PEMODELAN HIDRODINAMIKA PASANG SURUT TELUK MAYALIBIT KABUPATEN RAJA AMPAT PROVINSI PAPUA BARAT
ASEP SANDRA BUDIMAN
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN SUMBER
INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa tesis berjudul Pemodelan Hidrodinamika Pasang Surut Teluk Mayalibit Kabupaten Raja Ampat Provinsi Papua Barat adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, April 2015
Asep Sandra Budiman
RINGKASAN
ASEP SANDRA BUDIMAN. Pemodelan Hidrodinamika Pasang Surut Teluk Mayalibit Kabupaten Raja Ampat Provinsi Papua Barat. Dibimbing oleh ALAN F. KOROPITAN dan I WAYAN NURJAYA.
Teluk Mayalibit merupakan sebuah perairan semi-tertutup dan berada di tengah-tengah pulau Waigeo Raja Ampat. Teluk ini terhubung dengan perairan terbuka melalui suatu jalur atau celah yang panjang, sempit, dan berkelok serta menjadi satu-satunya akses pertukaran massa air. Kondisi ini membuatnya rentan terhadap pencemaran sehingga diperlukan kajian mengenai dinamika massa air terkait kondisi pasang surut dan arus residu pasang surut yang dapat menjelaskan kemungkinan distribusi atau fate materi atau polutan di dalam teluk berdasarkan kondisi fisik perairannya.
Studi dinamika massa air terkait pasang surut dan arus residu pasang surut di Teluk Mayalibit telah dilakukan dengan membangun sebuah model hidrodinamika 2D. Persamaan Hidrodinamika 2D dengan suku non-liniernya diselesaikan secara eksplisit melalui metode beda hingga (finite difference). Perambatan gelombang M2 dan K1 diamati dan dianalisa di 25 titik grid pada domain model. Arus residu M2, K1, dan M4 ditentukan dan digambarkan secara spasial. Validasi model dilakukan terhadap arus pasang surut. Hasil validasi menunjukkan bahwa arus pasang surut antara hasil model dan pengukuran sudah cukup bersesuaian, baik nilai maupun polanya. Secara umum, hasil simulasi menunjukkan bahwa terdapat perbedaan yang signifikan antara pasang surut di dalam dan di luar teluk. Jalur yang panjang dan sempit diduga kuat menjadi penyebabnya. Kesimpulan ini diperkuat dengan hasil simulasi perambatan gelombang pasang surut M2 dan K1. Amplitudo M2 dan K1 di dalam teluk menjadi 10 kali lebih rendah daripada di luarnya dengan keterlambatan fasa sebesar 1800 atau 6 jam (M2) dan 1600 atau 12 jam (K1). Hasil ini menunjukkan bahwa pasang surut di dalam dan di luar teluk berada pada kondisi yang berkebalikan. Kondisi Pasang surut di dalam teluk akan surut ketika di luar pasang dan begitupun sebaliknya. Arus residu M2 bergerak ke dalam teluk dengan pola yang seragam sementara arus residu K1 mengalir ke luar menuju laut terbuka di bagian Utara namun mengalir masuk ke dalam teluk di bagian Selatan. Namun, pada akhirnya keduanya bertemu di bagian tengah teluk. Arus residu M4 mengalir ke luar teluk di bagian Utara sampai ke bagian tengah dan terkumpul di bagian Selatan. Keberadaan arus residu M2, K1, dan M4 yang mengalir masuk ke dalam teluk dan terkumpul di beberapa titik akan menjebak materi atau polutan di dalam teluk dan harus diwaspadai karena dapat membuat Teluk Mayalibit rentan terhadap pencemaran air.
SUMMARY
ASEP SANDRA BUDIMAN. Hydrodinamics Modelling of Tide on Mayalibit Bay, Raja Ampat Province of West Papua. Supervised by ALAN F. KOROPITAN and I WAYAN NURJAYA.
Mayalibit Bay is a semi-enclosed waters that lies on the center of Waigeo Island, Raja Ampat District, West Papua Province. This bay is connected to the open sea through a long and narrow channel which becomes the only way for the water mass exchange. This condition would make The Bay vulnerable to water pollution, thus a study on water mass dynamics concerning to tide and tide-induced residual currents is necessary to describe the possibilities of material distributions inside the bay, according to it physical conditions.
Study on tidal waves and residual current in Mayalibit Bay was conducted by constructing the 2D hydrodynamic models. The 2D hydrodynamic equations with the non-linier terms were solved explicitly by applying finite difference methods. M2 and K1 wave propagations were observed and analyzed at 25 observation points on model domains. M2 and K1 residual currents were obtained and described spatially. Model validation was applied to tidal currents and the result showed that tidal currents generated by the model and field measurements were quite fit, both values and patterns. In general, simulation results showed the significant differences between the tide inside and outside the Bay. The longed and narrowed channel is assumed to cause it. This was strongly explained by the simulation results of M2 and K1 wave propagations. The M2 and K1 amplitudes inside The Bay became 10 times lower than at the outside, with phase lags were about 1800 or 6 hours (M2) and about 1600 or 12 hours (K1). This simulation result indicates that the tide inside and outside the Bay were in the opposite conditions. Ebb tide will occur inside the Bay while flood is occuring outside the Bay, and vice versa. M2 residual currents flowed into the Bay uniformly, while K1 residual currents flowed out to the open sea in the Northern part and it flowed into the Bay in the southern part of the Bay. However, both of them converge in the middle of The Bay eventually. M4 residual current flowed out to the open sea in the Northen parts to the middle of the Bay and it was converged in the Sourthen part. The exixtence of M2, K1, and M4 residual current which flowed into the Bay and converged in many points will trap the materials or pollutans inside the Bay and should be noted since it would make Mayalibit Bay vulnerable to water pollutions.
© Hak Cipta Milik IPB, Tahun 2015
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains
pada
Program Studi Ilmu Kelautan
PEMODELAN HIDRODINAMIKA PASANG SURUT TELUK
MAYALIBIT KABUPATEN RAJA AMPAT PROVINSI PAPUA
BARAT
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
BOGOR
2015
Judul Tesis : Pemodelan Hidrodinamika Pasang Surut Teluk Mayalibit Kabupaten Raja Ampat Provinsi Papua Barat
Nama : Asep Sandra Budiman
NIM : C551120101
Disetujui oleh Komisi Pembimbing
Dr.Alan F. Koropitan, S.Pi, M.Si. Ketua
Dr.Ir. I Wayan Nurjaya, M.Sc. Anggota
Diketahui oleh
Ketua Program Studi Ilmu Kelautan
Dr.Ir.Nevianty P Zamani, M.Sc.
Dekan Sekolah Pascasarjana
Dr.Ir. Dahrul Syah, M.ScAgr.
Tanggal Ujian: 17/04/2015
PRAKATA
Alhamdulillaahi Robbil ‘Aalamiin..Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga tesis berjudul: “Pemodelan Hidrodinamika Pasang Surut Teluk Mayalibit Kabupaten Raja Ampat Provinsi Papua Barat ” ini dapat penulis selesaikan. Tesis ini merupakan salah satu syarat memperoleh gelar Magister Sains pada Program Studi Ilmu Kelautan, Sekolah Pascasarjana Institut Pertanian Bogor (IKL-SPs IPB). Sebagian dari hasil penelitian di dalam tesis telah dipublikasikan di jurnal DEPIK dengan judul Pemodelan Arus Pasang Surut Teluk Mayalibit Kabupaten Raja Ampat Papua.
Terima kasih penulis ucapkan kepada Bapak Dr.Alan F Koropitan, S.Pi, M.Si dan Bapak Dr.Ir. I Wayan Nurjaya, M.Sc selaku pembimbing, serta Bapak Dr.Ir.Agus Atmadipoera, DESS yang telah banyak memberi saran dan masukan selama ujian sidang. Di samping itu, penghargaan penulis sampaikan kepada Bapak M Furqon Aziz I, S.Si, M.Sc dan Bapak Adi Purwandana, S.Si, M.Si dari P2O LIPI, Bapak Dr. Gentio, M.Si dari DISHIDROS TNI AL yang telah membantu selama pengumpulan data. Sahabat seperjuanganku semua Program Magister dan Doktor yang tidak bisa disebut satu persatu di IKL IPB angkatan 2012, Rekan-rekan di Lab. Data Processing Oseanografi FPIK IPB Pak Tri Hartono, Ibu Tyas, Ibu Yuanita, Alin, Ida, Nabil yang telah banyak memberikan dukungan moral. Rekan-rekan administrasi dan TU IKL, khususnya Ani, Maya, Ibu Denti, Pak Danu, Pak Arja yang telah banyak membantu segala urusan administratif. Ungkapan terima kasih juga penulis sampaikan kepada ayah dan ibu, Siti Nurbayasari Istriku tercinta, anak-anakku Halim dan Rayhan serta seluruh keluarga, atas segala doa dan kasih sayangnya.
