1
Perancangan On-Board Data Handling Untuk
Roket EDF (Electric Ducted Fan)
Agus Mulyana1), Lutfi Abdussalam Al Faiz2)
1,2)
Jurusan Sistem Komputer, Fakultas Teknik dan Ilmu komputer, Universitas Komputer Indonesia
1)
[email protected], 2)[email protected]
ABSTRAK
Roket EDF (Electric Ducted Fan) untuk melakukan peluncuran memerlukan sistem pemantauan, pelacakan dan pengendalian agar roket tersebut dapat meluncur dengan baik. Salah satu komponen penting pada roket tersebut adalah OBDH (On-Board Data Handling) yang berfungsi sebagai media untuk melakukan perintah dan pengolahan data. Namun, diperlukan adanya TTC (Telemetry, Tracking, and Command) yang berguna untuk melakukan komunikasi antara GCS (Ground Control Station) dengan OBDH pada roket EDF.
Pada perancangan OBDH terintegrasi pengendali yaitu mikrokontroler, untuk mengetahui perilaku roket digunakan sensor IMU (Inertial Measurement Unit) yang di dalamnya terdiri dari sensor giroskop 3-sumbu dan Akselerometer 3-sumbu. Untuk melakukan tracking digunakan GPS, sensor kompas sebagai penentu arah hadap roket serta sebagai sudut referensi pada sumbu-z hasil pengolahan sensor giroskop dan digunakan sensor barometer untuk mengukur ketinggian roket pada saat meluncur. Data tersebut dapat diketahui secara real-time dengan mengirimkan data melalui modul radio pada frekuensi 2,4 GHz menggunakan XBee-Pro S2B kepada GCS.
Kata Kunci :OBDH, Roket EDF, Sensor IMU, GPS, XBee-Pro S2B, GCS
1. PENDAHULUAN
1.1 Latar Belakang
Teknologi roket dan antariksa adalah salah satu sasaran teknologi unggulan bagi negara-negara di dunia ini untuk mendapatkan predikat sebagai negara maju. Tidak dipungkiri, suatu negara yang mampu menguasai teknologi ini akan disegani dalam percaturan politik dunia. Indonesia sebagai negara kepulauan yang besar dan luas sudah sepatutnya memiliki kemandirian dalam penguasaan teknologi roket dan antariksa. Oleh sebab itu diperlukan upaya yang terus menerus untuk mewujudkan kemandirian ini, salah satunya melalui usaha menumbuh kembangkan rasa cinta teknologi dirgantara, khususnya teknologi peroketan sejak dini.
Pentinganya perkembangan teknologi roket, maka kita harus mempunyai kemauan dan kemampuan untuk meneliti bidang teknologi peroketan, baik teknologi muatan roket maupun roket itu sendiri. Mulai dari mendesain, membuat, menguji fungsional sampai dengan melaksanakan uji terbang. Melalui pemahaman perilaku roket, baik roket RUM maupun roket EDF.
Adapun, pada penelitian ini akan memfokuskan Pada pembuatan sistem Pemantauan, pengolahan data prilaku roket dan Pengendalian Roket EDF secara OBDH (
On-Board Data Handling). OBDH memiliki fungsi
untuk melakukan perintah dan pengolahan data
yang ada pada roket melalui TTC ( Telemetri,
Tracking and Command).
1.2 Tujuan
Tujuan dari pembuatan roket EDF ini adalah sebagai berikut:
1. Merancang sistem OBDH yang berisi sistem pengukuran data (sensor), pemrosesan data (mikroprosesor), komunikasi data (radio frekuensi), dan catu daya (baterai).
2. Dengan OBDH ditujukan agar dapat melakukan telemetry, telecommand, dan
tracking.
3. Membangun Perangkat lunak Ground
Control Station Menggunakan aplikasi
Microsoft 2010 dengan kemampuan: Dapat berkomunikasi dengan sistem
OBDH pada roket EDF.
Dapat menampilkan data hasil pengukuran OBDH dalam format angka maupun grafik.
2. TEORI PENUNJANG
2.1 OBDH (On-Board Data Handling)
2
mikrokontroller. Fungsi OBDH memiliki dua fungsi utama. Fungsi pertama adalah menerima, memvalidasi, mendekode, dan menyalurkan perintah ke sub-sistem roket lainnya. Fungsi kedua mengumpulkan, memproses dan mengatur dari kerja dan setatus dari OBDH. Selain itu, OBDH pada umumnya memiliki tambahan fungsi, seperti ketepatan waktu, monitoring
(watchdog), dan antarmuka keamanan.
Ukuran dari subsistem OBDH biasanya berbanding lurus terhadap komplekstisitas serta fungsi sistem yang ingin dibuat. Semakin banyak sistem dan fungsi yang ingin digunakan, maka semakin banyak komponen yang dibutuhkan pada OBDH. Selain itu, untuk membuat sub-sistem OBDH semakin realiable, ukuran OBDH bisa diperbesar dan ditambahkan beberapa peripheral yang dapat mendukung stabiltas OBDH.
2.2 Roket EDF (Electric Ducted Fan)
Roket EDF ini merupakan salah satu teknologi roket dengan mengganti bahan bakar dengan menggunakan sistem motor elektrik sebagai pendorong.
2.3 ARM (Advanced RISC Machines)
ARM adalah arsitektur prosesor 32bit dengan set instruksi RISC (Reduced Instruction
Set Computer) yang dikembangkan oleh ARM
Holdings.
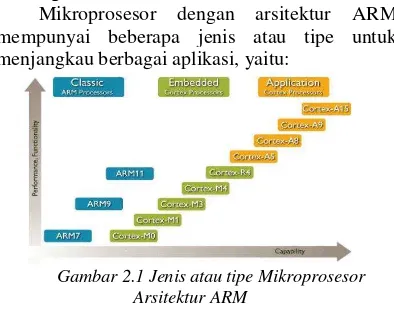
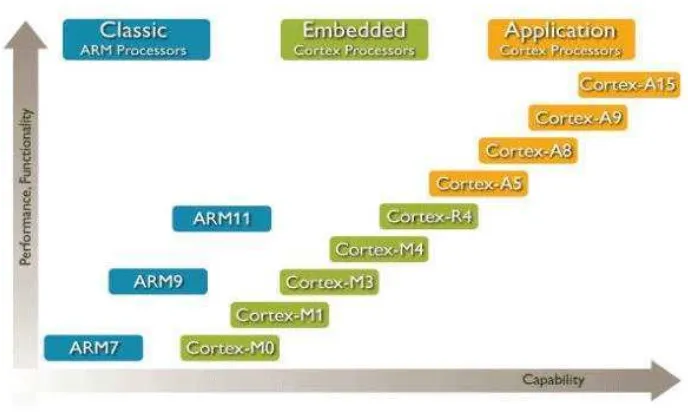
Mikroprosesor dengan arsitektur ARM mempunyai beberapa jenis atau tipe untuk menjangkau berbagai aplikasi, yaitu:
Gambar 2.1 Jenis atau tipe Mikroprosesor Arsitektur ARM
2.4 Mikroprosesor ARM Cortex M4
ARM prosesor Cortex-M4 adalah prosesor berdaya rendah yang memiliki low gate count,
low interrupt latency, dan low-cost debug.
Cortex-M4F adalah prosesor dengan kemampuan yang sama seperti prosesor Cortex-M4, dan terdapat fungsi aritmatika floatingpoint. Prosesor ini ditujukan untuk aplikasi yang memerlukan fungsi pemrosesan sinyal digital. ARM prosesor Cortex-M4 mengimplementasikan profil arsitektur ARMv7-M.
2.5 Sensor IMU
Sensor IMU (Inertial Measurement Unit) adalah perangkat elektronika yang mampu mengukur dan melaporkan kecepatan, orientasi, dan gaya grafitasi menggunakan kombinasi dari
sensor akselerometer dan giroskop. Namun terkadang menggunakan sensor magnetometer dan barometer untuk fungsi yang lainnya.
Berikut ini penjelasan jenis perangkat sensor IMU:
1. Akselerometer
Akselerometer adalah alat yang digunakan untuk mengukur percepatan, mendeteksi dan mengukur getaran (vibrasi), dan mengukur percepatan akibat gravitasi
Gambar 2.2 Ilustrasi Pembacaan Sensor Akselrometer
Keterangan Gambar 2.2 :
+1g, posisi diam sensor searah dengan arah vertikal bumi dan menghadap ke atas.
0g, posisi diam sensor searah dengan arah horizontal bumi.
Sensor akselerometer juga dapat digunakan untuk mengukur sudut kemiringan suatu benda apabila dalam keadaan statis. Sudut kemiringan dapat dihitung dari percepatan dengan menggunakan persamaan berikut ini:
x = tan-1 (
) ………2.1
y = tan-1 (
) ………2.2
2. Giroskop
Giroskop adalah perangkat yang berfungsi untuk mengukur kecepatan sudut atau mempertahankan gerak rotasi. Satuan kecepatan sudut yang diukur dalam derajat per detik (°/s).
