Prototipe Pengendali Ketinggian Air Pada Tangki Penampung
Menggunakan SMS
TUGAS AKHIR
Laporan ini disusun untuk memenuhi salah satu Syarat dalam Menempuh Pendidikan Program Sarjana di Jurusan Teknik Elektro
Disusun Oleh : MULKY SOPRIMA
1.31.04.013
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
ABSTRAK
Prototipe pengendali ketinggian air pada tangki penampung menggunakan sms adalah sebuah sistem yang mampu mengontrol ketinggian air pada tangki penampung dengan cara mengendalikan pompa pengisi air dan pompa pengeluaran air. Jika permukaan air telah mencapai ketinggian yang ditentukan oleh operator maka pompa pengisi akan berhenti bekerja, jika permukaan air telah mencapai batas bawah maka pompa akan dihidupkan kembali oleh operator untuk melakukan pengisian dan jika diperlukan untuk menguras tangki penampung atau untuk keperluan tertentu maka pompa akan diberhentikan.
pengendalian pompa pengisi dan penguras air ini dapat dilakukan jauh dari plant atau tempat tangki penampung tersebut berada, yaitu dengan melalui SMS dari handphone. SMS dari Modem GSM dikirim ke PC(komputer) yang sudah ter-install aplikasi pengendali ketinggian air, data SMS tersebut diolah oleh PC menjadi sebuah instruksi yang selanjutnya dikirim kerangkaian mikrokontroler dan mikrokontroler akan mengerjakan sesuatu sesuai dengan instruksi tersebut dan SRF04 berfungsi untuk memberikan kondisi air didalam tangki tersebut sudah mencapai batas atas atau bawah dan data tersebut dikirim kerangkaian mikrokontroler, sedangkan relay berfungsi untuk mengaktif kan pompa isi atau kuras sesuai instruksi dari mikrokontroler.
ABSTRACT
Prototype controlling water leves in stroge tanks using SMS is a system capable of controlling the water level in the reservoir by controlling the filler pump water and water discharge pump. If the water level has reached a height which is determined by the operator will fill the pump stop working, if the water level has reaced the lower limit then the pump will be revived by the operator to perform charging and if necessary to drain the tank or for a particular purpose then pump will be dismissed.
Dengan menyebut
puji dan syukur penulis panjatkan
melimpahkan rahmat serta
menyelesaikan tugas akhir
Pada Tangki Penampung M
sistematika penulisan, sumber
Walaupun demikian, penulis
yang bermanfaat bagi pen
penulis panjatkan kehadirat Allah Subhannahu Wata’ala
serta hidayah-Nya kepada penulis, sehingga penulis
tugas akhir yang diberi judul ”Prototipe Pengendali Ketinggian
Pada Tangki Penampung Menggunakn SMS”. Adapun maksud dari penyusunan tugas
bertujuan untuk menyelesaikan studi program S1 dan
dalam menempuh ujian sarjana program studi Teknik
Universitas Komputer Indonesia (UNIKOM) Bandung.
menyadari bahwa tugas akhir ini masih jauh dari kata
keterbatasan penulis, baik dalam penyajian materi, maupun
penulisan, sumber bacaan, pengetahuan dan pengalaman
demikian, penulis telah berusaha dan mencoba memberikan
yang bermanfaat bagi penulis khusunya dan bagi pembaca umumnya.
kesempatan ini, tidak lupa penulis ucapkan terimakasih kepada
membantu kelancaran dalam penyelesaian laporan ini,
lagi Maha Penyayang,
Wata’ala yang telah
sehingga penulis dapat
Pengendali Ketinggian Air
ri penyusunan tugas
memberikan karya tulis
terimakasih kepada semua
1. Bapak Dr. Ir. Eddy Suryanto Soegoto, M.Sc sebagai Rektor UNIKOM Bandung.
2. Bapak Dr. Arry Ahmad Arman sebagai Dekan Fakultas Teknik dan Ilmu Komputer UNIKOM Bandung.
3. Bapak Muhammad Aria, MT. Sebagai Ketua Jurusan Teknik Elektro UNIKOM Bandung dan pembimbing penulis tugas akhir ini.
4. Ibu Tri Rahajoeningroem, MT sebagai Koordinator Tugas Akhir Program Studi Teknik Elektro UNIKOM Bandung.
5. Bapak dan Ibu DosenJurusan Teknik Elektro UNIKOM Bandung yang telah membekali ilmu pengetahuan kepada penulis selama menuntut ilmu di
UNIKOM Bandung.
6. Ibu Meryselaku sekretaris Jurusan Program Studi Teknik Elektro UNIKOM Bandung.
7. Kedua Orang Tuaku MUHKLIS JB dan MARNI ELVITA Kaka MUCHEL SOPRIMA Ade MUTIARA SOPRIMAserta Keluargaku yang selalu memberikan dorongan moril dan materi serta do’a kepada penulis
selama mengikuti perkuliahan di UNIKOM Bandung.
8. Keluarga besar Almarhummah Shinta Wijaya, Keluarga V_man, Eceng Gondok, Teman-Teman dan sahabat Mulky Soprima dimana pun berada yang selalu memberi semangat dan doa selama mengikuti perkuliahan di
Jurusan Teknik Elektro UNIKOM Bandung.
9. Semua pihak yang telah membantu penulis dalammenyelesaikan tugas akhir
Akhir kata dengan kerendahan hati, penulis memanjatkan do’a kehadirat
Allah Subhanahu Wata’ala semoaga amal dan baik budi yang telah mereka
berikan kepada penulis mendapat pahala dari-Nya. Amin.
Bandung, Agustus 2011
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Perkembangan teknologi kali ini sangatlah cepat, hal ini dapat dilihat dari beberapa perangkat yang dipakai oleh manusia sehari-hari, dalam perangkat tersebut
menyajikan fasilitas yang mengutamakan kemudahan pemakaian dan serba otomatis. Perubahan kebudayaan inilah perangkat otomatis, monitoring dan kontroling perlu diperhatikan dan dipelajari, salah satunya adalah pengendali ketinggian air pada
tangki penampung menggunakan SMS dengan studi kasus di Perum Jasa Tirta (PJT) II Jatiluhur Purwakarta.
Saat ini pengelolaan bak penampung yang digunakan di PJT II Jatiluhur masih manual, yaitu mengisi dan membuang air dilakukan langsung oleh operator, proses mengisi bak penampung terdapat dua cara yaitu menghidupkan atau
mematikan pompa air dan pemanfaatan medan tanah yang berbukit-bukit. Selain itu operator kesulitan dalam memprediksi kebutuhan air masyarakat yang fluktuatif
sehingga harus melakukan pemeriksaan ketinggian air secara rutin langsung ke lokasi, karena hal itulah proses pengendalian air dalam bak penampung berlangsung lambat dan kadang tidak terkendali. Hal ini tidak sebanding dengan kebutuhan
konsumen akan air yang terus meningkat, maka tuntutan terhadap pelayanan air harus berlangsung cepat dan terkendali. Seperti yang kita ketahui bahwa jika ingin
dilakukan secara cepat dan terorganisasi. Dengan adanya masalah-masalah tersebut,
judul yang diangkat dalam tugas akhir ini adalah : ”Prototipe Pengendali
Ketinggian Air Pada Tangki Penampung Menggunakan SMS”.
1.2 Rumusan Masalah
Permasalahan dalam pembuatan tugas akhir ini adalah
1. Bagaimana agar dapat mengontrol pengisian air dan pengurasan air menggunakan sensor SRF04 sebagai pendektesi ketinggian level air.
2. Bagaimana memonitoring dan pengendalian ketinggian level air menggunakan software Borland Delphi 7.0
3. Modem GSM sebagai penerima dan pengirim instruksi melalui SMS untuk
melakukan pengendalian.
4. Bagaimana perancangan program Atmel AT89S51 menggunakan Pinnacle 5.2
1.3 Tujuan Penelitiian
Sesuai dengan permasalahan di atas, maka tujuan penelitian Tugas Akhir ini
yaitu:
1. memberikan kemudahan dalam pengendalian dan monitoring ketinggian air pada tangki penampung.
1.4 Batasan Masalah
Batasan masalah dalam tugas akhir ini agar pembahasan tidak menyimpang dari permasalahan yang ada, maka penulis membatasinya.
Batasan- batasan masalah tersebut diantaranya:
1. Membuat rangkaian pompa pengisian dan pengurasan.
2. Untuk instuksi pengendalian mengunakan SMS dan manual dari PC yang
sudah ter-instal aplikasi ketinggian air.
3. Sensor yang digunakan untuk mendeteksi ketinggian air menggunakan
sensor ultrsonic SRF04.
