MODIFIKASI INSTRUMEN PENGUKUR GAYA TARIK
(
PULL
) DAN KECEPATAN MAJU TRAKTOR RODA 2
Oleh : Galisto A. Widen
F14101121
2006
DEPARTEMEN TEKNIK PERTANIAN FAKULTAS TEKNOLOGI PERTANIAN
MODIFIKASI INSTRUMEN PENGUKUR GAYA TARIK (PULL) DAN KECEPATAN MAJU TRAKTOR RODA 2
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknologi Pertanian
Fakultas Teknologi Pertanian Institut Pertanian Bogor
Oleh : Galisto A. Widen
F14101121
2006
DEPARTEMEN TEKNIK PERTANIAN FAKULTAS TEKNOLOGI PERTANIAN
DEPARTEMEN TEKNIK PERTANIAN FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
MODIFIKASI INSTRUMEN PENGUKUR GAYA TARIK (PULL) DAN KECEPATAN MAJU TRAKTOR RODA 2
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar SARJANA TEKNOLOGI PERTANIAN
Fakultas Teknologi Pertanian Institut Pertanian Bogor
Oleh : Galisto A. Widen
F14101121
Dilahirkan pada tanggal 13 Febuari 1982 di desa Rodok, Kalimantan tengah
Menyetujui, Bogor, Januari 2006
Dr. Ir. Tineke Mandang., MS Dr. Ir. I Dewa Made S., M.Agr Dosen pembimbing I Dosen pembimbing II
Mengetahui,
Galisto A. Widen. F14101121. Modifikasi Instrumen Pengukur Gaya Tarik (Pull) dan Kecepatan Maju Traktor Roda 2. Di bawah Bimbingan : Dr. Ir. Tineke Mandang, MS dan Dr. Ir. I Dewa Made S., M.Agr. 2006.
RINGKASAN
Traktor roda 2 telah banyak digunakan di Indonesia terutama untuk pengolahan tanah pada lahan sawah. Dengan banyaknya produk traktor yang ada baik dari dalam maupun luar negeri, maka perlu dilakukan pengujian tenaga tarik dari traktor tersebut untuk kondisi lahan-lahan pertanian di Indonesia. Tentunya untuk mendapatkan tenaga tarik yang nyata (riil) perlu dilakukan pengujian dilapangan yaitu dengan mengukur gaya tarik (pull) dan kecepatan maju dari traktor tersebut. Dimana, tenaga tarik berbanding lurus dengan perkalian antara gaya tarik
(pull) dengan kecepatan maju traktor yang diuji.
Banyak metode pengujian yang digunakan untuk menentukan gaya tarik dan kecepatan maju traktor roda 2. Tetapi, banyak dari metode-metode pengujian yang umum digunakan tidak effisien baik dari jumlah tenaga kerja maupun biaya untuk melakukan pengujian tersebut. Sedikitnya dibutuhkan 4 orang dalam mengukur gaya tarik (pull) dan kecepatan maju traktor untuk menentukan tenaga tarik dan dibutuhkan biaya kurang lebih Rp 300 ribu untuk biaya tenaga kerja, konsumsi dan bahan bakar.
Instrumen pengukur gaya tarik (pull) dan kecepatan maju traktor roda 2 yang dirancang pada penelitian ini bertujuan untuk mengurangi biaya dan jumlah tenaga kerja pada pengujian traktor khususnya untuk menentukan tenaga tarik traktor roda 2.
Instrumen pengukur gaya tarik (pull) traktor roda 2 terdiri dari a) rangka utama, b) sensor (loadcell), c) drum penggulung kawat sling, d). mekanisme batang hubung, dan e) sistem pembebanan (pengereman). Rangka utama dan batang hubung dibuat dengan menggunakan besi siku dan besi pejal dengan ukuran 4x4 cm. Silinder penggulung kawat berdiameter 32 cm dan lebar 18 cm terbuat dari pipa besi dan besi plat. Sistem pembebanan terdiri dari roda sepeda dan besi ulir untuk menekan roda sepeda sehingga memberikan efek pengereman. Pengukuran gaya tarik dilakukan dengan menempatkan drum penggulung tali sling pada titik gandeng
(hitch point) traktor kemudian traktor dimajukan dalam jarak tertentu dengan
berbagai tingkat pembebanan (pengereman). Keluaran dari sensor (loadcell) gaya tarik ditampilkan pada alat peraga (handy strain meter), keluaran dari handy strain
dalam satuan (mε) perlu diubah menjadi satuan gaya tarik yaitu Newton dengan menggunakan persamaan yang didapat pada prose kalibrasi.
Instrumen pengukur kecepatan maju terdiri dari sensor cahaya yaitu photo
interuptor, piringan bercelah, rangkaian tambahan dan AVO meter. Sensor photo
pengukur gaya tarik, kecepatan maju didapat dengan mengubah keluaran (volt) dari instrumen pengukur kecepatan maju menjadi kecepatan putar (rpm) drum penggulung tali sling, kemudian kecepatan putaran drum penggulung tali sling diubah menjadi kecepatan maju traktor yang diuji (kecepatan linier).
Uji fungsional dilakukan untuk mengevaluasi kedua instrumen hasil perancangan. Sebelum dilakukan uji lapang, kedua instrumen dikalibrasi terlebih dahulu untuk medapatkan karakteristik dari kedua instrumen. Berdasarkan hasil kalibrasi instrumen pengukur gaya tarik (pull) didapatkan persamaan Y=0.4589X+0.1544 dengan R2=0.9993 dimana Y adalah beban (kg) dan X adalah regangan loadcell (mε). Berdasarkan hasil kalibrasi sensor kecepatan maju traktor didapatkan persamaan Y= 40.141x-0.9608 dengan R2=0.9959 dimana Y merupakan kecepatan putar drum penggulung tali sling (rpm) dan X merupakan tegangan keluaran yang terbaca pada AVO meter (Volt).
Berdasarkan hasil uji fungsional, instrumen pengukur gaya tarik (pull)
traktor roda 2 menunjukkan bahwa instrumen pengukur gaya tarik (pull) traktor roda 2 dapat berfungsi seperti yang diharapkan yaitu mengukur gaya tarik (pull)
traktor roda 2. Semua bagian dari instrumen sudah dapat berfungsi dengan baik. Rangka utama dapat menopang drum penggulung kawat sling, batang hubung dan
load cell. Batang hubung juga mampu menahan berat dari drum penggulung kawat
sling dan tidak rusak akibat tarikan traktor. Sedangkan pada instrumen pengukur kecepatan maju menunjukkan sensor kecepatan maju dapat berfungsi dengan baik walaupun terdapat beberapa kekurangan. Baik pada saat kalibrasi maupun uji fungsional sensor photo interuptor mengalami gesekan dengan piringan bercelah, gesekan yang terjadi mengakibatkan tutup bercelah dari sensor yang terbuat dari plastik terkikis. Gesekan yang terjadi dapat mengakibatkan celah pada sensor tertutup sehingga mengurangi intensitas cahaya inframerah dari transmitter menuju ke photo dioda yang mengakibatkan hasil pengukuran tidak tepat.
Berdasarkan hasil uji fungsional instrumen pengukur gaya tarik (pull)
KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadapan Tuhan YME yang telah memberikan segala kasih dan anugerah-Nya kepada penulis dalam menyelesaikan penelitian dan penyusunan skripsi yang berjudul Modifikasi Instrumen Pengukur Gaya Tarik (Pull) dan Kecepatan Maju Traktor Roda 2.
Penulisan skripsi ini berdasarkan pada penelitian yang dilakukan di Laboratorium Lapangan Teknik Mesin Pertanian (Lab. TMBP) dan Laboratorium Instrumentasi dan Kontrol (Bagian Ergotronika). Penelitian ini berlangsung selama 8 bulan, dimulai dari tanggal 3 April 2005 sampai dengan tanggal 11 September 2005.
Penulis pada kesempatan ini mengucapkan terima kasih kepada pihak-pihak yang telah membimbing dan membantu baik dalam persiapan, pelaksanaan sampai penyusunan skripsi ini kepada :
1. Dr. Ir. Tineke Mandang, MS, sebagai dosen pembimbing akademik I (satu) yang telah memberikan arahan dan bimbingan selama penelitian sampai penulisan skripsi ini.
2. Dr. Ir. I Dewa Made S., M.Agr, sebagai dosen pembimbing II (dua) yang telah banyak memberikan bantuan selama penelitian sampai penulisan skripsi ini. 3. Ir. Sri Mudiastuti, M. Eng, selaku dosen penguji yang telah memberikan
masukan dan saran dalam penyempurnaan skripsi ini.
4. Dr. Ir. Wawan Hermawan, MS, atas bantuan dan sarannya selama pelaksanaan penelitian ini dilakukan.
5. Bapak Abas dan bapak Muhalimin selaku teknisi Laboratorium TMBP yang telah membantu dalam pembuatan kedua instrumen.
6. Bapak, ibu (alm), o’m dan tante beserta seluruh keluarga atas doa, kasih sayang dan dukungan kepada penulis.
7. Teman-teman di Teknik Pertanian IPB dan semua pihak yang telah membantu yang tidak dapat penulis sebutkan satu persatu
DAFTAR ISI
Halaman
KATA PENGANTAR ... i
DAFTAR ISI ... ii
DAFTAR TABEL ... iv
DAFTAR GAMBAR ... v
DAFTAR LAMPIRAN ... viii
I.
PENDAHULUAN ... 1
A. Latar Belakang ... 1
B. Tujuan Penelitian ... 1
II.
TINJAUAN PUSTAKA ... 2
A. Traktor Roda 2 ... 2
B. Gaya Tarik (Pull) dan Pengukurannya ... 3
C. Kecepatan Maju Traktor dan Pengukurannya ... 7
D. Tenaga tarik (Drawbar Power) ... ..9
E. Slip roda ... 10
F. Material Konstruksi Rangka ... 11
III.
METODOLOGI PENELITIAN ... 13
A. Tempat dan Waktu Pelaksanaan Penelitian ... 13
B. Alat dan Bahan ... 13
C. Tahapan Penelitian ... 14
a. Analisis masalah ... 14
b. Perancangan konsep ... 16
c. Konstruksi intrumen ... 16
d. Pengujian ... 19
e. Dokumentasi ... 26
IV.