Dengan memanfaatkan data kecepatan sudut tersebut dapat diketahui sudut (roll, pitch, yaw) suatu benda. Untuk mengetahui nilai sudut, data kecepatan sudut harus terintegrasi. Persamaannya adalah berikut ini:
adapun persamaan matematis yang aplikasikan pada mikrokontroler adalah sebagai beriku:
( x,y,z)tn = * T+ ( x,y,z)tn-1 …2.5
3
3. Magnetometer
Magnetometer adalah peralatan elektronik yang berguna untuk mengukur kekuatan dari medan magnet. Adanya medan magnet bumi yang berasal dari utara membuat sensor magnetometer dapat digunakan untuk mengukur sudut terhadap arah-arah utara bumi. persamaan untuk mengetahui nilai kompas adalah sebagai berikut:
sudut(θ) = arcTAN(
) ……..…………...2.6
Dimana :
MagX = nilai keluaran magnetometer sumbu X MagY = nilai keluaran magnetometer sumbu Y Sudut (θ) = sudut yang didapat hasil pemanfaatan
sensor magnetometer (derajat) 4. Barometer
Barometer adalah sensor untuk mengukur tekanan udara dengan nilai output berupa satuan Pa (pascal). Dengan memanfaatkan tekanan udara, maka sensor ini juga dapat mengukur ketinggian (Altimeter).
Persamaan mengukur ketinggian menggunakan sensor barometer adalah sebagai berikut:
………2.7 Dimana :
p = tekanan (Pa)
p0 = sea level standard atmospheric pressure
(101325Pa)
altitude = nilai ketinggian (mdpl)
3. PERANCANGAN
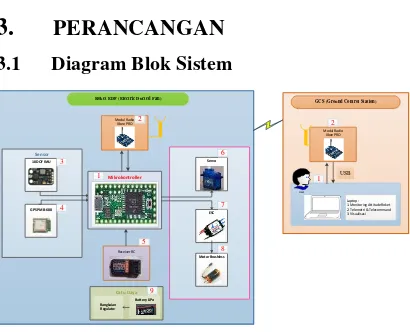
3.1 Diagram Blok Sistem
Roket EDF (Electric Ducted Fan)
Sensor
Gambar 3.1 Digram Blok Sistem
Berikut ini Penjelasan masing-masing Blok: 1. Teensy 3.1
Mikrokontroler Teensy berfungsi sebagai pemroses data sensor IMU dan GPS Selain itu, mikrokontroler juga digunakan untuk memproses perintah yang diberikan oleh GCS.
2. Modem Radio XBee-PRO S2B
Modem radio ini berfungsi sebagai Media transmisi pengiriman dan penerimaan data.
3. Modul 10 Dof IMU
Modul ini digunakan sebagai pengukur percepatan, kecepatan sudut, kompas, dan ketinggian. Nilai keluaran sensor akan diproses oleh mikrokontroler kemudian datanya dikirim kepada GCS.
4. Modul GPS Ublox NEO-6
Modul GPS ini digunakan untuk menentukan posisi roket dan juga digunakan untuk
tracking.
5. Receiver RC (RemoteControl)
Receiver RC berfungsi sebagai penerima sinyal PPM (Pulse Position Modulation) dari
remote control.
6. Motor Servo
Pada perancangan OBDH servo berfungsi sebagai pemicu parasut ketika roket terjadi separasi.
7. ESC (Electronic Speed Control)
ESC (Elektronic Speed Control) berfungsi sebagai pengatur kecepatan motor brushless, selain itu juga berfungsi untuk menaikan jumlah arus yang diperlukan oleh motor. Kecepatan untuk motor yang keluar dari ESC diatur melalui pulsa dari mikrokontroler. 8. Motor Brushless
Agar Roket dapat meluncur tinggi maka penulis menggunakan motor yang mempunyai
torque yang besar, salah satu motor yang
mempunyai torque yang besar adalah Motor
Brushless.
9. Catu Daya
Catu daya yang digunakan pada perancangan OBDH roket EDF ini adalah baterai Lithium
Polymer (LiPo). Baterai yang digunakan
memiliki tegangan 11,1 Volt dan arus sebesar 1300 mAh. Catu daya ini berfungsi sebagai sumber tegangan untuk mensuplai tenaga ke semua perangkat yang ada pada roket EDF
3.2 Perancangan Perangkat Keras
Berikut ini tampilan Desain perangkat keras OBDH yang dibuat dengan ukuran diameternya adalah 80mm.
Gambar 3.2 Desain Perangkat keras OBDH
3.3 Perancangan Perangkat Lunak
4
setiap perancangan sistem kendali. Sehingga alat yang dibuat dapat berfungsi dengan baik dan benar. Berikut ini algoritma dalam bentuk diagram alir.
Gambar 3.3 Diagram Alir Program Master
Mulai
Menghitung nilai giroskop sumbu x,y,z(deg/s)
ω = ((raw_data-nilai_offset)/14.375)
Menghitung kemiringan dari sensor pecepatan
θX = atan2(AccX,AccZ)
θY = atan2(AccY,AccZ)
Mengukur nilai ketinggian (m) Ketinggian=(44330*(1-pangkat(tekanan/
101325) , 0.1903)) + ketinggian_offset
mendapatkan Data GPS longitude, latitude dan altitude Kontrol Motor EDF dan Servo (untuk
separasi)
Menghitung kemiringan dari sensor giroskop rollGyro = rollGyro + GyroX * timeStep pitchGyro = pitchGyro + GyroX * timeStep.
Baca Data Mentah sensor Percepatan
Baca Data Mentah sensor Giroskop
Menghitung nilai percepatan sumbu x,y,z(m/s^2)
ω = ((raw_data-nilai_offset)*9.8/Sensitifitas)
23 mikrokontroler. Mikrokontroler berfungsi melakukan pengolahan data sensor , menunggu
command dari Ground Control Station (GCS)
untuk mengaktifkan telemetri, dan mengaktifkan motor EDF. Setelah perintah command diterima oleh perangka keras OBDH maka akan membaca sensor akselerometer, giroskop, magnetometer, barometer, dan GPS. Kemudian data tersebut dikirim ke GCS untuk ditampilan datanya secara
real-time dalam bentuk angka dan grafik.
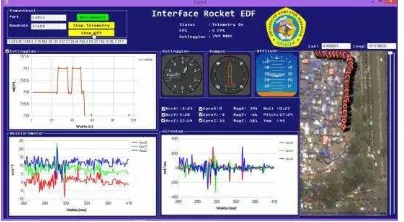
3.4 Perancangan GCS
GCS digunakan untuk melakukan
telecommand, telemetri, tracking GPS,
mengaktifkan motor EDF dan menampilan data sensor dalam bentuk angka dan grafik. Pada perancangan GCS ini menggunakan Microsoft Visual Studio 2010. GCS yang ditampilkan adalah sebagai berikut:
Gambar 3.4 GCS roket EDF
4. PENGUJIAN SISTEM
Pengujian bertujuan untuk mengukur keberhasilan dari sistem yang dibuat dari perangkat keras dan perangkat lunak. Sehingga hasilnya dapat dicapai dengan baik. Pengujian dilakukan dengan beberapa tahap mulai dari uji fungsionalitas sampai uji peluncuran.
4.1 Radio Komunikasi
Pengujian ini bertujuan untuk mengukur seberapa jauh jarak komunikasi yang didapat dari modul radio yang digunakan.
Tabel 4.1 pengujian radio XBee-Pro ZB (S2B)
No Jarak
Berdasarkan Tabel 4.1 menunjukan hasil pengujian menggunakan modul radio komunikasi XBee-Pro ZB (S2B). Pada jarak 150 meter komunikasi terputus karena terhalang oleh pohon dan berada di dataran rendah. Akan tetapi setelah melewati pohon dan berada di dataran tinggi komunikasi terhubung kembali sampai jarak 300 meter.
4.2 Pengujian untuk membandingkan Mikroprosesor32 bit dengan 8 bit
Pengujian ini dilakukan untuk membandingkan kecepatan eksekusi mikroprosesor 32 bit dengan 8 bit pada satu looping program menggunakan arduino IDE. Pada mikroprosesor 32 bit menggunakan ARM CortexM4 tipe MK20DX256VLH7 dengan kecepatan clock
72MHz, sedangkan mikroprosesor 8 bit menggunakan ATmega 2560 dengan kecepatan
clock 16MHz. Hasil pengujiannya dapat dilihat
pada Tabel4.2.
Tabel 4.2 Hasil Pengujian untuk membandingakan kecepatan eksekusi prosesor 32bit dengan 8bit
Waktu eksekusi ARM
Berdasarkan Tabel 4.2 menunjukan bahwa waktu eksekusi mikroprosessor 32 bit lebih cepat dibandingkan dengan mikroprosesor 8 bit.
4.3 Pengujian Fitur OBDH
5
Tabel4.3 Keuntungan dan kelemahan sistem dengan OBDH
No Keuntungan Kelemahan 1 Ukuran Kecil, namun
2 Mudah melakukan
troubleshooting
3 Dari kehandalan tidak sensitif terhadap noise karena langsung menggunakan jalur PCB.
4 Tidak membutuhkan banyak pengkabelan.
5 Integrasi lebih mudah, karena alokasi pin yang akan digunakan dan penempatan komponen sudah ditentukan.
Tabel4.4 Keuntungan dan kelemahan sistem tanpa OBDH
No Keuntungan Kelemahan 1 Jika terdapat kerusakan
pada suatu modul tidak akan merusak semua
- Sulit dalam melakukan integrasi modul
4.4 Pengujian Sensor Akselerometer
Persamaan yang digunakan untuk mendapatkan data akselerometer adalah sebagai berkut:
a(x,y,z) =
………4.1
Tabel4.5 Pengujian Sensor Akselerometer
ax ay az
Pengujian ini dilakukan dengan memposisikan sumbu z agar dapat mengukur nilai grafitasi bumi yaitu sebesar 1g ( ).