4. Monitoring dan pengendalian menggunakan software Borland Delphi 7.0
1.5 Metodologi Penelitian
Adapun metode dan prosedur yang dilakukan dalam penelitian ini adalah sebagai berikut:
1. Eksplorasi
Melakukan pencarian ilmu pendukung penelitian dengan melakukan :
1) Studi Literatur
Mempelajari teori mengenai topik yang diangkat dan membuat suatu kesimpulan dari hasil studi tersebut.
Melakukan percobaan dengan menguji komponen-komponen elektronik
pendukung prototipe, jenis pompa dan perangkat lunak dalam mikrokontroler atau PC (personal computer). Pembuatan perangkat lunak dan perangkat keras
tersebut hasil dari studi literatur, diskusi dan observasi. 3) Diskusi
Berdiskusi atau konsultasi dengan pihak yang dianggap mampu membantu
dalam pembuatan sistem pengendali. 2. Perancangan
Merancang sistem perangkat lunak dan perangkat keras sesuai tahap yang telah dilakukan.
3. Analisis
Mengkaji hasil pengumpulan data dan informasi untuk mengetahui kebutuhan, perilaku dan lingkup sistem pengendali yang akan dibangun.
1.6 Sistematika Penulisan
Dalam penyusunan laporan Tugas Akhir ini, dibagi menjadi beberapa bab pembahasan, yaitu :
BAB I PENDAHULUAN
Bab ini berisi penjelasan mengenai latar belakang masalah, tujuan, batasan
masalah, metodologi penelitian, serta sistematika penulisan.
Bab ini berisi mengenai teori-teori yang berhubungan dengan permasalahan
yang diangkat.
BAB III PERANCANGAN SISTEM
Bab ini menjelaskan perancangan sistem yang dimulai dari perancangan perangkat lunak untuk PC serta mikrokontroler dan perancangan rangkaian elektronik
pengendali.
BAB IV ANALISIS SISTEM
Bab ini berisi uraian mengenai analisis sistem yang sudah ada (existing
sistem), melakukan analisis sistem yang akan dibangun, analisis rangkaian elektronik pengendali dan kesimpulan analisis sistem
BAB V KESIMPULAN DAN SARAN
Bab ini terdiri dari kesimpulan dan beberapa saran hasil dari penelitian Tugas
BAB II DASAR TEORI
2.1 Sistem Pengendali
Dalam sistem pengendali ini terdiri dari alat mekanik dan elektronik. Sistem
pengendali dibagi menjadi dua, yaitu loop terbuka dan loop tertutup.
2.1.1 Sistem Kendali Loop Terbuka
Sistem kendali terbuka adalah sistem yang berhubungan dan terpengaruh
dengan lingkungan luarnya. Sistem ini menerima masukan dan menghasilkan
keluaran untuk lingkungan luar atau subsistem yang lainnya. Karena sistem sifatnya
terbuka dan terpengaruh oleh lingkungan luarnya, maka suatu sistem harus
mempunyai suatu sistem pengendali yang baik.
Walaupun tidak memberikan umpan balik sebagai pembanding untuk validasi,
sistem kendali terbuka masih tetap memungkinkan untuk menyelesaikan perintah
dengan baik asalkan objek terkendali tidak mengalami perubahan yang tidak
terpredeksi sebelumnya.
Sistem pengendalian dengan loop terbuka lebih sederhana dan lebih murah
dari pada loop tertutup yang lebih rumit, dengan catatan implementasinya harus
disesuaikan pada situasi dimana semua pengaruh pada objek terkendali dapat
Gambar 2.1Diagram Blok untuk Kendali Terbuka
Sistem pengendali sangat berkaitan erat dengan kemajuan teknologi
komputer. Dengan menggunakan suatu bahasa pemrograman tertentu komputer
memungkinkan untuk dapat mengendalikan kinerja peralatan lain, sehingga dapat
diperintah sesuai dengan kondisi yang diinginkan.
2.1.2 Sistem Kendali Tertutup
Sistem tertutup merupakan sistem yang tidak berhubungan dan tidak
terpengaruh dengan lingkungan luarnya. Sistem ini bekerja secara otomatis tampa
adanya turut campur tangan dari pihak diluarnya. Secara teoritis sistem tertutup ini
ada, tetapi kenyataannya tidak ada sistem yang benar-benar tertutup, yang ada
hanyalah relatively closed system(secara relatif tertutup, tidak benar-benar tertutup). Sistem kendali loop tertutup ini terdapat umpan balik dari sinyal sistem
terkendali yang berfungsi sebagai validasi hasil keluaran terhadap sinyal input.
Gambar 2.2Diagram Blok untuk Kendali Tertutup
Keterangan:
i : masukan referensi yang menentukan suatu nilai bagi sistem yang dikendalikan u : sinyal umpan balik dari keluaran
o : sinyal keluaran
2.2 Mikrokontroler Atmel AT89S51
Mikrokontroler ialah sebuah chip yang berfungsi sebagai pengontrol
rangkaian elektronik dan umumnya menyimpan program didalamnya.
Salah satu jenis mikrokontroler adalah Atmel AT89S51, AT89S51 ialah
mikrokontroler CMOS 8 bit dengan 4KB Flash Programmable and Erasable Read Only Memory (PEROM). Mikrokontroler ini mempunyai memori yang terdiri dari RAM internal dan Special Function Register. Produk keluaran Atmel ini memiliki 40 kaki. Dari 40 kaki yang tersedia, 32 kaki dibagi menjadi 4 buah pararel port. Port-port
tersebut yaitu P0, P1, P2 dan P3. Masing-masing port memiliki 8 kaki input/ output
yang berfungsi sebagai input dan output program kontrol. Bentuk mikrokontroler
AT89S51 dapat dilihat pada Gambar 2.3
Gambar 2.4
Selain kaki-kaki I/O
kaki yang lain, yaitu RST,
VCC.
Fungsi dari kaki-kaki tersebut
1. P0.0 – P0.7 Port
addres atau data ataupun Pada fungsi sebagai
Gambar 2.4Arsitektur Mikrokontroler
kaki I/O yang berjumlah 32 kaki, AT89S51 juga memiliki
itu RST, XTAL1, XTAL2, GND, ALE/PROG, EA/VPP,
kaki tersebut adalah :
P0.7 Port 0 dapat berfungsi sebagai I/O biasa, low order
delapan buah TTL input atau dapat diubah sebagai input dengan memberikan
logika 1 pada port tersebut.
2. P1.0 – P0.7 Port 1 berfungsi sebagai I/O biasa, low order multiplex addres atau data ataupun menerima kode byte pada saat Flash Programming. Port ini mempunyai internal pull up dan berfungsi sebagai input dengan memberikan
logika 1.
3. P2.0 – P2.7 Port 2 berfungsi sebagai I/O biasa atau high order address, pada saat mengakses memori secara 16 bit ( Movx @ DPTR ). Pada saat
mengakses memori secara 8 bit, ( Mov @Rn ) port ini akan mengeluarkan isi
dari P2 Special Function Register.
4. P3.0 (RXD) berfungsi untuk serial input, P3.1 (TXD) untuk serial output, P3.2
(INT0) untuk External Interrupt 0, P3.3 (INT1) untuk External Interrupt 1,
P3.4 (T0) untuk External Timer 0 Input, P3.5 (T1) untuk External Timer 1
input, P3.6 (WR) untuk External Data Memory Write Strobe, P3.7 (RD) untuk
External Data Memory Write Strobe.
5. RST (kaki 9) merupakan masukan reset (aktif tinggi), pulsa transisi dari
rendah ke tinggi me-reset mikrokontroler.
6. XTAL1 (kaki 19) dan XTAL2 (kaki 18) diperlukan untuk menghubungkan
mikrokontroler dengan kristal.
7. GND (kaki 20) merupakan ground sumber tegangan.
masuk ke dalam bus selama proses pemberian atau pengambilan intruksi
(fetching).
9. ALE/ PROG (kaki 30) adalah kaki yang mempunyai dua fungsi. Fungsi yang
pertama adalah Address Latch Enable (ALE) yaitu penahan alamat memori eksternal. Fungsi kedua yaitu sebagai pemberi sinyal atau pulsa input
pemrograman (PROG) selama proses pemrograman.
10. EA/ VPP (kaki 31) adalah kaki yang mempunyai dua fungsi . Fungsi pertama
adalah sebagai kaki External Access Enable (EA), yaitu kaki yang memberi sinyal kontrol untuk pembacaan memori program. Fungsi kedua sebagai
tegangan pemrograman (+12V) selama proses pemrograman (VPP).
11. VCC (kaki 40) merupakan sumber tegangan positif.
2.3 Organisasi Memori
Pada mikrokontroler AT89S51 terdapat dua macam memori, yaitu program memory dan data memory. Program memory adalah tempat untuk menyimpan program yang berisi intruksi-intruksi (intruction storage), sedangkan data memory adalah tempat untuk menyimpan data (data storage).
