RANCANG BANGUN PENDETEKSI MOBIL PADA LAHAN
PARKIR MENGGUNAKAN MOTION DETECTION
TUGAS AKHIR
Program Studi
S1 Sistem Komputer
Oleh:
ISANA MAHAR DIKA L.W
09410200053
FAKULTAS TEKNOLOGI DAN INFORMATIKA
viii
HALAMAN JUDUL ... i
HALAMAN MOTTO ... iii
HALAMAN PERSEMBAHAN ... iv
HALAMAN PENGESAHAN ... v
HALAMAN PERNYATAAN ... vi
KATA PENGANTAR ... vii
DAFTAR ISI ... viii
DAFTAR TABEL ... xiii
DAFTAR GAMBAR ... xiv
ABSTRAK ... xvi
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.1. Perumusan Masalah ... 1
1.2. Pembatasan Masalah ... 2
1.3. Tujuan ... 2
1.4. Kontribusi ... 3
1.5. Sistematika Penulisan ... 3
BAB II LANDASAN TEORI ... 5
2.1. Webcam... 5
2.2. Citra Digital ... 6
2.3. Pengolahan Citra Digital ... 7
2.3.2. Thresholding ... 12
2.3.3. Background Subtraction... 14
2.4. Color Space ... 15
2.4.1. RGB ... 15
2.5. Computer Vision ... 17
2.6. OpenCV ... 18
BAB III METODE PENELITIAN ... 20
3.1. Perancangan Sistem dan Blok Diagram Sistem ... 20
3.2. Perancangan perangkat keras ... 22
3.3 Perancangan perangkat lunak ... 24
3.4 Pengambilan Citra Sampel ... 26
3.5 Penerimaan Data Citra ... 27
3.6 Mendeteksi Gerak ... 28
3.7 Proses Update Citra Kondisi Parkir ... 29
3.8 Pengolahan Citra ... 30
3.8.1 Menentukan Koordinat Area ... 31
3.8.2 Akses Pixel ... 32
3.8.3 Background Subtraction ... 33
3.8.4 Grayscaling ... 37
3.8.5 Thresholding ... 38
3.9 Penghitungan Pixel Putih (Counting White Pixel) ... 39
3.10 Identifikasi Benda ... 42
BAB IV PENGUJIAN DAN EVALUASI SISTEM ... 48
4.1. Pengujian Streaming Citra Melalui Webcam ... 48
4.1.1. Tujuan ... 48
4.1.2. Alat yang Digunakan... 48
4.1.3. Prosedur Pengujian ... 49
4.1.4. Hasil Pengujian ... 49
4.2. Pengujian Update Citra Kondisi Parkir... 49
4.2.1. Tujuan ... 50
4.2.2. Alat yang digunakan ... 50
4.2.3. Prosedur Pengujian ... 50
4.2.4. Hasil Pengujian ... 50
4.3. Pengujian Penentuan Koordinat Pada Tiap Area ... 52
4.3.1. Tujuan ... 52
4.3.2. Alat yang Digunakan... 52
4.3.3. Prosedur Pengujian ... 52
4.3.4. Hasil Pengujian ... 53
4.4. Pengujian Akses Pixel ... 55
4.4.1. Tujuan ... 55
4.4.2. Alat yang Digunakan... 55
4.4.3. Prosedur Pengujian ... 55
4.4.4. Hasil Pengujian ... 56
4.5. Pengujian Akses Pixel ... 57
4.5.1. Tujuan ... 57
4.5.3 Prosedur Pengujian ... 57
4.5.4 Hasil Pengujian ... 58
4.6. Pengujian Background Subtraction ... 59
4.6.1 Tujuan ... 59
4.6.2 Alat yang Digunakan... 60
4.6.3 Prosedur Pengujian ... 60
4.6.4 Hasil Pengujian ... 60
4.7. Pengujian Thresholding ... 63
4.7.1 Tujuan ... 63
4.7.2 Alat yang Digunakan... 63
4.7.3 Prosedur Pengujian ... 63
4.7.4 Hasil Pengujian ... 64
4.8. Pengujian Penghitungan Pixel ... 65
4.8.1 Tujuan ... 65
4.8.2 Alat yang Digunakan... 65
4.8.3 Prosedur Pengujian ... 66
4.8.4 Hasil Pengujian ... 66
4.9. Pengujian Identifikasi Benda ... 67
4.9.1 Tujuan ... 67
4.9.2 Alat yang Digunakan... 67
4.9.3 Prosedur Pengujian ... 68
4.9.4 Hasil Pengujian ... 68
4.10. Evaluasi Sistem Secara Keseluruhan ... 75
4.10.2 Alat yang Digunakan... 75
4.10.3 Prosedur Pengujian ... 76
4.10.4 Hasil Pengujian ... 76
BAB V PENUTUP ... 85
5.1 Kesimpulan ... 85
5.2 Saran ... 86
DAFTAR PUSTAKA ... 87
LAMPIRAN ... 88
BAB I
PENDAHULUAN
1.1. Latar Belakang Masalah
Tempat parkir merupakan sarana yang sangat penting di setiap tempat. Luas tempat parkir dan banyaknya kendaraan yang terparkir membuat pengendara yang ingin memarkirkan kendaraan kesulitan dalam menemukan tempat yang kosong,
Kebanyakan tempat parkir sekarang dilengkapi dengan kamera CCTV yang berguna hanya untuk memantau keadaan parkir tersebut. Dari citra yang dihasilkan oleh CCTV dapat diproses lebih lanjut menjadi sistem yang dapat mendeteksi tempat parkir yang kosong kepada para pengendara dengan metode pengolahan citra.
Pada Tugas Akhir ini akan dirancang sebuah sistem yang dapat mendeteksi serta menginformasikan tempat parkir kosong menggunakan sistem yang terdiri dari 3 bagian utama yaitu kamera, komputer, dan display. Kamera diletakkan pada posisi dan sudut tertentu untuk proses pengambilan gambar situasi blok parkir. Komputer digunakan untuk mengolah citra yang diterima dari kamera menjadi informasi tempat kosong. Hasil proses pendeteksian akan ditampilkan/diinformasikan kepada pengendara melalui display dalam bentuk
command windows .
1.2. Rumusan Masalah
1. Bagaimana membuat sistem untuk mendeteksi lokasi parkir dengan mendeteksi dari citra streaming lokasi parkir dengan mempertimbangkan objek yang bergerak
2. Bagaimana mengaplikasikan metode Motion Detection menggunakan
Background Subtraction untuk menentukan lokasi parkir yang kosong.
1.3. Batasan Masalah
Dalam perancangan dan pembuatan perangkat terdapat beberapa pembatasan masalah sebagai berikut:
1. Uji coba sistem ini dilakukan pada miniatur. 2. Kamera yang digunakan adalah webcam.
3. Miniatur didesain seperti salah satu lantai tempat parkir mobil di Tunjungan Plaza Surabaya.
4. Lokasi parkir yang dideteksi mencakup untuk 3 mobil tiap gambar. 5. Informasi lahan parkir akan diperbarui secara berkala.
1.4. Tujuan
Tujuan dari perancangan dan pembuatan sistem ini adalah sebagai berikut: 1. Membuat sistem yang mampu mendeteksi lokasi parkir yang kosong dari citra
lokasi parkir menggunakan kamera.