4.5 Pengujian Sensor Giroskop
Persamaan yang digunakan untuk mendapatkan data kecepatan sudut (◦/s) adalah sebagai berikut:
ω(x,y,z) = ………4.2
Tabel4.6 Pengujian Sensor Giroskop
ω x (◦/s) ω y (◦/s) ω z (◦/s)
Pengujian ini dilakukan pada kondisi sensor diam atau tidak bergerak. Sensor ini dalam keadaan diam akan menunjukan nilai 0 ◦/s. Pada data tersebut masih terdapat random noise. Maka diperlukan filter untuk mengurangi atau menghilangkan noise tersebut.
4.6 Pengujian sensor magnetometer untuk mendapatkan data kompas
Dalam analisa pengujian sensor ini, dilakukan perbandingan nilai kompas yang diperoleh dari sensor HMC5883L dengan kompas analog. Sensor kompas ini digunakan untuk menentukan arah hadap roket dan sebagai sudut referensi pada sumbu z hasil pengolahan sensor giroskop.
Tabel4.7 Pengujian Sensor Magnetometer Untuk mendapatkan data kompas
Persamaan yang digunakan untuk mengetahui persentase error adalah sebagai berikut:
Error = ABS (
) x 100 …4.3
Keterangan:
ABS : Fungsi Absolute
Sudut(hmc5883l) : Sudut yang dihasilkan sensor magnetometer
6
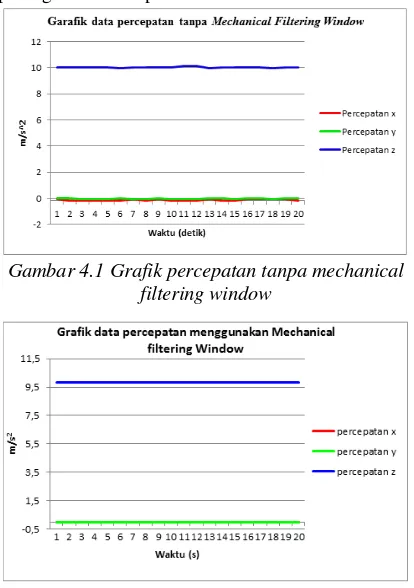
4.7 Pengujian Mechanical Filtering Window
Mechanical Filtering Window ini diterapkan
pada data percepatan dan kecepatan sudut saja. Tujuannya adalah agar noise dari data percepatan dan kecepatan sudut yang muncul pada saat perangkat diam dapat difilter.
Gambar 4.1Grafik percepatan tanpa mechanical
filtering window
Gambar 4.2 Grafik percepatan menggunakan mechanical filtering window
Berdasarkan Gambar 4.2 dapat dilihat bahwa dengan menggunakan Mechanical Filtering
Window dapat mengatasi data error pada perangkat
OBDH dalam keadaan diam (tidak bergerak) yang diakibatkan getaran yang sangat kecil, mechanical
noise atau kurang tepatnya dalam menentukan nilai
offset.
Gambar4.3 Grafik Kecepatan sudut tanpa mechanical filtering window
Gambar4.4 Grafik Kecepatan sudut menggunakan mechanical filtering window
Berdasarkan Gambar4.4 Setelah digunakan
Mechanical Filtering Window perubahan kecil
pada data kecepatan sudut yang muncul pada saat perangkat OBDH dalam keaadaan statis telah berhasil difilter.
4.8 Pengujian Telemetri data GPS (Altitude, Latitude dan longitude)
Pengujian GPS dilakukan untuk memastikan bahwa GPS telah bekerja dengan baik, karena hal ini akan mempengaruhi pada pergerakan roket, karena jika pembacaan data dari GPS error maka pergerakan roket tidak dapat diketahui posisinya dengan benar. Data hasil dari pengujian GPS adalah sebagai berikut:
Tabel4.8 Pengujian GPS
No Lokasi Altitude Latitude Longitude 1 Dipatiukur 792 -6,8866901 107,6156616 2 Dipatiukur 792 -6,8866901 107,6156616 5 Gasibu 750 -6,9000001 107,6187363 6 Gasibu 750 -6,9000001 107,6187363 9 Ledeng 1008 -6,8543901 107,6045914 10 Ledeng 1008 -6,8543901 107,6045914
4.9 Pengujian sensor Barometer
Pengujian sensor ini digunakan untuk mengukur ketinggian pada saat roket meluncur.
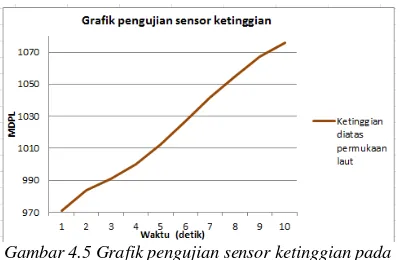
Tabel 4.9 pengujian sensor ketinggian pada saat roket meluncur
7
Gambar 4.5 Grafik pengujian sensor ketinggian pada saat roket meluncur
Pada Tabel 4.9 dan Gambar 4.5 didapat hasil pengujian sensor ketinggian pada saat roket meluncur. Waktu Peluncuran roket adalah 10 detik dan pada detik ke-10 ketinggian roket mencapai 1076 meter diatas permukaan laut atau sekitar 106 meter. Dengan demikian sensor ketinggian dapat berfungsi dengan benar.
5. KESIMPULAN DAN SARAN
Berdasarkan pembahasan pada bab-bab sebelumnya, maka pada perancangan OBDH pada Roket EDF (Electric Ducted Fan) ini dapat diambil beberapa kesimpulan sebagai berikut:
1. Hasil rancang OBDH (On-Board Data
Handling) memuat sistem catu daya, sensor,
mikrokontroler dan komunikasi (radio frekuensi) telah berhasil dirancang. Dan Perangkat Keras OBDH telah berhasil melakukan telemetri, telecommand dan tracking
GPS. Hal ini berdasarkan hasil uji peluncuran dimana data dapat diterima dengan baik pada aplikasi GCS.
2. Jarak maksimal pengiriman data menggunakan modul radio XBee-Pro ZB (S2B) diruang terbuka (tanpa halangan) menggunakan baudrate 57600 adalah 300 meter.
3. Dikarenakan terdapat sensor yang sensitif terhadap magnet. Maka penempatan sensor harus jauh dari benda yang mengandung magnet minimal 15cm.
4. Dengan menggunakan Mechanical Filtering
Window dapat mendeskriminasi nilai error kecil
yang timbul pada saat benda dalam keadaan diam. Error yang muncul pada saat Perangkat keras OBDH dalam keadaan diam tersebut 99% berhasil dihilangkan.
5. Berdasarkan pengujian kecepatan waktu eksekusi program pada satu kali looping,
menggunakan mikroprosesor 32 bit lebih cepat dibandingkan dengan mikroprosesor 8 bit. 6. Berdasarkan pengujian fitur, penggunaan sistem
OBDH lebih mudah dan kehandalannya lebih baik dibandingkan dengan sistem tanpa OBDH.
Sedangkan saran untuk pengembangan OBDH pada Roket EDF (Electric Ducted Fan) ini adalah sebagai berikut:
1. Menggunakan metode pemrograman RTOS. 2. Dilengkapi dengan program kontrol PID
untuk kesetabilan roket pada saat meluncur. 3. OBDH dilengkapi Real-timeclock (RTC) dan
OpenLog.
DAFTAR PUSTAKA
[1] Bayle Julien, 2013, C Programing for
Arduino, Birmingham B3 2PB
[2] Kurt Seifert and Oscar Camacho,
Implementing Positioning Algorithms Using
Accelerometers. 2007.
[3] Renaldi Ripharbowo, Mohammad Gavin, Perancangan Hardware & Software On-Board Data Handling UI-SAT dengan Prosesor LPC1768 ARM Cortex M-3, 2012.
[4] Tuck, Kimberly, Implementing Auto-Zero Calibration Technique For Accelerometers
Freescale Semiconductor Aplication Note,
2007.
[5] 10 DOF Sensor (SKU:SEN0140) http://www.dfrobot.com/wiki/index.php/10_D OF_Sensor_(SKU:SEN0140).
[6] ARM ltd, Cortex-M4Prosessor, diakses pada http://infocenter.arm.com/help/index.jsp tanggal 4 Januari 2015.
[7] Caspersen Gert, Onboard Data Handling.
Diakses pada
http://www.space.aau.dk/cubesat/documents/ Onboard_Data_Handling.pdf tanggal 15 November 2014.
[8] Daniel Widyanto, Mengenal ARM CortexM0, diakses pada http://www.kelas-
mikrokontrol.com/e- learning/mikrokontroler/mengenal-arm-cortex%C2%ADm0.html tanggal 4 Januari 2015.
