan menyiap standar adalah :
Jd = d1 + d2 + d3 + d4 (2.9)
dimana :
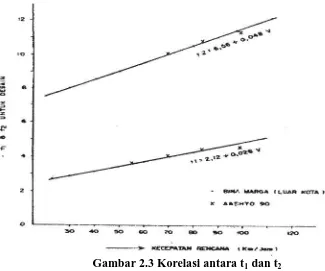
t1= waktu reaksi, yang besarnya tergantung dari kecepatan yang dapat ditentukan dengan korelasi t1 = 2,12 + 0,026 V (menggunakan gambar 2.3)
m = perbedaan kecepatan antara kendaraan yang menyiap dan yang disiap, diambil 15 km/jam.
a = percepatan rata-rata yang besarnya tergantung dari kecepatan rata-rata kendaraan yang menyiap yang dapat ditentukan dengan menggunakan korelasi a = 2,052 + 0,0036 V (menggunakan gambar 2.3)
d2 = 0,278. V. t2 (2.11)
dimana :
t2 = waktu dimana kendaraan yang menyiap berada pada lajur kanan yang dapat ditentukan dengan menggunakan korelasi t2 = 6,56 + 0,048 V
d3 = diambil 30 sampai 100 m
Di dalam perencanaan seringkali kondisi jarak pandangan menyiap standar ini terbatasi oleh kekurangan biaya, sehingga jarak pandangan menyiap yang dipergunakan dapat menggunakan jarak pandangan menyiap minimum (d min), dengan ketentuan d4 = 2/3 d2.
Jd min = d1+ d2 + d3 + 2/3 d2 (2.12)
Dimana :
Jd min = jarak pandangan menyiap minimum (meter)
Gambar 2.3 Korelasi antara t1 dan t2
sumber : Rekayasa Jalan (Sony Sulaksono Wibowo, 2009)
II.2.1 Pengaruh Kelandaian Terhadap Jarak Pandang Menyiap
Kelandaian merupakan faktor yang mempengaruhi terhadap jarak yang diperlukan untuk mendahului. Mendahului akan menjadi lebih mudah pada jalan dengan kelandaian menurun dibandingkan dengan jalan mendaki sebab kendaraan bisa dengan singkat memacu kecepatannya sehingga mengurangi waktu penyiapan.
Perhitungan yang khusus untuk membahas masalah ini tidak ditemui. Solusi untuk masalah ini adalah cara membuat jarak menyiap yang lebih dari hasil yang didapat sebagai “safety” dalam perencanaan.
II.2.2 Frekwensi Pengadaan Jarak Pandang Menyiap
Frekwensi untuk pengadaan jarak pandang menyiap pada seluruh panjang jalan akan sangat mempengaruhi volume pelayanan dari jalan tersebut (level of service). Keadaan topografi dan kecepatan rencana mempengaruhi pengadaan jarak pandang menyiap. Sebagai perencana, haruslah membandingkan effisiensi dari ketersediaan jarak pandang menyiap dan biaya pembangunan jalan yang disesuaikan dengan fungsi dari jalan itu sendiri.
Frekwensi penyiapan juga bergantung kepada tingkat volume dari kendaraan yang ada. Apabila volume kendaraan tinggi, maka untuk terjadinya penyiapan sangat rendah. Ini disebabkan dari pendeknya ketersediaan jarak untuk mengambil lajur sebelah kanan sebelum bertemu kendaraan lain.
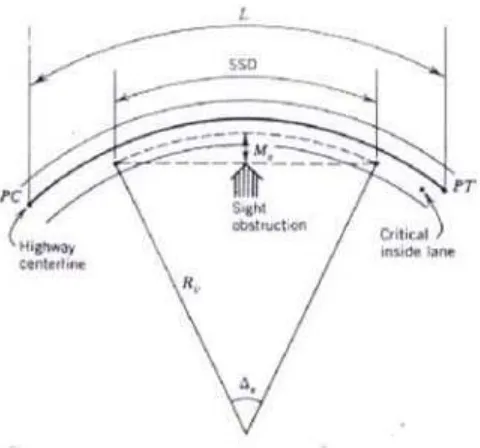
II.3 Jarak Kebebasan Pandang Pada Lengkung Horizontal
Pada saat mengemudikan kendaraan pada kecepatan tertentu, ketersediaan jarak pandang yang baik sangat dibutuhkan apalagi sewaktu kendaraan menikung atau berbelok. Keadaan ini seringkali terganggu oleh gedung-gedung (perumahan penduduk), pepohonan, hutan-hutan kayu maupun perkebunan, tebing galian dan lain sebagainya. Untuk menjaga keamanan pemakai jalan, panjang dari sepanjang jarak henti minimum seperti yang sudah dibahas diatas harus terpenuhi sepanjang lengkung horizontal. Dengan demikian terdapat batas minimum jarak antara sumbu lajur dalam dengan penghalang (E).
Gambar 2.4 Jarak Pandang pada Lengkung Horizontal
sumber : Principles of Highway Engineering And Traffic Analysis (Mannering,
II.3.1 Bila Jarak Kebebasan Pandang Sama Atau Lebih Kecil Dari
Lengkung Horizontal (Jh ≤ L).