Program memory dapat berbentuk ROM internal dan eksternal, sedangkan data memory dapat berbentuk RAM internal dan eksternal.
Mikrokontroler AT89S51 mempunyai kemampuan pemrograman berulang
dengan flash memori. Dengan kemampuan ini AT89S51 ini dapat menyimpan dan
kali. AT89S51 mempunyai RAM internal dengan kapasitas 128x8 bit dengan
frekuensi pengoperasian hingga 24 MHz. Agar mikrokontroler dapat berkerja, maka
beberapa kaki mikrokontroler ini harus dihubungkan dengan komponen elektronika.
Berikut adalah rangkaian dasar mikrokontroler :
Gambar 2.5Rangkaian Dasar Mikrokontroler AT89S51
2.4 Program Pinnacle 52
Program pinnacle 52 merupakan suatu program yang dapat mensimulasikan
proses yang terjadi dalam mikrokontroler AT89S51 dan menampilkan
kondisi-kondisi pada memorinya serta dapat mengkompilasi program yang dibuat ke dalam
bentuk OBJ, LST dan HEX.
Berikut ini akan dijelaskan beberapa menu yang sering digunakan pada
terdapat beberapa menu utama, diantaranya: Menu File, Edit, View, Execute,
Simulator, Project, Tools, Options, Windows, dan Help.
Gambar 2.6 Tampilan menu utama program Pinnacle 52
Pembuatan program dilakukan pada editor. Setelah program selesai dibuat,
sebaik nya program disimpan dan selanjutnya dilakukan kompilasi agar diperoleh file
OBJ. Atau langsung dilakukan kompilasi dan link agar diperoleh file OBJ dan HEX
(file HEX digunakan untuk dimasukan ke dalam IC AT89S51).
2.4.1 Kompilasi Program
Proses kompilasi dapat dilakukan melalui menu project kemudian pilih
Compile <namafile.asm> atau langsung menekan tombol F2. Berikut ini contoh
tampilan hasil kompilasi file Coba.asm.
2.4.2 Simulasi Program
Selanjutnya program dapat disimulasikan melalui menu execute kemudian pilih Run atau langsung menekan tombol F5. Selain itu simulasi dapat dilakukan
secara per instruksi dengan menekan tombol F8 untuk setiap instruksi.
Menu View digunakan untuk menampilkan beberapa tampilan seperti register,
port, timer dan internal RAM. Berikut tampilan yang dapat dipanggil melalui menu
View.
Gambar 2.8Beberapa Tampilan dari menu View
2.4.3 Mode Pengalamatan
digolongkan kedalam beberapa kelompok, antara lain: direct, indirect, dan immediate.
1. Mode pengelamatan segera ( Immediate Addressing Mode)
Yaitu proses mengisi suatu alamat memori dengan suatu nilai tertentu. Cara ini
biasanya menggunakan konstanta.
Contoh : mov A, #30h
Nilai 30h akan langsung diisikan kedalam accumulatorA 2. Mode pengalamatan langsung ( Direct Addressing Mode)
Yaitu proses sebuah lokasi memori secara langsung dengan menggunakan
alamatnya. Cara ini dipakai untuk menunjuk data yang berada disuatu lokasi
memori dengan cara menyebut lokasi ( alamat ) tempat data tersebut berada.
Contoh : Mov A, 47h
Isi dialamat 47h akan langsung diisikan ke accumulator
3. Mode pengalamatan tidak langsung ( Indirect Addressing Mode )
Yaitu proses mengakses alamat secara tidak langsung. Cara ini dipakai untuk
mengakses data yang berada didalam memori, tetapi lokasi memori tidak disebut
secara langsung tapi di-“titip”-kan keregister lain.
Contoh : mov A, @R0
accumulator A akan terisi data yang berada dialamat yang ditunjukan oleh register R0.
tanda “@” dipakai untuk menandai lokasi memori yang tersimpan didalam R0.
Yaitu proses mengakses memori dengan label antara R0 sampai R7
Contoh : mov A, R0
Data dalam register serbaguna R0 disalin ke accumulatorA. 5. Mode pengalamatan bit ( Bit Addressing Mode )
Pada pengalamatan ini, operand menunjuk ke alamat internal RAM atau register
fungsi khusus yang dapat dialamat secara bit (bit addressable)
Contoh : setb P3.1 : lakukan set pada port 3 bit ke 1
2.4.4 Pengarah Assembler
1. ORG ( Origin)
Digunakan untuk mengarahkan lokasi tempat instruksi yang ada dibawah nya.
Contoh :
ORG 100 h : alamat awal untuk instruksi dibawah berada dialamat 100h
MOV A, #10h : instruksi mov A, #10h berada di alamat 100h
2. END
Digunakan sebagai tanda akhir dari program assembler
3. BIT
Digunakan untuk mendefinisikan sebuah lambang yang menunjuk kelokasi bit
Contoh :
key_1 bit P1.0 : konstansta “key_1” didefinisikan dengan port 1 bit 0
2.4.5 Instruksi Transfer Data
1. Mov A,Rn
Melakukan pemindahan data dari Rn ( R0…..R7 ) menuju ke akumulator A
Contoh :
Mov A, R1 : Data dari R1 pindah ke akumulator A
2. Mov A, direct
Melakukan pemindahan data dari alamat langsung ke akumulator A
3. Mov Rn, A
Melakukan pemindahan data dari akumulator A menuju ke Rn ( R0….R7 )
4. Mov Rn, direct
Melakukan pemindahan data dari alamat langsung menuju ke Rn ( R0…R7)
Contoh :
5. Mov Rn, #Data
Melakukan pemindahan data dari immediatemenuju ke Rn ( R0…R7 )
Contoh :
Mov R7, #05h : Data 05h dipindah ke dalam R7
2.4.6 Contoh Program
Org 100h
Mov A, #16h : Salin 16 H ke Akumulator
Mov R1, A : Salin data A ke R1
Mov A, #32h : Salin 32 H ke Akumulator
Mov @R1, #64h : Salin data 64h ke alamat yang ditunjukan R1
Table 2.1 Instruksi Bahasa Assembly
7 JB Melompat jika bit diatur
8 DJNZ Pengurangan, melompat jika tidak nol 9 CJNE Bandingkan, melompat jika tidak sama
10 JMP Melompat
18 JNB Melompat jika bit tidak diatur
19 ANL Logis
20 CPL Melengkapi (complement ) 21 DEC Pengurangan ( decrement ) 22 INC Kenaikan ( increment )
23 JBC Melompat jika mengatur sedikit, maka bit yang jelas
24 JNC Melompat jika membawa tidak diatur 25 JNZ Melompat jika akumulator tidak nol 26 JZ Melompat jika akumulator adalah nol 27 MOVC Memindah kan kode byte
28 MOVX Bergerak byte eksternal
29 ORL Logical OR
30 POP Pop nilai dari stack
31 PUSH Mendorong nilai ke dalam stack
32 SUBB Menguragi
33 XRL Logis eksklusif OR
34 RL, RLC Akumulator memutar kekiri 35 RR, RRC Memutar akumulator kekanan
2.5 Ultrasonik ( SRF04 )
Ultrasonik adalah merupakan sensor yang berisi transmitter dan receiver ultrasonic, sensor dapat digunakan untuk mengukur jarak. Sensor ini mengukur jarak
dengan cara menghitung selisih waktu antara saat pemancaran sinyal dan saat
penerimaan sinyal pantul. Seperti diketahui, kecepatan rambat suara diudara adalah
34399,22 cm/detik, berarti untuk merambat sejauh 1 cm suara membutuhkan waktu
29 mikro detik. Misalkan waktu antara pengiriman dan penerimaan sinyal ultrasonic
adalah 5800 mikro detik, maka jarak antara sensor dan benda ( penghalang ) adalah
100 cm. ( 2 x 100 cm x 29 mikro detik/cm = 5800 mikro detik ).
Gambar 2.9Prinsip kerja sensor jarak Ultrasonik
SRF04 hanya menggunakan 2 port I/O untuk berhubungan dengan
mikrokontroler, sehingga sangat ideal untuk aplikasi-aplikasi robotika, SRF04 dapat
mengukur jarak antara 3 cm sampai 3 m, dan dapat mengukur benda dengan diameter
3 cm pada jarak kurang dari 2 meter.
Pulsa Ultrasonik yang dikirim oleh SRF04 adalah sinyal ultrasonic dengan
benda penghalang, maka pulsa ini akan dipantulkan kembali dan diterima kembali
oleh penerima ultrasonic. Dengan mengukur selang waktu antara saat pulsa dikirim
dan pulsa pantul diterima, maka jarak benda penghalang bisa dihitung.
