SISTEM KONTROL KENDALI BERBASIS GPS DAN
MIKROKONTROLER ARDUINO MEGA UNTUK
ALAT PENYEMPROT PADI TIPE BALON
MARCHAWANDA ADITYA PRIHADIAT
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Sistem Kontrol Kendali Berbasis GPS dan Arduino Mega untuk Alat Penyemprot Padi Tipe Balon adalah benar karya saya dengan arahan dari Dr Ir Radite Praeko A.S, M.Agr dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
ABSTRAK
MARCHAWANDA ADITYA PRIHADIAT. Sistem Kontrol Kendali Berbasis GPS dan Mikrokontroler Arduino Mega Untuk Penyemprot Padi Tipe Balon. Dibimbing oleh RADITE PRAEKO AGUS SETIAWAN.
Penyemprotan pupuk dan pestisida merupakan kegiatan pemeliharaan padi yang sangat memengaruhi produktivitas tanaman padi. Kegiatan ini umumnya menggunakan alat penyemprot tipe gendong. Mekanisme penyemprotan dilakukan oleh petani dengan berjalan diantara alur tanam padi. Hal ini akan merusak alur tanam dan petani akan mengalami kesulitan berjalan di lahan persawahan. Hal tesebut dapat diatasi dengan menggunakan sistem penyemprot melalui udara (aerial sprying). Penyemprotan ini sudah dilakukan dengan menggunakan pewasat terbang. Akan tetapi penggunaan pesawat memiliki kelemahan yaitu kebisingan, biaya yang mahal, dan adanya aturan untuk pesawat tidak terbang rendah di pulau jawa karena banyak kabel bertegangan tinggi. Solusi lain yang mungkin dilakukan yaitu dengan menggunakan balon yang dilengkapi sistem kontrol kendali. Pada penelitian ini gas hidrogen dipilih karena memiliki daya angkat yang lebih besar dibandingkan dengan gas helium atau balon udara panas. Sistem kontrol balon mengadopsi sistem kontrol multikopter (quad copter). Sistem kontrol tersebut dilengkapi dengan GPS sebagai modul pada flying control (Dji Naza). Pengendalian ini dilengkapi indikator ketinggian yaitu Arduino yang dihubungkan dengan sensor ultrasonik. Penelitian ini menggunakan balon dengan volume 221 m3 dengan daya angkat 14.2 kg pada ketinggian 1.5 meter. Sistem kontrol kendali mampu mengendalikan alat penyemprot tipe balon dengan kecepatan maju 1.16 m/s dan waktu berbelok 20 s pada kecepatan angin 1.13 m/s. Kata kunci: arduino, dji naza, sistem kontrol kendali, dan quadcopter.
ABSTRACT
MARCHAWANDA ADITYA PRIHADIAT. Control System Based on GPS And Arduino Mega Microcontroller For Machine Spraying Rice Field Balloon Type. Supervised by RADITE PRAEKO AGUS SETIAWAN.
used, because it’s stable when flying at low altitude and easy to control. A control
equipped with level indicator is Arduino connected with ultrasonic sensors. This study used a balloon with a volume of 221 m3 with a lifting capacity of 14. 2 kg at a height of 1.5 meters. Control system capable of controlling protype of balloon type spraying with forward speed 1.16 m / s and a 20 s turn on the wind velocity 1.13 m / s.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik
pada
Departemen Teknik Mesin dan Biosistem
SISTEM KONTROL KENDALI BERBASIS GPS DAN
MIKROKONTROLER ARDUINO MEGA UNTUK
ALAT PENYEMPROT PADI TIPE BALON
MARCHAWANDA ADITYA PRIHADIAT
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
Judul Skripsi : Sistem Kontrol Kendali Berbasis GPS dan Mikrokontroler Arduino Mega untuk Alat Penyemprot Padi Tipe Balon
Nama : Marchawanda Aditya Prihadiat NIM : F14100133
Disetujui oleh
Dr Ir Radite Praeko Agus Setiawan, M.Agr Pembimbing Akademik
Diketahui oleh
Dr Ir Desrial, M.Eng Ketua Departemen
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas
segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Maret 2014 lalu ini ialah perancangan, dengan judul Sistem Kontrol Kendali Berbasis GPS dan Mikrokontroler Arduino Mega untuk Alat Penyemprot Padi Tipe Balon.
Terimakasih penulis ucapkan kepada Orang tua dan keluarga besar yang telah mendukung penuh dalam penelitian ini baik dari segi moral dan biaya. Kemudian penulis berterimakasih kepada Dr Ir Radite Praeko A.S, M.Agr. selaku dosen pembimbing yang telah memberikan bimbingan serta dukungan selama proses penelitian dan pembuatan skripsi. Ucapan terimakasih juga penulis sampaikan kepada Dr Ir I Dewa Made S, M.Agr Dan Dr Ir Mohammad Solahudin, M.Si. selaku dosen penguji ujian skripsi, serta kepada Dr Ir I Wayan Astika, M.Si dan seluruh dosen pengajar khususnya di Departemen Teknik Mesin dan Biosistem. Selanjutnya ucapan terimakasih diberikan kepada Rizki Aidil, Danang dan teman-teman TMB 47 yang telah membantu dalam proses perakitan, pengambilan data dan memberi dukungan untuk penyelesain tugas akhir dan yang terakhir penulis berterimakasih kepada Pengungsian 17 yang telah membantu mengoreksi dan memberi semangat kepada penulis saat menyusun skripsi ini. Semoga karya ilmiah ini bermanfaat.
