PERANCANGAN SIMULASI KENDALI PUTARAN
PENGADUK DAN BESARAN API PADA ALAT PENGADUK
DODOL MENGGUNAKAN RANGKAIAN DIGITAL
SKRIPSI
LINTANG PRATAMA
DEPARTEMEN TEKNOLOGI PERTANIAN
FAKULTAS PERTANIAN
PERANCANGAN SIMULASI KENDALI PUTARAN
PENGADUK DAN BESARAN API PADA ALAT PENGADUK
DODOL MENGGUNAKAN RANGKAIAN DIGITAL
SKRIPSI
Lintang Pratama
040308002/TEKNIK PERTANIAN
DEPARTEMEN TEKNOLOGI PERTANIAN
FAKULTAS PERTANIAN
Perancangan Simulasi Kendali Putaran Pengaduk Dan Besaran
Api Pada Alat Pengaduk Dodol Menggunakan Rangkaian Digital
SKRIPSI
Oleh :
LINTANG PRATAMA
040308002/ TEKNIK PERTANIAN
Skripsi sebagai salah satu syarat untuk dapat melaksanakan Penelitian di Departemen Teknologi Pertanian Fakultas Pertanian Universitas Sumatra
Utara
Disetujui oleh : Komisi Pembimbing
(Taufik Rizaldi, STP, MP.) Ketua
(Ir. Saipul Bahri Daulay, M.Si.) Anggota
DEPARTEMEN TEKNOLOGI PERTANIAN
FAKULTAS PERTANIAN
UNIVERSITAS SUMATRA UTARA
2 0 1 0
LINTANG PRATAMA. Perancangan Simulasi Kendali Putaran Pengaduk dan Besaran Api Pada Alat Pengaduk Dodol Menggunakan Rangkaian Digital; Dibimbing Oleh Taufik Rizaldi, STP., MP dan Ir. Saipul Bahri Daulay, M.Si.
Pemanfaatan rekayasa teknologi pada bidang kerakyatan terbilang masih sedikit. Padahal sektor ini adalah sektor terdekat yang menyentuh langsung kehidupan perekonomian rakyat yang menjadi tulang punggung kemandirian. Dodol sebagai salah satu komoditas unggulan, menjadi panganan yang mampu memberi tidak hanya pemasukan bulanan, namun menyerap tenaga kerja. Oleh karena itu, dirancanglah sebuah simulasi pengaturan kecepatan dan bukaan gas dengan maksud mengoptimalkan alat yang sudah ada agar mampu menghasilkan dodol yang baik dengan efisiensi dan efektifitas tinggi. Perancangan simulasi dimaksudkan agar meminimalisir kesalahan pada tahap pengembangan sistem fisik. Dari hasil penelitian didapat bahwa kendali putaran pengaduk dan besaran api dapat dikendalikan dengan rangkaian digital. Sebuah IC Counter 74LS93 menggantikan fungsi gir pembanding pada rangkaian analog. Dengan menggunakan rangkaian digital yang cukup menggunakan arus lemah, konsumsi listrik dapat ditekan, karena arus lemah dapat mengontrol arus kuat.
Kata Kunci : Integrated Circuit, Arus Searah (DC), Rangkaian Digital, Counter.
ABSTRACT
LINTANG PRATAMA. The simulation programming of Mixer Valve Control and
Fire Level On the Valve Equipment of Dodol Using Digital Series;
Under Supervision of Mr. Taufik Rizaldi, STP, MP and Mr. Ir. Saipul Bahri Daulay, M.Si.
The technology engineering utilization in the public sector was still low. Even this sector is the closest one affecting people economy-life directly and become self-sufficiency symbol. Dodol as one of the prime commodity, an also it as culinary food that giving monthly income and absorbed labors. Therefore, a speed and gas regulation simulation invented in order to optimize the existed equipments to produce high quality of Dodol with high efficiency and affectivity. The simulation was to minimize the faults in physical development phase. It was showed that the valve and fire level could be controlled with digital series. IC Counter 74LS93 was put replace the assessor gear function on the analog series. Digital series using low flow could be reduce electricity consumption, as the low flow might control the stronger one.
Keywords: Integrated Circuit, Direct Current (DC), Digital Series, Counter
L I N T A N G PR A T A M A , " P e r a nc a ng a n S imu la s i Ke nd a l l
P u t a r a n Pengaduk dan Besaran Api Pada Alat Pengaduk Dodol Menggunakan
Rangkaian Digital", dibimbing oleh Taufik Rizaldi sebagai Ketua dan Saipul Bahri Daulay sebagai anggota.
P e ne lit ia n in i be r ut u ju a n u nt u k me mbu at s e bu a h s is t e m s imu la s i terintegrasi pada alai pengaduk dodol agar didapat informasi akurat bagaimana seharusnya sistem fisik dikembangkan nantinya. Penelitian ini memanfaatkan rangkaian digital sebagai simulator dengan IC NE555 dan
Counter 74LS93 sebagai komponen utama.
Parameter yang diamati adalah kendali otomasi dari simulator pada proses pembuatan dodol dari penelitian dirangkumkan sebagai berikut :
Karakteristik Rangkaian Digital
Sebuah sinyal digital mampu mengatur penyaluran daya pada suatu sistem keseluruhan (analog-digital). Sinyal diskrit yang bernotasi "0" dan "1"
menjadi "bahasa" pemecahan masalah secara sekuensial pada rangkaian digital sesuai dengan nilai referensi yang dikehendaki. Oleh karena itu, nilai
referensi menjadi pokok utama dalam perencangan rangkaian digital karena merupakan tujuan yang ingin dicapai dari rangkaian itu sendiri.
Salah satu keunggulan rangkaian digital atau digitalisasi adalah
konsumsi energi listrik yang rendah jika dibandingkan dengan sistem analog yang berat dan kasar. Semakin lemah arcs yang digunakan, semakin balk.
Kendall Putaran Pengaduk
Berbasis rangkaian digital, pengendalian dilakukan dengan memanfaatkan se nso r optocoupler dan s wi tch relay. De nga n kedu a
ko mpo ne n t ersebut , pengendalian dimungkinkan sesuai dengan nilai referensi yang dikehendaki.
Kendall besaran api
Sedikit berbeda dengan kendali kecepatan, besaran api dikendalikan menggunakan op-amp 741 yang merupakan resistor yang nilainya dapat berubah.
Op-amp akan mencari nilai referensi dan berhenti jika nilai itu sudah tercapai. Dengan demikian valve dapat dibuka sesuai level yang dikehendaki.
Lintang Pratama dilahirkan di Sidoarjo pada tanggal 1 Maret 2010 dari
ayah Dedi Suherman dan Ibu Siagarini. Penulis merupakan anak sulung dari tiga bersaudara.
Tahun 2004 penulis lulus dari SMU Swasta Panca Budi Medan dan lulus seleksi masuk USU melalui jalur SPMB. Penulis memilih Program Studi Teknik Pertanian Departemen Teknologi Pertanian Fakultas Pertanian.
Selama perkuliahan penulis mengikuti organisasi IMATETA sebagai ketua seksi informasi pada perode 2007-2008.
Penulis melaksanakan Praktek Kerja Lapangan (PKL) di PTPN IV Pabrik Kelapa Sawit Dolok Sinumbah pada tahun 2007.
Puji dan syukur kepada Allah SWT yang telah memberikan rahmat ilmu
dan kesehatan, sehingga penulis dapat menyelesaikan skripsi ini. Adapun judul skripsi ini adalah “Perancangan Simulasi Kendali Putaran Pengaduk dan Besaran
Api pada Alat Pengaduk Dodol Menggunakan Rangkaian Digital”.
Ucapan terima kasih tulus saya berikan kepada Bapak Taufik Rizaldi, STP, MP. sebagai Ketua Komisi Pembimbing dan
Bapak Ir. Saipul Bahri Daulay, M.Si. sebagai Anggota Komisi Pembimbing atas arahan dan bimbingan juga dukungan yang diberikan sejak pertama penulis
menjadi mahasiswa, hingga penyelesaian skripsi ini. Ucapan terima kasih khusus kepada Ayahanda Dedi Suherman dan Ibunda Siagarini yang sangat sabar memberi semangat, doa, perhatian dan menjadi motivasi utama. Adik-adikku
tersayang, Fanny dan Aina.
Terima kasih kepada mentor saya, Abang Kamarul Abidin beserta istri,
yang telah mengajarkan saya ilmu elektronika dengan sabar dan ikhlas. Ibu Ainun Rohanah, STP. MSi., selaku penanggung jawab akademik, beserta
seluruh staf pengajar dan pegawai Departemen Teknologi Pertanian. Senior saya,
Lijado Ginting, STP. atas kerelaannya memberi kesempatan kepada saya untuk meneliti alat yang dibuatnya. Sahabat setia, Sri Fitriati, S.Kom. Sahabat terbaik
Penulis menyadari penulisan skripsi ini masih jauh dari baik. Segala
kebenaran berasal dari Yang Maha Kuasa, mohon maaf jika terdapat kesalahan dalam penulisan skripsi ini. Semoga skripsi ini bermanfaat.