1.5. Kontribusi
Kontribusi tugas akhir ini adalah apabila sistem ini diterapkan maka dapat
membuat orang lebih muda untuk mencari tempat parkir yang masih kosong.
1.6. Sistematika Penulisan
Sistematika penulisan buku tugas akhir ini terdiri dari lima bab, yang secara ringkas dapat diuraikan sebagai berikut :
BAB I : Pendahuluan
Pada BAB I dijelaskan tentang latar belakang masalah, perumusan masalah, pembatasan masalah, tujuan, kontribusi dan sistematika penulisan buku tugas akhir.
BAB II : Landasan Teori
Pada BAB II menjelaskan tentang kamera, citra digital, pengolahan citra yang meliputi grayscaling, thresholding, metode background
subtraction (subtraksi background), color space yang meliputi RGB,
computer vision dan opencv, motion detection.
BAB III : Metode Penelitian
Pada BAB III membahas tentang perangkat-perangkat yang digunakan dalam membuat tugas akhir ini, baik (hardware) yang berupa miniatur maupun perangkat lunak (software) diantaranya
flowchart, proses update citra kondisi parkir,proses mendeteksi
BAB IV : Pengujian dan Evaluasi Sistem
Pada BAB IV membahas tentang pengujian sistem meliputi, pengujian pengambilan gambar secara otomatis setiap lima detik sekali, proses grayscale, proses thresholding, proses subtraksi, proses mengenali benda dari citra biner, proses menentukan koordinat tertentu.
BAB V : Penutup
5
BAB II
LANDASAN TEORI
2.1. Webcam
Web camera atau bisa juga disebut webcam Kamera web (singkatan dari web
atau kamera) adalah sebutan bagi kamera waktu-nyata yang gambarnya bisa dilihat melalui World Wide Web (www), program instant messaging, atau aplikasi pemanggilan video. Istilah webcam merujuk pada teknologi secara umumnya, sehingga kata web kadang-kadang diganti dengan kata lain yang mendeskripsikan pemandangan yang ditampilkan di kamera, misal streetcam memperlihatkan pemandangan jalan.
Ada juga metrocam yang memperlihatkan pemandangan panorama kota dan pedesaan, trafficam yang digunakan untuk memonitor keadaan jalan raya. Web cam atau web camera adalah sebuah kamera video digital kecil yang dihubungkan ke computer melalui (biasanya) port USB ataupun port COM.III Webcam juga digambarkan sebagai kamera video digital yang sengaja didesain sebagai kamera dengan resolusi rendah. webcam dapat digunakan untuk sistem keamanan.
Webcam sangat bermanfaat dalam bidang telekomunikasi, bidang keamanan dan
bidang industri. Sebagai contoh webcam digunakan untuk videocall chatting,
Gambar 2.1 Webcam (M.Syarif , 2011)
2.2. Citra Digital
Citra digital menunjuk pada pemrosesan gambar dua dimensi menggunakan computer. Dalam konteks yang lebih luas, pengolahan citra digital mengacu pada pemrosesan setiap data dua dimensi. Citra digital merupakan sebuah larik (array) yang berisi nilai-nilai real, kompleks yang direpresentasikan dengan deretan bit tertentu.
Sebuah citra dapat didefinisikan sebagai fungsi f(x,y) berukuran M baris dan N kolom, dengan x adalah y adalah koordinat spasial, dan amplitude f dititik koordinat (x,y) dinamakan intensitas atau tingkat keabuan dari citra pada titik tersebut. Apabila nilai x, y dan nilai amplitude f secara keseluruhan sehingga (finite) dan bernilai diskrit maka dapat dikatakan bahwa citra tersebut adalah citra digital. Nilai pada suatu irisan antara baris dan kolom (pada posisi x,y) disebut dengan picture elements,image elements, pels, atau pixels istilah terakhir (pixel) paling sering digunakan pada citra digital.
Gambar 2.2 Citra Digital (Nixon dan Aguado, 2002)
Teknologi dasar untuk menciptakan dan menampilkan warna pada citra digital berdasarkan pada penelitian bahwa sebuah warna merupakan kombinasi dari tiga warna dasar, yaitu merah, hijau dan biru (Red, Green, Blue - RGB).
2.3. Pengolahan Citra Digital
Pengolahan citra adalah salah satu cabang dari ilmu informatika. Pebgolahan citra berkutat pada usaha untuk melakukan transformasi suatu citra/gambar menjadi citra lain dengan menggunakan teknik tertentu. Citra adalah representasi atau tiruan dari suatu benda atau objek. Citra dibai menjadi dua, yaitu citra analog dan citra digital. Citra analog adalah citra yang dihasilkan sinyal kontinyu, missal foto yang dicetak di kertas foto, citra yang tampil di layar TV, citra yang dihasilkan oleh CT-scan, citra yang tersimpan dalam pita kaset, dll. Sedangkan citra digital adalah citra yang bisa diolah langsung oleh computer dan tersimpan dalam media simpan digital misalnya memory, hardisk, cd, dll. Contoh dari citra
y
x
x1
y1
digital ini adalah foto yang dihasilkan oleh kamera digital, citra yang dihasilkan oleh scanner, dll.
2.4 Fungsi Pengolahan Citra
Pengolahan citra bertujuan untuk memperbaikik kualitas citra agar mudah diinterpretasikan oleh manusia atau mesin dan untuk mengolah informasi yang ada pada suatu gambar untuk kebutuhan identifikasi objek secara otomatis.
Tekni-teknik pengolahan citra mentransformasikan citra menjadi citra lain. Inputan pada proses ini adaah citra dan keluarannya juga berupa citra dengan kualitas lebih baik daripada citra inputan sebelumnya. Pengolahan citra digital diperlukan di beberapa bidang misalnya: bidang kedokteran, fotografi, kemanan data, dll.
Agar mudah diinterpretasi oleh manusia atau komputer, pengolahan citra harus dilakukan dengan berbagai macam metode untuk mencapai citra sesuai yang diinginkan.
Operasi-operasi yang dilakukan di dalam pengolahan citra banyak jenisnya. Secara umum, operasi pengolahan citra dapat diklasifikasikan dalam beberapa jenis sebagai berikut:
1. Perbaikan kualitas citra (Image enhancement.)
Jenis operasi ini bertujuan untuk memperbaiki kualitas citra dengan cara memanipulasi parameter-parameter citra. Dengan operasi ini, ciri-ciri khusus yang terdapat di dalam citra lebih ditonjolkan.Contoh-contoh operasi perbaikan citra:
a. perbaikan kontras gelap/terang
c. penajaman (sharpening) d. grayscaling
e. noise filtering
2. Pemugaran citra (Image restoration.)
Operasi ini bertujuan menghilangkan/meminimumkan cacat pada citra. Tujuan pemugaran citra hampir sama dengan operasi perbaikan citra. Bedanya, pada pemugaran citra penyebab degradasi gambar diketahui. Contoh-contoh operasi pemugaran citra:
a. penghilangan kesamaran (deblurring) b. penghilangan derau (noise)
3. Pemampatan citra (Image compression.)
Jenis operasi ini dilakukan agar citra dapat direpresentasikan dalam bentuk yang lebih kompak sehingga memerlukan memori yang lebih sedikit. Hal penting yang harus diperhatikan dalam pemampatan adalah citra yang telah dimampatkan harus tetap mempunyai kualitas gambar yang bagus. Contoh metode pemampatan citra adalah metode JPEG.