Maka perhitungan dengan :
Garis AB = Garis Pandang Lengkung AB = Jarak Pandangan
E = Jarak dari penghalang ke sumbu lajur sebelah dalam (meter)
Ǿ = Setengah sudut pusat lengkung sepanjang Lt
Jh = Jarak Pandang (meter) Lt = Panjang Busur Lingkaran R = Jari-jari tikungan
II.3.2 Bila Jarak Kebebasan Pandang Lebih Besar Dari Lengkung
dimana :
E = Jarak dari penghalang ke sumbu lajur sebelah dalam (meter) Jh = Jarak Pandang (meter)
Lt = Panjang Busur Lingkaran R = Jari-jari tikungan
Gambar 2.5 Jarak penghalang (m), dari sumbu lajur sebelah dalam
Tabel 2.3 berisi nilai E dalam satuan meter yang dihitung dengan persamaan
diatas dengan pembulatan-pembulatan untuk Jh<Lt.
Tabel 2.4 berisi nilai E dalam satuan meter yang dihitung dengan persamaan
diatas dengan pembulatan-pembulatan untuk Jh ≥ Lt.
Tabel 2.5 berisi nilai E dalam satuan meter yang dihitung dengan persamaan
diatas dengan pembulatan-pembulatan untuk Jh- Lt = 50 m
sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota , (Bina Marga ,1997)
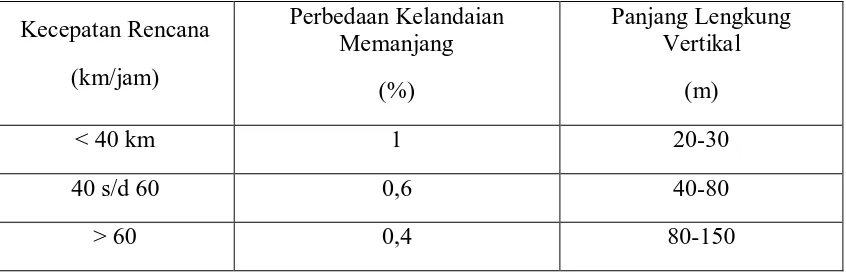
II.4 Jarak Kebebasan Pandang Pada Alinemen Vertikal
Tabel 2.6 Panjang minimum lengkung vertikal
sumber : A Policy on Geometric Design for Highways and Streets, (AASHTO 2001)
II.4.1 Jarak Kebebasan Pandang Pada Lengkung Vertikal Cembung
Pada lengkung vertikal cembung, pembatasan berdasarkan pada jarak pandangan dibedakan atas 2 keadaan :
1. Jarak pandangan berada seluruhnya dalam daerah lengkung (S<L) 2. Jarak pandangan berada diluar dan didalam daerah lengkung (S>L)
II.4.1.1 Jarak Kebebasan Pandangan Berada Seluruhnya Dalam Daerah
Lengkung (S<L)
Gambar 2.6 Jarak Kebebasan Pandang Pada Lengkung Vertikal Cembung
Dari persamaan diatas maka didapat :
Jika dalam perencanaan dipergunakan jarak pandang henti menurut Bina Marga, dimana h1 = 10 cm = 0.10 m dan h2 = 120 cm = 1,2 m maka didapat persamaan:
Jika dalam perencanaan dipergunakan jarak pandangan menyiap menurut Bina Marga, dimana h1 = 120 cm = 1,2 m dan h2 = 120 cm = 1,2 m maka didapat persamaan :
L = Panjang lengkung vertikal
C = Konstanta garis pandangan untuk lengkung vertikal cembung dimana S<L
A = Perbedaan kelandaian (dalam persen)
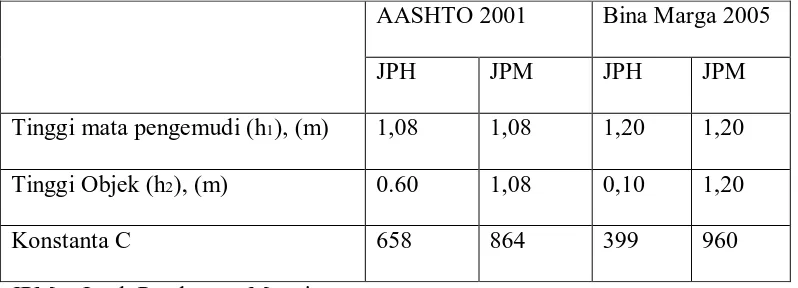
Tabel 2.6 Nilai C untuk beberapa h1 dan h2 berdasarkan AASHTO & Bina
Marga
JPM = Jarak Pandangan Menyiap JPH = Jarak Pandangan Henti
II.4.1.2 Jarak Pandangan Berada Diluar dan Didalam Daerah Lengkung
(S>L)
Gambar 2.7 Jarak Pandangan Pada Lengkung Vertikal Cembung (S>L)
AASHTO 2001 Bina Marga 2005
JPH JPM JPH JPM