[9] Kong Wai Weng, Measuring Titl Angle With
Gyro and Accelerometer. 2009 diakses pada
http://tutorial.cytron.com.my/2012/01/10/mea
suring-tilt-angle-with-gyro-and-accelerometer/ tanggal 20 Februari 2015.
[10] HobyLogs, Arduino With MPU6050 and
Angle Calculation, 2014 diakses pada
PERANCANGAN ON-BOARD DATA HANDLING UNTUK
ROKET EDF (ELECTRIC DUCTED FAN)
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada
Program Studi Strata Satu Sistem Komputer di Jurusan Teknik Komputer
Oleh
Lutfi Abdussalam Al Faiz
10210108
Pembimbing
Agus Mulyana, M.T
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
iii
KATA PENGANTAR
Segala puji bagi Allah SWT, karena rahmat, taufiq, serta Hidayah-Nya sehingga penulis dapat menyelesaikan Tugas akhir ini, meskipun proses belajar sesungguhnya tak akan pernah berhenti.
Laporan Tugas Akhir ini disusun untuk memenuhi syarat kelulusan pada Program Studi Sistem Komputer S-1 di Jurusan Teknik Komputer. Judul
penelitian tugas akhir ini adalah “Perancangan On-Board Data Handling Untuk Roket EDF (Electric Ducted Fan)”
Tugas Akhir ini Sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana tanpa bantuan banyak pihak yang tak mungkin penulis sebutkan satu persatu, namun dengan segala kerendahan hati, penulis mengucapkan terima kasih kepada:
1. Ibu, adik dan keluarga yang selalu mendoakan, memberi motivasi dan bantuan dalam penyelesaian Tugas Akhir ini.
2. Dr. Ir Eddy Soeryanto Soegoto M.Sc. selaku Rektor Universitas Komputer Indonesia
3. Prof. Dr. H. Denny Kurniadie, Ir., M.Sc. selaku Dekan Fakultas Teknik dan Ilmu Komputer
4. Dr. Wendi Zarman, M.Si selaku ketua jurusan Teknik Komputer 5. Dosen Pembimbing, Agus Mulyana, M.T yang selalu memberikan
arahan, motivasi dan bantuan dari awal sampai selesai Tugas Akhir ini.
6. Dipl.Ing Endri Rachman selaku ketua Divisi Roket dan Unmanned System yang telah memberi motivasi dan kesempatan untuk berkarya di divisi dan melakukan penelitian.
7. Selvia Lorena Br Ginting, S.Si, M.T selaku dosen wali. Terima kasih atas bimbingannya selama penulis menjalani masa perkuliahan. 8. Seluruh dosen dan staf pengajar jurusan Teknik Komputer yang
telah memberikan bekal ilmu kepada penulis.
iv
10.Seluruh mahasiswa Teknik Komputer khususnya 10 TK3 dan 10 TK4 yang selalu memberikan semangat dalam menghadapi segala masalah perkuliahan dan berjuang sampai akhir.
11.Teman-teman di Unikom yang tidak dapat disebutkan satu persatu 12.Seluruh pihak yang mungkin terlupakan oleh penulis, namun telah
membantu penulis. Terimakasih sebanyak-banyaknya.
Akhirnya, penulis berharap semoga penelitian ini menjadi sumbangsih yang bermanfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin keilmuan yang penulis dalami.
Bandung, 3 Maret 2015
Lutfi Abdussalam AL Faiz
DAFTAR ISI
ABSTRAK...i
ABSTRACT...ii
KATA PENGANTAR...iii
DAFTAR ISI...v
DAFTAR TABEL...ix
DAFTAR GAMBAR...xi
DAFTAR ISTILAH...xiv
BAB I PENDAHULUAN...1
1.1 Latar Belakang...1
1.2 Rumusan Masalah...2
1.3 Maksud dan Tujuan...2
1.4 Batasan Masalah...3
1.5 Metode Penelitian...4
1.6 Sistematika Penulisan...5
BAB II TEORI PENUNJANG...7
2.1 OBDH (On-Board Data Handling)...7
2.2 TTC (Telemetry, Tracking And Command)...7
2.2.1 Radio Frekuensi...8
2.2.2 TNC (Terminal Node Controller)...8
2.3 Komunikasi Data...8
2.3.1 Komponen Komunikasi Data...8
2.3.2 Metode Transmisi...9
2.3.3 Komunikasi I2C (Inter Integrated Circuit)...10
2.3.4 USB Komunikasi Serial...11
2.4 Perangkat Keras...13
2.4.1 ARM (Advanced RISC Machines)...13
2.4.2 Mikroprosesor ARM Cortex M4...16
2.4.3 Sensor IMU...16
2.4.4 GPS (Global Positioning System)...20
2.5 Perangkat Lunak dan Aplikasi...21
2.5.1 Microsoft Visual Studio 2010...21
2.5.2 Arduino IDE...22
2.5.3 Aplikasi “XCTU.exe”...24
BAB III PERANCANGAN SISTEM...27
3.1 Rancangan Mekanik...39
3.2 Rancangan Perangkat Keras...39
3.2.1 Rangkaian Perangkat Keras OBDH untuk Roket EDF...39
3.2.2 Desain Penempatan Komponen pada Perangkat Keras OBDH.40 3.2.3 Pin I/O yang dipakai dan Deskripksinya...41
3.2.4 Modul 10 DOF IMU...42
3.2.5 GPS (Global Positioning System)...43
3.2.6 Modul Komunikasi RF XBee-PRO S2B...43
3.2.7 Modul Komunikasi Data RF Pada Ground Station...44
3.3 Rancangan Perangkat Lunak...45
3.3.1 Algoritma Program utama...45
3.3.2 Prosedur Algoritma I2C...47
3.3.3 Prosedur Mengukur Data Mentah Sensor...48
3.3.4 Prosedur Baca Data Kompas...49
3.3.5 Prosedur Data Longitude, Latitude dan Altitude GPS...50
3.3.6 Prosedur Menghitung Nilai Ketinggian...52
3.3.7 Prosedur MechanicalFilteringWindow pada data percepatan..53
3.3.8 Ground Control Station (GCS)...55
3.3.9 Format Data...57
BAB IV HASIL PENGUJIAN DAN ANALISA...58
4.1 Pengujian Radio Komunikasi...58
4.2 Pengujian untuk membandingkan Mikroprosesor 32 bit dengan 8 bit..59
4.3 Pengujian Fitur OBDH...60
4.4 Pengujian Terpisah...61
4.4.1 Pengujian Sensor Akselerometer di Laboratorium...61
4.4.2 Pengujian sensor kecepatan sudut / kecepatan putar di Laboratorium...62
4.4.3 Pengujian sensor magnetometer Laboratorium...64
4.4.4 Analisa data kompas dari hasil pengujian di Laboratorium...65
4.4.5 Pengujian Mechanical Filtering Window...67
4.5 Pengujian Komunikasi Perangkat Ground Control Station...75
4.5.1 Pengujian Telecommand dan Telemetri...75
4.5.2 Pengujian Tracking...76
4.5.3 Pengujian Telemetri pada Sensor Giroskop di Laboratorium....76
4.5.4 Pengujian Telemetri data GPS (Altitude, latitude, longitude). . .79
4.5.5 Pengujian Terintegrasi di Laboratorium...79
4.5.6 Pengujian Telemetri Sensor Barometer ketika roket meluncur. 82 4.5.7 Pengujian Telemetri Sensor Akselerometer pada Saat Roket Meluncur...83
4.5.8 Pengujian Telemetri Prilaku roket (Roll, Pitch dan Yaw)...84
BAB V KESIMPULAN DAN SARAN...87
5.1 Kesimpulan...87
5.2 Saran...88
DAFTAR PUSTAKA...89
ii
ABSTRACT
EDF (Electric ducted fan) Rocket to launch need monitoring system, tracking and control so that the rocket can glide well. One of the important components of the rocket is OBDH (On-Board Data Handling) which functions as a media to carry out the command and data processing. However, needed TTC (Telemetry, Tracking, and Command) which is useful for communication between GCS (Ground Control Station) with OBDH on the EDF rocket.
In designing an OBDH integrated controller is a microcontroller, to know the attitude of the rocket used IMU (Inertial Measurement Unit) sensor which consists of a 3-axis gyroscope sensor and 3-axis accelerometer. To perform tracking used GPS, compass sensor for direction toward the rocket, and as the reference angle on the z-axis gyroscope sensor result of processing and barometer sensors used to measure the altitude of the rocket at launch. The data can be known in real-time by sending data via radio module at a frequency of 2.4 GHz using the XBee-Pro S2B to GCS.
i
ABSTRAK
Roket EDF (Electric Ducted Fan) untuk melakukan peluncuran memerlukan sistem pemantauan, pelacakan dan pengendalian agar roket tersebut dapat meluncur dengan baik. Salah satu komponen penting pada roket adalah OBDH (On-Board Data Handling) yang berfungsi sebagai media untuk melakukan perintah dan pengolahan data. Namun, diperlukan adanya TTC (Telemetry, Tracking, andCommand) yang berguna untuk melakukan komunikasi antara GCS (Ground Control Station) dengan OBDH pada roket EDF.