Medan, Juni 2010
DAFTAR ISI
Hal
ABSTRAKS... i
RINGKASAN PENELITIAN... ii
RIWAYAT HIDUP... iv
KATA PENGANTAR... v
DAFTAR TABEL... ix
DAFTAR GAMBAR... x
DAFTAR LAMPIRAN... xii
PENDAHULUAN... 1
Latar Belakang... 1
Tujuan Penelitian... 3
Manfaat Penelitian... 3
Hipotesis Penelitian... 3
TINJAUAN PUSTAKA... 4
Sistem Digital... 4
Rangkaian Digital... 4
Perbedaan Rangkaian Digital dan Sistem Digital... 5
Integrated Circuit (IC)... 5
Bit (Binary Digit)... 6
Byte (bita)... 6
Trigger NE555... 7
Flip-Flop... 7
Rangkaian Pencacah... 9
Penguat Op-amp... 10
Aljabar Boole dan Bilangan Biner... 11
Gerbang Logika... 13
Gerbang AND... 13
Gerbang NAND... 14
Gerbang OR... 14
Gerbang NOR... 14
Gerbang NOT... 14
Gerbang XOR... 15
Gerbang Kombinasi... 15
Simulasi... 18
Arus Bolak-Balik (Alternating Current)... 18
Arus Searah (Direct Current)... 19
Transformator... 19
Dioda... 20
BAHAN DAN METODE PENELITIAN... 22
Lokasi dan Waktu Penelitian... 22
Bahan dan Alat Penelitian... 22
Metode Penelitian... 24
Kendali Besaran Api... 24
Kendali Kecepatan Putaran Pengaduk Dodol... 27
Prosedur Penelitian... 30
Pembuatan Power Supply... 30
Pembuatan Rangkaian Penghitung (Timer)... 30
Perancangan timer simulasi kendali putaran pengaduk... 30
Perancangan timer simulasi kendali besaran api... 32
Perancangan Rangkaian Pembagi... 32
Rangkaian Pembagi Putaran Motor... 32
Rangkaian Pembagi Bukaan Gas... 33
Parameter yang Diamati... 35
HASIL DAN PEMBAHASAN... 36
Cara Kerja Integrated Circuit (IC)... 36
NE555... 37
Fungsi Masing-Masing Pin... 37
Cara Kerja IC NE555... 38
TTL SN 74LS47 (BCD to seven segment decoder/ driver)... 39
LED Seven segment... 39
TTL SN 74LS93 (Decode Counter: divide by twelve counter 4-bit)... 40
TTL SN 74LS76 (Dual JK Flip-Flop with set-clear)... 40
TTL SN 74LS04 (Hex inverter)... 41
TTL SN 74LS08, 74LS21... 41
TTL SN 74LS32 (Quad 2-input Or Gates)... 42
TTL SN 74LS27 (Tripple Input Nor Gates)... 43
Optocouple 4n25... 44
Switch Relay... 45
Analisa Data... 55
KESIMPULAN DAN SARAN... 57
Kesimpulan... 57
Saran... 58
DAFTAR PUSTAKA... 59
DAFTAR TABEL
No. Hal
1. Representasi Besaran Digital... 12
2. Tabel Kebenaran Gerbang AND Tiga Masukan... 13
3. Tabel Kebenaran Gerbang NOT... 14
4. Karakteristik Keluaran Tiap Gerbang... 15
5. Ringkasan Jenis-Jenis Gerbang Logika... 16
6. Tabel Binari 4-bit... 17
7. Tabel Kebenaran Gerbang And Empat Masukan... 42
8. Tabel Kebenaran Gerbang Or Dua Masukan... 43
9. Tabel Kebenaran Gerbang Nor... 44
10. Data Logika High-Low pada Tiap Input-Output... 50
DAFTAR GAMBAR
No. Hal
1. Rangkaian Dasar Flip-Flop JK... 8
2. Flip-Flop JK jika Ditabuh... 8
3. Gambaran Pencacah Gelombang... 10
4. Lambang Penguat Op-Amp... 11
5. Bentuk Dasar Gelombang Sinyal Digital... 12
6. Gerbang AND Tiga Masukan... 13
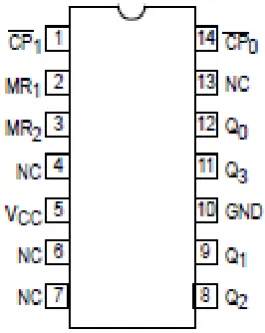
7. Susunan Pin IC SN 74LS93... 17
8. Bentuk Gelombang Arus Bolak-Balik... 19
9. Bagian-Bagian Transformator... 20
10. Rangkaian Penyearah Sederhana... 21
11. Proses Kendali Besaran Api... 26
12. Proses Kendali Putaran Pengaduk... 30
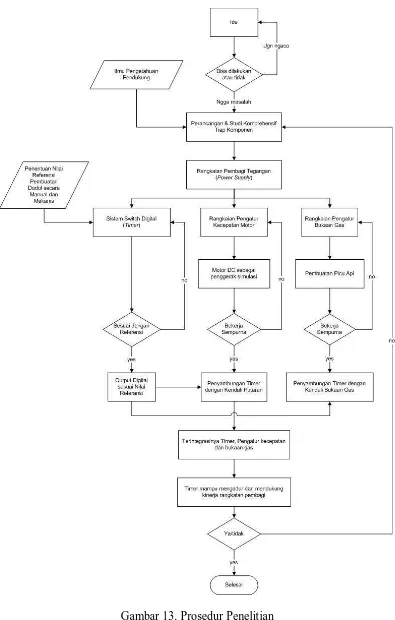
13. Prosedur Penelitian... 35
14. IC Gerbang And... 37
15. Konfigurasi NE555... 39
16. Gambar Pulsa Output... 39
17. Diagram Logis 74LS47... 40
18. LED Seven Segment... 40
19. Diagram Logis 74LS93... 41
20. Diagram Logis 74LS76... 41
21. Diagram Logis 74LS04... 42
22. Diagram Logis 74LS08... 43
23. Diagram Logis 74LS21... 43
24. Diagram Logis 74LS32... 44
25. Diagram logis 74LS27... 44
26. Optocupler... 45
27. Gambaran Kerja Relay... 47
28. Cara Kerja Sistem Switch pada Timer... 48
29. Simbol SCR... 49
30. Rangkaian Timer dan Switch digital... 69
31. Status Standby Timer... 70
32. Power Supply... 71
33. Diagram Rangkaian Power Supply CT 12V... 71
34. Diagram Rangkaian Power Supply +5V... 71
35. Rangkaian Pengatur Kecepatan Motor... 72
36. Rangkaian Pengatur Bukaan Gas... 72
37. Lambang-Lambang Dioda... 73
38. Lambang-Lambang Kapasitor... 73
39. Lambang-Lambang Gerbang Logika... 74
40. Lambang-Lambang Pengkabelan... 75
No. Hal
42. Lambang-Lambang Resistor... 76
43. Lambang-Lambang Pengukuran... 77
44. Lambang-Lambang Transistor... 77
DAFTAR LAMPIRAN
No. Hal
1. Hitungan Matematis Perbandingan Biaya Produksi Dodol
Secara Manual dan Mekanis... 62
2. Gambaran Kerja Sistem Pengaduk... 65
3. Penetapan Nilai Referensi... 66
4. Diagram Alir Penelitian... 67
5. Brainstroming Perancangan Sistem Kendali... 68
6. Dokumentasi Penelitian... 69
7. Datasheet Komponen-Komponen... 79
Latar Belakang
Sebagai makanan tradisional, dodol telah mampu membuat industri kecil menengah (IKM) berkembang pesat dan membangun ekonomi kerakyatan. Produksi dodol skala rumah tangga sudah lama dimulai di Sumatera Utara.
Terhitung sejak tahun 1975, para pendatang dari Tanjung Balai memperkenalkan dodol pada penduduk di Desa Bengkel, Serdang Bedagai yang sampai sekarang
telah berkembang menjadi ratusan industri kecil dan menengah. Lewat IKM inilah, kemandirian rakyat terbangun dan menyediakan lapangan kerja bagi ratusan angkatan kerja.
Namun, campur tangan teknologi pada industri dodol terbilang sangat minim. Proses produksinya hampir tidak berubah sejak pertama kali
diperkenalkan hingga saat ini. Keadaan ini menyulitkan para produsen dalam berekspansi. Keterbatasan umur dodol dan kuantitas produksi menjadi masalah utama dalam industri dodol. Ditambah sulitnya bahan baku dan mahalnya upah
tenaga kerja semakin menyulitkan produsen untuk mempertahankan usahanya.
Dengan adanya alat pengaduk dodol, diharapkan dapat mengurangi beban
produsen dalam hal upah tenaga kerja dan bahan bakar. Jika dalam satu hari, upah tenaga kerja adalah Rp 20.000,- ditambah biaya bahan bakar berupa kayu bakar yang jika dirupiahkan sebesar Rp 1.200,- yang artinya dalam sekali produksi
biaya rata-rata bahan bakar dan pengadukan untuk sekali produksi dodol berkisar
antara Rp 16.000,- (rincian perhitungan terlampir).
Alat pengaduk yang ada saat ini masih belum sempurna. Banyak
kelemahan-kelemahan yang berpotensi mengurangi nilai ekonomis dari alat yang dapat berimbas pada efisiensi dan efektifitas aktivitas produksi dodol. Kelemahan-kelemahan yang ada antara lain, perlu adanya penyesuaian putaran pengaduk saat
pertama kali mengaduk adonan agar adonan yang masih cair tersebut tidak tumpah, distribusi api yang kurang merata menyebabkab pemborosan gas dan
lama matang, bentuk pisau pengaduk yang belum dapat membalik adonan secara sempurna, serta konstruksi alat yang kurang kokoh.
Untuk mengatasi salah satu kelemahan dari alat pengaduk dodol, yaitu
penyesuaian putaran pengaduk dan distribusi api dapat dilakukan dengan membuat suatu sistem kendali yang berbasis digital. Rangkaian digital
memungkinkan pengendalian putaran motor AC dan katup gas. Digitalisasi alat pengaduk akan memudahkan pengguna, karena pengguna cukup menyampurkan bahan baku pembuatan dodol dan menekan tombol “mulai” kemudian alat akan
bekerja secara otomatis sesuai nilai referensi yang didapat dari penelitian.
Berdasarkan hal diatas, penulis berusaha untuk merancang simulasi
rangkaian digital untuk alat pengadu. Diharapkan dengan perancangan simulasi kendali putaran pengaduk dan besaran api menggunakan rangkaian digital, mampu memberi informasi kelemahan kemampuan alat dalam menyesuaikan
Tujuan Penelitian
Untuk merancang simulasi kendali putaran pengaduk dan besaran api dengan menggunakan rangkaian digital.
Manfaat Penelitian
1. Bagi penulis yaitu sebagai bahan untuk menyusun skripsi yang merupakan syarat untuk menyelesaikan pendidikan di Program Studi Teknik Pertanian
Departeman Teknologi Pertanian Fakultas Pertanian Universitas Sumatera Utara.
2. Bagi mahasiswa, sebagai informasi pendukung untuk melakukan penelitian
lebih lanjut mengenai alat pengaduk dodol mekanis.
Hipotesa Penelitian
Adapun hipotesis penelitian ini adalah :
1. Adanya pengaruh efektifitas dan efisiensi produksi dengan pengendalian kecepatan putaran motor pengaduk. Dikondisikan dengan simulasi.
2. Adanya pengaruh efektifitas, efisiensi, dan kualitas produksi dodol dengan pengendalian besaran api. Dikondisikan dalam simulasi.