Bogor, Februari 2015
DAFTAR ISI
DAFTAR TABEL vi
DAFTAR GAMBAR vi
DAFTAR LAMPIRAN vi
PENDAHULUAN 1
Latar Belakang 1
Perumusan Masalah 2
Tujuan Penelitian 2
Ruang Lingkup Penelitian 2
TINJAUAN PUSTAKA 2
Quad Copter 3
Flying control 4
Mikrokontroler 4
Arduino Mega 5
Sensor Ultrasonik 6
METODE 7
Waktu dan Tempat Penelitian 7
Alat dan Bahan 7
Metode Penelitian 8
Pengolahan Data 14
HASIL DAN PEMBAHASAN 15
SIMPULAN DAN SARAN 21
Simpulan 21
Saran 22
DAFTAR PUSTAKA 22
LAMPIRAN 24
DAFTAR TABEL
Hasil pengukuran kecepatan angin 19
12 Hasil pengujian gerak maju 19
13 Hasil uji belok 20
14 Hasil uji tahanan angin 20
15 Hasil uji tahanan motor 20
16 Hasil uji rpm saat berbelok 21
17 Hasil pengukuran awal kecepatan angin 24
DAFTAR GAMBAR
6 Setting remote tahap kedua, tampilan awal (a) dan tampilan akhir(b) 10 7 Setting remote tahap ketiga, tampilan awal (a) dan tampilan akhir(b) 10
8 Penentuan posisi motor 11
9 Kalibrasi Dji Naza dengan remote kendali 11
10 Penentuan kecepatan motor 12
11 Sistem indikator ketinggian 12
12 Alur pengendalian 13
13 Foto balon dengan kelengkapan tali 15
14 Spesifikasi balon dengan tali 15
15 Foto penggabungan sistem kontrol dengan frame 17
16 Foto remote control (RC) Turnigy 9XR 27
17 Foto balon 28
18 Foto pengambilan data waktu gerak maju 29
19 Foto pengambilan data waktu belok 29
20 Pemrograman pada Arduino Mega 31
21 Hasil pembacaan sensor ultrasonik (a) pengulangan pertama (b) pengulangan kedua
DAFTAR LAMPIRAN
1 Pengolahan Data 24
2 Spseifikasi Flying control Dji Naza 26
3 Spesifikasi Remote Control (RC) 27
4 Spesifikasi Balon 28
5 Foto pada saat pengujian 29
6 Gambar rangka penyemprot 30
PENDAHULUAN
Latar Belakang
Indonesia merupakan salah satu negara yang memiliki lahan sawah terbesar di Asia Tenggara dengan luas 13 769 913 ha, namun hal ini tidak membuat Indonesia menjadi negara pengekspor beras melainkan negara pengimpor beras dengan produktivitas padi sebesar 5 146 kg/ha (BPS 2013). Hal ini dikarenakan oleh beberapa faktor seperti rendahnya kualitas bibit dan pupuk, cuaca buruk, hama, dan buruknya penanganan pada pemeliharaan tanaman padi sehingga produktivitas padi rendah. Pemeliharaan padi khususnya pada penyemprotan pupuk dan pestisida menjadi salah satu penyebab rendahnya produktivitas padi karena pada saat proses penyemprotan berlangsung petani mengalami kesulitan untuk berjalan di lahan persawahan, hal ini disebabkan permukaan sawah yang tidak terkonsolidasi, sehingga secara tidak sengaja petani merusak alur tanam dan menginjak tanaman padi.
Solusi dari permasalahan tersebut yaitu menerapkan sistem penyemprot yang mampu beroperasi melalui udara. Sistem penyemprotan melalui udara sudah dilakukan pada perkebunan tebu dan perkebunan kelapa sawit. Sistem penyemprotan udara konvensional umumnya menggunakan pesawat terbang (fiola 2003), sehingga sistem penyemprotan udara ini tidak dapat digunakan pada tanaman padi. Hal ini dikarenakan biaya yang dibutuhkan terlalu mahal dan pesawat tidak mampu menjaga kestabilan pada ketinggian 1 m – 2 m. Disamping itu terdapat aturan bahwa pesawat tidak boleh terbang dengan ketinggian dibawah 50 m karena kebisingan peasawat akan mengganggu penduduk di sekitar lahan sawah dan banyaknya kabel bertegangan tinggi.
Alternatif lain untuk melakukan penyemprotan melalui udara dengan menggunakan balon sebagai pengangkut pestisida atau pupuk yang dilengkapi dengan sistem penyemprot dan sistem kontrol kendali. Balon memiliki daya angkat yang besar, namun tergantung pada gas yang mengisi balon dan volume balon itu sendiri sehingga mampu mengangkat berbagai benda seperti contoh balon udara yang digunakan untuk wisata. Hal ini membuktikan bahwa balon dapat digunakan untuk mengangkut pestisida atau pupuk pada penyemprotan udara. Kemudian, sistem kontrol yang digunakan pada balon umumnya hanya mampu mengendalikan balon dengan radius 1 m – 2 m dan kontrol tersebut harus dilakukan pada ruang tertutup seperti contoh pengendalian balon zeppelin sebagai media promosi.
2
Global Position System (GPS). Selain sistem kontrol kendali, teknologi pada mikrokontroler juga mengalami perkembangan seperti pada robot yang sering dikonteskan (Taufiq 2010).
pada penelitian ini, peneliti membangun sistem kontrol kendali pada alat penyemprot yang berbasis balon udara untuk menyemprotkan pupuk cair atau pestisida. Sistem kontrol kendali ini mengadopsi sistem kontrol pada multikopter yang dilengkapi GPS pada flying control dan mikrokontroler yang dihubungkan pada sensor jarak sebagai indikator ketinggian.
Perumusan Masalah
Operasi penyemprotan di lahan sawah sulit dilakukan karena lahan sawah tidak mempunyai lapisan keras sehingga alat-alat konvensional berbasis traktor sulit untuk melakukan pemeliharaan tanaman padi seperti untuk penyemprotan pupuk atau pestisida, maka diperlukan alat penyemprot yang pengoprasiannya menggunakan prinsip balon udara dan quad copter.
Tujuan Penelitian
Tujuan penelitian ini adalah merancang dan menguji sistem kontrol kendali berbasis GPS dan mikrokontroler Arduino Mega untuk alat penyemprot padi tipe balon dengan pengendalian jarak jauh menggunakan remote control (RC).
Ruang Lingkup Penelitian
Penelitian ini hanya dibatasi pada pengandalian alat penyemprot padi tipe balon untuk maju dan berbelok dengan menggunakan sistem pengendalian pada multikopter yang dilengkapi dengan mikrokontroler Arduino Mega yang dihubungkan dengan sensor ultrasonik sebagai indikator ketinggian. Selain itu dilakukan juga perhitungan secara numerik menggunakan Microsoft Excel untuk menghitung gaya drag dari udara yang menjadi gaya penghambat gerakan maju dan berbelok dari alat penyemprot padi tipe balon tersebut.
TINJAUAN PUSTAKA
Konsep dasar sistem menurut Kristanto (2002) adalah kumpulan elemen-elemen yang saling terkait dan berkerja sama untuk memproses dan mengolah masukan sampai menghasilkan keluaran yang diinginkan. Suatu sistem yang baik harus mempunyai tujuan dan sasaran yang tepat karena hal itu akan sangat menentukan dalam mendefinisikan masukan yang dibutuhkan, proses yang akan dilakukan, dan keluaran yang akan dihasilkan.
3 kendali yang dilakukan penuh oleh operator, sedangkan sistem kontrol otomatis merupakan kebalikan dari sistem kontrol manual yaitu suatu sistem pengendalian terhadap suatu alat yang digunakan untuk melakukan pekerjaan secara mandiri tanpa operator. Sistem kontrol semi-otomatis adalah sebuah sistem kendali pada suatu alat yang bekerja secara otomatis namun operator tetap mengoperasikan alat tersebut (Taufiq 2010). Pada sistem ini operator dapat mengarahkan alat sewaktu-waktu jika terjadi kendala ataupun kondisi cuaca seperti contoh pada mengendalian multikopter saat pengambilan gambar di udara.
Quad Copter
Quad copter adalah pesawat tanpa awak yang memilki potensi untuk lepas landas, terbang, terbang bermanuver, dan mendarat di daerah yang sempit serta memilki mekanisme kontrol sederhana. Quad copter memilki sistem kompleks yang tidak stabil dan dapat menjadi sulit untuk terbang tanpa embeded system control. Kestabilan terbang pada quad copter sangatlah penting agar pemanfatanya dapat maksimal. Pengendalian quad copter dapat bergerak terbang stabil dengan mengunakan metode kontrol optimal Linier Quadratic Regulator (LQR).
