Gelar Sarjana Teknik Elektro Pada Program Strata Satu (S-1) Jurusan Teknik Elektro Fakultas Teknik
Universitas Muhammadiyah Yogyakarta
Disusun oleh : DARU BARRO SAPUTRO
(20120120056)
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
i
Disusun Sebagai Salah Satu Syarat Memperoleh Gelar Sarjana Teknik Elektro Pada Program Strata Satu (S-1)
Jurusan Teknik Elektro Fakultas Teknik Universitas Muhammadiyah Yogyakarta
Disusun oleh : DARU BARRO SAPUTRO
(20120120056)
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
ii
DISUSUN OLEH : DARU BARRO SAPUTRO
NIM : 20120120056
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
v
Nama : Daru Barro Saputro
NIM : 20120120056
Jurusan : Teknik Elektro Menyatakan bahwa :
Semua yang ditulis dalam naskah skripsi ini merupakan hasil karya tulis saya sendiri dan bukan menjiplak hasil karya orang lain, kecuali dasar teori yang saya cuplik dari buku yang tercantum pada daftar pustaka sebagai referensi saya dalam melengkapi karya tulis ini. Apabila dikemudian hari pernyataan ini tidak benar, maka saya siap menerima sanksi dari Universitas Muhammadiyah Yogyakarta sesuai dengan peraturan yang berlaku.
Yogyakarta, 1 Agustus 2016 Yang menyatakan,
vi
Puji syukur saya panjatkan kepada Allah SWT tuhan semesta alam yang telah memberikan kenikmatan, kebahagiaan, kecerdasan, dan kesehatan sehingga atas berkat dan rahmat-Nya, saya dapat menyelesaikan tugas akhir ini. Penulisan tugas akhir ini dilakukan dalam rangka memenuhi salah satu syarat untuk mencapai gelar Sarjana Teknik Jurusan Teknik Elektro Universitas Muhammadiyah Yogyakarta. Saya menyadari bahwa tanpa bantuan dan bimbingan dari berbagai pihak untuk menyusun tugas akhir ini, sangatlah sulit bagi saya untuk menyelesaikan tugas akhir ini. Oleh karena itu, saya mengucapkan terimakasih kepada :
1) Allah SWT karena atas izin-Nya tugas akhir ini dapat terselesaikan; 2) Ir. Agus Jamal, M.Eng, selaku Ketua Jurusan beserta dosen-dosen Teknik
Elektro Universitas Muhammadiyah Yogyakarta yang telah mendidik saya selama dibangku kuliah;
3) Dr. Ramadhoni Syahputra, S.T., M.T., selaku dosen pembimbing I yang telah meluangkan waktu, memberikan saran dan bimbingan kepada saya dalam penyusunan tugas akhir ini;
4) Rama Okta Wiyagi, S.T., M.Eng, selaku dosen pembimbing II yang telah menyediakan waktu, memberikan banyak masukan, semangat dan solusi atas kendala yang saya hadapi dalam penyusunan tugas akhir ini;
5) Muhamad Yusvin Mustar, S.T., M.Eng., selaku dosen penguji yang telah menguji dan memberi masukan kepada saya pada sidang tugas akhir ini; 6) Pak Indri sebagai staf Laboratorium Teknik Elektro yang telah
memberikan izin peminjaman alat;
vii
teman curhat, berantem, ketawa, sedih, teman main dan penyemangat dari awal kuliah sampai dengan penyelesaian tugas akhir ini;
9) Uswatun Hasanah sebagai adik dan sahabat seperjuangan yang telah berbagi masalah, cerita, ilmu, canda, suka, dan duka. Adik yang selalu merepotkan abangnya;
10) Dewi Kesuma Handayani sebagai nenek yang selalu bawel kalo lagi cerita, teman seperjuangan dari awal kuliah sampai penyelesaian tugas akhir ini;
11) Team Squad (Adis, Ryan, Putra, Afiqoh, Nadya, Amal, dan Muninggar) sebagai penyemangat dan yang selalu menanyakan kapan lulus;
12) Kontrakan Barokah (Obi (si tho), Fahmi (kajine), Galih (dobleh), Diva (komar),dan Fathan (bibin)) yang menjadi tempat berkumpul dan bercanda;
13) Teman Kuliah (Azhar, Nanda, Mukti, Jarot, Ical, Amin, Widya, Agem, Uswah dan Yulia);
14) Team MRC (Microkontroller & Robotic Club) yang telah memberi dukungan dan meminjamkan berbagai alat yang dibutuhkan dalam penyelesaian tugas akhir ini;
15) Gunawan Eka Prasetyo dan Dwi Verdi Firmansyah yang sangat membantu dalam penyelesaian tugas akhir ini;
16) Teman-teman TE 2012’UMY, KKN 05, dan semua pihak yang tidak bisa disebutkan satu persatu dalam pembuatan tugas akhir ini;
viii
Yogyakarta, 1 Agustus 2016 Penulis
x
HALAMAN PENGESAHAN ... ii
HALAMAN PENGESAHAN I ... iii
HALAMAN PENGESAHAN II ... iv
HALAMAN PERNYATAAN ... v
KATA PENGANTAR ... vi
INTISARI ... ix
DAFTAR ISI ... x
DAFTAR GAMBAR ... xiii
DAFTAR TABEL ... xvii
BAB I ... 1
PENDAHULUAN ... 1
1.1Latar Belakang ... 1
1.2Permasalahan... 2
1.3Batasan Masalah... 2
1.4Tujuan ... 3
1.5Manfaat yang Diperoleh ... 4
1.6Sistematika Penulisan Laporan ... 4
BAB II ... 6
DASAR TEORI ... 6
xi
2.3Perangkat Pengendali Gimbal 3-Axis ... 13
2.3.1 Sensor MPU-6050 (6 Axis GY-521) ... 13
2.3.2 Arduino Pro Micro (5V/16MHz) ... 18
2.3.3 Radio Telemetry Kit 3DR ... 23
2.4Sistem Komunikasi ... 25
2.4.1 PWM (Pulse Width Modulation) ... 25
2.4.2 I²C (Inter-Intergrated Circuit) ... 29
2.4.3 UART (Universal Asynchronous Receiver Transmitter) ... 31
2.5Arduino IDE (Integrated Development Environment) ... 33
BAB III ... 35
METODE PENELITIAN ... 35
3.1Diagram Alir Penelitian ... 35
3.1.1 Penjelasan Blok Diagram ... 36
3.2Rancangan ... 37
3.2.1 Skenario Perancangan ... 39
3.2.2 Perancangan Sensor ... 40
xii
Rangkaian Kontroler ... 46
3.2.5 Perancangan Perangkat Lunak (software) ... 51
3.2.6 Perancangan Akhir dan Penempatan Komponen ... 53
BAB IV ... 58
PENGUJIAN DAN ANALISIS SISTEM ... 58
4.1 Analisis dan Pengujian ... 58
4.2Data Pengujian ... 58
4.2.1 Pengujian Sensor Sudut (MPU-6050) ... …59
4.3Pengujian Keseluruhan Sistem ... 82
4.3.1 Pengujian Pergerakan Gimbal 3-Axis Mengikuti Gesture Kepala Secara Real Time ... 82
BAB V ... 95
KESIMPULAN DAN SARAN ... 95
5.1Kesimpulan ... 95
5.2Saran ... 96
DAFTAR PUSTAKA ... 97
xiii
Gambar 2.2 Storm32 with 32Bit 3-Axis Brushless ... 9
Gambar 2.3 Brushless DC Motor ... 10
Gambar 2.4 Bagian-bagian Brushless Motor ... 12
Gambar 2.5 Sensor MPU-6050 ... 13
Gambar 2.6 Skema Rangkaian Modul Sensor MPU-6050 ... 14
Gambar 2.7 Arduino Pro Micro ... 19
Gambar 2.8 Konfigurasi Pinout Arduino Pro Micro ... 20
Gambar 2.9 ATMega32u4 Pin Diagram... 22
Gambar 2.10 Radio Telemetry Kit 3DR ... 23
Gambar 2.11 Sinyal PWM ... 25
Gambar 2.12 Sinyal PWM dan Persamaan Vout PWM ... 26
Gambar 2.13 Duty Cycle dan Resolusi PWM……….…………...27
Gambar 2.14 Pulsa Kendali Motor Servo ... 29
Gambar 2.15 Start Sequence dan Stop Sequence ... 30
Gambar 2.16 Parameter Komunikasi UART ... 32
Gambar 2.17 Tampilan Arduino IDE ... 34
Gambar 3.1 Diagram Blok Alir Penelitian ... 35
Gambar 3.2 Diagram Blok Keseluruhan Sistem....………38
Gambar 3.3 Skenario Perancangan Head Unit dan Gimbal ..………40
xiv
Gambar 3.8 Skema Rangkaian Shield Board Untuk Gimbal 3-Axis ... 45