Sistem Digital
Sistem digital menggunakan kombinasi-kombinasi BENAR & SALAH
untuk menyelesaikan masalah, sehingga disebut juga logika-logika kombinasional. Dengan sistem digital dapat digunakan langkah-langkah berpikir
logis atau keputusan-keputusan masa lalu (memory) untuk menyelesaikan masalah. Sistem digital sering disebut juga sebagai logika-logika sekuensial (terurut). Sistem digital terdiri dari beberapa rangkaian digital/ logika, komponen
elektronika, dan elemen gerbang logika untuk suatu tujuan pengalihan tenaga/ energi (Soedarto, 1992).
Rangkaian Digital
Rangkaian Digital/ Rangkaian Logika adalah kesatuan dari komponen-komponen elektronika pasif dan aktif yang membentuk suatu fungsi pemrosesan
sinyal digital. Komponen pasif dan aktif itu membentuk elemen logika. Bentuk elemen logika terkecil adalah gerbang logika (Logic Gates). Gerbang logika adalah kesatuan dari komponen elektronika pasif dan aktif yang dapat melakukan
operasi AND, OR, NOT (Ibrahim, 1996).
Rangkaian digital merupakan rangkaian elektronik yang melakukan
pemrosesan sinyal yang bersifat diskrit, yakni sinyal yang nilainya dalam dua keadaan saja, rendah atau tinggi (Muchlas, 2006).
Rangkaian diskrit merupakan rangkaian elektronik yang
hubungan antar komponen dilakukan melalui konduktor. Setiap komponen berdiri
sendiri, sehingga komponen yang rusak dapat langsung diganti tanpa mengganggu kinerja komponen lain.
Perbedaan Rangkaian Digital dan Sistem Digital
Rangkaian Digital
1. Bagian-bagiannya terdiri atas beberapa gerbang logika
2. Outputnya merupakan fungsi pemrosesan sinyal digital 3. Input dan Outputnya berupa sinyal digital
Sistem Digital
1. Bagian-bagiannya terdiri atas beberapa rangkaian digital,gerbang logika, & komponen lainnya
2. Outputnya merupakan fungsi pengalihan tenaga 3. Input dan Outputnya berupa suatu tenaga/ energi
Integrated Circuit (IC)
Integrated Circuit (IC) mengkombinasikan tiga komponen elektronik (dioda, resistor, transistor) dalam sebuah piringan silikon kecil yang terbuat dari
pasir kuarsa. IC merupakan komponen semi-konduktor yang didalamnya memuat puluhan, ratusan, bahkan ribuan atau lebih komponen dasar elektronik yang terdiri dari sejumlah komponen resistor, transistor, dioda, dan komponen semi-konduktor
yang lain.
Komponen-komponen yang ada di dalam IC membentuk suatu sub-sistem
namun tidak tertutup kemungkinan dipergunakan untuk tujuan yang lain. Setiap
jenis IC didisain untuk keperluan khusus, sehingga setiap IC akan memiliki rangkaian internal yang beragam (Hertz Electronic Institute, 2010)
Bit (Binary Digit)
Bit adalah unit terkecil dalam penyimpanan dan komunikasi informasi dalam teori komputasi dan informasi digital. Bit, sebagai sebuah satuan, adalah
jumlah informasi yang dapat dibawa oleh dua pilihan yang mempunyai kemungkinan yang sama. Bit melambangkan kapasitas dari sebuah digit biner. Dalam komputer, bit ditetapkan sebagai variabel kuantitas yang memiliki dua nilai
kemungkinan. Dua nilai kemungkinan ini kemudian dinotasikan dalam angka numerikal 0 dan 1. Dua nilai kemungkinan tersebut juga bisa ditafsirkan sebagai
nilai logika (true/false,yes/no), simbol aljabar (+/-), kondisi ke-aktif-an (on/off), atau lainnya (Ibrahim, 1996).
Byte (bita)
Byte adalah satuan dari sector, byte, bit). Satu byte terdiri dari delapan menyimpan data sebesar 512 byte. Setiap track menyimpan 100.000 byte. Dan satu cluster menyimpan 64 track.
Trigger NE555 adalah sebuah sirkuit pewaktu monolitik yang mampu mengontrol waktu jeda dengan sangat stabil.
NE555 akan menghasilkan gelombang (osilasi) atau waktu jeda yang
diatur secara tepat oleh satu kapasitor dan resistor eksternal. Dengan NE555, pengaturan waktu per milidetik hingga jam dapat dilaksanakan dengan tepat, sehingga timing dari suatu proses dapat ditentukan dengan akurat
(STMicroelectronics, 2007).
Flip-Flop
Flip-flop adalah rangkaian sat mengganti isi dari bit yang disimpan. Prinsip dasar dari flip-flop adalah suatu
komponen elektronika dasar seperti transistor, resistor dan dioda yang dirangkai menjadi suatu gerbang logika yang dapat bekerja secara sekuensial (berurut).
Flip-flop mempunyai dua keluaran, yang satu merupakan komplemen dari yang lainnya.
Rangkaian logika berurut dibedakan atas dua jenis, yaitu serempak
(syncrhonous) dan tak serempak (asynchronous). Dalam rangkaian serempak, perubahan keadaan keluaran hanya terjadi pada saat-saat yang ditentukan saja.
Walaupun masukan berubah diantara selang waktu yang ditentukan itu, keluaran dari rangkaian tidak akan berubah. Sedangkan pada rangkaian tidak serempak, keluarannya berubah menurut perubahan masukannya dan keluaran itu dapat
Dilihat dari cara informasi disimpan, flip-flop dibedakan menjadi empat
jenis, yaitu flip-flop RS (Reset-set), JK (master-slave), D (delay), dan T (Toggle/ Pasak). Pada skripsi ini, yang digunakan adalah flip-flop JK (master-slave).
Flip-flop JK diberi nama berdasarkan nama masukannya, yaitu J dan K. Flip-flop ini mengatasi kelemahan flip-flop RS yang tidak mengizinkan pemberian masukan R=S=1, dengan meng-AND-kan masukan dari luar dengan
keluaran seperti yang dilakukan oleh flip-flop T. Pada flip-flop JK, input merupakan satu-satunya masukan sedangkan keluarannya tetap dua. Jika keadaan
keluaran flip-flop 0, maka setelah adanya sinyal pemicu keadaan berikutnya menjadi 1, dan bila keadaan keluarannya 1 maka setelah ada pemicu keadaannya akan menjadi 0.
Rangkaian Pencacah
Rangkaian pencacah (counter) merupakan rangkaian sederhana dan sangat umum pemakaiannya dalam sistem digital. Pada counter terdapat sekelompok
flip-flop disusun sedemikian rupa, sehingga menunjukan cacah pulsa total yang diumpakan sebagai masukan yang keadaannya berubah sesuai aturan/ urutan yang ditentukan. Flip-flop digunakan sebagai pembagi biner. Counter jika
diumpamakan adalah gir pembanding seperti yang ada pada sistem analog, dimana perbedaan diameter akan menghasilkan radian yang berbeda pada gir yang
lain (Tarigan, 2001).
Setiap flip-flop dalam rangkaian pencacah harganya berubah menurut aturan/ urutan yang ditentukan. Harga maksimum yang dicapai oleh satu pencacah
ditentukan oleh cacah flip-flop yang membentuk rangkaiannya. Untuk pencacah 3 bit, harga maksimum yang dapat dicapai adalah 7 yang tejadi pada saat
Gambar 3. Gambaran Tentang Pencacahan Gelombang
Penguat Op-Amp
Penguat operasional atau op-amp (dari kata Operational Amplifier) adalah
penguat deferensial dengan dua masukan dan satu keluaran yang mempunyai penguatan tegangan yang sangat tinggi, yaitu dengan orde 105. Dengan penguatan
yang tinggi ini, op-amp lebih banyak digunakan daripada penguat transistor. Op-amp dibuat dalam bentuk rangkaian yang sudah didisain dalam IC (integrated circuit). Pemakaian op-amp meliputi bidang elektronika audio, pengatur tegangan, dan lainnya.
Pencacah dua ketukan Satu ketukan
1
1
1 0
0
0
Gambar 4. Lambang penguat op-amp
Aljabar Boole dan Bilangan Biner
Pada aljabar Boole digunakan dua konstanta yaitu logika “0” dan logika
“1”. Dua konstanta tersebut bila diterapkan pada rangkaian logika (logic circuit) akan berupa taraf tegangan (voltage level), dimana logika “1” menyatakan taraf tegangan tinggi (High) dan logika “0” menyatakan taraf tegangan rendah (Low)
(Tarigan, 2001).
Sistem bilangan biner mempunyai harga dua macam simbol angka, yaitu 0
dan 1, sehingga bilangan biner memiliki radik paling kecil : r =2. Dengan menyusun digit-digit 0 dan 1 sesuai kaidah yang berlaku, maka akan dapat berhitung seperti bilangan desimal. Keuntungannya., digit 0 dan 1 dapat
diwujudkan oleh besaran elektris yaitu tegangan (voltage), sehingga nantinya akan dengan mudah mengetahui nilai elektris dari suatu bilangan desimal biasa, bahkan
Gambar 5. Bentuk dasar gelombang sinyal digital
Hal tersebut dilakukan mesin-mesin logika yang bekerja dengan informasi
atau data numerik yang dinyatakan dalam bentuk digital. Dalam besaran listrik, digit 0 berarti tidak ada tegangan (sebenarnya ada, namun kecil, berkisar antara
0 – 2,4 Volt), sedangkan digit 1 berarti ada tegangan (2,4 Volt – 5 Volt). Pada rangkaian digital, nilai 0 dan 1 yang masuk ke trigger akan menghasilkan impuls yang kemudian akan dicacah oleh counter menjadi suatu kombinasi High/Low
sebagai perintah operasi tertentu (Soedarto, 1992).
Pada sistem sandi dengan panjang sandi bervariasi terdapat ketentuan
dimana kombinasi biner dari sebuah sandi tidak boleh digunakan lagi sebagai bit-bit awal pada sandi yang lain. Ketentuan ini untuk memudahkan pemisahan (pendeteksian batas) antar sandi.