Apabila PI ( triger pulsa input ) diberi logika 1( high )selama minimal 10 uS
maka SRF04 akan memancarkan sinyal ultrasonic, setelah itu pin PO ( echo pulsa
output ) akan berlogika high selama 100 uS – 18 mS. ( tergantung jarak sensor dan
penghalang ) dan apabila tidak ada penghalang maka PO akan berlogika 1 selama
kurang lebih 38 mS.
Gambar 2.10Timing diagram SRF04
Misalkan lama Echo Pulse adalah T, maka untuk mengetahui jaraknya dapat
diketahui dengan cara membagi T dengan 58 (T/58) untuk satuan senti meter dan
dibagi dengan 148 (T/148) untuk satuan inchi. Misalkan panjang Echo pulse adalah
2.6 Relay
Relay merupakan komponen elektronika yang prinsip kerjanya hampir sama
dengan saklar. Relay mempunyai lima kaki. Dua kaki koil dan tiga kaki saklar. Kaki
koil dalam pemasangannya boleh terbalik. Kaki saklar terdiri dari kaki normally open (NO), normally close (NC) dan common (COM).
Dalam keadaan arus listrik mengalir (koil hidup), maka kaki COM akan
terhubung ke kaki NO dan sebaliknya dalam keadaan koil relay mati maka kaki COM
akan terhubung ke kaki NC. Relay dapat digunakan untuk memisahkan rangkaian
yang satu dengan yang lainnya dengan atau tanpa sambungan sama sekali. Bila arus
masuk ke kaki relay hal ini mengakibatkan koil relay hidup dan menimbulkan medan
magnet. Medan magnet ini yang kemudian akan menggerakan saklar. Gambar simbol
relay dapat dilihat pada Gambar 2.11
koil saklar
Transistor adalah alat semikonduktor yang dipakai sebagai penguat arus listrik
dan mempunyai tiga kaki, dengan prinsip kerja suatu arus listrik atau tegangan listrik
kecil yang dipasang pada satu kaki dapat mengontrol arus yang melewati kedua kaki
transistor yaitu transisto
Negatif Positif).
Gambar 2.12Simbol Transistor PNP
Pada jenis NPN, kaki
jenis PNP berlaku hal sebaliknya.
yang dapat diatur karena
arus. Transistor mengatur
mikrokontroler dengan alat
pin yaitu RXD dan
komputer/perangkat lainnya,
perangkat lainnya. Standar
mempunyai standar tegangan
transistor NPN (Negatif Positif Negatif) dan transistor
Simbol Transistor PNP Gambar 2.13Simbol Trans
NPN, kaki emittor selalu lebih negatif terhadap kolektorn
hal sebaliknya. Transistor dapat juga disebut sebagai penahan
karena dengan transistor kita dapat mempengaruhi kekuatan
mengatur arus secara elektronis. Tidak ada suatu tombol
gunakan untuk pengaturannya. Sebagian transistor disusun dalam
erial Port
serial merupakan hal yang penting dalam sistem
komunikasi serial kita dapat dengan mudah menghubungkan
dengan alat lainnya. Port serial pada mikrokontroler terdiri
dan TXD, RXD berfungsi untuk menerima
komputer/perangkat lainnya, TXD berfungsi untuk mengirim data ke komputer
Standar komunikasi serial untuk komputer ialah RS
standar tegangan yang berbeda dengan serial port mikrokontroler transistor PNP (Positif
Simbol Transistor NPN
terhadap kolektornya. Pada
sebagai penahan arus
mempengaruhi kekuatan suatu
tombol atau lainnya
dalam bentuk kecil
sistem embedded, mudah menghubungkan
mikrokontroler terdiri atas dua
menerima data dari
data ke komputer atau
ialah RS-232, RS-232
sehingga agar sesuai dengan RS-232 maka dibutuhkan suatu rangkaian level
converter, IC yang digunakan bermacam-macam, tetapi yang paling mudah dan
sering digunakan ialah IC MAX232.
Hardware pada komunikasi serial port dibagi menjadi 2 (dua) kelompok yaitu
Data Communication Equipment (DCE) dan Data Terminal Equipment (DTE). Contoh dari DCE ialah modem, plotter, scanner dan lain lain sedangkan contoh dari
DTE ialah terminal di komputer. Spesifikasi elektronik dari serial port merujuk pada
Electronic Industry Association(EIA) :
1. “Space” (logika 0) ialah tegangan antara + 3 hingga +25 V.
2. “Mark” (logika 1) ialah tegangan antara –3 hingga –25 V.
3. Daerah antara + 3V hingga –3V tidak didefinisikan /tidak terpakai
4. Tegangan open circuit tidak boleh melebihi 25 V.
5. Arus hubungan singkat tidak boleh melebihi 500mA.
Konektor port serial terdiri dari 2 jenis, yaitu konektor 25 pin (DB25) dan 9
pin (DB9) yang berpasangan (jantan dan betina).
Gambar 2.14Serial Port DB9
Setiap kaki dari serial port DB9 ini mempunyai fungsi masing-masing yang
Tabel 2.2Keterangan Sinyal dan Kaki Serial Port DB9
Nama Sinyal Arah Sinyal Nomor Kaki Konektor Data Carrier Detect (DCD) Dari DCE 1
Received Data (RD) Dari DCE 2 Transmitted Data (TD) Dari DTE 3
DTE Ready (DTR) Dari DTE 4
Ground - 5
DCE Ready (DSR) Dari DCE 6
Request to Send (RTS) Dari DTE 7 Clear to Send (CTS) Dari DCE 8 Ring Indicator (RI) Dari DCE 9
Keterangan mengenai fungsi saluran pada konektor DB9 adalah sebagai
berikut:
1. Data Carrier Detect, dengan saluran ini DCE memberitahukan ke DTE bahwa pada terminal masukkan ada data masuk.
2. Receive Data, digunakan DTE menerima data dari DCE. 3. Transmitted Data, digunakan DTE mengirimkan data ke DCE.
4. Data Terminal Ready, pada saluran ini DTE memberitahukan kesiapan terminalnya.
5. Signal Ground, saluran ground.
6. DCE Ready, sinyal aktif pada saluran ini menunjukkan bahwa DCE sudah siap. 7. Request To Send, dengan saluran ini DCE diminta mengirim data oleh DTE. 8. Clear To Send, dengan saluran ini DCE memberitahukan bahwa DTE boleh mulai
mengirim data.
2.9 Short Message Service (SMS)
SMS merupakan salah satu layanan data service GSM yang menyediakan fasilitas untuk menyampaikan pesan singkat antara Mobile Station (MS) melalui Service Centre (SC) atau yang disebut dengan Short Message Service Centre (SMSC). SMSC berfungsi menyampaikan pesan antara MS danShort Message Entity (SME).
SMS adalah pesan yang terbatas besarnya (pesan singkat) yang dapat dikirim
atau diterima oleh sebuah MS yang berupa data dalam bentuk string atau tesk. Tesk tersebut dapat terdiri dari kombinasi kata-kata, nomor-nomor atau penggaubungan
huruf dan angka, yang mempunyai panjang maksimum 160 karakter dengan
menggunakan huruf latin.
Dalam mengirim dan menerima data sms, digunakan standar ETSIGSM
03.38, dimana data yang tertulis dilayar handphone berupa huruf atau angka yang kemudian diterjemahkan menjadi data 7-bit (septet). Data 7 bit tersebut menurut standar ETSIGSM 03.38 diolah dulu menjadi data 8 bit (octet), baru dikirimkan, dimana besarnya data 7 bit maksimum adalah 160 karakter yang jika diolah menjadi
data octetakan menjadi 140 octet.
2.10 AT Command
AT Command merupakan satu set perintah yang dapat digunakan untuk
mengoperasikan GSM mobile phone melalui serial interface (kabel data). Menurut formatnya perintah-perintah yang diberikan harus selalu diawali dengan ’AT’ dan
AT Command dapat digunakan antara lain untuk menginstruksikan
perintah-perintah sebagai berikut :
1. Mengirim dan menerima SMS.
2. Mendapatkan informasi mengenai alat, misalnya nama manufaktur, nomor IMEI
dan lain-lain.
3. Mendapatkan status alat, misalnya status aktivitas, status regestrasi network, kekuatan sinyal dan status batrei.
4. Penulisan dan pencarian phonebook.
5. Mengembalikan dan menyimpan konfigurasi.
Tidak semua alat mengimplementasikan AT Command, pada umumnya
modem GSM lebih mendukung banyak AT Command. AT Command umumnya
ditulis dengan huruf besar, tetapi banyak pila modem GSM dan ponsel yang
mengizinkan penulisan AT Command dalam huruf besar maupun huruf kecil.