Tinggi mata pengemudi (h1), (m) 1,08 1,08 1,20 1,20 Tinggi Objek (h2), (m) 0.60 1,08 0,10 1,20
Panjang lengkung minimum jika dL/dg = 0 maka diperoleh :
maka dengan penyederhanan didapat :
dimana :
S = Jarak pandangan (meter)
L = Panjang lengkung cembung (meter)
h1 = Tinggi mata pengemudi (meter)
A = Jumlah aljabar dari (g1+g2) /perbedaan kelandaian
g = Kelandaian (%)
C = Konstanta garis pandangan untuk lengkung vertikal cembung dimana S<L
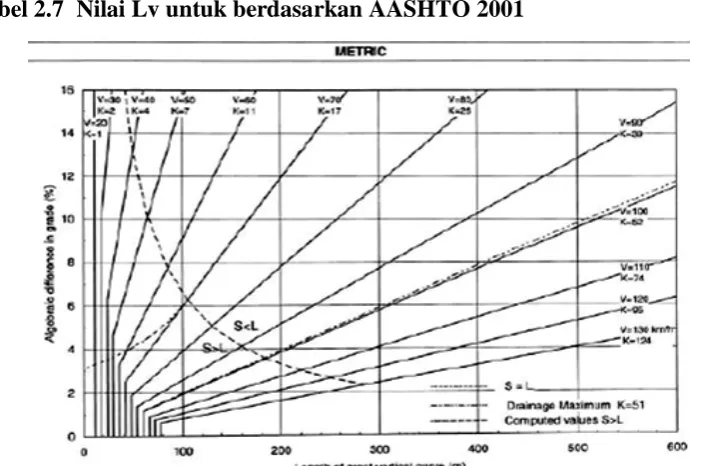
Tabel 2.7 Nilai Lv untuk berdasarkan AASHTO 2001
sumber : A Policy on Geometric Design for Highways and Streets, (AASHTO 2001)
II.4.2 Jarak Pandangan Pada Lengkung Vertikal Cekung
Disamping bentuk lengkung yang berbentuk parabola sedrhana, panjang lengkung vertikal cekung juga harus ditentukan dengan memperhatikan :
1. Jarak penyinaran lampu kendaraan
2. Jarak pandangan bebas dibawah bangunan 3. Persyaratan drainase
5. Keluwesan bentuk
II.4.2.1 Jarak Penyinaran Lampu Kendaraan
Jangkauan lampu depan kendaraan pada lengkung vertikal cekung merupakan batas jarak pandangan yang dapat dilihat oleh pengemudi pada malam hari. Pada perencanaan umumnya tinggi lampu depan diambil setinggi 600 mm atau 2,0 ft dengan sudut penyebaran dimisalkan sebesar i°. Perhitungan batas pandangan ini sangat dibutuhkan untuk menentukan panjang dari lengkung vertikal cekung.
II.4.2.1.1 Lengkung Vertikal Cekung Dengan Jarak penyinaran Lampu
Depan < L
Gambar 2.8 Jarak Pandangan Pada Lengkung Vertikal Cekung (S<L)
sumber : A Policy on Geometric Design for Highways and Streets, (AASHTO , 2001)
Dimana :
L = Panjang lengkung vertikal cekung (meter)
A = Perbedaan Kelandaian (%)
II.4.2.1.2 Lengkung Vertikal Cekung Dengan Jarak penyinaran Lampu
Depan > L
Gambar 2.9 Jarak Pandangan Pada Lengkung Vertikal Cekung (S>L)
sumber : A Policy on Geometric Design for Highways and Streets, (AASHTO, 2001)
Dimana :
L = Panjang lengkung vertikal cekung (meter)
S = Panjang penyinaran lampu depan (meter)
A = Perbedaan Kelandaian (%)
II.4.2.2 Jarak Pandangan Bebas Dibawah Bangunan Pada Lengkung
Vertikal Cekung
jembatan penyeberangan, viaduct, aquaduct, dll. Panjang lengkung vertikal cekung minimum diperhitungkan berdasarkan jarak pandangan henti minimum menurut Bina Marga dengan mengambil tinggi mata pengemudi truk yaitu 1,80 m dan tinggi objek 0,50 m (lampu belakang kendaraan). Ruang bebas vertikal minimum 5 m, disarankan agar dalam pelaksanaannya diambil lebih besar ± 5,5 m yang dimaksudkan untuk memberikan kemungkinan adanya pelapisan ulang (overlay) dikemudian hari.