Semoga penelitian ini bermanfaat dalam perkembangan ilmu pengetahuan khususnya dalam bidang ilmu kelautan. Aamiin.
Bogor, April 2015
DAFTAR ISI
1 PENDAHULUAN 1
Perumusan Masalah 3
Tujuan Penelitian 3
Manfaat Penelitian 4
Ruang Lingkup Penelitian 4
2 TINJAUAN PUSTAKA 4
Kondisi umum Teluk Mayalibit 4
Kondisi Oseanografi Teluk Mayalibit 5
3 METODE PENELITIAN 19
Waktu dan Tempat Penelitian 19
Diskritisasi Persamaan 20
Desain Model 21
Data 22
Alat 22
Prosedur Analisis Data 22
4 HASIL DAN PEMBAHASAN 24
5 SIMPULAN DAN SARAN 36
Simpulan 36
Saran 37
DAFTAR PUSTAKA 37
LAMPIRAN 40
DAFTAR TABEL
1. Konstanta- Konstanta harmonik pasang surut (Bowden, 1983) 7 2. Tipe pasang surut berdasarkan bilangan formzahl (F) 8 3. Karakteristik arus dan transpor massa air di titik tambat 19 4. Parameter yang digunakan dalam Model Hidrodinamika 22 5. Konstanta Harmonik arus pasang surut hasil model dan pengukuran 24 6. Statistika Arus Hasil Model dan Pengukuran 26
DAFTAR GAMBAR
1. Teluk Mayalibit dan posisinya diantara pulau Papua 1 2. Tebing-tebing batu yang mencirikan karakteristik pantai Teluk Mayalibit
(PEMKAB RA 2006) 4
3. Tipe-tipe pasang surut di perairan Indonesia 5
4. Tipe-tipe pasang surut 8
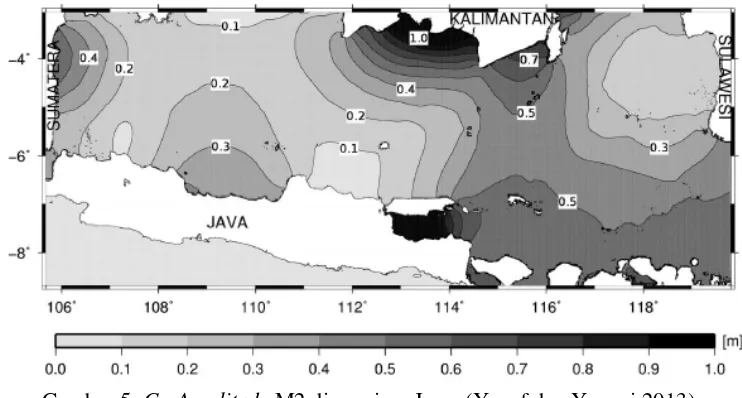
5. Co-Amplitude dan Co-Phase M2 9
6. Co-Amplitude dan Co-Phase M2 10
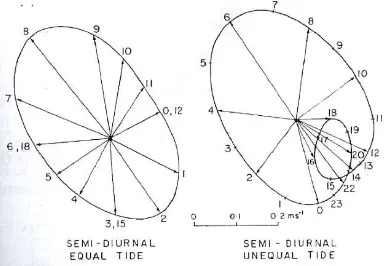
7. Contoh Hodograph arus pasang surut 11
8. Skema Numerik Derivatif bersudut (Angled-derivative) 16 9. Titik tambat pengukuran arus untuk validasi model. 18
10. Karakteristik arus di titik tambat 18
11. Penampang basah di titik tambat. 19
12. Daerah kajian model (kotak merah) serta titik validasi model 19 13. Titik Pengamatan pola perambatan pasang surut di Teluk Mayalibit 23 14. Grafik pencar (scatter plot) arus pasang surut di titik validasi antara
hasil model dan pengukuran 26
15. Hasil simulasi elevasi Teluk Mayalibit saat pasang purnama 27 16. Hasil simulasi pola arus Teluk Mayalibit saat pasang purnama 27 17. Hasil simulasi elevasi Teluk Mayalibit saat pasang perbani 28 18. Hasil simulasi pola arus Teluk Mayalibit saat pasang perbani 28
19. Co-Amplitude M2 30
20. Co-Phase M2 30
21. Co-Amplitudo K1 31
22. Co-Phase K1 31
23. Co-Amplitudo (kiri) dan Co-Phase (kanan) M4, M6, dan M8 32
24. Arus Residu M2 (cm/s) 33
25. Arus Residu K1 (cm/s) 34
26. Arus Residu M4 (cm/s) 34
27. Arus Residu M2 (cm/s) 35
28. Arus Residu K1 (cm/s) 36
DAFTAR LAMPIRAN
1. Diagram Alir Pembangunan Model 41
2. Peta Batimetri DISHIDROS AL 42
3. Pasang Surut Perairan Raja Ampat Nov 2008 43
1
1
PENDAHULUAN
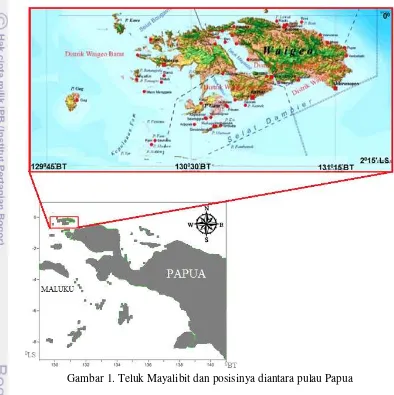
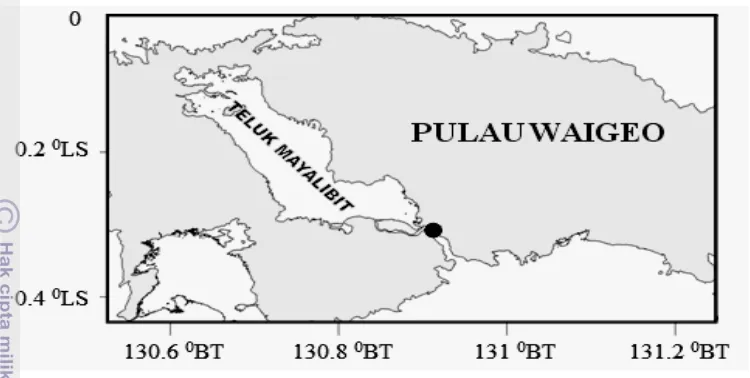
Teluk Mayalibit merupakan sebuah perairan semi tertutup(semi-enclosed) di tengah-tengah Pulau Waigeo Kabupaten Raja Ampat Provinsi Papua Barat yang berada di posisi lintang antara 0.010-0.440LS dan 130.530-131.250BT dengan luas total sekitar 4000 km2 (Gambar 1).
Gambar 1. Teluk Mayalibit dan posisinya diantara pulau Papua
2
penduduk di sekitar Teluk Mayalibit semakin menunjukkan peningkatan dari tahun ke tahun. Angka laju pertumbuhan penduduk Kabupaten Raja Ampat tergolong tinggi dan mencapai 3,09% per-tahun terhitung sejak tahun 2000 sampai 2006. Pada tahun 2004, populasi penduduk yang tercatat adalah 32.055 jiwa dan jumlahnya meningkat menjadi sekitar 33.000 jiwa di tahun 2006 (Larsen et al,
2011). Pertumbuhan penduduk yang semakin pesat ini lambat laun akan memicu pemanfaatan sumberdaya alam yang tidak terkendali di daratan dan dapat berdampak negatif pada keberlanjutan ekosistem laut pada mata pencarian maritim. Pembangunan pesisir seperti reklamasi pantai, pembuatan jalan dan pembukaan lahan untuk pemukiman baru adalah penyebab kerusakan serius dari ekosistem pesisir penting seperti hutan bakau, padang lamun dan terumbu karang akibat penutupan langsung atau lewat aliran sedimen. Teluk Mayalibit mendapat dampak terbesar dengan begitu banyaknya kegiatan pembangunan di pesisir karena sifat teluk yang dangkal dan tertutup (Huffard et al, 2010).
Sirkulasi massa air yang terkait arus dapat dibangkitkan oleh adanya gaya gavitasi melalui fenomena pasang surut, angin, dan gradien tekanan (Pond dan Pickard, 1983). Dinamika massa air Teluk Mayalibit, khususnya arus lebih dipengaruhi oleh adanya fenomena pasang surut. Saat pasang, massa air bergerak ke dalam teluk dan keluar pada saat surut. Hal ini sejalan dengan Triatmodjo (1999) yang mengatakan bahwa pasang surut merupakan gaya penggerak utama sirkulasi massa air di perairan sempit dan semi tertutup seperti teluk. Kajian dinamika massa air dapat dilakukan dengan membangun sebuah model numerik.