Gambar 3.9 Desain Jalur Shield Board Untuk Head unit Pada PROTEUS ARES ... 48
Gambar 3.10 Desain Jalur Shield Board Untuk Gimbal 3-Axis Pada PROTEUS ARES ... 48
Gambar 3.11 Proses Pemindahan Layout Jalur Ke Shield Board... 49
Gambar 3.12 Proses Pelarutan Shield Board Menggunakan Cairan FeCl3 ... 49
Gambar 3.13 Proses Pengeboran Shield Board ... 50
Gambar 3.14 Proses Pemasangan Komponen Pada Shield Board ... 50
Gambar 3.15 Flowchart Prinsip Kerja Sistem Software Secara Keseluruhan ... 52
Gambar 3.16 Head unit Tampak Depan ... 54
Gambar 3.17 Head unit Tampak Atas ... 55
Gambar 3.18 Head unit Tampak Kanan ... 55
Gambar 3.19 Head unit Tampak Kiri ... 55
Gambar 3.20 Gimbal 3-Axis Tampak Depan... 56
Gambar 3.21 Gimbal 3-Axis Tampak Atas ... 56
Gambar 3.22 Gimbal 3-Axis Tampak Kanan... 57
Gambar 3.23 Gimbal 3-Axis Tampak Kiri... 57
xv
Gambar 4.4 Grafik Perbandingan Nilai Sensor MPU6050 (Pitch) yang Diukur
Dengan Nilai Busur Derajat Terukur ... 74
Gambar 4.5 Alat Pengujian Sensor MPU6050 Sumbu X (Roll) ... 74
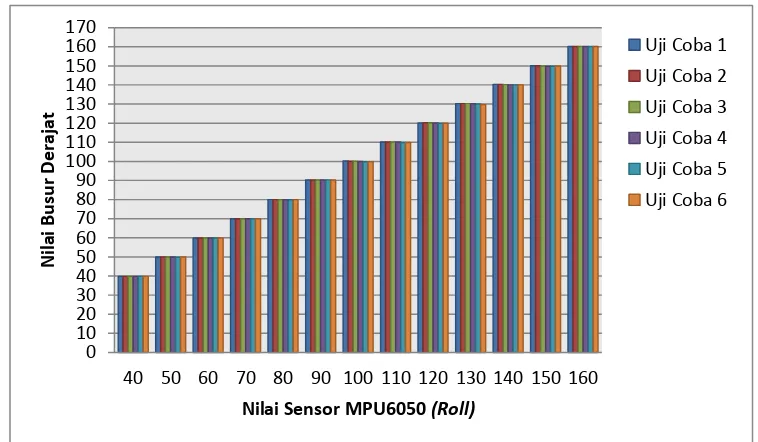
Gambar 4.6 Grafik Perbandingan Nilai Sensor MPU6050 (Roll) yang Diukur Dengan Nilai Busur Derajat Terukur ... 82
Gambar 4.7 Posisi Sudut Kepala 40° Yang Diikuti Oleh Gimbal (Yaw) ... 84
Gambar 4.8 Data Sudut Gimbal Pada Sumbu Yaw 40° ... 84
Gambar 4.9 Posisi Sudut Kepala 90° Yang Diikuti Oleh Gimbal (Yaw) ... 85
Gambar 4.10 Data Sudut Gimbal Pada Sumbu Yaw 90° ... 85
Gambar 4.11 Posisi Sudut Kepala 140° Yang Diikuti Oleh Gimbal (Yaw) ... 86
Gambar 4.12 Data Sudut Gimbal Pada Sumbu Yaw 140° ... 86
Gambar 4.13 Posisi Sudut Kepala 60° Yang Diikuti Oleh Gimbal (Pitch) ... 87
Gambar 4.14 Data Sudut Gimbal Pada Sumbu Pitch 60° ... 87
Gambar 4.15 Posisi Sudut Kepala 90° Yang Diikuti Oleh Gimbal (Pitch) ... 88
Gambar 4.16 Data Sudut Gimbal Pada Sumbu Pitch 90° ... 88
Gambar 4.17 Posisi Sudut Kepala 150° Yang Diikuti Oleh Gimbal (Pitch) ... 89
xvi
Gambar 4.21 Posisi Sudut Kepala 90° Yang Diikuti Oleh Gimbal (Roll) ... 91 Gambar 4.22 Data Sudut Gimbal Pada Sumbu Roll 90° ... 91 Gambar 4.23 Posisi Sudut Kepala 140° Yang Diikuti
xvii
Tabel 4.2 Tabel Pengujian Nilai Yaw Sensor MPU6050 ... 60
Tabel 4.3 Tabel Pengujian Nilai Pitch Sensor MPU6050 ... 68
Tabel 4.4 Tabel Pengujian Nilai Roll Sensor MPU6050 ... 75
ix Program Studi : S1 Teknik Elektro
Judul :
SISTEM KENDALI ARAH GIMBAL 3-AXIS MENGGUNAKAN GESTURE KEPALA
Tugas akhir ini membahas tentang bagaimana membuat sistem penggerak berdasarkan gesture kepala untuk diaplikasikan sebagai pengendali arah gimbal 3-axis. Agar gimbal 3-axis dapat bergerak mengikuti pergerakan kepala pada sumbu X, Y, dan Z, maka dibentuklah suatu alat rancang bangun dengan berbagai macam komponen didalamnya seperti, sensor sudut sebagai batasan pergerakan gimbal pada sumbu X, Y, dan Z, gimbal 3-axis sebagai alat yang dikendalikan, telemetri sebagai komunikasi data, dan mikrokontroler untuk mengendalikan pergerakan gimbal. Dari analisis data percobaan keseluruhan sistem, sistem ini bekerja dengan baik dan mempunyai nilai error kurang dari 3%.
Kata Kunci :
1 BAB I PENDAHULUAN
1.1 Latar Belakang
Dalam melakukan pengambilan gambar di udara, banyak media yang bisa digunakan dan dengan semakin berkembangnya teknologi saat ini terutama dalam ilmu pengetahuan, membuat segala sesuatunya dapat dikerjakan dengan mudah dan cepat. Dalam bidang elektronika, robot adalah suatu alat yang dapat digunakan untuk mempermudah suatu pekerjaan. Robot yang perkembangannya sangat pesat yaitu drone atau sering disebut sebagai UAV (Unmanned Aerial Vehicle) yang memiliki berbagai bentuk, ukuran, dan karakter yang berbeda-beda.
Saat mengudara, sebuah drone tidak selalu dapat mempertahankan posisinya dengan mulus. Hal ini karena terdapat berbagai macam hambatan, seperti angin, cuaca tidak menentu, kegagalan sistem dan melakukan beberapa manuver yang membuat gerakan tidak stabil. Gerakan yang tidak stabil ini akan mempengaruhi hasil akhir pengambilan gambar video maupun foto. Sebagai contoh, hasil foto bisa kurang fokus dan terjadi efek blur pada gambar atau bisa juga menyebabkan hasil video menjadi bergoyang-goyang. Karena alasan tersebut, teknologi kamera dan perangkat pendukungnya terus ditingkatkan. Perangkat pendukung yang sering digunakan saat pengambilan gambar adalah gimbal. Biasanya yang digunakan untuk pengendali gerak kamera pada sumbu x, y, dan z adalah gimbal 3-axis.
kamera. Pada sistem PTZ, gimbal digunakan untuk menggerakkan kamera pada sudut pitch, roll, dan yaw, sehingga kamera dapat mempertahankan sudut pandang. Pengendalian gimbal ini biasanya dilakukan pada saat pengambilan gambar video maupun foto diudara dengan cara manual, yaitu gimbal diarahkan sesuai yang diinginkan dengan menggunakan remote control (pengendali). Sehingga pergerakan gimbal agak sedikit kasar dan terlalu beresiko bagi drone yang berada diudara.
Oleh karena itu, pada tugas akhir ini akan dibuat suatu sistem yang mampu mengendalikan arah gimbal 3-axis dengan menggunakan (gerak isyarat) gesture kepala dan dapat meningkatkan keamanan terbang. Sehingga pada saat bermanuver maju-mundur, naik-turun, kiri-kanan, ataupun saat posisi diam, sistem dapat mengambil gambar video maupun foto dengan stabil dan pergerakan yang lebih alamiah tanpa harus dikendalikan secara manual serta mengurangi resiko drone jatuh dari ketinggian terbang.
1.2 Permasalahan
Rumusan masalah yang akan dibahas tugas akhir ini adalah sebagai berikut: 1) Bagaimana merancang sistem kendali arah gimbal 3-axis menggunakan
gesture kepala pada drone ?
2) Bagaimana merancang sistem koneksi antara sensor sudut (accelerometer dan gyroscope) dengan gimbal ?
1.3 Batasan Masalah
1) Gimbal yang digunakan adalah Storm32 with 32Bit 3-Axis Brushless.
2) Tidak dilakukan pembahasan mendetail pada gimbal, karena gimbal yang digunakan adalah buatan pabrik. Tugas akhir ini hanya membatasi pada bagaimana cara memberi sinyal perintah kepada gimbal.
3) Sensor sudut yang digunakan adalah MPU6050 sebagai accelerometer untuk mengukur percepatan dan gyrocsope untuk mengukur atau mempertahankan orientasi.
4) Menggunakan 2 buah Arduino Pro Micro, dengan masing-masing fungsi sebagai mikrokontroler gimbal dan mikrokontroler sensor MPU6050.
5) Radio Telemetri berfungsi sebagai pengukuran jarak jauh dan pelaporan informasi kepada perancang atau operator sistem.
6) Jangkauan pergerakan gimbal dibatasi dari 40° sampai 140° pada sumbu Z (yaw), 60° sampai 150° pada sumbu Y (pitch), dan 40° sampai 140° pada sumbu X (roll).