Tabel 2.8 Perbedaan h1 dan h2 antara Bina Marga dan AASHTO untuk
jarak pandangan bebas dibawah bangunan
Bina Marga
2005 AASHTO 2001
Tinggi mata pengemudi truk, m 1,80 m 2,4 m Tinggi objek (lampu belakang
kendaraan), m 0,50 m 0,6 m (2 ft)
Ruang bebas vertikal minimum (C),
II.4.2.2.1 Jarak Pandangan Bebas Dibawah Bangunan Pada Lengkung
Vertikal Cekung Dengan S<L
Gambar 2.10 Jarak Pandangan Bebas Dibawah Bangunan Pada Lengkung
Vertikal Cekung (S<L)
sumber : A Policy on Geometric Design for Highways and Streets, (AASHTO, 2001)
Diasumsikan titik PPV berada dibawah bangunan, maka:
Jika jarak bebas dari bagian bawah bangunan atas ke jalan adalah C, maka:
S = Jarak pandangan (meter)
L = Panjang lengkung cekung (meter)
h1 = Tinggi mata pengemudi (meter)
h2 = Tinggi objek (meter)
C = Konstanta garis pandangan untuk lengkung vertikal cekung dimana S<L
II.4.2.2.2 Jarak Pandangan Bebas Dibawah Bangunan Pada Lengkung
Vertikal Cekung Dengan S>L
Gambar 2.11 Jarak Pandangan Bebas Dibawah Bangunan Pada Lengkung
Vertikal Cekung (S>L)
Diasumsikan titik PPV berada dibawah bangunan, maka:
maka diperoleh :
II.4.2.2.3 Bentuk Visual Lengkung Vertikal Cekung
Adanya gaya sentrifugal dan gravitasi pada lengung vertikal cekung menimbulkan rasa ketidaknyamanan kepada pengemudi. Untuk itu panjang lengkung vertikal cekung minimum yang dapat memenuhi syarat keamanan adalah :
V = Kecepatan Rencana (km/jam)
A = Perbedaan Kelandaian (%)
L = Panjang Lengkung Vertikal Cekung (meter)
II.4.2.2.4 Kenyamanan Mengemudi Pada Lengkung Vertikal Cekung
II.4.3. Perhitungan Elevasi Kelengkungan Pada Lengkung Vertikal
Perhitungan elevasi pada lengkung vertikal digunakan untuk menentukan ketinggian garis kelengkungan dari datum yang telah ditentukan. Fungsi dari penentuan ini adalah membuat lengkung vertikal tersebut baik lengkung vertikal cekung maupun cembung sesuai dengan standar geometrik dan kemananan terhadap jarak pandang.
II.4.3.1. Perhitungan Elevasi Pada Lengkung Vertikal Cembung dan Cekung
Setelah didapat panjang lengkung vertikal yang memenuhi terhadap jarak pandang dan keamanan, maka panjang lengkung vertikal tersebut akan disesuaikan dengan perbedaan kelandaian. Ketinggian titik-titik yang membentuk lengkung vertikal harus ditentukan agar lengkung tersebut layak dan sesuai dengan standar perencanaan. Panjang lengkung vertikal yang telah didapat harus dibagi dengan segmen-segmen yang sesuai.
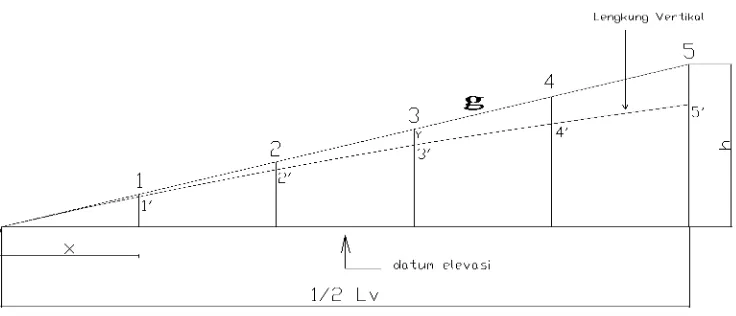
Gambar 2.12. Segmen Untuk Lengkung Vertikal Cembung
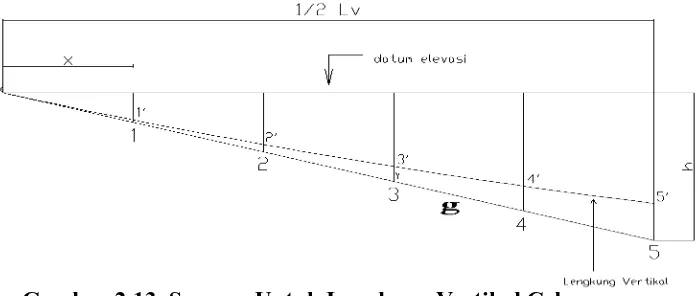
Gambar 2.13. Segmen Untuk Lengkung Vertikal Cekung
sumber : Rekayasa Jalan (Sony Sulaksono Wibowo, 2009)
Elevasi rencana n = Elevasi datum ± g.nX (2.44)
(-) = Untuk Lengkung Vertikal Cembung.
(+) = Untuk Lengkung Vertikal Cekung.
Maka persamaan untuk menghitung elevasi titik di lengkung vertikal adalah:
Elevasi akhir ke-n (meter) = Elevasi rencana n ± Yn (2.47)
(-) = Untuk Lengkung Vertikal Cekung.
(+) = Untuk Lengkung Vertikal Cembung.
n = segmen ke n
X = panjang segmen (meter)
Y = Selisih antara Elevasi rencana dengan Elevasi akhir (meter)
h = Beda Tinggi antara datum ke puncak lengkung vertikal (meter)
II.5 Tipe-Tipe Kecelakaan Pada Jalan Raya
Dalam pengidentifikasian kecelakaan pada lokasi kasus ruas Sei Rampah-Tebing Tinggi diperoleh tipe-tipe kecelakaan yang sering terjadi. Posisi kecelakaan yang sering terjadi pada lokasi kasus adalah :
1. Tabrak depan, yaitu kecelakaan yang terjadi pada saat kendaraan bertabrakan pada bagian depan masing-masing kendaraan dalam arah yang berlawanan. Keadaan ini paling sering terjadi pada lokasi, yang diakibatkan oleh bertemunya kendaraan pada saat mendahului atau masuk ke lajur lawan.
