LEMBAR PENGESAHAN TUGAS AKHIR
PERENCANAAN SISTEM PENGONTROLAN PENGUKURAN BERAT TIMBANGAN KENDARAAN SECARA AUTOMATIS
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan Pendidikan Sarjana ( S1 ) Ekstensi Departemen Teknik Elektro Fakultas Teknik
Universitas Sumatera Utara Disusun oleh :
JULKARNINE MARPAUNG NIM : 100422066
Sidang pada tanggal 16 Juli 2014 didepan penguji : 1. Ketua Penguji : Ir.Surya Tarmizi Kasim,M.Si ………... 2. Anggota Penguji : Ir.Syamsul Amien,M.Si ...
DISETUJUI OLEH : PEMBIMBING TUGAS AKHIR
Ir.Eddy Warman.MT Nip: 195412201980031001
DIKETAHUI OLEH :
KETUA DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK USU
Ir.Surya Tarmizi Kasim,M.Si Nip : 19540431198601102 DEPARTEMEN TEKNIK ELEKTRO PROGRAM PENDIDIKAN SARJANA EKSTENSI
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
ABSTRAK
Dalam hal pengukuran massa, pengukuran massa biasanya dilakukan
secara manual yaitu dengan menggunakan timbangan manual. Defenisi timbangan
itu sendiri adalah sebuah alat bantu yang digunakan untuk mengetahui berat suatu
benda .dalam pemanfaatannya timbangan digunakan diberbagai bidang salah
satunya dibidang perindustria dan untuk jalan umum, untuk mengetahui berat
muatan kendaraan yang dibawa.
Berdasarkan dari penjelasan diatas, maka dirancanglah suatu alat
pengontrolan berat muatan kendaraan menggunakan mikrokontroler ATmega
8535 sebagai pengendali.alat ini dirancang untuk menimbang berat muatan
kendaraan secara Automatis.alat ini menggunakan satu buah sensor yaitu load
cell.sensor diletakkan ditengah agar alat dapat menimbang secara baik.pada saat
alat mendeteksi adanya beban, maka secara automatis sensor akan membaca dan
mengirimkan sinyal ke mikrokontroler yang kemudian berat muatan kendaraan
tersebut ditampilkan oleh LCD disertakan mengirim pesan lewat sms.
Dari hasil analisis data yang dilakukan mempunyai skala 1 : 1000 yang
artinya 1 kg tampilan di LCD sama dengan berat 1 ton yang sebenarnya. pesan
normal load akan terkirim apabila berat muatan kendaraan diantara 2000kg 5000kg dan apabila berat muatan kendaraan melebihi dari 5000kg maka pesan
over load akan terkirim.
Kata kunci :Mikrokontroler AT 89S51, LCD, Load cell.AVR 8535.
KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa atas
berkat dan karunia-Nya, sehingga penulis dapat menyelesaikan Tugas Akhir ini
dengan judul "Perancangan Sistem Pengontrolan Pengukuran Berat Pada
Timbangan kendaraan Secara Automatis. Adapun Tugas Akhir ini dibuat untuk
memenuhi syarat memperoleh gelar Sarjana Teknik pada Fakultas Teknik
Universitas Sumatera Utara.
Dalam pengerjaan Tugas Akhir ini, penulis tidak bekerja sendirian dan tidak
terlepas dari bantuan berbagai pihak, oleh karena itu penulis berkenan
menyampaikan terimaksih kepada :
1. Orangtua saya tercinta, R.Marpaung dan K.Sinaga yang telah memberikan
kasih sayang penuh serta memberikan dukungan moril, doa dan materil
yang tiada terkira dan tiada mungkin terbalaskan.
2. Bapak Ir.Eddy Warman.MT selaku Dosen Pembimbing.
3. Bapak Ir. Surya Tarmizi Kasim,M.Si selaku Ketua Departemen Teknik
Elektro, Fakultas Teknik USU.
4. Bapak Rahmad Fauzi, ST.,MT selaku Sekertaris Jurusan.
5. Bapak Surya Tarmizi Kasim,M.Si sebagai Ketua Penguji Sidang
6. Ir.Syamsul Amien, M.Si sebagai Penguji Sidang
5. Teman-teman satu angkatan yang tidak dapat penulis sebutkan satu per satu.
6. Seluruh staff pengajar dan Civitas Akademika Departemen Teknik Elektro,
Fakultas Teknik USU dan semua pihak yang banyak membantu.
Berbagai usaha telah penulis lakukan demi terselesaikannya Tugas Akhir ini
sempurna. Oleh karena itu saran dan kritik dari pembaca sangat diharapkan untuk
menyempurnakan dan mengembangkan kajian dalam bidang ini.
Akhir kata, penulis berharap semoga penulisan Tugas Akhir ini dapat
bermanfaat.
Medan, Juli 2014
Penulis,
JULKARNINE MARPAUNG
DAFTAR ISI
LEMBAR PENGESAHAN i
ABSTRAK ii
KATA PENGANTAR iii
DAFTAR ISI v
DAFTAR GAMBAR ix
DAFTAR TABEL x
BAB I PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Tujuan dan manfaat Penulisan 2
1.3 Batasan Masalah 3
1.4 Metode Penulisan 3
1.5 Sistematika penulisan 4
BAB II DASAR TEORI 5
2.1 Mikrokontroler AT 89S51 5
2.1.2 Struktur Mikrokontroler AT 89S51 9
2.1.3 Cara kerja Mikrokontroler AT 89S51 12
2.2 Motor DC ( STEPPER ) 12
2.2.1 Permanent Magnet Motor Stepper 14
2.2.2 Efek Pembebanan Pada Motor Stepper 14
2.2.3 Motor Stepper Type Variable Reluctance (VR) 17
2.2.4 Motor Stepper Type Permanent Magnet (PM) 18
2.2.5 Motor Stepper Tipe Hybrid (HB) 18
2.3 Sensor Load cell 19
2.4 Rangkaian inverting Op – amp 20
2.4.1 Operasi penguat Diferensial 21
2.5 Mikrokontroler AVR 8535 23
2.5.1 Konstruksi Mikrokontroler ATmega 8535 25
2.5.2 Pin – pin pada Mikrokontroler ATmega 8535 27
BAB III PERANCANGAN SISTEM 28
3.1 Blok diagram rangkaian 28
3.2.1 Sensor RFID 30
3.2.2 Sensor Load cell 30
3.2.3 Pengendali mikrokontroler 31
3.2.4 Driver 32
3.2.5 Plant 33
3.2.6 Display LCD 16 x 2 33
3.2.7 SMS 35
3.3 Perancangan Software 36
3.3.1 Perancangan Flow chart 36
3.3.2 Perancangan program 38
3.4 Prinsip Kerja sistem 47
BAB IV PENGUJIAN DAN ANALISA ALAT 48
4.1 Pengujian RFID 48
4.1.1 Rangkaian RFID 48
4.2 Pengujian rangkaian driver load cell dan OP – AMP 49 4.2.1 Rangkaian pengujian Load cell dan OP – AMP 50
4.2.3 Analisa Data 51
4.2.4 Grafik Berat Tampilan Output Terhadap Berat Sesungguhnya 53
4.3 Pengujian rangkaian driver motor DC atau penguat arus 53
4.3.1 Rangkaian Driver Motor Stepper atau Penguat Arus 54
4.3.2 Data Pengujian Rangkaian Driver Motor DC atau Penguat Arus 54
4.3.3 Analisa data 54
4.4 Pengujian Pin ATmega 8535 55
4.4.1 Rangkaian Pengujian Pin AT MEGA 8535 56
4.4.2 Data Hasil Pengujian Pin AT MEGA 8535 56
BAB V PENUTUP 58
5.1 Kesimpulan 58
5.2 Saran 58
DAFTAR PUSTAKA 59
DAFTAR GAMBAR
2.1 Konfigurasi Pin AT 89S51 6
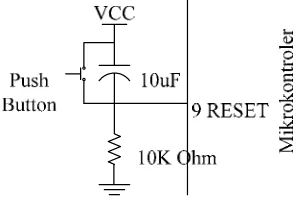
2.2 Konfigurasi reset 6
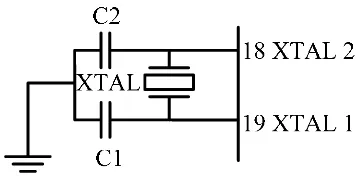
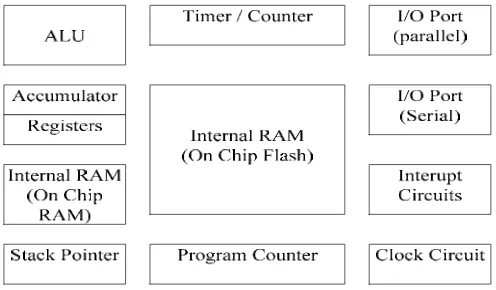
2.3 Konfigurasi Kristal untuk osilator 8 2.4 Blok diagram mikrokontroler AT 89S51 9 2.5 Arsitektur mikrokontroler AT 89S51 10
2.6 Motor stepper 13
2.7 Perubahan gaya dan torsi saat Rotor menuju stator 15
2.8 Rotor tertunda satu step 16
2.9 Penampang Melintang dari Motor DC Tipe Variable Reluctance 18
2.10 Bentuk fisik sensor Load cell 19
2.11 IC LM 324 22
2.12 Pin diagram LM324 22
2.13 Konfigurasi pin ATmega 8535 (data sheet AVR ) 27
3.1 Diagram blok sistem 28
3.2 Rangkaian Driver motor stepper. 33
3.3 Pin out LCD M1362 hitachi 34
3.4 Flow chart 37
3.5 Rangkaian Proximity Reader 48
DAFTAR TABEL
Tabel 1.1 Pemberian Tegangan untuk Model Full step 16 Tabel 1.2 Pemberian Tegangan untuk Model half step 17
Tabel 1.3 Fungsi setiap pin 23
Tabel 1.4 Fungsi khusus port B 28
Tabel 1.5 Fungsi khusu Port C 28
Tabel 1.6 Fungsi khusu Port D 29
Tabel 1.7 Pin out LCD M1362 34
Tabel 1.8 Data Hasil Pengujian Rangkaian Proximity Reader 49
Tabel 1.9 Data Hasil Pengujian Sensor Load Cell dan Penguat Operasi 50
Tabel 2.1 Hasil Analisa Data Penguat Operasi Tegangan 51
Tabel 2.2 Data Percobaan Perhitungan Deviasi 52
Tabel 2.3 Data Pengujian Rangkaian Driver Motor DC 54
Tabel 2.4 Data resistansi tahanan dalam Motor DC 55
Tabel 2.5 Data Hasil Pengujian Pin AT MEGA 8535 56
ABSTRAK
Dalam hal pengukuran massa, pengukuran massa biasanya dilakukan
secara manual yaitu dengan menggunakan timbangan manual. Defenisi timbangan
itu sendiri adalah sebuah alat bantu yang digunakan untuk mengetahui berat suatu
benda .dalam pemanfaatannya timbangan digunakan diberbagai bidang salah
satunya dibidang perindustria dan untuk jalan umum, untuk mengetahui berat
muatan kendaraan yang dibawa.