1.4 Tujuan
Tujuan dari tugas akhir ini adalah:
1) Merancang sistem kendali arah gimbal pada drone dengan sensor sudut sebagai penggerak yaw (kanan-kiri), pitch (atas-bawah) dan roll (samping kiri-samping kanan), sesuai gesture kepala.
1.5 Manfaat yang Diperoleh
Berikut adalah manfaat yang diperoleh dari penelitian ini:
a. Membantu dan mempermudah dalam pengambilan gambar video maupun foto saat terbang.
b. Memberikan gerak alamiah pada gimbal 3-axis dengan menggunakan gesture kepala.
1.6 Sistematika Penulisan Laporan
Dalam suatu laporan perlu adanya sistematika penulisan yang baik dan gambaran masalah yang hendak dibicarakan. Pembahasan mengenai tugas akhir ini akan diuraikan dalam lima BAB, sebagai berikut:
BAB I PENDAHULUAN
Memuat penjelasan mengenai latar belakang, perumusan masalah, batasan masalah, tujuan, manfaat yang diperoleh dan sistematika penulisan laporan tugas akhir ini.
BAB II STUDI PUSTAKA
Pada bagian ini akan dipaparkan mengenai landasan teori yang menunjang penelitian.
BAB III METODE PENELITIAN
BAB IV HASIL AKHIR DAN ANALISIS
Bab ini akan menjelaskan hasil akhir dari pengerjaan tugas akhir yang memuat sistem kendali dari sensor sudut maupun sistem koneksi telemetri dengan gimbal sebagai penerapan sistem dan gesture kepala sebagai penggerak alamiah.
BAB V KESIMPULAN DAN SARAN
6 2.1 Gesture (Gerak Isyarat)
Liu Et Al (2008) menyatakan bahwa untuk menyampaikan informasi kepada orang lain, orang dapat melakukan dengan beberapa cara, salah satunya adalah dengan pergerakan fisik seperti gesture (gerak isyarat). Gesture adalah pergerakan dinamis dari bagian tubuh antara lain; tangan, lengan, kaki, kepala dan wajah. Gesture dianggap sebagai salah satu cara interaksi yang lebih natural karena secara alamiah gesture biasanya digunakan untuk menyampaikan informasi. Dengan pengenalan gesture manusia hanya perlu melakukan gerakan sederhana untuk mengoperasikan perangkat disekitarnya.
Gambar 2.1 Ilustrasi Gesture Kepala Yaw, Pitch, dan Roll
(Sumber: Rahmat Hidayat,dkk, Rancang Bangun Sistem Penstabil Kamera Untuk Foto Udara Berbasis Wahana Udara Quadcopter, 2014)
2.2 Camera Mount (Gimbal)
2.2.1 Storm32 with 32Bit 3-Axis Brushless
Storm32 adalah sebuah controller motor brushless dengan kualitas tinggi yang menawarkan sifat stabilisasi professional yang tak tertandingi di tingkat 32-bit. Board Storm32 dilengkapi dengan HC-06 bluetooth yang memungkinkan untuk memprogram board nirkabel tanpa tersambung dengan kabel. Storm32 memiliki mikroprosesor 32-bit yang beroperasi pada 72MHz dan memberikan kekuatan untuk perakitan gimbal. Dengan kombinasi antara 32-bit mikroprosesor dan firmware dapat membuat jangkauan yang luar biasa. Pada board output tersedia banyak pilihan konektivitas seperti, PWM, PPM, LED IR, Joystick, tombol, 7 port tambahan yang dapat digunakan sebagai input atau output untuk sinyal PWM/sinyal Sum-PPM. Storm32 juga mendukung koneksi dari berbagai receiver satelit termasuk Futaba S-Bus dan jenis spectrum. Catu daya yang dibutuhkan storm32 sebesar 9V-15V (3S-4S) dan menggunakan arus maksimal 1.5A.
Fitur dari storm32:
Struktur sederhana dan ringan, CNC perpaduan aluminium.
Memiliki peredam getar bola karet, sehingga mudah untuk menyesuaikan.
Kompatibel dengan GoPro 4, 3, 2, dan 1.
Controller dapat digunakan untuk membangun kualitas tinggi pada kamera 3 aksis, sehingga sistem penstabil kamera dapat dipasang untuk UAV.
Versi controller yang digunakan adalah jenis baru dalam pengembangan solusi penstabil kamera.
32-bit MCU – ARM Cortex M4
Memungkinkan kendali kamera menggunakan RC atau Joystick analog.
Menggunakan beberapa profil switchable untuk berbagai mode operasi.
Pengendalian pitch atau roll dengan PWM atau receiver, mendukung berbagai protocol RC:PWM, Sum-PPM, dan Spektrum S-Bus.
Menggunakan IMU1 dan pada board IMU2 memiliki modul sensor ganda, lock YAW yang akurat, dan kinerja yang stabil.
2.2.2 Motor DC (Brushless)
Motor listrik adalah sebuah perangkat elektromagnetis yang merubah energi listrik menjadi energi mekanik. Motor listrik diklasifikasikan menjadi dua, yaitu Motor AC dan Motor DC. Motor DC secara umum dapat dibagi menjadi dua macam, yaitu brushed DC motor dan brushless DC motor (BLDC). Pada umumnya gimbal menggunakan brushless motor sebagai alat penggerak kamera. Jenis motor ini menggunakan bahan semikonduktor untuk merubah maupun membalik arah putarannya untuk menggerakan motor, serta tingkat kebisingan motor ini relatif rendah karena putarannya yang halus. (Amarullah Zulkarnain, 2015)
Gambar 2.3 Brushless DC Motor (Sumber: http://ow.ly/KlTf303dGM6, 2016)
ditempatkan di slot. Stator motor ini hampir sama dengan motor induksi pada umumnya, namun lilitannya sedikit berbeda. Mayoritas brushless motor mempunyai tiga gulungan stator yang dihubungkan secara bintang. Masing-masing lilitan dibangun dengan banyak koil yang saling berhubungan. Gulungan stator ini terbagi menjadi dua jenis, yaitu bentuk trapesium dan motor sinusoidal. (Amarullah Zulkarnain, 2015)
Gambar 2.4 Bagian-bagian Brushless Motor (Sumber: http://ow.ly/H929303dHHn, 2016)
Brushless motor (BLDC) mempunyai beberapa kelebihan, antara lain:
1) Torsi lebih besar. Hal ini dikarenakan medan tarik yang dihasilkan oleh stator sepenuhnya diterima oleh rotor, karena rotor terbuat dari medan magnet yang permanen.
2) Putaran motor lebih halus atau polusi suara yang rendah sehingga tidak menimbulkan suara bising. Hal ini dikarenakan motor BLDC tidak memiliki brush yang bergesekan langsung dengan komutator yang menghasilkan suara.
3) Pendinginan motor yang lebih mudah. Kabel pada motor BLDC menempel pada casing, sehingga memudahkan sistem pendinginan. Hal ini merupakan salah satu alasan pemilihan motor BLDC untuk masa operasi yang panjang.
api. Dengan menggunakan motor BLDC, yang tidak adanya komutator dan brush menyebabkan tidak adanya percikan api yang ditimbulkan oleh motor.
2.3 Perangkat Pengendali Gimbal 3-Axis
Untuk mengendalikan gimbal menggunakan gesture kepala pada kondisi mengudara, diperlukan suatu sistem yang mampu membaca pergerakan kepala. Maka disusunlah suatu sistem pengendali yang mumpuni dan real time. Sistem tersebut tersususn oleh Sensor Sudut, Arduino Pro Micro, dan Radio Telemetry kit 3DR.
2.3.1 Sensor MPU-6050 (6 Axis GY-521)
Sensor MPU-6050 GY-521 (sensor sudut) adalah sebuah modul yang berbasis pada chip MPU6050 produksi perusahaan InvenSense. Chip ini terdiri dari dua buah sensor, yaitu accelerometer 3 axis dan gyroscope 3 axis yang menggunakan teknologi Micro Electro-Mechanical System (MEMS). MPU6050 ini adalah sensor deteksi gerakan pertama kali didunia yang menggunakan daya rendah, murah dan berkemampuan tinggi untuk tablet, smartphone dan perangkat lainnya. (Invensense, 2011)
Gambar 2.5 Sensor MPU-6050
MPU6050 selain memiliki kedua sensor tersebut, terdapat juga Digital Motion Processor (DMP) yang dapat memproses algoritma hingga 9 sumbu gerakan gabungan, dengan 3 sumbu gerakan tambahan oleh sensor magnetometer yang dikomunikasikan secara eksternal melalui protocol I²C. Kemampuan internal dari chip ini dapat dinonaktifkan oleh pengguna dan untuk memperoleh data pembacaan sensor, dapat secara langsung melalui protocol I²C dengan mencantumkan alamat register berupa hexadecimal yang tersedia. Nilai keluaran MPU6050 ini berupa nilai tegangan yang telah dikonveksi oleh Analog to Digital Converter (ADC) dengan resolusi 16 bit yang terdapat pada chip yang selanjutnya dikirim melalui I²C ketika perintah dipanggil. Fitur interrupt eksternal juga tersedia padad chip ini yang dapat digunakan apabila DMP diaktifkan. (Invensense, 2011)
Pada board sensor GY-521 ini memiliki rangkaian elektronik tambahan untuk menunjang chip sensor, supaya mudah untuk digunakan. Beberapa rangkaian yang tersedia adalah regulator tegangan 3,3 volt, tahanan pull-up pada pin SDA dan SCL. Berikut ini merupakan skema rangkaian pada board GY-521. (Invensense, 2011)
Accelerometer
Accelerometer adalah suatu sensor yang berfungsi untuk mengukur percepatan, mendeteksi dan mengukur getaran, mengukur percepatan gravitasi bumi, dan dapat juga digunakan untuk mendeteksi perubahan posisi pada suatu perangkat, serta menghitung nilai perubahannya. Prinsip kerja dari sensor ini adalah mendeteksi gaya yang dirasakan oleh sensor sehingga menyebabkan perubahan tegangan dan kapasitansi yang ada didalam MEMS. MEMS terdiri dari dua buah lempeng silikon yang mengapit sebuah lempeng polisilikon yang dapat bergetar sehingga mengubah nilai kapasitansinya. Sensor ini akan medeteksi gaya percepatan pada tiga sumbu, yaitu sumbu X, sumbu Y, dan sumbu Z berdasarkan pengaruh percepatan bumi. Percepatan dapat diukur dalam satuan SI, seperti meter per detik kuadrat (m/s² ), untuk percepatan gravitasi bumi diukur dalam satuan g-force (G) dimana 1G = 9,8m/s². Berikut ini adalah fitur yang disediakan oleh sensor MPU6050 untuk accelerometer:
a) Digital-output accelerometer 3 axis yang dapat diprogram penuh dengan rentang skala dari ±2g, ±4g, ±8g, dan ±16g.