2. Tabrak belakang, yaitu kecelakaan yang terjadi pada saat bagian depan sebuah kendaraan menabrak bagian belakang dari kendaraan yang berada pada arah yang sama. Kondisi ini terjadi pada saat kendaraan yang berada didepannya mengerem secara tiba-tiba akibat dari adanya halangan dari kendaraan ataupun benda.
samping kendaraan tersebut pada arah yang sama, atau arah yang berlainan pada jalur yang berlainan.
4. Tabrak sudut, yaitu tabrakan yang terjadi pada kendaraan dengan arah yang berbeda tetapi tidak berlawanan arah (kendaraan yang satu menabrak kendaraan yang lain dengan membentuk sudut). Kondisi ini terjadi pada lokasi kasus diakibatkan oleh seringnya kendaraan penduduk sekitar secara tiba-tiba masuk ke jalan sehingga mengakibatkan kendaraan dengan kecepatan tinggi langsung menabrak.
5. Kehilangan kendali, yaitu kecelakaan yang terjadi pada saat pengemudi tidak dapat mengendalikan kendaraannya sehingga terjadi tabrakan yang mengakibatkan terbaliknya kendaraan tersebut. Kondisi ini sering terjadi pada saat kondisi hujan deras dan pada waktu malam hari.
BAB III
INFORMASI LOKASI STUDI DAN METODOLOGI
III.1 Lokasi Penelitian
Lokasi penelitian ini adalah pada jalan Serdang yaitu jalan luar kota Sei Rampah-Tebing Tinggi pada Km 70 -71 tepatnya di Desa Sei Bamban, Km 65 tepatnya Desa Pon, dan Km 56 tepatnya Desa Firdaus. Ruas jalan ini termasuk jalan luar kota atau disebut dengan Jalan Nasional 1 yang wewenang pembinaannya oleh Pemerintah Pusat. Berdasarkan peranannya, jalan ini termasuk jalan arteri kelas II dimana merupakan jalan umum yang berfungsi untuk melayani angkutan utama dengan ciri perjalanan jarak jauh, kecepatan rata-rata tinggi dan jumlah jalan masuk dibatasi secara berdaya guna. Jalan arteri ini didesain berdasarkan kecepatan rencana pada medan jalan bukit sebesar 60 km/jam dengan lebar badan jalan 7 m dan 2 arah yang berbeda tanpa median. Yang dimaksud dengan kecepatan rencana adalah kecepatan yang dapat dicapai bila berjalan tanpa gangguan dan aman. Jalan dengan kecepatan rencana 60 km/jam adalah jalan yang didesain dengan persyaratan-persyaratan geometrik yang diperhitungkan terhadap kecepatan maksimum sehingga volume perencanaan kendaraan bermotor tidak melebihi 60 km/jam dengan aman. Jalan luar kota Sei Rampah–Tebing Tinggi ini memiliki kelandaian minimum 3 %.
dapat terlaksana. Untuk itu fungsi jalan raya harus memberikan dampak yang sebesar-besarnya bagi penggunanya.
Tabel 3.1 Klasifikasi Menurut Kelas Jalan
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, (Bina Marga
1997)
Tabel 3.2 Kecepatan Rencana Sesuai Fungsi dan Klasifikasi Medan Jalan
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, (Bina Marga
1997)
geometrik jalan ini sudah memberikan ketersediaan jarak pandang yang baik bagi pengemudi.
Gambar 3.1 Lokasi Kasus
III.2 Identifikasi Daerah Penelitian
Pengidentifikasian daerah penelitian disini dimaksudkan untuk mengetahui dan mengidenifikasi kondisi yang ada serta menghimpun informasi permasalahan yang bersifat umum guna mengidentifikasi permasalahan serta rencana pemecahannya. Survei pendahuluan ini meliputi survei kondisi daerah kasus, pengumpulan data-data primer maupun sekunder dan identifikasi permasalahan yang ada.
III.3 Pengumpulan Data
koordinat-koordinat dan elevasi untuk pemetaan situasi (site plan) dari kondisi jalan sebenarnya yang akan diubah kedalam bentuk gambar yang akan dianalisa melalui perhitungan.
Dari data kecelakaan yang terjadi pada lokasi tersebut yang diperoleh dari Polres Serdang Bedagai juga diikutsertakan dalam penelitian ini sebagai penguat alasan kenapa dipilih ruas jalan ini untuk diteliti mengenai ketersediaan jarak pandang pada alinemen vertikal dan horizontalnya.
III.4 Pengolahan Data
Dalam proses pengolahan data ini nantinya akan melalui beberapa tahapan yang pada akhirnya akan didapatkan hasil analisa yang akan menjawab semua tujuan penelitian ini.