Tabel 1. Representasi Besaran Digital
Level Logika 0 Level Logika 1
Tegangan listrik 0 – 0,8 Volt
Titik potensial referensi 0 (ground)
Dioda dengan reverse bias
Transistor dalam keadaan mati (cut off)
Saklar dalam keadaan terbuka
Lampu atau LED dalam keadaan padam
Tegangan listrik 2 – 5 Volt
Titik potensial catu daya (+Vcc)
Dioda dengan forward bias
Transistor dalam keadaan jenuh (saturated)
Saklar dalam keadaan tertutup
Lampu atau LED dalam keadaan menyala
(Sumber : Tarigan, 2001)
Gerbang Logika 1
0
waktu
Gerbang logika adalah piranti dua keadaan, yaitu mempunyai keluaran dua
keadaan, keluaran dengan nol volt yang menyatakan logika “0” (atau rendah) dan keluaran dengan tegangan tetap yang menyatakan logika “1” (atau tinggi).
Gerbang logika dapat mempunyai salah satu dari dua keadaan logika yaitu 0 atau 1 (Ibrahim, 1996).
Gerbang AND
Gerbang AND digunakan untuk menghasilkan logika 1 jika semua masukan mempunyai logika 1, jika tidak, maka akan dihasilkan logika 0. berikut
adalah tabel kebenaran dari gerbang AND :
Tabel 2. Tabel kebenaran gerbang AND tiga masukan
(Sumber : Tarigan, 2001)
Masukan Keluaran
A B C F
0 0 0 0
0 0 1 0
0 1 0 0
0 1 1 0
1 0 0 0
1 0 1 0
1 1 0 0
1 1 1 1
Gerbang NAND
Gerbang NAND akan mempunyai keluaran 0 bila semua masukan pada logika 1. sebaliknya, jika ada sebuah logika 0 pada sembarang masukan pada
gerbang NAND, maka keluarannya akan bernilai 1. Kata NAND merupakan kependekan dari NOT-AND yang merupakan ingkaran dari AND (Ibrahim, 1996).
Gerbang OR
Gerbang OR akan memberi keluaran 1 jika salah satu dari masukannya pada keadaan 1. jika diinginkan keluaran bernilai 0, maka semua masukan harus
dalam keadaan 0.
Gerbang NOR
Gerbang NOR akan memberikan keluaran 0 jika salah satu dari
masukannya pada keadaan 1. Jika diinginkan keluaran bernilai 1, maka semua masukan harus dalam keadaan 0. NOR merupakan singkatan dari NOT-OR, yang
merupakan ingkaran dari OR.
Gerbang NOT
Pintu NOT disebut juga sebagai inverter adalah rangkaian logika yang
berfungsi sebagai “pembalik”. Bila pada rangkaian tersebut dimasukan konstanta “1”, maka keluarannya (output) adalah konstanta “0”.
Tabel 3. Tabel kebenaran gerbang NOT
Masukan A Keluaran F
0 1
1 0
Gerbang XOR
Gerbang XOR (exclusive-or) akan memberikan keluaran 1 jika masukan-masukannya mempunyai keadaan yang berbeda. Keluaran pada XOR merupakan
penjumlahan biner dari masukannya.
Gerbang Kombinasi
Sistem logika biasanya melibatkan lebih dari satu gerbang yang
membentuk suatu kombinasi untuk melakukan suatu fungsi tertentu.
Tabel 4. Karakteristik keluaran tiap gerbang
Masukan Keluaran
A B AND NAND OR NOR XOR
0 0 0 1 0 1 0
0 1 0 1 1 0 1
1 0 0 1 1 0 1
1 1 1 0 1 0 0
Nama Fungsi
Lambang dalam rangkaian
Tabel kebenaran IEC 60617-12 US-Norm DIN 40700 (sebelum
1976)
(AND)
A B Y 0 0 0 0 1 0 1 0 0 1 1 1
(OR)
A B Y 0 0 0 0 1 1 1 0 1 1 1 1 (NOT, Gerbang-komplemen, Pembalik (Inverter))
A Y 0 1 1 0
(Not-AND)
A B Y 0 0 1 0 1 1 1 0 1 1 1 0
(Not-OR)
A B Y 0 0 1 0 1 0 1 0 0 1 1 0
(Antivalen, Exclusive-OR) Atau
A B Y 0 0 0 0 1 1 1 0 1 1 1 0
Atau
Tabel 6. Tabel Binari 4-bit
Q3 Q2 Q1 Q0 Desimal
0 0 0 0 0
0 0 0 1 1
0 0 1 0 2
0 0 1 1 3
0 1 0 0 4
0 1 0 1 5
0 1 1 0 6
0 1 1 1 7
1 0 0 0 8
1 0 0 1 9
(Sumber : Pratama, L., 2010)
[image:32.595.239.372.441.608.2]Simulasi
Simulasi adalah suatu proses peniruan dari sesuatu yang nyata beserta
keadaan sekelilingnya (state of affairs). Aksi melakukan simulasi ini secara umum menggambarkan sifat-sifat karakteristik kunci dari kelakuan sistem fisik atau sistem abstrak tertentu.
Simulasi atau pemodelan sistem fisik digunakan untuk menunjukkan efek nyata, akhir kondisi alternatif, dan program tindakan. Hal kunci dalam simulasi
adalah akuisisi sumber informasi yang valid tentang pemilihan karakteristik kunci yang relevan dan perilaku, penggunaan menyederhanakan perkiraan dan asumsi
serta kesetiaan dan validitas hasil simulasi (Millman, Jacob, 1979)
Arus Bolak-Balik (Alternating Current)
Arus bolak-balik (AC atau alternating current) adalah
besarnya dan arahnya arus berubah-ubah secara bolak-balik. Berbeda denga
Bentuk gelombang dari listrik arus bolak-balik biasanya berbentuk gelombang sinusoida, karena ini yang memungkinkan pengaliran energi yang paling efisien. Namun dalam aplikasi-aplikasi spesifik yang lain, bentuk
gelombang lain pun dapat digunakan, misalnya bentuk gelombang segitiga (triangular wave) atau bentuk gelombang segi empat (square wave)
Gambar 8. Bentuk Gelombang Arus Bolak-Balik
Arus Searah (Direct Current)
Arus searah (direct current atau DC) adalah alir
yang rendah.
Transformator
Pada sistem digital, kesesuaian besar tegangan kerja menjadi hal yang
penting karena penggunaan bilangan biner yang menginfromasikan perintah dalam kondisi High dan Low menjadi informasi tentang voltase yang digunakan. Oleh karena itu, diperlukan power supply untuk mengubah arus bolak-balik (AC)
menjadi arus searah (DC). Komponen utama pada power supply adalah transformator yang digunakan untuk menurunkan tegangan.
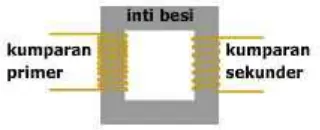
Transformator (trafo) adalah alat yang digunakan untuk menaikkan atau
pokok yaitu: kumparan pertama (primer) yang bertindak sebagai input, kumparan
kedua (sekunder) yang bertindak sebagai output, dan inti besi yang berfungsi
[image:35.595.249.409.207.272.2]untuk memperkuat medan magnet yang dihasilkan (prihono, 2009)
Gambar 9. Bagian-Bagian Transformator
Transformator menggunakan prinsip induksi elektromagnetik. Radiasi elektromagnetik adalah kombinas
tempat yang lain. Tegangan masuk bolak-balik yang membentangi kumparan primer menimbulkan fluks magnet yang idealnya semua bersambung dengan
kumparan sekunder. Fluks bolak-balik ini menghasilkan gaya gerak listrik (GGL) dalam lilitan sekunder untuk kemudian daya pada lilitan primer akan dilimpahkan
ke lilitan sekunder (Hayt, W.H., 2006).
Dioda
Dioda adalah komponen aktif bersaluran dua. Dioda memiliki dua elektroda aktif dimana isyarat listrik dapat mengalir, dan kebanyakan dioda
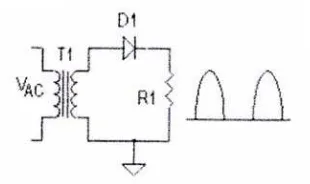
Penyearah (Rectifier)
Prinsip penyearah secara sederhana ditunjukkan pada gambar 10 berikut ini. Transformator diperlukan untuk menurunkan tegangan C dari jala-jala listrik
pada kumparan primernya menjadi tegangan yang lebih kecil pada kumparan
[image:36.595.234.389.255.347.2]sekundernya (Digital Electronic, 2010).
Gambar 10. Rangkaian Penyearah Sederhana
Pada rangkaian ini, dioda berperan untuk hanya meneruskan tegangan
positif ke beban rangkaian listrik. Rangkaian ini disebut dengan penyearah setengah gelombang (half wave). Untuk mendapakan penyearah gelombang penuh
BAHAN DAN METODE PENELITIAN
Lokasi dan Waktu Penelitian
Penelitian ini dilakukan di Laboratorium Teknik Pertanian Fakultas Pertanian Universitas Sumatra Utara, dan mulai dilaksanakan pada bulan Mei 2009 sampai dengan bulan Juni 2010.
Bahan dan Alat
Bahan
Adapun bahan – bahan yang digunakan dalam penelitian ini antara lain : Kawat solder
Lem silikon Kawat kuningan
NE555 (General Purpose Single Bipolar Timers)
TTL SN74LS76 (Dual JK Flip-Flop with Set and Clear)
TTL SN74LS93 (Decode Counter ; Divide by Twelve Counter ; 4-Bit Binary
Counter)
TTL SN74LS47 (BCD to seven segment decoder/ driver)
LED Display Seven Segment (Anoda) TTL SH74HC125 (Quad 3-State Buffers)
TTL SN74LS08 (Quad Rupple 2-input Positive And-Gates)
TTL SN74LS04 (Hex Inverter)
TTL SN74LS21 (Dual 4-input And-Gates)
TTL SN 74LS27 (3-input Positive Nor-Gates)
Optocoupler 4N25 (Phototransistor Output With Base Connection)
Transistor DIP D-313 (NPN) Switch Relay 12V (FK-4098) Trimpots 10K
LM741 (Single Operational Amplifier) Transistor DIP C-945 (NPN)
Transistor DIP A-733 (PNP) Transistor SCR C106DG
Potensiometer 100K (Linear Tapper Potensiometer)
Motor DC 12V 1400RPM Motor DC 12V 2400RPM
Dioda Zener (1N76 THRU 1N759 ; 0,5A) LED (Red, Yellow, Blue, Green)
Transistor (300Ω, 1KΩ, 10KΩ, 16KΩ, 270Ω)
IC Regulator 7805 (5V 1A positive Regulator) IC Regulator 7812 (+12V 1A Positive Regulator)
IC Regulator 7912 (-12V 1A negative Regulator) Kapasitor (10pF, 100nF, 1000μF, 220μF, 2200μF)
Bridge Rectifier 3A Transformator CT 18V 3A
DC FAN 12V (0,16A; 0,23A; 0,3A)
Switch digital
PCB Single-Side Board
Alat
Adapun alat – alat yang digunakan dalam penelitian ini antara lain :
Solder Pasta Solder
Desoldering Gun Keran putar ½” Motor DC Gir Isolasi Kaca pembesar Senter Obeng Tang Pinset Gunting Baut dan mur Bor Listrik
Metode Penelitian
Kendali Besaran Api
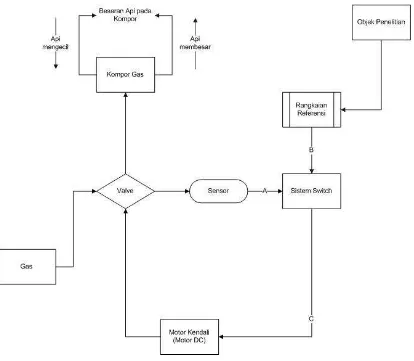
Pada dasarnya, kendali besaran api memanfaatkan rangkaian penjumlah
(C) yang besarannya diambil dari rangkaian referensi (B) berdasarkan pembacaan sensor (A). Rangkaian referensi berisi informasi tentang pembagian waktu proses dan kecepatan yang nilainya didapat dari penelitian. Informasi dari rangkaian
referensi tersebut kemudian diproses oleh rangkaian penjumlah, dalam hal ini digunakan IC op-amp LM741.