Pada perancangan OBDH terintegrasi pengendali yaitu mikrokontroler, untuk mengetahui perilaku roket digunakan sensor IMU (Inertial Measurement Unit) yang di dalamnya terdiri dari sensor giroskop 3 sumbu dan Akselerometer 3 sumbu, untuk melakukan tracking digunakan GPS, sensor kompas sebagai penentu arah hadap roket serta sebagai sudut referensi pada sumbu z hasil pengolahan sensor giroskop dan digunakan sensor barometer untuk mengukur ketinggian roket pada saat meluncur. Data tersebut dapat diketahui secara real-time dengan mengirimkan data melalui modul radio pada frekuensi 2,4 GHz menggunakan XBee-Pro S2B kepada GCS.
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Teknologi roket dan antariksa adalah salah satu sasaran teknologi unggulan bagi negara-negara di dunia ini untuk mendapatkan predikat sebagai negara maju. Tidak dipungkiri, suatu negara yang mampu menguasai teknologi ini akan disegani dalam percaturan politik dunia. Indonesia sebagai negara kepulauan yang besar dan luas sudah sepatutnya memiliki kemandirian dalam penguasaan teknologi roket dan antariksa. Oleh sebab itu diperlukan upaya yang terus menerus untuk mewujudkan kemandirian ini, salah satunya melalui usaha menumbuh kembangkan rasa cinta teknologi dirgantara, khususnya teknologi peroketan sejak dini.
Pentinganya perkembangan teknologi roket, maka kita harus mempunyai kemauan dan kemampuan untuk meneliti bidang teknologi peroketan, baik teknologi muatan roket maupun roket itu sendiri. Mulai dari mendesain, membuat, menguji fungsional sampai dengan melaksanakan uji terbang. Melalui pemahaman perilaku roket, baik roket RUM maupun roket EDF.
Roket RUM (Roket Uji Muatan) adalah jenis roket yang digunakan untuk melakukan pengujian muatan dan pendorong agar roket tersebut dapat meluncur yaitu dengan menggunakan bahan bakar. sedangkan Roket EDF ini merupakan salah satu teknologi roket dengan mengganti bahan bakar menjadi sistem elektronik sebagai pendorong. Pada Roket EDF akan dipasangkan beberapa sensor yang memiliki fungsi untuk memonitoring perilaku roket saat diluncurkan. Dan diharapkan Roket EDF ini dapat menjadi pijakan awal bagi bangsa indonesia untuk ikut dalam teknologi roket dunia.
2
dan pengolahan data yang ada pada roket melalui TTC ( Telemetri, Tracking and Command).
Pada OBDH terdapat perangkat keras dan perangkat lunak yang harus dirancang agar OBDH dapat berfungsi dengan baik. Perangkat keras yang dirancang apakah dapat berfungsi secara optimal tanpa kekurangan resources yang dibutuhkan. Dan dari sisi perangkat lunak, perangkat lunak harus dirancang agar OBDH dapat terkoneksi dan saling berkomunikasi, sehingga menunjang penanganan sistem roket tersebut. Perangkat lunak tersebut juga harus handal dan berfungsi secara optimal dalam mengangani penugasan yang dibebankan pada OBDH.
1.2 Rumusan Masalah
Rumusan masalah pada penelitian tugas akhir ini adalah:
1. Bagaimana merancang sistem OBDH yang dapat dimasukan pada batang tubuh roket dengan diameter roket +90mm dengan mengacu pada “Rule Book KOMURINDO 2014”
2. Bagaimana agar dapat melakukan telemetry, tracking and telecommand. 3. Bagaimana OBDH dapat terkoneksi dan saling berkomunikasi dengan
GCS (Ground Control Station) seacra Real-time.
4. Teknik pengiriman data sensor menggunakan modem radio. Dengan sistem pengiriman half-duplex sehingga harus dipikirkan bagaimana pengiriman perintah dari GCS dan pengiriman data sensor tidak saling bertabrakan.
1.3 Maksud dan Tujuan
3
dimaksudkan untuk memenuhi persyaratan untuk kelulusan jenjang studi S1. Adapun rincian dari tujuan tersebut adalah sebagai berikut:
1. Merancang sistem OBDH yang berisi sistem pengukuran data (sensor), pemroses data (mikroprosesor), komunikasi data (radio frekuensi), dan catu daya (baterai).
2. Dengan OBDH ditujukan dapat melakukan telemetry. tracking dan telecommand.
3. Membangun software GCS menggunakan aplikasi Microsoft Visual Studio 2010 dengan kemampuan:
Dapat berkomunikasi dengan mikrokontroler di roket EDF.
Dapat menampilkan data hasil pengukuran OBDH dalam format angka
maupun grafik.
1.4 Batasan Masalah
Batasan masalah pada penelitian tugas akhir ini adalah:
1. Perancang OBDH (On-Board Data Handling) ini meliputi perancangan dari perangkat keras dan perangkat lunak pada untuk roket EDF dengan melakukan interkoneksi dengan sistem telemetri dan telecommand.
2. Ukuran sistem OBDH diesesuaikan dengan diameter batang tubuh roket yaitu +90 mm.
3. Perancangan sistem masih dalam bentuk shield.
4. GCS menampilkan data yang hasil dari telemetri sikap roket dalam angka dan grfik.
5. Software GCS dirancang menggunakan bahasa pemrograman C# (See Sharp) untuk menampilkan angka dan grafik data sensor.
4
c. Kompas diproses dari data sensor magnetometer.
d. Ketinggian didapatkan dari hasil pemanfaatan sensor tekanan. e. Sudut roll, pitch dan yaw
f. GPS (Ketinggian, latitude, longitude).
7. Jenis protokol komunikasi yang digunakan antara sensor dan mikrokontroler adalah I2C (Inter Integrated Circuit).
8. Komunikasi radio yang digunakan adalah komunikasi half-duplex.
1.5 Metode Penelitian
Tahapan penelitian tugas akhir ini adalah sebagai berikut.:
1. Studi Literatur
Studi pustaka yang berkaitan dengan OBDH (On-board Data Handling), datasheet sensor serta manual mikrokontroler dan perangkat lunak Visual Studio 2010.
2. Pemilihan dan Pengadaan Komponen
Melakukan pengamatan dan memeriksa ketersediaan komponen dari segi biaya, dimensi, serta kinerja dari masing-masing komponen yang akan digunakan.
3. Pengujian Komponen
Pengujian secara terpisah untuk setiap komponen yang digunakan dalam pembuatan tugas akhir
4. Perancangan Perangkat Keras OBDH (On-board Data Handling)
Perancangan perangkat keras OBDH yang dapat memuat rangkaian catu daya, mikrokontroler, sensor-sensor, dan sistem transmisi.
5. Perancangan Perangkat Lunak
Perancangan Perangkat Lunak mikrokontroler untuk pembacaan data sensor dan pengiriman data ke GCS serta perancangan Perangkat Lunak GCS untuk menampilkan data hasil pengukuran sensor-sensor yang digunakan.
5
Uji Fungsi masing-masih sensor
Pengujian telemetri, telecomand, tracking data GPS
Uji Peluncuran pada KOMURINDO 2014
7. Pembuatan Laporan
Pembuatan laporan penelitian tugas akhir
1.6 Sistematika Penulisan
Sistematika penulisan Tugas Akhir ini adalah sebagai berikut:
BAB I : PENDAHULUAN
Pada bab ini diuraikan tentang latar belakang masalah, rumusan masalah, maksud dan tujuan, batasan masalah, metode penelitian, dan sistematika penulisan.
BAB II : TEORI PENUNJANG
Isi bab ini memaparkan teori penunjang atau dasar yang menjelaskan hal-hal yang berhubungan dengan judul tugas akhir.
BAB III : PERANCANGAN SISTEM
Pada bab ini menjelaskan blok diagram sistem OBDH ( On-Board Data Handling) dan sub sistem pendukungnya meliputi sensor IMU, magnetometer, tekanan udara dan GPS yang dibuat, perancangan perangkat keras, dan perancangan perangkat lunak.
BAB IV : HASIL PENGUJIAN DAN ANALISA
6
BAB V : KESIMPULAN DAN SARAN
7
BAB II
TEORI PENUNJANG
2.1 OBDH (On-Board Data Handling)
OBDH merupakan sistem yang lebih kecil dan dijadikan menjadi suatu kesatuan dari command and Data Handling pada satelit konvensional. OBDH adalah sebuah mikrokontroler yang mempunyai input, output dan sensor yang berguna menunjang fungsi OBDH. OBDH juga bisa dikatakan sebuah subsistem dalah hal ini adalah roket yang berfungsi sebagai antarmuka / penghubung antara subsistem lainya. Seperti komunikasi, dan sensor-sensor yang sudah terintegrasi dengan mikrokontroler. Fungsi OBDH memiliki dua fungsi utama. Fungsi pertama adalah menerima, memvalidasi, mendekode, dan menyalurkan perintah ke sub-sistem roket lainnya. Fungsi kedua mengumpulkan, memproses dan mengatur dari kerja dan setatus dari OBDH. Selain itu, OBDH pada umumnya memiliki tambahan fungsi, seperti ketepatan waktu, monitoring (watchdog), dan antarmuka keamanan.