ANALISIS RANCANGAN DAN KONSTRUKSI ALAT ... 27
A. Instrumen Pengukur Gaya Tarik ... 27
V.
HASIL DAN PEMBAHASAN ... 33
A. Instrumen Pengukur Gaya Tarik (Pull
)
... 33
a. Pembuatan alat pengukur gaya tarik (pull) traktor roda 2 ... 33
b. Kalibrasi alat pengukur gaya tarik traktor roda 2 (pull) ... 36
B. Instrumen Pengukur Kecepatan Maju ... 38
a. Pembuatan instrumen pengukur kecepatan maju ... 38
b. Kalibrasi sensor kecepatan maju ... 41
C. Uji fungsional instrumen pengukur gaya tarik (pull) dan instrumen
pengukur sensor kecepatan maju ... 42
a. Uji fungsional instrumen pengukur drawbar pull ... 43
b. Uji Fungsional sensor kecepatan maju ... 47
VI.
KESIMPULAN DAN SARAN ... 54
A. Kesimpulan ... 54
B. Saran ... 55
VII.
DAFTAR PUSTAKA ... 56
DAFTAR TABEL
Halaman
Tabel 1 Kisaran nilai gaya traktor roda 2 dengan jarak antar sirip 12.33 cm ... 4
Tabel 2 Kisaran nilai kecepatan maju traktor roda 2 ... 7
Tabel 3 Bagian-bagian dari instrumen pengukur gaya tarik (pull) ... 17
Tabel 4 Faktor-faktor koreksi daya yang akan ditransmisikan (fc) ... 29
Tabel 5 Data pengukuran gaya tarik ( pull) dengan menggunakan instrumen
pengukur gaya tarik (pull) traktor roda 2 ... 46
Tabel 6 Data pengukuran kecepatan maju traktor roda 2 diukur manual dan
slip roda (diukur manual) ... 48
Tabel 7 Data kecepatan maju traktor roda 2 dengan menggunakan instrumen
pengukur kecepatan maju traktor roda 2 dan slip roda (diukur manual) .... 49
DAFTAR GAMBAR
Halaman
Gambar 1 Pengukuran beban tarik traktor 2 roda menggunakan beban
traktor
roda
4
...
4
Gambar 2
Dynamometer sederhana untuk mengukur gaya tarik traktor ... 5
Gambar 3 Perlengkapan pengukuran kemampuan traksi roda bersirip gerak
dengan sirip berpegas dan sirip karet pada tanah basah ... 6
Gambar 4 Instrumen pemberi beban tarik... 7
Gambar 5 Grafik hubungan antara kecepatan maju traktor dengan gaya tarik
traktor secara teoritis pada berbagai macam tingkat transmisi traktor ... 8
Gambar 6 Grafik hubungan tenaga maksimum yang tersedia untuk sebuah traktor .. 9
Gambar 7 Grafik hubungan antara slip roda dengan gaya tarik (drawbar pull)
traktor
...
11
Gambar 8 Berbagai bentukmaterial baja yang digunakan untuk membuat rangka .. 12
Gambar 9 Tahapan penelitian ... 15
Gambar 10 Proses konstruksi instrumen ... 17
Gambar 11 Kombinasi emmiter-penyensor, (a)Photo Interupter; (b) reflektor ... 19
Gambar 12 Skema pengujian ... 19
Gambar 13 Gaya-gaya yang bekerja pada instrumen pengukur gaya tarik (pull) dan
traktor uji ... 20
Gambar 14 Diagram metode pengujian instrumen pengukur kecepatan maju dan
gaya
tarik
(pull) traktor roda 2 ... 21
Gambar 15 Skema kalibrasi instrumen pengukur gaya tarik (pull) ... 22
Gambar 16 Skema kalibrasi instrumen pengukur kecepaan maju ... 23
Gambar 17 Material untuk membuat rangka (a) besi siku (angle) (b) besi kotak
pejal
(hollow square)... 27
Gambar 18 Drum penggulung kawat ... 28
Gambar 19 Piringan bercelah yang terbuat dari PCB ... 31
Gambar 21 Sensor pengukur gaya tarik ... 34
Gambar 22 Drum penggulung kawat ... 35
Gambar 23 Komponen batang hubung ... 35
Gambar 24 Sistem pembebanan (pengereman) ... 36
Gambar 25 Kalibrasi instrumen pengukur gaya tarik (pull) ... 37
Gambar 26 Grafik hubungan antara regangan loadcell (m
ε
) dengan
beban
mati
(kg)
...
38
Gambar 27 Sensor cahaya (photo interuptor) ... 39
Gambar 28 Piringan bercelah yang terbuat dari PCB ... 39
Gambar 29 (a) Pengecekan timer pada rangkaian tambahan,
(b) rangkaian tambahan ... 40
Gambar 30 Pulsa dari IC 556 yang dirangkai sedemikian rupa sehingga
menghasilkan 2 jenis pulsa yaitu astabil dan monostabil multivibrator ... 40
Gambar 31 Alat AVO meter digital ... 41
Gambar 32 Peralatan yang digunakan pada saat kalibrasi instrumen
pengukur kecepatan maju ... 41
Gambar 33 Grafik hubungan antara kecepatan putar (rpm) dengan tegangan (V)
keluaran dari instrumen pengukur kecepatan maju traktor roda 2 ... 42
Gambar 34 (a) Instrumen diikatkan pada lower link traktor roda 4 pada saat
pengujian di Leuwikopo; (b) Instrumen diikatkan pada roda trailer
pada saat instrumen digunakan untuk pengujian roda besi di lahan
sawah baru ... 43
Gambar 35 (a) Gaya tarik pada instrumen tidak horizontal melainkan membentuk
sudut dengan bidang horizontal; (b) Skema posisi tali sling pada saat
pengujian membentuk sudut
α
... 45
Gambar 36 Sistem pengereman yang bergesekan dengan rangka ... 46
Gambar 37 Persiapan uji fungsional instrumen pengukur gaya tarik (pull)
dan
kecepatan
maju
traktor roda 2 ... 47
Gambar 39 Grafik hubungan antara kecepatan maju dengan slip roda traksi ... 50
Gambar 40 Grafik hubungan antara kecepatan maju dengan gaya tarik (pull) ... 51
Gambar 41 Grafik hubungan antara tenaga tarik (drawbar power) dengan gaya
tarik (pull) ... 52
Gambar 42 Grafik hubungan antara tenaga tarik (drawbar power) dengan
DAFTAR LAMPIRAN
Lampiran 1. Gambar detail sistem pembebanan (pengereman) ... 58 Lampiran 2. Gambar detail drum penggulungan kawat sling ... 60 Lampiran 3. Instrument pengukur gaya tarik (pull) traktor roda 2 ... 61 Lampiran 4. Data hasil kalibrasi Instrumen pengukur gaya tarik (pull)
traktor roda 2 ... 62 Lampiran 5. Skema perangkaian instrumen pengukur kecepatan maju
traktor roda 2 ... 63 Lampiran 6. Skema Instrumen pengukur kecepatan maju traktor roda 2
(Sensor photo interuptor) ... 64 Lampiran 7. Piringan bercelah yang terbuat dari PCB ... 65 Lampiran 8. Skema Instrumen pengukur kecepatan maju traktor roda 2
(Rangkaian tambahan) ... 66 Lampiran 9. Skema perangkaian timer pada instrumen pengukur
I. PENDAHULUAN
A. LATAR BELAKANG
Penggunaan traktor pertanian khususnya traktor roda 2 pada pertanian lahan sawah di Indonesia memberikan dampak positif, terutama dalam meningkatkan kapasitas, effisiensi dan kenyamanan kerja. Jumlah traktor roda 2 di Indonesia sekitar 27 ribu unit. Jumlahnya akan terus meningkat mengingat kebutuhan nasional untuk menggarap lahan sawah seluas 8.5 ribu juta ha di Indonesia, yaitu sekitar 532 ribu unit (Sugondo, 1999).
Penggunaan traktor khususnya traktor roda 2 untuk pengolahan sawah kadangkala mengalami hambatan seperti kurangnya tenaga tarik yang dihasilkan. Besarnya tenaga tarik yang dapat diberikan oleh traktor umumnya dibatasi oleh alat traksinya dan kondisi lahan (Gill dan Berg, 1968). Gaya tarik (pull) yang maksimum didapatkan pada saat gaya traksi maksimum dan tahanan guling yang minimum. Kondisi lahan di lapangan tidak selalu sesuai dengan rancangan traktor dan alat traksinya, hal ini dapat menyebabkan kemampuan traksi traktor menurun.
Salah satu cara untuk meningkatkan tenaga tarik traktor adalah dengan meningkatkan gaya traksi dari traktor tersebut. Berbagai alat traksi telah banyak dikembangkan dan dibuat untuk meningkatkan tenaga tarik traktor salah satunya adalah roda besi bersirip. Untuk itu, diperlukan metode pengujian kemampuan traksi roda sirip di lahan sawah. Selain itu, instrumen pengujian yang lebih akurat dan lengkap serta effisien perlu dirancang dan dibuat untuk mengukur pengaruh dari alat traksi terhadap tenaga tarik traktor.
B. TUJUAN PENELITIAN
Tujuan penelitian ini adalah memodifikasi instrumen untuk mengukur gaya tarik (pull) dan kecepatan maju traktor roda 2 hasil rancangan Rangkuti (2002). Instrumen yang dimodifikasi meliputi :
1. Instrumen pengukur gaya tarik (pull). Modifikasi dilakukan terhadap sensor pengukur gaya tarik dan rangka instrumen.
II. TINJAUAN PUSTAKA
A. TRAKTOR RODA 2
Menurut sakai et al.,(1998), traktor roda 2 mempunyai banyak nama yaitu : traktor berporos tunggal, traktor tangan, traktor kebun, traktor jalan dan sebagainya. Berdasarkan tenaga dari mesin yang digunakan oleh traktor roda 2 dapat dibagi menjadi 5, yaitu:
1. Tipe Mini Tiller (2-3 PS)
Ini adalah tipe terkecil dari traktor roda 2. Mesin ini digunakan untuk berkebun di sekitar rumah, bukan untuk suatu usaha tani profesional. Mesin ini disebut motor-tiller atau cultivatior tanpa roda. 2. Tipe Traksi (4-6 PS)
Mesin ini digunakan untuk membajak dengan bajak dan mengangkut dengan gandengan dan tidak dipakai untuk pengolahan dengan rotari. Mesin ini dapat disebut power tiller dan mampu untuk menggantikan dan mengungguli ternak sebagai sumber tenaga tarik.