Penguat operasional atau op-amp (operational amplifier) adalah penguat diferensial dengan dua masukan dan satu keluaran yang mempunyai penguatan tegangan yang sangat tinggi, yaitu dengan orde 105. Dengan penguatan yang
tinggi ini op-amp memiliki kemampuan yang lebih baik daripada penguat transistor. Penguat op-amp digunakan dalam rangkaian yang sudah didesain
dalam IC (integrated circuit), penguat op-amp juga digunakan sebagai penguat inverting, non-inverting dan penambah (Azies-tech.com, 2006).
Tegangan yang masuk pada penguat inverting akan selalu memiliki
polaritas yang berlawanan dengan sinyal masukannya. Pada penguat non-inverting, tegangan keluaran akan selalu se-fasa dengan tegangan masukannya.
Pada sistem kendali besaran api, yang digunakan adalah penguat penjumlah tegangan,. Dengan menggunakan rangkaian penguat membalik dasar dan menambahkan resistor pada masukan lainnya, sehingga tegangan keluaran akan
umpan-balik yang bersesuaian. Artinya, sistem akan selalu mencari nilai 0. proses
yang berlangsung pada rangkaian penjumlah menjadi dasar bagi sensor untuk menggerakan motor DC yang kemudian memutar katup gas untuk mendapatkan
[image:41.595.116.530.203.564.2]besaran api sesuai dengan yang ditetapkan oleh rangkaian referensi.
Gambar 11. Proses kendali besaran api
Berikut model matematika untuk rangkaian penjumlah :
Misalkan nilai A yang masuk adalah + 5 Volt dan nilai B adalah – 5 Volt maka
nilai di C adalah 0. Nilai 0 adalah posisi motor DC berhenti bergerak (Halt).
Jika nilai A yang masuk lebih kecil dari nilai B, maka C bernilai negatif. Artinya
motor DC akan memutar keran searah jarum jam (clockwise).
Jika nilai A yang masuk lebih besar dari nilai B, maka C bernilai positif. Artinya motor DC akan memutar keran berlawanan arah jarum jam (counter clockwise).
Motor DC akan terus berputar searah atau berlawanan arah jarum jam sampai C bernilai 0, dimana 0 merupakan besaran api yang dikehendaki rangkaian referensi.
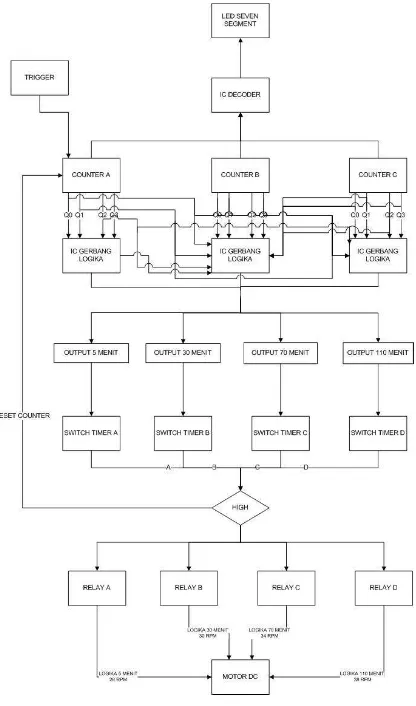
Kendali Kecepatan Putaran Pengaduk Dodol
Untuk mengatur kecepatan putaran pengaduk dodol digunakan trigger NE555. Trigger NE555 mampu menghasilkan jeda waktu (time delay) atau osilasi
akurat yang dapat dikontrol dengan sangat baik oleh sirkuit pewaktu monolitik yang terdapat pada NE555. Frekuensi yang dihasilkan oleh trigger akan dikumpulkan oleh counter 4 bit
Pada tiap counter terdapat dua seksi yang kemudian tiap seksi tersebut dibagi lagi menjadi dua, lima, enam atau delapan seksi yang tiap seksinya akan
menerima input High atau Low. Counter kemudian akan membaginya sesuai pembagian waktu yang dikehendaki. Selanjutnya counter akan menghasilkan kombinasi digital berupa 1 (tinggi) dan 0 (rendah) pada setiap pin-nya. Dalam
counter juga terdapat flip-flop yang digunakan sebagai unsur pengingat (memory) yang menyimpan satu bit binari informasi logika dari kombinasi sebelumnya yang
digunakan untuk me-reset counter selanjutnya dalam menghasilkan kombinasi digital.
Kombinasi digital kemudian akan dilanjutkan ke gerbang logika.. Gerbang
logika akan mengumpulkan kombinasi digital yang dihasilkan oleh counter untuk kemudian dilanjutkan ke flip-flop, dimana flip-flop digunakan sebagai unsur
pengingat (memory) pada rangkaian logika berurut serempak untuk menyimpan kombinasi logika. Disebut berurut serempak karena perubahan keadaan keluaran hanya terjadi pada saat-saat yang ditentukan, keluaran daripada rangkaian itu tidak
Setiap gerbagng logika akan menghasilkan output sinyal bernilai High
sesuai dengan batasan waktu yang ditetapkan. Kondisi High ini akan diteruskan ke transistor SCR C106DG. Transistor SCR pada rangkaian ini digunakan sebagai
switch digital yang dapat memutus dan meneruskan arus.
Saat kaki Gate dari transistor diberi sinyal High, anoda dan katoda akan terhubung dan arus dialirkan dengan ditandai berpendarnya LED. Logika High
dari transistor SCR akan diteruskan ke rangkaian pengatur kecepatan motor. Optocoupler berfungsi sebagai sensor pemutus dan penghubung. Saat arus diberikan pada kaki anoda, anoda dan katoda terhubung yang menyebabkan ruang uji photo transistor ter-emisi dan meneruskan arus. Arus dari optocoupler akan dikuatkan dengan transistor DIP D-313. setelah dikuatkan, arus akan diteruskan
pada switch relay. Kondisi switch relay yang diberi arus akan membuat saklar berada pada kondisi normaly open. Kondisi ini arus akan diteruskan untuk
menggerakkan motor DC yang putarannya sudah disesuaikan menggunakan trimpots sesuai dengan nilai referensi yang dikehendaki.
Saat sudah tidak ada logika lagi yang berlaku pada timer, timer akan
Prosedur Penelitian
Pembuatan alat simulasi dibagi menjadi 3 (tiga) pekerjaan utama, yaitu : pembuatan power supply, pembuatan rangkaian penghitung (Timer) dan
pembuatan rangkaian pembagi.
Pembuatan power supply
1. Disiapkan trafo step down CT 18V 3A untuk menurunkan tegangan 220V
menjadi +9V.
2. Dibuat rancangan power supply.
3. disiapkan dioda rectifier, IC-IC regulator, dan kipas.
4. dihubungkan output, +9V trafo ke input (+) rectifier, dan 0V ke input (-) rectifier.
5. Dihubungkan ke IC-IC regulator. IC 7805 untuk mendapatkan output +5V, 7812 untuk tegangan +12V dan 7912 untuk tegangan -12V.
6. Dihubungkan kipas kerangkaian mengingat suhu kerja mencapai 800 C dan untuk mencegah over heat tiap komponen yang bekerja.
7. Dihitung menggunakan multi-tester apakah tiap output sudah sesuai
dengan nilai tegangan yang dikehendaki.
Pembuatan Rangkaian Penghitung (Timer)
Perancangan Timer Simulasi Kendali Putaran Pengaduk
1. Diteliti nilai dari rangkaian referensi dengan mengamati proses pembuatan dodol secara manual serta membandingkan dengan proses pembuatan
2. Dilakukan studi khusus pemilihan komponen IC yang sesuai dengan
keperluan perakitan alat simulasi.
3. Disiapkan rangkaian power supply dengan memanfaatkan trafo CT 18V
dan IC 7805, 7812, serta 7912. IC 7805 akan mengeluarkan tegangan +5V, IC 7812 akan mengeluarkan tegangan +12V dan IC 7912 akan mengeluarkan tegangan –12V.
4. Diambil nilai asumsi pembuatan dodol standar berdasarkan proses yang dikerjakan secara manual. Nilai asumsi tersebut berupa waktu pemasakan,
kecepatan pengaduk dan nilai bukaan kran gas yang nantinya akan dilaksanakan oleh rangkaian digital.
5. Disiapkan Project Board untuk tempat kaki-kaki IC diletakkan sesuai
informasi datasheet-nya.
6. Dipasang NE555 dan IC counter, decoder, dan BCD 7 Segment.
7. Disusun agar jalur kabel tidak terlalu berbelit-belit.
8. Disambungkan jalur-jalur (kaki-kaki IC) sesuai ketentuan yang berlaku (lihat lampiran datasheet).
9. Disiapkan IC gerbang logika setelah rangkaian penghitung waktu selesai dirangka i.
10.Disambungkan kaki keluaran Q0, Q1, Q2, Q3 pada IC counter rangkaian
penghitung waktu ke rangkaian IC gerbang logika yang selanjutnya akan menjadi masukan pada rangkaian pembagi (IC Flip-Flop – SN74LS76).