4. Segmentasi citra (Image segmentation.)
Jenis operasi ini bertujuan untuk memecah suatu citra ke dalam beberapa segmen dengan suatu kriteria tertentu. Jenis operasi ini berkaitan erat dengan pengenalan pola.
5. Pengorakan citra (Image analysis.)
diperlukan untuk melokalisasi objek yang diinginkan dari sekelilingnya. Contoh-contoh operasi pengorakan citra:
a. Pendeteksian tepi objek (edge detection) b. Ekstraksi batas (boundary)
c. Representasi daerah (region)
6. Rekontruksi citra (Image reconstruction)
Jenis operasi ini bertujuan untuk membentuk ulang objek dari beberapa citra hasil proyeksi. Operasi rekonstruksi citra banyak digunakan dalam bidang medis. Misalnya beberapa foto rontgen dengan sinar X digunakan untuk membentuk ulang gambar organ tubuh. (Nixon dan Aguado, 2002)
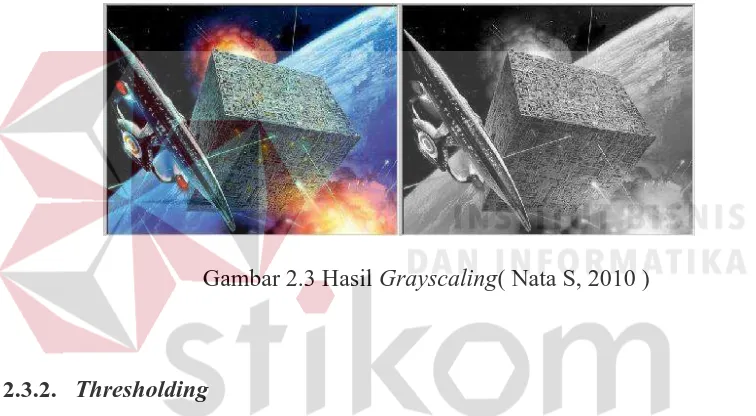
2.3.1. Gray-Scaling
secara digital suatu gray-scale image dapat direpresentasikan dalam bentuk array dua dimensi. Tiap elemen dalam array menujukkan intensitas (grey level) dari image pada posisi koordinat yang bersesuain. Apabila suatu citra direpresentasikan dalam 8 bit maka berarti pada citra terdapat 28 ata 256 level
gray-scale, (biasanya bernilaiu 0-255), dimana 0 menunjukkan level intensitas
Jumlah pixel dimulai dari sudut kiri atas sedangkan koordinat x dan y berada pada sudut kiri bawah.
Format citra ini disebut skala keabuan karena pada umumnya warna yang dipakaiadalah antara hitam sebagai warna minimal dan warna putih sebagai warna maksimal sehingga warna antaranya adalah abu-abu.
Persamaan yang digunakan untuk mengkonversikan citra berwarna menjadi citra skla keabuhan adalah sebagai berikut (Basuki,A:2005) :
Gray = (R + G + B) / 3
Kon versi informasi suatu citra warna ke skala keabuhan dapat juga
dilakukan dengan cara memberi bobot pada setiap elemen warna (Achmad: 2005), sehingga persamaan diatas dimodifikasi menjadi :
Gray =wRR + wGG + wBB
Dengan wR, wG dan wB masing-masing adalah bobot untuk elemen warna
merah, hijau dan biru. NTSC (National Television System Committee)
mendefinisikan bobot untuk konversi citra warna ke skala keabuan adalah sebagai berikut :
untuk citra berwarna nilai dari suatu pixel missal adalah X, maka untuk mendapatkan nilai Red, Green, Blue dapat menggunakan rumus :
Blue = X / 216
Green = (X – Blue * 216) / 28
Red = X – Blue * 216– Green * 28
Berikut adalah contoh gambar hasil grayscaling
Gambar 2.3 Hasil Grayscaling( Nata S, 2010 )
2.3.2. Thresholding
Thresholding adalah proses mengubah citra berderajat keabuan menjadi citra
biner atau hitam putih sehingga dapat diketahui daerah mana yang termasuk obyek dan background dari citra secara jelas. Citra hasil thresholding biasanya digunakan lebih lanjut untuk proses pengenalan obyek serta ekstrasi fitur. Metode
thresholding secara umum dibagi menjadi dua, yaitu :
1. Thresholding global
2. Thresholding adatif
Thresholding dilakukan dengan membagi citra menggunakan beberapa
sub citra. Lalu pada setiap sub citra, segmentasi dilakukan dengan menggunakan threshold yang berbeda.
Yang menjadi fokus dalam tugas akhir ini adalah metode thresholding global. Thresholding diimplementasikan setelah dilakukan proses perbaikan kontras citra, thresholding dikatakan global jika nilai
threshold T hanya bergantung pada f(x,y), yang melambangkan tingkat
keabuan pada titik (x,y) dalam suatu citra.berikut ini akan disajikan contoh partisi histogram untuk memperoleh threshold
Histogram yang berada pada sisi kiri gambar mewakili citra f(x,y) yang tersusun atas obyek terang diatas background gelap. Pixel – pixel obyek
teknik partisi histogram. Citra hasil thresholding dapat didefinikan sebagaimana persamaan dibawah ini.
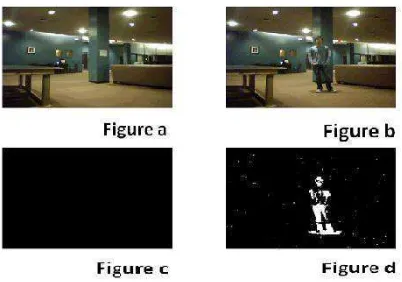
2.3.3. Background Subtraction
Pemrosesan citra biasanya dapat diartikan sebagai pemrosesan gambar digital. Dari sebuah gambar dapat dilakukan berbagai macam images prossesing, begitu pula dengan video. Karena pada dasarnya terdiri atas beberapa gambar yang saling berganti atau biasa disebut frame. Biasanya dalam 1 detik pada sebuah video terdapat 12 frame atau gambar yang sequen berganti. Hal ini berlangsung secara cepat sehingga kita mungkin tidak menyadarinya. Pada proyek ini akan dibahas pemrosesan pada video, yaitu tracking objek bergerak. Penelitian dalam segmentasi, estimasi dan tracking objek bergerak pada video banyak mendapat perhatian dalam beberapa tahun belakangan ini. Tracking objek bergerak merupakan suatu hal penting dalam system video.