3. Tipe Ganda (5-7 PS)
Tipe ini berukuran sedang, berada antara tipe traksi dan tipe gerak. Traktor jenis ini dapat melakukan pembajakan dan menggunakan bajak rotari dengan lebar lintasan yang sempit. Kinerja multigunanya lebih baik dibandingkan dengan tipe gerak tetapi kinerja pembajakannya lebih rendah.
4. Tipe Gerak (7-14 PS)
Mesin ini mengolah tanah dengan menyalurkan tenaga tarik traktor secara mekanis pada alat pengolahan tanah yang dipasang di belakang kedua roda traktor. Ini adalah mesin khusus untuk mengolah tanah. Mesin khusus yang dilengkapi dengan alat pengolah tanah rotari disebut rotary power tiller.
Rotary power tiller melakukan pemotongan tanah dan penggaruan
multigunanya rendah karena ukurannya besar dan berat. Berat traktor bersama alat pengolah tanah rotari adalah 300-400 kgf.
5. Tipe Thai (8-12 PS)
Ini adalah mesin dengan struktur sederhana yang dibuat secara lokal menggunakan motor diesel dengan pendinginan air, batang kendalinya lebih panjang, dan lebih berat dari traktor roda 2 tipe traksi yang biasa. Berat mesin dengan roda sangkar adalah 350-450 kg gaya, yang kuat untuk membajak dan menarik trailer, akan tetapi kemampuan multigunanya sangat terbatas.
Traktor roda 2 dan peralatannya dapat dimiliki petani karena harganya murah dan dapat dioperasikan oleh semua anggota keluarga karena sederhana dan mudah dikendalikan. Petani juga dapat diyakinkan bahwa hampir semua pekerjaan yang dapat dilakukan dengan tenaga ternak, dapat juga dikerjakan oleh traktor roda 2, sementara pengetahuan teknis dari usaha tani konvensional masih terus dapat mereka gunakan (Sakai et al., 1998).
B. GAYA TARIK (PULL) DAN PENGUKURANNYA
Suastawa et al. (2000) menyatakan bahwa drawbar pull merupakan gaya tarik (pull) bersih yang diperlukan agar sebuah traktor dapat bergerak di atas suatu permukaan bidang gerak. Drawbar pull yang dihasilkan tergantung pada jenis mesin yang digunakan dan kondisi tanah dimana traktor digunakan serta distribusi berat pada roda traksi.
Gaya tarik optimum (pull) traktor roda 2 dengan roda besi bersirip pada saat mengolah lahan di sawah yang bertekstur debu-berpasir-liat menurut Triratanasirichai (1991) sebesar 400 N. Roda besi bersirip yang digunakan adalah roda besi bersirip kaku dengan jarak antar sirip yang berbeda-beda, yaitu : 12.33 cm, 16.44 cm, 24.66 cm, 32.88 cm dan sudut sirip yang berbeda juga, yaitu : 15˚, 30˚, 45˚, 60˚, dan 75˚. Kisaran gaya tarik traktor roda 2 disajikan pada tabel 1.
Tabel 1. Kisaran nilai gaya traktor roda 2 dengan jarak antar sirip 12.33 cm (Triratanasirichai, 1999)
Jenis tanah Efesiensi
traksi (%) Slip (%)
Drawbar
power (watt)
Tenaga Pada poros roda
(watt)
Gaya tarik
(pull) (N)
Berpasir 35-66 20-40 50-96 143-145 133-256
Tanah sawah 45-68 20-40 90-150 200-221 240-400
Dari tabel 1 diatas dapat diketahui bahwa gaya tarik traktor roda 2 pada tanah sawah berkisar 240 N- 400 N. Sedangkan pada tanah berpasir gaya tarik traktor roda 2 berkisar antara 133.3 N-256 N.
Metode pengukuran gaya tarik traktor roda 2 yang digunakan Triratanasirichai (1999) dilakukan dengan memberi beban yang ditarik oleh traktor roda 2, yaitu sebuah traktor roda 4. Cara ini dapat mengukur gaya tarik yang dapat dihasilkan oleh traktor roda 2. Untuk mengukur gaya tariknya digunakan sebuah sensor (loadcell) yang dipasang diantara kawat penarik dan traktor roda 4 (pemberi beban/traktor beban) seperti yang disajikan pada gambar 1.
Dengan metode yang hampir mirip Crossley dan Kilgour (1983) menggunakan beban tarik berupa traktor (pengereman sebagai beban) atau trailer yang diisi dengan beban. Instrumen yang digunakan adalah sebuah
dynamometer yang terdiri dari batang hubung sederhana dan pegas (gambar
2). Gaya tarik yang terjadi dapat dicari dengan menggunakan rumus:
a b R P b R a
P× = × ∴ = × ... (1) di mana : P = gaya tarik (pull)
a = jarak dari pivot ke rantai
b = panjang cantilever dari pivot
R = dynamometer
Gambar 2. Dynanometer sederhana untuk mengukur gaya tarik traktor Traktor beban
Dalam skala laboratorium, Sudianto (2000) telah melakukan pengukuran kemampuan traksi roda besi bersirip pada tanah basah dalam bak tanah. Pada bak tanah ini terdapat sebuah roda besi bersirip yang digerakkan oleh motor listrik. Roda besi yang digerakkan akan menarik kawat yang dihubungkan dengan pemberat yang menahan laju dari roda. Diantara rangka penarik dan bebannya dipasang sebuah transducer gaya tipe cincin untuk mengukur gaya tarik atau beban tariknya. Beban tarik dapat diatur sesuai keinginan dengan menambah atau mengurangi jumlah beban mati pada sistem pembebanannya seperti dapat dilihat pada gambar 3.
Gambar 3. Perlengkapan pengukuran kemampuan traksi roda bersirip gerak dengan sirip berpegas dan sirip karet pada tanah basah (Sudianto, 2000)
Gambar 4. Instrumen pemberi beban tarik (Rangkuti,. 2002)
C. KECEPATAN MAJU TRAKTOR DAN PENGUKURANNYA
Kecepatan maju traktor merupakan salah satu faktor yang penting untuk mengetahui tenaga tarik yang dihasilkan traktor roda 2. Menurut Sakai
et al.,(1998) kecepatan maju traktor roda 2 untuk kegiatan pengolahan lahan pertanian berkisar antara 0.25 m/s – 1.2 m/s. Kisaran kecepatan maju traktor roda 2 disajikan pada tabel 2.
Tabel 2. Kisaran nilai kecepatan maju traktor roda 2 (Sakai et al.,1998). Jenis kegiatan Kecepatan maju traktor roda 2
cm/detik km/jam m/detik Pengolahan tanah dengan rotary 35-50 0.9-1.8 0.25-0.5 Berbagai kerja dilapangan* 50-70 1.8-2.5 0.5-0.7
Membajak 70-120 12.5-4.3 0.7-1.2
Transportasi** - 15, 20, 30 4.2, 5.6, 8.3
Catatan : * melumpur, menyiangi, menanam, membabat, dan sebagainya.
** UU lalu lintas menentukan kecepatan legal. kecepatan maksimum mungkin ditentukan oleh kebiasan lokal
Rangkuti (2002) membuat instrumen pengukur kecepatan maju traktor roda 2 dengan menggunakan prinsip putar dari silinder gulungan lilitan kawat sling yang ditarik traktor. Instrumen pengukur kecepatan maju ini dibuat menggunakan sensor photo dioda yang membaca masukan berupa cahaya yang melewati celah (lubang) pada sisi piringan yang berputar. Celah pada Sistem pembebanan
(pengereman)
Drum penggulung kawat sling
tersebut akan diolah oleh rangkaian elektronik digital to analog converter
(DAC) yang akan mengubah data digital menjadi analog dan dihubungkan ke
data analyzer.
Metode pengukuran kecepatan maju dari traktor roda 2 yang biasa dilakukan adalah dengan mengukur waktu yang diperlukan traktor roda 2 untuk menempuh jarak tertentu. Kecepatan maju traktor dapat dihitung dengan menggunakan rumus berikut:
t s
v= ... (2) di mana : s = jarak tempuh (m),
t = waktu tempuh (detik), dan
v = kecepatan maju traktor (m/detik)
Hubungan antara kecepatan maju dengan gaya tarik (pull) traktor dapat dilihat pada gambar 5. Berdasarkan gambar 5, dapat disimpulkan bahwa semakin besar kecepatan maju maka drawbar pull akan semakin rendah.
Gambar 5. Grafik hubungan antara kecepatan maju traktor dengan gaya tarik
(drawbar pull) traktor secara teoritis pada berbagai macam tingkat transmisi traktor (Crossley dan Kilgour, 1983).
Keterangan :
Traktor yang digunakan diasumsikan memiliki :
Tenaga mesin maksimum 33 kW @ 2250 rpm
Berat 1450 kgf (14.2kN)
Ukuran roda Roda 10-28
Transmisi
1 205/1 4 51/1
2 137/1 5 31/1
3 75/1 6 19/1
Kecepatan maju (m/s)
D. TENAGA TARIK (DRAWBAR POWER)
Drawbar power dari traktor adalah tenaga yang dihasilkan pada titik gandeng (drawbar) dan dapat dimanfaatkan untuk pekerjaan tarik. Besarnya
drawbar power dapat dihitung berdasarkan persamaan berikut:
V DbP
Db= × ... (3) di mana : Db = drawbar power (watt)
Dbp = drawbar pull rata-rata(N) V = kecepatan maju rata-rata (m/s)
Traktor dengan tenaga yang sama belum tentu memiliki gaya tarik maupun kecepatan maju yang sama. Traktor dengan tenaga 10 kw akan memiliki gaya tarik yang besar dan kecepatan maju yang rendah jika traktor ini digunakan untuk pengolahan tanah atau kegiatan-kegiatan lainnya yang memerlukan gaya tarik yang besar. Sedangkan, untuk kegiatan transportasi yang lebih memerlukan kecepatan dibandingkan gaya tarik akan memiliki kecepatan yang tinggi dengan gaya tarik yang kecil .
Gambar 6. Grafik hubungan tenaga maksimum yang tersedia untuk sebuah traktor (Crossley dan Kilgour, 1983).