Model Hidrodinamika pasang surut 2D dapat diterapkan di Teluk Mayalibit untuk mengkaji dinamika massa air di wilayah tersebut yang terkait pasang surut dan arus residu pasang surut. Pola arus sangat mempengaruhi distribusi materi-materi di dalam kolom air, khususnya arus residu pasang surut. Arus residu pasang surut memiliki peranan yang sangat penting dalam proses dinamika estuari dan pesisir (Van Manh dan Yanagi 2000). Besar dan arah dari aliran arus residu pasang surut akan menentukan pertukaran massa air dan proses penyebaran serta pengendapan dari berbagai materi, komposisi sedimen dan polutan di wilayah pesisir dan teluk dalam jangka panjang (Ramming dan Kowalik 1980; Yanagi 1999; Liang et al. 2003).
3 Penelitian terintegrasi mengenai faktor non-linier, perambatan gelombang pasang surut beserta arus residu pasang surut melalui model hidrodinamika pasang surut sendiri belum pernah dilakukan dan pemilihan daerah kajian yaitu perairan Teluk Mayalibit merupakan sesuatu yang baru dan belum pernah dilakukan.
Kepulauan Raja Ampat menjadi sebuah kabupaten maritim otonom (kabupaten bahari) sejak tahun 2003. Kondisi ini membuka peluang untuk pengelolaan lokal yang lebih besar terhadap sumberdaya laut yang kaya. Di sisi lain, pemanfaatan sumberdaya alam yang tidak terkendali di daratan dapat berdampak negatif pada keberlanjutan ekosistem laut pada mata pencarian maritim. Teluk Mayalibit mendapat dampak terbesar dari banyaknya kegiatan pembangunan di pesisir dan sifat teluk yang dangkal dan tertutup (Huffard et al.
2010). Kajian mengenai dinamika massa air dalam kaitannya dengan pasang surut dan gelombang pasang surut di Teluk Mayalibit diperlukan untuk memberikan gambaran kemungkinan pola sebaran atau fate dari materi, polutan, atau zat-zat buangan bilamana terjadi pencemaran dimana informasinya sangat bermanfaat untuk pemerintah daerah setempat agar dapat mengelola wilayah perairan ini dengan baik. Salah satu metode yang dapat digunakan untuk mengkaji dinamika massa air suatu perairan khususnya arus residunya adalah melalui aplikasi model numerik dengan membangun sebuah model hidrodinamika pasang surut.
Perumusan Masalah
Teluk Mayalibit merupakan wilayah perairan yang rentan pencemaran karena sifatnya yang tertutup. Buangan dari daratan atau polutan diduga kuat akan terperangkap dan terakumulasi dalam waktu yang lama. Kajian dinamika massa air khususnya arus residu pasang surut diperlukan terutama untuk menjelaskan hal ini karena dapat memberikan gambaran mengenai kemungkinan pola sebaran atau
fate materi-materi yang ada di dalam teluk. Salah satu cara yang dapat dilakukan adalah dengan membangun sebuah model numerik Hidrodinamika pasang surut 2D dimana model ini cocok diterapkan di Teluk Mayalibit mengingat pasang surut merupakan gaya penggerak utama dinamika massa air di wilayah ini. Topografi dan bentuk geometri pantai yang cukup rumit membuat gerak-gerak non-linier massa air sehingga suku non-linier ditambahkan dan diperhitungkan di dalam persamaan hidrodinamikanya. Persamaan Hidrodinamika diselesaikan secara numerik dengan metode beda hingga (finite difference) untuk dapat diterjemahkan ke dalam bahasa pemrograman di PC (Personal Computer). Luaran model adalah penggambaran pola arus, elevasi, perambatan gelombang pasang surut dan arus residu pasang surut secara spasial yang lebih jauh akan memberikan gambaran mengenai dinamika massa air serta kemungkinan pola sebaran materi bilamana terjadi pencemaran di Teluk Mayalibit.
Tujuan Penelitian
4
Manfaat Penelitian
Hasil penelitian dapat menjadi basis data oseanografi, dasar bagi penelitian lebih lanjut terkait kajian dinamika massa air serta bahan masukan, informasi tambahan dan rekomendasi bagi pengelola Teluk Mayalibit.
Ruang Lingkup Penelitian
Wilayah kajian dan daerah model adalah Teluk Mayalibit yang terletak di tengah Pulau Waigeo Kabupaten Raja Ampat Provinsi Papua Barat. Penelitian yang dilakukan mencakup pembangunan Model Hidrodinamika pasang surut 2D, pengolahan data dan analisis. Tahap pembangunan model meliputi proses validasi dan simulasi. Validasi model dilakukan dengan membandingkan hasil model dengan hasil pengukuran di lapangan untuk melihat kinerja dan relevansi dari model yang telah dibuat. Pengolahan data dan analisis dilakukan terhadap hasil keluaran (output) model yang meliputi arus, elevasi, perambatan gelombang pasang surut, dan arus residu pasang surut secara spasial sehingga dapat diperoleh gambaran mengenai dinamika massa air Teluk Mayalibit oleh fenomena pasang surut. Hal ini akan dapat memberikan gambaran mengenai kemungkinan pola sebaran atau distribusi materi atau polutan di wilayah perairan ini dan besaran potensi pencemaran yang akan terjadi.
2
TINJAUAN PUSTAKA
2.1. Kondisi umum Teluk Mayalibit
Teluk Mayalibit dikelilingi oleh pantai-pantai bertebing yang dicirikan dengan relief sedang-tinggi, batu gamping putih, batuan beku, basal, masif, dan keras dengan tinggi tebing 2-100 m serta kemiringan 20% sampai terjal (PEMKAB RA 2006) (Gambar 2) dan terhubung langsung dengan perairan lepas melalui suatu jalur akses keluar masuk yang panjang (38 km) dan sempit (McKenna et al. 2012) serta termasuk perairan dangkal dengan kedalaman maksimum kurang dari 30 m (Lampiran 2) (DISHIDROS 2006).
5 Kondisi perairan Teluk Mayalibit yang hampir tertutup ini membuat dinamika massa air khususnya arus lebih dipengaruhi oleh adanya fenomena pasang surut. Saat pasang, massa air bergerak ke dalam teluk dan keluar pada saat surut. Hal ini sejalan dengan Triatmodjo (1999) yang mengatakan bahwa pasang surut merupakan gaya penggerak utama sirkulasi massa air di perairan sempit dan semi tertutup seperti teluk. Hasil penelitian DKP PEMKAB RA (2006) menunjukkan bahwa arus di perairan Raja Ampat didominasi oleh pengaruh angin, namun untuk wilayah teluk dan pulau-pulau kecil yang berdekatan pola arusnya, lebih dipengaruhi oleh pasang surut.
2.2. Kondisi Oseanografi Teluk Mayalibit
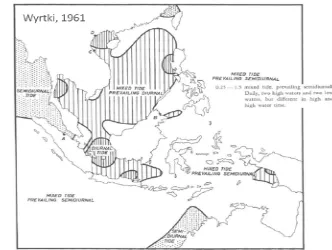
Tipe pasang surut wilayah perairan timur Indonesia termasuk Raja Ampat dimana Teluk Mayalibit berada adalah campuran condong ke harian ganda (Gambar 3) dimana dalam sehari terjadi dua kali pasang dan dua kali surut dengan tinggi berbeda (Wyrtki 1961; Pariwono 1989).
6
adanya pertemuan penjalaran gelombang dari Samudera Pasifik dan Samudera Hindia, sedangkan komponen pasang surut diurnal lebih mendominasi di Perairan Indonesia bagian Barat seperti di Laut Jawa dan Laut Cina Selatan. Data pengamatan yang dilakukan di pantai APSOR (Suprau - Sorong) menunjukkan bahwa kisaran tinggi pasang surut berkisar antara 1.15 – 1.80 m (DISHIDROS 2005).
Pola arus di perairan Raja Ampat lebih banyak dipengaruhi oleh sirkulasi massa air Samudera Pasifik Barat (Western Pacific Ocean) yang bergerak dari arah timur menuju barat laut (North West) dan sejajar dengan daratan Papua bagian utara. Ketika arus ini tiba di Laut Halmahera atau bagian utara Kepulauan Raja Ampat, arus tersebut sebagian bergerak ke selatan dan sebagian berbalik menuju Samudera Pasifik. Arus ini dikenal sebagai Halmahera Eddie dan diduga sebagian arus ini memasuki perairan Raja Ampat. Hasil penelitian DKP Raja Ampat pada bulan Maret 2006, didapatkan bahwa arus di Perairan Raja Ampat didominasi oleh pengaruh angin, namun untuk wilayah teluk dan pulau-pulau kecil yang berdekatan pola arusnya, lebih dipengaruhi oleh pasang surut (PEMKAB RA 2006). Hasil pemantauan P2O LIPI pada tahun 2008 terhadap parameter fisis massa air di mulut Teluk Mayalibit menunjukkan adanya keterkaitan yang erat antara dinamika massa air dengan pasang surut di wilayah perairan ini. Dengan kata lain, pemicu utama dinamika massa air atau arus di perairan Teluk Mayalibit adalah pasang surut. Hasil pantauan arus oleh tim peneliti LIPI selama 20 jam di titik tambat yang berada di jalur teluk menunjukkan kecepatan arus maksimum sebesar 150 cm/det pada saat pasang dan 100 cm/s pada saat surut.