Secara umum proses pengolahan data ini sebagai berikut:
1. Studi literatur, yaitu dengan cara mengumpulkan data-data yang berhubungan dengan tugas akhir ini bersumberkan dari buku-buku serta refrensi lainnya sebagai pendekatan teori maupun sebagai perbandingan untuk mengkaji penelitian ini.
2. Pengambilan data, dalam penelitian ini digunakan dua data sumber yaitu :
Serdang Bedagai meliputi : koordinat titik-titik dari trase jalan dan lokasi, elevasi, kecepatan, dan kondisi geometrik serta keadaan daerah dari lokasi kasus tersebut.
b) Data Sekunder yang diperoleh dari Polres Serdang Bedagai berupa data mengenai jumlah kecelakaan lalu lintas, korban kecelakaan, serta kerugian material yang telah ditimbulkan dari kecelakaan tersebut selama beberapa tahun.
3. Trase jalan dibagi dengan dua kondisi yaitu :
a) Kondisi pada alinemen horizontal, yaitu membahas tentang ketersediaan jarak pandang untuk penyiapan pada jalan lurus, jarak pengereman, jarak pandangan untuk berhenti dan keterbatasan pandangan pada tikungan akibat adanya gangguan dari benda yang berada dipinggir dari jalan yang ditinjau.
b) Kondisi pada alinemen vertikal, yaitu membahas tentang ketersediaan jarak pandang disesuaikan dengan bentuk lengkung vertikal yang ada.
Gambar 3.2 Bagan Pengolahan Data
PENGOLAHAN DATA
DATA PRIMER
Survey dan data geometrik yang ada
DATA SEKUNDER Data Korban Kecelakaan
ALINEMEN HORIZONTAL
ALINEMEN VERTIKAL SEBAGAI REFERENSI
BAB IV
ANALISA DATA
IV.1 Perencanaan Pada Alinemen Horizontal
Pada perhitungan jarak pandang ini adalah untuk menghitung ketersediaan jarak pandang pada tikungan ketika kendaraan memasuki tikungan agar pengendara dapat mengetahui adanya kendaraan lain dari arah berlawanan.
Pada umumnya kendala jarak pandang pada alinemen horizontal di ruas Sei Rampah-Tebing Tinggi adalah terhalangnya pandangan pengendara akibat kondisi tikungan yang cukup tajam dan terhalang oleh pepohonan dan rumah penduduk disamping jalan.
Dalam pembahasan kali ini alinemen horizontal yang ditinjau pada 2 lokasi. Pada lokasi pertama mengevaluasi satu tikungan dan pada lokasi kedua mengevaluasi dua tikungan ganda.
IV.1.1 Analisa Tikungan Km 65 Desa Pon
Kondisi medan datar.
Didapat dilapangan :
V rencana = 60 Km/Jam ; R = 188 m; Δ = 62º
Jh = 75 m (berdasarkan Tabel 2.2)
Penyelesaian :
TC = R tan 0,5∆
TC = 188 . tan 0,5 (62º) = 112.96 m
Dengan Pembulatan didapat TC = 113 meter.
Dengan menggunakan persamaan (2.15):
didapat m = E = 3,72 m, untuk keamanan diagunakan pembulatan.
Maka diambil E = 4 m.
E yang berada di lokasi = 7 m.
Maka Tikungan diatas memenuhi ketersediaan jarak pandang yang telah ditentukan.
IV.1.2 Analisa Tikungan Di Km 71 Desa Sei Bamban
Tikungan I
Kondisi medan datar
V rencana = 60 Km/Jam
Didapat dilapangan :
R1 = 122 m
∆1 = 35°
Jh = 75 m (berdasarkan Tabel 2.2)
Lt = 79.3 m
E tersedia = 7 m
Penyelesaian:
TC = R tan 0,5 (∆)
= 122 . tan 0,5 (35°)
= 38.46 m
Dengan menggunakan persamaan (2.15)
diperoleh E = 5.71 m
Diambil E = 6 m
Dengan demikian tikungan I memenuhi ketersediaan jarak pandang pada alinemen horizontal ditikungan.
Tikungan II
Kondisi medan datar
Didapat dilapangan:
V rencana = 60 Km/jam
R2= 160 m
∆2 = 16°
Jh = 75 m (berdasarkan Tabel 2.2)
Lt = 44.7 m
E tersedia = 1,73 m
Penyelesaian:
TC = R tan 0,5 (∆)
TC = 160 tan 0,5 (16)
= 22.48 m
Dengan menggunakan persamaan (2.16)
didapat E = 4.417 m
Hasil dari E tidak memenuhi untuk tikungan II, maka setiap benda yang ada sejauh min 4.5 m dari as lajur jalan harus ditiadakan.
Gambar 4.2 Alinemen Horizontal pada tikungan di km 71
IV.2 Perencanaan Pada Alinemen Vertikal
Dalam pembahasan kali ini telah ditinjau tiga lokasi yang memiliki Lengkung Vertikal dan dinilai layak untuk dievaluasi.
IV.2.1 Analisa Lengkung Vertikal I pada Km 56 Desa Firdaus
Lengkung Vertikal Cembung.
