UJI TAHANAN GERAK
MODEL PERAHU KATIR PALABUHANRATU
GALIH ARIEF SAKSONO
SKRIPSI
DEPARTEMEN PEMANFAATAN SUMBERDAYA PERIKANAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI
Dengan ini saya menyatakan bahwa skripsi dengan judul “Uji Tahanan Gerak Pada Model Perahu Katir Palabuhanratu” adalah karya sendiri dan belum pernah diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Bogor, Agustus 2009
Galih Arief Saksono
ABSTRAK
GALIH ARIEF SAKSONO. Uji Tahanan Gerak Model Perahu Katir Palabuhanratu. Dibimbing oleh BUDHI HASCARYO ISKANDAR.
Dalam pengopersiannya, kapal bergerak melalui media air karena adanya gaya dorong dari sistem penggerak kapal. Air memiliki pengaruh terhadap kapal karena akan memberikan gaya perlawanan (resistant force) dari pergerakan kapal yang disebut ship resistance. Bagian kapal yang tidak tercelup air juga akan mengalami tahanan yang berasal dari angin. Namun air memiliki pengaruh yang lebih signifikan terhadap pergerakan kapal karena tahanan dari air memiliki nilai yang lebih besar dibandingkan dari udara. Di Indonesia sebagian besar kapal perikanan dibangun secara tradisional yaitu terbuat dari kayu dan dibangun tanpa perencanaan gambar ataupun perhitungan secara matematis sehingga pembuatan kapal hanya berdasarkan pengetahuan turun-menurun. Oleh karena itu kapal-kapal tersebut belum diketahui parameter hidrostatisnya. Salah satu kapal tradisional yang banyak digunakan nelayan di Indonesia adalah perahu katir. Metode penangkapan yang besifat aktif menuntut perahu tesebut bergerak dengan kecepatan yang tinggi, namun pada umumnya nelayan tidak memperhatikan efisiensi dari pergerakan perahu dengan daya yang dihasilkan motor tempel. Efisiensi tersebut berkaitan erat dengan besarnya
ship resistance yang terjadi pada perahu saat melaju. Dengan gaya dorong yang sama, semakin besar tahanan yang dimiliki kapal maka kecepatan perahu akan berkurang. Pada dasarnya tahanan gerak perahu dapat diestimasi menggunakan suatu pendekatan analisis data hirdostatis yang diolah dengan model simulasi, namun pada akhirnya percobaan secara eksperimental juga diperlukan karena memiliki tingkat keakuratan data yang lebih tinggi. Berdasarkan hal tersebut, penelitian mengenai tahanan gerak perahu katir perlu dilakukan. Namun pada kenyataannya pengujian tahanan gerak menggunakan perahu dengan ukuran yang sebenarnya sulit dilakukan. Oleh sebab itu, model ikonik—suatu model perahu berukuran kecil yang memiliki skala terhadap perahu sebenarnya—diperlukan untuk dijadikan sebagai media uji. Penelitian ini bertujuan menghitung parameter hidrostatis dan menghitung tahanan gerak model perahu katir.
Penelitian ini bersifat eksperimental. Analisis data yang digunakan berupa
deskriptif-numerik meliputi: analisis rasio dimensi utama, analisis parameter hidrostatis dan analisis tahanan gerak
Hasil penelitian ini menunjukkan bahwa ketiga rasio dimensi utama model perahu katir ini masih berada dalam rentang rasio dimensi utama kapal berdasarkan metode pengoperasian encircling gear dan static gear. Nilai tahanan gerak model perahu berbanding lurus terhadap kecepatannya.
UJI TAHANAN GERAK
MODEL PERAHU KATIR PALABUHANRATU
GALIH ARIEF SAKSONO
C54104077
Skripsi
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Perikanan pada
Fakultas Perikanan dan Ilmu Kelautan
DEPARTEMEN PEMANFAATAN SUMBERDAYA PERIKANAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
SKRIPSI
Judul : Uji Tahanan Gerak Model Perahu Katir Palabuhanratu Nama : Galih Arief Saksono
NRP : C54104077
Program Studi : Pemanfaatan Sumberdaya Perikanan
Disetujui: Pembimbing
Dr. Budhi Hascaryo Iskandar NIP. 196702151991031004
Diketahui:
Dekan Fakultas Perikanan dan Ilmu Kelautan
Prof. Dr. Ir. Indra Jaya, M.Sc NIP.196104101986011002
KATA PENGANTAR
Penelitian dengan judul “Uji Tahanan Gerak Model Perahu Katir Palabuhanratu” ini ditujukan untuk memenuhi syarat memperoleh gelar sarjana perikanan pada Departemen Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
Penulis mengucapkan terima kasih yang kepada:
1) Bapak Dr. Budhi Hascaryo Iskandar selaku dosen pembimbing atas arahan dan bimbingan yang telah diberikan dalam penyusunan skripsi ini.
2) Ibu Yopi Novita, S.Pi M.Si dan Bapak Ir. Wazir Mawardi, M.Si selaku dosen penguji atas arahan dan sarannya dalam perbaikan skrispi ini.
3) Ibu Dr. Ir. Tri Wiji Nurani, M.Si dan Bapak Dr. Ir. Mohammad Imron, M.Si selaku komisi pendidikan atas arahan dan saran-sarannya.
4) Teman-teman PSP 41, khususnya saudara Resa Isroin Fauzy S.Pi, Deden Haeruman Azam, Ipan Muhammad Supanji S.Pi, M. Reza Qadarian dan Rusman Hadi dukungan dan bantuannya dalam menyelesaikan skripsi ini. 5) Keluarga tercinta (Ayah, Ibu dan Kakak) yang telah banyak membantu baik
materi, motivasi serta kasih sayangnya.
Demikian pengantar ini penulis sampaikan, mudah-mudahan skripsi ini dapat bermanfaat bagi kita semua.
Bogor, Agustus 2009
RIWAYAT HIDUP
Penulis dilahirkan di Jakarta tanggal 20 Maret 1986 dari pasangan Bapak Catur Hernanto dan Ibu Krisnawaty Bantas. Penulis merupakan anak kedua dari dua bersaudara.
Tahun 1998 penulis menyelesaikan pendidikan Sekolah Dasar di SDN 07 Pagi Pondok Labu Cilandak Jakarta. Tahun 2001 lulus dari Sekolah Lanjutan Tingkat Pertama (SLTP 85) Jakarta. Tahun 2004 penulis lulus dari Sekolah Menengah Umum Negeri (SMUN 34) Jakarta sekaligus lulus masuk IPB melalui jalur Seleksi Penerimaan Mahasiswa Baru (SPMB). Penulis diterima pada Program Studi Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
DAFTAR ISI
Halaman
DAFTAR TABEL ... x
DAFTAR GAMBAR ... xi
DAFTAR LAMPIRAN ... xii
1 PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan ... 2
1.3 Manfaat ... 2
2 TINJAUAN PUSTAKA 2.1 Kapal Ikan ... 3
2.1.1 Desain kapal ikan ... 5
2.1.2 Koefisien bentuk ... 7
2.1.3 Perahu katir ... 8
2.2 Stabilitas Kapal ... 8
2.3 Tahanan Gerak Kapal ... 10
3 METODOLOGI 3.1 Waktu dan Tempat Penelitian ……… 11
3.2 Alat dan Obyek Penelitian ……….. 11
3.3 Pengumpulan Data ……….... 11
3.4 Pembuatan Model Ikonik Perahu Katir ……….... 13
3.4.1 Desain model ikonik perahu katir ….………. 14
3.4.2 Konstruksi model ……… 18
3.5 Pengolahan Data ……… 19
3.6 Analisis Data ……… 23
3.7 Uji Coba di Kolam Percobaan BDP ……… 23
4 HASIL DAN PEMBAHASAN 4.1 Desain Model Perahu ……….. 30
4.2 Nilai Parameter Hidrostatis Perahu Katir ……… 34
4.3 Wetted Surface Area (luas permukaan basah badan perahu) ………….. 39
4.4 Tahanan Gerak Model Perahu ………. 39
5 KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 50
5.2 Saran ... 50
DAFTAR PUSTAKA ... 51
DAFTAR GAMBAR
Halaman 1 Ilustrasi posisi ketiga titik yang mempengaruhi stabilitas kapal …………... 9
2 Skema kegiatan penelitian uji tahanan gerak
model perahu katir Palabuhanratu ……… 13 3 General Arrangement model parahu katir Palabuhanratu ……… . 14 4 Lines plan model perahu katir Palabuhanratu ……….. 17 5 Ilustrasi konstruksi model perahu katir tampak samping dan atas sebelum pendempulan ……….……… 18 6 Tampilan model setelah didempul dan dicat ………. 18 7 Ilustrasi pengambilan data tahanan gerak dan kecepatan linier
model perahu tampak atas ………..…… 28 8 Ilustrsi pengambilan data tahanan gerak dan kecepatan linier
model perahu tampak samping ……….. 29 9 Nilai rasio dimensi utama model perahu
pada rentang nilai kelompok perahu encircling gear ... 32 10 Nilai rasio dimensi utama model perahu
pada rentang nilai kelompok perahu static gear ……… 33 11 Nilai rasio dimensi utama model perahu
pada rentang nilai kelompok perahu towed gear ………...………… 34 12 Kurva hidrostatis perahu katir ……….. 38 13 Ilustrasi proses pengukuran WSA ……… 39 14 Grafik hubungan kecepatan linier dengan tahanan gerak
pada model perahu ……… 42 15 Grafik perbandingan antara tahanan gerak
model perahu dengan tahanan gesek model perahu yang diestimasi ……… 45 16 Grafik perbandingan antara tahanan gerak pada perahu dengan tahanan gesek
DAFTAR TABEL
Halaman 1 Data tahanan gerak pada tiga jenis kecepatan linier model perahu ……….. 24 2 Ukuran dimensi utama model perahu katir
pada penelitian uji tahanan gerak perahu katir Palabuhanratu ………. 30 3 Rasio dimensi utama perahu ikan berdasarkan
metode pengoperasian alat tangkap yang ada di Indonesia ………. 31 4 Rasio dimensi utama model perahu
dalam penelitian uji tahanan gerak model perahu katir Palabuhanratu …… 31 5 Nilai koefisien bentuk perahu berdasarkan
metode pengoperasian alat tangkap yang ada di Indonesia ……… 36 6 Nilai koefisien bentuk perahu
hasil pengukuran model perahu yang digunakan dalam penelitian ………… 36 7 Nilai hidrostatis perahu katir ……… 37 8 Hasil perhitungan data tahanan gerak model katir Palabuhanratu ………… 41 9 Hasil perhitungan tahanan gesek model perahu
UJI TAHANAN GERAK
MODEL PERAHU KATIR PALABUHANRATU
GALIH ARIEF SAKSONO
SKRIPSI
DEPARTEMEN PEMANFAATAN SUMBERDAYA PERIKANAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI
Dengan ini saya menyatakan bahwa skripsi dengan judul “Uji Tahanan Gerak Pada Model Perahu Katir Palabuhanratu” adalah karya sendiri dan belum pernah diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Bogor, Agustus 2009
Galih Arief Saksono
ABSTRAK
GALIH ARIEF SAKSONO. Uji Tahanan Gerak Model Perahu Katir Palabuhanratu. Dibimbing oleh BUDHI HASCARYO ISKANDAR.