Terdapat dua tipe AT Command, yaitu basic command dan extended command. Basic commandadalah AT Command yang tidak menggunakan tanda ’+’, misalnya ATH, ATD dan ATA. Sebaliknya AT Command yang menggunakan tanda
’+’ merupakan extendedcommand. Setiap extended command memiliki paremeter atau perintah tes yaitu =?, yang akan mengembalikan informasi mengenai perintah
tersebut.
1. AT+CMGS
Perintah AT Command ini digunakan untuk mengirimkan SMS. Format yang digunakan adalah “AT+CMGS = <length> <CR> <PDU is given>”. Apabila pengiriman sukses dilakukan, format respon yang diterima adalah “+CMGS : <mr>”,
dengan “<mr>” adalah message reference dari SMSC. Sedangkan jika pengiriman gagal dilakukan, respon yang diterima adalah “+CMS error”.
2. AT+CMGR
Perintah ini digunakan untuk membaca sebuah SMS pada indeks tertentu. Format
yang digunakan adalah “AT+CMGR = <index>”. Apabila perintah ini berhasil diesekusi, format respon yang diterima adalah “+CMGR: <stat>,,<length><CR><LF><pdu>”. “<stat>”.
3. AT+CMGD
Perintah ini digunakan menghapus sebuah SMS pada memory SMS. Format yang digunakan adalah “AT=CMGD=<index>”, respon yang diterima adalah “OK/ERROR/+CMSERROR”
4. AT+CMGL
Perintah ini digunakan untuk membaca daftar SMS sesuai parameter tertentu. Format
Respon yang diterima adalah :
“+CMGL:<index>,<stat>,<oa/da>,[<alpha>],[<scts>][,<tooa/toda>,<length>]< CR><LF><data>[<CR><LF>
+CMGL:
<index>,<stat>,<da/oa>,[<alpha>],[<scts>][,<tooa/toda>,<length>]<
CR><LF>
<data>[...]] OK ”
Atau “+CMS ERROR : <err>”. “[<alpha>]”, adalah deretan alfanumerik yang merepresentasikan nomor pengirim atau penerima.
Yang terpenting adalah Anda mengetahui perintah AT Command untuk
terima, kirim, dan delete SMS. Kemudian perintah tersebut dimasukkan ke dalam
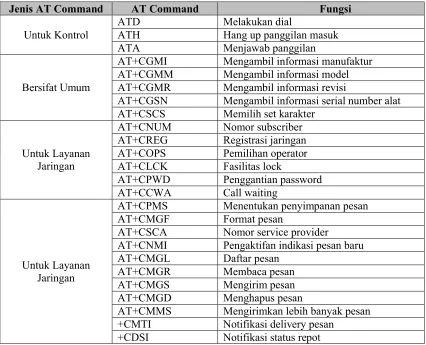
Tabel 2.3adalah daftar perintah dalam AT Command.
Jenis AT Command AT Command Fungsi
Untuk Kontrol
AT+CGSN Mengambil informasi serial number alat AT+CSCS Memilih set karakter
komputer harus diberikan program sehingga komputer yang terdiri dari perangkat
keras ini mampu membantu aktivitas pemakainya. Program adalah sekumpulan
instruksi-instruksi yang disimpan dalam memori dan kemudian dibaca, diterjemahkan
2.11.1 Borland Delphi
Delphi adalah suatu bahasa pemograman (development language) yang
digunakan untuk merancang suatu aplikasi program.
Delphi termasuk dalam pemrograman bahasa tingkat tinggi (high level lenguage). Maksud dari bahasa tingkat tinggi yaitu perintah-perintahnya programnya menggunakan bahasa yang mudah dipahami oleh manusia. Bahasa pemrograman
Delphi disebut bahasa prosedural artinya mengikuti urutan tertentu. Dalam membuat
aplikasi perintah-perintah, Delphi menggunakan lingkungan pemrograman visual.
Delphi merupakan generasi penerus dari Turbo Pascal. Pemrograman Delphi
dirancang untuk beroperasi dibawah sistem operasi Windows. Program ini
mempunyai beberapa keunggulan, yaitu produktivitas, kualitas, pengembangan
perangkat lunak, pola desain yang menarik serta diperkuat dengan bahasa perograman
yang terstruktur dalam struktur bahasa perograman Object Pascal.
Sebagaian besar pengembang Delphi menuliskan dan mengkompilasi kode
program di dalam lingkungan pengembang aplikasi atau Integrated Development Environment (IDE). Lingkungan kerja IDE ini menyediakan sarana yang diperlukan untuk merancang, membangun, mencoba, mencari atau melacak kesalahan, serta
mendistribusikan aplikasi. Sarana-sarana inilah yang memungkinkan pembuatan
prototipe aplikasi menjadi lebih mudah dan waktu yang diperlukan untuk
2.11.2 Beberapa keunggulan dari program Delphi adalah :
1. IDE (Integrated Development Environment) atau lingkungan pengembangan
aplikasi sendiri adalah satu dari beberapa keunggulan delphi, didalamnya terdapat
menu – menu yang memudahkan kita untuk membuat suatu proyek program.
2. Proses Kompilasi cepat, pada saat aplikasi yang kita buat dijalankan pada Delphi,
maka secara otomatis akan dibaca sebagai sebuah program, tanpa dijalankan
terpisah.
3. Mudah digunakan, source kode delphi yang merupakan turunan dari pascal,
sehingga tidak diperlukan suatu penyesuain lagi.
4. Bersifat multi purphase, artinya bahasa pemograman Delphi dapat digunakan untuk mengembangkan berbagai keperluan pengembangan aplikasi.
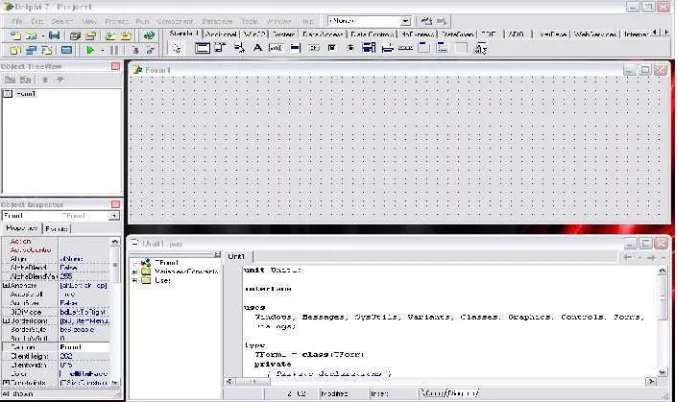
2.11.3 Tampilan Delphi
Berikut adalah gambar dari keseluruhan tampilan Delphi.
2.11.4 IDE (Integrated Development Environment)
Kemudian, hal yang paling pertama dalam mengenal Delphi adalah harus
mengetahui IDE. IDE (Integrated Development Environment) merupakan
lingkungan/wilayah dimana seluruh toolsatau komponen-komponen yang dibutuhkan untuk merancang atau membangun aplikasi program. Secara umum IDE Delphi di
kelompokkan kepada 8 bagian yaitu :
1. Main Menu
Merupakan penunjuk ke seluruh fasilitas yang disediakan aplikasi Delphi.
Gambar 2.16Menu Pemrograman Delphi
2. Toolbar / Speedbar
Merupakan Icon (Sortcut) yang dirancang untuk lebih memudahkan menjangkau
fasilitas yang ada pada Delphi.
Gambar 2.17Toolbar Pemrograman Delphi 3. Component Palette
Merupakan komponen-komponen VCL(Visual Component Library) yang
dikelompokkan kedalam tab-tab, komponen komponen inilah yang akan
Gambar 2.18Component Palette Pemrograman Delphi 4. Form Designer
Merupakan interface (antar muka) apalikasi yang akan dibangun, Form akan
menampung seluruh komponen yang akan digunakan dalam proses perancangan
sebuah aplikasi dengan Delphi.
Gambar 2.19Form Designer Pemrograman Delphi 5. Code Editor
Code editor merupakan tempat untuk menuliskan kode program menggunakan
bahasa object Pascal. Kode program tidak perlu di tulis secara keseluruhan karena
Gambar 2.20Code Editor Pemrograman Delphi
6. Code Explorer
Digunakan untuk memudahkan berpindah antar file unit di dalam jendela code
editor. Code explorer berisi daftar yang menampilkan semua tipe,class, properti ,
method, variabel global, rutin global yang telah didefinisikan di dalam unit. Saat
memilih sebuah item dalam code explorer, kursor akan berpindah menuju
implementasi dari item yang dipilih di dalam code editor.