b) Resolusi 16-bit ADC yang telah terintegrasi memungkinkan dalam pengambilan sampel secara simultan pada accelerometer, sedangkan tidak memerlukan multiplexer eksternal.
c) Pengoprasian normal accelerometer pada arus: 500μA .
d) Mode daya rendah accelerometer pada arus: 10μA pada 1.25Hz, 20μA pada 5Hz, 60μA pada 20Hz, 110μA pada 40Hz.
e) Mendeteksi orientasi dan sinyal. f) Mendeteksi ketukan.
i) Pengguna self-test. Gyroscope
Gyroscope adalah suatu sensor yang berfungsi untuk mengukur orientasi berdasarkan prinsip momentum sudut. Prinsip kerja dari sensor ini adalah mengukur gerak rotasi pada satu poros sumbu dan akan dihitung dalam satuan radian per detik (rad/s). Gerakan yang melingkar akan dirasakan oleh sensor berbasis MEMS yang berbentuk seperti piringan yang didalamnya terdapat sebuah bandul dengan pegas yang dapat bergetar sehingga ketika gaya rotasi dirasakan oleh sensor, maka akan menggeser posisi dari bandul tersebut. Berikut ini adalah fitur yang disediakan oleh sensor MPU6050 untuk gyroscope:
a) Digital-output X-, Y-, dan Z-Axis nilai sudut sensor (gyroscope) dengan suatu user-programmable full-rentang skala dari ±250, ±500, ±1000, dan ±2000˚/detik.
b) Sinyal sync eksternal yang terhubung dengan pin FSYNC mendukung gambar, video dan sinkronisasi GPS.
c) Resolusi 16-bit ADC yang telah terintegrasi memungkinkan untuk pengambilan sampel secara simultan dari gyros.
d) Peningkatan stabilitas bias dan sensitivitas suhu yang dapat mengurangi kebutuhan bagi pengguna kalibrasi.
e) Peningkatan kinerja noise frekuensi rendah. f) Digital-programmable low-pass filter. g) Gyroscope beroprasi pada arus: 3.6mA. h) Standby pada arus: 5μA.
Fitur Tambahan
Berikut ini adalah fitur yang disediakan oleh sensor MPU6050 untuk fitur tambahan:
a) Gerak perpaduan 9-Axis pada on-chip Digital Motion Processor (DMP).
b) Tambahan bus master I²C untuk membaca data dari sensor eksternal (e.g.,magnetometer).
c) 3.9mA adalah arus yang beroperasi ketika semua 6 sumbu sensor bergerak dan DMP diaktifkan.
d) VDD menyediakan tegangan kisaran dari 2.375V sampai 3.46V. e) Tegangan referensi VLOGIC cendrung fleksibel untuk mendukung
beberapa tegangan protocol antarmuka I²C (hanya MPU6050).
f) Paket QFN terkecil dan tertipis untuk perangkat portable: 4x4x0,9mm. g) Sensitivitas cross-axis minimal antara sumbu accelerometer dan
gyroscope.
h) 1024 byte FIFO akan menahan dan mengurangi konsumsi daya dengan membiarkan prosesor host untuk membaca data dalam pecahan dan kemudian akan masuk ke mode daya rendah serta MPU akan mengumpulkan lebih banyak lagi data.
i) Digital-output sensor suhu.
j) Filter digital user-programmable untuk gyroscope, accelerometer, dan sensor suhu.
k) 10.000g toleransi kejut.
2.3.2 Arduino Pro Micro (5V/16MHz)
Arduino Pro Micro adalah sebuah board mikrokontroler yang menggunakan ATMega32u4. Sama seperti Pro Mini, Arduino Pro Micro juga terbagi menjadi dua model yang berbeda, yaitu 3.3V dan 5V. Pada model 3.3V kristal osilator yang digunakan adalah 8MHz, sedangkan model 5V kristal yang digunakan adalah 16MHz. Arduino ini terdiri dari 12 pin digital input/output (5 diantaranya digunakan sebagai output PWM dan 4 diantaranya digunakan sebagai input analog), sebuah kristal osilator 8MHz atau 16MHz, serta perangkat keras untuk koneksi serial Rx dan Tx. Semua komponen penunjang mikrokontroler berada dalam satu board, sehingga mudah untuk digunakan dan dapat dihubungkan langsung dengan komputer melalui sebuah kabel micro USB to USB. Untuk dapat disuplai dengan sumber baterai, dibutuhkan sebuah rangkaian power supply dengan tegangan keluaran 5 volt yang sudah disetarakan. Di dalam arduino ini terdapat regulator tegangan, sehingga board dapat menerima tegangan masukan sampai 12VDC. (Sparkfun, 2016)
Spesifikasi Arduino Pro Micro sama seperti Arduino Leonardo, dimana menggunakan satu buah chip ATMega32u4 yang telah diprogram agar dapat berkomunikasi langsung dengan komputer melalui antarmuka USB. Oleh karena itu, keunggulan dari Arduino Pro Micro ini adalah proses pengiriman data atau buffer dari Arduino Pro Micro ke komputer lebih cepat dibandingkan dengan Arduino UNO. Bentuk board Arduino Micro dapat dilihat pada gambar 2.7 berikut:
Gambar 2.7 Arduino Pro Micro (Sumber: http://ow.ly/l5Jt303dIdF, 2016)
Gambar 2.8 Konfigurasi Pinout Arduino Pro Micro (Sumber: http://ow.ly/orNn303dIjV, 2016)
Berikut pin daya Arduino Pro Micro:
RAW adalah tegangan masukan yang tidak diatur oleh Arduino Pro Micro. Jika board terhubung melalui USB, maka tegangan pada pin ini akan menjadi sekitar 4.8V (masukan USB 5V dikurangi drop dioda schottky). Di sisi lain, jika board mendapatkan pasokan daya secara eksternal dengan melalui pin ini, maka tegangan yang akan digunakan bisa mencapai 12V.
VCC dapat digunakan sebagai output untuk memasok daya perangkat lain.
RST dapat digunakan untuk me-restart Arduino Pro Micro. Pin ini memiliki tahanan pull high sebesar 10KΩ; resistor yang terdapat pada board dan aktif-rendah, sehingga harus terhubung ke ground untuk melakukan reset. Arduino Pro Micro akan tetap dalam keadaan off hingga garis reset ditarik kembali ke posisi high.
GND tentu saja merupakan tegangan ground yaitu (referensi 0V) untuk sistem.
Gambar 2.9 ATMega32u4 Pin Diagram (Sumber: DataSheet ATMega32u4 Atmel, 2015)
2.3.3 Radio Telemetry Kit 3DR
Telemetry berasal dari bahasa Yunani, yakni: tele = jarah jauh, dan metron = pengukuran. Telemetri adalah proses pengukuran parameter suatu objek (benda, ruang, ataupun kondisi alam), yang hasil pengukurannya dikirimkan ke tempat lain melalui proses pengiriman data, baik menggunakan kabel maupun tanpa kabel (wireless). Pada sistem telemetri, semua informasi data diubah ke dalam bentuk informasi listrik dan diolah secara digital. Dengan demikian pada sistem ini semua transduser, sensor, dan detektor haruslah mempunyai keluaran yang berbentuk besaran elektris (arus atau tegangan listrik).
Gambar 2.10 Radio Telemetry Kit 3DR (Sumber: http://ow.ly/fZr0303dJjY, 2016)
fenomena refleksi, terutama pada hambatan dinding, struktur logam dan air. Operasi narrowband dari frekuensi 433MHz yang berada pada sub-GHz memungkinkan rentang jarak transmisi mencapai jarak dalam orde beberapa kilometer dengan kebutuhan daya yang relative kecil. Ditinjau dari konsumsi daya, frekuensi 433MHz hanya memerlukan energi lebih rendah setiap bitnya disbanding frekuensi yang lebih tinggi. Sistem 433MHz juga menggunakan antena yang berukuran lebih kecil dan memiliki atenuasi yang relatif lebih rendah dibandingkan dengan frekuensi lain. Spesifikasi modul telemetry kit 3DR dapat dilihat sebagai berikut:
Volume yang sangat kecil.