Kecepatan maju (m/s)
Tenaga maksimum (diasumsikan) 10 kw
Draw
bar pull
Hubungan antara tenaga tarik (drawbar power), gaya tarik (pull) dan kecepatan maju dapat dilihat pada gambar 6. Pada titik A dengan gaya tarik sebesar 1 kN dan kecepatan 10 m/s umumnya digunakan untuk transportasi, karena dengan gaya tarik (pull) yang kecil traktor tidak akan dapat menarik implemen untuk mengolah tanah. Pada titik B dengan gaya tarik (pull) sebesar 10 kN dan kecepatan 1 m/s dapat digunakan untuk mengolah tanah atau menarik implemen karena dengan gaya tarik (pull) yang maksimum traktor dapat digunakan untuk menarik implemen dalam pengolahan tanah seperti bajak bahkan pada kondisi tanah yang keras sekalipun.
E. SLIP RODA
Slip roda merupakan perbandingan antara selisih jarak tempuh aktual dan jarak tempuh teoritis. Slip roda traksi dapat dihitung dengan menggunakan rumus: % 100 × ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = Jtt Jb Jtt
S ... (4) Dalam hal ini :
S : slip roda traksi (%)
Jtt : jarak tempuh teoritis tanpa beban dalam 10 putaran roda (m)
Jb : jarak tempuh aktual dalam 10 putaran roda traksi dengan beban (m) Putaran roda teoritis dapat dihitung dengan menggunakan rumus :
g
g r
r
Jtt=10(2π× )=20π× ... (5) Dalam hal ini :
Jtt : jarak tempuh teoritis tanpa beban dalam 10 putaran roda (m)
rg : jari-jari gelinding roda traksi (m)
Gambar 7.Grafik hubungan antara slip roda dengan gaya tarik (drawbar pull)
traktor (Crossley dan Kilgour, 1983).
F. MATERIAL KONSTRUKSI RANGKA
Pengertian terhadap material adalah dasar untuk mempelajari sifat dari struktur rangka dan dipilih karena syarat-syarat yang harus dipenuhi suatu rangka tersebut. Struktur rangka akan mendapatkan beban dua dimensi atau bahkan tiga dimensi yang kompleks, dan sifat dasar struktur pada material konstruksi ditentukan pada spesimen sederhana yang dibebankan pada penarikan (torsion) dan tekanan (compression). Bahan konstruksi rangka yang dipilih disesuaikan dengan beban yang akan ditangguhkan terhadap suatu pembebanan, kondisi dari suatu fungsi struktur dan kemudahan untuk mendapatkan bahan konstruksi yang dibutuhkan.
Adapun bahan-bahan yang biasa digunakan untuk pembuatan rangka adalah baja, besi, kayu dan plastik. Umumnya material yang digunakan untuk membuat rangka memiliki berbagai bentuk seperti I-beam, Z bars, angle,
Gambar 8. Berbagai bentuk material dari baja yang digunakan untuk membuat rangka (Smith, 1964)
Angle I-beam Channel Z-bars
III. METODOLOGI PENELITIAN
A. TEMPAT DAN WAKTU PELAKSANAAN PENELITIAN
Penelitian ini dilaksanakan pada bulan April 2005 sampai dengan bulan September 2005. Modifikasi instrumen pengukur gaya tarik (pull) dan kecepatan maju traktor dilakukan di Laboratorium Alat dan Mesin Budidaya Pertanian (lab. TMBP) serta Laboratorium Instrumentasi dan Kontrol (Bagian Ergotronika), Uji fungsional (uji lapang) dilakukan pada lahan rumput di lahan percobaan Laboratorium Alat dan Mesin Budidaya Pertanian (lab. TMBP), Departemen Teknik Pertanian, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
B. ALAT DAN BAHAN
1. Pembuatan instrumen
Peralatan dan bahan-bahan yang akan digunakan dalam pembuatan instrumen ini adalah:
a. Instrumen pengukur gaya tarik (pull) traktor roda 2.
Silinder penggulung kawat dengan diameter luar 32 cm
Roda sepeda dengan ukuran 20”
Load cell (Kyowa LT-5TSA71C (1µε = 2 kgf))
Handy strain meter
Kawat sling
Bantalan (Bearing)
Baut dan mur
Besi siku
Besi kotak pejal
Peralatan bengkel
b. Instrumen pengukur kecepatan maju traktor
Sensor Photo interuptor DAC 0808
IC 7493, 7475, 324, 556
Komponen elektronik (potensio, capasitor, resistor, dan lain-lain)
Kabel
Solder
Oscilloscope
Power supply
2. Kalibrasi Instrumen
Motor listrik variabel
Beban mati 3. Uji fungsional
Traktor roda 2
Lahan pengujian
Patok
Stopwatch
Meteran
C. TAHAPAN PENELITIAN
Tahapan penelitian yang dilakukan mengikuti proses perancangan suatu produk yang ditunjukkan pada gambar 9, tahapan penelitian yang dilakukan meliputi :
1. Analisis masalah
Untuk menentukan tenaga tarik traktor dibutuhkan nilai gaya tarik
(pull) dan kecepatan maju traktor tersebut. Dalam uji performansi traktor untuk menentukan tenaga tarik dibutuhkan sedikitnya 4 orang pekerja untuk mengukur gaya tarik dan kecepatan maju traktor uji. Biaya bahan bakar traktor (traktor uji dan traktor beban) dan uang makan pekerja dalam sekali pengujian kurang lebih membutuhkan Rp 300.000.
Kecepatan maju traktor umumnya diukur dengan menggunakan metode sederhana yaitu dengan mengukur waktu tempuh traktor uji untuk menempuh jarak tertentu (10 m). Dengan menggunakan metode ini, dibutuhkan beberapa orang untuk mencatat waktu dan mengukur jarak tempuh traktor tersebut sehingga membutuhkan tenaga kerja yang banyak.
Perancangan instrumen pengukur gaya tarik dan kecepatan maju traktor dimaksudkan untuk mengurangi masalah-masalah seperti yang telah disebutkan diatas seperti biaya bahan bakar, biaya tenaga kerja dan efisiensi waktu pengujian.
Gambar 9. Tahapan penelitian Mulai Analisis masalah Perancangan k Konstruksi instrumen Pengujian Dokumentasi Selesai
Metode pengukuran tenaga tarik traktor yang tidak effisien :
1.Jumlah tenaga kerja banyak 2.Membutuhkan biaya lebih besar
3.Lahan percobaan yang dibutuhkan besar/luas
Instrumen sederhana untuk menentukan tenaga tarik traktor, terdiri dari :
1.Instrumen pengukur gaya tarik traktor 2.Instrumen pengukur kecepatan maju traktor
• Instrumen pengukur gaya tarik traktor -rangka -sistem pembebanan -sensor (Loadcell) -drum penggulung kawat
• Instrumen pengukur kecepatan maju traktor -sensor photo interuptor -AVO meter -rangkaian tambahan -piringan bercelah
• Photo
• Gambar Teknik
• Data-data pengujian
• Laporan penelitian (skripsi)
• Slip Roda traksi
• Gaya tarik (pull) traktor uji
2. Perancangan konsep
Instrumen ini dibuat untuk mengukur gaya tarik (pull) traktor dan kecepatan maju traktor. Dengan mengetahui nilai gaya tarik (pull) dan kecepatan majunya maka nilai tenaga tarik (drawbar power) dapat dicari dengan menggunakan persamaan 3.
Gaya tarik (pull) diukur dengan menggunakan Loadcell yang dipasang pada rangka. Loadcell yang digunakan memiliki sensor strain gauge untuk mendeteksi gaya tarik (pull), keluaran berupa regangan dari
strain gauge diperagakan oleh Handy strain meter dalam satuan mikro
strain (mε).
Instrumen pengukur kecepatan maju, dirancang untuk mengukur kecepatan putar drum penggulung kawat sling. Drum tersebut berputar karena adanya tarikan dari traktor yang diuji, kecepatan maju traktor uji didapatkan dengan mengubah kecepatan putar drum penggulung kawat menjadi kecepatan linier. Instrumen pengukur kecepatan maju menggunakan sebuah sensor cahaya photo interuptor dan rangkaian tambahan untuk mengolah sinyal keluaran dari sensor dan menampilkan keluaran dalam bentuk digital maupun analog. Keluaran dari sensor akan diperagakan dengan menggunakan AVO meter digital, keluaran berupa tegangan listrik dalam satuan volt (V).
3. Konstruksi instrumen
Instrumen pengukuran yang akan dirancang yaitu, instrumen pengukur gaya tarik (pull) dan instrumen pengukur kecepatan maju traktor roda 2, proses perancangan dapat dilihat pada gambar 10.
a. Instrumen pengukur gaya tarik (pull)
Pembuatan dan perakitan instrumen pengukur gaya tarik (pull)
Gambar 10. Proses konstruksi instrumen
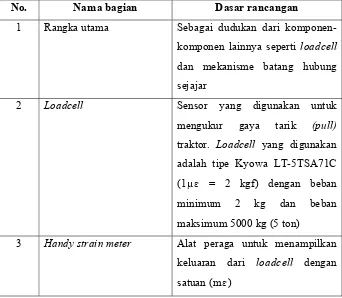
Tabel 3. Bagian - bagian dari instrumen pengukur gaya tarik (pull)
No. Nama bagian Dasar rancangan
1 Rangka utama Sebagai dudukan dari komponen-komponen lainnya seperti loadcell
dan mekanisme batang hubung sejajar
2 Loadcell Sensor yang digunakan untuk
mengukur gaya tarik (pull)
traktor. Loadcell yang digunakan adalah tipe Kyowa LT-5TSA71C (1µε = 2 kgf) dengan beban minimum 2 kg dan beban maksimum 5000 kg (5 ton)
3 Handy strain meter Alat peraga untuk menampilkan
keluaran dari loadcell dengan satuan (mε)
Mulai
Instrumen pengukur kecepatan maju Instrumen
pengukur gaya tarik (pull)
Piringan bercelah Rangka
Loadcell dan handy strain
Sensor photo interuptor
Rangkaian tambahan perangkaian
Pengumpulan alat dan bahan
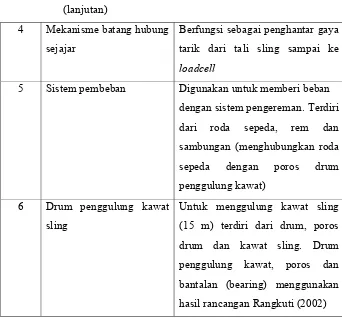
[image:30.612.166.508.403.701.2]Tabel 3. Bagian - bagian dari instrumen pengukur gaya tarik (pull)
(lanjutan)
4 Mekanisme batang hubung sejajar
Berfungsi sebagai penghantar gaya tarik dari tali sling sampai ke
loadcell
5 Sistem pembeban Digunakan untuk memberi beban dengan sistem pengereman. Terdiri dari roda sepeda, rem dan sambungan (menghubungkan roda sepeda dengan poros drum penggulung kawat)
6 Drum penggulung kawat sling
Untuk menggulung kawat sling (15 m) terdiri dari drum, poros drum dan kawat sling. Drum penggulung kawat, poros dan bantalan (bearing) menggunakan hasil rancangan Rangkuti (2002)
b. Instrumen pengukur kecepatan maju
Instrumen pengukur kecepatan maju yang dibuat menggunakan sensor photo interruptor (gambar 11)serta piringan bercelah dari PCB sebagai perlakuan bagi sensordan rangkaian tambahan yang berfungsi mengolah keluaran dari sensor menjadi sinyal yang diinginkan. Rangkaian tambahan menggunakan komponen utama yaitu berbagai jenis IC yang diperlukan dan komponen lain seperti resistor, capasitor dan lain-lain. Keluaran dari Instrumen pengukur kecepatan maju diperagakan dengan menggunakan AVO meter digital tipe DT-830B.