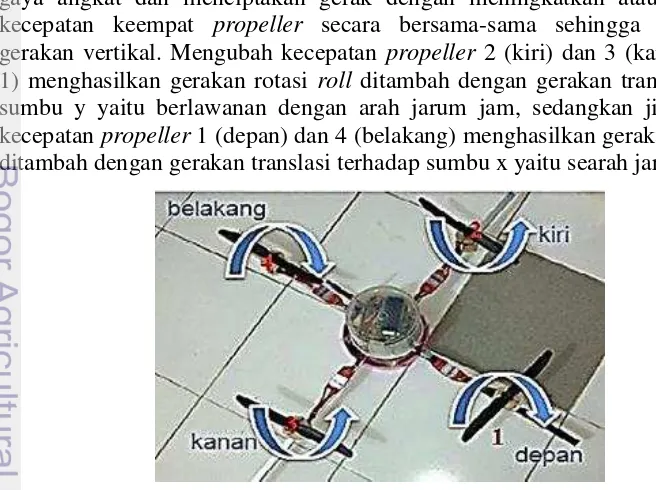
Pergerakan Quad copter
Teknologi yang terdapat pada quad copter ini adalah sinkronisasi antara keempat rotor yang dikonfigurasikan dalam bentuk frame plus (+). Pada rotor depan dan belakang berputar searah jarum jam, sedangkan rotor sebelah kanan dan kiri bergerak berlawanan arah jarum jam. Quad copter dapat melakukan take of dan landing secara vertikal.
Dua pasang propeller (1,4) dan (2,3) pada Gambar 1 berputar dengan arah yang berlawanan. Jika memvariasikan kecepatan rotor, maka dapat mengubah gaya angkat dan menciptakan gerak dengan meningkatkan atau menurunkan kecepatan keempat propeller secara bersama-sama sehingga menghasilkan gerakan vertikal. Mengubah kecepatan propeller 2 (kiri) dan 3 (kanan) (Gambar 1) menghasilkan gerakan rotasi roll ditambah dengan gerakan translasi terhadap sumbu y yaitu berlawanan dengan arah jarum jam, sedangkan jika mengubah kecepatan propeller 1 (depan) dan 4 (belakang) menghasilkan gerakan rotasi pitch ditambah dengan gerakan translasi terhadap sumbu x yaitu searah jarum jam.
4
Flying control
Flying control adalah suatu alat pengatur penyebaran arus menuju ESC (electric speed control) dan motor pada sebuah multikopter agar putaran motor dapat distabilkan serta dapat dikendalikan berdasarkan arah yang diinginkan. Pada flying control terdapat mikrokontroler yang berfungsi sebagai sistem gyroscope (sensor posisi) sehingga mikrokontroler tersebut dapat menjaga kestabilan dari perubahan sudut kemiringan ketika keadaan armed (stabil pada saat terbang). Pada umumnya flying control mikrokontroler yang digunakan Atmega324. Flying control HK KK 2.0 adalah mikrokontroler menggunakan ATmega324, yang dapat di program dengan bantuan program code vision AVR sebagai compiler bahasa c. Flying control ini terintegrasi terhadap sistem kendali dengan menggunakan remote kontrol. Flying control ini dapat dikendalikan dengan remot 6 chanel, 9 chanel dan 12 chanel. Chanel adalah jumlah dari suatu output yang akan dikontrol. Disamping itu terdapat flying control yang sering digunakan untuk pengendalian pada multikopter adalah Dji Naza. Flying control ini banyak digunakan karena komponen pengisi dari Dji Naza ini telah dilengkapi GPS dan module GPS. GPS pada Dji Naza digunakan untuk safety dan untuk menjaga kestabilan yang dibantu oleh sensor gyroscope apabila angin kencang menggangu dari terbang multikopter dan mengembalikan ke set point jika baterai akan habis secara otomatis yang disebut Return To Home (RTH) (Daniel 2012).
Mikrokontroler
Pengendali mikro (microcontrol) adalah sistem mikroprosesor lengkap yang terkandung di dalam sebuah chip. Mikrokontroler berbeda dari mikroprosesor serba guna yang digunakan dalam sebuah personal computer karena sebuah mikrokontroler umumnya telah berisi komponen pendukung sistem minimal mikroprosesor, yaitu memori dan interface I/O. Pada mengontrol robot, digunakan mikrokontroler dengan pertimbangan faktor ukuran yang relatif kecil dengan sistem sederhana seperti pada Gambar 2. Pada prinsipnya mikrokontroler pada mikroprosesor yang diprogram dengan bahasa assembly dan dirancang sebagai pengendali bukan untuk komputasi. Kontroler adalah rangkaian elektronik berbasis mikroprosesor yang berfungsi sebagai pengatur seluruh komponen dalam membentuk fungsi kerja.
5 Mikroprosesor dan mikrokontroler mengimplementasikan suatu komputasi pada hardware yang tetap. Interface semacam keyboard,disket, atau printer yang umumnya ada pada sebuah komputer pribadi justru tidak ada pada sistem mikrokontroler. Sistem mikrokontroler lebih banyak melakukan pekerjaan-pekerjaan sederhana yang penting seperti mengendalikan motor, saklar, resistor variabel, atau perangkat elektronik lain. Satu-satunya bentuk interface yang ada pada sebuah sistem mikrokontroler hanyalah sebuah LED, bahkan ini pun bisa dihilangkan jika tuntutan konsumsi daya listrik mengharuskan demikian.
Mikroprosesor adalah unit pengendali pusat dari interface. Mikroprosesor membawa perintah-perintah yang disimpan di RAM dan di EPROM. Proses ini mempunyai dua mode yaitu mode aktif dan mode pasif. Ditinjau dari segi arsitekturnya, mikroprosesor hanya merupakan single chip Central Processing Unit (CPU), sedangkan mikrokontroler dalam IC-nya selain CPU juga terdapat device lain yang memungkinkan mikrokontroler berfungsi sebagai suatu single chip computer. Dalam sebuah IC mikrokontroler telah terdapat ROM, RAM, EPROM, serial interface dan parallel interface, timer, interrupt control, konverter analog ke digital, dan lainnya (tergantung feature yang melengkapi mikrokontroler tersebut). Sedangkan dari segi aplikasinya, mikroprosessor hanya berfungsi sebagai CPU yang menjadi otak komputer, sedangkan mikrokontrol, dalam bentuknya yang kecil, pada umumnya ditujukan untuk melakukan tugas yang berorientasi kontrol pada rangkaian yang membutuhkan jumlah komponen minimum dan biaya rendah (low cost) (Dian 2012).
Arduino Mega
Arduino adalah pengendali mikro single-board yang bersifat open source, diturunkan dari wiring platform dan dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang. Hardware-nya memiliki prosesor Atmel AVR dan software yang digunakan memiliki bahasa pemrograman sendiri. Arduino yang banyak digunakan antara lain Arduino Uno, Arduino Duemilanove, dan Arduino Mega. Penggunaan Arduino tergantung dengan jumlah sistem yang akan dikontrol. Untuk pengontrolan dalam jumlah banyak pada suatu sistem menggukan Arduino Mega.