Ukuran dari subsistem OBDH biasanya berbanding lurus terhadap komplekstisitas serta fungsi roket yang ingin dibuat. Semakin banyak sistem dan fungsi roket yang ingin digunakan, maka semakin banyak komponen yang dibutuhkan pada OBDH. Selain itu, untuk membuat sub-sistem OBDH semakin realiable, ukuran OBDH bisa diperbesar dan ditambahkan beberapa peripheral yang dapat mendukung stabiltas OBDH.
Bidang-bidang yang memerlukan OBDH diataranya adalah bidang antariksa pada perancangan satelit dan sistem kendali roket, bidang penerbangan pada perancangan autopilot, perancangan single copter, tricopter, quadcopter. Dan lain-lain.
2.2 TTC (Telemetry, Tracking And Command)
8
dikendaikan dari subsistem ini. Pada TTC terdapat dua blok penting, yaitu Radio Frekuensi dan Terminal Node Controller.
2.2.1 Radio Frekuensi
Untuk melakukan telemetri dan telecommand, maka diperlukan modul radio frekuensi. Adapun perancangannya yaitu Satu buah terpasang pada roket dan satu buah lagi sebagai GCS yang terhubung pada PC atau laptop.
2.2.2 TNC (Terminal Node Controller)
Terminal NodeController disini berfungsi sebagai penerima peritah dari OBDH, pemaketan data, encoder dan decoder dari bagian radio frekuensi, serta penerimaan dan pengiriman data dari GCS. Pada TNC juga terdapat encoder dan decoder perintah, apabila terjadi kegagalan atau kesalahan pengiriman antara OBDH dengan TNC
2.3 Komunikasi Data
2.3.1 Komponen Komunikasi Data
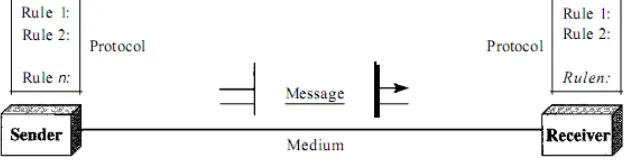
Gambar II.1 Diagram blok komunikasi data
Keterangan diagram blok komunikasi data:
a. Pesan (Message)
9
b. Pengirim (Sender)
Pengirim adalah perangkat yang mengirim pesan data. Miasalnya, komputer, workstation, handset telepon, kamera video, dan sebagainya. c. Penerima (Receiver)
Penerima adalah perangkat yang menerima pesan. Misalnya, komputer, workstation, handset telepon, televisi, dan sebagainya.
d. Media Transmisi
Media transmisi adalah jalur fisik dimana pesan berjalan dari pengirim ke penerima. Beberapa contoh media transmisi termasuk twisted-pair, kawat, kabel koaksial, kabel serat optik, dan gelombang radio.
e. Protokol
Protokol adalah seperangkat aturan yang mengatur komunikasi data. Ini merupakan kesepakatan antara perangkat untuk berkomunikasi.
2.3.2 Metode Transmisi
Berdasarkan aliran datanya komunikasi Antara dua perangkat terbagi atas tiga macam, yaitu:
1. Simplex
Simplex merupakan metode komunikasi data yang mengirimkan pesan hanya dalam satu arah. Hanya satu dari dua perangkat pada link yang dapat dikirimkan, yang lain hanya dapat menerima. Ilustrasi jenis komunikasi simplex dapat dilihat pada Gambar II.2.
Pengrim (TX) Penerima (RX)
Gambar II.2 Ilustrasi Komunikasi Simplex
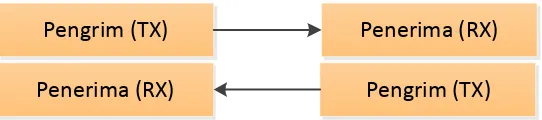
2. Half Duplex
10
yang mengirim, yang lain hanya dapat menerima, dan sebaliknya. Ilustrasinya tampak pada Gambar II.3.
Pengrim (TX) Penerima (RX)
Pengrim (TX) Penerima (RX)
Gambar II.3 Ilustrasi Komunikasi Half Duplex
3. Full Duplex
Metode Full Duplex, komunikasi data pada Kedua stasiun dapat mengirim dan menerima secara bersamaan. Ilustrasi jenis komunikasi full duplex adalah sebagai berikut
Pengrim (TX) Penerima (RX)
Pengrim (TX) Penerima (RX)
Gambar II.4 Ilustrasi Komunikasi full duplex
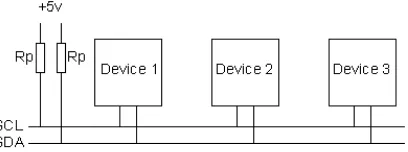
2.3.3 Komunikasi I2C (Inter Integrated Circuit)
I2C merupakan bus standar yang didesain oleh Philips pada awal tahun 1980an untuk memudahkan komunikasi antar komponen yang tersebar pada papan rangkaian. I2C merupakan singkatan dari Inter IC atau komunikasi antar IC, sering disebut juga IIC atau I2C. Pada awalnya, kecepatan komunikasi maksimumnya diatur pada 100kbps karena kecepatan tinggi belum dibutuhkan pada transmisi data. Untuk membutuhkan kecepatan tinggi pada transmisi data, sejak tahun 1998 terdapat dua mode yaitu 400kbps dan 3,4Mbps. I2C tidak hanya digunakan pada komponen yang terletak pada satu board, tetapi juga digunakan untuk mengkoneksikan komponen yang dihubungkan melalui kabel.
11
Fitur-fitur signifikan dari bus ini adalah :
Hanya 2 jalur/kabel yang dibutuhkan, yaitu SCL (Serial Clock) dan SDA (Serial Data)
Tidak ada aturan baudrate seperti pada RS232, di bus ini IC yang berperan
sebagai master akan mengeluarkan bus clock.
Hubungan master/slave berlaku antara komponen satu dengan yang lain,
setiap perangkat yang terhubung dengan bus mempunyai alamat unik yang diatur melalui perangkat lunak
IC yang berperan sebagai master mengontrol seluruh jalur komunikasi
dengan mengatur clock dan menentukan siapa yang menggunakan jalur komunikasi. Jadi IC yang berperan sebagai slave tidak akan mengirim data kalau tidak diperintah oleh Master.
I2C merupakan bus yang mendukung multi-master yang mempunyai
kemampuan arbitrasi dan pendeteksi tabrakan data.
Gambar II.5 Ilustrasi komunikasi Inter Integrated Circuit Bus (I2C)
2.3.4 USB Komunikasi Serial
Sinergi antara komputer dan komunikasi adalah jantung revolusi teknologi informasi saat ini. Sistem komputer modern tampaknya melibatkan berbagai variasi perangkat seperti keyboard, mikrofon, kamera, speaker dan perangkat display.
12
dan dengan tambahan kemampuan high-sped menjadikannya sebagai pilihan metode interkoneksi bagi sebagian besar perangkat komputer.
USB didesain untuk memenuhi beberapa tujuan utama:
Menyediakan sistem interkoneksi yang sederhana, low-cost, dan mudah
digunakan yang dapat megatasi kesulitan karena terbatasnya jumlah port I/O pada suatu komputer.
Mengakomodasi karakteristik transfer data skala luas untuk perangkat I/O
termasuk koneksi telepon dan internet.
Meningkatkan kenyamanan user melalui mode operasi plug-and-play.
USB beroperasi secara ketat pada basisi polling. Suatu perangkat mengirim pesanhanya sebagai respon terhadap pesan poll dari host. Karenanya pesan upstream tidak menghadapi konflik atau saling mengganggu satu dengan yang lain, sehingga tidak ada dua perangkat yang dapat mengirim pesan pada saat yang sama. Batasan ini memungkinkan Hub menjadi perangkat low-cost yang sederhana.
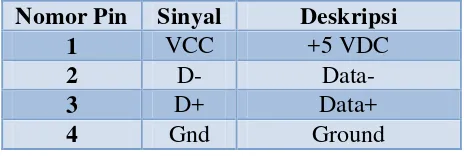
Semua informasi yang ditransfer melalui USB diatur didalam paket, dimana satu paket terdiri dari satu atau lebih byte informasi. Terdapat banyak tipe paket yang melakukan berbagai fungsi kontrol. Kita mengilustrasikan operasi USB dengan memberikan beberapa contoh tipe paket utama dan menunjukan bagaimana paket tersebut digunakan.
Standarisasi konfigurasi kabel pada USB adalah sebagai berikut:
Tabel II.1 Keterangan Typical USB Cable Connector
Nomor Pin Sinyal Deskripsi
1 VCC +5 VDC
2 D- Data-
3 D+ Data+
13
2.4 Perangkat Keras
Berikut ini merupakan penjelasan dasar teori dan datasheet dari perangkat-perangkat yang digunakan:
2.4.1 ARM (Advanced RISC Machines)
ARM adalah arsitektur prosesor 32bit dengan set instruksi RISC (Reduced Instruction Set Computer) yang dikembangkan oleh ARM Holdings. ARM merupakan singkatan dari Advanced RISC Machine (sebelumnya lebih dikenal dengan kepanjangan Acorn RISC Machine). Pada awalnya ARM prosesor dikembangkan untuk PC (Personal Computer) oleh Acorn Computers, sebelum dominasi Intel x86 prosesor Microsoft di IBM PC kompatibel menyebabkan Acorn Computers bangkrut.