Perairan Raja Ampat berbatasan dengan Samudera Hindia dan Pasifik, sehingga sifat dan kondisi fisik-kimia massa air, arus dan pasang surut dipengaruhi oleh kedua samudera tersebut. Penyebaran suhu permukaan perairan dipengaruhi oleh Samudera Pasifik di bagian utara dan Laut Banda di bagian selatan. Raja Ampat yang terletak di wilayah tropis memiliki suhu permukaan yang relatif hangat dengan variasi tahunan yang kecil. Berdasarkan pengamatan Conservation International Indonesia (CII), The Nature Conservancy (TNC) dan World Wild Fund (WWF) pada bulan November 2005 sampai dengan Juli 2006, diperoleh suhu permukaan di perairan Raja Ampat berkisar antara 27.01 – 34.97 0
C dengan suhu rata-rata 29.16 0C (PEMKAB RA 2006). Hasil pengukuran suhu oleh P2O LIPI pada tahun 2008 di Teluk Mayalibit menunjukkan bahwa nilai suhu berkisar antara 30.08 oC – 33.73 oC dengan rata-rata sebesar 31.18 ± 0.9 oC. Suhu di lapisan dekat permukaan (1 m – 5 m) memiliki nilai yang cenderung lebih tinggi.
Salinitas di lapisan permukaan perairan Raja Ampat berkisar antara 30 – 35 Psu, pada kedalaman 10 meter berkisar antara 32 – 35 Psu dan di Teluk Mayalibit berkisar antara 27,5 - 33,8 Psu (DKP KRA 2006 dalam PEMKAB RA 2006). Nilainya tidak berbeda jauh dengan hasil pengukuran P2O LIPI pada bulan Nopember 2008 yang menunjukkan kisaran salinitas antara 27.05 - 32.4 Psu di teluk ini.
7 tersuspensi, sedangkan kecerahan maksimum berada di perairan daerah Kofiau yang mencapai 23 m. Hal ini diperkirakan karena lokasi ini berada pada kawasan perairan bebas (cukup jauh dari daratan) sehingga pengaruh bahan-bahan tersuspensi yang berasal dari aktifitas daratan sangat kecil.
2.3. Pasang Surut
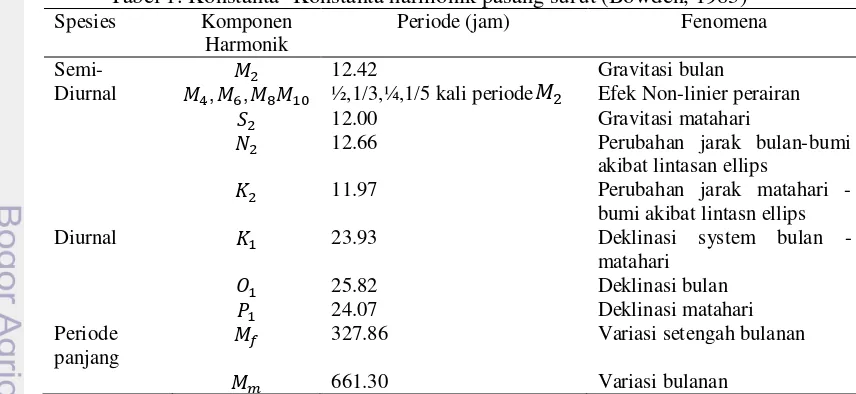
Pasang surut air laut merupakan superposisi atau interaksi dari fenomena-fenomena yang dihasilkan oleh sistem bumi dan benda angkasa terutama bulan, dan matahari beserta kedudukan relatifnya terhadap bumi. Posisi bulan dan matahari relatif terhadap bumi berubah dengan orbit bulan mengelilingi bumi dan orbit bumi mengelilingi matahari. Gerakan vertikal muka air laut yang periodik dan dikenal sebagai pasang surut tersebut merupakan resultan atraksi gravitasi bulan dan matahari pada waktu dan kedudukan tertentu. Gelombang pasang surut yang diamati di suatu lokasi merupakan superposisi dari beberapa gelombang yang masing-masing dibangkitkan oleh kedudukan benda langit tertentu dan dinyatakan dalam suatu bilangan atau konstanta harmonik (Bowden 1983). Konstanta harmonik pasang surut terbagi atas 3 kelas atau spesies utama berdasarkan siklus atau periodenya, yaitu komponen pasang surut semi-diurnal
dengan periode setengah harian, diurnal dengan periode harian, dan periode panjang (Pond dan Pickard 1983; Bowden 1983). Tabel 1 memperlihatkan komponen-komponen harmonik utama berikut perioda dan fenomena alam yang mengakibatkannya. M2 merupakan komponen pasang surut yang paling dominan (principal lunar) karena gravitasi bulan terhadap titik-titik di bumi relatif lebih besar dibandingkan dengan gaya pembangkit pasang surut yang lainnya. Hal ini dikarenakan jarak bulan dengan bumi yang lebih dekat daripada dengan benda-benda angkasa lainnya.
Tabel 1. Konstanta- Konstanta harmonik pasang surut (Bowden, 1983)
Spesies Komponen
Harmonik
Periode (jam) Fenomena
Semi-Diurnal , ,
12.42
½,1/3,¼,1/5 kali periode
Gravitasi bulan
Efek Non-linier perairan
12.00 Gravitasi matahari
12.66 Perubahan jarak bulan-bumi
akibat lintasan ellips
11.97 Perubahan jarak matahari
-bumi akibat lintasn ellips
Diurnal 23.93 Deklinasi system bulan
-matahari
25.82 Deklinasi bulan
24.07 Deklinasi matahari
Periode panjang
327.86 Variasi setengah bulanan
661.30 Variasi bulanan
Subscript pada spesies diurnal dan semidiurnal menunjukkan jumlah siklus dalam satu hari. Pasang surut dinyatakan dalam suatu persamaan matematika sebagai berikut:
8
dengan y = tinggi muka air saat t, A = amplitudo pasang surut, ω= kecepatan sudut = 2πf, t =waktu dan φ = keterlambatan fase. Pasang surut yang terjadi di suatu titik di permukaan bumi merupakan resultan dari jarak dan kedudukan bulan dan matahari terhadap bumi yang selalu berubah secara periodik. Fenomena ini dinyatakan dengan superposisi dari persamaan-persamaan gelombang pasang surut karena bulan, matahari dan kedudukan relatifnya.
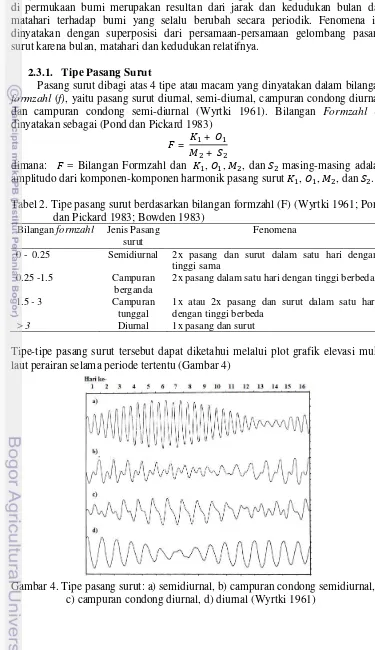
2.3.1. Tipe Pasang Surut
Pasang surut dibagi atas 4 tipe atau macam yang dinyatakan dalam bilangan
formzahl (f), yaitu pasang surut diurnal, semi-diurnal, campuran condong diurnal, dan campuran condong semi-diurnal (Wyrtki 1961). Bilangan Formzahl (f)
dinyatakan sebagai (Pond dan Pickard 1983)
= +
+
dimana: = Bilangan Formzahl dan , , , dan masing-masing adalah amplitudo dari komponen-komponen harmonik pasang surut , , , dan . Tabel 2. Tipe pasang surut berdasarkan bilangan formzahl (F) (Wyrtki 1961; Pond
dan Pickard 1983; Bowden 1983) Bilangan formzahl Jenis Pasang
surut
Fenomena
0 - 0.25 Semidiurnal 2x pasang dan surut dalam satu hari dengan tinggi sama
0.25 -1.5 Campuran
berganda
2x pasang dalam satu hari dengan tinggi berbeda
1.5 - 3 Campuran
tunggal
1x atau 2x pasang dan surut dalam satu hari dengan tinggi berbeda
> 3 Diurnal 1x pasang dan surut
Tipe-tipe pasang surut tersebut dapat diketahui melalui plot grafik elevasi muka laut perairan selama periode tertentu (Gambar 4)
9 2.3.2. Konstanta Harmonik Perairan Dangkal
Gelombang pasang surut yang merambat ke perairan dangkal atau pantai akan mengalami berbagai perubahan. Gerak non-linier yang dapat diakibatkan oleh gaya gesekan dasar akan mengakibatkan kehadiran frekuensi-frekuensi yang tinggi dari konstanta harmonik pasang surut yang dikenal dengan konstanta harmonik perairan dangkal. , , , … akan muncul sebagai gelombang dengan frekuensi yang lebih tinggi dari sebagai gelombang dasarnya dan
, , … akan muncul sebagai gelombang berfrekuensi lebih tinggi dari sebagai gelombang dasarnya. Gelombang-gelombang frekuensi tinggi yang muncul dari gelombang dasarnya ini dikenal dengan istilah overtide. Efek non-linier di perairan dangkal juga dapat memunculkan gelombang dengan frekuensi yang merupakan interaksi dari 2 komponen harmonik dasar dan dikenal dengan istilah
compound tide seperti yang merupakan gelombang yang dihasilkan dari interaksi dan serta memiliki frekuensi sebesar ditambah (Bowden 1983).