6
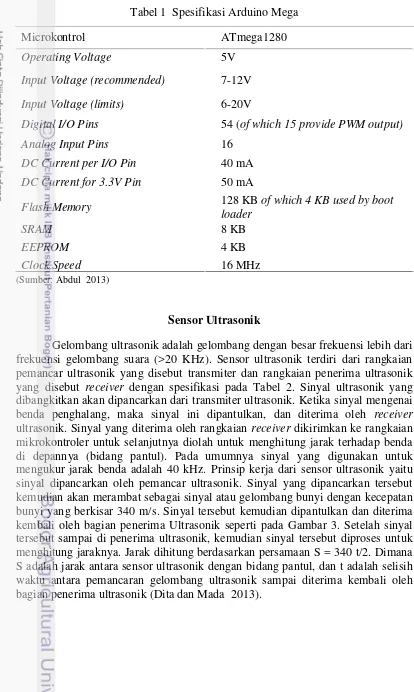
Tabel 1 Spesifikasi Arduino Mega
Microkontrol ATmega1280
Operating Voltage 5V Input Voltage (recommended) 7-12V Input Voltage (limits) 6-20V
Digital I/O Pins 54 (of which 15 provide PWM output) Analog Input Pins 16
7
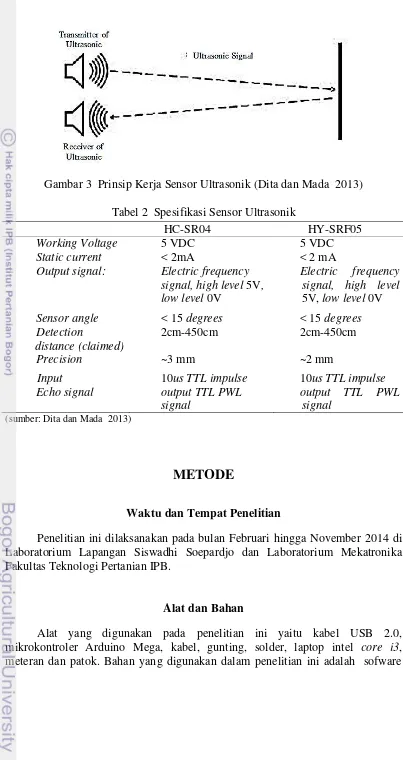
Gambar 3 Prinsip Kerja Sensor Ultrasonik (Dita dan Mada 2013) Tabel 2 Spesifikasi Sensor Ultrasonik
HC-SR04 HY-SRF05 Echo signal output TTL PWL
signal
output TTL PWL signal
(sumber: Dita dan Mada 2013)
METODE
Waktu dan Tempat Penelitian
Penelitian ini dilaksanakan pada bulan Februari hingga November 2014 di Laboratorium Lapangan Siswadhi Soepardjo dan Laboratorium Mekatronika Fakultas Teknologi Pertanian IPB.
Alat dan Bahan
8
arduino 5.01, flying control (Dji Naza), motor brushless, ESC, propeller, receiver remote, dan remote kendali.
Metode Penelitian Perumusan Ide Rancangan
Perumusan ide rancangan dimulai dengan menentukan komponen yang digunakan untuk membangun sistem kontrol pada alat penyemprot padi tipe balon dengan menggunakan sistem kontrol kendali quad coter. Pada penelitian ini dilakukan pemilihan motor brushless berdasarkan besarnya gaya drag yang terjadi pada benda terbang dan gaya hambat yang dihasilkan dari perputaran propeller. Pada pemilihan motor, gaya drag yang digunakan yaitu luas permukaan frame dan balon yang berinteraksi dengan udara. Menurut Agus (2010) cara menghitung gaya drag berdasarkan bentuk permukaan yang bersinggungan langsung dengan udara seperti pada persamaan 1 berikut:
d v2 d2A (1)
Keterangan:
Fd : Gaya drag (N) Cd : Koefisien drag
: Massa jenis udara ( 1.2 kg / m3)
v : Kecepatan udara (m / s)
A : Luas penampang yang dilewati udara (m2).
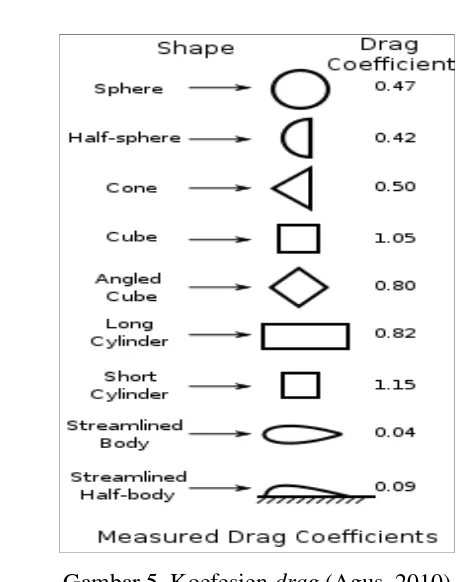
Koefisien drag terdapat pada Gambar 4 dan Gambar 5. Kemudian untuk hambatan yang dihasilkan dari perputaran dari propeller yaitu dengan menggunakan persamaan 2 (Gabriel 2013):
1.225 0.0254 x d4 2( PM prop x 0.0254 x pitch x 60 sec1 min )2 (2)
9
Gambar 5 Koefesien drag (Agus 2010) Proses Konfigurasi
Setelah melakukan penentuan motor dilanjutkan dengan proses konfigurasi. Komponen yang digunakan harus memiliki sinkronasasi satu dengan yang lain agar proses pengendalian bekerja dengan baik. Konfigurasi yang dilakukan diawal yaitu proses konfigurasi antara receiver remote dengan transmiter remote. Langkah pertama yaitu dihubungkannya baterai 2 sell dengan receiver remote dengan kabel jumper. Kemudian konfigurasi dilakukan dengan cara remote dinyalakan dan secara bersamaan tekan dengan jarum pada bagian reset di receiver remote. Jika LED pada receiver berwarna hijau maka proses konfigurasi remote selesai. Setelah itu dilakukan pengaturan pada remote untuk menentukan chanel yang digunakan untuk melakukan pengendalian alat penyemprot padi. Pengaturan remote dilakukan sebagai berikut:
1. Tahap pertama yang dilakukan yaitu menyalakan remote kendali.
2. Pada remote terdapat layar dan disamping layar terdapat tombol untuk mengatur remote, kemudian tombol sebelah kiri layar ditekan ke arah kanan. 3. Kemudian sesuaikan dengan Gambar 6 dengan cara menekan tombol arah
10
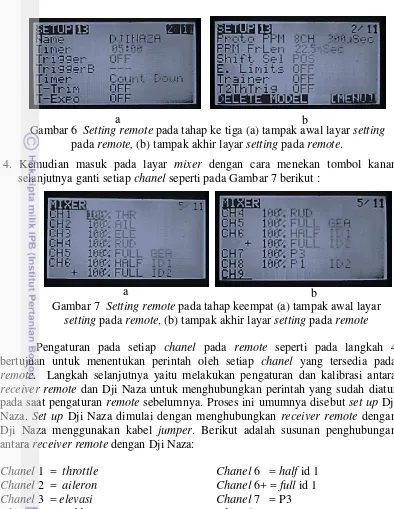
a b
a b
Gambar 6 Setting remote pada tahap ke tiga (a) tampak awal layar setting pada remote, (b) tampak akhir layar setting pada remote.