Gambar Subtraksi Latar (Picardi dan Jan, 2003)
2.4. Color Space
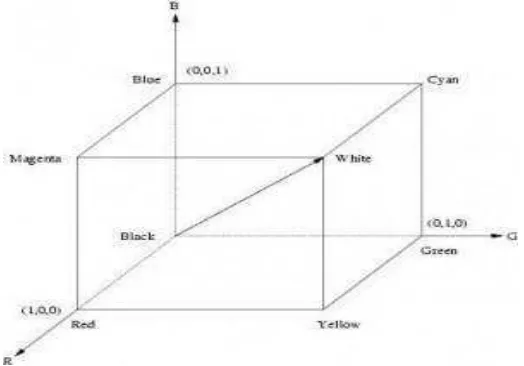
2.4.1. RGB
Gambar koordinat warna RGB
Warna dipresentasikan dalam suatu sinar tambahan untuk membentuk warna baru, dan berhubungan untuk membentuk sinar campuran. Citra pada gambar sebelah kiri menunjukkan campuran dengan menambahkan warna utama merah, hijau dan biru untuk membentuk warna sekunder kuning (merah + hijau), cyan (biru + hijau), magenta (merah + hijau), dan putih (merah + hijau + biru). Model warna RGB banyak digunakan untuk monitor computer dan video kamera.
2.5. Computer Vision
Computer Vision adalah pencitraan komputer dimana aplikasi tidak
melibatkan manusia dalam proses pengulangan visual. Dengan kata lain, gambar yang diperiksa dan di olah oleh komputer. Meskipun orang yang terlibat dalam pengembangan sistem aplikasi, akhirnya membutuhkan komputer untuk mengambil informasi visual secara langsung (Umbaugh, 1998).
Computer vision merupakan sebuah proses otomatis yang mengintegrasikan
sejumlah besar proses persepsi visual, seperti pengolahan citra, klasifikasi citra, pengenalan citra dan akusisi citra. Computer vision didefinisikan sebagai salah satu cabang ilmu pengetahuan yang mempelajari bagaimana komputer dapat mengenali obyek yang diamati atau diobservasi. Cabang ilmu ini bersama kecerdasan buatan (Artificial Intelligence) akan mampu menghasilkan sistem kecerdasan visual (Visual Intelligence System) (Munir, 2004).
Vision = Geometri + Measurement + Interpretatio………(2.10) Proses-proses dalam computer vision dapat dibagi menjadi tiga aktivitas: a. Memperoleh atau mengakuisisi citra digital.
b. Melakukan teknik komputasi untuk memperoses atau memodifikasi data citra. c. Menganalisis dan menginterpretasi citra dan menggunakan hasil pemrosesan
2.6. OpenCV
OpenCV (Open Computer Vision) adalah sebuah API (Application
Programming Interface) library yang sudah sangat familiar pada pengolahan citra
computer vision.Computer vision itu sendiri adalah salah satu cabang dari bidang
ilmu pengolahan citra (Image Processing) yang memungkinkan komputer dapat melihat seperti manusia.Dengan computer vision tersebut komputer dapat mengambil keputusan, melakukan aksi, dan mengenali terhadap suatu objek. Beberapa pengimplementasian dari computer vision adalah face recognition, face
detection, face/pbject tracking, road tracking, dll.
OpenCV adalah library open source untuk computer vision untuk C/C++, OpenCV didesain untuk aplikasi real-time, memiliki fungsi-fungsi akuisisi yang baik untuk image/video. OpenCV juga menyediakan interface ke Integrated
Performance Primitives (IPP) Intel sehingga jika anda bisa mengoptimasi aplikasi
computer vision anda jika menggunakan prosesor Intel (Syafi’i,2011).
Fitur yang dimiliki OpenCV antara lain :
1. Manipulasi data citra (alocation, copying, setting, convert).
2. Citra dan video I/O (file dan kamera based input, image/video file output). 3. Manipulasi Matriks dan Vektor beserta rutin-rutin aljabar linear (products,
solvers, eigenvalues, SVD).
4. Data struktur dinamis (lists, queues, sets, trees, graphs).
5. Pemroses citra fundamental (filtering, edge detection, corner detection,
sampling and interpolation, color conversion, morphological operations,
6. Analisis struktur(connected components, contour processing, distance
Transform, various moments, template matching, Hough Transform,
polygonal approximation, line fitting, ellipse fitting, Delaunay
triangulation).
7. Kalibrasi kamera (calibration patterns, estimasi fundamental matrix,
estimasi homography, stereo correspondence).
8. Analisis gerakan (optical flow, segmentation, tracking). 9. Pengenalan obyek (eigen-methods, HMM).
10. Graphical User Interface (display image/video, penanganan keyboard dan
mouse handling, scroll-bars).
OpenCV terdiri dari 3 library, yaitu:
1. CV : Untuk algoritma Image Processing dan Vision 2. Highgui : Untuk GUI, Image dan Video I/O
BAB III
METODE PENELITIAN
Untuk pengumpulan data yang diperlukan dalam melaksanakan tugas akhir, ada beberapa cara yang telah dilakukan, antara lain:
1. Studi kepustakaan
Studi kepustakaan berupa pencarian data-data literatur dari fungsi pada
library OpenCV, melalui pencarian dari internet, dan konsep-konsep teoritis dari
buku-buku penunjang serta metode yang akan digunakan untuk melakukan pengolahan citra.
2. Penelitian laboratorium
Penelitian laboratorium dilakukan dengan perancangan perangkat lunak,implementasi perangkat lunak, pengambilan data pengujian aplikasi, kemudian melakukan evaluasi dari data hasil pengujian.
3.1. Perancangan Sistem dan Blok Diagram Sistem
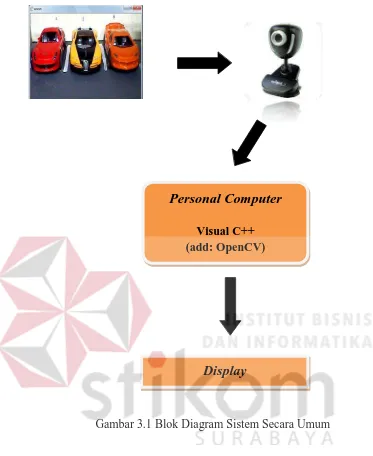
Gambar 3.1 Blok Diagram Sistem Secara Umum
Sebagai input, citra didapatkan dari kamera yang terpasang pada miniatur. Kemudian diproses menggunakan console application Visual C++ 2008 dengan memanfaatkan library OpenCV. Citra yang diperoleh adalah citra keadaan blok parkir mobil. Setelah mendapatkan citra tersebut, maka selanjutnya citra akan diproses untuk kemudian disubtraksi/dikurangkan (subtraction) dengan citra sampel (citra blok tanpa mobil). Dari hasil subtraksi tersebut dilakukan klasifikasi benda yang teridentifikasi merupakan mobil atau tidak. Pada akhirnya akan
Display
Personal Computer
ditampilkan informasi pada PC berupa output nomor tempat yang kosong (diasumsikan bahwa setiap tempat parkir terdapat nomor urut), selain itu juga citra yang diambil secara streaming akan ditampilkan pada layar PC.