7. Object inspector
Object inspector digunakan untuk mengubah properti atau karakteristik dari suatu
komponen. Terdiri dari 2 tab yaitu :
a. Properties
Digunakan untuk menentukan seting suatu objek. Satu objek memiliki
beberapa properti yang dapat diatur langsung dari object inspector maupun
melalui kode program. Seting ini mempengaruhi cara kerja objek tersebut saat
aplikasi dijalankan.
b. Event
Merupakan bagian yang dapat diisi dengan kode program tertentu yang
berfungsi untuk menangani event-event (berupa sebuah procedure) yang dapat
direspon oleh sebuah komponen.Event adalah peristiwa atau kejadian yang
diterima oleh suatu objek, misal : klik, drag, dan lain-lain. Event yang
diterima objek akan memicu Delphi menjalankan kode program yang ada
didalamnya. Misalnya ingin sesuatu dikerjakan pada saat form ditutup, maka
untuk menyatakan tindakan tersebut (berupa sebuah procedure) menggunakan
Gambar 2.22Object Inspector Pemrograman Delphi 8. Object Tree View
Object tree view berisi daftar komponen yang sudah diletakkan di form designer.
2.11.5 XCOMM
XComm adalah komponen tambahan seperti MSComm dengan fungsi yang
sama, XComm ini digunakan untuk komunikasi antara computer PC (personal computer) dengan handphone sebagai penerima SMS. XComm inilah yang mengatur dan membaca jika ada SMS masuk atau keluar dari handphone yang selanjut nya dikomunikasikan ke PC.
2.11.6 QCOMM
QComm adalah komponen tambahan yang terdapat pada Borland Delphi yang
menyediakan fasilitas komunikasi data melalui serial port, sehingga dapat
berkomunikasi dengan rangkaian elektronik mikrokontroler. MSComm inilah yang
BAB III
PERANCANGAN SISTEM
Perancangan dan pembuatan alat merupakan bagian yang terpenting dari
seluruh pembuatan tugas akhir. Pada prinsipnya perancangan dan sistematik yang
baik akan memberikan kemudahan-kemudahan dalam proses pembuatan dan
menganalisa suatu alat.
3.1 Perancangan Sistem
Prototipe pengendali ketinggian air pada tangki penampung menggunakan
sms adalah sebuah sistem yang mampu mengontrol ketinggian air pada tangki
penampung dengan cara mengendalikan pompa pengisi air dan pompa pengeluaran
air. Jika permukaan air telah mencapai ketinggian yang ditentukan oleh operator
maka pompa pengisi akan berhenti bekerja, jika permukaan air telah mencapai batas
bawah maka pompa akan dihidupkan kembali oleh operator untuk melakukan
pengisian dan jika diperlukan untuk menguras tangki penampung atau untuk
keperluan tertentu maka pompa akan diberhentikan.
Pengendalian pompa pengisi dan penguras air ini dapat dilakukan jauh dari
plant atau tempat tangki penampung tersebut berada, yaitu dengan melalui SMS dari handphone. SMS dari Modem GSM dikirim ke PC(komputer) yang sudah ter-install
instruksi yang selanjutnya dikirim kerangkaian mikrokontroler dan mikrokontroler
akan mengerjakan sesuatu sesuai dengan instruksi tersebut.
Gambar 3.1Blok Diagram
Dari gambar diatas dapat dijelaskan bahwa pengendalian pompa pengisi dan
penguras air ini dapat dilakukan jauh dari plant atau tempat tangki penampung
tersebut berada, yaitu dengan melalui SMS dari handphone. SMS dari Modem GSM
dikirim ke PC(komputer) yang sudah ter-install aplikasi pengendali ketinggian air,
data SMS tersebut diolah oleh PC menjadi sebuah instruksi yang selanjutnya dikirim
kerangkaian mikrokontroler dan mikrokontroler akan mengerjakan sesuatu sesuai
dengan instruksi tersebut dan SRF04 berfungsi untuk memberikan kondisi air
didalam tangki tersebut sudah mencapai batas atas atau bawah dan data tersebut
dikirim kerangkaian mikrokontroler, sedangkan relay berfungsi untuk mengaktif kan
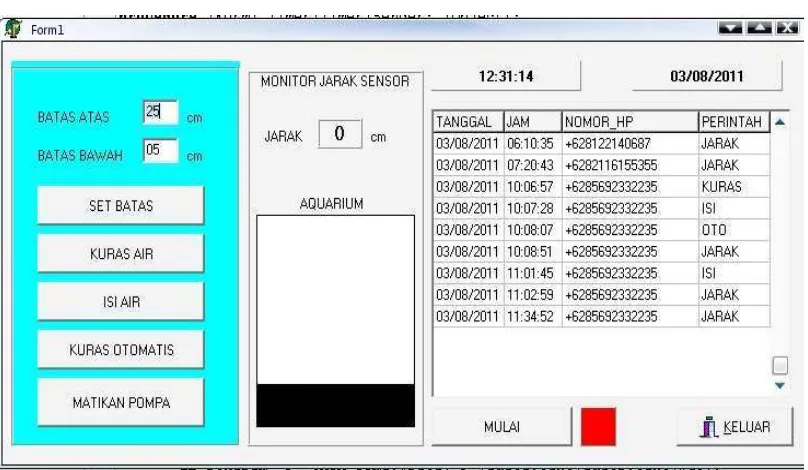
3.2 Perancangan Form
Gambar 3.2Rancangan From Monitoring
Keterengan :
1. SET BATAS berfungsi mengirimkan data batas atas air dan batas bawah air
ke mikrokontroler sehingga pada saat pengurasan data tersebut sebagai
batasnya
2. KURAS AIR berfungsi sebagai tombol manual mengaktifkan pompa kuras
3. ISI AIR berfungsi sebagai tombol manual mengaktifkan pompa isi air
4. KURAS OTOMATIS berfungsi sebagai tombol manual dimana pengurasan
dan pengisian dilakukan secara otomatis berdasarkan data set batas atas dan
bawah
5. MATIKAN POMPA berfungsi mematikan secara manual seluruh pompa yang
Table 3.1 Format SMS
NO Nama Perintah Penjelasan
1 OTO Untuk kuras dan Isi otomatis
2 KURAS Untuk Pengurasan
3 ISI Untuk Pengisian
4 OFF Untuk mematikan pompa
5 JARAK Kirim SMS jarak ke User
3.3 Koneksi Modem GSM dan PC
Modem GSM sebagai penerima intruksi melalui SMS untuk pengendalian,
komputer akan mengolah intruksi dalam SMS tersebut. Komunikasi antara modem
GSM dan komputer dapat menggunakan USB TO Serial DB9 yang disediakan.
Untuk membuat aplikasi SMS Server menggunakan AT command dan Delphi
dibutuhkan :
1. Modem GSM
2. USB TO Serial DB9
3. Komponen QCOMM
3.4 Perancangan Rangkaian Elektronik Pengendali
Dalam rangkaian elektronik ini terbagi dalam beberapa kelompok rangkaian
yang dapat dibedakan berdasarkan fungsinya masing-masing, yaitu rangkaian sensor
(input), rangkaian port serial, rangkaian dasar mikrokontroler, dan rangkaian untuk
pompa (output). Dari kelompok rangkaian ini digabungkan menjadi satu sehingga
dapat berkerja sesuai dengan tujuan dirancangannya rangkaian elektronik
mikrokontroler pengendali ketinggian air. Rangkaian ini bertugas melaksanakan
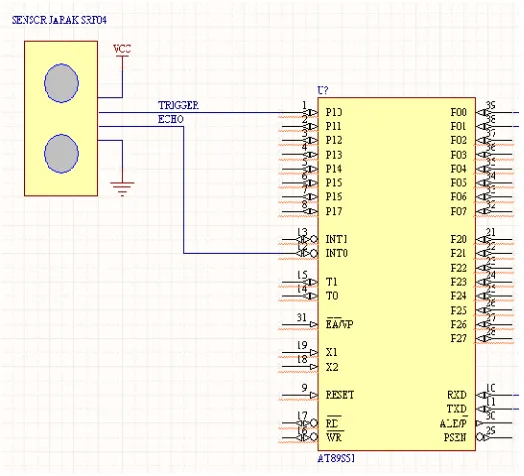
3.4.1 Rangkaian Sensor Menggunakan SRF04
SRF04 hanya menggunakan 2 port I/O untuk berhubungan dengan
mikrokontroler, sehingga sangat ideal untuk aplikasi-aplikasi robotika, SRF04 dapat
mengukur jarak antara 3 cm sampai 3 m, dan dapat mengukur benda dengan diameter
3 cm pada jarak kurang dari 2 meter.
Pulsa Ultrasonik yang dikirim oleh SRF04 adalah sinyal ultrasonic dengan
frekuensi 40 KHz sebanyak 8 periode setiap kali pengiriman. Ketika pulsa mengenai
benda penghalang, maka pulsa ini akan dipantulkan kembali dan diterima kembali
oleh penerima ultrasonic. Dengan mengukur selang waktu antara saat pulsa dikirim
dan pulsa pantul diterima.