4. Kemudian masuk pada layar mixer dengan cara menekan tombol kanan selanjutnya ganti setiap chanel seperti pada Gambar 7 berikut :
Gambar 7 Setting remote pada tahap keempat (a) tampak awal layar setting pada remote, (b) tampak akhir layar setting pada remote Pengaturan pada setiap chanel pada remote seperti pada langkah 4 bertujuan untuk menentukan perintah oleh setiap chanel yang tersedia pada remote. Langkah selanjutnya yaitu melakukan pengaturan dan kalibrasi antara receiver remote dan Dji Naza untuk menghubungkan perintah yang sudah diatur pada saat pengaturan remote sebelumnya. Proses ini umumnya disebut set up Dji Naza. Set up Dji Naza dimulai dengan menghubungkan receiver remote dengan Dji Naza menggunakan kabel jumper. Berikut adalah susunan penghubungan antara receiverremote dengan Dji Naza:
Setelah semua terpasang kemudian LED Dji Naza dihubungkan dengan laptop menggunakan kabel data untuk melakukan pengaturan pada software Dji Naza. Kemudian software Dji Naza dibuka dan dipastikan semua terpasang dengan benar hingga lampu biru pada software menyala yang mengindikasikan bahwa Dji Naza sudah terkoneksi dengan software Dji Naza. Proses pengaturan sebagai berikut:
11
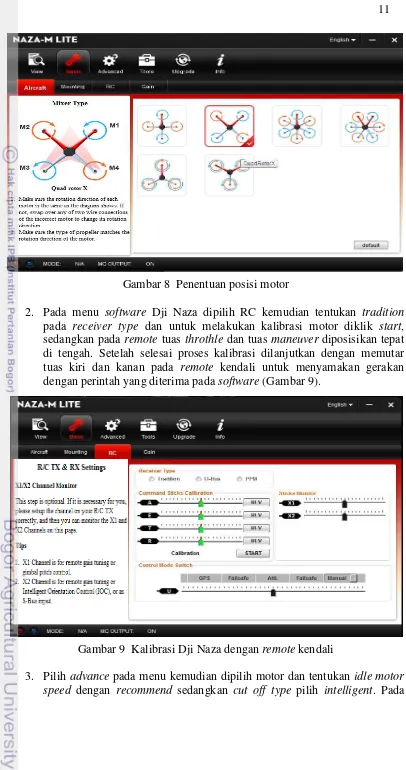
Gambar 8 Penentuan posisi motor
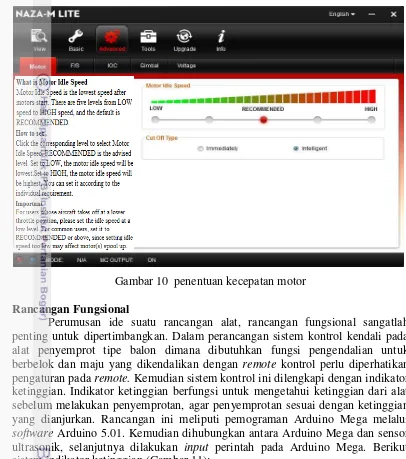
2. Pada menu software Dji Naza dipilih RC kemudian tentukan tradition pada receiver type dan untuk melakukan kalibrasi motor diklik start, sedangkan pada remote tuas throthle dan tuas maneuver diposisikan tepat di tengah. Setelah selesai proses kalibrasi dilanjutkan dengan memutar tuas kiri dan kanan pada remote kendali untuk menyamakan gerakan dengan perintah yang diterima pada software (Gambar 9).
Gambar 9 Kalibrasi Dji Naza dengan remote kendali
12
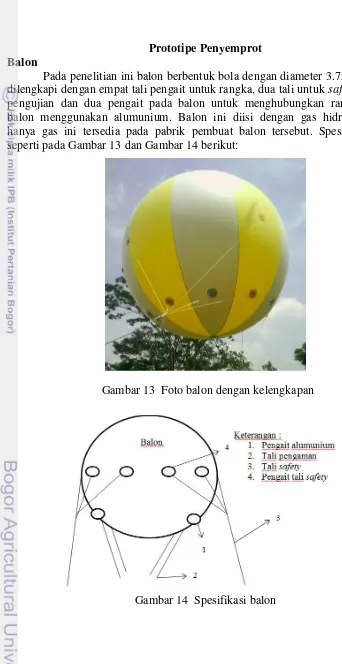
motor speed dipilih recommend karena kecepatan motor saat take of stabil, sedangkan untuk cut off type fungsinya untuk kecepatan dalam menjalankan perintah pengontrolan kecepatan motor (Gambar 10).
Gambar 10 penentuan kecepatan motor Rancangan Fungsional
Perumusan ide suatu rancangan alat, rancangan fungsional sangatlah penting untuk dipertimbangkan. Dalam perancangan sistem kontrol kendali pada alat penyemprot tipe balon dimana dibutuhkan fungsi pengendalian untuk berbelok dan maju yang dikendalikan dengan remote kontrol perlu diperhatikan pengaturan pada remote. Kemudian sistem kontrol ini dilengkapi dengan indikator ketinggian. Indikator ketinggian berfungsi untuk mengetahui ketinggian dari alat sebelum melakukan penyemprotan, agar penyemprotan sesuai dengan ketinggian yang dianjurkan. Rancangan ini meliputi pemograman Arduino Mega melalui software Arduino 5.01. Kemudian dihubungkan antara Arduino Mega dan sensor ultrasonik, selanjutnya dilakukan input perintah pada Arduino Mega. Berikut sistem indikator ketinggian (Gambar 11):
13 Rancangan Struktural
Pada penelitian ini rancangan struktural mengikuti rancangan rangka yang telah dibuat. Pada komponen sistem kontrol seperti flying control, baterai, dan receiver remote berada di atas tangki. Kemudian motor, propeller, dan ESC berada pada lengan yang telah disediakan pada rangka dan ditempel dengan lem perekat jenis 3M yang dikencangkan dengan kabel serut (Gambar 15). Rangka diberi tambahan alumunium untuk menghubungkan rangka dengan balon. Balon yang digunakan untuk pengambilan data berbentuk bola dengan diameter 3.75 m.
Gambar 12 Alur pengendalian
Alur pengendalian pada sistem kontrol ini yaitu perintah pada remote akan diterima oleh receiver remote pada alat penyemprot padi, kemudian perintah tersebut diteruskan ke flying control. Selanjutnya flying control akan menerjemahkan dan memberi perintah pada ESC yang akan menyalakan motor untuk berputar (Gambar 12). GPS pada flying control berfungsi untuk menjaga kestabilan dan mengembalikan alat penyemprot ke posisi ketika hilang frekuensi antara receiver remote dengan pemancar dari remote.
Pada pengujian gerakan maju dilakukan dengan cara menggerakan tuas throttle (tuas bagian kiri) ke depan dan tuas rudder (tuas kanan) diposisikan pada posisi normal. Kemudian untuk pengujian belok kanan dimana tuas throttle di gerakan ke arah kanan atas untuk belok kanan, jika belok kiri gerakan tuas throttle ke arah kiri atas sedangkan untuk tuas rudder tetap pada posisi normal.