2.3.3. Perambatan Gelombang Pasang Surut
Gelombang pasang surut menjalar pada samudera di bumi sebagai gelombang panjang yang bersifat progresif, yang dapat termodifikasi oleh refleksi (pantulan) balik, gaya Coriolis dan gesekan (friksi). Gaya-gaya dan gelombang ini memberikan pengaruh yang lebih besar terhadap kehidupan di daerah pesisir dibandingkan dengan gelombang lainnya di samudera. Pariwono (1989) menyebutkan bahwa tipe pasang surut yang terbentuk di perairan Timur Indonesia adalah campuran dominan ganda. Hal ini disebabkan oleh dominasi penjalaran gelombang pasang surut dari Samudera Pasifik yang masuk ke perairan Indonesia dari bagian Timur di sebelah Utara yakni melalui perairan Selat Makasar, Laut Sulawesi, dan Laut Arafura.
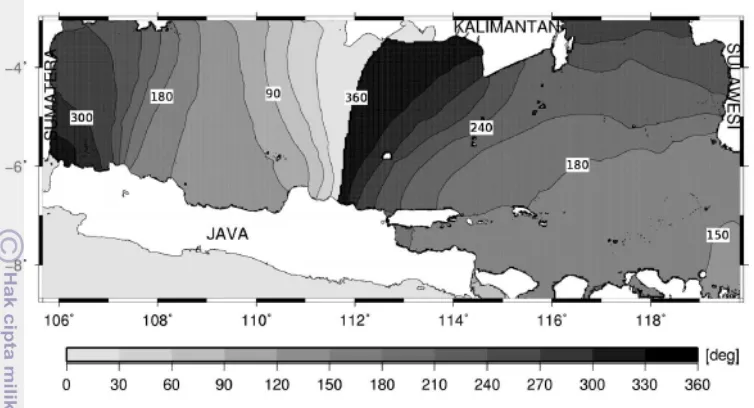
Perambatan gelombang pasang surut di suatu wilayah perairan seringkali digambarkan dengan pola perambatan amplitudo dan fasa dari komponen semidiurnal utama M2 dan komponen diurnal utama K1 (Gambar 5 dan 6).
10
Gambar 6. Co-Phase M2 di perairan Jawa (Yusuf dan Yanagi 2013)
2.4.Gaya Coriolis
Gaya Coriolis merupakan gaya yang bekerja pada gerak massa air dalam skala luas yang diakibatkan oleh rotasi bumi. Gaya ini penting diperhitungkan terutama dalam kajian arus geostropis. Gaya ini memberikan efek aliran rotasi searah jarum jam pada sirkulasi massa air skala luas di belahan bumi utara. Komponen-komponen Gaya Coriolis dalam sumbu-x dan sumbu-y adalah
= dan = − .
dimana f 2 sin = parameter Coriolis
= Kecepatan sudut rotasi bumi (7.29x10-5 rad/det) = sudut lintang geografis
Aliran geostropis dalam kajian sirkulasi massa air dipertimbangkan dengan memperhatikan suatu parameter yang dikenal dengan Radius Deformasi Rossby
(Rb) untuk daerah model yang diteliti, yaitu (Pond dan Pickard, 1983):
f gH
Rb maks
2 / 1
dimana :
Rb : radius deformasi Rossby
g : percepatan gravitasi = 9.8 m/s
maks
H : kedalaman maksimum (m)
f : parameter coriolis
Untuk kajian wilayah perairan skala kecil atau lokal seperti perairan pantai, teluk, dan estuari dimana skala lateralnya lebih kecil dari nilai radius deformasi
11 2.5.Arus Pasang Surut
Pasang surut dapat membangkitkan aliran massa air atau arus dan dikenal sebagai arus pasang surut. Arah aliran arus pasang surut di daerah pantai atau estuari selalu berlawanan atau bolak-balik saat pasang dan surut. Arah aliran arus pasang surut di daerah tersebut akan membentuk pola ellips selama periode pasang surut terjadi sedangkan di laut lepas yang jauh dari halangan berupa daratan atau pulau-pulau, memungkinkan arah arus ini berubah secara teratur membentuk pola yang berputar. Berdasarkan fenomena ini, kecepatan dan arah arus pasang surut dapat direpresentasikan dengan sebuah vektor arus atau
hodograph (Gambar 7) dimana ujung-ujung vektor merupakan besar kecepatannya dan satu periode pasang surut adalah satu putaran ellips. Kecepatan arus pasang surut di daerah pantai lebih besar daripada di daerah laut lepas karena mengalami percepatan aliran akibat adanya penyempitan secara horisontal dan vertikal oleh dasar laut yang dangkal dan topografi pantai. Kecepatan arus ini di laut lepas pada umumnya kurang dari 0.1 m/detik, sedangkan di daerah pantai dimana arus ini dapat melewati selat sempit antara dua pulau, kecepatannya dapat mencapai nilai yang lebih besar (Pond dan Pickard 1983).
.
Gambar 7. Contoh Hodograph arus pasang surut (Pond dan Pickard 1983)
2.6.Arus Residu
Pola arus sangat mempengaruhi distribusi materi-materi di dalam kolom air, khususnya arus residu pasang-surut. Ramming and Kowalik (1980) mengatakan bahwa arus residu merupakan arus non-pasang surut, dimana sirkulasinya terbentuk ketika suku non-linier yang berhubungan dengan gesekan dasar dan komponen adveksi digunakan dalam persamaan (seperti kenyataan di alam). Arus residu pasang surut memiliki peranan yang sangat penting dalam proses dinamika estuari dan pesisir (Van Manh dan Yanagi 2000 dalam Arifin et al. 2012). Besar dan arah dari aliran arus residu pasang surut akan menentukan pertukaran massa air dan proses penyebaran serta pengendapan dari berbagai materi, komposisi sedimen dan polutan di wilayah pesisir dan teluk dalam jangka panjang (Ramming dan Kowalik 1980; Yanagi 1999; Liang et al. 2003).
Arus residu dari komponen utama pasang surut ditentukan melalui persamaan (Ramming dan Kowalik 1980):
=
∫ ( )12 ………...(1) ………...(2) ………...(6) ………...(4) ………...(5) ………...(3) dimana adalah adalah komponen kecepatan arah-x atau y (m/s), T adalah periode suatu komponen pasang surut (detik), H adalah kedalaman perairan (m), adalah elevasi (m), dan t adalah waktu (detik).
2.7. Persamaan Hidrodinamika 2D
Terdapat 4 Jenis gaya yang bekerja pada massa air laut, yaitu gaya gradien tekanan, gaya coriolis, gaya gravitasi, dan gaya friksi per unit massa (Ramming dan Kowalik 1980; Pond dan Pickard 1983; Stewart 2002). Persamaan hidrodinamika diturunkan dari Hukum II Newton yang disebut hukum kekekalan momentum yang menyatakan bahwa perubahan momentum terhadap waktu sama dengan total gaya yang bekerja. Hukum ini dijabarkan dalam bentuk persamaan Hidrodinamika 2D sebagai berikut (Ramming dan Kowalik, 1980):
Komponen-x: u A fv x p y u v x u u t
u
1 Komponen-y: v A fu y p y v v x v u t
v
1
Dengan mengasumsikan bahwa air laut merupakan fluida incompressible,
maka akan ditambahkan persamaan kontinuitas ke dalam sistem persamaan di atas dalam bentuk (Ramming dan Kowalik, 1980):
0 y v x u
Persamaan kontinuitas merupakan persamaan untuk menggambarkan perubahan massa dari fluida yang melewati suatu ruang yang tetap haruslah sama antara debit masukkan dan keluarannya (Pond dan Pickard, 1983). Persamaan Hidrodinamika perataan terhadap kedalaman diperoleh dengan mengintegrasikan persamaan tersebut dari dasar (z) sampai permukaan ( ) dengan mengasumsikan bahwa tekanan permukaan bebas (free surface) dan tekanan atmosfer pa (x, y, t) adalah sama, maka diperoleh (Ramming dan Kowalik, 1980):
)
(
p g H
p a
Persamaan (4) ini disubstitusikan ke dalam persamaan (1) dan (2) sehingga diperoleh persamaan dari komponen arus horizontal 2 dimensi yang tidak terstratifikasi (Ramming dan Kowalik, 1980):
- komponen x
u A x p x g fv y u v x u u t
u a
1 - komponen y
A v y p y g fu y v v x v u t v a 1 I II III IV V
dimana:
= Laplace operator 2 dimensi 2 2 2 2 y j x
13 = = Kecepatan arah-x dan –y (m/det)
f = Parameter Coriolis ( f 2 sin )
g = Percepatan Gravitasi Bumi (m/det2) = Elevasi Permukaan (m)
= densitas air laut (kg/m3 ) ap = Tekanan Permukaan Air Laut (kg/m.det2)
= Koefisien Viskositas Eddy Lateral atau koefisien pertukaran momentum pada arah horizontal
Ruas kiri dari persamaan (5) dan (6) merupakan total derivatif dari kecepatan yang berubah terhadap waktu (percepatan) dan terdiri dari percepatan lokal dan suku advektif. Ruas kanan dari persamaan (5) dan (6) merupakan gaya-gaya yang bekerja pada massa air seperti komponen tekanan, gaya-gaya coriolis, percepatan gravitasi bumi, gaya lain yang bekerja terhadap massa air seperti gaya gesekan angin, gaya gesekan dasar dan gaya gesekan akibat pergerakan partikel fluida itu sendiri yang menghasilkan gerakan turbulen. Arti fisis dari masing-masing suku dalam persamaan (5) dan (6) adalah:
Suku I menyatakan perubahan momentum lokal atau disebut percepatan lokal terhadap bidang horizontal (arah sumbu x dan y).
Suku II merupakan suku adveksi (non-linier)
Suku III adalah perubahan momentum akibat gaya Coriolis ditulis (Bishop 1984) :
sin
2
f
dimana: f = parameter Coriolis
= Kecepatan sudut rotasi bumi (7.29x10-5 rad/det) = sudut lintang geografis
Suku IV menyatakan gaya tekanan horizontal yang terdiri dari dua suku yaitu kontribusi tekanan atmosfir permukaan ( pa) dan tekanan hidrostatik (ph) akibat adanya perbedaan ketinggian muka air, hal ini menyebabkan, massa air bergerak ke daerah tekanan yang lebih rendah. menyatakan elevasi terhadap rerata muka air (MSL) dan pa merupakan tekanan atmosfir di permukaan laut.
Suku V menyatakan gaya gesekan turbulen arah vertikal yang terdiri dari gaya gesekan angin di permukaan dan gaya gesekan dasar. Pengaruh dari gesekan angin terjadi sampai pada kedalaman Ekmann dimana pada kedalaman ini massa air teraduk sempurna. Besarnya gaya gesekan angin
w tergantung pada kecepatan angin dan koefisen geseknya yang dalam bentuk matematis dapat dijabarkan sebagai berikut (Bishop 1984):komponen-x : w=
2 / 1 2 2
w w
w u v
u
; komponen-y : w=
2 / 1 2 2
w w
w u v
v
dimana λ : koefisien gesekan angin uw : kecepatan angin arah sumbu x vw : kecepatan angin arah sumbu y
14
……...(7)
……...(8)
...(9) Komponen- x :
2 / 1 2 2 2 H v u
ru ; komponen-y :
2 / 1 2 2 2 H v u rv
dimana r : koefisien gesekan dasar H : kedalaman total perairan
Suku VI adalah gaya gesekan turbulen horizontal yang besarnya bergantung pada turbulensi dari aliran (Bishop 1984):
komponen x :
2 2 2 2 y u x u
Ah ; komponen y :
2 2 2 2 y v x v Ah
dimana Ahmerupakan koefisien viskositas eddy lateral
2.7.1. Persamaan Hidrodinamika dan Asumsi yang Diterapkan
Asumsi-asumsi yang diterapkan dalam persamaan model hidrodinamika yang digunakan yaitu (Pond dan Pickard, 1983):
Tekanan atmosfer permukaan (Pa) adalah konstan, sehingga turunan parsialnya terhadap x dan y sama dengan nol
0 y P x
Pa a
.Pengaruh gaya coriolis terhadap gerak massa air diabaikan mengingat daerah model yang relatif kecil dan berada dekat dengan khatulistiwa.
Diasumsikan tidak ada stratifikasi densitas air laut (ρ konstan).
Tidak ada sumber (source) dan kebocoran (sink) air laut yang terjadi di dalam daerah model, artinya evaporasi dan presipitasi diabaikan serta dasar laut bersifat impermeable.
Tidak ada sumber momentum (gaya-gaya luar) yang terjadi pada area, seperti gerakan kapal, tsunami dan gempa.
Batas tertutup tidak bergeser dengan naik-turunnya permukaan air laut.
Persamaan hidrodinamika laut yang digunakan berdasarkan asumsi-asumsi di atas adalah sebagai berikut (Ramming dan Kowalik, 1980)
Persamaan Momentum: - komponen x
H H x g fv y u v x u u t
u bx
x s ) ( ) (
- komponen y
H H y g fu y v v x v u t
v s(y) b(y)
- Persamaan Kontinuitas :
0 t y v x u
15 ...(10) ...(11) ………...(12) …...(13) …..(14) …..(15) 2 2 / 1 2 2 2
2 ( )
H V U rU W W W dx gH fV y U V x U U t U y x x - komponen-y: 2 2 / 1 2 2 2
2 ( )
H V U rV W W W dy gH y V V x V U t V y x y
Persamaan Kontinuitas memiliki bentuk:
0 t y V x U
Suku gaya tekanan angin dalam kajian mengenai pasang surut dapat diabaikan (Bowden 1983) sehingga persamaan Hidrodinamika 2D pasang surut pada akhirnya memiliki bentuk:
- komponen x
2 2 / 1 2 2 ) ( H V U rU dx gH y U V x U U t U
- komponen y
2 2 / 1 2 2 ) ( H V U rV dy gH y V V x V U t
V
- Persamaan Kontinuitas:
0 t y V x U
dimana:
0 H z u
U ;
0
H z v
V = Kecepatan tranpor arah sumbu-x dan y = elevasi muka air laut dari muka air laut rata-rata (MSL)
H = kedalaman total perairan (Ho + )
r = Koefisien gesekan dasar
2.7.2. Perlakuan (treatment) Pada Suku Non-Linier
16
digunakan untuk mencari solusi persamaannya. Salah satu metode yang paling mendekati adalah melalui linierisasi (Ramming dan Kowalik). Flather dan Heaps (1975) mengembangkan sebuah model untuk Teluk Morecambe yang menerapkan pendekatan ini untuk suku-suku non-liniernya. Model yang dibuatnya bertujuan untuk menggambarkan perambatan gelombang pasang surut di wilayah kajian dimana tekanan atmosfer dan angin serta suku gesekan horizontal diabaikan (Kowalik dan Murty 1993). Model Hidrodinamika Pasang Surut Teluk Mayalibit memiliki kesamaan dengan model yang dibuat oleh Flather dan Heaps, baik dari persamaan pembangun yang digunakan maupun dari penerapan kasusnya (kajian pasang surut) sehingga perlakuan terhadap suku-suku non-linier dalam tesis ini menerapkan metode yang digunakan oleh Flather dan Heaps. Skema numerik yang digunakan berdasarkan pada pendekatan derivatif bersudut (angled deriative) yang diperkenalkan oleh Robert dan Weiss (1966) dan diilustrasikan oleh Gambar 8 di bawah ini
Gambar 8. Skema Numerik Derivatif bersudut (Angled-derivative) (Kowalik dan Murty 1993)
Nilai waktu baru berada pada garis atas (garis n+1) dimana ketika perhitungan berada di posisi waktu baru di grid ke-j (j; n+1), nilai di waktu baru pada satu grid sebelum dan setelahnya (j-1; n+1 dan j+1; n+1) telah diketahui dengan arah perhitungan dari kiri ke kanan (upsweep) atau dari kanan ke kiri (downsweep). Suku non-linier uu/x akan memiliki bentuk:
h
n j u n
j u n
j u n
j u n
u
1
1 2 1 1 1
2 1
setelah didiskritisasi melalui beda hingga (finite difference) dengan menerapkan metode yang digunakan oleh Flather dan Heap. Skema numerik yang digunakan ini dinamakan skema 2 langkah waktu (Two time level scheme) karena didalamnya mengandung waktu ke n dan ke n+1. Hasil diskritisasi terlihat implisit dalam waktu namun pada kenyataannya suku
1 1
n
j
17 ) 2 ( 4 1 1 1
uj uj uj
n u
Crean (1978) memodifikasi skema numerik yang dibuat oleh Flather dan Heaps dengan menggunakan persamaan pembangun dalam bentuk integrasi secara vertikal dari dasar sampai permukaan atau perataan kedalaman dimana diskritisasi persamaan momentum 2D suku-x:
2 2 / 1 2 2 ) ( H V U rU dx gH y U V x U U t
U
Akan memiki bentuk:
, − ,
Δt +
⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡
1 , , 2 1 , , 1 , , 2 1 , , 2 1 2 2 1 2 1 j i j i n j i n j i j i j i n j i n j i Hu Hu U U Hu Hu U U x ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤ +
1 , 1 , 1 , 1 , , 4 1 , 1 1 , 1 1 , 1 , , 4 1 1 j i Hv j i n U j i n U j i n V j i n V j i Hv j i n U j i n U j i n V j i n V y= − ∆ u
H'
ℎ in,j1in,j −
2' 2 ' 2 , u H V n j i U t
r
Dimana
2 1 , , 1 , , , di j di j
n j i n j i j i Hu ; 2 2 , 1 , 2 , 1 , 1 , j i d j i d n j i n j i j i Hu 2 1 , , 1 , , 1 , j i d j i d n j i n j i j i Hu 1 , 1 , 1 , 1 , 1 , 1 , 1 , 1 , 4 1
,j di j di j di j di j i j i j i j i j i
Hu
, 1, 1, 1 , 1 , 1, 1, 1 , 1
4 1 ,
1 j di j di j di j di j i j i j i j i j i
Hu
Skema numerik dari Flather dan Heap yang telah dimodifikasi oleh Crean inilah yang kemudian digunakan sebagai treatment terhadap suku-suku non-linier persamaan pembangun Hidrodinamika Pasang Surut Teluk Mayalibit Kabupaten Raja Ampat Provinsi Papua di dalam tesis ini berdasarkan pada kesamaan kasus yang pernah diterapkan (kajian pasang surut Teluk Morecambe oleh Flather dan Heap) dan asumsi yang diterapkan (perataan kedalaman).