Dalam pengopersiannya, kapal bergerak melalui media air karena adanya gaya dorong dari sistem penggerak kapal. Air memiliki pengaruh terhadap kapal karena akan memberikan gaya perlawanan (resistant force) dari pergerakan kapal yang disebut ship resistance. Bagian kapal yang tidak tercelup air juga akan mengalami tahanan yang berasal dari angin. Namun air memiliki pengaruh yang lebih signifikan terhadap pergerakan kapal karena tahanan dari air memiliki nilai yang lebih besar dibandingkan dari udara. Di Indonesia sebagian besar kapal perikanan dibangun secara tradisional yaitu terbuat dari kayu dan dibangun tanpa perencanaan gambar ataupun perhitungan secara matematis sehingga pembuatan kapal hanya berdasarkan pengetahuan turun-menurun. Oleh karena itu kapal-kapal tersebut belum diketahui parameter hidrostatisnya. Salah satu kapal tradisional yang banyak digunakan nelayan di Indonesia adalah perahu katir. Metode penangkapan yang besifat aktif menuntut perahu tesebut bergerak dengan kecepatan yang tinggi, namun pada umumnya nelayan tidak memperhatikan efisiensi dari pergerakan perahu dengan daya yang dihasilkan motor tempel. Efisiensi tersebut berkaitan erat dengan besarnya
ship resistance yang terjadi pada perahu saat melaju. Dengan gaya dorong yang sama, semakin besar tahanan yang dimiliki kapal maka kecepatan perahu akan berkurang. Pada dasarnya tahanan gerak perahu dapat diestimasi menggunakan suatu pendekatan analisis data hirdostatis yang diolah dengan model simulasi, namun pada akhirnya percobaan secara eksperimental juga diperlukan karena memiliki tingkat keakuratan data yang lebih tinggi. Berdasarkan hal tersebut, penelitian mengenai tahanan gerak perahu katir perlu dilakukan. Namun pada kenyataannya pengujian tahanan gerak menggunakan perahu dengan ukuran yang sebenarnya sulit dilakukan. Oleh sebab itu, model ikonik—suatu model perahu berukuran kecil yang memiliki skala terhadap perahu sebenarnya—diperlukan untuk dijadikan sebagai media uji. Penelitian ini bertujuan menghitung parameter hidrostatis dan menghitung tahanan gerak model perahu katir.
Penelitian ini bersifat eksperimental. Analisis data yang digunakan berupa
deskriptif-numerik meliputi: analisis rasio dimensi utama, analisis parameter hidrostatis dan analisis tahanan gerak
Hasil penelitian ini menunjukkan bahwa ketiga rasio dimensi utama model perahu katir ini masih berada dalam rentang rasio dimensi utama kapal berdasarkan metode pengoperasian encircling gear dan static gear. Nilai tahanan gerak model perahu berbanding lurus terhadap kecepatannya.
UJI TAHANAN GERAK
MODEL PERAHU KATIR PALABUHANRATU
GALIH ARIEF SAKSONO
C54104077
Skripsi
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Perikanan pada
Fakultas Perikanan dan Ilmu Kelautan
DEPARTEMEN PEMANFAATAN SUMBERDAYA PERIKANAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
SKRIPSI
Judul : Uji Tahanan Gerak Model Perahu Katir Palabuhanratu Nama : Galih Arief Saksono
NRP : C54104077
Program Studi : Pemanfaatan Sumberdaya Perikanan
Disetujui: Pembimbing
Dr. Budhi Hascaryo Iskandar NIP. 196702151991031004
Diketahui:
Dekan Fakultas Perikanan dan Ilmu Kelautan
Prof. Dr. Ir. Indra Jaya, M.Sc NIP.196104101986011002
KATA PENGANTAR
Penelitian dengan judul “Uji Tahanan Gerak Model Perahu Katir Palabuhanratu” ini ditujukan untuk memenuhi syarat memperoleh gelar sarjana perikanan pada Departemen Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
Penulis mengucapkan terima kasih yang kepada:
1) Bapak Dr. Budhi Hascaryo Iskandar selaku dosen pembimbing atas arahan dan bimbingan yang telah diberikan dalam penyusunan skripsi ini.
2) Ibu Yopi Novita, S.Pi M.Si dan Bapak Ir. Wazir Mawardi, M.Si selaku dosen penguji atas arahan dan sarannya dalam perbaikan skrispi ini.
3) Ibu Dr. Ir. Tri Wiji Nurani, M.Si dan Bapak Dr. Ir. Mohammad Imron, M.Si selaku komisi pendidikan atas arahan dan saran-sarannya.
4) Teman-teman PSP 41, khususnya saudara Resa Isroin Fauzy S.Pi, Deden Haeruman Azam, Ipan Muhammad Supanji S.Pi, M. Reza Qadarian dan Rusman Hadi dukungan dan bantuannya dalam menyelesaikan skripsi ini. 5) Keluarga tercinta (Ayah, Ibu dan Kakak) yang telah banyak membantu baik
materi, motivasi serta kasih sayangnya.
Demikian pengantar ini penulis sampaikan, mudah-mudahan skripsi ini dapat bermanfaat bagi kita semua.
Bogor, Agustus 2009
RIWAYAT HIDUP
Penulis dilahirkan di Jakarta tanggal 20 Maret 1986 dari pasangan Bapak Catur Hernanto dan Ibu Krisnawaty Bantas. Penulis merupakan anak kedua dari dua bersaudara.
Tahun 1998 penulis menyelesaikan pendidikan Sekolah Dasar di SDN 07 Pagi Pondok Labu Cilandak Jakarta. Tahun 2001 lulus dari Sekolah Lanjutan Tingkat Pertama (SLTP 85) Jakarta. Tahun 2004 penulis lulus dari Sekolah Menengah Umum Negeri (SMUN 34) Jakarta sekaligus lulus masuk IPB melalui jalur Seleksi Penerimaan Mahasiswa Baru (SPMB). Penulis diterima pada Program Studi Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
DAFTAR ISI
Halaman
DAFTAR TABEL ... x
DAFTAR GAMBAR ... xi
DAFTAR LAMPIRAN ... xii
1 PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan ... 2
1.3 Manfaat ... 2
2 TINJAUAN PUSTAKA 2.1 Kapal Ikan ... 3
2.1.1 Desain kapal ikan ... 5
2.1.2 Koefisien bentuk ... 7
2.1.3 Perahu katir ... 8
2.2 Stabilitas Kapal ... 8
2.3 Tahanan Gerak Kapal ... 10
3 METODOLOGI 3.1 Waktu dan Tempat Penelitian ……… 11
3.2 Alat dan Obyek Penelitian ……….. 11
3.3 Pengumpulan Data ……….... 11
3.4 Pembuatan Model Ikonik Perahu Katir ……….... 13
3.4.1 Desain model ikonik perahu katir ….………. 14
3.4.2 Konstruksi model ……… 18
3.5 Pengolahan Data ……… 19
3.6 Analisis Data ……… 23
3.7 Uji Coba di Kolam Percobaan BDP ……… 23
4 HASIL DAN PEMBAHASAN 4.1 Desain Model Perahu ……….. 30
4.2 Nilai Parameter Hidrostatis Perahu Katir ……… 34
4.3 Wetted Surface Area (luas permukaan basah badan perahu) ………….. 39
4.4 Tahanan Gerak Model Perahu ………. 39
5 KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 50
5.2 Saran ... 50
DAFTAR PUSTAKA ... 51
DAFTAR GAMBAR
Halaman 1 Ilustrasi posisi ketiga titik yang mempengaruhi stabilitas kapal …………... 9
2 Skema kegiatan penelitian uji tahanan gerak
model perahu katir Palabuhanratu ……… 13 3 General Arrangement model parahu katir Palabuhanratu ……… . 14 4 Lines plan model perahu katir Palabuhanratu ……….. 17 5 Ilustrasi konstruksi model perahu katir tampak samping dan atas sebelum pendempulan ……….……… 18 6 Tampilan model setelah didempul dan dicat ………. 18 7 Ilustrasi pengambilan data tahanan gerak dan kecepatan linier
model perahu tampak atas ………..…… 28 8 Ilustrsi pengambilan data tahanan gerak dan kecepatan linier
model perahu tampak samping ……….. 29 9 Nilai rasio dimensi utama model perahu
pada rentang nilai kelompok perahu encircling gear ... 32 10 Nilai rasio dimensi utama model perahu
pada rentang nilai kelompok perahu static gear ……… 33 11 Nilai rasio dimensi utama model perahu
pada rentang nilai kelompok perahu towed gear ………...………… 34 12 Kurva hidrostatis perahu katir ……….. 38 13 Ilustrasi proses pengukuran WSA ……… 39 14 Grafik hubungan kecepatan linier dengan tahanan gerak
pada model perahu ……… 42 15 Grafik perbandingan antara tahanan gerak
model perahu dengan tahanan gesek model perahu yang diestimasi ……… 45 16 Grafik perbandingan antara tahanan gerak pada perahu dengan tahanan gesek
DAFTAR TABEL
Halaman 1 Data tahanan gerak pada tiga jenis kecepatan linier model perahu ……….. 24 2 Ukuran dimensi utama model perahu katir
pada penelitian uji tahanan gerak perahu katir Palabuhanratu ………. 30 3 Rasio dimensi utama perahu ikan berdasarkan
metode pengoperasian alat tangkap yang ada di Indonesia ………. 31 4 Rasio dimensi utama model perahu
dalam penelitian uji tahanan gerak model perahu katir Palabuhanratu …… 31 5 Nilai koefisien bentuk perahu berdasarkan
metode pengoperasian alat tangkap yang ada di Indonesia ……… 36 6 Nilai koefisien bentuk perahu
hasil pengukuran model perahu yang digunakan dalam penelitian ………… 36 7 Nilai hidrostatis perahu katir ……… 37 8 Hasil perhitungan data tahanan gerak model katir Palabuhanratu ………… 41 9 Hasil perhitungan tahanan gesek model perahu
DAFTAR LAMPIRAN
Halaman
1 Tabel perhitungan parameter hidrostatis ………. 54
2 Perhitungan parameter hidrostatis ... 59
3 Contoh perhitungan estimasi metode Froude ... 67
1 PENDAHULUAN
1.1 Latar Belakang
Kapal merupakan sarana yang digunakan manusia untuk melakukan aktifitas di perairan. Di antara aktifitas-aktifitas tersebut adalah eksplorasi, pelayaran, pengangkutan barang, penelitian ekosistem laut, militer kelautan, dan tentu saja penangkapan ikan untuk kebutuhan pangan. Dengan adanya kegunaan dan aktifitas kapal yang berbeda-beda, kapal memiliki ukuran dan bentuk yang beragam sesuai dengan kebutuhan operasinya tersebut. Di dalam perikanan tangkap, kapal merupakan salah satu bagian dari unit penangkapan yang penting karena memiliki fungsi antara lain sebagai alat transportasi dari fishing base ke
fishing ground dan sebaliknya, sarana untuk melakukan metode penangkapan ikan dan tempat menampung hasil tangkapan.