Frekuensi yang beroperasi dapat dipilih: 433MHz-915MHz. Dapat menerima sensitivitas: -121dBm.
Dibangun untuk memperbaiki kode yang mengalami kesalahan (dapat memperbaiki hingga 25% dari kesalahan data).
Jangkauan transmisi dapat mencapai beberapa mil jauhnya dengan menggunakan antena kecil omni-directional.
Menggunakan amplifier bilateral untuk mendapatkan cakupan yang lebih luas.
AT memiliki perintah untuk menyebarkan transmisi data.
Berdasarkan HM-modul wireless TRP, radio ini dilengkapi dengan Si1000 8051 mikrokontroler dan modul radio Si4432.
Radio ini memiliki master collocates dengan antena panjang dan slave collocates dengan antena pendek, sehingga dapat mengurangi beban pada pesawat.
2.4 Sistem Komunikasi
2.4.1 PWM (Pulse Width Modulation)
PWM (Pulse Width Modulation) adalah sebuah cara memanipulasi lebar sinyal yang dinyatakan dengan pulsa dalam suatu perioda, untuk mendapatkan tegangan rata-rata yang berbeda. Beberapa contoh aplikasi PWM, yaitu pemodulasi data untuk telekomunikasi, pengontrolan daya atau tegangan yang masuk ke beban, regulator tegangan, audio effect dan penguat, serta aplikasi-aplikasi lainnya. Aplikasi PWM berbasis mikrokontroler biasanya untuk pengendalian kecepatan motor DC, pengendalian motor servo dan pengaturan nyala terang suatu LED.
Gambar 2.11 Sinyal PWM
Sinyal PWM pada umumnya memiliki amplitude dan frekuensi dasar yang tetap, namun memiliki lebar pulsa yang bervariasi. Lebar pulsa PWM berbanding lurus dengan amplitude sinyal asli yang belum termodulasi. Artinya, sinyal PWM memiliki frekuensi gelombang yang tetap namun duty cycle bervariasi (antara 0% hingga 100%).
Gambar 2.12 Sinyal PWM dan Persamaan Vout PWM (Sumber: http://ini-robot.blogspot.com, 2016)
nilai dalam PWM tersebut. Contoh, suatu PWM memiliki resolusi 8-bit yang berarti PWM ini memiliki variasi perubahan nilai sebanyak = 256 variasi mulai 0-255 perubahan nilai yang mewakili duty cycle 0-100% dari keluaran PWM tersebut.
Gambar 2.13 Duty Cycle dan Resolusi PWM (Sumber: http://arduino.cc/en/Tutorial/PWM, 2016)
Dengan cara mengatur lebar pulsa “on”dan “off” dalam satu perioda gelombang melalui pemberian besar sinyal referensi output dari suatu PWM akan didapat duty cycle yang diinginkan. Duty cycle dari PWM dapat dinyatakan sebagai berikut:
Duty Cycle
tegangan 100V. Duty cycle 50%, maka tegangan pada motor hanya akan diberikan 50% dari total tegangan yang ada, begitu juga seterusnya.
Pengaplikasian komunikasi PWM yang sering dilakukan yaitu pada motor servo. Motor servo mampu bekerja dua arah yaitu CW (Clock Wise) dan CCW (Counter Clock Wise), dimana arah dan sudut pergerakan rotornya dapat dikendalikan dengan memberikan variasi lebar pulsa (duty cycle) sinyal PWM pada bagian pin kontrolnya. Motor servo yang sering digunakan yaitu standart 180°, dimana hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan-tengah-kiri adalah 180°.
Gambar 2.14 Pulsa Kendali Motor Servo
(Sumber: http://elektronika-dasar.web.id/motor-servo/, 2016)
2.4.2 I²C (Inter-Intergrated Circuit)
mencapai 400KHz berdasarkan pada datasheet ATMega32u4. Agar arduino dapat berkomunikasi dengan perangkat terintegrasi lainnya, maka dibutuhkan 4 jalur penghubung masing-masing adalah power supply, ground, SDA dan SCL.
Ketika arduino akan berkomunikasi dengan sensor melalui jalur komunikasi ini, maka harus dimulai dengan mengirimkan perintah start sequence. Perintah tersebut ialah salah satu dari dua perintah unik yang didefinisikan pada jalur komunikasi I²C, perintah unik yang lainnya, yaitu stop sequence. Kedua perintah tersebut digunakan saat jalur SDA diperbolehkan untuk berubah ketika jalur SCL bernilai high. Pada saat data sedang dikirim (SCL bernilai high), SDA harus tetap dalam keadaan stabil dan tidak berubah. Start dan stop sequences berfungsi sebagai penanda dimulai dan diakhirinya pertukaran data dari arduino dengan sensor. Keadaan perintah start sequence dan stop sequence ditunjukan oleh gambar – sebagai berikut:
Gambar 2.15 Start Sequence dan Stop Sequence (Sumber: http://ow.ly/AMFi303dNns, 2016)
sequence. Untuk setiap 8 bit data yang telah terkirim, perangkat sensor yang telah menerima data kemudian akan mengirim balik ACK (acknowledge) bit, jadi sebenarnya terdapat 9 pulsa pewaktu dalam pengiriman setiap 8 bit data. Jika perangkat sensor mengirim balik acknowledge bit rendah, maka perangkat pun telah menerima data dan siap untuk menerima lagi data yang lain selanjutnya. Jika yang dikirim kembali ialah acknowledge bit tinggi, maka menunjukkan bahwa perangkat sensor tidak dapat menerima data selanjutnya dan arduino harus menghentikan komunikasi dengan mengirim perintah stop sequence atau end transmission. Pada saat komunikasi antar perangkat berlangsung dalam sebuah jalur I²C bus, bit data dikirimkan pada saat jalur SCL dalam kondisi high dan pergantian bit data terjadi pada saat jalur SCL dalam kondisi low.
2.4.3 UART (Universal Asynchronous Receiver Transmitter)
bergantung pada nilai baud rate dengan satuan bit per second. Untuk mengetahui mengapa error dapat terjadi, maka terlebih dahulu mengetahui format data dari UART.
Gambar 2.16 Parameter Komunikasi UART (Sumber: http://ow.ly/jyRU303dNBa, 2016)
2.5 Arduino IDE (Integrated Development Environment)
Arduino IDE (Integrated Development Environment) adalah sebuah software (perangkat lunak) yang berfungsi untuk membuat, memodifikasi, dan melakukan perubahan pada program yang akan di download ke dalam Arduino, program tersebut berisi source code yang berfungsi dalam menjalankan perintah-perintah pada suatu sistem yang dibuat. Perintah yang diberikan akan dijalankan melalui input atau output pin pada Arduino, dimana pin tersebut memiliki berbagai macam fungsi yang disesuaikan dengan kebutuhan suatu sistem yang akan dijalankan. Arduino IDE merupakan suatu compiler yang menggunakan bahasa C dimana telah dimodifikasi, sehingga dapat memudahkan pengguna dalam melakukan proses pembuatan suatu source code. Selain itu, didalam Arduino IDE juga terdapat berbagai macam contoh program atau source code yang dapat diterapkan kedalam sistem yang sedang dibuat. Contoh program atau source code ini disebut library.
Arduino IDE juga memiliki fitur serial monitor, dimana fitur ini berfungsi untuk menampilkan data serial dari proses yang sedang berjalan pada Arduino. Fitur ini sangat berguna dalam melakukan proses trouble shooting pada source code yang sedang dibuat, sehingga apabila terdapat kesalahan didalam source code maka dapat dilihat dari data serial yang dikirimkan oleh Arduino ke komputer yang menampilkan proses program sedang berjalan pada Arduino. Selain itu, masih banyak lagi fitur yang terdapat pada Arduino IDE yang berfungsi untuk memudahkan pengguna dalam penggunaan software ini.
35
Pengumpulan Informasi
Analisis Informasi
Pembuatan Desain Alat
Perancangan & Pembuatan Alat
Pembuatan Program 3.1 Diagram Alir Penelitian
Diagram blok penelitian yang akan dilakukan dapat dilihat pada gambar berikut:
Gambar 3.1 Diagram Blok Alir Penelitian
Pengujian Per Blok Bagian
Pengujian Keseluruhan
YA TIDAK
Mulai
TIDAK
YA
3.1.1 Penjelasan Blok Diagram a) Mulai
Pada penelitian ini dimulai dengan perencanaan bentuk, tata letak pemasangan komponen dan sistem mekanik pada alat pengendali gimbal.
b) Pengumpulan Informasi
Pada tahap ini akan dilakukan pengumpulan data-data dan informasi dari buku maupun dari internet yang berkaitan dengan bahan dan berbagai komponen yang digunakan dalam alat.
c) Analisis Informasi
Tahap selanjutnya data-data dan informasi yang diperoleh dari buku maupun dari internet akan dilakukan proses analisis informasi yang berfungsi untuk menentukan bahan, bentuk, serta komponen yang digunakan dalam alat.
d) Pembuatan Desain Alat
Dalam tahap ini dilakukan pembuatan desain alat yang bertujuan untuk mengetahui gambar sesungguhnya dari alat yang akan dibuat dan mengetahui komponen-komponen yang saling terhubung.
e) Perancangan Alat
Setelah dilakukan pembuatan desain alat, bahan-bahan dan komponen-komponen yang telah terkumpul akan dilakukan proses perancangan alat sesuai dengan desain yang telah dibuat.
f) Pengujian Per Blok Rangkaian
g) Pembuatan Program
Setelah dilakukan pengujian per blok, maka akan dilakukan proses pembuatan program sehingga alat dapat bekerja sesuai dengan harapan yang diinginkan.
h) Pengujian Keseluruhan
Pengujian keseluruhan dilakukan setelah semua rangkaian digabungkan menjadi satu alat dan telah dilengkapi dengan sensor maupun alat pendukung, namun apabila masih terjadi kerusakan atau kegagalan sistem maka perlu dilakukan perbaikan program ataupun perancangan alat, sehingga alat dapat bekerja dengan baik.
i) Selesai
Tahap terakhir yaitu, berisikan hasil akhir yang diperoleh setelah penelitian selesai.
3.2 Rancangan
Gambar 3.2 Diagram Blok Keseluruhan Sistem Prinsip kerja diagram blok sistem adalah sebagai berikut:
1. Baterai lipo 2 sel berfungsi sebagai pencatu daya mikrokontroler dan komponen yang terletak dikepala.
4. Mikrokontroler berfungsi sebagai pengolah data yang diterima oleh sensor sudut yang kemudian data akan dikirim melalui telemetri 3DR (transmitter).
5. Baterai lipo 6 sel berfungsi sebagai pencatu daya gimbal dan komponen yang terletak pada drone.
6. Regulator LM2596 berfungsi sebagai penurun tegangan sumber untuk komponen.
7. Telemetri 3DR (receiver) akan menerima data yang selanjutnya diolah oleh mikrokontroler.
8. Mikrokontroler memberikan input kepada brushless motor gimbal, dimana brushless motor gimbal ini akan bekerja jika mikrokontroler memberikan nilai data berupa besaran sudut yang diperoleh dari sensor MPU6050 dimana nilai tersebut telah diolah sedemikian rupa dan ditransmisikan melalui sistem komunikasi PWM.
3.2.1 Skenario Perancangan
Gambar 3.3 Skenario Perancangan Head Unit dan Gimbal
3DOF pada sensor sudut yang terletak di head unit untuk sumbu X akan mengendalikan motor 2 yaitu pergerakan roll, untuk sumbu Y akan mengendalikan motor 3 yaitu pergerakan pitch, dan sumbu Z akan mengendalikan motor 1 yaitu pergerakan yaw. 3DOF pada sensor sudut saling berkaitan, dimana dapat mengendalikan gimbal sumbu X, Y, dan Z secara bergiliran.
3.2.2 Perancangan Sensor
Sistem perangkat yang digunakan untuk pengendali gimbal 3-axis ini menggunakan sensor sudut MPU-6050 (6 Axis GY-521) dan kontroler yang berfungsi untuk mengolah data yang diperoleh dari sensor tersebut.
3.2.2.1Perancangan Sensor MPU-6050 (6 Axis GY-521)
Gambar 3.4 Pin yang Digunakan Pada MPU6050 (Sumber: http://ow.ly/Vy2t303dWZY, 2016)
Modul sensor ini terdiri dari komponen tambahan yaitu, regulator tegangan 3.3 volt beserta komponen penunjang sebagai suplai daya MPU6050, dua buah komponen tahanan pullup pada pin SDA dan SCL, dan 8 buah pin eksternal sebagai penghubung antara MPU6050 dengan mikrokontroler. Modul sensor ini dihubungkan ke shield board Arduino Pro Micro dengan kabel 5 jalur masing-masing ialah VCC, GND, SDA, SCL, dan INT. Kabel penghubung mengunakan kabel pelangi yang diberi soket hitam, agar nantinya mudah untuk dipasang pada shield board.
Gambar 3.5 Skema Rangkaian MPU-6050 Ke Arduino Pro Micro
3.2.3 Perancangan Modul Telemetry Kit 3DR
Dalam perancangan alat ini, penulis menggunakan komponen modul telemetry kit 3DR karena dalam penerapannya, alat ini membutuhkan media pengiriman data antar mikrokontroler. Telemetri yang digunakan berjumlah dua buah, dengan masing-masing fungsi sebagai transmitter (pengirim) dan receiver (penerima). Beberapa hal yang mendasari digunakannya modul telemetry kit 3DR ini adalah sebagai berikut:
1. Ukuran modul relatif kecil: 17 x 69mm (tanpa antena). 2. Berat modul: 16.8g.
3. Bekerja pada frekuensi 433MHz.
4. Daya transmisi hingga 20dBm (100mW). 5. Kecepatan transfer data hingga 250Kbps. 6. Dapat memperbaiki kesalahan data hingga 25%.
Gambar 3.6 Modul Telemetry Kit 3DR
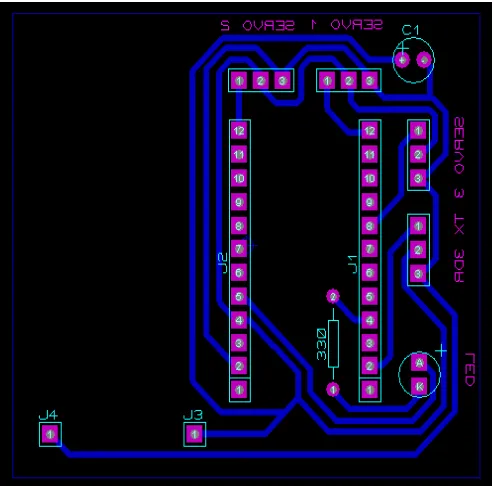
3.2.4 Perancangan Shield Board Rangkaian Kontroler
Shield board (papan PCB) adalah sebuah papan PCB yang dibuat khusus agar sebuah modul mikrokontroler dapat berhubungan dengan sistem yang sedang dikontrol serta menunjang kinerja yang lebih baik. Pada alat ini dibuat shield board khusus Arduino Pro Micro yang berfungsi untuk menghubungkan pin I/O dengan perangkat sensor yang digunakan serta komponen penunjang. Dalam merancang sebuah shield board diusahakan menggunakan rangkaian yang sekecil dan seringkas mungkin dengan pembuatan yang rapi. Shield board yang dibuat berjumlah 2 buah diantaranya adalah:
1. Shield board yang digunakan untuk head unit.
ditancapkan pada pin header male/female yang telah disediakan diatasnya. Pin header yang digunakan bertujuan untuk memudahkan pada saat terjadi trouble shooting dengan melepaskan komponen dari shield board. Pada skema shield board ini disediakan keluaran untuk menghubungkan sensor MHC588L, hal ini dilakukan untuk berjaga-jaga apabila membutuhkan tambahan sensor tersebut. Peran utama Arduino Pro Micro ini adalah sebagai otak dari rangkaian shield board, dimana komponen ini bertugas sebagai penerima data dari sensor MPU-6050 dan HMC588L melalui PORTD.0 dan PORTD.1. Sedangkan pada media pengiriman data ke shield board gimbal 3-axis menggunakan modul telemetry kit 3DR (TX) melalui PORTD.3. Selanjutnya adalah input tegangan 5 volt yang berasal dari mini regulator DC-DC dihubung seri dengan induktor 100µH dan di paralel dengan kapasitor keramik 100nF.
2. Shield board yang digunakan untuk gimbal 3-axis.
Skema shield board yang kedua ini memiliki fungsi yang sama dengan shield board sebelumnya dan sama-sama menggunakan Arduino Pro Micro. Shield board ini juga menghubungkan berbagai macam komponen dengan ditancapkan pada pin header male/female yang telah disediakan diatasnya. Pin header yang digunakan juga bertujuan untuk memudahkan pada saat terjadi trouble shooting dengan melepaskan komponen dari shield board. Peran utama Arduino Pro Micro sama seperti sebelumnya yaitu sebagai otak dari rangkaian shield board dimana komponen ini bertugas sebagai penerima data untuk menggerakkan gimbal 3-axis melalui PORTB.5, PORTB.6, dan PORTC.6. Sedangkan pada media penerimaan data dari shield board head unit menggunakan modul telemetry kit 3DR (RX) melalui PORTD.2. Selanjutnya adalah input tegangan 5 volt yang berasal dari regulator LM2596 dihubungkan dengan kapasitor elco 100µF yang berfungsi untuk meratakan tegangan sehingga terhindar dari drop tegangan. Pada rangkaian ini juga menggunakan indikator LED melalui PORTF.4 yang dihubung seri dengan resistor 330 ohm.
masing-masing panjang 5 cm dan lebar 5,7 cm. Setelah tahap pembuatan desain selesai, penulis menyiapkan bahan yang akan digunakan dalam proses pembuatan shield board.
Papan PCB dipotong terlebih dahulu sesuai dengan ukuran yang telah di desain. Selanjutnya mencetak layout PCB dalam kertas art paper menggunakan printer laser. Teknik pembuatan jalur PCB yang telah diterapkan ini adalah teknik transfer paper, dimana teknik ini adalah salah satu cara pembuatan jalur PCB yang relatif murah tetapi tetap berkualitas. Hasil print tersebut lalu diletakkan dan ditekan pada permukaan papan PCB untuk dipanaskan menggunakan mesin setrika listrik atau laminating, sehingga jalur yang telah di print pada art paper berpindah seutuhnya ke papan PCB. Setelah itu, rendam PCB dan kertas art paper pada air dingin sampai air meresap kedalam kertas yang menyebabkan kertas terlepas dengan sendirinya.
Gambar 3.9 Desain Jalur Shield Board Untuk Head unit Pada PROTEUS ARES
Gambar 3.11 Proses Pemindahan Layout Jalur Ke Shield Board
Gambar 3.13 Proses Pengeboran Shield Board
3.2.5 Perancangan Perangkat Lunak (Software)
Perancangan perangkat lunak (software) digunakan sebagai kumpulan perintah agar mikrokontroler dapat bekerja sesuai dengan program yang dibuat. Untuk melakukan pemrograman pada Arduino Pro Micro digunakan sebuah Interface Development Environment (IDE) yang khusus untuk Arduino. Pada perangkat lunak yang berbasis JAVA ini memiliki fasilitas pendukung seperti contoh-contoh kode program, compiler khusus yang disesuaikan dengan perangkat keras Arduino yang sedang aktif, dan serial monitor sebagai penampil hasil program yang sedang berjalan pada mikrokontroler yang berupa angka dan huruf.
Software IDE ini menggunakan bahasa pemrograman C yang telah dimodifikasi sehingga memudahkan dalam pengetikan kode program. Selain itu juga terdapat library program yang sudah tersedia sehingga dapat digunakan sewaktu-waktu. Diagram alir (flowchart) sistem yang akan dirancang adalah prinsip kerja sistem secara keseluruhan. Berikut adalah flowchart prinsip kerja sistem secara keseluruhan.
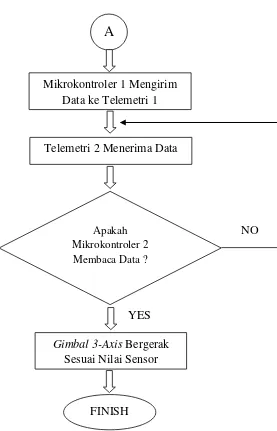
Gambar 3.15 Flowchart Prinsip Kerja Sistem Software Secara Keseluruhan
Dari flowchart diatas dapat dilihat bahwa pada saat sistem dijalankan, sensor MPU6050 membaca nilai pergerakan sudut sumbu X, sumbu Y, dan sumbu Z yang telah dikalibrasi. Data dari pembacaan sensor akan diolah dan diberi perintah pada mikrokontroler 1 yang diletakkan pada head unit. Program akan memerintahkan gimbal untuk dapat bergerak mengikuti gesture
A
Apakah Mikrokontroler 2 Membaca Data ?
NO
YES Gimbal 3-Axis Bergerak
Sesuai Nilai Sensor
FINISH
Mikrokontroler 1 Mengirim Data ke Telemetri 1
kepala pada sumbu Z (yaw) dengan pergerakan minimal 40° - maksimal 140°, sumbu Y (pitch) dengan pergerakan minimal 60° - maksimal 150°, dan sumbu X (roll) dengan pergerakan minimal 40° - maksimal 140°. Jika terjadi error dalam mengolah data pada mikrokontroler 1, maka sistem akan kembali lagi pada tahap pembacaan nilai sensor sudut, dan jika dalam proses pengolahan data tidak terjadi error, maka data hasil olahan akan dikirim oleh telemetri 1 yang terletak pada head unit.
Telemetri 2 yang terletak pada gimbal menerima data yang telah dikirim oleh telemetri 1. Selanjutnya mikrokontroler 2 yang diletakkan pada gimbal akan membaca data yang telah diterima. Program memerintahkan gimbal untuk kembali pada posisi awal (90°) ketika, telemetri 2 kehilangan sinyal terhadap telemetri 1. Sehingga mikrokontroler 2 tidak dapat membaca nilai sudut MPU6050 yang telah diolah, maka sistem akan kembali pada tahap pengiriman data dari telemetri 1. Jika data terbaca oleh mikrokontroler 2, maka gimbal akan bergerak sesuai dengan nilai sudut minimal – maksimal yang telah ditentukan pada sumbu X, Y, dan Z dengan data sensor sudut yang telah diolah.
3.2.6 Perancangan Akhir dan Penempatan Komponen
1. Rangkaian mikrokontroler 1 pada head unit.
Kerangka yang digunakan rangkaian mikrokontroler 1 ini adalah head unit yang banyak dijual dipasaran. Dipilihnya head unit karena, menurut penulis benda yang dapat digunakan di kepala dengan casing yang dapat dimanfaatkan dan menarik adalah head unit. Rangkaian mikrokontroler 1 diletakkan dalam body bagian kiri dari head unit, hal ini bertujuan untuk melindungi rangkaian agar terhindar dari gangguan noise dari luar. Baterai lithium 2 sel diletakkan dalam body bagian kanan dari head unit, yang bertujuan untuk memberi kesan rapi pada alat ini. Pada head unit bagian atas diletakkan sensor sudut (MPU6050), karena sensor ini akan bekerja sesuai dengan gesture kepala, maka penempatannya harus sejajar dengan kepala. Pada head unit bagian kiri terdapat juga modul telemetry kit 3DR (transmitter) dan tombol on-off yang diletakkan pada luar casing. Hal ini bertujuan agar pada saat telemetri 1 bekerja, frekuensi tidak terganggu dan tombol mempermudah untuk melakukan reset. Berikut ini adalah gambar design 3D dari shield board mikrokontroler 1 pada head unit.
Gambar 3.17 Head unit Tampak Atas
Gambar 3.18 Head unit Tampak Kanan
2. Rangkaian mikrokontroler 2 pada gimbal 3-axis.
Pada bagian ini, rangkaian mikrokontroler 2 diletakkan diatas gimbal 3-axis tanpa menggunakan casing. Hal ini bertujuan untuk mengurangi beban yang terdapat pada drone dan lebih simpel. Telemetry kit 3DR (receiver) diletakkan juga diatas gimbal atau drone, karena pada saat telemetri 2 bekerja frekuensi tidak terganggu dengan adanya casing. Berikut ini adalah gambar design 3D dari shield board mikrokontroler 2 pada gimbal 3-axis.
Gambar 3.20 Gimbal 3-Axis Tampak Depan
Gambar 3.22 Gimbal 3-Axis Tampak Kanan
Gambar 3.23 Gimbal 3-Axis Tampak Kiri Dari perancangan akhir diatas, dapat dilihat bahwa penempatan komponen penggerak gimbal 3-axis dibagi menjadi dua bagian. Komponen penggerak dikemas dengan bentuk yang minimalis dan menarik, karena alat yang baik adalah alat yang dapat bekerja sesuai tujuan dengan hasil
58 BAB IV
PENGUJIAN DAN ANALISIS SISTEM
4.1 Analisis dan Pengujian
Analisis merupakan hal penting yang harus dilakukan untuk mengetahui bagaimana hasil dari sistem yang telah dibuat dapat berjalan sesuai yang diinginkan atau tidak. Hasil-hasil tersebut dapat dilihat dari pencapaian selama pengujian berlangsung. Selain itu, pengujian dilakukan untuk mengetahui kelebihan dan kekurangan dari sistem ini. Pengujian pada awalnya dilakukan secara per blok bagian, yang kemudian dilakukan secara keseluruhan sistem yang paling terintegerasi.
4.2 Data Pengujian
Setelah menyusun perancangan untuk mendapatkan kinerja yang diinginkan sesuai dengan teori, maka dilakukan pengujian untuk mengetahui seberapa besar hasil yang didapat. Table 4.1 adalah hasil pengukuran tegangan pada setiap perangkat yang digunakan. Nilai-nilai yang didapat adalah nilai-nilai yang paling banyak muncul pada alat ukur (multimeter). Gimbal Storm 32 (9V-15V) 9,5 Volt
Regulator LM2596 5 Volt
Dari data diatas, dapat dilihat bahwa nilai tegangan sudah cukup untuk menjalankan perangkat pengendali gimbal, sehingga sistem dapat dijalankan dengan baik.
4.2.1 Pengujian Sensor Sudut (MPU-6050)
Pengujian ini dilakukan untuk mengetahui nilai yang diukur oleh sensor MPU6050 sehingga dapat mengetahui nilai real yang terukur dibandingkan dengan nilai busur derajat yang diukur. Banyaknya pengujian yang dilakukan adalah enam kali, karena dengan melakukan enam kali pengujian dapat mewakili isi keseluruhan data. Pengujian sensor MPU6050 ini menggunakan catu daya sebesar 3,3V yang telah diturunkan tegangannya oleh regulator pada MPU6050 dari board Arduino 5V. sedangkan pengiriman data menggunakan pin SDA dan SCL pada board Arduino. Nilai yang diukur sensor ini dibagi dalam 3 jenis, yaitu :
1. Nilai Yaw
Berikut ini adalah gambar alat pengujian sensor MPU6050 untuk nilai yaw dibandingkan dengan nilai busur derajat yang terukur.
Bandul
Dalam pengujian ini, sudut yang diuji adalah dari sudut 30° sampai 160° dengan skala kenaikan per 10°. Berikut adalah hasil pengujian nilai yaw sensor sudut (MPU6050).