Berdasarkan dari penjelasan diatas, maka dirancanglah suatu alat
pengontrolan berat muatan kendaraan menggunakan mikrokontroler ATmega
8535 sebagai pengendali.alat ini dirancang untuk menimbang berat muatan
kendaraan secara Automatis.alat ini menggunakan satu buah sensor yaitu load
cell.sensor diletakkan ditengah agar alat dapat menimbang secara baik.pada saat
alat mendeteksi adanya beban, maka secara automatis sensor akan membaca dan
mengirimkan sinyal ke mikrokontroler yang kemudian berat muatan kendaraan
tersebut ditampilkan oleh LCD disertakan mengirim pesan lewat sms.
Dari hasil analisis data yang dilakukan mempunyai skala 1 : 1000 yang
artinya 1 kg tampilan di LCD sama dengan berat 1 ton yang sebenarnya. pesan
normal load akan terkirim apabila berat muatan kendaraan diantara 2000kg 5000kg dan apabila berat muatan kendaraan melebihi dari 5000kg maka pesan
over load akan terkirim.
Kata kunci :Mikrokontroler AT 89S51, LCD, Load cell.AVR 8535.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Salah satu tugas mahasiswa semester akhir program studi Teknik Konversi
Energi Universitas Sumatera Utara yaitu menyusun Laporan Tugas akhir, dalam
kesempatan ini, penulis memilih untuk membuat Tugas akhir berbentuk
perancangan dan pembuatan proyek, sehingga pada akhirnya nanti penulis
mengharapkan kedaan proyek ini berfungsi sesuai dengan spesifikasi perancangan
dan dapat memberikan manfaat bagi penulis dan pihak yang membahas proyek
ini.
Seiring dengan perkembangan Ilmu dan Teknologi dibidang Elektro yang
begitu cepat dan telah membawa manusia ke era globalisasi, maka perlu
ditemukan teknologi yang sesuai kebutuhan dan memiliki efesiensi serta
efektifitas yang baik. atas dasar pemikiran tersebut penulis merasa bahwa aplikasi
Ilmu Elektro telah dapat menggantikan sistem kontrol yang konvensional dengan
teknologi ini, penulis mencoba mengembangkan teknologi dalam pembuatan alat
untuk mempermudah pekerjaan manusia, maka penulis merencanakan dan
membuat Tugas akhir yang berjudul :" Perencanaan sistem pengontrolan
pengukuran berat timbangan kendaraan secara Automatis ". atas dasar judul di
atas maka penulis merasa bahwa aplikasi Ilmu elektro dapat memberikan
gambaran nyata tentang automatisasi yang berhubungan dengan efesiensi waktu
industri kecil dan besar, baik sebagai proteksi dan efesiensi kerja.untuk lebih
detailnya bisa kita lihat aplikasinya pada Industri Kelapa sawit.
1.2 Tujuan dan Manfaat Penulisan
a) Tujuan Pembuatan proyek ini adalah untuk menganalisa dan
merancang sistem pengontrolan pemakaian Mikrokontroler AT
89S51 yang berkaitan dengan pengaplikasian Ilmu yang diperoleh
selama perkuliahan kedalam industri dan kehidupan sehari – hari.
b) Selain itu, secara khusus tujuan proyek ini adalah untuk membuat
suatu sistem yang dapat mengontrol pengukuran berat pada
kendaraan secara automatis dengan memakai sensor berat (Load
cell ) serta dikontrol oleh mikrokontroler AT 89S51 dan AVR
8535.
c) Kendaraan tidak merusak jalan dan tidak mengurangi umur
kendaraan.
d) Manfaat yang diambil dari perancangan dan pembuatan sistem
kontrol berat pada muatan kendaraan dengan pengiriman informasi
lewat sms ini adalah menambah wawasan dan Ilmu pengetahuan di
bidang Elektro khususnya pada pengontrolan.
1.3 Batasan Masalah
Untuk mendapatkan pembahasan yang semaksimal mungkin pada
pembuatan proyek skripsi ini, perlu kiranya penulis membatasi permasalahan
yang akan dibahas.
a) Penulis membahas bagaimana cara pengontrolan dengan
setiap blok diagram sistem dan menguraikan secara umum fungsi
dari setiap konponen utama.
b) Perancangan dari produk ini banyak menggunakan
komponen-komponen khusus yang perlu dijelaskan agar dapat memahami cara
kerja dari rangkaian Mikrokontroler AT89S51 dan ATmega AVR
8535 dengan mudah dan juga sensor load cell.
c) Selain perangkat keras, perangkat lunak (program) yang digunakan
untuk mengaktifkan perancangan ini menggunakan bahasa
pemograman dengan Mikrokontroler AT89S51 yaitu memakai
bahasa C.
1.4 Metode Penulisan
Metode yang digunakan dalam penulisan dalam tugas akhir ini adalah :
1. Studi literature
Yaitu dengan mempelajari buku referensi, jurnal, artikel dari internet, dan
bahkan kuliah yang mendukung dan berkaitan dengan tugas akhir ini.
2. Metode diskusi
Yaitu berupa tanya jawab dengan dosen pembimbing dan teman-teman
mahasiswa mengenai masalah-masalah yang timbul selama penulisan
tugas akhir ini berlangsung.
3. Studi lapangan
1.5 Sistematika penulisan
Dalam penulisan laporan tugas akhir ini dibagi dalam beberapa bab, yang
masing-masing bab akan membahas hal-hal tertentu. Adapun sistematika
penulisan Laporan Tugas Akhir ini adalah:
BAB I PENDAHULUAN
Pada bab ini uraian tentang latar belakang pemilihan judul, batasan
masalah, tujuan pembuatan proyek dan pembuatan laporan, batasan
masalah, metode pengumpulan data, dan system sistematika penulisan
laporan.
BAB II DASAR TEORI
Pada bab ini berisikan teori –teori yang digunakan sebagai landasan
pembuatan rancangan dan penulisan laporan tugas akhir ini.
BAB III PERANCANGAN DAN PEMBUATAN SISTEM
Pada bab ini membahas diagram blok sistem rangkaian dan penjelasan
mengenai fungsi masing-masing blok
BAB IV PENGUJIAN DAN PEMBUATAN SISTEM
Pada bab ini membahas tentang pengujian rangkaian tiap blok dan
pengujian sistem secara keseluruhan.
BAB V PENUTUP
BAB II
DASAR TEORI
2.1 MIKROKONTROLER AT 89S51 [1]
Mikrokontroler adalah suatu unit yang dapat diprogram cara kerjanya,
sehingga dapat dipergunakan untuk keperluan yang berbeda. Pada masa sekarang
mikrokontroller banyak digunakan sebagai pengontrol pada peralatan – peralatan
mulai dari mainan/hobie peralatan rumah tangga, sampai kontrol pada peralatan
industri.
Beberapa mikrikontroler yang beredar di pasaran merupakan keluarga
beberapa pabrik yang sudah terkenal, misal:
a. Intel.contoh : 8031,89C51 dll
b. Zilog,contoh : Z8,Z8F1680 dll
c. Microchip, contoh : PIC6F84, PIC6F877 dll
d. Motorola, contoh :68HC11,MC68HC705V12CFN dll
e. Philips Semiconductors,contoh:LPC2000,LPC900,LPC700
dll
f. Atmel contoh: AT 89S52 series ( ARM THUMB
architecture) AT90, Tiny&Mega series, AVR (Atmel
Norway design), Atmel AT89 series( Intel 8051/MCS
architecture).
Dalam pembahasan modul ini akan di jelaskan penggunaan mikrokontroler dari
Atmel AT89S series, dengan alasan lebih mudah dalam pemogramannya,
pengembangannya dan harganya yang murah serta telah banyak beredar di
2.1.1 Konfigurasi Pin Mikrokontroler AT 89S51
Gambar 2.1 Konfigurasi Pin AT 89S51
• Pin 1 sampai 8 (Port 1.0 s/d Port 1.7)
Ini adalah port 1 yang merupakan saluran/bus I/O 8 bit dua arah. Dengan
internal pull-up yang dapat digunakan untuk berbagai keperluan.Pada port ini juga
digunakan sebagai saluran alamat pada saat pemograman dan verifikasi.
• Pin 9
Merupakan masukan reset (aktif tinggi), pulsa transisi dari rendah ke
tinggi akan me-reset mikrokontroler ini.
• Pin 10 sampai 17 (Port 3.0 s/d Port 3.7)
Ini adalah port 3 merupakan saluran/bus I/O 8 bit dua arah dengan internal
pull-ups yang memiliki fungsi pengganti. Bila fungsi pengganti tidak dipakai,
maka ini dapat digunakan sebagai port paralel 8 bit serbaguna. Selain itu sebagian
dari port 3 dapat berfungsi sebagai sinyal.8 kontrol pada saat proses pemograman
dan verifikasi.
Bit Fungsi Alternatif
P3.0 sebagai RXD alamat B0H; Untuk menerima data port serial
P3.1 sebagai TXD alamat B1H; Untuk mengirim data port serial
P3.2 sebagai INT0 alamat B2H; Interupsi eksternal 0
P3.3 sebagai INT1 alamat B3H; Interupsi eksternal 1
P3.4 sebagai T0 alamat B4H; Input Eksternal waktu/pencacah 0
P3.5 sebagai T1 alamat B5H; Input Eksternal waktu/pencacah 1
P3.6 sebagai WR alamat B6H; Jalur menulis memori data eksternal
P3.7 sebagai RD alamat B7H; Jalur membaca memori data eksternal
• Pin 18 dan 19
Ini merupakan masukan ke penguat osilator berpenguat tinggi. Pada
mikrokontroler ini memiliki seluruh rangkaian osilator yang diperlukan pada
serpih yang sama (on chip) kecuali rangkaian kristal yang mengendalikan
frekuensi osilator. Karenanya 18 dan 19 sangat diperlukan untuk dihubungkan
dengan kristal. Selain itu XTAL 1 dapat juga sebagai input untuk inverting
oscilator amplifier dan input ke rangkaian internal clock sedangkan XTAL 2
Gambar 2.3 konfigurasi Kristal untuk osilator
• Pin 20
Merupakan ground sumber tegangan yang diberi simbol GND.
• Pin 21 sampai 28 (Port 2.0 s/d Port 2.7)
Ini adalah port 2 yang merupakan saluran/bus I/O 8 bit dua arah dengan
internal pull-ups. Saat pengambilan data dari program memori eksternal atau
selama mengakses data memori eksternal yang menggunakan alamat 16 bit
(MOVX @ DPTR), port 2 berfungsi sebagai saluran/bus alamat tinggi (A8 –
A15). Sedangkan pada saat mengakses ke data.9 memori eksternal yang
menggunakan alamat 8 bit (MOVX @ R1), port 2 mengeluarkan isi dari P2 pada
Special Function Register.
• Pin 29
Program Store Enable (PSEN) merupakan sinyal pengontrol untuk
mengakses program memori eksternal masuk ke dalam bus selama proses
pemberian/pengambilan instruksi (fetching).
• Pin 30
Address Latch Enable (ALE)/PROG merupakan penahan alamat memori
eksternal (pada port 1) selama mengakses ke memori eksternal. Pena ini juga
• Pin 31
External Access Enable (EA) merupakan sinyal kontrol untuk pembacaan
memori program. Apabila diset rendah (L) maka mikrokontroller akan
melaksanakan seluruh instruksi dari memori program eksternal sedangkan apabila
diset tinggi (H)
maka mikrokontroler akan melaksanakan instruksi dari memori program internal
ketika isi program.11 counter kurang dari 4096. ini juga berfungsi sebagai
tegangan pemograman (VPP = +12V) selama proses pemograman.
• Pin 32 sampai 39 (Port 0.0 s/d Port 0.7)
Ini adalah port 0 yang merupakan saluran/bus I/O 8 bit open colector,
dapat juga digunakan sebagai multipleks bus alamat rendah dan bus data selama
adanya akses ke memori program eksternal. Pada saat proses pemograman dan
verifikasi port 0 digunakan sebagai saluran/bus data. External pull-ups diperlukan
selama proses verifikasi.
• Pin 40
Merupakan positif sumber tegangan yang diberi simbol Vcc.
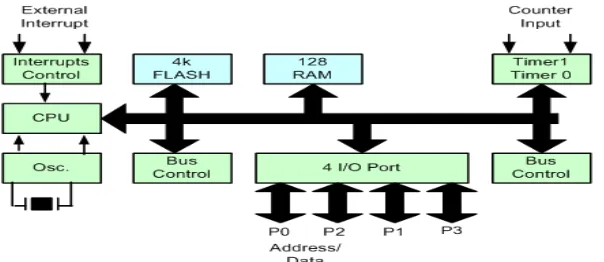
2.1.2 Struktur Mikrokontroler AT 89S51
Blok diagram umum mikrokontroler adalah sebagai berikut :
Masing – masing bagian tersebut saling dihubungkan melalui internal BUS,
umumnya terdiri dari 3 jenis bus, yaitu :addres bus, data bus, dan control bus.
Diagram Arsitektur AT 89S51
Gambar 2.5. Arsitektur mikrokontroler AT 89S51
Fungsi setiap bagian:
a Register adalah suatu tempat penyimpanan (Variabel) bilangan bulat 8 bit atau
16 bit. Pada umumnya register berjumlah banyak, dan masing-masing ada
yang memiliki fungsi khusus dan ada yang memiliki fungsi umum.
b Accumulor (register A), merupakan salah satu register khusus yang berfungsi
sebagai operand umum proses aritmatika dan logika.
c Program counter, merupakan salah satu register khusus yang berfungsi sebagai
pencacah/penghitung eksekusi program mikrokontroler
d ALU (Arithmetical and Logical Unit), ALU memiliki kemampuan khusus
dalam mengerjakan proses-proses arithmetika (penjumlahan, pengurangan,
perkalian dan pembagian) dan operasi logika (AND, OR, XOR dan NOT)
e Clock circuits, mikrokontroller merupakan rangkaian digital sekuensial,
dimana kerjanya berjalan melalui sinkronisasi clock. Karenanya diperlukan
f Internal ROM (On Chip Flash), merupakan memori yang isinya tidak dapat
diubah atau dihapus (pada saat mikrokontroler berjalan) isinya hanya dapat
dibaca saja. ROM biasanya berisi program (urutan-urutan instruksi) untuk
menjalankan mikrokontroler. Data pada ROM dibaca secara berurutan.
g Internal RAM, merupakan memori yang isinya 256 Kybite dapat diubah atau
dihapus. RAM pada mikrokontroler biasanya berisi data-data variable dan
register. Data yang tersimpan pada RAM bersifat hilang jika catu daya yang
diberikan hilang (mati).
h Stack pointer, merupakan bagian dari RAM yang memiliki metode
penyimpanan dan pengambilan data yang khusus. Dimana data yang paling
terakhir dimasukkan merupakan data yang pertama kali dibaca kembali
(LIFO).
i I/O port (serial dan parallel), merupakan sarana yang digunakan
mikrokontroller untuk mengakses peralatan di luar dirinya, memasukan dan
mengeluarkan data.
j Interrupt circuits, merupakan rangkaian yang mengendalikan sinyal-sinyal
interupsi bail internal maupun eksternal, dengan adanya sinyal interupsi akan
mengakibatkan program utama yang sedang dikerjakan berhenti sejenak, dan
bercabang/.loncat ke program rutin layanan interupsi (RLI) yang diminta,
setelah RLI selesai dikerjakan, mikrokontroller kembali melanjutkan program
utama yang tertunda tadi.
Setiap mikrokontroler memiliki blok diagram dan arsitektur yang berbeda satu
dalamnya, beberapa jenis mikrokontroler telah dilengkapi oleh ADC/DAC, PWM,
WDT dan lain-lain.
2.1.3 Cara kerja Mikrokontroler AT 89S51
Prinsip kerja mikrokontroler adalah sebagai berikut :
a) Berdasarkan nilai yang berada pada register Program Counter, mikrokontroler
mengambil data pada ROM dengan alamat sebagaimana yang tertera pada
register Program Counter. Selanjutnya isi dari register Program Counter
ditambah dengan satu (Increment) secara otomatis.
b) Instruksi yang diambil tersebut diolah dan dijalankan oleh mikrokontroler.
Proses pengerjaan bergantung pada jenis instruksi, bisa membaca, mengubah
nilai-nilai pada register, RAM, isi Port, atau melakukan pembacaan dan
dilanjutkan dengan pengubahan data.
c) Program Counter telah berubah nilainya (baik karena penambahan otomatis
pada langkah 1, atau karena pengubahan-pengubahan pada langkah 2).
Selanjutnya yang dilakukan oleh mikrokontroler adalah mengulang kembali
siklus ini pada langkah 1. Demikian seterusnya hingga power dimatikan.
2.2 MOTOR DC (STEPPER)
Motor stepper adalah motor DC yang khusus berputar dalam suatu derajat
yang tetap yang disebut step (langkah). Satu step antara 0,9 sampai 90° [2]. Motor
stepper terdiri dari rotor dan stator. Rotor adalah permanen maget sedangkan
stator adalah elektromagnet. Rotor akan bergerak jika stator diberi aliran listrik.
Aliran listrik ini membangkitkan medan magnet dan membuat rotor
menyesuaikan dengan kutub magnet yang dimilikinya. Motor stepper digunakan
posisi. Hal ini dapat dilakukan dengan cara menghitung jumlah step yang harus
diberikan dari posisi acuan. Ukuran dari step ditentukan oleh jumlah rotor dan
kutub stator. Tidak ada kesalahan kumulatif yaitu kesalahan sudut tidak terus
bertambahan dengan meningkatnya step.
Gambar 2.6. motor stepper
Motor stepper bekerja secara lup terbuka, yaitu pengatur mengirimkan sejumlah
step ke motor untuk menggerakkan rotor ke posisi yang diinginkan. Sebagai
contoh motor stepper pada floppy disk drive. Motor stepper memiliki kecepatan
yang rendah dan sering digunakan tanpa reduksi gigi gerigi (gear reduction).
Suatu jenis motor stepper dengan 500 pulsa/detik akan berputar150 rpm [2].
Tetapi motor stepper dapat dibuat berputar 1 rpm atau kurang dengan akurasi
yang tinggi. Terdapat tiga jenis motor stepper yaitu magnet permanen, variable
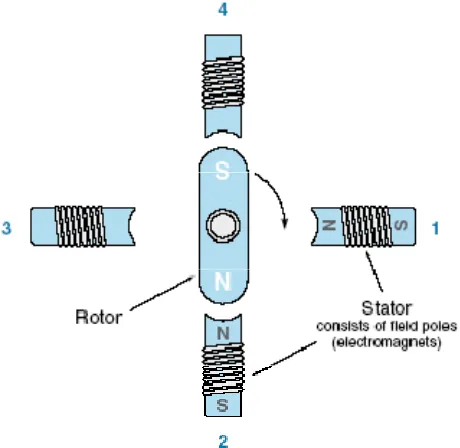
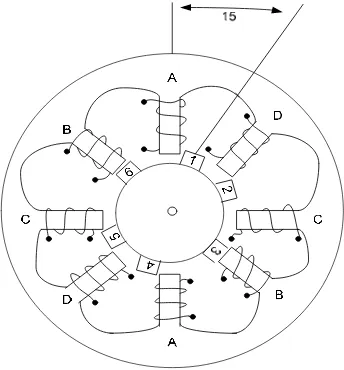
2.2.1 Permanent Magnet Motor Stepper
Permanent Magnet (PM) Stepper Motor menggunakan magnet permanen
sebagai rotornya. Pada gambar 2.6 adalah jenis PM Motor Stepper dengan 4
medan (stator). Jika kumparan medan 1 diberi energi listrik maka kutub selatan
rotor akan tertarik menuju kumparan ini. Jika kumparan 1 tidak diberi energi dan
kumparan 2 diberi energi maka rotor akan berputar dan menuju kumparan 2. Jadi
rotor memiliki step 90° untuk setiap kali pemberian energi ini.
Salah satu sifat motor stepper yang diinginkan adalah rotor akan mengarah kepada
kutub yang terdekat meski tidak dialiri listrik. Anda akan merasakan hentakan
magnet ini jika memutar motor stepper dengan tangan. Gejala ini disebut detent
torque atau residual torque (torsi sisa). Torsi residu ini sangat diperlukan karena
membuat motor berhenti pada step terakhir yang diperintahkan.
2.2.2 Efek Pembebanan Pada Motor Stepper
Dalam pengerjaan lup terbuka seharusnya motor stepper harus bergerak
satu step setiap kali diperintah tetapi jika bebanya terlalu berlebihan motor stepper
memiliki torsi untuk membuat satu step. Mungkin rotor akan berputar sedikit
kemudian kembali ke posisi semula tanpa mencapai satu step. Ini yang disebut
dengan stalled. Jika pengatur tidak memiliki umpan balik maka pengatur tidak
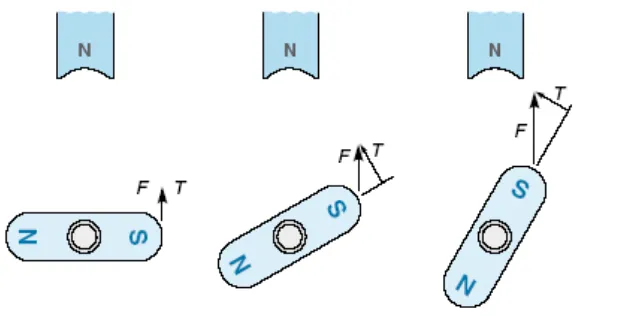
akan pernah tahu kalau tidak tercapai sebuah step. Pada saat rotor tepat pada
kutub stator torsinya adalah nol, torsi hanya terjadi pada saat rotor tepat pada
kutub stator. Kejadian ini digambarkan pada gambar 2.7 Saat stator dialiri listrik
terjadi gaya pada kutub utara rotor untuk bergerak menuju kutub selatan stator.
rotor tepat di depan stator (gambar terakhir di Gambar 2.7) terjadi gaya tarik yang
paling besar tetapi torsinya tidak ada. Pada prakteknya rotor akan berhenti
sebelum tepat di depan stator saat torsi step yang melemah ini sama dengan torsi
beban.
Gambar 2.7 Perubahan gaya dan torsi saat Rotor menuju stator
Misal rotor diinginkan berputar berlawanan arah jarum jam. Jika rotor tertinggal
satu step (langkah) dari stator yaitu pada saat rotor baru mau bergerak kumparan
kedua sudah dialiri (Gambar 2.8). Hal ini menyebabkan rotor bisa berputar
berlawanan arah jarum jam tetapi bisa juga searah jarum jam dalam mengejar
kutub utara stator. Karena itu dibatasi agar rotor tidak tertingal lebih dari setengah
step. Pada saat ini torsi yang dimiliki motor akan cukup untuk memutar rotor
sampai ke arah yang diinginkan tanpa harus stall. Pada saat motor berputar
Gambar 2.8. Rotor tertunda satu step
Motor stepper melaksanakan perputaran dari satu posisi ke posisi lainnya
berdasarkan step, dimana perubahan setiap ini merupakan pengubahan
kutub-kutub magnet dari motor stepper. Setiap perubahan satu step akan membuat motor
stepper berputar dengan derajat tertentu yang biasanya antara 0,90 sampai 300
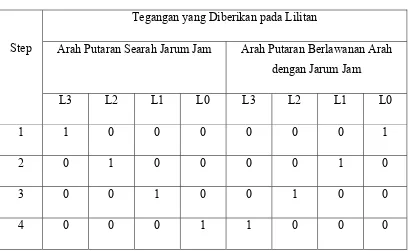
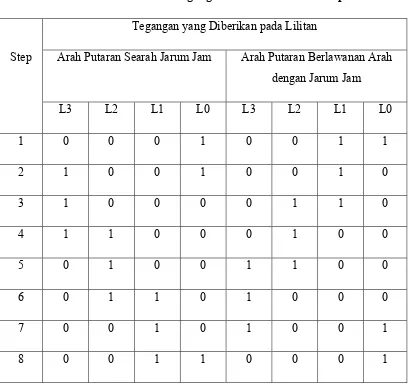
setiap step. Prinsip kerja motor stepper ada dua macam, yaitu full step dan half
step. Untuk model full step data yang diberikan pada setiap lilitan hanya 4 step
seperti pada tabel 1.1. Sedangkan untuk model half step data yang diberikan ada
sebanyak 8 step seperti pada tabel 1.2
Tabel 1.1 Pemberian Tegangan untuk Model Full Step
Step
Tegangan yang Diberikan pada Lilitan
Arah Putaran Searah Jarum Jam Arah Putaran Berlawanan Arah
dengan Jarum Jam
L3 L2 L1 L0 L3 L2 L1 L0
1 1 0 0 0 0 0 0 1
2 0 1 0 0 0 0 1 0
3 0 0 1 0 0 1 0 0
Tabel 1.2 Pemberian Tegangan untuk Model Half Step
Step
Tegangan yang Diberikan pada Lilitan
Arah Putaran Searah Jarum Jam Arah Putaran Berlawanan Arah
dengan Jarum Jam
L3 L2 L1 L0 L3 L2 L1 L0
1 0 0 0 1 0 0 1 1
2 1 0 0 1 0 0 1 0
3 1 0 0 0 0 1 1 0
4 1 1 0 0 0 1 0 0
5 0 1 0 0 1 1 0 0
6 0 1 1 0 1 0 0 0
7 0 0 1 0 1 0 0 1
8 0 0 1 1 0 0 0 1
Motor stepper adalah salah satu tipe motor yang sangat banyak
dipergunakan sebagai penggerak/pemutar pada peralatan sistem kontrol di
industri, instrumentasi dan juga pada peralatan-peralatan elektronik seperti printer
tetapi walaupun demikian pada dasarnya hanya terdapat 3 tipe motor motor
stepper :
2.2.3 Motor Stepper Type Variable Reluctance (VR)
Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang
secara struktural paling mudah untuk dipahami. Motor ini terdiri atas sebuah rotor
diberi energi dengan arus DC, kutub-kutubnya menjadi termagnetasi. Perputaran
terjadi ketika gigi-gigi rotor tertarik oleh kutub-kutub stator. Berikut ini adalah
penampang melintang dari motor stepper tipe variable reluctance (VR) :
Gambar 2.9 Penampang Melintang dari Motor Stepper Tipe Variable Reluctance
(VR)
2.2.4 Motor Stepper Type Permanent Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar (tin
can) yang terdiri atas lapisan magnet permanen yang diselang-seling dengan kutub
yang berlawanan (perhatikan gambar 2.9). Dengan adanya magnet permanen,
maka intensitas fluks magnet dalam motor ini akan meningkat sehingga dapat
menghasilkan torsi yang lebih besar. Motor jenis ini biasanya memiliki resolusi
langkah (step) yang rendah yaitu antara 750 hingga 150 per langkah atau 48 hingga
24 langkah setiap putarannya.
2.2.5 Motor Stepper Tipe Hybrid (HB)
Motor stepper tipe hybrid memiliki struktur yang merupakan kombinasi
dari kedua tipe motor stepper sebelumnya. Motor stepper tipe hybrid memiliki
tersusun secara aksial pada batang porosnya seperti motor tipe PM. Motor tipe ini
paling banyak digunakan dalam berbagai aplikasi karena kinerja lebih baik. Motor
tipe hybrid dapat menghasilkan resolusi langkah yang tinggi yaitu antara 3,60
hingga 0,90 per langkah atau 100 - 400 langkah setiap putarannya.
2.3 SENSOR LOAD CELL [ 3 ]
Load cell adalah komponen utama pada sistem timbangan digital.tingkat
keakurasian timbangan bergantung dari jenis load cell yang dipakai.sensor load
cell apabila diberi beban pada inti besi maka nilai resistansi di strain gaugenya
akan berubah yang dikeluarkan melalui empat buah kabel. Dua kabel sebagai
eksitasi dan dua kabel lainnya sebagai sinyal keluaran ke kontrolnya gambar 2.10
dibawah adalah bentuk fisik dari sensor load cell
Gambar 2.10 Bentuk fisik sensor Load cell
Sebuah load cell terdiri dari konduktor strain gauge, dan wheatstone
bridge.berikut ini beberapa penjelasan mengenai defenisi load cell.tegangan
keluaran dari sensor load cell sangat kecil, sehingga untuk mengetahui perubahan
tegangan keluaran secara linier dibutuhkan rangkaian penguat instrumen. Dalam
untuk menguatkan tegangan keluaran yang sangat kecil hingga kurang dari mili
volt, salah satunya sensor Load Cell, hingga ukuran tegangan dalam satuan mili
volt.gambar rangkaian dapat dilihat pada gambar 2.10. agar tegangan dapat
terukur secara linier digunakan penguatan sebesar 1000 kali.
2.4 RANGKAIAN INVERTING ( PENGUAT PEMBALIK
OPERASIONAL AMPLIFIER)
Konsep Dasar Teori
Defenisi Operasional Amplifier
OP – AMP ( Operasional Amplifiers ) pada hakekatnyan merupakan sejenis IC.
Didalamnya terdapat suatu rangkaian elektronik yang terdiri atas beberapa
transistor, resistor dan atau dioda jikalau suatu rangkaian, masukan dan suatu
jenis rangkaian umpan balik, maka IC ini dapat dipakai untuk mengerjakan
berbagai operasi matematika, seperti menjumlah, mengurangi, membagi, mengali,
mengintegrasi, dan sebagainya oleh karena itu IC jenis ini dinamakan penguat
operasi atau operasional amplifier, disingkat OP – AMP.
Namun demikian OP – AMP dapat pula dimanfaatkan untuk berbagai keperluan,
misalnya : sebagai penguat audio, pengaturan nada, osilator atau pembangkit
gelombang, sensor circuit, dsb. OP – AMP banyak disukai karena faktor
penguatannya besar (100.000kali).
Sejarah perkembangan OP – AMP
Pengembangan rangkaian terpadu IC luar telah ada sejak tahun 1960, pertama
telah dikembangkan pada “chip ” silikon tunggal . rangkaian terpadu merupakan
susunan antara transistor, diode sebagai penguat beda dan pasangannya
memperkenalkan IC OP – AMP pertama kali µA 702, yang mana merupakan
pengembangan IC OP –AMP yang lain sebelumnya, dimana tegangan sumber
(catu daya ) dibuat tidak sama yaitu +UCC = +12 V dan –UEE = -6 V, dan
resistor inputnya rendah sekali yaitu( KW) dan gain (3600 V/V).
KARAKTERISTIK IDEAL OP –AMP
1. Penguatan tegangan tak terhingga (Av = ~) “ penguatan tegangan
bergantung pada tegangan sumber Vcc”.
2. Impedansi input tak berhingga (Zin = ~)
3. Bandwithnya mendekati tak hingga dengan demikian delay timenya
hamper tak ada Bw = ~ ∆t = 0
4. Impedansi Out put kecil sekali (Zout = 0)
5. Vout = 0 jika Vin = 0
2.4.1 Operasi penguat Diferensial
Prinsip kerja penguat diferensial :
1. Pada saat tegangan masukan = 0 (titik dan terhubung ke
massa ), dan besarnya tegangan selisih pada kedua basis 0 pada
kedua kolektor sama besar , dan pada keluaran terjadi perubahan
tegangan pada →∆ 0
2. Pada saat tegangan masukan 0 ( titik terhubung ke massa ), dan
besarnya tegangan selisih pada kedua basis =
Ada dua kemungkinan kejadian :
1. Bila berpolaritas positif, maka pada kondisi ini arus kolektor
menyebabkan tegangan keluaran ke arah negatif ( lebih kecil
Penting untuk diketahui, bahwasanya perubahan tegangan keluaran
berlawanan arah dengan perubahan tegangan masukan
Gambar 2.11 IC LM 324
Untuk lebih jelasnya keterangan pada :
Tabel 1.3 Fungsi setiap pin
Pin No Function Name
1 Output of 1st comparator Output 1
2 Inverting input of 1st comparator Input
1-3 Non-inverting input of 1st comparator Input 1+
4 Supply voltage; 5V (up to 32V) Vcc
5 Non-inverting input of 2nd comparator Input 2+
6 Inverting input of 2nd comparator Input
2-7 Output of 2nd comparator Output 2
8 Output of 3rd comparator Output 3
9 Inverting input of 3rd comparator Input
3-10 Non-inverting input of 3rd comparator Input 3+
11 Ground (0V) Ground
12 Non-inverting input of 4th comparator Input 4+
13 Inverting input of 4th comparator Input
4-14 Output of 4th comparator Output 4
2.5 MIKROKONTROLLER 8535
Mikrokontroler adalah IC yang dapat deprogram berulang kali, baik ditulis
atau dihapus.biasanya digunakan untuk pengontrolan otomatis dan manual pada
Beberapa tahaun terakhir, mikrokontroler sangat banyak digunakan trutama dalam
pengontrolan robot.seiring perkembangan elektronika, mikrokontroler dibuat
semakin kompak dengan bahasa pemograman yang ikut juga berubah.salah
satunya adalah mikrokontroler AVR (Alfand Vegard’s Risc processor) Atmega
8535 yang menggunakan teknologi RISC ( Reduce Instruction Set Computing )
dimana program berjalan lebih cepat karena hanya memmembutuhkan satu siklus
clock untuk mengeksekusi satu instruksi program.secara umum, AVR dapat
dikelompokkan menjadi 4 kelas, yaitu kelas ATtiny, keluarga AT90xx, keluarga
ATmega, dan AT86RFxx.Pada dasarnya yang membedakan masing – masing
kelas adalah memori, peripheral, dan fungsinya.Dari segi arsitektur dan arsitektur
dan instruksi yang digunakan, mereka bias dikatakan hamper sama.
Mikrokontroler AVR ATmega 8535 memiliki fitur yang cukup lengkap,
Mikrokontroler AVR ATmega 8535 telah dilengkapi dengan ADC internal
EEPROM internal, timer / counter, PWM, analog comparator, dll). Sehingga
dengan fasilitas yang lengkap ini memungkinkan kita belajar mikrokontroler
AVR dengan lebih mudah dan efesien, serta dapat mengembangkan kreativitas
pengguna mikrokontroler ATmega 8535.
Fitur – fitur yang dimiliki oleh mikrokontroler ATmega 8535 adalah sebagai
berikut: [ 4 ]
1. Saluran I/O sebanyak 32 buah, yaitu port A,port B, port C, dan D
2. ADC internal sebanyak 8 saluran
3. Tiga buah timer/counter dengan kemampuan perbandingan CPU yang
terdiri atas 32 buah register.
5. Memori Flash sebesar 8Kb dengan kemampuan Read While Write
6. Port antarmuka SPI
7. EEPROM sebesar 512 byte yang dapat deprogram saat operasi.
8. Antarmuka komparator analog.
9. Port USART untuk komunikasi serial.
10.Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16
MHz.
11.Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16
Mhz
12. Dan lain – lainnya.
2.5.1 Konstruksi ATmega 8535
Mikrokontroler ATmega 8535 memiliki 3 jenis memori, yaitu memori
program, memori data dan memori EEPROM.ketiganya memiliki ruang
sendiri terpisah.
a) Memori program
ATmega8535 memiliki kapasitas memori progam sebesar 8 Kbyte
yang terpetakan dari alamat 0000h – 0FFFh dimana masing-masing
alamat memiliki lebar data 16 bit. Memori program ini terbagi menjadi
2 bagian yaitu bagian program boot dan bagian program aplikasi.
b) Memori data
ATmega8535 memiliki kapasitas memori data sebesar 608 byte yang
terbagi menjadi 3 bagian yaitu register serba guna, register I/O dan
SRAM. ATmega8535 memiliki 32 byte register serba guna, 64 byte
(menggunakan instuksi LD atau ST) atau dapat juga diakses sebagai
I/O (menggunakan instruksi IN atau OUT), dan 512 byte digunakan
untuk memori data SRAM.
c) Memori EEPROM
ATmega8535 memiliki memori EEPROM sebesar 512 byte yang
terpisah dari memori program maupun memori data. Memori
EEPROM ini hanya dapat diakses dengan menggunakan
register-register I/O yaitu register-register EEPROM Address, register EEPROM Data,
dan register EEPROM Control. Untuk mengakses memori EEPROM
ini diperlakukan seperti mengakses data eksternal, sehingga waktu
eksekusinya relatif lebih lama bila dibandingkan dengan mengakses
data dari SRAM. ATmega 8535 merupakan tipe AVR yang telah
dilengkapi dengan 8 saluran
ADC internal dengan fidelitas 10 bit. Dalam mode operasinya,
ADC ATmega 8535 dapat dikonfigurasi, baik secara single ended
input maupun differential input. Selain itu, ADC ATmega 8535
memiliki konfigurasi pewaktuan, tegangan referensi, mode operasi,
dan kemampuan filter derau yang amat fleksibel, ATmega 8535
memiliki 3 modul timer yang terdiri dari 2 buah sehingga dengan
mudah disesuaikan dengan kebutuhan ADC itu sendiri. timer/counter 8
bit dan 1 buah timer/counter 16 bit. Ketiga modul timer/counter ini
dapat diatur dalam mode yang berbeda secara individu dan tidak saling
mempengaruhi satu sama lain.
sumber interupsi. Masing-masing timer/counter ini memiliki register
tertentu yang digunakan untuk mengatur mode dan cara kerjanya.
Serial Peripheral Interface (SPI) merupakan salah satu mode
komunikasi serial syncrhronous kecepatan tinggi yang dimiliki oleh
ATmega8535.
Universal Syncrhronous and Asyncrhronous Serial Receiver and
Transmitter (USART) juga merupakan salah satu mode komunikasi
serial yang dimiliki oleh ATmega8535. USART merupakan
komunikasi yang memiliki fleksibilitas tinggi, yang dapat digunakan
untuk melakukan transfer data baik antar mikrokontroler maupun
dengan modul-modul eksternal termasuk PC yang memiliki fitur
UART.
2.5.2 Pin – pin pada Mikrokontroler ATmega 8535
Konfigurasi pin ATmega 8535 dengan kemasan 40 pin DIP ( Dual inline
package) dapat dilihat pada gambar .dari gambar diatas dapat dijelaskan fungsi
dari masing – masing pin ATmega 8535 sebagai berikut :
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya.
2. GND merupakan pin ground
3. Port A ( Port A0…Port A7) merupakan pin input/output dua arah dan pin
masukan ADC
4. Port B ( Port B0…PortB7 ) merupakan pin input/output dua arah dan pin
fungsi khusus, seperti dapat dilihat pada table dibawah ini.
Tabel 1.4 Fungsi khusus Port B
Pin Fungsi Khusus
PB7 SCK (SPI Bus Serial Clock)
PB6 MISO (SPI Bus Master Input/ Slave Output)
PB5 MOSI (SPI Bus Master Output/ Slave Input)
PB4 SS (SPI Slave Select Input)
PB3
AIN1 (Analog Comparator Negative Input)
OC0 (Timer/Counter0 Output Compare Match Output)
PB2 INT2 (AIN0 (External Interrupt 2 InputAnalog Comparator Positive Input) )
PB1 T1 (Timer/ Counter1 External Counter Input)
PB0
T0 T1 (Timer/Counter External Counter Input) XCK (USART External Clock Input/Output)
Port C ( Port C0…Port C7) merupakan pin in/out dua arah dan pin fungsi khusus, seperti dapat dilihat pada table dibawah ini.
Tabel 1.5 Fungsi Khusus Port C
Pin Fungsi khusus
PC1 SDA ( Two-wire Serial Buas Data Input/Output Line)
PC0 SCL ( Two-wire Serial Buas Clock Line)
Port D ( Port D0 …..Port D7) merupakan pin input/out dua arah dan pin fungsi khusu, seperti yang terlihat pada table dibawah ini.
Tabel 1.6 Fungsi khusus Port D
Pin Fungsi khusus
PD7 OC2 (Timer/Counter Output Compare Match Output)
PD6 ICP (Timer/Counter1 Input Capture Pin)
PD5 OC1A (Timer/Counter1 Output Compare A Match Output)
PD4 OC1B (Timer/Counter1 Output Compare B Match Output)
PD3 INT1 (External Interrupt 1 Input)
PD2 INT0 (External Interrupt 0 Input)
PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)
BAB III
PERANCANGAN SISTEM
3.1 Blok Diagram Rangkaian
Diagram blok pada gambar 3.1 adalah diagram rancangan dasar sistem
Perancangan sistem pengontrolan pengukuran berat pada timbangan kendaraan
secara automatis.diagram menggambarkan aliran proses dari input hingga output,
dimana input sistem ada beberapa masukan yaitu input data dari smart card dan
input data dari smart card dan berat kendaraan yang ditimbang proses kerja sistem
adalah mengolah input menjadi suatu out put yang diinginkan yang akan dibahas
lebih detail pada bagian berikutnya sebagai pemroses adalah sebuah rangkaian
pengendali yaitu mikrokontroler output sistem adalah kondisi yang diberikan oleh
mikrokontroler yaitu status proses dan kendali pintu palang, out put juga
menentukan pengiriman pesan melalui sms .
3.2 Perancangan Hardware
Rancangan rangkaian kendali Perancangan sistem pengontrolan
pengukuran berat pada timbangan kendaraan secara automatis. Rangkaian
pengendali sistem menggunakan mikrokontroler sebagai pusat pengendali untuk
seluruh kerja sistem yaitu sebagai monitoring beban dan mengendalikan input dan
output.rangkaian bekerja menerima input yaitu kendaraan masuk kemudian
diproses dengan mengukur berat kendaraan sekaligus beban yang diangkut,
kemudian memberikan output sesuai dengan kriteria yang ditentukan, rancangan
rangkaian terdiri dari beberapa bagian utama dengan fungsi kerja masing –
masing bagian. Adapun bagian – bagian sistem adalah sebagai berikut :
1. Sensor
2. Pengendali Mikrokontroler
3. Driver ( penguat arus )
4. Plant
5. Display
6. Hand phone ( pengirim pesan )
Adapun penjelasan pada point – point diatas ialah :
1.Sensor
Perancangan ini menggunakan 2 sensor input yaitu sensor :
1. Sensor RFID
2. LOAD CELL ( sensor berat )
3.2.1 Sensor RFID
Adalah sensor yang berfungsi mendeteksi atau membaca kode identitas
dengan data base yang telah di program untuk ferifikasi, jika kode RFID sesuai
maka sistem akan dapat dilanjutkan dengan mengijinkan (membuka pintu masuk )
pada kendaraan tsb.sensor RFID yang digunakan adalah sensor RFID pasif, tipe
sensor RFID yaitu ID 012 dengan kemampuan out put data serial kecepatan data
serial sensor ini adalah 9600 Bps dengan data asinkron, dengan demikian out put
data serial dapat secara langsung diberikan pada masukan serial port
mikrokontroler.
3.2.2 Sensor Load cell ( sensor berat )
Load cell merupakan salah satu sensor untuk mengukur berat ataupun
tekanan dalam rancangan ini load cell berfungsi mengukur berat kendaraan
dengan muatannya untuk mengetahui apakah berat beban yang diangkut sesuai
kategori yang ditentukan atau diluar kategori, dalam hal ini digunakan load cell
adalah tipe 110493342 dengan berat maksimal 50 kg.
Prinsip kerja load cell
Mendeteksi tekanan pelat dengan mengeluarkan nilai resistansi yang sebanding
dengan tekanan yang diberikan pada load cell dengan kata lain load cell
mendeteksi besar tegangan yang dikeluarkan pelat load cell bila diberi tekanan.
Out put tegangan load cell sangat kecil yaitu pada orde sehingga pada
prakteknya tegangan tersebut harus diperkuat dengan rangkaian penguat tegangan,
terdapat 4 buah kabel keluaran load cell yaitu untuk tegangan IN Vcc + 5 volt,
ground 0 volt dan 2 keluaran sensor. Out put load cell diberikan kepada rangkaian
3.2.3 Pengendali mikrokontroler
Fungsi mikrokontroler adalah sebagai pengendali sistem, terdapat 2 jenis
mikrokontroler yang digunakan dalam rancangan ini dengan fungsi berbeda yaitu
mikrokontroler jenis AVR ATmega 8535 dan jenis MCS AT 89S51 rancangan
menentukan dua mikrokontroler karena rancangan menggunakan dua masukan
port serial dengan mode komunikasi berbeda sehingga dua masukan tersebut tidak
dapat ditangani oleh satu mikrokontroler perbedaannya adalah kecepatan build
rate dan mode komunikasi .mikrokontroler ATmega dalam rancangan berfungsi
sebagai pengendali utama yang menangani kendali pintu palang sekaligus
mendeteksi berat dan menentukan apakah kendaraan berat kendaraan normal atau
tidak .selain itu mikrokontroler ATmega 8535 juga berfungsi sebagai pengirim
pesan pada pemilik (owner) yaitu pesan singkat sms.input mikrokontroler
ATmega 8535 adalah pada masukan analog yaitu masukan dari sensor berat yang
telah dikuatkan oleh rangkaian penguat dalam rangkaian adalah pada Pa.0 (pin
40), sedangkan out put mikrokontroler deprogram pada port B untuk kendali
motor pintu palang ( pin 1 – 8 ), out put lain yaitu pada LCD deprogram pada port
C ( Pin 22 – 29 ) .untuk komunikasi data dan ponsel digunakan port serial yaitu
Pd 0 dan Pd 1 pada pin 14 da pin 15 , pin 9 pada mikrokontroler berfungsi sebagai
RESET dan pin 12 – 13 sebagai masukan Kristal osilator .mikrokontroler ini di
program dengan bahasa C dengan menggunakan editor CV AVR Versi 2.05.
Pada mikrokontroler MCS AT89S51 berfungsi sebagai deteksi kode ID
dari kartu RFID.sensor RFID memberikan data serial melalui port serial
mikrokontroler yaitu pada port P.3.0 kode tersebut akan diferifikasi menggunakan
mengeluarkan suatu sinyal pada mikrokontroler utama, bahwa identitas adalah
benar sehingga kendaraan diizinkan untuk masuk dan sebaliknya jika kode salah
maka pintu palang tidak akan terbuka.out put mikrokontroler MCS AT89S51
diprogram pada port 01 yaitu P1 dan P1.1 pada pin 1 dan pin 2, Kristal pada pin
18 dan 19 juga berfungsi sebagai masukan clock demikian juga resistor pada pin
09 berfungsi sebagai reset.
3.2.4 Driver
Yang dimaksud dengan driver adalah suatu rangkaian yang berfungsi
sebagai penguat arus atau penguat tegangan dalam rancangan ini terdapat 2
rangkaian penguat yaitu :
1. Penguat arus
Penguat arus dirancang dengan menggunakan TR NPN yang terhubung
secara common emitter .fungsi penguat arus adalah untuk mengendalikan dan
menjalankan stepper motor.terdapat 4 buah TR untuk sebuah motor stepper
dengan demikian ada 8 TR yang digunakan untuk 2 buah motor stepper .tipe TR
yaitu BD 139 NPN penguat dirancang untuk bekerja untuk kondisi ON dan OFF
( switching )
2.Penguat tegangan ( volt )
Pada penguat tegangan menggunakan rangkaian op – amp dengan IC LM
324, fungsi penguat tegangan adalah menguatkan tegangan sensor load cell
(sensor berat) sehingga mencapai tegangan yang cukup untuk diberikan pada
masukan ADC .penguatan tegangan pada rangkaian ini lebih kurang 1000 kali .
jenis rangkaian penguat tegangan adalah penguat diferensial yaitu penguat yang
Gambar 3.2 Rangkaian Driver motor stepper.
3.2.5 Plant
Yang dimaksud dengan plant adalah objek kendali dalam hal ini adalah
pintu gerbang masuk dan keluar. Rancangan ini menggunakan motor stepper
sebagai penggerak mekanis pintu palang. Jenis motor adalah motor stepper
unipolar 4 phasa sehingga sehingga seluruh motor memiliki 4 buah kumparan
yang harus diberi arus secara berurutan. Kendali arus dilakukan oleh
mikrokontroler melalui program, merek motor stepper adalah mitsumi dengan tipe
Q 44 – 4244 dan resistansi internal 54,5 Ω ( ohm )
3.2.6 Display LCD 16 x 2
Display merupakan salah satu out put yang berfungsi menampilkan pesan
atau status sistem.dalam hal ini adalah pesan proses misalnya membuka atau
menutup pintu palang pesan data yaitu data berat muatan kendaraan yang terukur
oleh sensor dan pesan status yaitu status normal atau tidak normal. Display yang
digunakan adalah display CD tipe / M1632 yang dapat menampilkan 16 x 2
karakter .merek display adalah HITACHI dengan kode H44780. Display
15 Anoda (kabel coklat untuk
LCD Hitachi )
Tegangan positif backlight
16 Katoda (kabel merah untuk
LCD Hitachi )
Tegangan negatif backlight
3.2.7 SMS (Short Message Service)
Pengiriman sms juga merupakan out put sistem dimana, rancangan ini akan
mengeluarkan suatu pesan pada pemilih atau owner status berat kendaraan yang
masuk dan yang akan keluar. Apakah normal atau tidak normal dalam hal ini
adalah berat beban atau muatan, sebagai alat pengirim pesan digunakan ponsel
sebuah ponsel Siemens C35. Dengan komunikasi data standar AT command.
Mikrokontroler berkomunikasi data melalui port serial dengan kecepatan 19.200
Bps. Dengan format data standar yaitu AT command khusus untuk piranti merek
Siemens, pesan yang akan dikirim diformat pada kode ( Pdu ) dan dikirim ke
ponsel dengan perintah – perintah tertentu yang diatur dengan program.
SMS merupakan salah satu layanan pesan teks yang dikembangkan dan
distandarisasi oleh suatubadan yang bernama ETSI (European Telecomunication
Standards Institute) sebagai bagian dari pengembangan GSM Phase 2, yang
terdapat pada dokumentasi GSM 03.40 dan GSM 03.38. Fitur SMS ini
memungkinkan perangkat Stasiun Seluler Digital (Digital Cellular Terminal,
seperti ponsel) untuk dapat mengirim dan menerima pesan-pesan teks dengan
panjang sampai dengan 160 karakter melalui jaringan GSM. (ETSI, 1996).
SMS dapat dikirimkan ke perangkat Stasiun Seluler Digital lainnya hanya
sekedar pengiriman pesan biasa, layanan SMS memberikan garansi SMS akan
sampai pada tujuan meskipun perangkat yang dituju sedang tidak aktif yang dapat
disebabkan karena sedang dalam kondisi mati atau berada di luar jangkauan
layanan GSM.
Jaringan SMS akan menyimpan sementara pesan yang belum terkirim, dan
akan segera mengirimkan ke perangkat yang dituju setelah adanya tanda
kehadiran dari perangkat di jaringan tersebut.
Dengan fakta bahwa layanan SMS (melalui jaringan GSM) mendukung
jangkauan/jelajah nasional dan internasional dengan waktu keterlambatan yang
sangat kecil, memungkinkan layanan SMS cocok untuk dikembangkan sebagai
aplikasi-aplikasi seperti: pager, e-mail, dan notifikasi voice mail, serta layanan
pesan banyak pemakai (multiple users). Namun pengembangan aplikasi tersebut
masih bergantung pada tingkat layanan yang disediakan oleh operator jaringan.
(Gupta, 2003).
3.3 Perancangan Software
Setelah perancangan hardware selesai, kemudian mulailah dengan
perancangan software. Dalam peracangan software ini terbagi atas 2
bagian yaitu perancangan flowchart dan perancangan program.
3.3.1 Perancangan Flowchart
Adapun tujuan perancangan flowchart adlah untuk memudahkan kita di
dalam perancangan program yang akan digunakan. Flowcahat yang
tidak
Reset hardware inisialisasi port & LCD
Baca input RFID melalui kontroler sekunder
Ada kode RFID ?
ya
Verifikasi kode ID
Kode benar ?
Buka pintu gerbang masuk .
Baca berat muatan sensor dengan sensor Load cell
Baca sensor ID yang keluar gerbang ?
2 Ton
5 ?
Buka gerbang keluar , indicator hijau
Kirim pesan sms (load normal)
Buka gerbang keluar , indicator hijau
Kirim pesan sms (over load)
3.3.2 Perancangan Program
Dalam perancangan program, dibutuhkan beberapa pembagian dari
program tersebut (untuk memudahkan dalam pembuatan aplikasi per bagiannya),
adapun masing-masing pembagian program seperti berikut ini:
program bagian pertama
#include <mega8535.h>
#asm
.equ __lcd_port=0x15 ;PORTC
#endasm
#include <lcd.h>
#include <stdio.h>
#include <delay.h>
Perintah diatas adalah perintah untuk menyertakan file – file bantu pada library
yangb tersedia pada paket CV AVR misalnya file mega 8535, file LCD, dsb.
program bagian kedua
#define ADC_VREF_TYPE 0x00
#define fosc 4000000
#define baud 19200
#define ubrr_val (fosc/(16*baud))-1
#define RXC 7
Merupakan perintah untuk mendefenisikan konstanta sesuai dengan data yang
program bagian ketiga
unsigned int read_adc(unsigned char adc_input)
{
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
delay_us(10);
ADCSRA|=0x40;
while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10;
return ADCW;
}
Perintah diatas merupakan rutin untuk membaca data ADC
program bagian ketiga
// Declare your global variables here
long int W;
char buf[33],j;
perintah untuk mendeklarasikan variable sesuai dengan tipenya.
program bagian kelima
void SendMessage1(void);
void SendMessage2(void);
void Display(void);
void step_IN(void);
void step_OUT(void);
void main(void)
Perintah untuk mendeklarasikan nama rutin yang dibuat.
program bagian ke enam
PORTA=0x00;
DDRA=0x00;
PORTB=0x00;
DDRB=0xFF;
PORTC=0x00;
DDRC=0x00;
PORTD=0xFF;
DDRD=0x30;
Merupakan perintah untuk inisialisasi port dan mengisi nilai port.
program bagian ke tujuh
UCSRA=0x00;
UCSRB=0x18;
UCSRC=0x86;
UBRRH=0x00;
UBRRL=0x0C;
perintah untuk menginisialisasi port serial yaitu 19200 Bps byte dan 1 byte stop.
program bagian ke delapan
ADMUX=ADC_VREF_TYPE & 0xff;
ADCSRA=0x84;
SFIOR&=0xEF;
program bagian ke Sembilan
lcd_init(16);
perintah untuk menginisialisasi LCD.
program bagian kesepuluh
lcd_gotoxy(0,0);
lcd_putsf("LOAD MONITORING");
lcd_gotoxy(0,1);
lcd_putsf(" VIA SMS");
lcd_gotoxy(0,1);
delay_ms(1000);
perintah untuk menampilkan pesan pembuka pada LCD.
program bagian kesebelas
//SendMessage();
while (1)
{
while (PIND.6 == 1){}
Perintah untuk mendeteksi input pada port P.6 yaitu input yang diberikan oleh
sensor RFID jika berlogika 1 perintah akan menunggu hingga port P.6 berlogika
0.
program bagian keduabelas
lcd_clear();lcd_gotoxy(0,0);lcd_putsf(" OPEN GATE");PORTD=0xFF;
perintah untuk membuka pintu palang dan menampilkan pesan pintu palang
terbuka pada LCD.
program bagian ketigabelas
x1: delay_ms(2000);
perintah untuk menunda waktu 2 detik.
program bagian empatbelas
while (PIND.7 == 1){W = read_adc(0)*10;Display();if (W > 5000)
{PORTD.4 = 1;PORTD.5 = 0;}else {PORTD.4 = 0;PORTD.5 = 1;}}
merupakan perintah untuk mendeteksi pin P.7 yaitu masuk dari rangkaian RFID
untuk fase keluar. Jika port P.7 berlogika 1 maka program akan melakukan
pembacaan berat menampilkan berat pada LCD dan menghidupkan lampu
indikator sesuai dengan kondisi berat.
program bagian limabelas
if (W > 5000) {PORTD.4 = 1;PORTD.5 = 0;SendMessage2();while (W >
5000) {W = read_adc(0)*10;Display();} goto x1;}
perintah untuk mendeteksi apakah berat 5000 kg jika yam aka lampu indikator
akan merah disertai pengiriman pesan over load.
program bagian keenambelas
if ((W <= 5000)&&(W >= 2000)) {step_OUT();PORTD.4 = 0;PORTD.5
= 1;SendMessage1();}
jik berat diantara 2000 kg 5000 kg maka pintu palang akan terbuka lampu
indikator hijau dan pengiriman pesan sms load normal.
program bagian ketujuh belas
};
Jika berat dibawah 2000 kg maka indikator akan merah tidak akan terbuka.
program bagian kedelapanbelas
}
void SendMessage1(void)
{
lcd_gotoxy(0,0);
lcd_putsf(" SEND MESSAGE ");
lcd_gotoxy(0,1);
lcd_putsf(" NORMAL LOAD ");
printf("AT+CMGS=24");
delay_ms(1000);
printf("%c",0x0D);
delay_ms(2000);
printf("06912618010000B1000C810812562063820000FF0BCEB7BC1D
6683D8EF303100");
delay_ms(1000);
printf("%c",0x1A);
delay_ms(2000);
Display();
}
Merupakan perintah untuk mengirim pesan load normal yaitu perintah – perintah
untuk menampilkan status pada LCD kemudian mengirim kode sms ke ponsel dan
program bagian kesembilanbelas
void SendMessage2(void)
{
lcd_gotoxy(0,0);
lcd_putsf(" SEND MESSAGE ");
lcd_gotoxy(0,1);
lcd_putsf(" OVER LOADING ");
printf("AT+CMGS=25");
delay_ms(1000);
printf("%c",0x0D);
delay_ms(2000);
printf("06912618010000B1000C810812562063820000FF0C4F7B590E62
BEC3E4B4FB0C00");
delay_ms(1000);
printf("%c",0x1A);
delay_ms(2000);
Display();
}
Merupakan perintah untuk mengirim pesan over load yaitu perintah – perintah
untuk menampilkan status pada LCD kemudian mengirim kode sms ke ponsel dan
disertai pengiriman kode pdu ke ponsel.
program bagian keduapuluh
{lcd_clear();
lcd_gotoxy(0,0);
lcd_putsf("LOAD MONITORING");
sprintf(buf,"WEIGHT : %i kg",W);
lcd_gotoxy(0,1);
lcd_puts(buf);delay_ms(500);
}
Merupakan rutin untuk menampilkan berat terukur pada layar LCD
program bagian keduapuluh satu
void step_IN(void){
for (j=0;j<16;j++){
PORTB=0x01; delay_ms(5);
PORTB=0x03; delay_ms(5);
PORTB=0x02; delay_ms(5);
PORTB=0x06; delay_ms(5);
PORTB=0x04; delay_ms(5);
PORTB=0x0c; delay_ms(5);
PORTB=0x08; delay_ms(5);
PORTB=0x09; delay_ms(5);
}
PORTB=0x00;
delay_ms(3000);
for (j=0;j<16;j++){
PORTB=0x08; delay_ms(5);
PORTB=0x0c; delay_ms(5);
PORTB=0x04; delay_ms(5);
PORTB=0x06; delay_ms(5);
PORTB=0x02; delay_ms(5);
PORTB=0x03; delay_ms(5);
PORTB=0x01; delay_ms(5); }
PORTB=0x00; }
program pada bagian keduapuluh dua void step_OUT(void){
PORTB=0x30; delay_ms(5);
PORTB=0x20; delay_ms(5);
PORTB=0x60; delay_ms(5);
PORTB=0x40; delay_ms(5);
PORTB=0xc0; delay_ms(5);
PORTB=0x80; delay_ms(5);
PORTB=0x90; delay_ms(5);
}
PORTB=0x00;
}
Merupakan perintah untuk menggerakkan motor stepper buka dan tutup kembali
pintu keluar dengan cara yang sama.
3.4 Prinsip kerja sistem
Cara kerja sistem ini adalah dengan cara membaca output dari sensor berat,
jika berat yang diukur sesuai dengan berat yang diinginkan, maka lampu
indikator warna hijau akan menyala yang menandakan bahwa pintu palang
keluar bisa dibuka dengan menggunakan kartu pengenal (RFID) sekaligus
mengirim pesan kepada pemilik yang isi pesannya adalah load normal, dan
sebaliknya jika berat yang diukur melebihi kapasitas, maka lampu indicator
warna merah akan menyala yang menandakan bahwa pintu palang keluar
tidak bisa dibuka sekaligus mengirim pesan kepada pemilik yang isi
pesannya adalah over load. Untuk membuka pintu palang keluar solusinya
BAB IV
PENGUJIAN DAN ANALISA ALAT
4.1 Pengujian RFID
Pengujian rangkaian proximity reader adalah untuk mengetahui apakah
proximity reader dapat menbaca kode dari kartu akses dan mengirimkan
kode tersebut rangkaian mikrokontroller AVR 8535. Adapun
langkah-langkah pengujian adalah sebagai berikut :
1. Memasukkan catu daya pada rangkaian.
2. Memeriksa pin output dari RFID pada pin 9 dengan menggunakan
logika probe
4.1.1 Rangkaian RFID
VCC
5
9
1
GND
4.1.2 Data Hasil Pengujian Proximity Reader
Tabel 1.8 Data Hasil Pengujian Rangkaian Proximity Reader
Kondisi Proximity Pin 6 Tegangan Output (V)
Mengidentifikasi Pulsa Keluar 0-5
Tidak Mengidentifikasi Tidak Ada Pulsa 0
Dari hasil pengujian diperoleh data ketika proximity reader mengidentifikasi kartu
akses smart card maka pada pin 6 akan menghasilkan pulsa jika menggunakan
logic probe. Artinya RFID sedang mengeluarkan data pada pin outnya, ini berarti
bahwa proximity reader dapat melakukan fungsinya dengan baik yaitu
mengidentifikasi kartu akses yang ditandai dengan adanya pulsa keluaar dari pin
out nya, sehingga hasil pengujian sesuai degna yang diharapkan pada
perancangan.
4.2 Pengujian Rangkaian Driver Load Cell dan Penguat Operasi
Pengujian dilakukan pad rangkaian sensor yaitu load cell dan penguat
yaitu untuk menguji respon sensor terhadap berat serta fungsi penguat dalam
menguatkan sinyal keluaran sensor. Tujuannya adalah untuk menguji dan
mengetahui apakah rangkaian bekerja sesuai yang diizinkan atau tidak.
Prosedur pengujian adalah dengan mengaktifkan catu daya rangkaian dan
4.2.1 Rangkaian Pengujian Load Cell dan Penguat Operasi
Gambar 3.6 Rangkaian Pengujian Sensor Load Cell dan Penguat operasi
4.2.2 Data Hasil Pengujian Sensor Load Cell dan Penguat Operasi
Tabel 1.9 Data Hasil Pengujian Sensor Load Cell dan Penguat Operasi
10 0.8 22.2 21.2 35.4 2.25 0.05 4220
11 0.95 21.3 21.1 32.9 2.63 0.05 5000
12 0.98 21.1 20.8 32.3 2.73 0.05 5160
4.2.3 Analisa Data
1. Penguatan Tegangan (gain)
A =
=
.
. . 5 .
Tabel 2.1Hasil Analisa Data Penguat Operasi Tegangan
2. Perhitungan deviasi
Faktor pengali (Q) dalam penyesuaian berat sesungguhnya dengan berat
miniatur dari data pengujian :
Type equation here.
| |
0
0.0 5
Tabel 2.2 Data Percobaan Perhitungan Deviasi
NO
3 0.24 1240 5166.666667 0.240920222 0.00092
4 0.32 1640 5125 0.318636423 0.001364
5 0.4 2060 5150 0.400238433 0.000238
6 0.48 2480 5166.666667 0.481840444 0.00184
7 0.56 2900 5178.571429 0.563442455 0.003442
8 0.64 3340 5218.75 0.648930275 0.00893
9 0.72 3770 5236.111111 0.732475191 0.012475
10 0.8 4220 5275 0.819905917 0.019906
11 0.95 5000 5263.157895 0.971452508 0.021453
4.2.4 Grafik Berat Tampilan Output Terhadap Berat Sesungguhnya
Gambar 3.7 Grafik Berat Tampilan Output Terhadap Berat Sesungguhnya
4.3 Pengujian Rangkaian Driver Motor Stepper atau Penguat Arus
Pengujian dilakukan pada rangkaian penguat arus yaitu penguat untuk
menjalankan motor stepper, pengujian dilakukan dengan memberikan input pada
rangkaian driver dan mengukur tegangan input dan output yaitu pada basis dan
4.3.1 Rangkaian Driver Motor Stepper atau Penguat Arus
Gambar 3.8 Rangkaian Driver Motor Stepper atau Penguat Arus
4.3.2 Data Pengujian Rangkaian Driver Motor Stepper atau Penguat Arus
Tabel 2.3 Data Pengujian Rangkaian Driver Motor Stepper atau Penguat Arus
Logika VB1(V) VB2(V) VB3(V) VB4(V) VC1(V) VC2(V) VC3(V) VC4(V)
Keadaan Kumpran
0 0 0 0 0 12.41 12.41 12.41 12.41 OFF
1 0.61 0.61 0.61 0.61 0.2 0.2 0.2 0.2 ON
4.3.3 Analisa data
Logika 1 ,
=
; 0