Gambar 11. Kombinasi emmiter - penyensor, (a) Photo interuptor; (b)
reflektor (Woollard, Barry G)
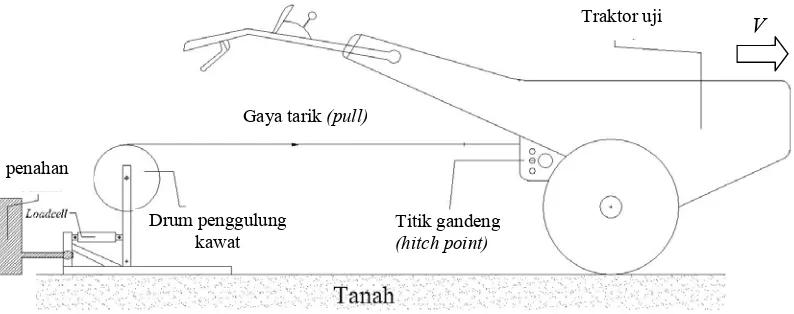
4. Pengujian
Pengujian terhadap rancangan dilakukan setelah instrumen pengukur telah selesai dibuat, terdiri dari kalibrasi dan uji fungsional. Uji fungsional dilakukan untuk melihat kinerja dari kedua instrumen, yaitu instrumen pengukur kecepatan maju dan instrumen pengukur beban tarik. Skema pengujian ditampilkan pada gambar 12.
Gambar 12. Skema pengujian Receiver
Transmitter
Traktor uji
Titik gandeng (hitch point)
Gaya tarik (pull)
Drum penggulung kawat penahan
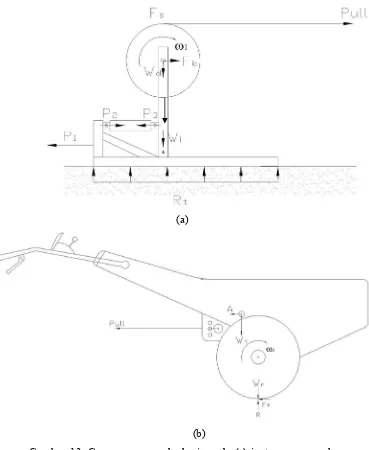
[image:32.612.145.542.495.652.2]
(a)
[image:33.612.137.506.75.525.2](b)
Gambar 13. Gaya-gaya yang berkerja pada (a) instrumen pengukur gaya tarik (pull) dan (b) traktor uji
Pada pengujian kedua instrumen tersebut, diasumsikan gesekan yang terjadi antara tali sling dengan drum penggulung kawat sling dan tegangan yang terjadi pada rangka serta penahan instrumen pengukur gaya tarik supaya tidak tertarik oleh traktor uji tidak mempengaruhi gaya tarik
traktor uji dapat dilihat pada gambar 13, sedangkan pada gambar 14 ditampilkan diagram metode pengujian instrumen pengukur kecepatan maju dan gaya tarik (pull) traktor roda 2.
Gambar 14. Diagram metode pengujian instrumen pengukur kecepatan maju dan gaya tarik (pull) traktor roda 2
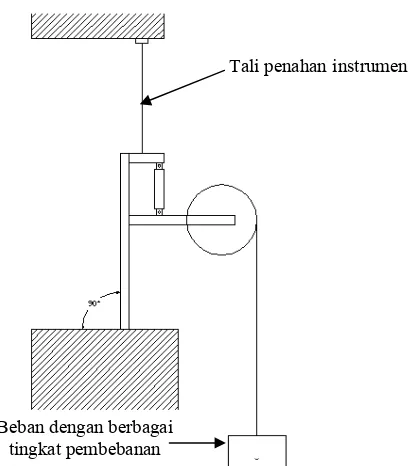
a. Kalibrasi instrumen pengukur gaya tarik (pull)
Sebelum dilakukan pengujian di lapangan, instrumen pengukur gaya tarik (pull). Kalibrasi ini dilakukan untuk mendapatkan hubungan antara gaya tarik (pull) dengan regangan yang terukur oleh loadcell. Metode kalibrasi untuk instrumen pengukur gaya tarik (pull) adalah dengan membalikkan instrumen seperti terlihat pada gambar 15. Pada saat kalibrasi dilakukan drum penggulung kawat ditahan oleh penahan
mulai
kalibrasi Instrumen pengukur
gaya tarik (pull)
kalibrasi Instrumen pengukur
kecepatan maju
Uji lapang
Slip roda Kecepatan maju traktor uji
Gaya tarik (pull)
traktor uji
Pengolahan data
Kesimpulan dari uji fungsional
Selesai
(besi pipa) sehingga poros silinder penggulung kawat tidak berputar (diam), kemudian beban mati diberikan pada ujung kawat sling.
Gambar 15. Skema kalibrasi instrumen pengukur gaya tarik (pull)
Pada saat kalibrasi, kawat diberikan beban mati dari tingkat beban terkecil sampai dengan tingkat beban terbesar. Setelah itu kalibrasi diulangi dengan cara yang sama tetapi dimulai dari tingkat beban terbesar ke tingkat beban terkecil. Beban yang digunakan dalam kalibrasi terdiri dari 5 tingkat beban, yaitu 20 kg, 40.2 kg, 49.7 kg, 79.78 kg, dan 99.86 kg. Dengan adanya beban yang diberikan maka
loadcell akan tertarik dan menyebabkan sensor (strain gauge) yang
terdapat didalamnya akan meregang. Regangan yang terjadi pada sensor dapat dibaca dengan menggunakan handy strain meter.
Data yang didapat dari kalibrasi, kemudian diproses untuk mendapatkan hubungan antara regangan yang pada loadcell dengan tingkat beban pada proses kalibrasi untuk mendapatkan nilai gaya tarik
(pull) pada ujperformansi traktor roda 2.
b. Kalibrasi Instrumen Pengukur Kecepatan Maju Traktor
Kalibrasi dilakukan dengan mengunakan putaran dari poros motor listrik yang berbeda-beda, yaitu 25 rpm sampai dengan 100 rpm
Tali penahaninstrumen
dan sebaliknya. Putaran (rpm) dari motor listrik tersebut dapat diketahui dengan mengukur jumlah putaran poros motor listrik dan waktunya untuk melakukan jumlah putaran tersebut atau dengan menggunakan thachometer untuk mengukur kecepatan putar motor listrik tersebut. Keluaran dari sensor kecepatan putar berupa tegangan (V) akan terbaca pada AVO meter. Dari kalibrasi ini akan diperoleh hubungan antara kecepatan putar dengan tegangan keluaran dari sensor. Skema kalibrasi instrumen pengukur kecepatan maju dapat dilihat pada gambar 16.
Gambar 16. Skema kalibrasi instrumen pengukur kecepatan maju c. Uji fungsional
Pengujian dilakukan pada lahan rumput di Laboratorium Alat dan Mesin Budidaya Pertanian (lab. TMBP). Metode pengujian yang dilakukan adalah metode uji fungsional. Pengujian ini bertujuan untuk melihat apakah semua mekanisme yang bekerja pada kedua instrumen dapat berjalan sesuai dengan rancangan, jika terdapat kekurangan-kekurangan pada kedua instrumen tersebut maka akan dimasukan sebagai saran kedalam skripsi penelitian.
1) Uji fungsional instrumen pengukur gaya tarik (pull)
Pada uji fungsional instrumen pengukur gaya tarik (pull),
yang perlu untuk diperhatikan adalah mekanisme penyaluran daya Catu daya
Piringan bercelah Motor listrik variabel
Rangkaian tambahan AVO meter digital
Sensor photo
dari kawat sling menuju loadcell apakah telah berjalan sesuai dengan rancangan yang diinginkan. Kemudian, perlu diperhatikan apakah sistem pengereman sudah berfungsi dengan baik, sehingga dapat memberikan beban tarik yang cukup untuk digunakan dalam mengukur gaya tarik traktor. Dan, perlu juga diperhatikan kondisi rangka secara keseluruhan terutama pada sambungan yang menggunakan baut dan mur apakah dapat menahan gaya tarik
(pull) dari traktor.
Pada uji fungsional instrumen pengukur gaya tarik (pull)
traktor, dilakukan pengukuran gaya tarik traktor pada tingkat kecepatan putar mesin yang sama dengan beban tarik yang berbeda-beda. Tujuan dari pengujian ini adalah untuk melihat kinerja dari instrumen tersebut, yaitu mengukur gaya tarik (pull)
dari traktor roda 2.