11.Disambungkan keluaran dari IC Flip-Flop switch relay pada rangkaian pembagi yang berfungsi membagi tenaga putaran motor sesuai nilai
Perancangan Timer Simulasi Kendali Besaran Api
1. Diambil kombinasi High pada kaki-kaki IC SN 74LS93 (decode counter 4-bit binary) sesuai logika biner 4-bit dengan waktu yang sudah ditetapkan, misalnya pada tahapan waktu pertama (5 menit ; 0.05.00 / h.mm.ss), maka logika biner yang berlaku adalah Q0 = 1 ; Q1 = 0 ; Q2 = 1 ;
Q3 = 0 (lihat tabel binari 4-bit).
2. Disambungkan kaki-kaki yang bernilai High tadi pada IC-IC gerbang logika dengan dasar pemikiran bahwa keluaran High dari 74LS93 pada
nilai 5 yang berulang tidak mempengaruhi tahapan yang sedang berlangsung.
3. Disambungkan switch relay ke motor DC pengatur gerakan buka-tutup
kran.
Perancangan Rangkaian Pembagi
Rangkaian Pembagi Putaran Motor
1. Disiapkan komponen-komponen yang terlibat (PCB Bolong 0.8 mm,
LM741, Optocoupler 4n235, Trimpot 1K, transistor DIP D-313, dan switch relay 12V 5-pin).
2. Disusun dan disambungkan sesuai dengan desain.
3. Disambungkan input pada optocoupler dengan keluaran yang ada pada IC 74LS76 di timer sesuai dengan taraf pembagian waktu yang ada.
4. Disambungkan output pada NO (Normaly Out) switch relay, lalu digabung NO pada setiap switch relay untuk kemudian menjadi tegangan Positif (+)
5. Dilihat apakah motor DC bergerak sesuai dengan kecepatan yang
diingikan pada taraf waktu yang berlaku saat itu.
Rangkaian Pembagi Bukaan Gas
1. Disiapkan komponen-komponen yang terlibat (PCB Bolong 0.8 mm, LM741, Optocoupler 4n235, Trimpot 1K, transistor DIP D-313, potensiometer 100K, motor DC 12v 2400rpm, dan switch relay 12V
5-pin).
2. Seperti pada rangkaian pembagi putaran motor, disususn dan
disambungkan komponen-komponen sesuai dengan disain.
3. Disambungkan input optocoupler pada output rangkaian timer sesuai taraf waktu yang ditetapkan.
4. Disambungkan tegangan -12V pada VEE LM741 yang berfungsi sebagai
op-amp (komparator).
5. Disambungkan NO switch relay yang kemudian menjadi input positif (+) LM741 dan input negatif pada pin 2 potensiometer. Disini kita sedang merancang rangkaian komparator.
6. Disambungkan output dari LM741 pada motor DC.
7. Dilihat, apakah motor DC dapat memutar potensiometer menuju nilai
Parameter yang Diamati
1. Kendali otomasi
Kendali otomasi dilihat dari hidup-matinya lampu indikator pada sistem timer.
Menyalanya lampu menunjukan adanya arus yang keluar dari gerbang switch. Besaran arus yang keluar dari gerbang tersebut bernilai high (4,5 V- 5,0 V). Arus ini akan dimanfaatkan sebagai input pada sistem switch pengatur
kecepatan putar dan bukaan gas. 2. Logika per nilai referensi yang berlaku
HASIL DAN PEMBAHASAN
Cara kerja Integrated Circuit (IC)
Diambil contoh IC gerbang And. Dari konfigurasi pin pada gambar, diketahui pin 7 dihubungkan ke grounding yang merepresentasikan logika “0” Low. Dan pin 14 dihubungkan ke Vcc +5 V yang merepresentasikan kondisi High atau logika”1”.
Dengan memanfaatkan LED dan resistor pada salah satu kaki output IC
And (misal pin ke-3), akan diketahui bagaimana sebuah IC gerbang And bekerja. Saat kaki-kaki pin tidak dihubungkan pada apapun, maka kaki-kaki tersebut akan berada pada kondisi floats high. Artinya, gerbang akan berasumsi kaki-kaki pin
tersebut bernilai “1”. Mengingat syarat gerbang And akan bernilai “:1” jika input pernilai “1”. Keadaan ini dilihat dengan menyalanya lampu LAD.
Gambar 14. IC gerbang And
NE555
Fungsi masing-masing pin IC 555 :
Pin 1 (Ground). Pin ini merupakan titik referensi untuk seluruh sinyal dan
tegangan pada rangkaian 555, baik rangkaian intenal maupun rangkaian
eksternalnya.
Pin 2 (Trigger). Berfungsi untuk membuat output high, ini terjadi pada saat level
tegangan pin trigger dari High menuju < 1/3 Vcc
Pin 3 (Output). Output mempunyai 2 keadaan, High dan Low
Pin 4 (Reset). Pada saat low, pin 4 akan reset. Pada saat reset, output akan Low.
Supaya bisa bekerja, pin 4 harus diberi High.
Pin 5 (Voltage Control). Jika pin 5 diberi tegangan, maka level tegangan
threshold akan berubah dari 2/3 Vcc menjadi V5. Level tegangan trigger akan berubah dari 2/3 Vcc menjadi V5
Pin 6 (Threshold). Untuk membuat output Low, terjadi pada saat tegangan pin 6
dari Low menuju > 1/3 Vcc
Pin 7 (Discharge). Output Low, pin 7 akan Low Impedance. Output High, pin 8
akan High Impedance.
Pin 8 (Vcc). Pin ini untuk menerima supply DC voltage yang diberikan. Biasanya
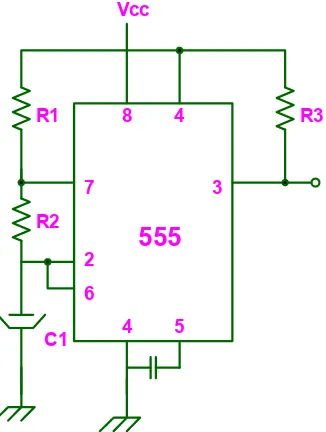
Cara Kerja IC NE555 8 4 7 2 6 4 5 3
555
R1 R2 R3 Vcc C1Gambar 15. Konfigurai NE555
Apabila diberikan supply Vcc=0 Volt. Kaki 2 memberi trigger dari tegangan yang
tinggi (Vcc) menuju 1/3 Vcc(<1/3 Vcc), kaki 3(output) akan high dan pada saat tersebut kaki 7 mempunyai nilai hambatan yang besar terhadap Ground atau kaki
7 akan High Impedance. C1 diisi melalui Vcc R1 R2 C1, Setelah 0,7 (R1+R2) C1 detik, maka tegangan C1=2/3 Vcc. Sehingga kaki 3 (ouput) akan Low, pada saat tersebut, kaki 7 akan mempunyai nilai hambatan yang rendah sekali terhadap Ground atau pin 7 akan Low Impedance. C1 membuang muatan,
setelah 0,7(R2) C1 detik, maka Teg C1=1/3 Vcc. Trigger terjadi lagi sehingga output akan High. Pin 7 akan high Impedance dan C1 diisi kembali.
0,7 (R2) C1
0,7 (R1+R2) C1
TTL SN 74LS47 (BCD to Seven Segment Decoder/Driver)
SN 74LS47 adalah sebuah IC decoder yang dapat memproses sinyal digital untuk kemudian ditampilkan dalam bentuk analog pada LED Seven
Segment.
Gambar 17. Diagram logis 74LS47
LED Seven Segment (ANODA)
LED Seven Segment digunakan untuk membaca nilai pulsa dari trigger,
bekerja dengan meng-emisi setiap segment dengan arus yang menyebabkannya berpendar merah sesuai output dari decoder 74LS47.
TTL SN 74LS93 (Decode Counter : Divide by Twelve Counter 4-Bit)
Digunakan sebagai pencacah pulsa dari trigger. Dasar logika waktu pada nilai referensi diambil dari keluaran High yang ada pada kaki Q0, Q1, Q2, dan Q3.
Gambar 19. Diagram logis 74LS93
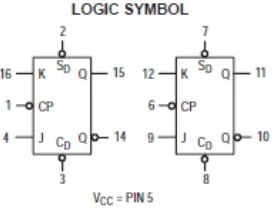
TTL SN 74LS76 (DUAL JK FLIP-FLOP WITH SET AND CLEAR)
Digunakan sebagai resetter counter dan membersihkan counter dari kombinasi logika yang masih tersisa, sehingga tidak mengganggu proses
[image:56.595.238.374.596.700.2]berikutnya.
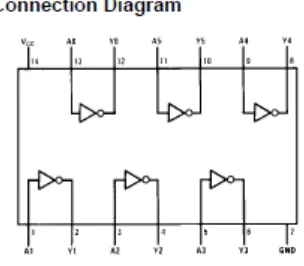
TTL SN 74LS04 (HEX INVERTER)
[image:57.595.233.385.168.301.2]Digunakan untuk mengubah polaritas sinyal digital.
Gambar 21. Diagram logis 74LS04
TTL SN 74LS08, SN 74LS21 (IC-IC Gerbang And)
Merupakan IC gerbang And yang tiap inputnya berlaku sesuai dengan syarat yang baku seperti berikut :
Tabel 7. Tabel kebenaran gerbang And empat masukan
Masukan Keluaran
A B C D F
0 0 0 0 0
0 0 0 1 0
0 0 1 0 0
0 0 1 1 0
0 1 0 0 0
0 1 0 1 0
0 1 1 0 0
0 1 1 1 0
1 0 0 0 0
1 0 0 1 0
1 0 1 0 0
1 0 1 1 0
1 1 0 0 0
1 1 0 1 0
1 1 1 0 0
Gambar 22. Diagram logis 74LS08
Gambar 23. Diagram logis 74LS21
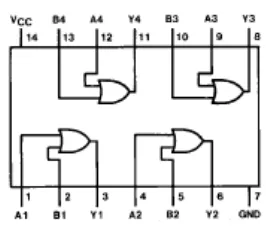
TTL SN 74LS32 (QUAD 2-INPUT OR GATES)
Merupakan IC gerbang Or dengan syarat baku yang berlaku seperti berikut :
Tabel 8. Tabel kebenaran gerbang And dua masukan
Masukan Keluaran
A B F
0 0 0
0 1 1
1 0 1
Gambar 24. Diagram logis 74LS32
TTL SN 74LS27 (TRIPPLE INPUT NOR GATES)
Merupakan ic gerbang Nor dengan syarat sebagai berikut :
Tabel 9. Tabel kebenaran gerbang Nor
A B C Y
0 0 0 1
0 0 1 0
0 1 0 0
0 1 1 0
1 0 1 0
1 1 0 0
[image:59.595.249.382.126.241.2]1 1 1 0
Optocoupler 4N25
Optocoupler merupakan piranti elektronika yang berfungsi sebagai pemisah antara rangkaian power dengan rangkaian control.