Cara Pengukuran Parameter Uji
Pada penelitian ini parameter yang harus diukur yaitu 1. Kecepatan Angin
Kecepatan angin sangat berpengaruh dalam kinerja dari alat penyemprot ini. Pada pengukuran kecepatan angin digunakan anemometer. Cara mengukurnya dengan cara memegang anemomter ke udara kemudian kecepatan angin akan ditunjukan pada monitor anemometer.
2. Rpm Propeller
14
penyemprot ditahan dengan tangan agar tidak bergerak. Kemudian nyalakan tachometer. kalibrasi dilakukan dengan cara menekan tombol data pada tachometer hingga menunjukan angka nol. selanjutnya ujung tachometer diarahkan pada lakban hitam lalu gerakan tuas sebelah kiri kearah depan kanan untuk belok kanan. Kemudian tachometer akan membacanya nilai dari rpm motor. Data yang dicatat adalah angka yang stabil pada tachometer.
3. Kecepatan Maju dan Berbelok
Pengujian ini dilakukan untuk mengetahui kecepatan maju dari alat penyemprot padi. Pengujian maju dilakukan dengan cara mengukur jarak 10 meter kemudian diberi patok. Waktu yang dibutuhkan untuk maju akan di baca oleh stopwatch. Pengujian dilakukan saat alat penyemprot maju melewati patok, pada saat itu stopwatch dihidupkan kemudian stopwatch dimatikan jika alat penyemprot sudah melewati patok yang kedua. Untuk pengujian belok dilakukan hal yang sama namun posisi patok diletakan sejajar ke samping dengan jarak 5 meter. Lakukan perhitungan waktu pada saat alat penyemprot saat berbelok melewati patok pertama hingga berbalik melewati patok kedua yang sejajar dengan menggunakan stopwatch.
Pengolahan Data
Pengolahan data merupakan tahapan penelitian yang sangat penting karena data hasil pengujian tidak dapat menyimpulkan hasil penelitian jika belum dilakukan pengolahan data. Pengolahan data pada penelitian ini yaitu menentukan kecepatan maju dimana kecepatan maju adalah jarak tampuh dibagi dengan waktu tempuh (Persamaan 3). persamaan torsi terdapat pada Persamaan 4. Torsi adalah daya dibagi dengan 2 phi dikalikan dengan kecepatan sudut (Persamaan 5).
15
HASIL DAN PEMBAHASAN
Prototipe Penyemprot Balon
Pada penelitian ini balon berbentuk bola dengan diameter 3.75 meter yang dilengkapi dengan empat tali pengait untuk rangka, dua tali untuk safety pada saat pengujian dan dua pengait pada balon untuk menghubungkan rangka dengan balon menggunakan alumunium. Balon ini diisi dengan gas hidrogen karena hanya gas ini tersedia pada pabrik pembuat balon tersebut. Spesifikasi balon seperti pada Gambar 13 dan Gambar 14 berikut:
Gambar 13 Foto balon dengan kelengkapan tali
16
Pemilihan Komponen Kontrol
Pemilihan bahan dilakukan berdasarkan gaya drag yang ada pada alat penyemprot padi dengan menggunakan coefficient drag (Cd) pada Gambar 4 dan mengacu pada Persamaan 1. Berdasarkan hasil perhitungan daya minimum yang dibutuhkan untuk menggerakan alat penyemprot padi tipe balon yang terdapat pada Lampiran 6, maka motor yang digunkan harus lebih besar dari pada daya yang dibutuhkan. Pada penelitian ini dipilih motor brushless e-max GT-2215/12 dengan spesifikasi sebagai berikut:
Berdasarkan spesifikas pada motor, daya yang terpakai yaitu (Persamaan 6): Pterpakai = Pteoritis (1 + efesiensi) (6) = 200 (1 + 82%) Watt
= 216 Watt
Daya yang terpakai lebih besar dari daya minimum untuk menggerakan rangka, selain itu pemilihan motor juga berdasarkan dilihat dari nilai kv dimana semakin rendah nilai kv maka torsi yang dihasilkan akan semakin besar karena kv adalah rpm/volt. Setelah menentukan motor e-max GT dilanjutkan dengan pemilihan ESC. Pemilihan ESC berdasarkan ampere yang diperlukan motor karena satuan dari ESC adalah ampere, sehingga disarankan oleh produsen motor e-max GT ini adalah 20-30 ampere (Lampiran 1), sehingga penelitian ini menggunakan ESC 30 ampere karena semakin tinggi ampere suhu pada motor itdak cepat panas dibanding dengan menggunakan 20 ampere, akan tetapi penggunaan ESC ini semakin boros baterai.
Berikut merupakan hasil pengujian fungsional dari komponen terbang tanpa balon yang menggunakan rangka multikoper untuk uji fungsional dari setiap komponen kontrol. Hasil dari pengujian waktu persiapan terbang dari dji naza yang melakukan konfigurasi dengan satelit secara otomatis selama satu menit dengan indikator LED berwarna hijau pada Dji naza. Kemudian waktu yang di butuhkan pada saat terbang secara normal hanya mampu bertahan 8 menit. Pengujian kemampuan GPS Dji Naza dilakukan dengan cara menarik quad copter dengan ketinggian 190 cm sejauh 3 m sampai 4 m sesuai literatur dan diambil data jarak maksimal untuk quad copter mampu kembali ke posisi sebelumnya. berikut hasil dari pengujian kemampuan GPS Dji Naza:
Tabel 3 Hasil uji tarik ke belakang
Pengulangan Jarak (m) Waktu (s)
I 3.00 1.80
II 3.40 2.00
III 3.00 1.80
17
Berdasarkan data pada Tabel 4 hingga Tabel 7 kemampuan dari Dji Naza untuk mengontrol kembali ke posisi sebelumnya sejauh 3.4 m. Kemudian rata-rata waktu yang dibutuhkan untuk kembali kepada posisi sebelumnya yaitu dua detik. Menurut spesifikasi pada Dji naza ini radius dan kecepatan kembali ke posisi utama sesuai (Dji Naza 2010), maka Dji naza ini dapat digunakan sebagai flyig control pada penelitian ini. Berikut foto dari penggabungan sistem kontrol dengan rangka:
Gambar 15 Foto penggabungan sistem kontrol dengan rangka Baterai
18
Uji Kinerja Pengujian dilakukan pada pagi dan sore hari. Pengujian pagi hari hari sebsar 1.13 m/s. Kecepatan ini sangat rendah bahkan tidak terasa oleh kulit . Selanjutnya adalah hasil pengujian waktu tempuh gerak maju dengan lima pengulangan yang dilakukan pada pagi hari:
19 Berdasarkan Tabel 10 waktu yang dibutuhkan unutk berbelok sebesar 20 s dengan radius belok sebesar 5 m, hal ini dikarenakan motor sebagai poros berputar setengah dari kecepatan putar motor penggerak saat berbelok (Tabel 17). Perbandingan rpm antara motor penggerak dengan motor yang menjadi poros saat berbelok yaitu dengan perbandingan 4:1. Selanjutnya adalah hasil pengujian tahanan angin dengan yang dilakukan pada pagi hari:
Tabel 10 Hasil uji tahanan angin
Bagian kiri Bagian kanan
Pengulangan Gaya (kg) Pengulangan Gaya (kg)
I 1.800 I 2.2
II 2.000 II 2.0
III 2.400 III 1.8
Rata-rata 2.067 Rata-rata 2.0
Berdasarkan Tabel 11 gaya tahanan angin terhadap balon dapat dikatakan bahwa daya tahanan angin kecil yaitu sebesar 2.067 kg dan 2.0 kg. Hal ini tidak terlalu banyak berpengaruh pada gerak dari alat penyemprot.