2) Uji fungsional instrumen pengukur kecepatan maju
Uji fungsional instrumen pengukur kecepatan maju traktor roda 2 dilakukan untuk melihat kinerja dari sensor dan piringan bercelah dalam menghasilkan pulsa sebagai input untuk rangkaian tambahan. Uji fungsional yang dilakukan juga meliputi pengukuran kecepatan maju traktor roda dua pada beban tarik yang berbeda-beda. Tujuan dari pengujian ini secara keseluruhan adalah melihat kinerja dari instrumen pengukur kecepatan maju untuk mengukur kecepatan maju traktor roda 2.
Pengujian ini dilakukan bersama-sama dengan pengujian instrumen pengukur gaya tarik (pull) dengan tujuan mendapatkan nilai gaya tarik (pull) dan kecepatan maju trator roda 2 pada berbagai tingkat beban tarik untuk mendapatkan tenaga tarik dari traktor tersebut.
3) Prosedur pengujian
1. Persiapkan kedua instrumen pengukur gaya tarik (pull) dan kecepatan maju.
2. Buat jarak lintasan sepanjang 10 m. Tempatkan patok setiap interval 2 m dari titik awal sampai titik akhir lintasan tersebut. 3. Hidupkan traktor penarik. Kemudian tentukan kecepatan putar
mesin traktor pada 2500 rpm dengan menarik tuas gas .
4. Sambungkan tali sling dari instrumen pengukur gaya tarik
(pull) dengan traktor uji dan atur beban tarik pada instrumen dengan memutar tuas pengereman.
5. Traktor penarik digerakkan maju dengan menggunakan perseneling L-1, ukur dan catat waktu yang diperlukan untuk menempuh jarak 10 m dengan menggunakan stopwatch.
6. Ukur dan catat jarak tempuh 5 putaran roda untuk mendapatkan slip roda traksi.
7. Selama proses penarikan, catat 7 data pengukuran yang ditunjukkan oleh handy strain meter dan AVO meter pada jarak yang telah ditentukan.
8. Pengukuran dilakukan pada beberapa tingkat beban tarik. 9. Dari data-data yang didapat tentukan kecepatan maju rata-rata,
gaya tarik (pull) rata-rata, slip roda traksi dan tenaga tarik
(drawbar power).
10. Buat kurva hubungan antara kecepatan maju traktor-gaya tarik
(pull), kecepatan maju traktor–slip roda dan gaya tarik (pull) -tenaga tarik (drawbar power).
e) Dokumentasi
Selama penelitian dilakukan, banyak dokumen-dokumen penelitian yang dihasilkan seperti gambar sketsa maupun gambar teknik yang dihasilkan selama perancangan konsep. Gambar-gambar yang dihasilkan selama perancangan konsep akan diubah menjadi gambar-gambar detail dan mencakup keseluruhan instrumen yang telah dirancang. Gambar-gambar ini akan berguna sebagai informasi maupun panduan, jika instrumen atau komponennya akan diperbaiki (modifikasi) maupun dibuat ulang.
Selain gambar-gambar teknik juga dihasilkan foto-foto selama penelitian. Foto-foto yang dihasilkan diambil selama proses pembuatan sampai dilakukan uji fungsional terhadap kedua instrumen tersebut. Selain sebagai dokumentasi foto-foto ini juga sebagai bukti bahwa instrumen ini telah dibuat, dikalibrasi dan telah dilakukan pengujian terhadap kedua instrumen tersebut.
IV.
ANALISIS RANCANGAN DAN KONSTRUKSI ALAT
A. INSTRUMEN PENGUKUR GAYA TARIK (PULL)
Bagian-bagian utama instrumen pengukur gaya tarik (pull) adalah : a. Rangka utama
Rangka utama dibuat dengan menggunakan besi siku dan besi kotak berlubang (gambar 17) dengan ukuran 4 cm x 4 cm dan tebal 0.3 cm serta besi plat dengan ukuran 3 cm x 0.4 cm.
(a) Besi siku (angle)
(b) Besi kotak pejal (hollow square)
Gambar 17. Material untuk membuat rangka (a) besi siku (angle), (b) besi kotak pejal (hollow square)
b. Mekanisme batang hubung sejajar
Mekanisme batang hubung sejajar berfungsi sebagai dudukan drum penggulung kawat dan loadcell, serta meneruskan gaya dari traktor ke load cell. Batang hubung terbuat dari besi siku dan besi kotak berlubang dengan ukuran 4 cm x 4 cm dan tebal 0.3 cm serta besi plat dengan ukuran 3 cm x 0.4 cm. Gaya tarik (pull) dapat dicari dengan menggunakan rumus :
ld pull ls
fs× = × ... (6) di mana : fs = strain yang terbaca oleh sensor (mε)
Ls = jarak sensor-titik vipot Pull = tarikan traktor
c. Sistem pembebanan
Untuk memberi beban digunakan roda sepeda dan sistem pengeremannya. Sistem pembebanan ini berfungsi sebagai beban tarik bagi traktor yang diuji. Pada roda sepeda diberi tambahan berupa sambungan yang terbuat dari besi bubutan untuk menyambungkan roda sepeda dengan poros drum penggulung kawat. Gambar teknik sistem pembebanan dapat dilihat pada lampiran 1.
d. Drum penggulung kawat sling
[image:41.612.290.380.363.485.2]Karena kawat sling yang digunakan sepanjang 15 m dengan diameter kawat 6 mm maka drum penggulung kawat dirancang dengan menggunakan pipa besi dengan diameter 32 cm, lebar 18 cm dengan tebal 5 mm dapat dilihat pada gambar 18. Sedangkan rangka penggulung kawat dibuat dari besi plat berdiameter 31 cm dan tebal 5 mm. Gambar teknik drum penggulung kawat sling dapat dilihat pada lampiran 2.
Gambar 18. Drum penggulung kawat sling e. Poros drum penggulung kawat
Poros yang digunakan adalah poros yang telah dibuat oleh Rizal Rangkuti (2002), poros drum penggulung kawat yang digunakan berdiameter 25 mm.
Menurut Sularso dan K. Suga (1997) dalam Rangkuti (2002), untuk menghitung besarnya diameter poros yang digunakan adalah dengan menentukan daya rencana Pd (kW) dengan rumus :
P fc
P = Daya nominal out put dari motor penggerak (kW). fc = Faktor koreksi diambil dari tabel faktor koreksi daya
(tabel 4).
Tabel 4. Faktor-faktor koreksi daya yang akan ditransmisikan, (fc)
(Sularso dan K. Suga,1997)
Daya yang akan ditransmisikan fc
Daya rata-rata yang diperlukan 1.2 – 2.0 Daya maksimum yang diperlukan 0.8 – 1.2
Daya normal 1.0 – 1.5
Untuk mengetahui momen puntir atau disebut juga momen rencana (T) dapat digunakan persamaan sebagai berikut:
102 ) 60 / 2 )( 1000 /
(T n1
Pd= π ... (8) sehingga : 1 5 10 74 . 9 n Pd
T = × (kg.mm) ... (9) di mana : T = Momen rencana (kg.mm)
n1 = Putaran poros (rpm)
Besarnya tegangan geser yang diijinkan (τa) dapat dihitung dengan
persamaan : ) /(sf1 sf2
b
a =τ ×
τ ... (10) di mana : τa = Tegangan geser yang diijinkan (kg.mm)
τb = Kekuatan tarik (kg/mm2)
sf1 = Faktor keamanan dari faktor kelelahan puntir,
harga 5.6bahan SF dan 6.0 bahan S-C
sf2 = Faktor bentuk fisik karena pengaruh konsentrasi
tegangandan kekasaran permukaan dengan harga 1.3 sampai 3.0
3 / 1 1 . 5 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡
= K C T
d t b
a
s τ ... (11)
di mana : ds = Diameter poros (mm)
Kt = Faktor keamanan oleh pengaruh keadaan momen
puntir,besarnya antara 1.0 sampai 3.0
Cb = Faktor pengaruh beban adanya beban lentur oleh transmisi lain, besarnya antar 1.2 sampai 2.3, bila tidak ada, Cb = 0
Menurut Triratanasirichai (1991) dalam Rangkuti (2002) gaya tarik maksimum traktor pada lahan sawah sebesar 400 N dan torsi maksimum yang terjadi pada poros drum penggulung kawat sebesar 64 Nm. Maka berdasarkan keterangan besarnya torsi diatas, dapat diasumsikan bahwa T (momen rencana) yang terjadi pada poros sebesar 64 Nm atau 12755.1 kg mm.
Diasumsikan bahan poros yang dipakai adalah baja difinis dingin (S35C-D) dengan alasan poros dapat dibubut, digerinda dan berbagai perlakuan lainnya. Bahan ini memiliki kekuatan tarik
τ
b = 53 kg/mm2,dengan Sf1 = 6 dan Sf2 = 1.4, sehingga tegangan geser (
τ
a) yang diijinkan:2 / 4 . 8 4 . 1 6 53 mm kg x
a = =
τ
Faktor koreksi untuk momen puntir adalah Kt = 1 dan beban dikenakan secara halus dengan faktor lenturan adalah Cb = 2. Dari nilai-nilai tersebut diameter poros dapat ditentukan:
ds =
3 1 6 . 6530 2 1 4 . 8 1 . 5 ⎥⎦ ⎤ ⎢⎣
⎡ x x x
= 19.94 mm ≈ 20 mm atau 2 cm
B. INSTRUMEN PENGUKUR KECEPATAN MAJU
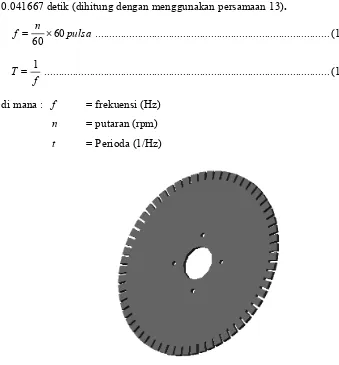
Pada instrumen ini digunakan piringan bercelah hasil rancangan Rizal Rangkuti (2002) berbentuk lingkaran berdiameter 17 cm dengan 60 buah celah (gambar 19). Piringan bercelah yang berputar memungkinkan adanya radiasi inframerah sebanyak 60 kali yang berarti dalam satu kali putaran akan menghasilkan pulsa sebanyak 60 pulsa (60 pulsa/putaran).