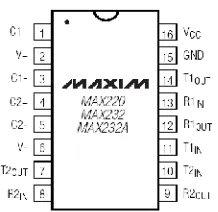
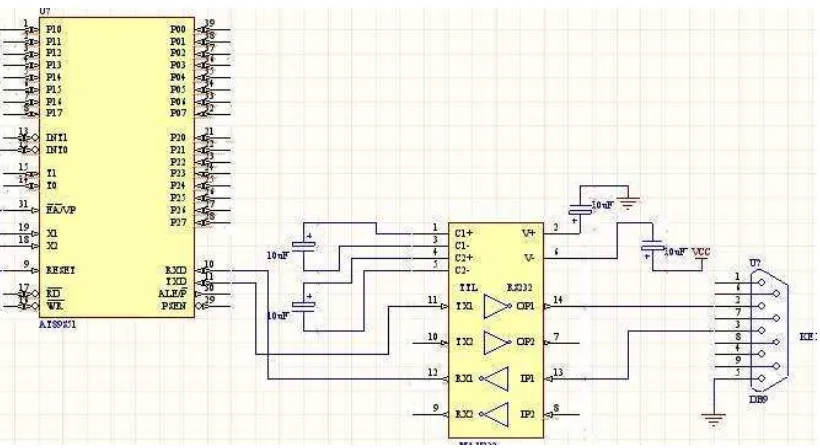
3.4.2 Rangkaian Port Serial Menggunakan IC MAX232
Max232 adalah sebuah IC (Integrated Circuit) yang berisikan 2 buah RS232
Line Driver dan 2 buah RS232 Line Receiver. RS232 adalah sebuah standar
komunikasi serial yang di dalamnya terdapat standarisasi penggunaan tegangan,
kecepatan transmisi dan impedansi untuk berkomunikasi. Dalam IC ini dilengkapi
pula dengan pengganda tegangan DC, sehingga meskipun catu daya untuk IC
MAX232 hanya +5 Volt, tapi sanggup melayani level tegangan RS232 antara –10
Volt sampai +10 Volt. Dalam IC DIP (Dual In-line Package)16 pin (8 pin x 2 baris)
ini terdapat 2 buah transmiter dan 2 receiver. Sering juga sebagai buffer serial
digunakan chip DS275. Bentuk dan keterangan kaki pada MAX232 dapat dilihat pada
Gambar 12
Gambar 3.4Bentuk dan Keterangan Kaki MAX232
Port serial digunakan sebagai komunikasi antara rangkaian elektronik
mikrokontroler sebagai pengendali sensor atau pompa dengan komputer sebagai pusat
pengendali. Komponen yang digunakan adalah kapasitor, max232 dan port serial.
Gambar 3.5Skematik Rangkaian Port Serial
3.4.3 Rangkaian Pompa
Rangkaian pompa ini digunakan untuk mengendalikan operasional pompa.
Komponen yang digunakan adalah transistor, resistor, dioda dan relay. Berikut adalah
gambar skematik rangkaian pompa :
3.5 Rangkaian Dasar Mikrokontroler Atmel AT89S51
Rangkaian dasar adalah rangkaian pendukung mikrokontroler sehingga
mampu menjalankan fungsinya. Komponen yang digunakannnya adalah resistor,
kapasitor dan crystal. Berikut adalah gambar rangkaian dasar mikrokontroler :
Gambar 3.7Skematik Rangkaian Dasar Mikrokontroler
Dari beberapa rangkaian-rangakain tersebut digabungkan menjadi satu hingga
dapat bekerja sesuai dengan fungsi yang akan dirancang yaitu pengendali ketinggian
3.6 Flowchart
Perikasa data jam, tanggal, nomor handphone dan perintah
Kirim Kode O Perintah ke Mikrokontroler
Kirim Kode K Perintah Kuras ke Mikrokontroler
Kirim Kode I Perintah Isi ke Mikrokontroler
Kirim Kode O Perintah ke Mikrokontroler
Kirim Kode K Perintah Kuras ke Mikrokontroler
Gambar 3.10HardwarePengendali Ketinggian Air
Gambar diatas merupakan rangakaian komponen Prototipe pengendali level
air bak penampung menggunakan SMS dan sebuah sistem yang mampu mengontrol
tinggi atau rendah nya permukaan air dalam bak penampung dengan cara
BAB IV
PENGUJIAN DAN ANALISA
4.1 Deskripsi Prototipe Pengendali Level Air
Prototipe pengendali level air bak penampung menggunakan SMS adalah
sebuah sistem yang mampu mengontrol tinggi atau rendah nya permukaan air dalam bak penampung dengan cara mengendalikan pompa pengisi air dan pompa
pengeluaran air. Jika permukaan air telah mencapai level yang telah ditentukan oleh operator maka pompa pengisi akan berhenti berkerja, jika permukaan air telah mencapai batas bawah maka pompa akan dihidupkan kembali oleh operator untuk
melakukan pengisian dan jika diperlukan untuk menguras bak penampung atau untuk keperluan tertentu maka pompa akan diberhentikan atau dijalankan.
Pengendalian pompa pengisi dan penguras air ini dapat dilakukan jauh dari
plant atau tempat bak penampung tersebut berada, yaitu dengan melalui SMS dari handphone. SMS dari Modem GSM dikirim ke PC yang sudah ter-install aplikasi
pengendali level air, data SMS tersebut diolah oleh PC tersebut menjadi sebuah intruksi yang selanjutnya dikirim ke rangkaian mikrokontroler dan mikrokontroler akan mengerjakan sesuatu sesuai dengan intruksi tersebut. Dalam pengerjaan tugas
Gambar 4.1Mekanisme Kerja Sistem Pengendali Level Air Menggunakan SMS Keterangan :
A : Rangkaian mikrokontroler memberikan sinyal agar pompa dapat hidup atau mati. B : Jika air telah mencapai batas bawah maka sensor akan memberikan sinyal
kerangkaian mikrokontroler.
C : Rangkaian mikrokontroler memberikan sinyal agar pompa dapat hidup atau mati sesuai dengan hasil pengolahan sinyal dari sensor yang masuk ke
mikrokontroler.
D : Jika air telah mencapai batas atas atau ketinggian yang telah ditentukan maka sensor akan memberikan sinyal kerangkaian mikrokontroler.
E : Komunikasi monitoring dan pengendalian antara rangkaian mikrokontroler dengan komputer menggunakan serial port.
F : Modem GSM sebagai penerima intruksi melalui SMS untuk pengendalian, komputer akan mengolah intruksi dalam SMS tersebut. Komunikasi antaran handphone dan komputer dapat menggunakan kabel data handphone yang
disediakan.
1.2 Pengujian Perangkat Keras ( Hardware) dan Lunak ( Software )
Pengujian perangkat keras dan lunak sangat penting dilakukan karena melalui pengujian ini rangkaian-rangkaian elektronika dan program yang dirancang dapat
diuji agar dapat menghindari kesalahan-kesalahan yang akan menjadi masalah dalam pengontrolan sistem yang sudah direncanakan.
4.3 Hasil Pengujian Sensor Ultrasonik ( SRF04 )
Tabel 4.1Data Level Ketinggian Air Naik
Grafik 4.1 Level Ketinggian Air Naik
Dari hasil pengukuran diatas dapat disumpulkan bahwa semakin dekat jarak air dengan sensor ultrasonik maka dapat dihasilkan perbedaan jarak 1 cm dan 2 cm meter antara pengukuran mistar dan sensor. Dimana sensor diletakan diketinggian
maksimal yang diinginkan (30 cm) pada tangki penampung.
Tabel 4.2Data Level Ketinggian Air Turun
19 7 6
20 6 5
21 5 5
22 4 4
23 3 3
Grafik 4.2 Level Ketinggian Air Turun
Dari hasil pengukuran diatas dapat disumpulkan bahwa semakin jauh jarak air
dengan sensor ultrasonik maka dapat dihasilkan perbedaan jarak 1 cm dan 2 cm meter antara pengukuran mistar dan sensor. Dimana sensor diletakan diketinggian maksimal yang diinginkan (30 cm) pada tangki penampung.
4.3.1 Pengujian Ketinggian Air
Maksud dari pengujian ketinggian air adalah melakukan percobaan secara manual pada program delphi dan secara otomatis dengan mengirim SMS sesuai dengan format. Berikut beberapa tabel pengujian ketinggian air.