2.8. Arus Pengukuran Untuk Validasi Model
18
Gambar 9. Titik tambat pengukuran arus untuk validasi model (bulatan hitam) Pengukuran dilakukan dengan metode tambat (moring) selama 20 jam untuk memantau kondisi arus saat menuju pasang maupun menuju surut. Hasil pengukuran pola arus selama 20 jam menunjukkan bahwa perairan ini memiliki karakteristik pasang surut campuran semidiurnal, sebagaimana yang dinyatakan oleh Wyrtki (1961). Kecepatan dan periode arus saat pasang lebih besar dan lama dibandingkan dengan saat surut. Pengukuran arus ini dilakukan pada kondisi mendekati puncak pasang purnama (Spring Tide). Profil arus pengukuran selama 20 jam menunjukkan kecepatan arus saat pasang dapat mencapai 150 cm/s sedangkan kecepatannya saat surut dapat mencapai 80 cm/s (Gambar 10).
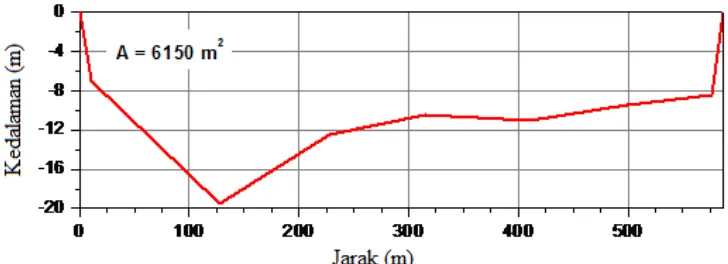
Gambar 10. Karakteristik arus di titik tambat. Nilai kecepatan positif menunjukkan arah masuk ke dalam teluk (kondisi pasang). Hasil perhitungan luas penampang basah di titik tambat adalah sekitar 6150 m2 (Gambar 11) sehingga Teluk Mayalibit pada kondisi pasang memperoleh pasokan debit massa air sebesar 140.10 m3s-1, sedangkan pada kondisi surut mengeluarkan debit massa air sebesar 43.83 m3s-1. Sehingga residual net volume
[image:30.612.107.482.90.279.2]19
Gambar 11. Penampang basah di titik tambat.
[image:31.612.175.503.302.355.2]Tabel 3 di bawah ini menunjukkan statistika dari sirkulasi massa air di titik tambat selama pengukuran.
Tabel 3. Karakteristik arus dan transpor massa air di titik tambat
Pasang Surut
Kisaran kecepatan, cms-1 0 – 156 0 - 81
Debit, m3s-1 140.10 43.83
Periode 6 Jam 4 Menit 5 Jam 16 Menit
3
METODE PENELITIAN
3.1. Waktu dan Tempat Penelitian
[image:31.612.148.472.468.695.2]Wilayah kajian dan daerah model adalah perairan Teluk Mayalibit, Kabupaten Raja Ampat (Gambar 12).
20
…..(15)
…..(16) …..(17)
…..(18) Wilayah perairan ini secara geografis terletak pada koordinat geografi antara 130.520 – 131.250 BT dan 0.010 - 0.440 LS. Penelitian yang meliputi set-up
model, pengolahan data dan analisis dilakukan pada bulan Maret - Juni 2014 di Laboratorium Pengolahan Data Oseanografi IKL-IPB.
3.2. Diskritisasi Persamaan
Persamaan Hidrodinamika pasang surut 2D diselesaikan secara numerik dengan metode beda hingga (finite difference) agar dapat diterjemahkan ke dalam bahasa pemrograman Fortran 90. Suku-suku linier persamaan momentum (pers. 12 dan 13) didiskritisasi menjadi:
- komponen x
n
j i n j i u H x t g Ru n j i U n j i
U , 1 , (1 ) ' , 1 ,
dimana:
2 1 , , 1 , , ' di j dij
n j i n j i Hu
2 ' 2 ' 2 , ; u H V n j i U t r Ru
4 1 , 1 1 , , , 1 ' ; n j i V n j i V n j i V n j i VV
Kecepatan arus rata-rata komponen –x: ,
= ,
- komponen y
n
j i n j i v H y t g Rv n j i V n j i
V, 1 , (1 ) ' 1, ,
dimana :
2 , 1 , , 1 ,' i j
d j i d n j i n j i
Hv
2
' 2 2 ; , ' v H U t r
Rv Vi j
4 1 , 1 , 1 , 1 , ' ; n j i V n j i V n j i V n j i VU
Kecepatan arus rata-rata komponen –y:
, = , ′ Persamaan Kontinuitas: y n j i V n j i V x n j i U n j i U t n j i n j i , 1 , 1 , , , 1 ,
Dimana U dan V adalah kecepatan transport arah-x,y (m/dt). Suku-suku
non-linier didiskritisasi dengan metode finite difference menggunakan skema 2 langkah waktu (two-time level scheme) (model GF2 oleh Crean et al. 2008 dalam Ramming dan Kowalik 1980; Kowalik dan Murty 1983) sebagai berikut :
Suku Non-linier komponen-x:
21 1 , 1 , 1 , 1 , , 4 1 , 1 1 , 1 1 , 1 , , 4 1 1 j i Hv j i U j i U j i V j i V j i Hv j i U j i U j i V j i V y U H V y y U V
Suku Non-linier komponen-y:
j i Hu j i V j i V j i U j i U j i Hu j i V j i V j i U j i U x V H U x x V U , 1 , 1 , 1 , 1 , 4 1 , 1 1 , , , 1 , 4 1 1
j i j i n j i n j i j i j i n j i n j i Hv Hv V V Hv Hv V V y H V y y V V , 1 , 2 , 1 , , 1 , 2 , 1 , 2 1 2 2 1 2 1 2 Dimana:
2 1 , , 1 , , , di j di j
n j i n j i j i Hu
; 2
2 , 1 , 2 , 1 , 1 , j i d j i d n j i n j i j i Hu 2 1 , , 1 , , 1 , j i d j i d n j i n j i j i Hu 1 , 1 , 1 , 1 , 1 , 1 , 1 , 1 , 4 1
,j di j di j di j di j i j i j i j i j i
Hu
, 1, 1, 1 , 1 , 1, 1, 1 , 1
4 1 ,
1 di j i j i j i j i j
j i d j i d j i d j i
Hu
2 , 1 , , 1 , , j i d j i d n j i n j i j i Hv ; 2
, 2 , 1 , 2 , 1 , 1 j i d j i d n j i n j i j i Hv 2 , , 1 , , 1 , 1 j i d j i d n j i n j i j i Hv
, 1, 1, 1 , 1 , 1, 1, 1 , 1
4 1 ,
1 j di j di j di j di j i j i j i j i j i
Hv
di j i j i j i j i j
j i d j i d j i d j i Hv , 1 1 , 1 1 , , , 1 1 , 1 1 , , 4 1 1 ,
1
Seluruh proses diskritisasi numerik persamaan hidrodinamika 2 dimensi secara eksplisit tersebut harus memenuhi kriteria stabilitas Courant-Freiderichs-Lewy
(CFL) (Ramming dan Kowalik 1980; Kowalik dan Murty 1983) :
max 2gH
L
t
dimana : L=min[x,y] dan Hmax=max[d+]. Kriteria kestabilan dipenuhi
dengan membuat model hidrodinamika teluk Mayalibit ini memiliki ukuran sel (L) sebesar 55 m x 55 m dengan langkah waktu (t) sebesar 6 detik.