Tujuan dibuat celah sebanyak 60 buah pada piringan untuk memudahkan perhitungan jumlah pulsa yang dihasilkan pada tiap kecepatan putar. Jika piringan menghasilkan 60 pulsa/putaran, maka pada kecepatan 24 rpm frekuensi pulsa yang dihasilkan adalah sebanyak 24 Hz (pulsa/ detik) (dihitung dengan menggunakan persamaan 12) dan periode (T) sebesar 0.041667 detik (dihitung dengan menggunakan persamaan 13).
pulsa n
f 60
60×
= ... (12)
f
T = 1 ... (13)
di mana : f = frekuensi (Hz)
n = putaran (rpm)
[image:44.612.148.487.295.660.2]t = Perioda (1/Hz)
Kecepatan maju traktor dapat dihitung dengan mengetahui kecepatan putar drum penggulung kawat sling, dengan menggunakan rumus sebagai berikut :
v=(2πRd×ω)/60 ... (14) di mana : v = kecepatan maju traktor roda 2
Rd = jari-jari drum penggulung kawat (0.16 m)
V.
HASIL DAN PEMBAHASAN
A. INSTRUMEN PENGUKUR GAYA TARIK
a) Pembuatan instrumen pengukur gaya tarik (pull) traktor roda 2
Hasil perancangan instrumen pengukur gaya tarik (pull) traktor roda 2, memiliki bagian utama, yaitu : a) rangka utama, b) sensor
(loadcell), c) drum penggulung kawat sling, d). mekanisme batang
hubung, dan e) sistem pembebanan (pengereman). Gambar teknis instrumen pengukur gaya tarik (pull) traktor roda 2 dapat dilihat pada lampiran 3.
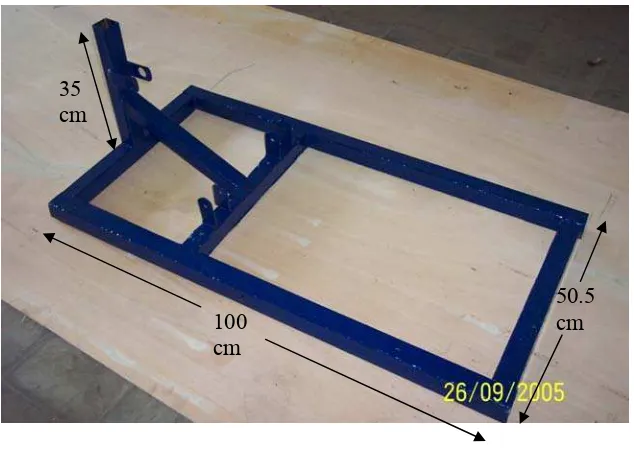
0. Rangka utama
[image:46.612.186.503.393.618.2]Rangka utama dibuat dengan menggunakan besi siku dan besi kotak pejal dengan ukuran 4 cm x 4 cm dan tebal 0.3 cm serta besi plat dengan ukuran 3 cm x 0.4 cm. Gambar rangka utama dapat dilihat pada gambar 20.
Gambar 20. Rangka utama
Penyambungan rangka dilakukan dengan cara pengelasan. Bahan yang digunakan untuk membuat rangka dasar yaitu besi siku yang kemudian dilas sehingga membentuk besi kotak pejal.
100 cm
50.5 cm 35
1. Loadcell
Loadcell berfungsi sebagai sensor mendeteksi gaya tarik (pull)
dari traktor. Loadcell yang digunakan adalah tipe Kyowa LT-5TSA71C (1µε = 2 kgf) dengan beban minimum 2 kg dan beban maksimum 5000 kg (5 ton). Handy strain meter digunakan untuk menampilkan keluaran dari loadcell, untuk menyambungkan handy strain meter dengan
loadcell digunakan kabel data (bride box).
Untuk menghubungkan loadcell dengan rangka utama dan mekanisme batang hubung digunakan baut dan mur. Gambar loadcell
dapat dilihat pada gambar 21.
Gambar 21. Sensor pengukur gaya tarik 2. Drum penggulung kawat sling
Drum penggulung kawat sling digunakan untuk menggulung kawat sling. Karena kawat sling yang digunakan sepanjang 15 m dengan diameter kawat 6 mm, maka drum penggulung kawat dirancang dengan menggunakan pipa besi dengan diameter 32 cm, lebar 18 cm dengan tebal 5 mm. Sedangkan rangka penggulung kawat dibuat dari besi plat berdiameter 31 cm dan tebal 5 mm dapat dilihat pada gambar 22.
dipasang pada bagian atas batang hubung dengan menggunakan baut dan mur.
Gambar 22. Drum penggulung kawat 3. Mekanisme batang hubung
Mekanisme batang hubung berfungsi sebagai dudukan drum penggulung kawat dan loadcell serta meneruskan gaya dari traktor ke
loadcell. Batang hubung terbuat dari besi siku dan besi kotak pejal
dengan ukuran 4 cm x 4 cm dan tebal 0.3 cm serta besi plat dengan ukuran 3 cm x 0.4 cm. Gambar mekanisme batang hubung dapat dilihat pada gambar 23. Untuk menghubungkan mekanisme ini dengan rangka utama digunakan baut dan mur, titik pusat gerakan (pivot) mekanisme batang hubung terdapat pada titik penyambungan ini.
Poros Drum penggulung
kawat sling Kawat sling (15 m)
[image:48.612.196.488.127.293.2]4. Sistem pembebanan (pengereman)
Sistem pengereman ini berfungsi sebagai pemberi beban. Sistem pemberi beban ini terdiri dari ban sepeda dengan diameter 52 cm dan besi bubut, dimana besi bubut berfungsi untuk menghubungkan ban sepeda dengan poros drum penggulung kawat sling. Penghubung ini dilas dengan roda sepeda dan kemudian dibaut dengan poros drum penggulung kawat. Gambar sistem pembebanan (pengereman) dapat dilihat pada gambar 24, dimana digunakan ulir pada tuas pengatur tingkat pembebanan yang menggerakkan rem untuk menekan roda sepeda sehingga terjadi efek pengereman.
[image:49.612.276.475.274.459.2]
Gambar 24. Sistem pembebanan (pengereman) b) Kalibrasi instrumen pengukur gaya tarik traktor roda 2 (pull)
Sebelum instrumen pengukur gaya tarik (pull) traktor roda 2 digunakan perlu dilakukan kalibrasi terlebih dahulu. Kalibrasi dilakukan untuk mendapatkan karakteristik sensor dengan cara memberi beban. Beban yang digunakan dalam kalibrasi terdiri dari 5 tingkat beban, yaitu 20 kg, 40.2 kg, 49.7 kg, 79.78 kg, dan 99.86 kg. Proses kalibrasi instrumen pengukur gaya tarik (pull) traktor roda 2 dapat dilihat pada gambar 25.
Pada saat kalibrasi dilakukan terjadi kesulitan karena alat yang dikalibrasi sulit untuk ditempatkan pada posisi yang diinginkan. Hal ini dapat diatasi dengan memberi penahan berupa kawat sling dan tali
Tuas pengatur tingkat pembebanan
tambang sehingga alat tetap pada posisinya. Data hasil kalibrasi instrumen pengukur gaya tarik (pull) traktor roda 2 dapat dilihat pada lampiran 4.
Gambar 25. Kalibrasi instrumen pengukur gaya tarik (pull)
Berdasarkan hasil kalibrasi alat maka didapat persamaan kalibrasi yaitu, Y=0.4589x+0.1544 dimana Y adalah beban (kg) dan X adalah regangan loadcell (mε) dengan R2=0.9993. Nilai R2 yang didapat sebesar 0.9993, sehingga persamaan yang didapat dalam proses kalibrasi dapat digunakan untuk mencari gaya tarik (pull) dalam satuan Newton (N), dengan cara mengalikan beban (kg) yang digunakan pada saat kalibrasi dengan gaya gravitasi (kg/cm2) (persamaan 15).
g m
F = × ...(15) Dimana : F = gaya (N)
m = massa beban (kg)
G = percepatan gravitasi (m/s2)
Grafik hubungan antara regangan loadcell (mε) dengan beban mati (kg) ditunjukkan pada gambar 26.
Handystrain meter
Loadcell
Gambar 26. Grafik hubungan antara regangan loadcell (mε) dengan beban mati (kg)
B. INSTRUMEN PENGUKUR KECEPATAN MAJU
a) Pembuatan instrumen pengukur kecepatan maju
Instrumen pengukur kecepatan ini berfungsi untuk mengukur kecepatan maju traktor roda 2 pada uji performansi. Instrumen ini terdiri dari sensor cahaya yaitu photo interuptor, piringan bercelah dan rangkaian tambahan. Skema perangkaian instrumen pengukur kecepatan maju traktor roda 2 dapat dilihat pada lampiran 5.
1. Sensor cahaya (photo interuptor)
Sensor cahaya terdiri dari 2 bagian yaitu emitter dan photo dioda. Gambar sensor cahaya dapat dilihat pada gambar 27. Jika sinar inframerah yang dihasilkan oleh emitter melalui celah pada piringan maka photo dioda akan memiliki tegangan bias maju yang sangat kecil tetapi sebaliknya jika sinar inframerah terhalang maka tegangan bias maju pada photo dioda akan menjadi lebih besar. Piringan bercelah yang berputar memungkinkan adanya kondisi gelap-terang dengan frekuensi sesuai dengan jumlah celah yang terdapat pada piringan tersebut. Skema perangkaian sensor photo interuptor dapat dilihat pada lampiran 6.
y = 0,4589x + 0,1544 R2 = 0,9993
0 20 40 60 80 100 120
0 50 100 150 200 250
Regangan Loadcell (mε)
as
Be
ba
n (kg
Gambar 27. Sensor cahaya (photo interuptor)
2. Piringan bercelah
Piringan bercelah berbentuk lingkaran diameter 17 cm dengan 60 buah celah. Bahan yang digunakan untuk membuat piringan bercelah yaitu PCB. Piringan bercelah yang berputar memungkinkan adanya radiasi inframerah sebanyak 60 kali yang berarti dalam satu kali putaran akan menghasilkan pulsa sebesar 60 pulsa (60 pulsa/putaran) dapat dilihat pada gambar 28.
Gambar 28. Piringan bercelah yang terbuat dari PCB
[image:52.612.248.434.395.543.2]Astabil
Monostabil
Ta Tb
reset pengunci Periode pengunci Penyaluran dari input ke output
Periode reset Menghitung pulsa
T 3. Rangkaian tambahan
Pada instrumen pengukur kecepatan maju traktor roda 2 digunakan rangkaian tambahan yang berfungsi untuk mengubah sinyal analog dari sensor menjadi sinyal digital. Rangkaian ini terdiri dari berbagai komponen terutama IC 556, 7493, 7475 dan DAC 0808 (gambar 29). Skema perangkaian rangkaian tambahan dapat dilihat pada lampiran 8.