Vr = 60 Km/jam
S = 75 Km/jam (didapat dari Tabel 2.2)
g1 = 2,46 %
g2 = - 3,75 %
A = g1-g2 = 2,46- (- 3,75)
= 6,21 %
Lv min = 82 m
Lv tersedia = 120 m
• Elevasi rencana dihitung dari titik awal masuk lengkung vertikal
dan titik akhir lengkung vertikal yaitu dianggap = 0 m
• Jarak x dihitung dari awal Lv sampai ½ Lv dengan kemiringan
g1.
• Jarak x dihitung dari awal Lv sampai ½ Lv dengan kemiringan
• Perhitungan Y diselesaikan dengan persamaan (2.46):
• Elevasi akhir adalah = Elevasi rencana - Y
Evaluasi Lengkung Vertikal
Perhitungan dari arah kiri ke kanan.
∆ h = 0,5 . Lv. g1
= 1,476 m
Untuk X = 20 m
Perhitungan dimulai dari elevasi acuan = 0 m
g = 2.46 %
Y = 0,1 m
Elevasi rencana = Elevasi awal + g.X
= 0.492 m
Elevasi yang memenuhi dari garis acuan = 0.492-0.1
Untuk X = 40 m
Perhitungan dimulai dari elevasi acuan = 0 m
g = 2.46 %
Y = 0,41 m
Elevasi Rencana = Elevasi Awal + g.X
= 0,98 m
Elevasi yang memenuhi dari garis acuan = (0,98) – (0,41)
= 0,57 m
Perhitungan dari kanan ke kiri
Untuk X = 20 m
Perhitungan dimulai dari elevasi acuan = 0 m
g = -3,75%
Y = 0,11 m
Elevasi Rencana = Elevasi Awal + g.X
= 0,75 m
Elevasi yang memenuhi dari garis acuan = (0,75) – (0,11)
Untuk X = 40 m
Perhitungan dimulai dari elevasi acuan = 0 m
g = -3,75%
Y = 0,414 m
Elevasi Rencana = Elevasi Awal + g.X
= 1,5 m
Elevasi yang memenuhi dari garis acuan = (1,5) – (0,414)
= 1,08 m
Dengan demikian lengkung vertikal II pada Km 56 Desa Firdaus tidak memenuhi standar keamanan dan ketersediaan jarak pandang dan perlu ditinjau ulang.
IV.2.2 Analisa Lengkung Vertikal II pada Km 56 Desa Firdaus
Lengkung Vertikal Cembung.
Vr = 60 Km/jam
S = 75 Km/jam (didapat dari Tabel 2.2)
g1 = 0,2 %
g2 = - 11,05 %
= 0,2- (- 11,05)
= 11,25 %
Lv min = 150 m
Lv tersedia = 40 m
Maka lengkung tidak memenuhi persyaratan dengan kecepatan rencana 60 Km/jam.
Harus Menggunakan V rencana 40 Km/Jam dengan Lv min = 40 m.
Evaluasi Lengkung Vertikal
Perhitungan dari arah kiri ke kanan.
Karena g yang hampir 0 % maka tidak perlu dilakukan perhitungan.
Perhitungan dari kanan ke kiri
Untuk X = 5 m
Perhitungan dimulai dari elevasi acuan = 0 m
g = -11,05%
Y = 0,035 m
Elevasi Rencana = Elevasi datum ± g.nX
= 0,55 m
Untuk X = 10 m
Y = 0,14 m
Elevasi Rencana = Elevasi datum ± g.nX
= 1,10 m
Elevasi yang memenuhi dari garis acuan = (1,10) – (0,14)
= 0,96 m
Untuk X = 15 m
Y = 0,31 m
Elevasi Rencana = Elevasi datum ± g.nX
= 1,65 m
Elevasi yang memenuhi dari garis acuan = (1,65) – (0,31)
= 1,34 m
Untuk X = 20 m
Y = 0,56 m
Elevasi Rencana = Elevasi datum ± g.nX
= 2,21 m
Elevasi yang memenuhi dari garis acuan = (2,21) – (0,56)
Dengan demikian lengkung vertikal II pada Km 56 Desa Firdaus tidak memenuhi standar keamanan dan ketersediaan jarak pandang dan perlu ditinjau ulang.
Kecepatan Rencana yang sesuai adalah 40 Km/Jam.
IV.2.3 Analisa Lengkung Vertikal III pada Km 71 Desa Sei Bamban
Lengkung Vertikal Cembung.
Vr = 60 Km/jam
S = 75 Km/jam (didapat dari Tabel 2.2)
g1 = 6,39 %
g2 = - 4,16 %
A = g1-g2
= 6,39- (- 4,16)
= 10,55%
Lv min = 150 m
Lv tersedia = 50 m
Maka lengkung tidak memenuhi persyaratan dengan kecepatan rencana 60 Km/jam.
Evaluasi Lengkung Vertikal
Perhitungan dari arah kiri ke kanan.