Tabel 4.2 Tabel Pengujian Nilai Yaw Sensor MPU6050
Tabel Pengujian Nilai Yaw sensor MPU6050
Total Nilai Error Pengujian Data 2,7%
pengujian yang dilakukan dapat diketahui nilai rata-rata dan nilai error dari sensor MPU6050. Rumus untuk mencari nilai rata-rata adalah sebagai berikut:
Rumus untuk mencari nilai error adalah sebagai berikut:
| |
Berikut adalah perhitungan nilai rata-rata dan nilai error dari sensor MPU6050 pada sumbu Z (yaw).
Pada Sudut 30°
= 33,1°
| |
= 10,3% Pada Sudut 40°
| |
= 7,2%
Pada Sudut 50°
= 52,8°
| |
= 5,6%
Pada Sudut 60°
= 60,6°
| |
= 1% Pada Sudut 70°
| |
= 0,8%
Pada Sudut 80°
=80°
| |
= 0%
Pada Sudut 90°
=89,9°
| |
= 0,1% Pada Sudut 100°
| |
= 0,1%
Pada Sudut 110°
=109,5°
| |
= 0,4%
Pada Sudut 120°
=118,9°
| |
= 0,9% Pada Sudut 130°
| |
= 2,4%
Pada Sudut 140°
=135,9°
| |
= 2,9%
Pada Sudut 150°
=144,4°
|
|
= 3,7% Pada Sudut 160°
| |
= 3,9%
Dari data diatas, dapat dihitung nilai error rata-rata pengujian, berikut adalah perhitungan nilai error rata-rata.
= 2,8%
Dari hasil pengujian sensor MPU6050 untuk nilai Yaw, dapat diketahui bahwa nilai error rata-rata adalah 2,8%. Hal tersebut dikarenakan nilai sensor pada sumbu Z (yaw) selalu berubah-ubah tidak stabil dan sangat sensitif. Nilai yang diperoleh dari sensor dijadikan perbandingan dengan nilai busur derajat, karena nilai busur derajat adalah akurat 100% sehingga digunakan sebagai nilai acuan. Dengan demikian, sensor sudah bekerja dengan baik walaupun tidak akurat 100%, dan dapat dijadikan sebagai pengatur gerak gimbal sumbu Z (yaw).
Berikut adalah grafik perbandingan nilai sensor MPU6050 pada sumbu Z (yaw) dengan nilai busur derajat.
Gambar 4.2 Grafik Perbandingan Nilai Sensor MPU6050 (Yaw) yang Diukur Dengan Nilai Busur Derajat Terukur
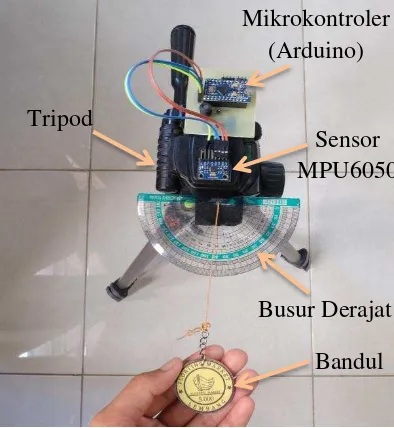
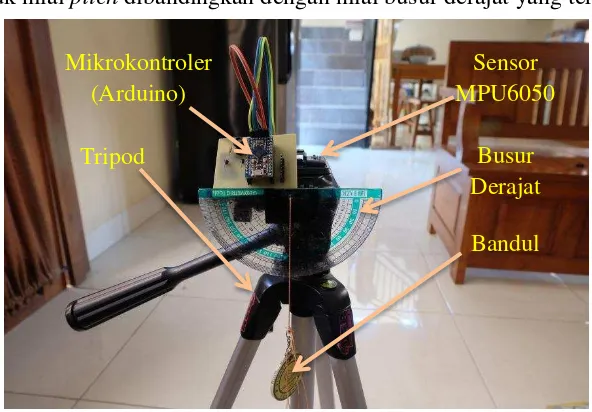
2. Nilai Pitch
Berikut ini adalah gambar alat pengujian sensor MPU6050 untuk nilai pitch dibandingkan dengan nilai busur derajat yang terukur.
0
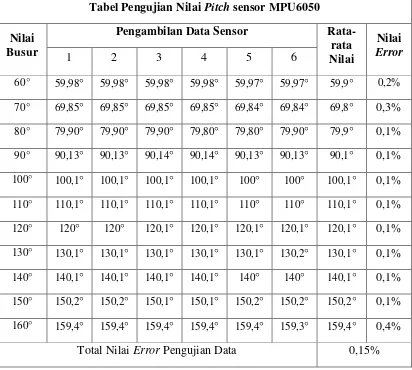
Dalam pengujian ini, sudut yang diuji adalah dari sudut 60° sampai 160° dengan skala kenaikan per 10°. Berikut adalah hasil pengujian nilai pitch sensor MPU6050.
Tabel 4.3 Tabel Pengujian Nilai Pitch Sensor MPU6050
Tabel Pengujian Nilai Pitch sensor MPU6050
Total Nilai Error Pengujian Data 0,15%
nilai error dari sensor MPU6050. Rumus untuk mencari nilai rata-rata adalah sebagai berikut:
Rumus untuk mencari nilai error adalah sebagai berikut:
| |
Berikut adalah perhitungan nilai rata-rata dan nilai error dari sensor MPU6050 pada sumbu Y (pitch).
Pada Sudut 60°
=59,9°
| |
= 0,2%
Pada Sudut 70°
| |
= 0,3% Pada Sudut 80°
=79,9°
| |
= 0,1%
Pada Sudut 90°
=90,13°
| |
= 0,1%
Pada Sudut 100°
| |
= 0,1% Pada Sudut 110°
=110,1°
| |
= 0,1%
Pada Sudut 120°
=120,1°
| |
= 0,1%
Pada Sudut 130°
| |
= 0,1% Pada Sudut 140°
=140,1°
| |
= 0,1%
Pada Sudut 150°
=150,2°
| |
= 0,1%
Pada Sudut 160°
| |
= 0,4%
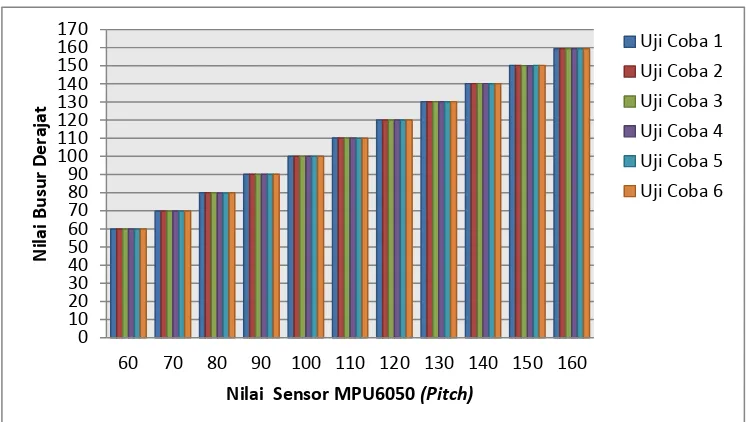
Dari data diatas, dapat dihitung nilai error rata-rata pengujian, berikut adalah perhitungan nilai error rata-rata. diperoleh dari sensor dijadikan perbandingan dengan nilai busur derajat, karena nilai busur derajat adalah akurat 100% sehingga digunakan sebagai nilai acuan. Dengan demikian, sensor sudah bekerja dengan sangat baik, sehingga nilai yang dihasilkan hampir akurat 100% dengan nilai error mendekati 0% dan dapat dijadikan sebagai pengatur gerak gimbal sumbu Y (pitch).
Gambar 4.4 Grafik Perbandingan Nilai Sensor MPU6050 (Pitch) yang Diukur Dengan Nilai Busur Derajat Terukur
3. Nilai Roll
Berikut ini adalah gambar alat pengujian sensor MPU6050 untuk nilai roll dibandingkan dengan nilai busur derajat yang terukur.
0
Dalam pengujian ini, sudut yang diuji adalah dari sudut 40° sampai 160° dengan skala kenaikan per 10°. Berikut adalah hasil pengujian nilai roll sensor MPU6050.
Tabel 4.4 Tabel Pengujian Nilai Roll Sensor MPU6050
Tabel Pengujian Nilai Roll sensor MPU6050
Total Nilai Error Pengujian Data 0,15%
nilai error dari sensor MPU6050. Rumus untuk mencari nilai rata-rata adalah sebagai berikut:
Rumus untuk mencari nilai error adalah sebagai berikut:
| |
Berikut adalah perhitungan nilai rata-rata dan nilai error dari sensor MPU6050 pada sumbu X (roll).
Pada Sudut 40°
=39,8°
|
|
= 0,5%
Pada Sudut 50°
| |
= 0,2%
Pada Sudut 60°
=59,9°
| |
= 0,2%
Pada Sudut 70°
=69,9°
| |
= 0,1% Pada Sudut 80°
| |
= 0,1%
Pada Sudut 90°
=90,3°
| |
= 0,3%
Pada Sudut 100°
=100°
| |
= 0% Pada Sudut 110°
| |
= 0,1%
Pada Sudut 120°
=120,1°
| |
= 0,1%
Pada Sudut 130°
=130,1°
| |
= 0,1% Pada Sudut 140°