Tabel 4.3Percobaan Pada Saat Kuras Air
Tabel 4.4Percobaan pada saat Isi Air
NO Batas Bawah ( cm ) Batas Atas ( cm ) Sensor ( cm )
1 05 10 9
2 05 15 14
3 05 20 19
4 05 25 23
Tabel 4.5Percobaan pada saat Kuras Otomatis
NO Batas Bawah ( cm ) Batas Atas ( cm ) Sensor ( cm )
1 05 25 25
2 05 25 05
Dari hasil pengujian didapatkan nilai seperti tabel diatas. Hasil tersebut tidak
sesuai dengan apa yang diinginkan. Seharusnya jarak sensor sesuai dengan Batas Bawah dan Batas Atas. Hal tersebut dikarenakan sensor ini mengukur jarak dengan
Grafik 4.3Pada Saat Kuras air 20 cm
Grafik 4.4Pada Saat kuras air 15 cm
Grafik 4.6Pada Saat Kuras air 5 cm
Tabel 4.6hasil pengujian pada Batas Bawah Air
Batas bawah overshoot Rise time
20 21 cm 1160
15 16 cm 870
10 11 cm 586
05 06 cm 290
Grafik 4.8Pada Saat ISI air 15 cm
Grafik 4.9Pada Saat ISI air 20 cm
Tabel 4.7hasil pengujian pada Batas Atas Air Batas atas overshoot Rise time
10 9 cm 586
15 14 cm 870
20 19 cm 1160
25 23 cm 1450
Grafik 4.11Pada Saat KURAS OTOMATIS
4.3.2 Pengujian Ketinggian AIR Menggunakan SMS
Maksud dari pengujian air menggunakan SMS adalah dilakukan dengan cara mengirim SMS sesuai format perintah yang akan dikerjakan. Berikut ini gambar
Gambar 4.2Perintah SMS Dengan Format KURAS
Gambar diatas dapat dilihat pada tabel terdapat perintah KURAS untuk
melakukan perintah kuras secara otomatis dengan menggunakan SMS yang dikirim oleh User dari handphone. Dengan batas atas 25 cm dan 05 cm batas bawah dan hasil
pada monitor jarak sensor sesuai dengan batas bawah 05 cm.
Gambar diatas dapat dilihat pada tabel terdapat perintah ISI untuk melakukan
perintah ISI secara otomatis dengan menggunakan SMS yang dikirim oleh User dari handphone. Dengan batas atas 25 cm dan 05 cm batas bawah dan hasil pada monitor jarak sensor sesuai dengan batas atas yaitu 25 cm.
Gambar 4.4Perintah SMS Dengan Forrnat OTO Untuk KURAS
Gambar diatas dapat dilihat pada tabel terdapat perintah OTO untuk melakukan perintah OTO secara otomatis dengan menggunakan SMS yang dikirim oleh User dari handphone. Dengan batas atas 25 cm dan 05 cm batas bawah dan hasil
Gambar 4.5Perintah SMS Dengan Format OTO Untuk ISI
Gambar diatas dapat dilihat pada tabel terdapat perintah OTO untuk melakukan perintah OTO secara otomatis dengan menggunakan SMS yang dikirim oleh User dari handphone. Dengan batas atas 25 cm dan 05 cm batas bawah dan hasil
pada monitor jarak sensor sesuai dengan batas atas yaitu 25 cm.
Gambar diatas dapat dilihat pada tabel terdapat perintah JARAK untuk melakukan perintah mengetahui jarak sensor yang dikirim oleh user untuk
mengetahui jarak ketinggian sensor.
Gambar 4.7Tampilan Perintah KURAS Pada Layar Handphone
Gambar diatas dapat dilihat perintah KURAS yang dikirim dari handphone user untuk melakukan perintah KURAS dan diterima oleh Modem GSM melalaui
kabel serial yang terhubung ke PC(komputer) yang sudah ter-install aplikasi pengendali ketinggian air, data SMS tersebut diolah oleh PC menjadi sebuah
Gambar 4.8Tampilan Perintah ISI Pada Layar Handphone
Gambar diatas dapat dilihat perintah ISI yang dikirim dari handphone user untuk melakukan perintah ISI dan diterima oleh Modem GSM melalaui kabel serial yang terhubung ke PC(komputer) yang sudah ter-install aplikasi pengendali ketinggian air, data SMS tersebut diolah oleh PC menjadi sebuah instruksi
Gambar diatas dapat dilihat perintah OTO yang dikirim dari handphone user
untuk melakukan perintah OTO dan diterima oleh Modem GSM melalaui kabel serial yang terhubung ke PC(komputer) yang sudah ter-install aplikasi pengendali
ketinggian air, data SMS tersebut diolah oleh PC menjadi sebuah instruksi
Gambar 4.10Tampilan Perintah JARAK Pada Layar Handphone
Gambar diatas dapat dilihat perintah JARAK yang dikirim dari handphone user untuk mengatahui JARAK sensor dan diterima oleh Modem GSM melalaui
kabel serial yang terhubung ke PC(komputer) yang sudah ter-install aplikasi pengendali ketinggian air, data SMS tersebut diolah oleh PC dan dikirim balik ke user
BAB V
KESIMPULAN DAN SARAN
Setelah dilakukan pengujain alat dan perangkat lunak (software), maka
diperoleh beberapa kesimpulan dan saran yang diharapkan akan bermanfaat bagi
pengembangan ilmu dan tegnologi serta bagi kelanjutan pengembangan dan
penyempurnaan proyek tugas akhir ini.
5.1 Kesimpulan
Berdasarkan analisa dari perancangan perangkat keras (hardware) dan
perangkat lunak (software), maka dapat diambil beberapa kesimpulan.
Ketika melakukan pengujian pada perancangan dapat diketahui beberapa
kesimpulan, yaitu:
1. Program pengontrol Delphi digunakan untuk mengatur level ketinggian air
pada tangki proses sehingga mencapai level ketinggian yang diinginkan.
Program pengontrolan ini juga dipakai untuk mengatur batas atas dan bawah
sehingga ketinggian belum mencapai batas atas dan bawah maka pompa akan
berhenti sedangkan sensor mengalami overshoot (nilai rata-rata 1 cm) dalam
membaca ketinggian jarak air. Waktu yang diperlukan untuk mencapai batas
2. Rangkain sensor dapat bekerja dengan cara menghitung selisih waktu antara
saat pemancaran sinyal dan saat penerimaan sinyal pantul. Seperti diketahui,
kecepatan rambat suara diudara adalah 34399,22 cm/detik, bararti untuk
merambat sejauh 1 cm suara membutuhkan waktu 29 mikro detik. Misalkan
waktu antara pengiriman dan penerimaan sinyal ultrasonic adalah 5800 micro
detik, maka jarak antara sensor dan benda ( penghalang ) adalah 100 cm. (2 x
100 cm x 29 mikro detik/cm = 5800 mikro detik.
3. Program Delphi untuk monitoring dan pengendalian ketinggian air pada
penampung bekerja dengan baik.
4. Untuk pengendalian jarak jauh menggunakan SMS bekerja dengan baik dan
sesuai dengan format yang sudah ditentukan.
5. Pada saat pengurasan dan pengisiian air pompa bekerja dengan baik sesuai
dengan perintah dan sesuai dengan batas atas dan bawah yang sudah
ditentukan.
6. Rangkaian mikrokontroler dapat berkomunikasi secara serial maupun pararel
dengan komputer
7. Aktifitas monitoring dan kontroling level air dapat disimpan ke dalam basis
data, sehingga dapat mengetahui kesalahan yang mungkin dapat terjadi
sebagai sarana perbaikan.
8. Port pararel DB9 digunakan sebagai media untuk mengeluarkan data,
mengambil data dan mengontrol rangkaian, dan juga hasil pengujian dapat
diambil kesimpulan port pararel dapat bekerja dengan baik sebagai
5.2 Saran
Berikut merupakan saran yang diharapkan dapat memberikan perubahan
terhadap pengendalian level air bak penampung menggunakan SMS :
1. Intruksi dalam prototipe pengendali level air dapat menggunakan suara tanpa
harus menekan tombol.
2. Bak penampung yang dikendalikan dapat ditambahkan menjadi lebih dari satu.
3. Pengontrolan dalam tugas akhir ini masih menggunakan kabel data DB9. Untuk
itu bagi peneliti selanjutnya diharapkan dapat menggunakan kabel USB atau
DAFTAR PUSTAKA
1. http://www.robot-elektronics.co.uk
2. http://srf04tech.htm
3. http://atmel.com
4. http://www.ti.com
DAFTAR RIWAYAT HIDUP
I. IDENTITAS DIRI
Nama Lengkap : MULKY SOPRIMA
Nim : 13104013
Tampat, Tanggal Lahir : Jakarta, 04 July 1986
Agama : Islam
Jenis Kelamin : Laki-laki
Status : Mahasiswa
Alamat Asal : T.W.A Komp Depnaker Blok L21
No : 17 RT :06 RW: 34 kecamatan
Teluk Pucung
Bekasi Utara
No. Handphone : 085692332235
II. PENDIDIKAN FORMAL
1992 - 1998 : SDN Harapan Baru
1998 – 2001 : SLTPN 1 Babelan
2001 – 2004 : SMKN Taruna Bangsa