Setelah Acorn Computers bangkrut, Apple Computers (sekarang Apple Inc) dan VLSI (Very Large Circuit Integrated) Technology Inc membeli kekayaan intelektual Acorn Computer, dan mendirikan ARM Ltd. ARM Ltd kemudian melanjutkan proyek Acorn Computer untuk mengembangkan prosesor 32bit dengan arsitektur RISC yang sederhana dan hemat energi.
Prosesor yang dikembangkan ARM Ltd ternyata tidak diminati oleh kalangan produsen PC, dengan alasan tidak kompatibel dengan arsitektur Intel x86. ARM Ltd kemudian memutuskan untuk tidak memproduksi ARM prosesor, tetapi melisensikan desain prosesor tersebut untuk digabungkan dengan ASIC (Application specific integrated circuit) yang membutuhkan kontroler embedded (contoh: kontroler printer, kontroler mesin cuci, kontroler video dekoder, kontroler ethernet hub/router, dan sebagainya).
14
Perusahaan yang dulu ataupun saat ini menggunakan lisensi ARM prosesor meliputi AlcatelLucent, Apple Inc., Atmel, Broadcom, Cirrus Logic, DEC (Digital Equipment Corporation), Freescale, Intel (melalui akuisisi DEC), LG, Marvell Technology Group, Microsoft, NEC, Nuvoton, Nvidia, NXP (dulu Philips), Oki, Qualcomm, Samsung, Sharp, STMicroelectronics, Symbios Logic, Texas Instruments, VLSI Technology, Yamaha and ZiiLABS. Berbagai macam kontroler berbasis ARM yang terkenal meliputi DEC StrongARM (digunakan Intel untuk prosesor PDA), Marvell Xscale, Nintendo (untuk prosesor Gameboy, DSi, dan 3DS), Nvidia Tegra, STEricsson Nomadik, Qualcomm Snapdragon, Texas Instruments OMAP product line, Samsung Hummingbird and Apple A4.
Setelah mengetahui penjelasan dan arsitektur ARM, kini saatnya mengenal berbagai jenis keluarga mikroprosesor ARM. Jenis dan tipe mikroprosesor ARM dapat dilihat pada Gambar II.7 , yaitu:
Gambar II.6 Jenis atau tipe mikroprosesor ARM
Jenis atau tipe mikroprosesor ARM dibagi menjadi 3 yaitu:
1. Classic ARM Processors
bertahun-15
tahun. Desainer produk elektronik yang memilih prosesor-prosesor ini dijamin mempunyai dukungan ekosistem dan sumber daya yang luas, tingkat kesulitan integrasi yang minimum, dan menurunkan waktu desain. Dalam ARM klasik terdiri dari ARM 7, ARM9, ARM 11.
2. Embedded Cortex Processors
Prosesor di keluarga seri Cortex-M telah dikembangkan khusus untuk domain mikrokontroler, dimana permintaan untuk kecepatan, determinasi waktu proses, dan manajemen interrupt bersama dengan jumlah gate silikon minimum (luas silikon yang minimum menentukan harga akhir prosesor) dan konsumsi daya yang minimum sangat diminati. Contoh aplikasi prosesor Cortex-M adalah mikrokontroller dan sensor cerdas.
Prosesor di keluarga seri Cortex-R, sebaliknya, dikembangkan khusus untuk keperluan realtime yang mendalam, dimana kebutuhan konsumsi daya minimum dan sifat interrupt yang terprediksi diimbangi dengan performa yang luar biasa dan kompatibilitas yang kuat dengan platform yang telah ada. Contoh aplikasi prosesor Cortex-R adalah ABS (Automotive Braking Systems), kontroler elektronik roda gigi, hidrolik, dan mesin otomotif. Dalam ARM Embedded terdiri dari Cortex M0, Cortex M1, Cortex M3, dan Cortex R4.
3. Application Cortex Processors
Prosesor jenis ini dikembangkan untuk aplikasi yang membutuhkan daya komputasi yang tinggi (frekuensi prosesing rata-rata 2GHz), seperti netbook, mobile internet devices, smartphone, dan lain-lain.Dalam ARM application terdiri dari Cortex A5, Cortex A8, Cortex A9.
16
2.4.2 Mikroprosesor ARM Cortex M4
ARM prosesor Cortex-M4 adalah prosesor berdaya rendah yang memiliki low gate count, lowinterruptlatency, dan low-cost debug. Cortex-M4 adalah prosesor dengan kemampuan yang sama seperti prosesor Cortex-M4F, dan terdapat fungsi aritmatika floating point. Prosesor ini ditujukan untuk aplikasi yang memerlukan fungsi pemrosesan sinyal digital. ARM prosesor Cortex-M4 mengimplementasikan profil arsitektur ARMv7-M.
Mkiroprosesor ARM Cortex M4 juga termasuk Mkiroprosessor 32 bit, dan memilik fitur yang lengkap seperti ADC internal, 3 (tiga) port serial, interrupt serial, interrupt digital, timer internal. Mendukng I2C dan mempunyai eksekusi program yang cepat dengan clock speed 72 MHz.
Gambar II.7 ARM Cortex M4 tipe MK60DN512ZVLQ10
2.4.3 Sensor IMU
17
Berikut ini penjelasan jenis perangkat sensor IMU:
1. Akselerometer
Akselerometer adalah alat yang digunakan untuk mengukur percepatan, mendeteksi dan mengukur getaran (vibrasi), dan mengukur percepatan akibat gravitasi. Akselerometer dapat digunakan untuk mengukur getaran pada mobil, mesin, bangunan, dan instalasi pengamanan. Akselerometer juga dapat diaplikasikan pada pengukuran aktivitas gempa bumi dan peralatan-peralatan elektronik, seperti permainan 3 dimensi, mouse komputer, dan telepon.
Akselerometer memiliki berbagai aplikasi dalam bidang industri dan sains. Akselerometer yang sangat sensitif digunakan sebagai komponen sistem navigasi inersia pada pesawat tempur dan rudal. Akselerometer juga digunakan untuk mendeteksi dan memonitor getaran pada mesin putar. Selain itu, akselerometer digunakan pada komputer tablet dan kamera digital agar foto di layar selalu ditampilkan tegak.
Gambar II.8 Ilustrasi Pembacan Sensor Akselerometer
Keterangan Gambar II.8 adalah sebagai berikut:
+1g, posisi diam sensor searah dengan arah vertikal bumi dan menghadap ke atas.
0g, posisi diam sensor searah dengan arah horizontal bumi.
18
Sudut kemiringan dapat dihitung dari percepatan dengan menggunakan
persamaan berikut ini:
x = tan-1 (
) ………...2.1
y = tan-1 (
) ………...2.2
2. Giroskop
Giroskop adalah perangkat yang berfungsi untuk mengukur kecepatan sudut atau mempertahankan gerak rotasi. Satuan kecepatan sudut yang diukur dalam derajat per detik (°/s) atau revolusi per detik (RPS).
Giroskop juga dapat digunakan untuk menentukan orientasi, yang sering ditemukan di sebagian besar sistem navigasi otonom. Misalnya, jika ingin menyeimbangkan robot, giroskop dapat digunakan untuk mengukur rotasi dari posisi seimbang dan mengirimkan koreksi ke motor.
Tiga sumbu giroskop, dapat mengukur rotasi sekitar tiga sumbu: x, y, dan z. Beberapa giroskop terdiri dari sumbu tunggal dan ganda, tetapi yang banyak digunakan adalah jenis giroskop yang memiliki tiga sumbu dalam satu chip.
Dengan memanfaatkan data kecepatan sudut tersebut dapat diketahui kemiringan (roll, pitch, yaw) suatu benda. Untuk mengetahui nilai sudut, data kecepatan sudut harus terintegrasi. Persamaannya adalah berikut ini:
(x,y,z) = ∫ dt ……….2.3
dt = T = tn-tn-1 ………....2.4
dimana
T = sample time atau waktu siklus
n = {1,2,3…} contoh nilai
19
adapun persamaan matematis yang aplikasikan pada
mikrokontroler adalah sebagai beriku:
( x,y,z)tn = * T+ ( x,y,z)tn-1………2.5
Gambar II.9 Ilustrasi gerakan kemiringan sudut roll, pitch dan yaw
3. Magnetometer
Magnetometer adalah peralatan elektronik yang berguna untuk mengukur kekuatan dari medan magnet. Adanya medan magnet bumi yang berasal dari utara membuat sensor magnetometer dapat digunakan untuk mengukur sudut terhadap arah-arah utara bumi. Persamaan untuk mengetahui nilai kompas adalah sebagai berikut
sudut(θ) = arcTAN(
) ……..………..2.6
dimana
MagX = nilai keluaran magnetometer sumbu X MagY = nilai keluaran magnetometer sumbu Y
Sudut (θ) = sudut yang didapat hasil pemanfaatan sensor magnetometer (derajat)
4. Barometer
20
Persamaan untuk mengukur ketinggian menggunakan sensor barometer adalah sebagai berikut:
………..2.7
Dimana :
p = tekanan (Pa)
p0 = sea level standard atmospheric pressure (101325Pa)
altitude = nilai ketinggian (mdpl)
2.4.4 GPS (Global Positioning System)
GPS adalah sebuah sistem navigasi berbasiskan radio yang menyediakan informasi koordinat posisi, kecepatan, dan waktu kepada pengguna di seluruh dunia. Jasa penggunaan satelit GPS tidak dikenakan biaya. Pengguna hanya membutuhkan GPS receiver untuk dapat mengetahui koordinat lokasi. Keakuratan koordinat lokasi tergantung pada tipe GPS receiver.