Untuk X = 12,5 m
Y = 0,16 m
g = 6,39 %
Elevasi Rencana = Elevasi datum ± g.nX
= 0,79 m
Elevasi yang memenuhi dari garis acuan = (0,79) – (0,16)
= 0,63 m
Untuk X = 25 m
Y = 0,65 m
g = 6,39 %
Elevasi Rencana = Elevasi datum ± g.nX
= 1,59 m
Elevasi yang memenuhi dari garis acuan = (1,59) – (0,65)
Perhitungan dari kanan ke kiri
Untuk X = 12,5 m
Y = 0,16 m
g = -4,16 %
Elevasi rencana n = Elevasi datum ± g.nX
= 0,52 m
Elevasi yang memenuhi dari garis acuan = (0.52) – (0,160)
= 0,36 m
Untuk X = 25 m
g = -4,16 %
Y = 0,65
Elevasi Rencana = Elevasi datum ± g.nX
= 1,04 m
Elevasi yang memenuhi dari garis acuan = (1,04) – (0,.65)
= 0,39 m
BAB V
KESIMPULAN DAN SARAN
V.1 Kesimpulan
Dari hasil perhitungan yang telah dilakukan dalam evaluasi jarak pandang pada alinemen vertikal dan horizontal pada tikungan, dapat diambil beberapa kesimpulan:
1. Ketersediaan jarak pandang pada alinemen horizontal pada tikungan di Km 65 Desa Pon dan Km 71 pada tikungan pertama telah memenuhi persyaratan teknis dari hasil perhitungan yang dilakukan oleh penulis, ini diperlihatkan diantaranya oleh:
Data tikungan Km 65 Desa Pon
Jh = 75 m
E tersedia = 7 m E perhitungan = 4 m
R = 188 m
Data tikungan I Km 71 Desa Sei Bamban
Jh = 75 m
E tersedia = 7 m E perhitungan = 6 m
Maka tikungan pada Km 65 dan Km 71 ini masih layak untuk kondisi sekarang ini.
2. Untuk Ketersediaan jarak pandang pada tikungan II km 71 Desa Sei Bamban tidak memenuhi persyaratan teknis dari hasil perhitungan yang telah dilakukan oleh penulis, ini diperlihatkan diantaranya oleh:
Jh = 75 m
E tersedia = 1,73 m E perhitungan = 4.5 m
R = 160 m
Maka tikungan ini tidak layak untuk kondisi jalan sekarang ini dan penghalang yang berada harus ditiadakan.
3. Untuk ketersediaan jarak pandang pada alinemen vertikal di km 56 Desa Firdaus baik lengkung vertikal pertama maupun kedua tidak memenuhi persyaratan teknis yang telah dilakukan oleh penulis. Kondisi ini salah satu penyebab tingginya tingkat kecelakaan pada lokasi kasus.
4. Untuk ketersediaan jarak pandang pada alinemen vertikal di km 71 tidak memenuhi persyaratan teknis yang telah dilakukan oleh penulis.
V.2 Saran
Adapun saran yang dibuat antara lain :
1. Untuk mengurangi tingkat kecelakaan pada lengkung vertikal di km 56, km 65, dan km 71, Dinas Jalan Dan Jembatan perlu mengevaluasi kembali perencanaan yang telah dibuat dengan cara memotong lengkung vertikal agar sesuai dengan standar perencanaan. (cut and fill , en.wikipedia.org, 2010)
2. Membuat rambu pengurangan kecepatan pada Km 56 Desa Firdaus dan Km 71 Desa Sei Bamban. Kecepatan Rencana yang memenuhi adalah 40 Km/Jam.
3. Perlunya kesadaran berlalulintas bagi pengemudi agar mematuhi semua rambu yang telah dibuat.
DAFTAR PUSTAKA
American Association of State Highway and Transportation Officials. 1994. A Policy on Geometric Design of Urban and Rural Highway. Washington DC.
American Association of State Highway and Transportation Officials. 2001. A policy on Geometric Design for Highways and Streets, Washington DC.
Departemen Pekerjaan Umum. “Pengawasan Alinemen Horizontal Bab XVI”. http:// www. pu.org.id (diakses tanggal 1 Agustus 2010)
Direktorat Jenderal Bina Marga, Departemen Pekerjaan Umum. 1997. Tata Cara Perencanaan Geometrik Jalan Antar Kota. Jakarta.
Direktorat Jenderal Bina Marga, Departemen Pekerjaan Umum. 2005. Spesifikasi Standar Untuk Perencanaan Geometrik Jalan Luar Kota. Jakarta.
Direktorat Jenderal Perhubungan Darat. 2006. Rencana Umum Keselamatan Transportasi Darat. Jakarta.
en.wikipedia.org “Cut and Fill”. http: Agustus 2010)
Peraturan Pemerintah Republik Indonesia Nomor 34. 2006. Tentang Jalan
Undang-Undang Republik Indonesia Nomor 38. 2004. Tentang Jalan.
Sukirman, S. 1994. Dasar-dasar Perencanaan Geometrik Jalan. Bandung: Nova.
Suraji, Aji; Abdul Halim, Candra Aditya. 2008. Rekayasa Lalu Lintas, Diktat Kuliah Teknik Sipil Universitas Widyagama. Malang: Universitas Widyagama.
Sony Sulaksono Wibowo. 2009. Rekayasa Jalan. Bandung: ITB.