Kapal perikanan berbeda dibandingkan kapal penumpang biasa. Keistimewaan pokok yang dimiliki oleh kapal ikan antara lain : kecepatan, olah gerak, layak laut, navigable area, hull structure, propulsion engine, perlengkapan
storage dan alat penangkapan ikan (Ayodhyoa, 1972). Di Indonesia sebagian besar kapal perikanan dibangun secara tradisional yaitu terbuat dari kayu dan dibangun tanpa perencanaan gambar ataupun perhitungan secara matematis sehingga pembuatan kapal hanya berdasarkan pengetahuan turun-menurun. Oleh karena itu kapal-kapal tersebut belum diketahui parameter hidrostatisnya. Walaupun demikian kapal-kapal tersebut telah memberikan kemudahan kepada para nelayan dalam pengopersian penangkapan ikan, hal itu terbukti dari sebagian besar hasil tangkapan yang didaratkan di Indonesia didaratkan oleh kapal tradisional.
Salah satu kapal tradisional yang banyak digunakan nelayan di Indonesia adalah perahu katir. Perahu ini beroperasi di sekitar pantai dan biasanya membawa alat tangkap yang bersifat aktif maupun pasif. Pengoperasian perahu ini umumnya digerakkan oleh motor tempel. Metode penangkapan yang besifat aktif menuntut perahu tesebut bergerak dengan kecepatan yang tinggi, namun pada umumnya nelayan tidak memperhatikan efisiensi dari pergerakan perahu dengan daya yang dihasilkan motor tempel. Efisiensi tersebut berkaitan erat dengan besarnya ship resistance yang terjadi pada perahu saat melaju. Dengan gaya dorong yang sama, semakin besar tahanan yang dimiliki kapal maka kecepatan kapal akan berkurang (Djatmiko, et all 1983).
Pada dasarnya tahanan gerak kapal dapat diestimasi menggunakan suatu pendekatan analisis data hirdostatik yang diolah dengan model simulasi, namun pada pada akhirnya percobaan secara eksperimental juga diperlukan karena memiliki tingkat keakuratan data yang lebih tinggi. Berdasarkan hal tersebut, penelitian mengenai tahanan gerak perahu katir perlu dilakukan. Namun pada kenyataannya pengujian tahanan gerak dengan menggunakan perahu dengan ukuran yang sebenarnya sulit dilakukan. Oleh sebab itu, model ikonik—suatu model perahu berukuran kecil yang memiliki skala terhadap perahu sebenarnya— diperlukan untuk dijadikan sebagai media uji. Pengujian model perahu merupakan salah satu tahapan yang dilakukan dalam perancangan dan pembangunan pada industri pembangunan kapal.
1.2 Tujuan Penelitian
Tujuan dari penelitian ini adalah menentukan tahanan gerak model perahu katir dengan mengetahui ukuran parameter hidrostatis terlebih dahulu.
1.3 Manfaat Penelitian
2 TINJAUAN PUSTAKA
2.1 Kapal Ikan
Menurut Nomura dan Yamazaki (1977) kapal perikanan adalah suatu fasilitas apung yang digunakan dalam aktifitas perikanan seperti kegiatan penangkapan ikan di laut lepas serta perairan pedalaman, kegiatan penelitian, pemanduan, latihan dan pengawasan. Kapal perikanan mempunyai karakteristik khusus dalam hal kecepatan, olah gerak kapal, tahanan, kemampuan jelajah, mesin, konstruksi, fasilitas penyimpanan dan pengolahan. Syarat-syarat umum kapal ikan untuk operasi penangkapan ikan adalah kekuatan struktur badan kapal, menunjang keberhasilan operasi penangkapan ikan, mempunyai stabilitas yang tinggi dan fasilitas yang lengkap untuk penyimpanan.
Selanjutnya Nomura dan Yamazaki (1977) juga mengemukakan bahwa kapal ikan berbeda dengan jenis kapal lainnya, sehingga memiliki beberapa keistimewaan yakni:
(1) Kecepatan kapal; membutuhkan kecepatan yang tinggi untuk mengamati dan mengejar kelompok ikan serta membawa hasil tangkapan yang segar dalam waktu yang relatif singkat.
(2) Kemampuan olah gerak kapal; membutuhkan olah gerak khusus yang baik pada saat pengoperasian, seperti kemampuan kemudi (steerability) yang baik, radius putaran (turning cycle) yang kecil dan daya dorong mesin (propulsion engine) yang dapat dengan mudah bergerak maju dan mundur.
(3) Kelaiklautan; laiklaut digunakan dalam operasi penangkapan ikan dan cukup tahan untuk melawan kekuatan angin, gelombang, stabilitas yang tinggi dan daya apung yang cukup diperlukan untuk menjamin keamanan dalam pelayaran.
(4) Lingkup area pelayaran; lingkup area pelayaran harus luas karena pelayarannya ditentukan oleh pergerakan kelompok ikan, daerah musim ikan dan migrasi ikan.
Disamping itu konstruksi kapal pun harus dapat menahan beban getaran mesin yang ditimbulkan.
(6) Daya dorong mesin; kapal ikan membutuhkan daya dorong mesin yang cukup besar dengan sebisa mungkin volume mesin yang kecil dan getaran yang kecil pula.
(7) Fasilitas penyimpanan dan pengolahan ikan; umumnya kapal ikan dilengkapi dengan fasilitas penyimpanan hasil tangkapan dalam ruang tertentu (palkah) berpendingin terutama untuk kapal-kapal yang memiliki trip cukup lama, terkadang bahkan ada yang dilengkapi dengan ruang pembekuan dan pengolahan.
(8) Mesin-mesin bantu perlengkapan; umumnya kapal ikan dilengkapi dengan mesin-mesin bantu ini sepeti winch, power block, line hauler, dan sebagainya. Desain dan konstruksi kapal ikan untuk ukuran tertentu harus dapat menyediakan tempat yang sesuai untuk hal ini.
Menurut Fyson (1985), kapal ikan adalah kapal yang khusus digunakan untuk kegiatan perikanan. Kapal tersebut dilihat dari segi ukuran, perlengkapan dek, kapasitas muatan, akomodasi, mesin dan perlengkapanya yang fungsinya berhubungan dengan operasi penagkapan ikan.
Syarat-syarat bentuk umum kapal yang juga harus dimiliki oleh kapal ikan menurut (Brown, 1957 diacu dalam Liberty, 1997) terdiri atas:
(1) Seaworthines, merupakan kesanggupan berlayar di laut dengan baik, bentuk yang dapat memberikan stabilitas dan daya apung yang baik.
(2) Seakindlines, merupakan pergerakan selama di laut dipandang dari sudut mudahnya bergerak dan memberi kepuasan sebanyak-banyaknya kepada anak buah, yaitu jika kapal kering (bersih), cukup mempunyai daya apung, mengangguk, dan oleng dengan tidak tersentak-sentak dan mudah dioperasikan.
(3) Effeciency, yang sebagian besar adalah masalah ekonomi berdasarkan pada kebutuhan ukuran, tenaga dan kecepatan, jarak dan penangkapan.