GPS terdiri dari tiga bagian yaitu satelit yang mengorbit bumi (Satelit GPS mengelilingi bumi 2x sehari), stasiun pengendali dan pemantau di bumi, dan GPS receiver (alat penerima GPS). Satelit GPS yang mengorbit bumi tampak pada Gambar II.10. Satelit GPS dikelola oleh Amerika Serikat. Alat penerima GPS inilah yang dipakai oleh pengguna untuk melihat koordinat posisi. Selain itu GPS juga berfungsi untuk menentukan waktu.
21
2.5 Perangkat Lunak dan Aplikasi
2.5.1 Microsoft Visual Studio 2010
Microsoft Visual Studio merupakan sebuah perangkat lunak lengkap (suite) yang dapat digunakan untuk melakukan pengembangan aplikasi, baik itu aplikasi bisnis, aplikasi personal, ataupun komponen aplikasinya, dalam bentuk aplikasi console, aplikasi Windows, ataupun aplikasi Web. Visual Studio mencakup kompiler, SDK, IDE (Integrated Development Environment), dan dokumentasi (umumnya berupa MSDN Library). Kompiler yang dimasukkan ke dalam paket Visual Studio antara lain Visual C++, Visual C#, Visual Basic, Visual Basic .NET, Visual InterDev, Visual J++, Visual J#, Visual FoxPro, dan Visual SourceSafe.
Program antarmuka yang dibuat pada perancangan OBDH ini menggunakan bahasa C# (See Sharp) yang bekerja dengan dua halaman kerja yaitu:
1. Form Design: digunakan untuk mengatur tampilan program (User
Interface) yang dibuat.
22
2. Form Designer Generated Code: digunakan untuk menuliskan sourcecode.
Fungsi-fungsi dari source code agar dapat bekerja sesuai dengan aksi yang dilakukan pada halaman Form Design.
Gambar II.12 Tampilan Form Designer Generated Code
2.5.2 Arduino IDE
Arduino IDE adalah sebuah editor yang digunakan untuk menulis program, mengcompile dan mendownloadnya ke mikrokontroler Teensy. Bahasa pemrograman yang digunakan adalah bahasa C.
23
Tampilan Arduino IDE tampak pada Gambar II.13.
Gambar II.13 Tampilan lembar kerja Arduino IDE
Arduino IDE menyediakan fasilitas Serial Monitor untuk melihat data komunikasi serial dari perangkat luar. Semua data yang dikirim dari mikrokontroler ke perangkat luar atau dari perangkat luar ke mikrokontroler dapat dilihat langsung dalam Serial Monitor ini.
24
2.5.3 Aplikasi “XCTU.exe”
X-CTU merupakan perangkat lunak atau aplikasi yang dibuat oleh DIGI yang berfngsi untuk mengatur dan melihat konfigurasi pada Modul komunikasi Data XBee PRO S2B. Berikut ini tampilan aplikasi X-CTU.exe
Gambar II.15 Tampilan antarmuka aplikasi “X-CTU.exe”
Beberapa fungsi yang dapat digunakan pada aplikasi ini adalah: 1. Pengecekan kanal yang sedang digunakan pada modul radio 2. Pengesetan kanal yang ingin digunakan
3. Menyediakan terminal antarmuka untuk pengiriman dan penerimaan data serial.
25
Beberapa langkah untuk pengaturan modul komunikasi XBee PRO S2B adalah sebagai berikut:
1. Pastikkan USB Serial Port tedeteksi pada perangkat lunak X-CTU
Gambar II.16 USB Serial Port
2. Atur Baudrate, Flow Control, Data Bit, Parity, Stop Bit. Kemudian klik
“Test/Query”, maka identitas atau versi XBee akan muncul seperti modem type dan firmware version.
26
3. Jika sudah, pilih menu “Modem Configuration”, kemudian klik “Read” untuk mengatur nilai parameter dari XBee PRO S2B. Setelah di-read maka akan muncul parameter-parameter yang dapat disetting.
87
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berikut ini merupakan simpulan-simpulan yang telah diambil dari berbagai hasil pengujian
1. Hasil rancang OBDH (On-Board Data Handling) memuat sistem catu daya, sensor, mikrokontroller dan komunikasi (radio frekuensi) telah berhasil dirancang. Dan Perangkat Keras OBDH telah berhasil melakukan telemetri, telecommand dan tracking GPS Hal ini berdasarkan hasil uji peluncuran dimana data dapat diterima dengan baik pada aplikasi Ground Control Station.
2. Jarak maksimal pengiriman data menggunakan modul radio XBee-PRO ZB (S2B) diruang terbuka (tanpa halangan) pada baudrate 57600 adalah 300 meter.
3. Dikarenakan terdapat sensor yang sensitif terhadap magnet. Maka penempatan sensor harus jauh dari benda yang mengandung magnet minimal 15cm.
4. Berdasarkan pengujian kecepatan waktu eksekusi program pada satu looping menggunakan mikroprosesor 32 bit lebih cepat dibandingkan dengan mikroprosesor 8 bit.
5. Dengan menggunakan mechanical filtering window dapat mendeskriminasi nilai error kecil yang timbul pada saat benda dalam keadaan diam. Error yang muncul pada saat perangkat keras OBDH dalam keadaan diam tersebut 99% berhasil dihilangkan.
88
5.2 Saran
Adapun saran bagi pengembangan tugas akhir ini adalah sebagai berikut:
1. Menggunakan metode pemrograman RTOS (Real-time operating systems). 2. Dilengkapi dengan program kontrol PID untuk kesetabilan roket pada saat
meluncur.
89
DAFTAR PUSTAKA
[1] Bayle Julien, 2013, C Programing for Arduino, Birmingham B3 2PB
[2] Forouzan, Behrouz, DataCommunication And Networking, Fourth Edition, McGraw-Hill, 2007
[3] Honeywell, Compass Heading Using Magnetometer, 203.
[4] Kurt Seifert and Oscar Camacho, Implementing Positioning Algorithms Using Accelerometers. 2007
[5] Renaldi Ripharbowo, Mohammad Gavin, Perancangan Hardware & Software On-Board Data Handling UI-SAT dengan Prosesor LPC1768 ARM Cortex M-3, 2012.
[6] Tuck, Kimberly, Implementing Auto-Zero Calibration Technique For Accelerometers Freescale Semiconductor Aplication Note, 2007
[7] Caspersen Gert, Onboard Data Handling. diakses pada http://www.space.aau.dk/cubesat/documents/Onboard_Data_Handling.pdf tanggal 15 November 2014
[8] ARM ltd, Cortex-M4 Prosessor, diakses pada
http://infocenter.arm.com/help/index.jsp tanggal 4 Januari 2015.
[9] Caspersen Gert, Onboard Data Handling. Diakses pada http://www.space.aau.dk/cubesat/documents/Onboard_Data_Handling.pdf tanggal 15 November 2014
[10] Daniel Widyanto, Mengenal ARM CortexM0, diakses pada http://www.kelas-mikrokontrol.com/e-learning/mikrokontroler/mengenal-arm-cortex%C2%ADm0.html tanggal 4 Januari 2015.
[11] Kong Wai Weng, Measuring Titl Angle With Gyro and Accelerometer. 2009 diakses pada http://tutorial.cytron.com.my/2012/01/10/measuring-tilt-angle-with-gyro-and-accelerometer/ tanggal 20 Februari 2015.
BIODATA PENULIS
Nama : Lutfi Abdussalam Al Faiz Tempat, Tanggal Lahir : Tasikmalaya, 23 Oktober 1991 Agama : Islam
Anak ke- : 1 dari 3 bersaudara
Alamat : Bojongsoban, Ds. Tanjungsari Kec. Sukaresik kab. Tasikmalaya
Handphone : +62853 2258 1991 E-mail : [email protected]
Pendidikan : 1999-2004 : SDN Bojongsoban 2004-2007 : MTs Al Mutaaly 2007-2010 : SMAN 1 Ciawi
2010-2015 : Universitas Komputer Indonesia
Kegiatan ekstra akademis : 2011-2012 : Wakil Ketua HIMA Teknik komputer 2012-2015 : Anggota Divisi Roket & Unmanned System 2012 : Ketua Tim Roboboat Finalis Kontes Kapal Cepat
Tak Berawak Nasional
2013 : Anggota Tim Next Arjuna Finalis Kompetisi Muatan Roket Indonesia.
2013-2014 : Asisten Dosen MK. Mikroprosesor Asisen Dosen MK. Kendali I
2014 : Ketua Tim Bullet Force V.2 Finalis Kompetisi Muatan-Roket dan Roket Indonesia
Prestasi : 2012-2015 : Beasiswa Unggulan
2013 : Penghargaan mahasiswa berprestasi dari Rektor UNIKOM
2014 : Penghargaan mahasiswa berprestasi dari Rektor UNIKOM