Optocoupler merupakan salah satu jenis komponen yang memanfaatkan sinar sebagai pemicu on/off-nya. Opto berarti optic dan coupler berarti pemicu.
Sehingga bisa diartikan bahwa optocoupler merupakan suatu komponen yang bekerja berdasarkan picu cahaya optic .Opto-coupler termasuk dalam sensor,
[image:60.595.193.426.415.590.2]dimana terdiri dari dua bagian yaitu transmitter dan receiver. Dasar rangkaian dapat ditunjukkan seperti pada gambar dibawah ini:
Gambar 26. Optocoupler
Bagian pemancar atau transmitter dibangun dari sebuah led infra merah untuk
mendapatkan ketahanan yang lebih baik daripada menggunakan led biasa. Sensor ini bisa digunakan sebagai isolator dari rangkaian tegangan rendah kerangkaian
penghalang antara transmitter dan receiver dengan memberi ruang uji dibagian
tengah antara led dengan photo-transistor. Penggunaan ini bisa diterapkan untuk mendeteksi putaran motor atau mendeteksi lubang penanda disket pada disk drive
computer. Tapi pada alat yang penulis buat optocoupler untuk mendeteksi putaran.
Penggunaan dari optocoupler tergantung dari kebutuhannya. Ada berbagai macam bentuk, jenis, dan type. Seperti MOC 3040 atau 3020, 4N25 atau 4N33dan
sebagainya.
Pada umumnya semua jenis optocoupler pada lembar datanya mampu dibebani tegangan sampai 7500 Volt tanpa terjadi kerusakan atau kebocoran. Biasanya dipasaran optocoupler tersedianya dengan type 4NXX atau MOC
XXXX dengan X adalah angka part valuenya. Untuk type 4N25 ini mempunyai tegangan isolasi sebesar 2500 Volt dengan kemampuan maksimal led dialiri arus
fordward sebesar 80 mA. Namun besarnya arus led yang digunakan berkisar antara 15mA - 30 mA dan untuk menghubungkan-nya dengan tegangan +5 Volt
diperlukan tahanan pembatas.
Switch Relay
Gambar 27. Gambaran Kerja Relay
Pulsa dari trigger NE555 akan diproses oleh IC counter untuk kemudian diteruskan oleh IC-IC gerbang logika untuk kemudian menjadi masukan (input) pada sistem switch rangkaian timer sesuai nilai referensi waktu yang ditetapkan.
Pada keadaan idle (belum ada sinyal HIGH dari IC gerbang logika) sebenarnya pada kaki anoda transistor SCR buffer sudah bernilai HIGH, namun
belum dapat mengalirkan arus. SCR merupakan komponen penyearah yang mempunyai bagian pengontrol disebut Gate. SCR disebut juga komponen empat
Gambar 28. Simbol SCR.
Cara menentukan kaki SCR :
• Hubung singkat ketiga kaki SCR.
• Jika senur hitam (+) dihubungkan dengan kaki anoda dan senur merah (-)
dihubungkan dengan kaki katoda sedangkan kaki gate dibiarkan,jarum
ohmmeter tidak akan menyimpang kekanan.
• Jika pada kaki gate diberi forward bias ( tegangan maju ). Maka jarum
ohmmeter akan menyimpang kekanan meskipun bias di lepas.
Sifat transistor SCR ini adalah sebagai switch. Jika kaki gate diberi pulsa high,
walau hanya sesaat, maka tehubunglah anoda-katoda pada scr yang memungkinkan arus mengalir. Mengalirnya arus ditandai dengan menyalanya
lampu LED.
Tabel 10. Data Logika High-Low pada tiap Input dan Output
T (menit) Input yang Berlaku Output dari Switch timer
I0 I1 I2 I3 I4 I5 I6 O0 O1 O2 O3 O4 O5 O6
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
2 0 0 0 0 0 0 0 0 0 0 0 0 0 0
3 0 0 0 0 0 0 0 0 0 0 0 0 0 0
4 (Logika I) 1 0 0 0 1 0 0 1 0 0 0 1 0 0
5 0 0 0 0 0 0 0 1 0 0 0 1 0 0
6 0 0 0 0 0 0 0 1 0 0 0 1 0 0
7 0 0 0 0 0 0 0 1 0 0 0 1 0 0
8 0 0 0 0 0 0 0 1 0 0 0 1 0 0
9 0 0 0 0 0 0 0 1 0 0 0 1 0 0
10 0 0 0 0 0 0 0 1 0 0 0 1 0 0
11 0 0 0 0 0 0 0 1 0 0 0 1 0 0
12 0 0 0 0 0 0 0 1 0 0 0 1 0 0
13 0 0 0 0 0 0 0 1 0 0 0 1 0 0
14 0 0 0 0 0 0 0 1 0 0 0 1 0 0
15 0 0 0 0 0 0 0 1 0 0 0 1 0 0
16 0 0 0 0 0 0 0 1 0 0 0 1 0 0
17 0 0 0 0 0 0 0 1 0 0 0 1 0 0
18 0 0 0 0 0 0 0 1 0 0 0 1 0 0
19 0 0 0 0 0 0 0 1 0 0 0 1 0 0
20 0 0 0 0 0 0 0 1 0 0 0 1 0 0
21 0 0 0 0 0 0 0 1 0 0 0 1 0 0
22 0 0 0 0 0 0 0 1 0 0 0 1 0 0
23 0 0 0 0 0 0 0 1 0 0 0 1 0 0
24 0 0 0 0 0 0 0 1 0 0 0 1 0 0
25 0 0 0 0 0 0 0 1 0 0 0 1 0 0
26 0 0 0 0 0 0 0 1 0 0 0 1 0 0
27 0 0 0 0 0 0 0 1 0 0 0 1 0 0
28 0 0 0 0 0 0 0 1 0 0 0 1 0 0
I0 I1 I2 I3 I4 I5 I6 O0 O1 O2 O3 O4 O5 O6
30 (logika II) 0 1 0 0 0 0 0 0 1 0 0 1 0 0
31 0 0 0 0 0 0 0 0 1 0 0 1 0 0
32 0 0 0 0 0 0 0 0 1 0 0 1 0 0
33 0 0 0 0 0 0 0 0 1 0 0 1 0 0
34 0 0 0 0 0 0 0 0 1 0 0 1 0 0
35 0 0 0 0 0 0 0 0 1 0 0 1 0 0
36 0 0 0 0 0 0 0 0 1 0 0 1 0 0
37 0 0 0 0 0 0 0 0 1 0 0 1 0 0
38 0 0 0 0 0 0 0 0 1 0 0 1 0 0
39 0 0 0 0 0 0 0 0 1 0 0 1 0 0
40 0 0 0 0 0 0 0 0 1 0 0 1 0 0
41 0 0 0 0 0 0 0 0 1 0 0 1 0 0
42 0 0 0 0 0 0 0 0 1 0 0 1 0 0
43 0 0 0 0 0 0 0 0 1 0 0 1 0 0
44 0 0 0 0 0 0 0 0 1 0 0 1 0 0
45 0 0 0 0 0 0 0 0 1 0 0 1 0 0
46 0 0 0 0 0 0 0 0 1 0 0 1 0 0
47 0 0 0 0 0 0 0 0 1 0 0 1 0 0
48 0 0 0 0 0 0 0 0 1 0 0 1 0 0
49 0 0 0 0 0 0 0 0 1 0 0 1 0 0
50 0 0 0 0 0 0 0 0 1 0 0 1 0 0
51 0 0 0 0 0 0 0 0 1 0 0 1 0 0
52 0 0 0 0 0 0 0 0 1 0 0 1 0 0
53 0 0 0 0 0 0 0 0 1 0 0 1 0 0
54 0 0 0 0 0 0 0 0 1 0 0 1 0 0
55 0 0 0 0 0 0 0 0 1 0 0 1 0 0
56 0 0 0 0 0 0 0 0 1 0 0 1 0 0
57 0 0 0 0 0 0 0 0 1 0 0 1 0 0
58 0 0 0 0 0 0 0 0 1 0 0 1 0 0
59 0 0 0 0 0 0 0 0 1 0 0 1 0 0
60 0 0 0 0 0 0 0 0 1 0 0 1 0 0
I0 I1 I2 I3 I4 I5 I6 O0 O1 O2 O3 O4 O5 O6
62 0 0 0 0 0 0 0 0 1 0 0 1 0 0
63 0 0 0 0 0 0 0 0 1 0 0 1 0 0
64 0 0 0 0 0 0 0 0 1 0 0 1 0 0
65 0 0 0 0 0 0 0 0 1 0 0 1 0 0
66 0 0 0 0 0 0 0 0 1 0 0 1 0 0
67 0 0 0 0 0 0 0 0 1 0 0 1 0 0
68 0 0 0 0 0 0 0 0 1 0 0 1 0 0
69 0 0 0 0 0 0 0 0 1 0 0 1 0 0
70 (Logika III) 0 0 1 0 0 1 0 0 0 1 0 0 1 0
71 0 0 0 0 0 0 0 0 0 1 0 0 1 0
72 0 0 0 0 0 0 0 0 0 1 0 0 1 0
73 0 0 0 0 0 0 0 0 0 1 0 0 1 0
74 0 0 0 0 0 0 0 0 0 1 0 0 1 0
75 0 0 0 0 0 0 0 0 0 1 0 0 1 0
76 0 0 0 0 0 0 0 0 0 1 0 0 1 0
77 0 0 0 0 0 0 0 0 0 1 0 0 1 0
78 0 0 0 0 0 0 0 0 0 1 0 0 1 0
79 0 0 0 0 0 0 0 0 0 1 0 0 1 0
80 0 0 0 0 0 0 0 0 0 1 0 0 1 0
81 0 0 0 0 0 0 0 0 0 1 0 0 1 0
82 0 0 0 0 0 0 0 0 0 1 0 0 1 0
83 0 0 0 0 0 0 0 0 0 1 0 0 1 0
84 0 0 0 0 0 0 0 0 0 1 0 0 1 0
85 0 0 0 0 0 0 0 0 0 1 0 0 1 0
86 0 0 0 0 0 0 0 0 0 1 0 0 1 0
87 0 0 0 0 0 0 0 0 0 1 0 0 1 0