3.3. Desain Model
22
Tabel 4. Parameter yang digunakan dalam Model Hidrodinamika
Komponen Hidrodinamika Nilai
Jumlah sel/grid x 1450
Jumlah sel/grid y 890
Lebar sel/grid x (∆ ) 50 m
Lebar sel/grid y (∆ ) 50 m
Langkah Waktu 6 detik
Waktu Simulasi 2.592.618 detik (+/- 30hari)
Percepatan Gravitasi (g) 10 m/s
Koefisien gesekan dasar (r) 0.003
phi 3. 141592654
Batas terbuka Selatan dan Timur (elevasi NAOTide/NAO99b) -16 Konstanta harmonik pasang surut untuk kajian elevasi dan arus serta perambatan gelombang pasang surut
- 4 Konstanta harmonik pasang surut (M2, S2, K1, O1) untuk kajian arus residu M2, K1, dan M4 - 1 Konstanta harmonik pasang surut (M2) untuk kajian arus residu M2, K1, dan M4
Batimetri Peta laut DISHIDROS 1996 dan 2001 Data
Data yang digunakan untuk masukan model meliputi data batimetri dan pasang surut. Data batimetri menggunakan peta laut no. 477 tahun 1996 dan no.186 tahun 2001 Kepulauan Raja Ampat yang dikeluarkan DISHIDROS TNI AL. Pasang-surut menggunakan data elevasi dari NAOTIDE/NAO.99b (Matsumoto et al. 2000). Suatu model peramalan pasang surut global dengan resolusi ½o x ½o dan merupakan data asimilasi dari TOPEX/Poseidon selama 5 tahun dengan 16 konstanta harmonik (M2, S2, K1, O1, N2, P1, K2, Q1, M1, J1, OO1, 2N2, Mu2, Nu2, L2, T2). Data pasang surut digunakan sebagai batas terluar model (open boundary condition).
Alat
Posisi stasiun ditentukan dengan GPS GARMIN, Arus untuk validasi model diukur dengan RCM-7 di koordinat 130.9163o BT dan 0.3109o LS dengan penambatan (mooring) pada kedalaman 5 m di bawah permukaan laut selama 20 jam selama EWIN P2O LIPI tahun 2008. Penulisan program untuk set-up model dan simulasi dilakukan di PC dengan OS Windows 7 dengan bantuan bahasa pemrograman Fortran 90. Visualisasi output model menggunakan Surfer 10.
Prosedur Analisis Data
23 komponen-komponen hidrodinamika (langkah waktu, lebar sel, gesekan dasar) dilakukan pada kedua tahap ini sampai diperoleh hasil model yang stabil dan mendekati hasil pengukuran atau kondisi di lapangan.
Validasi dilakukan dengan membandingkan arus pasang surut hasil model dengan hasil pengukuran di titik validasi (Gambar 9) melalui 2 cara yaitu :
- Membandingkan komponen-komponen harmonik arus pasang surut hasil model dengan hasil pengukuran. Pemisahan komponen-komponen harmonik arus pasang surut dilakukan dengan ttide (Pawlowicz et al. 2002). Komponen-komponen harmonik yang dibandingkan adalah Komponen-komponen semidiurnal utama M2 beserta turunannya, yaitu M4, M6, M8, dan M10 mengingat waktu pengukuran arus di lapangan yang kurang dari 24 jam.
- Membandingkan dominasi arah arus di titik validasi
Dominasi arah arus dapat diketahui melalui penggambaran grafik pencar (scatter plot) arus. Sudut kemiringan (inklinasi) dari dominasi arah arus hasil model dan pengukuran ditentukan untuk mengetahui selisih atau deviasinya.
Hasil Simulasi yang telah menunjukkan kestabilan dan mendekati kondisi di lapangan kemudian digunakan lebih lanjut untuk menentukan pola elevasi, arus, perambatan gelombang pasang surut, dan arus residu pasang surut di Teluk Mayalibit. Pola elevasi dan arus hasil model digambarkan secara spasial pada kondisi pasang surut purnama (Spring Tide) dan perbani (Neap Tide) dengan bantuan Surfer 10. Tahapan proses-proses ini digambarkan dalam diagram alir pada Lampiran 1.
Perambatan Gelombang Pasang Surut
Perambatan gelombang pasang surut digambarkan secara spasial dengan menginterpolasi amplitudo dan fasa dari komponen harmonik M2, K1, dan M4-M8 di 25 titik grid pada domain model (Gambar 13) melalui bantuan Surfer 10. Komponen harmonik pasang surut M2, K1, dan M4-M8 tersebut diperoleh dari hasil analisa ttide terhadap data elevasi hasil model selama 1 bulan yang dicuplik setiap jam di titik-titik pengamatan tersebut.
Gambar 13. Titik Pengamatan pola perambatan pasang surut di Teluk Mayalibit
0 BT 0
24
Arus Residu
Pola pergerakan arus residu M2, K1, dan M4 diperoleh dengan mensimulasikan model selama 30 hari dengan forcing 4 komponen pasang surut (M2, S2, K1, dan O1) dan satu komponen pasang surut M2 saja di batas terbuka agar dapat dibandingkan hasilnya. Arus residu ditentukan dengan merata-ratakan hasil keluaran model yang berupa arus pada selang 10 periode terakhir untuk masing-masing komponen M2, K1, dan M4. Arus residu M2, K1, dan M4 yang telah diperoleh kemudian digambarkan secara spasial dengan bantuan Surfer 10
agar dapat diketahui pola-pola pergerakannya. Pola arus residu yang terjadi akan menentukan fate materi-materi di dalam teluk dalam jangka waktu yang lama.
4
HASIL DAN PEMBAHASAN
4.1. Hasil Validasi
[image:36.612.101.483.472.692.2]Perairan teluk Mayalibit memiliki tipe pasang surut semidiurnal condong ke harian ganda (F = 0.46) dengan rentang pasut 1.7 m (Lampiran 3). Hasil validasi model pada umumnya sudah cukup baik dan relevan dibandingkan dengan hasil pengukuran di lapangan. Hal ini dapat dilihat terutama dari beda fasa komponen-komponen kecepatan pasang surut perairan dangkal M4, M6, M8, M10, dan MS4 antara keduanya yang berkisar antara 1.53 – 88.510 atau memiliki beda waktu sebesar 0.6 menit – 3 jam (Tabel 5). Hasil ini menunjukkan bahwa model sudah cukup baik dan mendekati kondisi di lapangan. Perbedaan kecepatan dapat diakibatkan karena posisi titik validasi yang berada di kanal atau jalur sempit dengan topografi yang rumit dimana faktor-faktor non-linier seperti turbulen atau gesekan sangat intens sehingga mengakibatkan perubahan kecepatan arus yang cepat dalam ruang dan waktu (Pond dan Pickard, 1983).
Tabel 5. Konstanta Harmonik arus pasang surut hasil model dan pengukuran
Konstanta
Kecepatan Arus (cm/s)
Fasa (derajat)
Beda Kecepatan
Arus (cm/s)
Beda Fasa
Beda Waktu Pengukuran *M2 81.29 270.21 54.45 88.51 3 jam 3
menit
Model 26.84 181.7
Pengukuran *M4 16.6 178.84 15.99 49.02 51
menit
Model 0.61 129.82
Pengukuran *M6 19.15 332.1 18.99 12.87
9 menit
Model 0.16 319.23
Pengukuran *M8 8.16 241.37 8.04 1.53 0.6
menit
Model 0.12 242.9
Pengukuran *M10 6.19 63.81 5.95 21.1
9 menit
Model 0.24 42.71
Pengukuran *MS4 16.76 341