(a) (b)
Gambar 29. (a) Pengecekan timer pada rangkaian tambahan, (b) rangkaian tambahan
Keluaran berupa sinyal digital akan berguna jika keluaran dari instrumen dibaca atau direkam oleh komputer yang telah dilengkapi dengan software berupa program komputer untuk membaca/merekam keluaran dari sensor. Pada gambar 30 dapat dilihat keluaran pulsa dari
timer pada rangkaian tambahan. Perangkaian timer pada rangkaian
tambahan dapat dilihat pada lampiran 9.
4. Alat peraga
[image:54.612.261.400.200.350.2]Untuk menampilkan keluaran berupa tegangan (V) dari instrumen pengukur kecepatan maju digunakan sebuah AVO meter sebagai peraga. AVO meter yang digunakan diset dengan keluaran maksimal 20 V. AVO meter yang digunakan dalam penelitian ini yaitu AVO meter digital. Gambar AVO meter dapat dilihat pada gambar 31.
Gambar 31. AVO meter digital
b) Kalibrasi instrumen pengukur kecepatan maju traktor roda 2
Kalibrasi instrumen pengukur kecepatan maju traktor roda 2 dilakukan dengan menggunakan motor listrik yang dapat diubah putarannya seperti terlihat pada gambar 32.
Gambar 32. Peralatan yang digunakan pada saat kalibrasi instrumen Piringan bercelah
Rangkaian tambahan
Thaco meter
Motor listrik variable
[image:54.612.210.451.439.675.2]Kalibrasi dilakukan dengan menyiapkan peralatan yang dibutuhkan dan instrumen pengukur kecepatan maju. Putaran motor listrik yang digunakan dimulai dari putaran motor listrik yang terkecil yaitu 25 rpm sampai dengan 100 rpm dan sebaliknya. Berdasarkan hasil kalibrasi didapatkan hubungan antara kecepatan maju dengan tegangan keluaran dari instrumen dapat dilihat pada gambar 33. dengan persamaan Y= 40.141X-0.9608 dimana Y adalah Kecepatan putar (rpm) dan X adalah tegangan keluaran yang ditampilkan pada AVO meter (Volt) dengan R2=0.9959. Data-data kalibrasi sensor kecepatan maju dapat dilihat pada lampiran 10.
y = 40,141x - 0,9608 R2 = 0,9959
0 10 20 30 40 50 60 70 80 90 100 110
0 0,5 1 1,5 2 2,5 3
[image:55.612.175.493.262.463.2]Tegangan (V) K e cep at an P u tar ( rp m )
Gambar 33. Grafik hubungan antara kecepatan putar (rpm) dengan tegangan (V) keluaran dari instrumen pengukur kecepatan maju traktor roda 2 yang terbaca pada AVO meter
C. UJI FUNGSIONAL INSTRUMEN PENGUKUR GAYA TARIK (PULL) DAN INSTRUMEN PENGUKUR SENSOR KECEPATAN MAJU
a. Uji fungsional instrumen pengukur gaya tarik (pull).
Pengujian ini dilakukan untuk menentukan kemampuan instrumen pengukur gaya tarik (pull) yang telah dirancang. Pada saat dilakukan pengujian instrumen harus diletakkan sejajar dengan arah maju traktor roda 2. Instrumen ditahan oleh traktor roda 4 dengan cara mengikatnya pada balok besi yang dihubungkan ke lower link traktor Deutz dengan tujuan untuk menahan instrumen supaya tidak tertarik oleh traktor roda 2 (traktor uji) seperti terlihat pada gambar 34.
(a)
(b)
Gambar 34. (a) Instrumen diikatkan pada lower link traktor roda 4 pada saat pengujian di Leuwikopo; (b) Instrumen diikatkan pada roda trailer pada saat instrumen digunakan untuk pengujian roda besi di lahan sawah baru
Tali sling Traktor roda 4
trailer
[image:56.612.186.470.238.618.2]Beban tarik pada tiap tingkat pembebanan, diberikan dengan menetapkan titik awal pengereman dan kemudian memutar tuas pengereman dengan kenaikan 2 putaran tuas pengereman pada tiap tingkat pembebanan. Pada saat pengujian hanya dilakukan sebanyak 4 tingkat pembebanan karena dikhawatirkan jika lebih dari 4 tingkat pembebanan dengan kenaikan 2 putaran tuas pengereman maka roda sepeda akan bergesekan dengan rangka yang dapat mengakibatkan rusaknya ban sepeda.
Berdasarkan hasil uji fungsional, semua bagian dari instrumen pengukur gaya tarik (pull) traktor roda 2 sudah dapat berfungsi seperti yang diharapkan yaitu mengukur gaya tarik (pull) traktor roda 2. Rangka utama dapat menopang drum penggulung kawat sling, batang hubung dan
loadcell. Batang hubung juga mampu menahan berat dari drum
penggulung kawat sling dan tidak rusak akibat tarikan traktor.
Pada saat pengujian instrumen ini diikatkan pada traktor untuk menahan instrumen supaya tidak tertarik oleh traktor roda 2. Hal ini sangatlah berbeda dengan perancangan awal. Pada awalnya instrumen ini dirancang memiliki kaki yang ditancapkan pada tanah untuk menahan instrumen. Tetapi, dengan pertimbangan bahwa instrumen ini akan digunakan pada pengujian dilahan dengan kondisi tanah yang tidak stabil maka instrumen tidak diberi kaki penahan. Selain itu, jika instrumen diberi kaki penahan akan sangat berbahaya pada saat instrumen diangkut maupun pada saat digunakan untuk pengujian.
Pada saat instrumen pengukur gaya tarik digunakan di lahan sawah baru, terdapat permasalahan dimana gaya tarik yang dihasilkan traktor tidak horizontal melainkan miring membentuk sudut α yang disebabkan posisi instrumen lebih tinggi dari traktor uji, karena diletakkan pada pematang sawah seperti terlihat pada gambar 35. Untuk permasalahan ini gaya tarik (pull) horizontal dapat dicari dengan menggunakan rumus: α = tan-1 (Hd/Lg) ... (16)
Hd = jarak antara drawbar (titik gandeng) dengan puncak dari instrumen (tali sling)
Z = ketenggelaman roda
Htp = jarak antara dasar dengan titik gandeng traktor
Hi = tinggi instrumen
Lg = jarak pengambilan data
Besarnya gaya tarik horisontal dapat diperoleh dengan menggunakan rumus:
P h = pt cos α ... (18) di mana : ph = gaya tarik horisontal
Pt = gaya tarik yang terukur
α = Sudut antara horizontal dengan kawat sling
(a)
(b)
Gambar 35. (a) Gaya tarik pada instrumen tidak horizontal melainkan membentuk sudut dengan bidang horizontal, (b) Skema posisi
α
α
Garis horizontal
Penahan
Gaya tarik (pull)
Traktor uji
[image:58.612.135.570.270.650.2]Berdasarkan uji fungsional dan penggunaannya dalam pengujian roda besi bersirip yang dilakukan di lahan sawah baru. Terdapat beberapa kekurangan pada instrumen pengukur gaya tarik (pull) yaitu pada sistem pengereman. Pengereman yang dilakukan belum cukup maksimum untuk menghasilkan gaya tarik dan tenaga tarik yang maksimum. Bila tingkat pengereman ditingkatkan yaitu untuk memberi beban yang lebih besar maka, ban sepeda yang digunakan akan mengalami gesekan dengan rangka besi yang dapat mengakibatkan roda pengereman rusak (gambar 36). Selain itu, pengereman yang dilakukan dengan menekan roda dapat mengakibatkan tekanan angin pada ban sepeda dapat berkurang sehingga mempengaruhi nilai pengukuran gaya tarik maupun kecepatan maju traktor. Data pengukuran gaya tarik (pull) dengan menggunakan instrumen pengukur gaya tarik (pull) traktor roda 2 dapat dilihat pada tabel 5.
[image:59.612.183.468.337.471.2]Gambar 36. Sistem pengereman yang bergesekan dengan rangka
Tabel 5. Data pengukuran gaya tarik (pull) dengan menggunakan instrumen pengukur gaya tarik (pull) traktor roda 2
Tingkat beban
Keluaran dari Loadcell (mε ) Rata –rata keluaran dari Loadcell (mε )
Gaya tarik (pull) (N) Ulangan
1 2 3 4 5 6 7
1 20 19 15 28 17 17 15 17.57 80.54
12 11 17 23 17 17 18
2 29 31 30 22 31 23 22 25.86 117.80
21 26 30 13 24 35 25
3 37 40 28 33 24 26 38 31.36 142.53
40 29 32 25 33 25 29
4 39 38 35 44 50 49 48 46.57 210.96
39 43 54 44 59 51 59
Roda sepeda Tuas pengereman
Berdasarkan data pengujian yang ditampilkan pada tabel 5, kisaran gaya tarik yang didapat berkisar antara 80.54-210.96 N. Kisaran gaya tarik tersebut belum maksimum, disebabkan karena sistem pembebanan tidak memberikan beban yang cukup untuk mendapatkan gaya tarik maksimum dari traktor.
b. Uji Fungsional instrumen pengukur kecepatan maju traktor roda 2 Uji fungsional instrumen pengukur kecepatan maju traktor roda 2 dilakukan bersamaan dengan pengujian instrumen pengukur gaya tarik
(pull) yang dilakukan di laboratorium Teknik Mesin dan Budidaya
Pertanian Leuwikopo.
Sebelum memulai uji fungsional terlebih dahulu peralatan dan instrumen yang digunakan dipersiapkan (gambar 37). Piringan bercelah ditempatkan pada poros penggulung kawat sling dan sensor dipasangkan pada besi penahan sensor seperti terlihat pada gambar 38. Instrumen sendiri membutuhkan masukan catu daya sebesar 5 V, 9V, -12V. Alat peraga (AVO meter) disetel dengan keluaran maksimum sebesar 20 V.
[image:60.612.170.556.412.665.2]Gambar 37. Persiapan uji fungsional instrumen