Menurut Iskandar dan Pujiati (1995), kapal ikan berdasarkan metode pengoperasian alat tangkap dibagi menjadi 4 kelompok, yaitu :
(1) Kelompok kapal encircling gear, yaitu kelompok kapal yang mengoperasikan alat tangkap dengan cara dilingkarkan;
(2) Static gear, yaitu kelompok kapal yang mengoperasikan alat tangkap pasif; (3) Towed gear, yaitu kelompok kapal yang mengoperasikan alat tangkap dengan
cara ditarik;
(4) Multi purpose, yaitu kelompok kapal yang mengoperasikan lebih dari satu alat tangkap.
2.1.1 Desain kapal ikan
Menurut Ayodhyoa (1972) salah satu hal penting dalam desain sebuah kapal adalah perbandingan dimensi kapal (L/B, L/D, B/D). Jika nilai L/B menurun maka akan berpengaruh negatif (-) terhadap kecepatan kapal, dan jika nilai L/D membesar akan berpengaruh negatif (-) terhadap kekuatan memanjang kapal. Lain halnya dengan nilai B/D, jika nilainya membesar maka akan berpengaruh positif (+) terhadap stabilitas kapal tetapi berpengaruh negatif terhadap propulsive ability
kapal.
Fyson (1985) menyatakan nilai dari dimensi utama menentukan kemampuan dari suatu kapal. Ukuran dari dimensi utama antara lain adalah :
(1) LOA (Length Over All), yaitu panjang seluruh kapal diukur dari bagian paling ujung haluan hingga bagian paling ujung buritan kapal;
(2) LPP (Length Perpendicular), yaitu panjang kapal antara AP dan FP. AP (After Perpendicular) merupakan garis khayal yang tegak lurus pada perpotongan antara Lwl pada bagian buritan kapal, sedangkan FP (Fore Perpendicular) merupakan garis khayal yang tegak lurus pada perpotongan antara Lwl dan badan kapal bagian haluan kapal. Lwl (Load water line), yaitu garis air pada kondisi kapal penuh;
(4) B (Breadth), yaitu lebar kapal terlebar yang diukur dari satu sisi ke sisi lainnya;
(5) D (Depth), yaitu bagian dalam/tinggi kapal yang diukur dari dek terendah hingga ke bagian badan kapal terbawah.
(6) d (Draft), yaitu bagian dalam kapal diukur dari Lwl hingga ke badan kapal bagian terbawah.
Fyson (1985) menyatakan bahwa desain dapat digambarkan sebagai proses merumuskan perincian dan menghasilkan gambar dari sebuah proyek untuk tujuan pembuatan dan pengoperasiannya.
Menurut Fyson (1985) prosedur atau tahapan desain dari sebuah kapal ikan adalah sebagai berikut:
(1) Persiapan tentang rancangan kapal;
(2) Pengevaluasian data dari kapal yang relatif sama; (3) Penentuan nilai L/B, L/D, B/D, Cb;
(4) Perkiraan nilai Ton displacement (∆), Volume displacement (∇),L, B, D, d; (5) Perkiraan berat kapal pada kondisi kosong;
(6) Perhitungan berat untuk kondisi penuh; (7) Gambar rancangan umum;
(8) Pemilihan nilai coefficient of fineness selain Cb; (9) Gambar rencana garis;
(10)Perhitungan tahanan penggerak dan kekuatan mesin;
(11)Perhitungan dan pemilihan mesin-mesin tambahan yang diperlukan; (12)Persiapan akhir gambar rancangan umum dan rencana garis dan (13)Persiapan spesifikasi.
2.1.2 Koefisien bentuk
Bentuk badan kapal menurut Fyson (1985) digambarkan oleh suatu koefisen bentuk yang disebut coefficient of fineness. Koefisien bentuk kapal merupakan koefisien yang menggambarkan tingkat kegemukan kapal pada tiap garis air. Koefisien bentuk ini menujukkan bentuk tubuh kapal berdasarkan hubungan antara luas area tubuh kapal yang berbeda dan volume tubuh kapal terhadap masing-masing dimensi utama kapal. Koefisien bentuk terdiri atas:
(1) Coefficient of block (Cb), menunjukkan perbandingan antara nilai kapasitas
displacement kapal dengan volume bidang empat persegi panjang yang mengelilingi tubuh kapal;
(2) Coefficient of midship (C⊗), menunjukkan perbandingan luas area penampang melintang tengah kapal dengan bidang empat persegi panjang yang mengelilingi luas area tersebut;
(3) Coefficient of waterplan (Cw), menunjukkan besarnya luas area penampang membujur tengah kapal dibandingkan dengan bidang empat persegi panjang yang mengelilingi luas area tersebut;
(4) Coefficient of prismatic (Cp), ditunjukkan perbandingan antara kapasitas
displacement kapal dengan volume yang dibentuk oleh luas area penampang melintang tengah kapal dengan panjang kapal pada water line. Cp juga dapat diperoleh dengan membandingkan nilai Cb dengan nilai dan C⊗;
(5) Coefficient vertical prismatic (Cvp), menunjukkan perbandingan antara kapasitas displacement kapal dengan volume yang dibentuk oleh luas water plan area dengan draft kapal. Cvp juga dapat diperoleh dengan membandingkan nilai Cb dengan nilai Cw.
Muckle (1975) menyatakan bahwa semakin besar nilai coeffiecient of block
2.1.3 Perahu katir
Perahu katir terinspirasi dari jenis perahu katamaran. Perahu katamaran merupakan satu unit perahu/kapal dengan dua lambung yang dihubungkan dengan kuat oleh palang-palang bersilang, menjadi satu kesatuan yang kokoh dan dikemudikan sebagai satu kapal (Mac Lear, 1967 diacu dalam Wahyudi, 2005).
Adanya perahu berkatir dan katamaran terjadi akibat pencampuran budaya antara orang-orang Polynesia (orang-orang yang kini mendiami wilayah Indonesia) dengan orang Melanesia yang sekarang mendiami wilyah Irian dan pulau-pulau sekitarnya. Orang–orang Melanesia sebelumnya telah mengenal kebudayaan perahu berkatir dan katamaran. Akhirnya orang-orang Polynesia meniru dengan jalan memberi katir pada perahu balok kayu (dag-out canoe) yaitu dengan tiang melintang yang diikatkan secara sederhana ke sebuah pelampung. Sedangkan orang Melanesia menggunakan tongkat penghubung yang dipasang melintang dengan pelampung untuk menghindari hambatan air (Morwood, 1972
diacu dalam Wahyudi, 2005).
Perahu dengan katir dari bambu pada kedua sisinya banyak digunakan di pulau-pulau Asia Tenggara. Sedangkan perahu dengan satu katir pada salah satu sisinya dominan digunakan di pulau-pulau tropic pasifik, Menurut Shibata dan Masengi (1991) diacu dalam Liberty (1997) seluruh perahu di pulau Jawa lebar dan tidak mempunyai katir. Perahu berkatir ditemukan di Palabuhanratu dan Cilacap di Pesisir Samudra Hindia, serta Tuban dan Rembang di Pesisir Laut Jawa.
2.2 Stabilitas Kapal
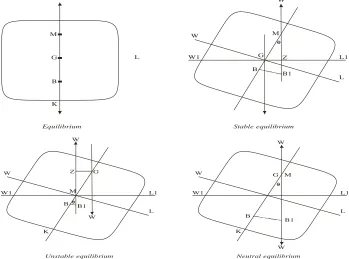
Stabilitas adalah kemampuan kapal untuk kembali ke posisi semula setelah menjadi miring akibat gaya yang datang dari dalam ataupun luar kapal. Menurut Taylor (1977) diacu dalam Rahayu (2006), menjelaskan bahwa kondisi stabilitas dibedakan menjadi 3 jenis, yaitu:
metasenter positif dengan lengan penegak (GZ) positif pula, yang dapat mengembalikan kapal ke posisi semula.
2) Unstable equilibrium atau keseimbangan tidak stabil yaitu kondisi dimana kapal menjadi miring akibat adanya gaya yang bekerja pada kapal dan kapal tidak dapat kembali ke posisi semula melainkan terus ke arah kemiringannya. Hal ini dapat terjadi apabila pusat gravitasi (G) lebih tinggi dari titik metacenter (M) atau kapal memiliki tinggi metacenter (GM) negative dan lengan penegak (M) negatif meneruskan gerak ke arah olengnya kapal.
3) Netral equilibrium atau keseimbangan netral yaitu kondisi dimana kapal menjadi miring akibat gaya yang bekerja dan kondisi ini tetap tidak berubah ke posisi semula atau pun bergerak ke arah kemiringan. Pada kondisi ini, posisi titik pusat gravitasi (G) berhimpit dengan titik metacenter (M) di satu titik (zero GM) dan tidak dihasilkan lengan kopel GZ. Kondisi ini juga disebut list.
L K B G M Equilibrium W1 L1 W L W M G Z B B1 Stable equilibrium W1 L1 W L W G M B B1 Unstable equilibrium W1 L1 W L W M G B B1 Neutral equilibrium W Z K W K
[image:30.595.137.486.398.657.2]Keterangan :
B : Centre of buoyancy K : Keel (lunas)
G : Centre of gravity W : Gaya yang bekerja θ
M : Metacentre θ : Sudut oleng GZ : Righting arm WL : Water line
2.3 Tahanan Gerak Kapal
Tahanan kapal pada suatu kecepatan adalah gaya fluida yang bekerja pada kapal sedemikian rupa sehingga melawan gerakan kapal tersebut. Tahanan total kapal terdiri dari komponen-komponen yang berbeda yang diakibatkan dari berbagai macam penyebab dan saling berinterkasi dengan cara yang rumit. Komponen-komponen tersebut diantaranya terdiri dari tahanan gesek, tahanan sisa, tahanan viskositas, tahanan udara dan tahanan kemudi (Harvald, 1992).
Salah satu faktor yang mempengaruhi kecepatan adalah tahanan gerak kapal. Dengan tenaga kuda yang sama, semakin besar tahanan yang dimiliki oleh kapal maka kecepatan kapal akan semakin berkurang (Djatmiko et al., 1983).
Menurut Fyson (1985), tahanan kapal pada kecepatan yang diberikan merupakan daya yang dikehendaki untuk melaju pada perairan tenang, diasumsikan tidak terdapat gangguan dari mesin kapal. Bila kapal tidak mengalami penambahan beban, disebut tahanan badan kapal pada saat kosong.
Muckle (1975) menyatakan bahwa tahanan gesek adalah tahanan yang timbul karena adanya gesekan antara kapal dengan cairan yang bergerak. Faktor yang mempengaruhi besarnya tahanan gesek antara lain dimensi utama, koefisien bentuk dan luas permukaan kapal yang terbenam dalam air. Adapun Djatmiko et al. (1983) menyatakan bahwa tahan gesek tergantung dari luas permukaan basah, kekasaran permukaan kapal, kecepatan kapal serta viskositas dari media cairan.
3
METODOLOGI
3.1 Waktu dan Tempat Penelitian
Penelitian ini dilakukan pada bulan April sampai Mei 2009 dengan menggunakan percobaan eksperimental. Kegiatan penelitian terdiri dari pembuatan model ikonik perahu katir dan pengujian model perahu katir yang dilakukan di kolam percobaan BDP dan analisis data dilakukan di Laboratorium Kapal Perikanan & Navigasi PSP FPIK IPB.
3.2 Alat dan Objek
Alat yang digunakan dalam penelitian ini adalah : 1) Neraca pegas;
2) Benang nylon;
3) Stopwatch;
4) Penggaris/meteran; 5) Milimeter block;
6) Katrol;
7) Dinamo penggulung; 8) Kabel gulung;
Objek penelitian yang digunakan yaitu model ikonik perahu katir.
3.3 Pengumpulan Data
Pada penelitian ini, data yang perlu dikumpulkan adalah sebagai berikut : 1) Dimensi utama perahu katir.
2) Dimensi utama model perahu katir.
Data ini dapat diketahui setelah menentukan skala dari model perahu yang akan diuji, berfungsi sebagai informasi ukuran model perahu katir digunakan dalam analisis dan pengolahan data parameter hidrostatik.
3) Wetted surface area (WSA).
Tahap awal yang diperlukan dalam pengukuran data ini adalah penentuan
draft perahu. Penentuan draft tersebut dapat diketahui dengan cara mengapungkan perahu di kolam percobaan dalam keadaan diam (statis) hingga draft perahu dapat terlihat. Tahap berikutnya dilakukan secara manual yaitu dengan memplotkan kertas millimeter block pada permukaan perahu yang terendam air.
4) Kecepatan model perahu.
Pengukuran data tersebut dilakukan dengan menarik model perahu menggunakan benang nylon yang dililitkan pada dinamo penggulung. Pengukuran ini menggunakan peralatan stopwatch untuk mencatat waktu tempuh. Tahap awal yang dilakukan adalah penentuan jarak yaitu titik awal dan titik akhir lalu jalur yang akan ditempuh model perahu. Tahap selanjutnya adalah pengukuran waktu tempuh model perahu dari titik awal ke titik akhir. Pengambilan data tersebut dilakukan dengan sepuluh kali ulangan. 5) Tahanan gerak.
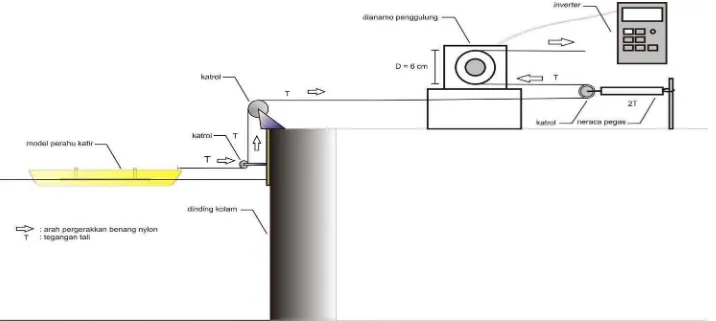
Data tersebut diperoleh pada saat model perahu diberi perlakuan dan pengukurannya menggunakan peralatan berupa neraca pegas. Neraca pegas tersebut dikaitkan dengan katrol yang telah terhubung dengan dinamo penggulung dan haluan model perahu yang diberi perlakuan. Reaksi dari pergerakan model perahu yang mendapat gaya dari fluida yang berlawanan akan mengakibatkan pergerakan skala dari neraca. Asumsi yang digunakan dalam pengambilan data tersebut adalah sebagai berikut :
a. Keadaan air tenang; b. Pengaruh angin diabaikan;
c. Tahanan gesek pada neraca pegas dan katrol diabaikan; dan
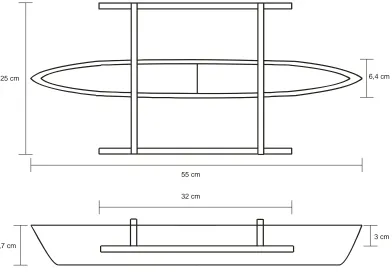
3.4 Pembuatan Model Ikonik Perahu Katir
[image:34.595.181.438.441.718.2]Ukuran dimensi utama dari model perahu yang akan diuji cobakan yaitu LOA = 55 cm; B = 6,4 cm; D = 6,7 cm. Bahan model perahu terbuat dari triplek. Model dibuat dengan cara menyusun rangka triplek yang telah dibentuk dari half breadth plan dari setiap WL hingga ke sheer. Model perahu dalam penelitian ini mengikuti model perahu katir Palabuhanratu. Katir merupakan alat tambahan kestabilan, mencegah gerakan oleng yang berlebihan pada perahu. Namun pada perahu katir Palabuhanratu, katir merupakan alat kestabilan utama dan terpasang disebelah kanan dan kiri perahu. Katir tersebut disambung dengan dua buah lengan yang disebut buruyungan. Tanpa katir, perahu katir Palabuhanratu tidak dapat kembali pada posisi semula (unstable equilibrium). Dalam penelitian ini dilakukan pengujian dengan 2 cara yaitu : 1) perahu tanpa menggunakan katir kemudian, 2) perahu menggunakan katir. Hasil percobaan menunjukkan bahwa perahu tanpa menggunakan katir mengalami oleng yang sangat ekstrim sementara perahu dengan katir terpasang menunjukkan keseimbangan yang stabil. Sehingga dapat dikatakan model perahu percobaan sesuai dengan model perahu katir Palabuhanratu.
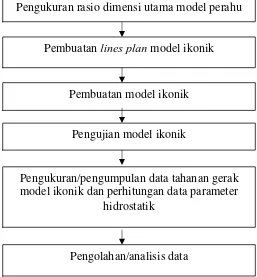
Gambar 2 Skema kegiatan penelitian uji tahanan gerak model perahu katir Palabuhanratu
Pengukuran rasio dimensi utama model perahu
Pembuatan lines plan model ikonik
Pembuatan model ikonik
Pengujian model ikonik
Pengukuran/pengumpulan data tahanan gerak model ikonik dan perhitungan data parameter
hidrostatik
3.4.1 Desain model ikonik perahu katir 1) Rencana Umum (General Arrangement)
Gambar rencana umum merupakan gambar yang memperlihatkan secara umum kelengkapan serta tata letak peralatan dalam perahu. Tata letak tersebut adalah letak alat tangkap, mesin, palkah ikan dan lainnya. Rencana umum pada penelitian ini ditinjau dari sudut pandang atas dan samping. Perahu katir Palabuhanratu tidak memiliki deck sehingga tidak memiliki palkah khusus untuk menyimpan hasil tangkapan maupun tempat dudukan mesin.
Di bawah ini merupakan gambar general arrangement model perahu katir Palabuhanratu dengan dimensinya.
6,4 cm
32 cm 55 cm 25 cm
[image:35.595.119.511.311.587.2]3 cm 6,7 cm
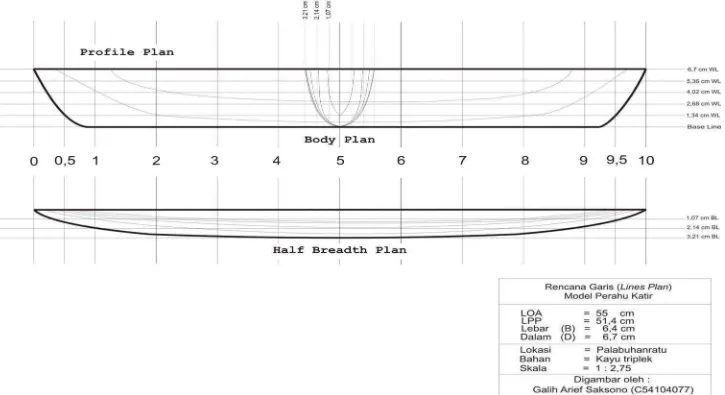
Gambar 3 General Arrangement model perahu katir Palabuhanratu 2) Rencana Garis (Lines Plan)
Dalam proses pembuatan, perahu katir tersebut dibangun tanpa perencanaan gambar ataupun perhitungan matematis sehingga pembuatan perahu hanya berdasarkan pengetahuan turun-temurun. Oleh karena itu perahu tersebut belum diketahui parameter hidrostatisnya.
untuk merancang bentuk dan ukuran model perahu sehingga skala yang digunakan merupakan perbandingan antara ukuran model perahu katir dengan ukuran gambar. Gambar lines plan tersebut terdiri dari :
1) Body plan adalah gambar rencana garis perahu dari arah depan (irisan melintang perahu tampak depan). Gambar ini menunjukkan bentuk badan perahu pada masing-masing ordinat. Ordinat 0 - 5 menunjukkan bentuk badan perahu dari after perpendicular (AP) pada buritan perahu hingga midship
(tengah perahu) dan ordinat 5 – 10 menunjukkan bentuk dari midship hingga
fore perpendicular (FP) pada haluan perahu. Dalam penelitian ini menggunakan model perahu double pointed sehingga dalam gambar terlihat hampir terdapat kesamaan antara haluan dengan buritan.
2) Profile plan merupakan gambar bentuk irisan memanjang perahu tampak samping. Dalam gambar ini ditunjukkan 6 garis horizontal yang merupakan garis water line. Garis horizontal paling bawah disebut base line. Garis selanjutnya merupakan 5 garis berturut-turut mulai dari water line terendah hingga tertinggi (draft). Ukuran jarak antar water line dapat ditentukan setelah tinggi draft diketahui. Hasil perhitungan menunjukkan ukuran water line yang digunakan yaitu 1,34 cm WL; 2,68 cm WL; 4,02 cm WL; 5,36 cm WL dan 6,7 cm WL. Water line yang terakhir merupakan draft model perahu yang digunakan dalam penelitian. Dalam gambar ini juga ditunjukkan posisi ordinat. Ordinat tersebut merupakan garis tegak yang membagi Load of water line (Lwl) menjadi 10 bagian. Garis tegak tersebut dapat digunakan untuk pembuatan gambar irisan perahu tampak atas (half breadth plan) dan gambar irisan perahu tampak depan (body plan). Dalam penelitian ini tinggi draft
yang digunakan adalah sama dengan depth, karena model perahu katir Palabuhanratu tidak memiliki lantai deck.
3.4.2 Konstruksi model
Dalam pembuatan model perahu katir, konstruksi model menggunakan
sandwich system, yaitu menyusun rangka breadth plan dari base line hingga ke
sheer. Rangka tersebut didempul untuk mendapatkan bentuk yang menyerupai perahu katir Palabuhanratu yaitu memiliki bentuk kasko perahu round bottom
pada bagian tengah perahu dan v bottom pada bagian haluannya. Permukaan badan hasil pendempulan lalu dicat sehingga permukaannya kedap air. Di bawah ini merupakan ilustrasi konstruksi model perahu katir pada penelitian ini.
Gambar 5 Ilustrasi konstruksi model perahu katir tampak samping dan atas sebelum pendempulan
[image:39.595.141.484.428.644.2]3.5 Pengolahan Data
Setelah data tersebut dikumpulkan, maka pengolahan data dapat dilakukan. Pengolahan data terdiri atas dua tahap, yaitu :
1) Pengolahan data rasio dimensi utama perahu.
Data rasio dimensi utama diperoleh dengan membandingkan beberapa data dimensi utama model perahu yang diteliti. Data tersebut diolah dengan pendekatan matematis agar mudah diinterpretasikan dan dibandingkan dengan standar yang ada, yaitu dengan mengunakan tabulasi dan grafik. Data yang digunakan meliputi rasio panjang (LPP) dengan lebar (B) dilambangkan LPP/B, rasio panjang (LPP) dengan dalam (D) dilambangkan LPP/D serta rasio panjang (LPP) dan dalam (D) dilambangkan dengan B/D. Sedangkan data dimensi utama yang digunakan dalam penelitian ini antara lain LOA (Length
Over All), LPP (Length of Perpendicular), LWL (Length of Water Line), D (Depth), B (Breadth) dan d (Draft).
2) Pengolahan data parameter hidrostatik perahu.
Data tersebut diolah dengan menggunakan perhitungan arsitek perkapalan. Hasil perhitungan tersebut akan memudahkan dalam pembuatan grafik karena nilai-nilai parameter hidrostatis dari perahu telah diketahui.
Rumus yang digunakan dalam perhitungan nilai hidrostatis perahu adalah sebagai berikut (Iskandar dan Novita, 1997):
a) Volume displacement (∇), dengan menggunakan metode Simpson I:
∇ = h/3 ( A0 + 4 A1 + 2A2 + ... + 4An + An-1 ) ……….. (1) Keterangan :
A = luas pada wl tertentu (m2)
h = jarak antar ordinat pada wl tertentu (m)
b) Ton displacement (∆) :
………. (2) Keterangan :
= densitas air tawar (1 ton/m3)
c) Water plane area (Aw), dengan menggunakan metode Simpson I :
Aw = h/3 ( Y0 + 4 Y1 + 2Y2 + ... + 4Yn + Yn-1 ) ………. (3)
Keterangan :
h = jarak antar ordinat pada wl tertentu (m) Y = luas water plane pada wl tertentu (m2)
d) Coeffecient of block (Cb) :
……….. (4)
Keterangan :
L = panjang perahu (m) B = lebar perahu terbesar (m) d = draft badan perahu (m)
e) Coeffecient of midship (C¤) :
……… (5) Keterangan :
A¤ = luas tengah perahu (m2) B = lebar perahu terbesar (m) d = draft badan perahu (m)
f) Coefficient of Waterplane (Cw) :
……….. (6)
Keterangan :
g) Coefficient of prismatic (Cp) :
……….. (7) Keterangan :
∇ = volume displacement (m3) A¤ = luas tengah perahu (m2) L = panjang perahu (m)
h) Coefficient verticalprismatic (CVP) :
……….. (8)
Keterangan :
∇ = volume displacement (m3 ) Aw = Water plane area (m2) d = draft badan perahu (m)
i) Ton per centimetre immersions (TPC) :
……….…. (9) Keterangan :
Aw = Water plane area (m2)
∇ = volume displacement (m3 )
δ = densitas air laut (1 ton/m3)
j) Jarak titik apung (KB) :
KB = 1/3 (2.5 x d -∇/Aw ) ……….. (10)
Keterangan :
d = draft badan perahu (m) Aw = Water plane area (m2)
KM = KB+BM ………. (11) Keterangan :
KB = Jarak lunas dengan titik apung (m) BM = Jarak titik apung ke metacentre (m)
l) Jarak titik apung ke metacenter (BM) :
……….… (12)
Keterangan : I = Momen inertia
∇= Volume displacement (m3)
m) Jarak titik apung ke titik metacenter longitudinal (BML) :
………. (13)
Keterangan :
IL = Inertia longitudinal
∇= Volume displacement (m3)
n) Jarak metacenter longitudinal (KML) :
KML = KB + BML ………. (14)
Keterangan :
KB = Jarak lunas dengan titik apung (m)
BML = Jarak titik apung ke titik metacenter secara longitudinal (m) 3) Pengolahan Data Tahanan Gerak Model Perahu Katir
Pengolahan data menggunakan pendekatan matematis yaitu dengan menghitung rata-rata dari nilai tahanan yang diperoleh dari 10 kali ulangan pada tiga tingkat kecepatan. Nilai rata-rata tersebut akan disajikan ke dalam bentuk tabel dan grafik agar mudah diinterpretasikan dan dianalisis.
Analisis data yang digunakan berupa deskriptif- numerik meliputi : 1) Analisis rasio dimensi utama
Analisis ini bertujuan untuk mengetahui karakteristik kemampuan perahu dalam melakukan olah gerak. Rasio dimensi utama yang digunakan meliputi perbandingan panjang dengan lebar (LPP/B), lebar dengan dalam (B/D), serta panjang dengan dalam (LPP/D). Nilai rasio LPP/B dapat menunjukkan besarnya tahanan gerak yang dimiliki model perahu, nilai rasio B/D dapat menunjukkan kestabilan model perahu sedangkan nilai LPP/D dapat menunjukkan kekuatan memanjang dari model perahu.
2) Analisis parameter hidrostatis
Dianalisis dengan metode numerik yang merupakan simulasi dari data yang diperoleh melalui perhitungan-perhitungan secara teoritis. Dalam memplotkan nilai parameter hidrostatis, digunakan 3 WL yang akan ditentukan setelah data terkumpul. Analisis ini digunakan untuk memplotkan nilai parameter hidrostatis kedalam kurva.
3) Analisis tahanan gerak
Hasil perhitungan disajikan kedalam bentuk grafik, dimana tingkat kecepatan sebagai variabel bebas dan tahanan gerak sebagai variabel tak bebasnya, grafik tersebut dapat menjelaskan perbandingan tahanan gerak di berbagai tingkat kecepatan model perahu. Kurva hasil percobaan eksperimental tersebut akan dibandingkan dengan kurva model simulasi metode Froude.
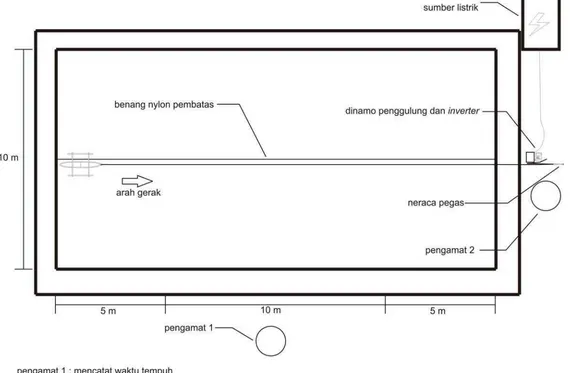
3.7 Uji Coba di Kolam Percobaan BDP
Model yang sudah dibuat diujicobakan di kolam percobaan BDP untuk mendapatkan nilai tahanan gerak pada tiga tingkat kecepatan. Ketiga tingkat kecepatan tersebut diatur inverter pada dinamo penggulung untuk menarik model perahu. Nilai tahanan gerak didapat dengan membaca besarnya gaya reaksi neraca pegas yang dikaitkan dengan katrol yang telah terhubung dengan dinamo penggulung dan haluan model perahu.
berukuran panjang 5 meter dan memliki fungsi sebagai jarak tempuh awal model perahu, pada bagian ini model perahu akan mendapat kesempatan tempuh mencapai kecepatan konstan dari posisi diam. Bagian kedua berukuran panjang 10 meter, pada bagian ini pengamat mulai menyalakan stopwatch ketika haluan model perahu memasuki batas awal bagian ini dan menentukan waktu tempuh (t) ketika haluan model perahu memasuki batas akhir. Ukuran kolam bagian kedua ini digunakan sebagai jarak tempuh model perahu (S). Pada bagian ini pula pengamat lainnya mencatat besarnya tahanan gerak perahu. Ketika model perahu memasuki bagian terakhir yang berukuran panjang 5 meter, dinamo penggulung dimatikan. Tujuannya agar model perahu tidak menabrak dinding kolam. Tabel di bawah ini digunakan untuk pengambilan data tahanan gerak pada masing-masing tingkat kecepatan model perahu.
Tabel 1 Data tahanan gerak pada tiga tingkat kecepatan linier model perahu
Kecepatan (m/s)
Ulangan V1 V2 V3
1 2 . . . 10 Rata-rata
Beberapa rumus yang digunakan dalam metode Froude agar antara model dengan prototype sebenarnya dianggap terdapat kesamaan geometris dan kinematis.
skala panjang
skala massa jenis spesifik skala kecepatan maju
skala massa
skala percepatan
faktor skala
Disini gaya gravitasi akan ambil bagian, karena gaya ini menentukan pembentukan gelombang. Dalam hal ini
g = percepatan karena gravitasi
= skala untuk percepatan karena gravitasi
Jika diinginkan kesamaan dinamis maka rasio dari gaya inersia dan gaya gravitasi yang manapun untuk model harus mempunyai harga yang sama dengan yang untuk skala penuh.
atau
dan Yang memberikan
dan
Atau
=
atau
=
=
F
nFnadalah angka Froude. Dengan adanya kesamaan kesamaan geometris dan
kinematis serta harga angka Foroude yang sama, maka gaya yang manapun yang diukur pada model dapat dikonversikan ke gaya yang bersangkutan pada skala penuh memakai skala gaya :
Berdasarkan hukum kesamaan dan hasil pengamatan mengenai pola gelombang yang ditimbulkan oleh berbagai model yang bentuknya sama tetapi ukurannya berbeda maka William Froude pada tahun 1868 menyatakan “hukum perbandingannya” sebagai berikut; “tahanan (sisa) berbagai kapal yang mempunyai kesamaan geometris berada dalam rasio dari kubik ukuran liniernya jika kecepatan berada dalam rasio akar kuadrat ukuran liniernya “. Kecepatan demikian itu disebut kecepatan yang bersangkutan.
Jika tahanan sisa dianggap tidak tergantung tahanan gesek maka percobaan model dapat dilakukan dengan cara berikut. Mengikuti hukum Froude untuk model berarti
dan masing- masing adalah kecepatan model dan kecepatan kapal dan adalah rasio skala. Gaya gravitasi kemudian direduksi ke suatu proporsi tertentu dan gaya vislositas ke proporsi lain. Hal ini tidak menimbulkan masalah apapun jika gaya viskositas baik untuk model maupun untuk kapal dapat dihitung kedua-duanya.
Tahanan total model diukur pada sejumlah harga kecepatan . Tahanan ini kemudian dipisahkan ke dalam dua bagian
adalah tahanan gesek model dan adalah tahanan sisa model. Jika telah dihitung maka harga tahanan sisa darat dihitung dengan menggunakan persamaan diatas. Komponen tahanan model ini dapat dikonversi dengan mengalikan skala gaya
Jika maka tahanan sisa akan menjadi
Dengan memakai asas yang sama dengan yang dipakai untuk menghitung tahanan sisa kapal , yaitu asas yang dipakai ketika menghitung , maka tahanan total kapal dapat dihitung dengan
=
=
4 HASIL DAN PEMBAHASAN
4.1 Desain Model Perahu
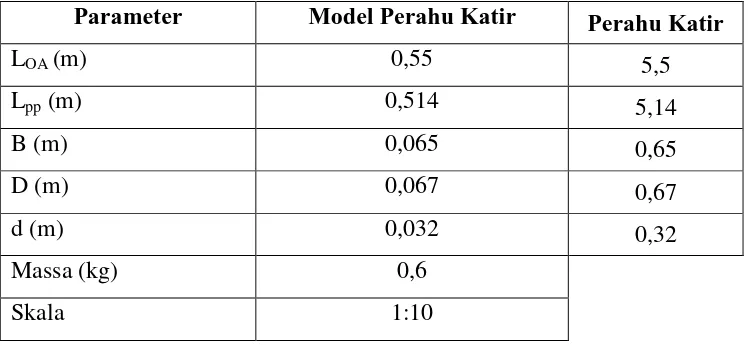
Salah satu tahapan yang penting dalam pembuatan perahu adalah mendesain. Hal ini diperlukan untuk mendapatkan bentuk perahu yang sesuai dengan lingkungan dan kebutuhannnya sehingga perahu dapat berolah-gerak dengan baik dan layak untuk beroperasi. Menurut Suhendra (1991) mendesain perahu diartikan sebagai proses penentuan spesifikasi dan menghasilkan berbagai gambar desain suatu obyek untuk keperluan pembuatan dan pengoperasian. Tahap awal dalam mendesain perahu adalah menentukan rasio dimensi utama perahu yang nantinya akan mempengaruhi bentuk dan ukuran perahu. Dimensi utama perahu antara lain LOA, Lpp, B, D, d. Spesifikasi ukuran dimensi utama, massa serta skala model perahu yang diteliti dapat dilihat pada Tabel 2 di bawah ini. Tabel 2 Ukuran dimensi utama model perahu katir pada penelitian uji
tahanan gerak perahu katir Palabuhanratu
Parameter Model Perahu Katir Perahu Katir
LOA (m) 0,55 5,5
Lpp (m) 0,514 5,14
B (m) 0,065 0,65
D (m) 0,067 0,67
d (m) 0,032 0,32
Massa (kg) 0,6
Skala 1:10
[image:51.595.126.500.402.575.2]mengkategorikan model perahu kedalam kelompok metode pengoperasian alat tangkap perahu ikan.
Di bawah ini merupakan Tabel yang menunjukkan rasio dimensi utama perahu ikan berdasarkan metode pengoperasiannya menurut penelitian yang dilakukan oleh Iskandar dan Pujiati (1995)
Tabel 3 Rasio dimensi utama perahu ikan berdasarkan metode pengoperasian alat tangkap yang ada di Indonesia
No Kelompok Perahu LPP/B LPP/D B/D
1 Encircling gear 2,6-9,3 4,55-17,43 0,56-5
2 Static gear 2,83-11,12 4,58-17,28 0,96-4,68
3 Towed gear 2,86-8,3 7,2-15,12 1,25-4,41
(sumber : Iskandar & Pujiati, 1995)
Tabel 4 Rasio dimensi utama model perahu dalam penelitian uji tahanan gerak model perahu katir Palabuhanratu
No Kelompok Perahu LPP/B LPP/D B/D
1 Model perahu penelitian 7,908 7,67 0,97
Data dari Tabel 3 dan Tabel 4 menunjukkan bahwa nilai dari ketiga rasio dimensi utama model perahu percobaan masih dalam rentang nilai-nilai dari ketiga rasio dimensi utama kelompok perahu encircling gear dan static gear. Dari data di atas juga menunjukkan bahwa nilai rasio dimensi utama model perahu percobaan tidak sesuai dengan nilai rasio dimensi utama kelompok perahu towed gear (nilai rasio dimensi utama B/D). Sehingga model perahu percobaan ini hanya sesuai untuk kelompok perahu dengan metode pengoperasian alat tangkap
encircling gear dan static gear.
[image:52.595.110.509.230.324.2] [image:52.595.116.506.378.422.2]Di bawah ini terdapat gambar yang membandingkan rasio dimensi utama model perahu dalam penelitian ini dengan rentang rasio dimensi utama pada metode pengoperasian encircling gear.
Lpp/B
Lpp/D
B/D
0 2 4 6 8 10 12 14 16 18
20 Nilai rasio batas atas encircling gear
Nilai rasio model perahu
Nilai rasio batas bawah encircling gear
[image:53.595.122.485.153.408.2]Rasio dimensi utama
Gambar 9 Nilai rasio dimensi utama model perahu pada rentang nilai kelompok perahu encircling gear
Pada Gambar 9 dapat dilihat rentang rasio utama perahu encircling gear. Jika diamati dengan rasio utama model perahu penelitian ini, maka ketiga nilai rasio tersebut masih berada dalam rentang rasio utama perahu encircling gear. Hal tersebut menunjukkan bahwa ukuran dimensi utama dari model perahu mengikuti pola perahu ikan di Indonesia dalam kelompok perahu encircling gear.
N
il
ai
r
as
Di bawah ini terdapat gambar yang membandingkan rasio dimensi utama model perahu dengan rentang rasio dimensi utama pada metode pengoperasian static gear.
Lpp/B
Lpp/D
B/D
0 2 4 6 8 10 12 14 16 18
20 Nilai rasio batas atas static gear
Nilai rasio model perahu Nilai rasio batas bawah static gear
Rasio dimensi utama
Gambar 10 Nilai rasio dimensi utama model perahu pada rentang nilai kelompok perahu static gear
Pada Gambar 10 dapat diamati bahwa rasio dimensi utama model perahu berada dalam rentang nilai rasio dimensi utama pada kelompok perahu static gear. Sehingga dapat diambil kesimpulan bahwa model perahu yang diujicobakan memiliki kesesuaian dengan kelompok perahu static gear.
N
il
ai
r
as
[image:54.595.123.481.155.404.2]Bila dibandingkan dengan kelompok perahu towed gear, rasio dimensi utama model perahu percobaan terdapat sedikit ketidaksesuaian dalam nilai rasio B/D. Pada model perahu percobaan memliki nilai yang lebih kecil dari nilai rentang batas bawah rasio dimensi utama kelompok perahu towed gear. Di bawah ini terdapat gambar yang membandingkan rasio dimensi utama model perahu dengan rentang rasio dimensi utama pada kelompok perahu towed gear.
Lpp/B
Lpp/D
B/D
0 2 4 6 8 10 12 14
16 Nilai rasio batas atas towed gear
Nilai rasio model perahu Nilai rasio batas bawah towed gear
Rasio dimensi utama
Gambar 11 Nilai rasio dimensi utama model perahu pada rentang nilai kelompok perahu towed gear
Pada Gambar 11 menjelaskan bahwa model perahu tidak memiliki kemampuan untuk melakukan metode towed gear.
4.2 Nilai Parameter Hidrostatis Perahu Katir
Dalam tahap mendesain, parameter hidrostatis juga dapat diketahui nilai perhitungannya. Perhitungan tersebut dapat dilakukan setelah lines plan telah selesai dibuat. Parameter hidrostatis merupakan suatu ukuran/nilai yang menggambarkan perahu secara statis serta kelayakan desain sebuah perahu. Dalam penelitian ini digunakan 3 kolom water line pada model perahu yaitu 1,34 cm WL; 4,02 cm WL dan 6,7 WL cm.
[image:55.595.121.482.217.469.2]Volume displacement perahu (∇) merupakan nilai yang menunjukkan volume badan perahu yang nilainya sama dengan nilai volume air laut yang dipindahkan saat perahu terbenam pada posisi water line tertentu. Nilai volume displacement perahu pada saat water line setinggi depth yaitu sebesar 0,0014 m3 (Tabel 7). Nilai ini berfungsi untuk mengestimasi volume muatan yang dapat ditampung oleh perahu.
Ton displacement perahu (∆) merupakan nilai yang menunjukkan beban/massa badan perahu pada posisi water line tertentu. Massa badan perahu pada kondisi water line setinggi draft yaitu sebesar 0,0013 ton (Tabel 7). Besarnya nilai ton displacement berbanding lurus dengan volume displacement. Sehingga kurva volume displacement selalu bersinggunan dengan kurva ton displacement
(Gambar 12).
Water area perahu (Aw) merupakan nilai yang menunjukkan luas area perahu pada posisi water line tertentu secara horizontal-longitudinal. Dalam penelitian ini menggunakan metode Simpson I untuk perhitungan. Luas area perahu pada saat water line setinggi depth yaitu sebesar 0,0276 m2 (Tabel 7). Semakin besar nilai water area maka perahu memliki kemampuan menerima distribusi mutan secara horizontal semakin besar pula.
Midship area perahu (A⊗) merupakan nilai yang menunjukkan luas irisan melintang dari bagian tengah perahu pada posisi water line tertentu. Luas perahu di bagian tengah secara melintang pada saat water line setinggi depth yaitu sebesar 0,0031 m2 (Tabel 5).
Ton percentimeter immersion perahu (TPC) merupakan nilai yang menunjukkan jumlah beban/massa yang dibutuhkan oleh perahu untuk merubah draft sebesar 1 cm. Besarnya massa yang dibutuhkan untuk merubah posisi draft pada saat water line setinggi depth sebesar 1 cm yaitu 0,0003 ton. Nilai ini berfungsi untuk mengestimasi massa maksimum yang dapat ditolerir perahu.
adalah Cb. Perahu dikatakan gemuk apabila nilai Cb mendekati 1 dan sebaliknya dikatakan ramping jika mendekati 0.
Di bawah ini merupakan tabel yang menunjukkan nilai koefisien bentuk perahu berdasarkan metode pengoperasian alat tangkap yang ada di Indonesia menurut penelitian yang dilakukan oleh Iskandar dan Pujiati (1995) dan tabel koefisien bentuk perahu hasil perhitungan model perahu yang digunakan dalam penelitian ini. Hasil perhitungan pada model perahu merupakan pengukuran koefisien bentuk pada saat water line setinggi depth.
Tabel 5 Nilai koefisien bentuk perahu berdasarkan metode pengoperasian alat tangkap yang ada di Indonesia
Sumber : Iskandar dan Pujiati (1995)
Tabel 6 Nilai koefisien bentuk perahu hasil pengukuran model perahu yang digunakan dalam penelitian
Data dari Tabel 6 menunjukkan bahwa hampir seluruh koefisien bentuk dari model perahu yang digunakan dalam penelitian berada di dalam rentang koefesien bentuk perahu acuan (Tabel 5). Hal ini mendeskripsikan bahwa model perahu yang digunakan dalam penelitian ini mengikuti koefesien bentuk perahu yang pada umumnya digunakan di Indonesia. Hasil perhitungan parameter hidrostatis model perahu disajikan pada Tabel 7, nilai tersebut diinterpretasikan dengan kurva hidrostatis pada Gambar 12.
Kelompok
perahu Cb Cp Cvp Cw
encircling gear 0,56 - 0,67 0,60 - 0,79 0,68 - 0,86 0,78 - 0,88 0,84 - 0,96
static gear 0,39 - 0,70 0,56 - 0,80 0,53 - 0,82 0,65 - 0,86 0,63 - 0,91
towed gear 0,46 - 0,6 0,5 - 0,62 0,60 – 0,85 0,66 - 0,77 0,69 - 0,89
Kelompok perahu Cb Cp Cvp Cw
model perahu
penelitian 0,5757 0,7692 0,7133 0,8071 0,7484
⊗ C
[image:57.595.112.506.283.368.2]Tabel 7 Nilai hidrostatis model perahu katir
No. Parameter 1,34 cm WL 4,02 cm WL 6,7 cm WL
1 Volume displacement (m^3) 0,0001 0,0006 0,0013
2 Ton displacement (ton) 0,0001 0,0006 0,0013
3 Water area (Aw) (m^2) 0,0132 0,0228 0,0276
4 Midship area (Ao) (m^2) 0,0003 0,0015 0,0031
5 Ton Per Centimeter (TPC) 0,0001 0,0002 0,0003
6 Coefficient block (Cb) 0,4829 0,5554 0,5757
7 Coefficient prismatic (Cp) 0,7481 0,7801 0,7692
8 Coefficient vertical prismatic (Cvp) 0,6353 0,6860 0,7133
9 Coefficient waterplane (Cw) 0,7601 0,8096 0,8071
10 Coefficient midship (Co) 0,6455 0,7119 0,7484
11 Longitudinal Centre Buoyancy (LCB) (m) 0,0015 0,0013 0,0014
12 Jarak KB (m) 0,0083 0,0243 0,0399
13 Jarak BM (m) 0,0105 0,0072 0,0055
14 Jarak KM (m) 0,0188 0,0315 0,0454
15 Jarak BML (m) 1,4972 0,6024 0,3848
16 Jarak KML (m) 1,5056 0,6267 0,4247
17 Jarak KG (m) 0,0105 0,0072 0,0055
18 Jarak KG/D (m) 0,1563 0,1074 0,0816
[image:58.842.68.716.108.513.2]4.3 Wetted Surface Area (luas permukaan basah badan perahu)
Dalam penelitian ini sebelum melakukan pengambilan data tahanan gerak perahu perlu dilakukan pengukuran luas permukaan basah badan perahu (wetted surface area). Luas permukaan basah merupakan salah satu besaran yang nantinya akan digunakan dalam persamaan matematis pada metode Froude untuk mengestimasi besarnya tahanan gesek (RF) pada model perahu. Tahap awal yang diperlukan dalam pengukuran data ini adalah penentuan draft perahu. Penentuan
draft tersebut dapat diketahui dengan cara mengapungkan perahu di kolam percobaan dalam keadaan diam (statis) hingga draft perahu dapat terlihat. Tahap berikutnya dilakukan secara manual yaitu dengan memplotkan kertas millimeter
[image:60.595.168.460.353.507.2]block pada permukaan perahu yang terendam air. Hasil perhitungan luas permukaan yang didapat yaitu 655,1 cm2. Di bawah ini merupakan ilustrasi pengukuran luas permukaan basah.
Gambar 13 Ilustrasi proses pengukuran WSA
4.4 Tahanan Gerak Model Perahu
Gambar


Dokumen terkait
Hal ini menunjukan bahwa sebelum kecepatan kapal 5,5199 knots gaya dorong (forward force) lebih besar dari hambatan yang dihasilkan oleh kapal sehingga kapal dengan
Dari hasil analisis tahanan dan momen yang diterima trimaran, dapat diketahui bahwa tahanan trimaran semakin bertambah dengan naiknya kecepatan kapal dan cenderung
Dari hasil analisis tahanan dan momen yang diterima trimaran, dapat diketahui bahwa tahanan trimaran semakin bertambah dengan naiknya kecepatan kapal dan cenderung
Pada kondisi sarat kosong untuk kecepatan maksimum 6 knot, tahanan total model mencapai 7,6 N yang berkorelasi dengan tahanan kapal sebesar 4,77 kN.. Pada sarat penuh, pengujian
Pada kecepatan tinggi saat 215,6 watt ,tahanan bentuk serta tahanan gesek dari penggunaan water tunnel yang dilengkapi pengarah masih lebih besar dibandingkan daya dorong
Hasil penelitian ini menunjukkan bahwa: (1) stabilitas dari kapal model 5 GT relatif lebih stabil dari pada 30 GT; (2) kapal model 5 GT memiliki nilai tahanan total lebih besar
Grafik resistance total kapal katamaran tipe Asimetris Berdasarkan hasil yang terdapat pada Tabel 4 dan 5, maka menunjukkan bahwa nilai tahanan total kapal untuk kecepatan 10 knot
Penentuan nilai tahanan model kapal yang menggunakan bulbous bow pada tiap variasi kecepatan... 203 Berdasarkan grafik diatas, nilai tahanan model kapal tanpa bulbous bow terjadi pada