Pengujian sore hari
Hasil pengujian pada sore hari didapatkaan kecepatan angin sebesar 3.3 m/s (Tabel 12). Kecepatan ini jauh lebih besar dari hasil pengujian pada pagi hari. Selanjutnya adalah hasil pengujian waktu tempuh gerak maju dengan lima pengulangan yang dilakukan pada sore hari:
Tabel 12 Hasil uji gerak maju
20
Berdasarkan Tabel 13 waktu tempuh sebesar 10.56 detik, maka kecepatan maju yang didapat sebesar 0.497 m/s. Selanjutnya adalah hasil pengujian waktu berbelok dengan lima pengulangan yang dilakukan pada sore hari:
Tabel 13 Hasil uji Belok
Berdasarkan Tabel 14 waktu yang dibutuhkan untuk berbelok sebesar 27.47 detik. Waktu tersebut lebih lama dikarenakan selain dari putaran motor faktor angin yang kencang sangat mempengaruhi waktu berbelok. Selanjutnya adalah hasil pengujian tahanan angin:
Tabel 14 Hasil uji tahanan angin
Bagian kiri Bagian kanan
Pengulangan Gaya (kg) Pengulangan Gaya (kg)
I 3.4 I 2.8
II 3.0 II 3.2
III 3.2 III 3.0
Rata-rata 3.2 Rata-rata 3.0
Tabel 15 Hasil uji tahanan motor
Bagian kiri Bagian kanan
Pengulangan Gaya (kg) Pengulangan Gaya (kg)
I 3.4 I 2.8
II 3.0 II 3.0
III 3.6 III 3.2
Rata-rata 3.33 Rata-rata 3.0
21 dengan kondisi angin memiliki kecepatan angin rendah, pengendalian dapat dengan mudah dilakukan sedangkan pada sore hari sangat sulit dilakukan pada saat gerak maju dan berbelok hal ini dikarenakan angin pada sore hari memiliki tahanan terhadap alat ini sebesar 3 kg sedangkan kemampuan daya tahan motor sebesar 3 kg (Tabel 14 dan Tabel 15) maka motor tidak akan maju disaat kondisi angin 3.28 m/s.
Data pada sore hari diambilan pada saat kecepatan angin yang mulai menurun dan kecepatan angin pada saat dilapangan sangat tidak beraturan arahnya serta kecepatan lajunya. Menurut Nasir (1990), angin memiliki hubungan dengan sinar matahari karena daerah yang memiliki suhu lebih tinggi karena permukaan tanah yang panas membuat suhu udara diatasnya naik akibatnya udara naik dan mengembang menjadi ringan, sehingga balon yang digunkan untuk mengangkat rangka mendapat dorongan lebih dari udara yang ringan akibat naiknya suhu pada permukaan.
Pada mekanisme berbelok berdasarkan data hasil pengujian di lapangan, alat penyemprot ini tidak dapat langsung berbelok tetapi harus memutar dan membentuk pola setengah lingkaran dengan diameter 5 m. Hal ini dikarenakan motor yang sebagai poros berputar setengah dari kecepatan putar motor penggerak saat berbelok (Tabel 17) dan adanya dorongan dari angin yang berhembus. Berikut data rpm saat berbelok:
Tabel 16 Hasil pengujian rpm saat berbelok Pengulangan Hasil dari pengujian indikator ketinggian didapatkan bahwa pembacaan jarak yang dilakukan oleh sensor tidak secepat seharusnya hal ini dikarenakan receiver gelombang pada ultrasonik yang digunakan sudah bengkok. Selain itu hal ini dikarenakan kondisi angin saat pengujian membuat partikel debu naik ke sensor ultrasonik sehingga menghambat sampainya gelombang ke receiver. Akan tetapi untuk pembacaan jarak dapat bekerja sesuai dengan perintah yang dimasukan pada Arduino Mega yaitu dengan menyala LED jika alat penyemprot padi tersebut berada pada ketinggian 1.5 m hingga 2 m.
SIMPULAN DAN SARAN
Simpulan
22
tipe balon dapat beroperasi, namun masih terdapat kendala dalam pengendalian. Sistem kontrol ini dapat beroperasi dengan kecepatan angin dibawah 1.13 m/s. Pada kecepatan angin tersebut didapatkan kecepatan maju sebesar 1.16 m/s dan waktu berbelok 20 s. Kemudian kecepatan putar hasil pengukuran saat berbelok yaitu 8 244 rpm untuk motor bagian kanan dan 10 102 rpm untuk motor bagian kiri. Gaya tahanan motor hasil pengukuran yaitu 3 kg dan daya tahanan angin adalah 2 kg dengan kemampuan daya angkat balon total sebesar 14.2 kg. Sistem kontrol GPS untuk mengembalikan alat penyemprot padi ini secara otomatis belum berfungsi.
Saran
Pada penelitian selanjutnya perlu dilakukan penambahan sistem kontrol servo untuk menjaga ketinggian alat penyemprot sesuai dengan ketinggian berdasarkan jarak optimum pada penymprotan padi dan perlu dilakukan pengaturan pada Dji naza untuk mengatur rpm motor saat berbelok sehingga alat penyemprot padi tipe balon ini dapat berbelok dengan cepat.
DAFTAR PUSTAKA
Adji WS. 2005. Engine Propeller Matching. Surabaya (ID): Institut Teknologi Sepuluh Nopember.
Andi. 2009. Sensor ultrasonik. Prinsip kerja rangkaian ultrasonik [Internet]. [Diunduh 2014 Okt 14]. Tersedia pada: http://atmelmikrokontroler. com. Artanto D. 2012. 60 Aplikasi PLC-mikro. Jakarta (ID): PT. Gramedia.
Antono D. 2012. Motor DC brushless tiga pasa satu kutub. J-Tekno. Politeknik Negeri Semarang. 8(1): 284-290.
[BPS] Badan Pusat Statistik. 2013. Tanaman Pangan. Luas Panen Produktivitas Tnaman Padi Seluruh Indonesia [Internet]. [Diunduh 2014 feb 12]. Tersedia pada: http://www.bps.go.id.
Fuadah, DD dan Mada SWS. 2012. Monitoring dan kontrol level ketinggian air dengan sensor ultrasonik berbasis Arduino. J-Tekno. Universitas Islam Negri Sunan Gunung Djati. 3(1): 105-111.
Kadir A. 2013. Panduan Praktis Mempelajari Mikrokontroler dan pemograman menggunakan Arduino. Jogja (ID): Andi Publisher.