88 0 0 0 0 0 0 0 0 0 1 0 0 1 0
89 0 0 0 0 0 0 0 0 0 1 0 0 1 0
90 0 0 0 0 0 0 0 0 0 1 0 0 1 0
91 0 0 0 0 0 0 0 0 0 1 0 0 1 0
92 0 0 0 0 0 0 0 0 0 1 0 0 1 0
I0 I1 I2 I3 I4 I5 I6 O0 O1 O2 O3 O4 O5 O6
94 0 0 0 0 0 0 0 0 0 1 0 0 1 0
95 0 0 0 0 0 0 0 0 0 1 0 0 1 0
96 0 0 0 0 0 0 0 0 0 1 0 0 1 0
97 0 0 0 0 0 0 0 0 0 1 0 0 1 0
98 0 0 0 0 0 0 0 0 0 1 0 0 1 0
99 0 0 0 0 0 0 0 0 0 1 0 0 1 0
100 0 0 0 0 0 0 0 0 0 1 0 0 1 0
101 0 0 0 0 0 0 0 0 0 1 0 0 1 0
102 0 0 0 0 0 0 0 0 0 1 0 0 1 0
103 0 0 0 0 0 0 0 0 0 1 0 0 1 0
104 0 0 0 0 0 0 0 0 0 1 0 0 1 0
105 0 0 0 0 0 0 0 0 0 1 0 0 1 0
106 0 0 0 0 0 0 0 0 0 1 0 0 1 0
107 0 0 0 0 0 0 0 0 0 1 0 0 1 0
108 0 0 0 0 0 0 0 0 0 1 0 0 1 0
109 0 0 0 0 0 0 0 0 0 1 0 0 1 0
110 (Logika IV) 0 0 0 1 0 0 1 0 0 0 1 0 0 1
111 0 0 0 0 0 0 0 0 0 0 1 0 0 1
112 0 0 0 0 0 0 0 0 0 0 1 0 0 1
113 0 0 0 0 0 0 0 0 0 0 1 0 0 1
114 0 0 0 0 0 0 0 0 0 0 1 0 0 1
115 0 0 0 0 0 0 0 0 0 0 1 0 0 1
116 0 0 0 0 0 0 0 0 0 0 1 0 0 1
117 0 0 0 0 0 0 0 0 0 0 1 0 0 1
118 0 0 0 0 0 0 0 0 0 0 1 0 0 1
119 0 0 0 0 0 0 0 0 0 0 1 0 0 1
120 0 0 0 0 0 0 0 0 0 0 1 0 0 1
121 0 0 0 0 0 0 0 0 0 0 1 0 0 1
122 0 0 0 0 0 0 0 0 0 0 1 0 0 1
123 0 0 0 0 0 0 0 0 0 0 1 0 0 1
124 0 0 0 0 0 0 0 0 0 0 1 0 0 1
I0 I1 I2 I3 I4 I5 I6 O0 O1 O2 O3 O4 O5 O6
126 0 0 0 0 0 0 0 0 0 0 1 0 0 1
127 0 0 0 0 0 0 0 0 0 0 1 0 0 1
128 0 0 0 0 0 0 0 0 0 0 1 0 0 1
129 0 0 0 0 0 0 0 0 0 0 1 0 0 1
130 0 0 0 0 0 0 0 0 0 0 1 0 0 1
131 0 0 0 0 0 0 0 0 0 0 1 0 0 1
132 0 0 0 0 0 0 0 0 0 0 1 0 0 1
133 0 0 0 0 0 0 0 0 0 0 1 0 0 1
134 0 0 0 0 0 0 0 0 0 0 1 0 0 1
135 0 0 0 0 0 0 0 0 0 0 1 0 0 1
136 0 0 0 0 0 0 0 0 0 0 1 0 0 1
137 0 0 0 0 0 0 0 0 0 0 1 0 0 1
138 0 0 0 0 0 0 0 0 0 0 1 0 0 1
139 0 0 0 0 0 0 0 0 0 0 1 0 0 1
140 0 0 0 0 0 0 0 0 0 0 1 0 0 1
141 0 0 0 0 0 0 0 0 0 0 1 0 0 1
142 0 0 0 0 0 0 0 0 0 0 1 0 0 1
143 0 0 0 0 0 0 0 0 0 0 1 0 0 1
144 0 0 0 0 0 0 0 0 0 0 1 0 0 1
145 0 0 0 0 0 0 0 0 0 0 1 0 0 1
146 0 0 0 0 0 0 0 0 0 0 1 0 0 1
147 0 0 0 0 0 0 0 0 0 0 1 0 0 1
148 0 0 0 0 0 0 0 0 0 0 1 0 0 1
149 0 0 0 0 0 0 0 0 0 0 1 0 0 1
150 0 0 0 0 0 0 0 0 0 0 1 0 0 1
151 0 0 0 0 0 0 0 0 0 0 1 0 0 1
152 0 0 0 0 0 0 0 0 0 0 1 0 0 1
153 0 0 0 0 0 0 0 0 0 0 1 0 0 1
154 0 0 0 0 0 0 0 0 0 0 1 0 0 1
155 0 0 0 0 0 0 0 0 0 0 1 0 0 1
156 0 0 0 0 0 0 0 0 0 0 1 0 0 1
I0 I1 I2 I3 I4 I5 I6 O0 O1 O2 O3 O4 O5 O6
158 0 0 0 0 0 0 0 0 0 0 1 0 0 1
159 0 0 0 0 0 0 0 0 0 0 1 0 0 1
160 (Stop) 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Keterangan :
Analisa Data
1. Pada logika I (5 menit), kombinasi logika yang berlaku adalah
Ditaraf ini, switch A dan E hidup yang kemudian mengaktifkan optocoupler A dan E dirangkaian pengatur kecepatan dan bukaan gas. Ditaraf ini pula berlaku
kecepatan putaran motor sebesar 26 RPM dengan bukaan gas 100%.
Switch A dan E akan terus aktif sampai ia mendapat sinyal lain dari switch berikutnya.
2. Pada logika II (30 menit) logika yang berlaku adalah :
Ditaraf ini, switch A karena mendapat sinyal dari switch B. Switch B yang
mendapatkan sinyal high dari IC gerbang logika mengalirkan arus di anoda-katodanya yang kemudian dialirkan menuju rangkaian pengatur kecepatan
motor. Pada logika ini berlaku kecepatan motor sebesar 30 RPM dan bukaan gas sebesar 100%.
3. Pada logika III (70 menit atau ! jam 10 menit) logika yang berlaku adalah :
Ditaraf ini, sinyal dari IC gerbang logika akan mengaktifkan switch C dan switch F lalu mematikan switch B. Proses hidup-mati switch-switch ini didukung oleh IC inverter 74LS04 yang mengubah polaritas setiap
masukannya menjadi kebalikan dari awalnya.
Pada logika ini berlaku kecepatan motor sebesar 34 RPM dan bukaan gas
sebesar 90%.
I0 I1 I2 I3 I4 I5 I6 O0 O1 O2 O3 O4 O5 O6
1 0 0 0 1 0 0 1 0 0 0 1 0 0
I0 I1 I2 I3 I4 I5 I6 O0 O1 O2 O3 O4 O5 O6
0 1 0 0 0 0 0 0 1 0 0 1 0 0
I0 I1 I2 I3 I4 I5 I6 O0 O1 O2 O3 O4 O5 O6
4. Pada logika IV (110 menit atau 1 jam 50 menit) logika yang berlaku adalah :
Berikutnya ditaraf ini, sinyal dari IC gerbang logika akan mematikan switch C dan F kemudian mengaktifkan switch D dan G untuk kemudian meneruskan kerangkaian pengatur putaran motor dan bukaan gas agar dapat melakukan
kerja sebesar 38 RPM dan bukaan gas sebesar 80%.
5. Pada logika V (160 menit atau 2 jam 40 menit) logika yang berlaku adalah :
Semua logika bernilai Low, semua switch mati menandakan satu proses
selesai. IC 74LS76 berrperan sebagai IC Clear and Reset, dimana ia akan mencegah tersisanya kombinasi logika pada counter agar tidak
membingungkan atau mengacaukan hitungan biner pada proses selanjutnya. I0 I1 I2 I3 I4 I5 I6 O0 O1 O2 O3 O4 O5 O6
0 0 0 1 0 0 1 0 0 0 1 0 0 1
I0 I1 I2 I3 I4 I5 I6 O0 O1 O2 O3 O4 O5 O6
KESIMPULAN DAN SARAN
Kesimpulan
1. NE555 mampu menghasilkan pulsa yang stabil pada kondisi arus + 5V
dengan rentang 1 pulsa per 0,5 detik.
2. IC 74LS76 tidak mampu menjalankan fungsi sebagai switch karena
kesensitifannya terhadap perubahan tegangan dan kurang daya. Kisaran kinerja daya pada IC mikrokontroler adalah 50 mA – 150 mA. Daya ini tidak mencukupi untuk dipasangkan switch secara paralel.
Ketidak-mampuan IC mengangkat komponen di rangkaian sistem switch menyebabkan IC jebol dan rangkaian tidak bekerja sama sekali.
3. Transistor SCR C106DG digunakan sebagai pengganti 74LS76 karena memiliki range daya yang besar, antara 1,5 A – 3 A. Oleh karena itu, transistor inilah yang digunakan untuk dijadikan switch timer.
4. Dari simulasi didapat gambaran sistem secara keseluruhan dan dicapai waktu sesuai dengan nilai referensi yang dikehendaki.
5. Pengendalian kecepatan putaran dan besaran api yang berhasil dikendalikan dengan rangkaian digital meningkatkan potensi efektifitas dan efisiensi alat karena meminilisir tenaga yang terbuang selama proses
produksi berlangsung.
6. Rangkaian arus lemah mampu mengendalikan arus kuat
Saran
1. Perlu dilakukan pengujian efektifitas kinerja alat lebih lanjut, terutama pada pemilihan