3.2. Perancangan Perangkat Keras
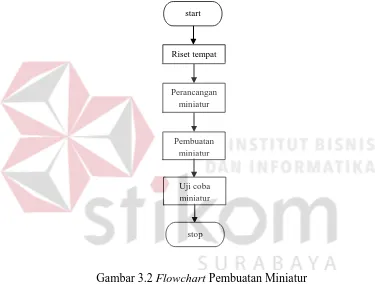
Flowchart perancangan dan pembuatan miniatur sebagai berikut :
Gambar 3.2 Flowchart Pembuatan Miniatur
Perangkat keras pada Tugas Akhir ini berupa miniatur lantai 2 tempat parkir mobil di salah satu pusat perbelanjaan di Surabaya. Sebelum proses pembuatan miniatur telah dilakukan riset untuk mengetahui desain dan ukuran tempat parkir tersebut, selanjutnya dicari ukuran yang tepat untuk diterapkan dalam bentuk miniatur menggunakan skala perbandingan sehingga hasil program bisa mendekati hasil sesungguhnya apabila diterapkan secara real.
Riset tempat
Perancangan miniatur
Pembuatan miniatur
Uji coba miniatur
start
Dari hasil riset diperoleh data yaitu panjang lokasi parkir 50 m dengan tinggi 2,1 m dan lebar 9 m. Dari hasil tersebut ditentukan dimensi miniatur dan didapatkan skala perbandingan 1:25, sehingga panjang miniatur menjadi 2 m, tinggi 8,4 cm, dan lebar 36 cm. Hasil dimensi miniatur tersebut diperoleh dari penghitungan sebagai berikut:
Diketahui:
Panjang sesungguhnya (PS) : 50 m = 5000 cm Tinggi sesungguhnya (TS) : 2,1 m = 210 cm Lebar sesungguhnya (LS) : 9 m = 900 cm
Ketinggian Kamera sesungguhnya (KS) : 2,1 m = 210 cm Jarak Kamera dari mobil sesungguhnya (JK) : 6 m = 600 cm Skala 1:25
Dicari : Pm, Tm, Lm Penyelesaian:
Panjang miniatur (Pm) = 5000/25 = 200 cm = 2 m Tinggi miniatur (Tm) = 210/25 = 8,4 cm
Lebar miniatur (Lm) = 900/25 = 36 cm
Ketinggian kamera miniatur (Km) = 210/24 = 8,4 cm Jarak Kamera miniatur (Jm) = 600/25 = 24 cm
3.3. Perancangan Perangkat Lunak
Dalam perancangan perangkat lunak, compiler yang digunakan adalah Microsoft Visual C++ 2008. Untuk library yang digunakan pada pengolahan citra yaitu library OpenCV v2.3.
Kemudian dalam penulisannya atau dalam pembuatan program, akan meliputi bagian-bagian penting dalam setiap langkah-langkah per bagian sesuai dengan algoritma atau logika sekuensial dari awal sampai output. Berikut adalah algoritma program secara global.
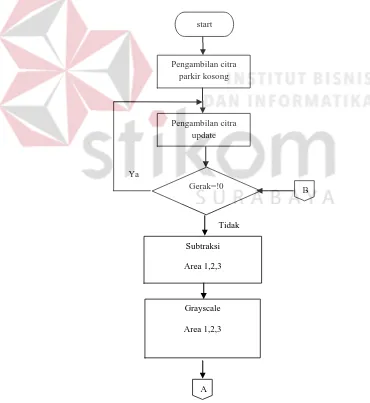
Gambar3.3 Flowchart sistem secara global
Gerak=!0
Tidak Ya
Pengambilan citra update
Subtraksi Area 1,2,3
Grayscale Area 1,2,3
A
B start
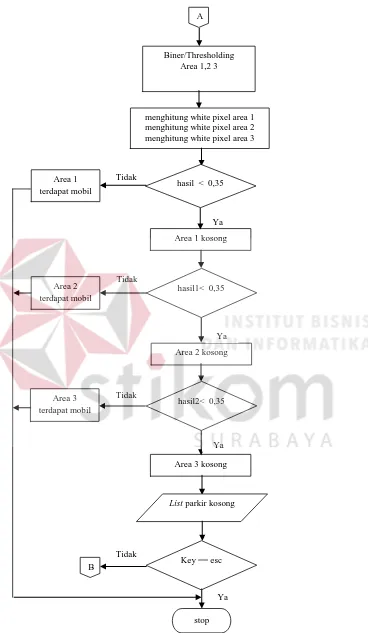
Gambar3.4 Flowchart sistem secara global (lanjutan)
Biner/Thresholding Area 1,2 3
menghitung white pixel area 1 menghitung white pixel area 2 menghitung white pixel area 3
Gambar 3.3 dan Gambar 3.4 adalah Flowchart sistem secara global atau keseluruhan. Dimulai dari pengambilan citra sampel berupa kondisi parkir yang masih kosong. Proses berikutnya adalah kamera melakukan streaming dan mengambil/menyimpan citra kondisi parkir setiap 5 menit sekali (update data). Kemudian menentukan titik koordinat area yang menjadi acuan dalam proses pengolahan citra selanjutnya. Setelah itu mengambil dan mengakses nilai RGB per pixel dari citra sampel dan citra update (citra hasil capture setiap 5 menit sekali). Setelah didapatkan nilai RGB per pixel dari masing-masing citra dan selanjutnya nilai RGB dari citra sampel akan dikurangkan (subtraction) dengan nilai RGB dari citra update. Setelah didapatkan hasil pengurangan nilai RGB maka citra hasil pengurangan/subtraksi diubah dalam bentuk citra abu-abu atau biasa disebut Grayscale. Proses selanjutnya adalah citra yang sudah dalam bentuk
Grayscale diubah menjadi bentuk citra binary melalui proses thresholding agar
dapat dihitung jumlah pixel putih pada area tempat mobil diparkir, dari hasil penghitungan tersebut didapatkan nilai yang akan dianalisis dan dikategorikan ada atau tidaknya mobil di area tersebut dan proses yang terakhir adalah hasil analisis akan ditampilkan di output berupa list nomor parkir yang kosong.
3.4. Pengambilan Citra Sampel
diberi nama background.jpg. Ketika program berjalan program akan memuat citra sampel menggunakan fungsi cvLoadImage dan disimpan dalam variabel img, format variabel img adalah Iplimage. Berikut potongan program untuk memuat citra sampel .
IplImage*img=cvLoadImage( "D:\\pict_TA\\dika\\background.jpg"
);
3.5. Penerimaan Data Citra
Setiap data citra yang dikirimkan dari kamera diakses dengan pointer
CvCapture dan menggunakan fungsi cvCaptureFromCAM(1). Angka 0 pada
fungsi cvCaptureFromCAM(0) merupakan indeks dari kamera yang digunakan. Berikut adalah potongan program untuk proses penerimaan data citra dari Kamera menggunakan.
CvCapture* capture = cvCaptureFromCAM(0);
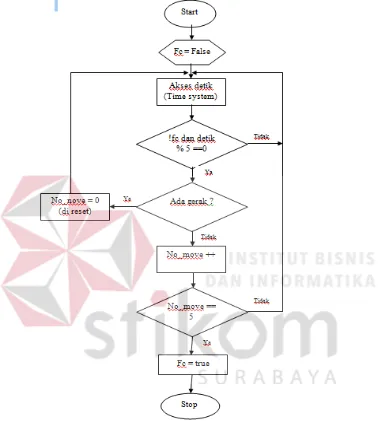
3.6. Mendeteksi gerak
Flowchart proses mendeteksi gerak adalah sebagai berikut.
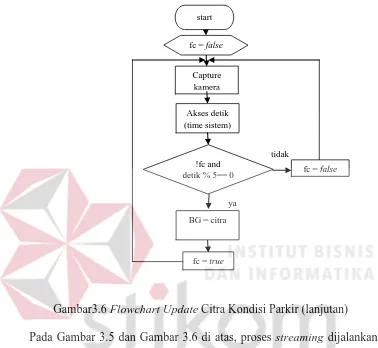
3.7. Proses Update Citra Kondisi Parkir
Flowchart proses update data setiap 5 detik sekali adalah sebagai berikut.
Gambar3.6 Flowchart Update Citra Kondisi Parkir (lanjutan)
Pada Gambar 3.5 dan Gambar 3.6 di atas, proses streaming dijalankan dan program juga mengakses detik yang terdapat pada time system, selain itu pada inisialisasi fc yang merupakan flag diberi nilai awal false. Ketika berada pada kondisi !fc dan menit mencapai 5 detik atau kelipatannya (nilai didapat dari detik dimodulus 5) maka program akan menyimpan hasil capture di variabel BG. Variabel BG adalah variabel dengan format Iplimage yang digunakan untuk menampung data citra hasil update. Proses selanjutnya variabel BG akan diolah sampai mendapatkan hasil yang diinginkan setelah itu nilai fc diberi nilai true. Tetapi jika waktu belum mencapai 5 detik maka program tidak akan mengeksekusi proses selanjutnya hanya menjalankan streaming.
3.8. Pengolahan Citra
Proses pengolahan citra adalah proses yang paling utama dalam pengerjaan program untuk sistem pada Tugas Akhir ini karena menggunakan Kamera sebagai sensor pendeteksinya. Berikut adalah Flowchart pengolahan citra secara garis besar :
Gambar3.7 Flowchart Pengolahan Citra
Metode utama yang digunakan pada proses pengolahan citra adalah metode
Background Subtraction image. Untuk mendukung metode utama dilakukan juga
proses pengolahan citra pendukung seperti konversi warna RGB menjadi bentuk abu-abu (grayscaling) dan konversi warna RGB menjadi hitam putih/biner (thresholding). Proses akses pixel juga merupakan proses yang penting untuk menunjang metode Background Subtraction. Untuk mempermudah proses
Tresholding grayscaling Subtraction Image
Citra
List tempat parkir
start
mendeteksi mobil maka pada image sampel maupun image update dibagi menjadi tiga area mobil ( 1 area berisi 3 mobil) dengan koordinat pixel yang telah ditentukan. Untuk proses pengolahan citra lebih detail lagi akan dijelaskan pada tiap-tiap sub bab.
3.8.1. Menentukan Koordinat Area
Proses menentukan koordinat masing-masing area dilakukan secara manual. Untuk mempermudah mencari koordinat yang tepat maka perlu menampilkan hasil koordinat yang dicoba dengan memberi tanda agar dapat terlihat posisi koordinatnya. Persegi adalah tanda yang akan digunakan untuk menandai masing-masing area pada program Tugas Akhir ini. Pada proses memberi tanda (masking) digunakan function bawaan library OpenCV yaitu.
cvRectangle(CvArr*img,cvPoint(x,y),cvPoint(x1,y1),cvScalar(255,255,255),t,l).
Variabel CvArr*img merupakan citra yang akan diberi gambar persegi, sedangkan untuk variabel cvPoint(x,y) berfungsi menentukan posisi titik sebelah kiri atas pada persegi yang akan dibuat dan fungsi cvPoint(x1,y1) adalah menentukan posisi titik sebelah kanan bawah pada persegi yang akan dibuat. cvScalar(RGB) berfungsi untuk menentukan warna persegi. Variabel t adalah variabel untuk mewakili nilai ketebalan garis yang diinginkan sedangkan variable l adalah untuk menentukan jenis garisnya.
3.8.2. Akses Pixel
Library OpenCV telah menyediakan function untuk Background Subtraction yaitu cvSub(source1, source2, dest, NULL) tetapi hasil subtraksi yang didapatkan tidak maksimal sehingga perlu dilakukan proses subtraksi secara manual. Dalam proses Background Subtraction secara manual langkah yang pertama adalah mengakses RGB per pixel pada citra sampel dan citra update. Berikut adalah potongan program untuk mengakses RGB per pixel dari citra sampel dan citra update :
int blue = ((uchar*)(img->imageData + img->widthStep*y))[x*3];
int green= ((uchar*)(img->imageData + img->widthStep*y))[x*3+1];
int red = ((uchar*)(img->imageData + img->widthStep*y))[x*3+2];
int b= ((uchar*)(BG->imageData + BG->widthStep*y))[x*3];
int g= ((uchar*)(BG->imageData + BG->widthStep*y))[x*3+1];
int r = ((uchar*)(BG->imageData + BG->widthStep*y))[x*3+2];
Variabel blue, green, dan red merupakan variabel untuk menampung nilai dari RGB per pixel pada citra sampel, sedangkan variabel b,g, dan r digunakan pada citra update. Variabel lainnya adalah img dan BG, img yaitu variabel yang menampung data citra sampel sedangkan variabel BG untuk citra update. Function ->imageData berguna untuk mendapatkan data gambar, sedangkan
function ->widthStep berguna untuk memeriksa per pixel. Variabel x dan y
adalah variabel yang digunakan untuk proses perulangan. Sedangkan untuk mengakses komposisi warna RGB pada pixel digunakan ketetapan [x*3] untuk
tahap selanjutnya. Berikut adalah potongan program untuk memasukkan pixel ke dalam bentuk image:
area-> imageData[region->widthStep*y+x*region-> nChannels+1]=sg; area->imageData[region->widthStep*y+x*region-> nChannels+2]=sr; area->imageData[region->widthStep*y+x*region-> nChannels+3]=sb;
Gambar 3.8 Flowchart Background Subtraction
Gambar 3.9 Flowchart Background Subtraction (lanjutan)
Pada Gambar 3.8 dan Gambar 3.9 merupakan Flowchart Background
Subtraction. Dalam Flowchart tersebut telah ditentukan koordinat pixel untuk
masing-masing area/region dengan rincian berikut.
a.Area/region 1, berada diantara koordinat x,y(10<=x<=330 ,50<=y<=450) b. Area/region 2, berada diantara koordinat x,y(480<=x<=800,
50<=y<=450)
c.Area/region 3, berada diantara koordinat x,y(940<=x<=1240, 50<=y<=450)
Pada awalnya image akan koordinat pixel gambar diperiksa satu persatu, apabila mendapatkan koordinat yang sama dengan koordinat area 1 maka proses selanjutnya adalah mengakses pixel RGB pada gambar sampel dan gambar
update.
Pada Flowchart pixel RGB pada gambar sampel dinyatakan dengan Green
pixel, Blue pixel dan Red pixel. Sedangkan pada gambar update dinyatakan
sedangkan region 3 adalah untuk menyimpan hasil subtraksi area 3.Jika koordinat yang di periksa tidak berada di koordinat area 1, area 2 dan area 3 maka program tidak memproses pixel tersebut.
Untuk melakukan proses Background Subtraction, maka harus didapatkan terlebih dahulu citra sampel untuk kemudian dijadikan acuan perbandingan dan pengurangan dengan citra baru yang ingin subtraksi. Dan background subtraction akan menemukan bagian citra baru berupa objek yang berbeda antara citra sampel dengan citra update. Berikut pada Gambar 3.10 adalah contoh background
subtraction.
Gambar 3.10 Contoh Background Subtraction
3.8.4. Grayscaling
Grayscale adalah suatu format citra atau gambar yang tiap-tiap pixel
gambar hanya terdiri dari 1 channel warna. Proses perubahan warna dari RGB menjadi Grayscale bertujuan untuk mempermudah proses selanjutnya yaitu proses perubahan Grayscale menjadi biner. Sehingga setelah proses subtraksi berhasil dilakukan maka langkah selanjutnya ialah melakukan konversi format gambar dari RGB menjadi Grayscale. Untuk mengubah RGB menjadi Grayscale dapat digunakan rumus.
Grayscale = 0.299R + 0.587G + 0.114B
atau dapat menggunakan algoritma dengan merata-rata nilai ketiga buah channel RGB.
Grayscale = ( R + G + B ) / 3
Perubahan gambar RGB menjadi Grayscale menggunakan library openCV pada visual C++ menggunakan perintah sebagai berikut.
cvCvtColor(region1,gimask1,CV_RGB2GRAY);
Pada perintah tersebut sudah terdapat dua frame yaitu region1 dan gimask1. region1 adalah frame RGB hasil subtraksi sedangkan gimask1 adalah
frame yang disediakan untuk Grayscale yang akan dibuat. Sehingga maksud dari
potongan perintah tersebut adalah mengubah gambar region1 menjadi Grayscale dengan fungsi CV_RGB2GRAY lalu disimpan pada frame bernama gimask1.Tetapi terlebih dahulu dibuat deklarasi pointer untuk image graycale, yaitu dengan cara seperti berikut.
Pada potongan program tersebut terdapat IPL_DEPTH_8U yang artinya adalah tiap-tiap pixel bernilai 8 bit. Sedangkan angka 1 setelah koma dibelakang IPL_DEPTH_8U bermakna tiap-tiap pixel hanya terdiri dari sebuah channel.
3.8.5. Thresholding
Untuk melakukan penghitungan pixel putih pada masing-masing region, maka data citra dikonversikan ke dalam citra biner dengan memanfaatkan
thresholding. Thresholding adalah proses mengubah suatu citra berwarna atau
berderajat keabuan (Grayscale) menjadi citra biner atau hitam putih, sehingga dapat diketahui daerah mana yang termasuk objek dan background dari citra secara jelas (Gonzales dan Woods, 2002). Citra hasil thresholding biasanya digunakan lebih lanjut untuk proses pengenalan obyek serta ekstraksi fitur. Tipe data dari hasil proses thresholding adalah tipe data float, yaitu antara 0 sampai dengan 1. Dengan parameter yang di set sebelumnya maka data citra yang jika melebihi batas yang ditentukan akan dibuat menjadi 1 atau putih dan jika dibawah batas yang ditentukan maka akan dibuat menjadi 0 atau hitam.
Namun pada library OpenCV telah disediakan function untuk memproses
thresholding, yaitu dengan menggunakan cvThreshold. Berikut merupakan baris
perintah thresholding.
cvThreshold(gimask1, im_bw, 30, 255, CV_THRESH_BINARY);
3.9. Penghitungan Piksel Putih (Counting White Pixel)
Gambar 3.11 Flowchart Accounting White Pixel
Gambar 3.12 Flowchart Accounting White Pixel (lanjutan)
Pada Gambar 3.11 dan Gambar 3.12 merupakan Flowchart proses untuk menghitung pixel warna putih pada 3 area dari gambar hasil subtraksi yang telah dibinerkan. Pada awalnya variabel counter (white1,white2, white3,pixel1,pixel2 dan pixel3) diberi nilai 0. Setelah melakukan proses subtraksi citra sampel dengan citra update dan telah dilakukan proses Grayscale serta thresholding, selanjutnya
memeriksa koordinat pixel. Jika koordinat y tepat pada range koordinat y area 1 maka proses akan mengakses pixel dan nilainya dimasukkan pada variabel ptr. Selanjutnya jika koordinat x berada pada koordinat x area 1 maka nilai variabel ptr dimasukkan ke dalam variabel value untuk diperiksa apakah bernilai 255 (warna putih). Apabila value bernilai 255 maka nilai variabel counter white1 dan pixel1 ditambahkan 1. Tetapi apabila koordinat x tidak berada pada koordinat x area 1 maka koordinat akan diperiksa kembali untuk mengetahui apakah berada di area 2 atau area 3 atau tidak berada di koordinat 3 area tersebut. Untuk proses penghitungan pixel di area 2 maupun 3 sama seperti halnya di area 1. Sedangkan jika diluar koordinat 3 area tersebut maka tidak akan diproses lebih lanjut. Berikut adalah potongan program untuk menghitung pixel pada salah satu area.
for ( y = 50 ; y <= 450 ; y++) {
uchar* ptr = (uchar*)(im_bw->imageData+im_bw->widthStep*y );
for ( x = 10 ; x <= 330 ; x++)
Pada potongan program tersebut terdapat variabel im_bw yaitu variabel yang menampung frame biner hasil subtraksi area 1.
Penghitungan pixel sangat penting dilakukan untuk proses selanjutnya yaitu identifikasi benda. Karena identifikasi benda dilakukan dengan menghitung prosentasi pixel putih pada masing-masing area.
3.10. Identifikasi Benda
Gambar3.13 Flowchart Identifikasi benda
start
Hasil1 = white1/pixel1 Hasil2 = white2/pixel2 Hasil3 = white3/pixel3
Hasil1 < 0,35
Nomor 1
Hasil2 < 0,35
Nomor 2
Nomor 3 Hasil3 <0,35 Parkir penuh
stop Pixel 1
Pixel 2 Pixel 3 White1 White2 White3
Y Y
Y
N N
Pada Flowchart Gambar 3.13 untuk menentukan benda yang teridentifikasi merupakan mobil atau tidak maka terlebih dahulu total pixel putih (white1 untuk area 1, dst) dibagi dengan total keseluruhan pixel (pixel1 untuk area 1, dst) dari masing-masing area sehingga didapatkan prosentasi pixel putih pada tiap-tiap area. Kemudian nilai dari hasil bagi masing-masing area tersebut akan ditampung di variabel Hasil1 (untuk area 1), Hasil2 (untuk area 2) dan Hasil3 (untuk area 3). Setelah ditampung ke dalam variabel maka hasil akan dibandingkan dengan batas minimum prosentasi yang telah ditentukan yaitu 35% atau 0,35.
Jika prosentasi pixel putih pada area 1 kurang dari 0,35 maka area tersebut dianggap tidak ada mobil dan pada list nomor parkir akan ditampilkan nomor 1 untuk menginformasikan kepada pengguna parkir bahwa tempat parkir nomor 1 dapat ditempati. Jika prosentasi pixel putih lebih dari 0,35 maka area tersebut dianggap terdapat mobil dan akan dilanjutkan untuk mengeksekusi proses selanjutnya yaitu mengidentifikasi pada area yang lain. List parkir akan menginformasikan bahwa parkir telah penuh apabila prosentasi pixel putih pada semua area parkir melebihi 0,35. Berikut adalah potongan program untuk
3.11. Metode Pengujian dan Evaluasi Sistem
Untuk mengetahui apakah aplikasi yang dibuat dapat berjalan sesuai yang diharapkan, maka akan dilakukan pengujian dan evaluasi sistem untuk setiap tahapan-tahapan dalam pembuatan aplikasi. Dimulai dari streaming citra, update citra kondisi parkir, menentukan koordinat pada tiap-tiap area, akses pixel,
Backgorund Subtraction, thresholding, penghitungan pixel putih dan identifikasi
benda.
3.11.1.Pengujian Streaming Citra
Untuk mengetahui apakah data citra sudah dapat diakses langsung melalui Kamera, maka dilakukan pengujian dengan cara menjalankan (running) program pemanggilan kamera dari Visual C++ 2008, yaitu untuk mengakses console Kamera secara langsung dari program. Kemudian citra yang tampil akan diuji apakah dapat menampilkan data citra secara streaming.
3.11.2.Pengujian Update Citra Kondisi Parkir
3.11.3.Pengujian Penentuan Koordinat Pada Tiap Area
Untuk mengetahui posisi koordinat acuan pada masing-masing area maka program akan menampilkan window image berisi citra yang terdapat tanda persegi pada masing-masing area yang berfungsi untuk memberi batas area yang akan diproses datanya.
3.11.4.Pengujian Akses Pixel
Untuk mengetahui apakah program berhasil mengakses RGB dari tiap-tiap
pixel maka akan ditampilkan window image yang menyimpan hasil akses pixel
merah, hijau dan biru. Selain itu untuk mendukung pengujian maka output nilai pixel RGB juga ditampilkan.
.
3.11.5.Pengujian Background Subtraction
Untuk pengujian metode Background Subtraction, dilakukan dengan mengurangkan data citra sampel dengan citra update. Hasil subtraksi akan disimpan pada frame. Untuk mengetahui apakah program berhasil melakukan subtraksi maka akan ditampilkan 3 window image hasil subtraksi (hasil subtraksi area 1, area 2 dan area 3).
3.11.6.Pengujian Thresholding
biner. 3 window image tersebut meliputi window image untuk area 1, area 2 dan area 3.
3.11.7.Pengujian Penghitungan Pixel
Untuk pengujian proses penghitungan pixel maka ditampilkan output hasil perhitungan sehingga dapat diketahui total pixel putih pada masing-masing area.
3.11.8.Pengujian Identifikasi Benda
Untuk pengujian proses identifikasi benda pada masing-masing area maka ditampilkan output berupa hasil bagi pixel putih dengan total pixel keseluruhan pada area. Selain itu juga ditampilkan output berupa list nomor tempat parkir yang masih kosong.
3.11.9.Evaluasi Sistem Keseluruhan
Setelah melalui seluruh proses pengujian di atas maka perlu dilakukan pengujian sistem secara keseluruhan. Dimulai dari melihat data citra yang ditangkap oleh Kamera, dan melihat tampilan data citra yang ditampilkan window
image. Setelah itu, melalui tahap update citra, yaitu ketika waktu sistem
BAB V
PENUTUP
dari hasil uji coba yang telah dilakukan, maka dapat diambil kesimpulan saran-saran dan kesimpulan dari hasil yang diperoleh.
5.1. Kesimpulan
Adapun kesimpulan yang dapat dituliskan dari hasil sistem yang telah dibuat antara lain sebagai berikut:
1. Program dapat mengetahui tempat yang yang terisi penuh dan kosong. Selain itu ketika kondisi seperti terdapat orang berdiri di tempat parkir yang kosong maka program tetap menganggap tempat tersebut kosong. Untuk sistem ini ditentukan batas minimal presentase pixel putih sebesar 35% yang didapatkan dari beberapa pengujian (pengujian untuk mendapatkan hasil yang akurat). 2. Metode Motion Detection dapat diimplementasikan pada pendeteksian tempat
adanya ada pergerakkan benda di area tersebut menggunakan kamera. Dimana ketika terdeteksi adanya suatu pergerakkan pada area parkir maka sistem tidak akan mengeksekusi program namun jika tidak terdeteksi adanya suatu pergerakkan maka sistem akan di eksekusi.
dan 3 terdapat mobil, parkir area 3 terdapat mobil, parkir area 1,2 dan 3 terdapat mobil, parkir area 1 dan 2 terdapat mobil sedangkan di area 3 mobil masih belum parkir sepenuhnya, parkir area 2 dan 3 terdapat mobil sedangkan di area 1 terdapat objek selain mobil, parkir area 2 kosong sedangkan area 3 terdapat mobil dan area 1 terdapat objek sebesar mobil.
5.2. Saran
Saran yang dapat diberikan untuk mengembangkan sistem ini sebagai berikut:
1. Dalam pengambilan citra sampel maupun citra update, disarankan untuk mencoba konsep panorama sehingga citra yang terambil bisa lebih banyak dan dapat menghemat jumlah kamera yang dibutuhkan.
2. Sebaiknya kamera dibuatkan rel atau lintasan sehingga dapat mengambil gambar dengan berjalan dari ujung satu ke ujung lainnya untuk mendukung diterapkannya konsep panorama.
3. Pada sistem ini sebaiknya dapat dikembangkan juga pada tempat parkir
outdoor dengan keadaan cahaya yang selalu berubah-ubah dan tempat parkir
motor.
DAFTAR PUSTAKA
Askari, Azikin. 2005. Kamera Pengawas Berbasis Open Source. Jakarta: Elexmedia Komputindo.
Basuki, A. 2005 Grayscale. Politeknik Elektronika Negeri Surabaya
Awcock, G.W. 1996. Applied ImageProcessing.Singapore.McGraw-Hill Book. Budiarso , DW. 2010. Sistem Pendeteksi Aktivitas Kendaraan Pada Area Parkir
Dengan Jaringan Multi-Camera.
Bradsky G dan Kaehler A. 2008. Learning OpenCV. U.S.A : O’Reilly Media. Inc. Munir, Rinaldi. 2004. Pengolahan Citra Digital dengan Pendekatan Algoritmik.
Bandung : Informatika Bandung.
Nixon dan Aguado. 2002. Deteksi Tepi Unsur Pada Citra. Universitas Sumatera Utara.
Saputra, Nata. 2010. Membuat Gambar Menjadi Grayscale (VB net). Saphiro L dan Sthockman G. 2000. Computer Vision. The University Of
Washington.
Taylor dan Francis. 2007. Color Image Processing Method And Application. Boca Raton : CRC Press.
Umbaugh, Scoot. 1998. Computer Vision and Image Processing. U.S.A : Prentice Hall, Inc.
Basuki, A. 2007 Pengantar Pengolahan Citra. Politeknik Elektronika Negeri Surabaya.
Wijaya, MC. 2009. Mencari Nilai Threshold Yang Tepat Untuk Perancangan
Pendeteksi Kanker Trofoblas. Fakultas Teknik Universitas Kristen