Kardono, Rusdhianto AK, dan Ali F. 2012. Perancangan dan implementasi sistem pengaturan optimal LQR untuk menjaga kestabilan hover pada Quad copter. Jurnal Teknik ITS. Intstitut Teknologi Sepuluh November (ITS). 1(1): 39-55.
Kristanto D. 2012. Rancang bangun pesawat mandiri tanpa awak dengan empat baling-baling penggerak (Automous Quad copter) [skipsi]. Salatiga (ID): Universitas Kristen Satya Wacana (UKSW).
23 Maryono A. 2010. Karakteristik resistensi kelompok pulau di sungai. Jurnal
Teknik Sipil. Universitas Gajah Mada (UGM). 17(3): 197-199.
Nasir AA dan Y Koesmaryono. 1990. Pengantar Ilmu Iklim Untuk Pertanian. Bogor (ID). Pustaka Jaya.
Suyadhi T. (2010). Buku Pintar Robotika. Yogyakarta (ID): Andi Publisher. Staples G. 2013. Significance of blade element theory in performance prediction
of marine propellers. J-Ocean Engineering. University of Padova. 31(6): 957–974.
Wahyudin FPD. 2003. Uji performasi tipe AU pada pesawat terbang zat pemacu keasaman (ZPK) tebu [skripsi]. Bogor (ID): Institut Pertanian Bogor (IPB).
24
LAMPIRAN
Lampiran 1 Contoh perhitungan
Perhitungan pemilihan bahan dimulai dari perhitungan gaya drag. Perhitungan gaya drag sebagai berikut:
Tabel 17 Hasil pengukuran awal kecepatan angin
Pengulangan I II III rataan V2
V angin (m/s) 3.8 3.3 3.4 3.5 12.5
Cd yang digunakan untuk kerangka penyemprot padi yang digunakan dapat dilihat pada lampiran 7 :
Cd angled cube : 0.08 untuk rangka bagian depan Cd bullet : 0.075 untuk permukaan balon
Berdasarkan Persamaan 1 maka dapat diketahui nilai fd Sebagai berikut:
d 0.075 x 1.2
Kemudian propeller yang digunakan pada penelitian ini yaitu nilon 9 x 4.7 artinya propeller ini berdiameter 9 inchi dengan pitch 4.7. pada propeller terdapat gaya thrust yaitu gaya yang mengurai aliran udara yang ditentukan dengan Persamaan 2. Dari spesifikasi propeller yang digunakan memiliki rpm sebesar 4687 Sehingga dari persamaan tersebut gaya thrust yang di dapat yaitu:
1.2253.14 x 0.0254 x4 92(4687x 0.0254 x 4.7 x601)
2
F = 4.370 N
maka gaya total yang dibutuhkan oleh motor yaitu f total = f total drag + f thrust
25 = 11.725 N
Jadi daya total yang dibutuhkan oleh motor adalah P = f x v
• Perhitungan kecepaatan maju v = m/s
Untuk kecepatan maju pagi hari rata-rata dari waktu tempuh adalah 8.6 detik Maka vmaju = 10 m / 8.6 s, vmaju = 1.157 m/s
• Perhitungan torsi
Pada saat berbelok kanan. Gaya torsi motor kanan
P
• Contoh perhitungan torsi
Pada saat berbelok kanan. Gaya torsi motor kiri
26
Lampiran 2 Spesifikasi flying board Dji Naza Main Controller (MC)
The Main Controller (MC) adalah otak dari suatu sistem, sistem ini berkomunikasi dengan semua ESC dan transmitter untuk melaksanakan fungsi autopilot. MC ini memiliki komponen pengukur terdiri dari satu accelerometer 3 sumbu, satu gyroscope 3 sumbu, dan barometer untuk attitude dan altitude
Versatile unite (VU)
Spesial design dari Dji Naza M-lite. Dji naza ini merupakan solusi dari masalah besarnya konsumsi daya pada sistem multi-motor. Fungsinya untuk menyuplai dan memantau daya Dji M-lite serta untuk perangkat elektronik lainnya. LED sebagai indikator perintah Dji M-lite dan USB untuk proses konfigurasi Dji M-lite.
GPS Module
GPS Bracket
Karena GPS dan kompas sangant sensitive terhadap medan magnetseharusnya pengguna menggunakan Bracket GPS unutk modul GPS.
USB Cable
Kabeli ini digunakan untuk konfigurasi MC dengan software Dji Naza. 3-PIN Servo Cable
27 Lampiran 3 Spesifikasi remote control (RC)
The system receives 4 types of inputs: 1. Main Sticks
2. Potentiometers 3. Trims
4. Switches
Input analog untuk proses kalibrasi, kalibrasi ini dilakukan keseluruh bagian pada remote kalibrasi ini langsung memasukan perintah untuk menghasilkan output
pada setiap channel romote ( H1,…, H6). Masukan yang telah dimasukan
kemudian diproses untuk menyesuaikan dengan chanel yang menjadi keluaran.
.
Gambar 16 Foto remote control (R/C) Turnigy 9XR Inputs:
1. RUD – Rudder. 2. ELE – Elevator. 3. THR – Throttle. 4. AIL – Aileron. 5. P1/P2/P3 – Pots. 6. Switches:
i. THR – Throttle cut switch, THR switch adalah lokasi pada back left. ii. RUD – Rudder Dual Rate switch.
iii. ELE – Elevator Dual Rate switch.
7. ID0, ID1, ID2 – 3 posisi switch (mode terbang switch). 3 definisi posisi yaitu ID0-posisi atas, DI1- posisi tengah, ID2-posisi bawah.
8. AIL – Aileron Dual Rate switch. 9. GEA – Gear switch.
28
Lampiran 4 Spesifikasi balon
Balon ini memiliki diameter 3.75 meter dengan bentuk bola, diisi dengan gas hydrogen dengan daya angkat makimal 20 kg
29 Lampiran 5 Foto saat pengujian
Gambar 18 Foto pengambilan data waktu gerak maju
30
31 Lampiran 7 Pemrograman Arduino
Arduino Mega dimasukan perintah menggunakan bahasa C pada software arduino 1.05 seperti pada Gambar 20 berikut:
a b
Gambar 21 Hasil pembacaan sensor ultrasonik pengulangan ketiga
Berikut adalah hasil dari pembacaan sensor ultrasonik dengan tiga pengulangan:
33
RIWAYAT HIDUP
Penulis dilahirkan di Kediri pada tanggal 12 Maret 1992. Anak pertama dari empat bersaudara dari pasangan Bapak Rudy dan Ibu Dini. Penulis menyelesaikan pendidikan di Sekolah Dasar Negeri (SDN) 010 percontohan jakarta pada tahun 2004. Penulis kemudian melanjutkan pendidikan Sekolah Menengah Pertama Negeri (SMPN) 235 lulus pada tahun 2007, kemudian melanjutkan ke Sekolah Menengah Atas Negri (SMAN) 86 lulus pada tahun 2010. Pada tahun 2010 penulis diterima sebagai mahasiswa di Institut Pertanian Bogor (IPB) melalui jalur Seleksi Nasional Masuk Perguruan Tinggi Negri (SNMPTN) di Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian.