ANALISIS BIOMEKANIK, STUD1 GERAK DAN WAKTU
PADA PENGOPERASIAN TRAKTOR TANGAN
OLEH
:MUHAMMAD DHAFIR
PROGRAM PASCASARJANA
INSTITUT PERTANIAN BOGOR
ANALISIS BIOMEKANIK, STUD1 GERAK DAN WAKTU
PADA PENGOPERASIAN TRAKTOR TANGAN
MUHAMMAD DHAFIR
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains pada
Program Studi Keteknikan Pertanian
PROGRAM PASCASARJANA
INSTITUT PERTANIAN BOGOR
ABSTRAK
MUHAMMAD DHAFIR. Analisis Biomekanik, Studi Gerak Dan Waktu Pada Pengoperasian Traktor Tangan. Dibimbing oleh SAM HERODIAN dan WAWAN HERMAWAN.
Penggunaan traktor tangan di Indonesia sudah cukup meluas, namun penelitian dari segi ergonominya masih belum banyak dilakukan, temtama mengenai kenyamanan k e j a pada waktu operator mengoperasikannya. Faktor biomekanik dan studi gerak dan waktu merupakan faktor penting yang h a s dipertimbangkan dalam mengoperasikan suatu traktor tangan. Penelitian ini mencoba untuk menganalisis faktor-faktor tersebut terhadap traktor tangan Perkasa 700 GX dengan mengukur besamya gaya-gaya alat kendali traktor tangan tersebut, besamya kebutuhan energi, dan studi gerak dan waktu operator pada saat mengoperasikannya.
Dari hasil penelitian telah diperoleh bahwa untuk mengoperasikan traktor tangan Perkasa 700 GX di lahan sawah termasuk dalam kategori beban k e j a berat. Hal ini disebabkan oleh besamya gaya-gaya yang diperlukan oleh operator untuk n~enggerakkan alat-alat kendali traktor tangan tersebut.
Judul Tesis : Analisis Biomekanik, Studi Gerak dan Waktu pada Pengoperasian Traktor Tangan
Nama Mahasiswa : Muhammad Dhafir
Nomor Pokok : 99306
Program Studi : Ilmu Keteknikan Pertanian (TEP)
Menyetujui,
1. Komisi Pembimbing
r. Ir. Sam erodian MS.
&
Mengetahui,
Dr. Ir. Jdawan Hermawan. MS.
/
AnggotaRIWAYAT HIDUP
Penulis dilahirkan di Banda Aceh Propinsi NAD pada tanggal 30 Maret 1972
dari ayah bernama Drs. H. Abd. Fattah dan Ibu Mulyani sebagai anak kedua dari lima
bersaudara.
Penulis menempuh pendidikan dasar di SDN Teladan Lamnyong Banda Aceh
dan lulus pada tahun 1985. Kemudian menemskan ke SMPN Darussalam Banda
Aceh dan lulus pada tahun 1988. Selanjutnya meneruskan ke SMAN 3 Banda Aceh
dan lulus pada tahun 1991. Setelah lulus SMA, melanjutkan pendidikan tinggi di
Fakultas Teknik Jumsan Mesin Universitas Syiah Kuala Banda Aceh dan lulus tahun
1998. Pada tahun 1999 sampai sekarang menjadi staf pengajar pada Fakultas Teknik
Jurusan Mesin Universitas Abulyatama Banda Aceh. Pada tahun 1999 penulis
PRAKATA
Syukur Alhan~dulillah, segala puji bagi Allah Tuhan semesta alam karena atas
berkat rahmat dan kamnia-Nya penulis dapat menyelesaikan tesis ini dengan judul :
Analisis Biomekanik, Studi Gerak Dan Waktu Pada Pengoperasian Traktor Tangan.
Pada kesempatan ini penulis menyampaikan terima kasih dan penghargaan
yang setinggi-tingginya kepada Bapak Dr. Ir. Sam Herodian, MS. dan Bapak Dr. Ir.
Wawan Hermawan, MS., masing-masing sebagai ketua dan anggota komisi
pembimbing yang telah men~berikan saran, arahan, dan fasilitas mulai dari
perenGanaan hingga selesainya penulisan tesis ini.
Ucapan terima kasih dan penghargaan penulis sampaikan juga kepada Bapak
Dr. Ir. Desrial, M.Eng., yang telah bersedia menjadi dosen penguji luar komisi.
Penghargaan dan terima kasih disampaikan pula kepada :
1. Tim Manajemen Program Doktor (TMPD) Direktorat Jenderal Pendidikan Tinggi
atas pemberian kesempatan belajar pada Progran~ Pascasarjana Institut Pertanian
Bogor serta bantuan biaya pendidikan.
2. Direktur Program Pascasarjana Institut Pertanian Bogor dan segenap staf Pengajar
Program Studi Ilmu Keteknikan Pertanian yang telah membekali ilmu yang dapat
3. Rektor dan Pernbantu Rektor Univertas Abulyatama, serta Dekan Faltultas Teknik
Univertas Abulyatama, beserta seluruh staf dan ka~yawan atas segala bantuan dan
dukungannya.
4. Bapak Abbas Mustafa dan Bapak Wana yang telah banyak me~nberikan bantua~l
teltnis dala~n pembuatan alat percobaan dan dalan~ pengujian alat.
5. Rekan-rekan di Program Studi Illnu Keteknikan Pertanian terutalna Ir. Siti
Suharyatun, MSi. , Ir. Lisyanto, MSi., Ir. Darma, MSi., Drs. Fuad Nasir, MSi., Ir.
Le~nly Saulina, MSi., Ir. Joko Pitoyo, Ir. Ranayanti Bulan, Ir. Mustafril dan Ir.
Suhatmono, MSi.
6. Kakanda Dr. Agussabti, MSi. dan Miftachhuddin, SE yang telah banyak
niemberikan bantua11 non teknis.
7. Kedua orang tua dan saudara-saudaraku serta selurull keluarga atas segala
bantuan dan do'a selama studi.
8. Senlua pihak yang telah banyak membantu baik ~naterial maupun spiritual Ilingga
penelitian dan pe~~ulisan ini dapat diselesaikan.
Penulis sangat ~nenyadari bahwa tulisan ini masih banyak terdapat
lcekurangan, nanlun diharapkan bahwa tulisan ini ada n ~ a ~ l f a a t ~ ~ y a bagi yang
berkepentingan, terutama bagi penulis.
DAFTAR IS1
Halaman
DAFTAR TABEL
...
x DAFTAR GAMBAR...
xi DAFTAR LAMPIRAN...
xii PENDAHULUAN ... 1Latar Belakang ... 1
. .
Tujuan Penel~tlan
...
3 TINJAUAN PUSTAKA ...Traktor Tangan
...
Koilstruksi dan Penggunaan Traktor Tangan
...
7...
Pengukuran Gaya Dengall Prinsip Regangan (strail1 gages) 10
Energi. Ke j a dau Tenaga ... 11
...
Ergouolni 12
Interaksi Manusia dengan Mesin 14
Biolnekauik ... 18
. . .
Pengukuran Beban Kerja F I S I ~ 21
METODE PENELITIAN ... Teinpat dan Waktu ...
Alat dan Bahan . . ...
Persial~an Peneht~ail ...
Staug Kemudi Pengganti ... Plat Berskala ...
Peislbuata~l dan Kalibrasi Sensor Gaya Penyiapau Lahan ...
...
Pengukurau Gaya pada Alat-alat Kendali Traktor
...
Peugukura~l Gaya dan Energi serta Studi Gerak dau Waktu
dalam Pengoperasian Traktor Tangan . . ...
Ailalisls Data ...
HASIL DAN PEMBAHASAN Hasil Pengukuran Dasar
Hasil Kalil-rrasi Seusor Gaya ... 34 Data Dasar Operator ... 35 Gaya-gaya Alat I(enda1i Traktor Taugan ... 35
Gaya-gaya pada Kopling
Tuas Pengubah Kecepatan 3 5
...
...
Beban Kerja
Beban K e j a Kegiatan Membajak
...
...
Beban Kerja Kegiatan Menggam
...
Beban Kerja Kegiatan 'Menggelebek'
...
Studi Gerak dan Waktu
KESIMPULAN DAN SARAN
...
Kesimpulan...
Saran...
...
DAFTAR TABEL
Halaman 1
.
Jumlah traktor tangan yang ada di beberapa negara RNAM tahun 1990...
62
.
Tingkat k e j a fisik yang diukur yang diukur berdasarkan tingkatpenggunaan energinya (untuk pria dewasa sehat)
...
23...
.3 Data dasar operator 35
4
.
Gaya-gaya pada pengukuran statis...
365
.
Besamya gaya rata-rata operator pada stang kemudi untukmasing-masing kegiatan
...
40DAFTAR GAMBAR
Halaman
1 . Ko111pone11-komponeil uta111a traktor tangan
...
92 . Metode pengolahail tanah sawall untuk petakan yang luas
...
9...
3 . Metode pengolahan tanah sawah untuk petakan y a i ~ g seinpit 10
4 . Kontribusi 11urnan sciertce terhadap ergonomi
...
135 . Sistem nzarz-task ... 15
6
.
Proses pemecahan masalah ole11 inanusia...
16...
7
.
Rata-rata kekuatan anggota tubuh lnanusia untuk pekerjaan tertentu 20...
.
8 Stai~g kemudi penggai~ti 26
9 . Plat berskala ... 27
...
10 . Penyiapan lallan 28
11
.
Metode pembajakan melingkar kontinu 2912 . Pengukuran gaya pada tuas peilgubah kecepatan ... 30
13
.
Pengukurai~ gaya pada tuas kopling inaster ... 3014
.
Pengukurail gaya pada tuas kopliilg belok 30. ...
1 5 Bagan skeinatik pengukuran gaya unluk tneilgei~dalikan stang kemudi 32
.
16 Pemasangan sensor cinciil oktagonal pada slang kelnudi ... 37
17 . Pe~nbajakail tanah di lahan sawah 3 7
...
.
18 Rata-rata gaya operator pada stailg kenludi saat nleinbajak 39
20
.
Rata-rata gaya operator pada stang kemudi saat 'menggelebek'...
21
.
Kebutuhan energi operator pada kegiatan membajak...
22
.
Kebutuhan energi operator membajak dari detik ke 630 sampai 788...
23
.
Kebutuhan energi operator pada kegiatan menggaru...
24.
Kebutuhan energi operator menggaru dari detik ke 115 sampai 355...
25
.
Kebutuhan energi operator pada kegiatan 'menggelebek'...
...
26
.
Kebutuhan energi operator 'menggelebek' dari detik ke 45 sampai 24527
.
Gerakan operator saat membajak lurus...
DAFTAR
LAMPIRAN
Halama11
1
.
Spesifikasi traktor tangan Perkasa 700 GX ... 54...
2
.
Spesifikasi bajak singkal 55. .
3
.
Spesifikasi garu slslr...
554 . Spesifikasi gelebek
...
55...
5 . Pemasangan strain gages pada sensor cincin oktagonal 56
6
.
Skema pengkalibrasian sensor arah X...
577 . Skema pengkalibrasian sensor arah Z
...
578 . Timbangan pegas
...
589 . Data hasil kalibrasi sensor gaya arah X
...
5910 . Data hasil kalibrasi sensor gaya arah Z
...
6011 . Data hasil kalibrasi strain an~plifier
...
6012
.
Hubungan antara gaya dan regangan arah X pada kalibrasi sensor gaya...
61.
...
13 Hubungan antara gaya dan regangan arah Z pada kalibrasi sensor gaya 61
14 . Hubungan antara regangan dan tegangan pada kalibrasi strain anzplzfier
...
6215
.
Data hasil pengukuran gaya-gaya operator pada stang kemudi saatmembajak
...
63 16.
Data hasil pengukuran gaya-gaya operator pada stang kemudi saal...
menggaru 66
17
.
Data hasil pengukuran gaya-gaya operator pada stang kemudi saat'menggelebek'
...
6918
.
Data denyut jantung operator pada pekejaan membajak rnenggaru....
19. Time studi sheet pada saat membajak
...
73PENDAHULUAN
Latar Belakang
De~lgan makin menyusutnya temak penggarap sawah dan pindahnya tenaga
lcerja dari desa ke kota ataupun ke pusat-pusat industri maka mekanisasi pertanian
pada uillumnya d a l khususnya mekanisasi dalain pengolahan twah berkembang
dengan baik. Di sanping itu dengan ditemukannya bibit unggul (telutanla padi)
dengan waktu tumbuh yang relatif pendek, maka petani berusaha memperpendek
walctu-waktu kel-ja laimlya dengan cara mekanisasi. Sasaran utama adalah
nlenlperpendek waktu pengolahan tanah di s a ~ ~ l p i n g waktu lainnya. Salah satunya
adalah dengan menggunakan traktor tangan sebagai sumber tenaga pengolah tanah.
Penggunaal traktor tangan di Indonesia sudah cukup meluas, namun penelitian
dari segi ergonominya masih belum banyak dilakukan, terutama mengenai
kenyamanan kerja pada waktu operator mengoperasikalmya. Traktor tangan dinilai
sesuai dengan kondisi pertanian di Indonesia yang umulllnya mempuliyai petak-petak
lahan yang relatif kecil. Selain itu dari segi ekonomi, harga traktor tai~gan relatif lebih
mural1 dibandingkan dengall jenis-jenis traktor yang lain seperti traktor roda empat
dan tralctor roda rantai.
Sebagiail besar alat dan mesin yang digunalcan dalam bidang pertanian
dirancang dan dibual berdasarkan ukuran fisik pekerja Eropa dan Anlerika yang
~llerupakan negara produsen mesin-mesin perlailiaan modern. Pada kenyataannya,
pekerja Eropa dan Amerika, tetapi juga digunaka~l dalam pertanian di negara-negara
lain, telnlasuk pertanian Indonesia.
Pada kondisi te~fentu penggunaall mesin-mesin impor yaug dirancang da11
dibuat berdasarkan ukuran fisik pekerja Eropa dan Amerika sering lnellilnbulkan
kesulitan bagi pekerja lokal saat pelaksanaan kerja bempa mellumnuya unjuk kerja
mesin, kelelahan pada operator yang memuugkinkan terjadi kecelakaan kerja. Untuk
menghindari kondisi tersebut, Hu~nalz Elzgineerilzg atau Ergo~zonzic perlu diterapkan.
Ergonomika merupakan bidang ilmu yang meninjau manusia dari aspek
keteknikan dan sistem dalam hubungalnlya dengan fasilitas dan lingkungan tempat
kerja. Agar petani dapat bekerja dengan baik setelah menggarap laha~lnya maka pada
saat bekerja dengan traktor diusahakan tidak terlalu banyak pemborosan energi akibat
dari kurang nyamannya pengoperasiaan. Untuk itu traktor tangan perlu diraucallg
supaya lebih sesuai dengan kondisi fisik operator Indonesia serta hal-ha1 yang
~neni~nbulkall kelelahan dapat dikurangi.
Untuk mencapai efisiensi dan produktivitas kerja yang maksimal, maka
antropometri dan biomeka~lik dalam keadaan statis lnaupun dinamis saat bekerja
perlu disesuaikan dengall pekerja lokal. Hal ini tidak saja berguna pada saat
pe~lgoperasiaan mesin, tetapi juga untuk desain alat dan mesin yang aka11 diprodttksi
di Indonesia. Di samping itu lingkungau yang dapat mengakibatkan beban kerja atau
segi tata letak perlengkapan serta ukuran ruang uutuk kenyamanan, keamanan,
kesehtan dau efisiensi kerja, memiliki banyak faktor menarik untuk diteliti
Studi gerak dan waktu merupakan aspek yang penting di bidang ergonomika,
baik berdiri sendiri maupun sebagai penunjang penelitian yang lain. Fungsi utama
dari studi ini adalah untuk efisiensi gerak dan waktu agar tercapai produktivitas yang
seoptimal mungkin.
Pada studi gerak diperhatikan secara keseluruhan sistem mulai dari input
sarnpai output, sedangkan pada studi gerak dipelajari segala gerak-gerik operator saat
bekerja. Prinsip-prinsip dalam studi gerak mencakup prinsip ekonorni, sesuai dengan
aspek antropometri dan sesuai dengan alat.
Melalui studi ini, akan dieleminir gerak yang tidak perlu, menggabungkan
kegiatan yang mungkin, mengatur kembali susunan yang ada dan penyederhanaan
sehingga efisiensi perbaikan k e j a tercapai (Mc. Comic, 1970).
Tujuan Penelitian ini dilaksanakan dengan tujuan :
1. Menganalisis besarnya gaya-gaya dinamik alat-alat kendali traktor tangan pada
saat bekerja di lapangan.
2. Menganalisis studi gerak dan waktu operator pada pengoperasian traktor tangan
TINJAUAN PUSTAKA
Traktor Tangan
Traktor tangan (hand tractor) atau lazim juga dikenal dengan traktor roda dua
(two-wheel tractors) beserta implemennya merupakan salah satu jenis mesin
pertanian yang telah dikenal dan digunakan secara luas oleh para petani. Alasan
digunakamya traktor secara luas adalah karena harganya terjangkau dan
pengoperasiannya mudah. Oleh karena itu, para petani terutama petani yang
kebanyakan memiliki lahan kecil telah banyak beralih dari tenaga temak ke traktor
tangan. Penggunaan traktor tangan dapat untuk melakukan berbagai macam peke rjaan
di lapangan, tergantung kepentingan dan implemen yang digunakan. Walaupun pada
umumnya produktivitas traktor tangan lebih rendah dari traktor roda empat,
kemampuannya jauh melebihi tenaga temak sehingga dapat menghemat waktu tenaga
dan biaya. Penggunaan traktor tangan terutama sangat bermanfaat bagi para petani
dengan luas lahan 2 - 3 ha atau kurang (Sakai, 1998).
Penggunaan. traktor tangan secara luas oleh para petani tentunya mendukung
pertanian nasional dan juga memberikan andil besar tidak hanya terhadap
peningkatan industri manufaktur mesin-mesin pertanian, dalam ha1 ini industri yang
memproduksi traktor tangan, natnun juga dapat mentransfonnasikan corak pertanian
yang bersifat sub-sisten ke pertanian komersial.
Traktor tangan dikenal dengan berbagai nama yaitu : hand tractor, two-wheel
tracto,; dl]. Traktor jenis ini dapat melakukan berbagai macam kerja, tergantung
kebutuhan dan implemen yang disambungkan ke traktor, namun terutama digunakan
untuk mengolah tanah. Alat pengolah tanah atau bajak digandengkan atau dipasang
pada bagian belakang traktor pada bagian yang disebut implemen. Traktor tangan
dengan pengolah tanah rotari mempunyai efisiensi yang tinggi karena pemotongan
dan pembalikan tanah dapat dikejakan pada waktu yang bersamaan (Sakai, 1998).
Ditinjau dan segi implemennya, traktor tangan dapat dibagi menjadi dua tipe
yaitu : (a) tipe untuk lahan kering (upland field) dan (b) tipe untuk lahan sawah
(paddy field). Namun perlu ditambahkan bahwa sebagian besar traktor tangan
dipemntukkan bagi lahan persawahan. Sedangkan berdasarkan ukuran mesin yang
digunakan, traktor tangan dapat diklasifikasikan menjadi :
a. ~ i t i i - t i f f e ~ type (2-3 PS = 1,5 - 2,2 kW) yang merupakan jenis traktor tangan
terkecil. Jenis ini disebut juga motor tiller atau wheel less cultivalor dan
digunakan hanya untuk hobi dan tidak untuk kegiatan pertanian profesional
karena getarannya terlalu tinggi.
b. Traction type (4-6 PS = 2,9 - 4,4 kW) yang digunakan untuk membajak dan
transportasi dengan trailer. Jenis ini dapat digunakan untuk niulti purpose dengan
penyesuaian attachr,ient. Semua pekejaan yang sebelumnya dilakukan dengan
tenaga ternak dapat dilakukan dengan menggunakan jenis ini.
c. Dual ilye (5-7 PS = 3,7 - 5,2 kW) yang inerupakan ukuran internlediat antara
traclion type dengan drive type. Peinbajakan dun tiarrow rotary tillage dapat
dilakukan dengan tipe ini. Kemanlpuan pembajakan tipe ini lebih rendah dari
d. Drii~e type (7 - 14 PS = 5,2 - 10,3 kW) yang lnengolah tanah dengan
menyalurkan tenaga mesin (er~gitiepolverj secara mekanik ke alat pengolah tanah
yang dipasang di belakang ke dua roda traktor. Tipe ini diperuntukkan khusus
untuk mengolah tanah.
e. Thai type (8 - 12 PS = 5,9 - 8,s kW) yang dikembangkan secara lokal di Thailand
dan mempunyai struktur sederhana dengan menggunakan mesin diesel
berpendingin air. Jenis ini kuat untuk membajak dan menarik trailer, tetapi
kemampuannya untuk multiguna rendah karena terialu berat (Sakai, 1998).
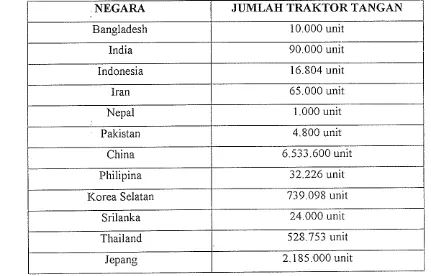
Pada tahun 1990, jumlah traktor tangan yang terdapat di beberapa negara
RNAM (Sakai, 1998) ditampilkan pada Tabel 1
Tabel 1. Jumlah traktor tangan yang ada di beberapa negara RNAM tahun 1990 (Sakai, 1998)
NEGARA JUMLAH TRAKTOR TANGAN
I Bangladesh I 10.000 unit India I
90.000 unit I
Indonesia
I
1
Pakistan 4.800 unit
1
16.804 unit Iran
I
I
China 6.533.600 unit
1
65.000 unit
Nepal 1.000 unit
[image:124.595.100.531.418.694.2]Jumlah traktor tangan yang ada di Indollesia sampai tahun 1997 adalah 74.893
unit. Padahal kebutuhan traktor tangan secara nasional dengan luas lahan sawah yang
dikerjakan 8.490.042 ha adalah sekitar 531.538 unit. Ini berarti kebutuhan traktor
tangan masill kurang sekitar 456.645 unit (Sugondo, 1999). Hal ini merupakan
peluang dan tantangan bagi industri manufaktur, khususnya industri traktor tangan
untuk lebih berperan aktif dalall~ nleningkatkan kemampuan produksi sehingga
kekurangan yang ada dapat terpenuhi.
Refonnasi di bidang pertanian di negara-negara Eropa dan Amerika didukung
dengan penggunaan traktor roda empat dan ada kecenderunga~l pada kedua region
tersebut bahwa traktor tangan hanya digunakan sebagai hobi. Sedangkan di banyak
llegara Asia, traktor tangan inulai digunakan pada tahun 1960-all dan junllah
pelnakainya terus meningkat sampai saat ini (Sakai, 1998).
Konstruksi dan Penggunaan Traktor Tangan
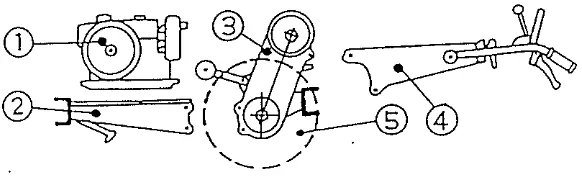
Menurut Sakai (1998), traktor tangan terdiri dari komponen-komponen utalna
sebagai berikut (Gambar 1) :
1. Motor
Tralctor tangan tipe tarik biasanya nler~ggunakan motor bakar bensin belpendingin
udara sebagai sumber tenaganya, sedangkan traktor tangan tipe penggerak dan
2. Dudukan motor dengan titik gandeng
U~nunnlya dudukan motor dibaut kencang dengall ruluah gigi dan selun~lulya
didukung oleh standar depan tipe lipat yang ditempatkan di ujung depail dudukan
motor.
3. Rumah gigi transmisi termasuk kopling master dan titik gandeng belakang
4. Alat-alat kendali traktor tangan yang terdiri dari
(1) Tuas pengubah kecepatan yang berhngsi untuk mengatur kecepatan maju dan
lnundur traktor tangan. Pada traktor tangan yang diuji terdapat 6 variasi
kecepatan maju dan 2 variasi kecepatan mundur yang masing-inasing
kecepatan berguna untuk pekerjaan-pekerjaan tertentu.
(2) Tuas kopling master yang berfungsi untuk menyalurkan tenaga dari mesin ke
gear box untuk selanjutnya diteruskan ke roda traktor tangan.
(3) Tuas kopling belok yang berfungsi untuk membelokkan axah traktor ke kiri atau ke kanan, juga berfungsi untuk menghentikan traktor jika dilekan
keduanya sekaligus.
(4) Stang ke~nudi yang berfungsi sebagai bagian pengetldali jalannya traktor
tangan ole11 operator.
5. Roda
Disamping menggunakan roda ban untuk pengoperasian di lahan atau untuk
transportasi pada jalan umum, ada berbagai jenis roda bukan ban yang dapal
dipergunakan untuk berbagai jenis pengoperasian di lahan anlara lain : pipe
dipergunakan untuk lahan padi sawah karena mempunyai daya apung yang tiilggi
[image:127.595.172.463.173.271.2]pada Iahan berlumpur.
Gambar 1. Komponen-komponen utan~a traktor tangan
Ada dua lnetode pengolallan tanah sawah yang menggunakan traktor tangan
uiltuk petakan yang luas (Sakai, 1998), yaitu : (a) metode pembajakan bolak-balik
dan (b) metode pembajakan melingkar kontinu (Gamnbar 2)
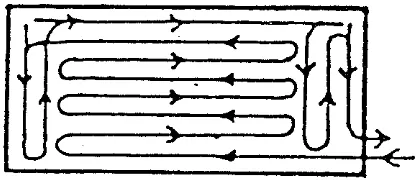
Sedangkan untuk petakan yang kecil digunakan metode pembajakan kontinu
[image:128.595.217.427.161.251.2](Gan~bar 3).
Gambar 3. Metode pengolahan tanah sawah untuk petakan yang sempit.
Pengukuran Gaya Dengan Prinsip Regangan (strai~z gages)
Pengukur regangan tahanan listrik (electrical resistance strain gage)
merupakan piranti yang paling banyak dipakai untuk pengukur regangan. Operasinya
berdasarkan pada prinsip bahwa tahanan listrik suatu konduktor berubah bila
mengalami deformasi mekanik. Biasanya pengantar listrik itu disatukan dengan
spesimen dengan bantuan semen isolasi tanpa beban. Kemudian spesimen diberi
beban (gaya), yang menyebabkan terjadinya defonnasi pada spesimen maupun pada
unsur tahanan. Dengall adanya deformasi ini maka akan terjadi perubahan tahanan
listrik pada strain gages, yang kemudian aka11 menimbulkan beda potensial pada
rangkaian (Holman, 1984).
Hubungan antara gaya dan beda potensial aka11 diperoleh setelah dilakukan
Energi, Kerja, dan Tenaga
Beberapa pengertiau dasar yang sangat penting dalam penelitian pengukuran
tenaga (Fox, 19S1), adalah:
1. Energi yang dillyataka11 sebagai kapasitas uiltuk melakukan kerja. Satuail yang
biasa digu~lakan adalah kilo kalori (kkal) dan kilo joule (kj). Bentuk energi secara
umum terbagi dalam enam bentuk yaitu : energi mekanik, panas, cahaya, kimia,
listiik dan ~nuklir. Yang paling penting dalam penelitian ini adalah bei~tuk yang
pertaiua yaitu euergi mekailik dan energi kimia.
2. Kerja yang didefiuisikail sebagai penggunaan gaya melalui jarak tertentu. Satuan
yang digunakan adalah kg-m. Secara ulllum dituliskan dalam bentuk persamaan
sebagai berikut:
W = F D ... (1)
di tnana :
IV = kerja
F = gaya ( catatan, gaya harus konstan)
D = adalah jarak tempuh
3. Tenaga: Tenaga digunakall uiltuk me11jelaskan besamya kerja persatuall waktu,
dapat ditulis dalain persanlaan sebagai berikut:
...
P = kerja I walttu ...( 2)
atau
...
Ergonomi
Ergonomi adalah suatu illnu terapan (applied science) yang bertujuan untuk
mencocokkan (to ittach) antara kebutuhan suatu produk, pekejaan, dan tempat kerja
dengan orang yang menggunakannya. Atau dengan kata lain, ergonomi adalah suatu
ilmu terapan yang mempelajari karakter manusia yang perlu dipertimbangkan dalam
perancangan dan penyusunan sesuatu (thing;) yang digunakan oleh manusia agar
manusia dan sesuatu dapat berinteraksi dengan efektif dan aman (Shanavas, 1987).
Ergonomi bertujuan untuk mengoptimumkan "man-machine-enviro12mentaI-system "
melalui penyesuaian kondisi k e j a dengan sifat-sifat dan psikis manusia. Jadi dengan
ilmu ergonomi akan meningkatkan tidak hanya efisiensi dan produktifitas kerja tetapi
1 , juga meningkatkan keamanan, keselamatan, kesehatan, dan kenyamanan kerja.
i.(
Ergonomi atau yang sering juga dikenal dengan "human e~lgiiteering"
merupakan konsep pencocokan (to match) antara mesin dengan manusia,
perencanaan dan pengorganisasian k e j a agar sesuai dengan kebutuhan dan
kemampuan orang yang mengejakannya. Atau dengan kata lain, ergonomi adalah
suatu bidang ilmu yang mempelajari performance manusia, perilaku, dan training
dalam ~ttan-machine-system, perancangan dan pengembangan >,tan-machijze-system
dan sifat-sifat biologi yang berhubungan, serta pengkajian aspek medis. Dari sudut
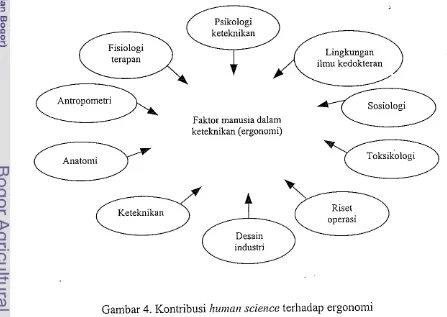
pandang demikian, lzuinan science seperti anatomi, antropometri, fisiologi terapan dl1
seperti digambarkan pada Gambar 4, mempunyai kontribusi besar terhadap
pengembangan ergonomi (Callimacho, 1987).
Istilah ergonotni pertalna sekali diperkenalkan oleh psycologist K.F.H. Munel
dan " I I O I ~ I O S " yang berarti aturan; jadi ergonomi secara harfiah berarti aturan k e j a
atau keterkaitan antara orang dengan lingkungan kerjanya.
Menurut Shanavas (1987), ergonomi adalah suatu ilmu terapan yang bertujuan
untuk mencocokkan (to n~atch) kebutuhan suatu produk, pekejaan, dan tempat k e j a
dengan orang yang menggunakannya. Tujuannya adalah mengoptimalkan man-
n~achilze-environnzeNtal-systenz melalui penyesuaian kondisi k e j a dengan sifat fisik
dan psikis manusia. Melalui ilmu ergonomi, disamping meningkatkan efisiensi dan
produktivitas keja, juga menciptakan kondisi k e j a yang sehat, aman, dan nyanlan
dalan~ lingkungan keja. Ergonomi melalukan ini melalui penelitian dan penerapan
infonnasi dari disiplin hurna~l science
Lingkungan ilmu kedokleran
Antropometri
Sosiologi Faktor manusia dalam
keteknikan (ergonomi)
Anatomi Toksikologi
[image:131.595.78.525.372.689.2]industri
Fokus ergonomi adalah manusia dan kebutuhannya. Dalam ha1 ini yallg hams
dipertimhangkan adalah (a) objek, fasilitas, sistem dan lingkungan yang digunakan
manusia, (b) prosedur kerja dan aktivitas lain yang dilakukan, dan (c) objek, fasilitas,
dll, yang terlihat dan mempengamhi manusia dalam melaksanakan kerja.
Tujuan ergonomi adalah meningkatkan efisiensi kerja dan aktifitas-aktifitas lain
yang dilakukan manusia dan mempertahankan serta meningkatkan kesehatan,
keselamatan, kenyamanan dan kepuasan dalam proses kerja (Shanavas, 1987).
Pendekatan yang dilakukan adalah penerapan secara sistematik dari informasi
yang relevant mengenai kemampuan, sifat-sifat, perilah dan keinginan manusia.
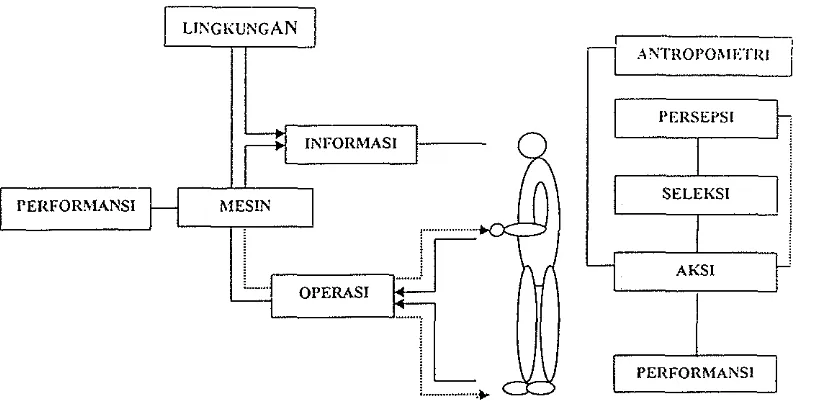
Interaksi Manusia dengan Mesin
Semua mesin bekeja atas koordinasi manusia. dalam sistem man-~~zaclzi~ze-
environnzental, manusia memegang empat peranan dasar yaitu : (a) selaku sumber
tenaga (power sozirce), (b) selaku sensor (as sensor), (c) selaku pengendali (as
controller), dan (d) sebagai pengguna lingkungan kerja (Ullman, 1992).
Performansi suatu alat atau mesin, selain ditentukan ole11 alat (device) atau
mesin (machine), juga ditentukan oleh orang yang mengendalikannya ( ~ p e ~ a t o r ) dan
lingkungan ternpat alat, mesin dan operator bekeja. Lingkungan kerja dapat bempa
lingkungan fisik maupun lingkungan sosial.
Zander (1972) menggambarkan karakteristik multi disiplin sisteln nzun-lusk
I'ERSEPSI
SELEKSI
I
[image:133.602.127.535.117.325.2]I
... UMPAN BALIK
Gambar 5. Sistem nia~z-task (Zander, 1972).
Suatu aliran informasi secara terus-menems diperoleh oleh operator dari mesin
dan lingkungan melalui panca indera atau sense (persepsi). Persepsi dilanjutkan
dengan pengujian di memori yang ditindaklanjuti dengan pengambilan keputusan dari
berbagai altematif yang menjadi arahan suatu pengoperasian tertentu (selectioii).
Output dari manusia adalah kerja otot (action) dan melalui aksi inilah dihasilka~l
performansi. Selama proses ini berlangsung, manusia secara terus-menerus
mengamati pengaruh aksi yang dilakukan dan akan mengambil keputusan dan
tindakan barn agar sistem mencapai tujuannya feedbackproces).
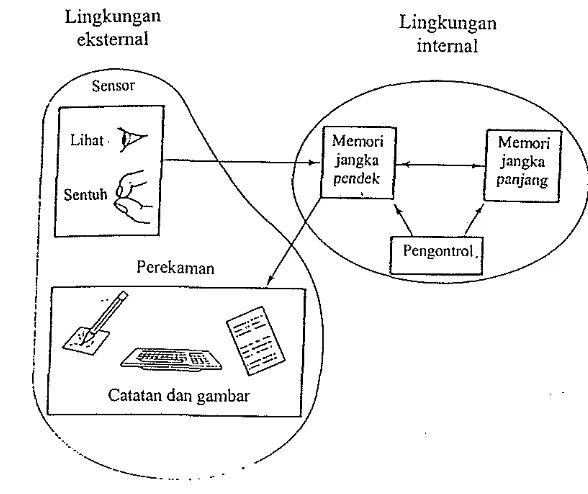
Ullman (1992) menggambarkan model sistem proses informansi (inforniatior~
Lingku~~gan internal
Gambar 6. Proses pemecahan masalah oleh manusia (Ullman, 1992).
Proses infoxmasi berlangsung melalui interaksi dua lingkungan yaitu :
lingkungan internal (informasi disimpan dan diproses dalam otak manusia) dan
lingkungan ekstemal (dapat berupa apa saja yang digunakan manusia untuk
membantu menyelesaikan masalah).
Dewasa ini ergonomi merupakan bagian yang integral dari keselamatan dan
kesehatan di tempat kerja, dan juga untuk meningkatkan kondisi kerja. Penerapan
ergonomi dapat menghasilkan perbaikan k e j a dan menurunkan potensi kecelakaan
kerja dan menumnkan resiko penyakit serta peningkatan kondisi dasar pekejaan.
Iinkungan kerja, maka semestinya dalam proses perancangan suatu peralatall atau
mesin faktor manusia harus dipertimbangltan dengan certnat.
S e n ~ u a mesin bekerja atas koordinasi manusia. Interaksi manusia dengan mesin
atau suatu produk terdiri atas enlpat tipe yaitu : (a) selaku sumber tenaga (power
source), (b) selaku sensor (as sensor), (c) selaku pengendali (as controller), dan (d)
as occopant of ivoi-k space. Keempat tipe interaksi tersebut merupakan aspek uta~na
ltajian ergouomi atau ku~narz ei~gir~eering. Tanlpak dengan jelas bahwa faktor
ma~lusia sangat penting dalam perancangan suatu peralatan, karena faktor rllanusia
selalu berinteraksi dengan peralatan mulai dari tahap produksi olzailufacture),
pengoperasian, pemeliharaan, sampai perbaikan (Ullman, 1992).
Perhatian yang nlendalaln n~engenai faktor manusia merupakan ha1 yang crusial
dalam n~enentukan kualitas dan keselamatan. Suatu produk dikatakan berkualitas
tinggi jika produk tersebut "bekerja sebagaimana mestinya".
Suatu produk dikatakan bekerja sebagaimana mestinya jika produk tersebut
nyaman digunakan yang berarti kecocokan antara alat dan manusia dalarn work space
(aspek antropometri), mudah digunakan yang berarti dibutuhkan daya minimal untuk
menggunaltannya (aspek biomeka~~ik), mudah dioperasikan dan r a ~ n a l i terliadap
pemakai (user fjieitdly). Disan~ping itu ha1 yang tak boleh terlupakan adalah
keselamatan dalam penggunaan. Suatu PI-oduk dikatakan berkualitas jika aman
digunakan.
Pada saat ini mesin-mesin pertanian telah banyak digunakan untuk membantu
proses produksi karena disamping tenaga k e j a di lapangan lnulai berkurang, dengan
ditingkatkan. Akan tetapi disamping dampak positif tersebut, pada saat yang
bersamaan dijumpai beberapa masalah baru seperti meningkatnya jumlah kecelakaan
kerja dan timbulnya gangguan kesehatan akibat getaran, kebisingan, polusi, dll.
Biomekanik
Gaya yang dikeluarkan anggota tubuh manusia berkaitan erat dengan data
antropometri. Biomekanik (mekanika tubuh manusia) mempelajari berbagai aspek
pergerakan fisik dan anggota tubuh. Jadi biomekanik adalah suatu bidang ergonomi
yang berhubungan dengan pengukuran dinamik anggota tubuh manusia, yang di
antaranya menyangkut selang gerak anggota tubuh, kecepatan gerak, kekuatan, dan
aspek anggota tubuh lainnya (Zander, 1972).
Setiap ruas anggota tubuh dapat bergerak sesuai dengan jenis persendiannya
dan besar selang gerak. Gerakan-gerakan tertentu anggota tubuh berkaitan dengan
besamya tenaga yang dikeluarkan.
Beberapa jenis gerak tubuh yaitu :
1. Fleksi siku (dengan tangan terbuka) terkuat pada sudut 90' (efek pengungkit).
2. Ekstensi siku (perentangan lengan terhadap siku) paling kuat jika dimulai dari
fleksi posisi penuh.
3. Rotasi (perputaran) tangan ke arah dalaln paling kuat jika dimulai dengan telapak
tangan berada dalam rotas; ke luar secara penuh (supinasi penuh).
4. Rotasi tangan ke arah luar paling kuat jika dimulai dengan telapak tangan berada
5. Pada pekerjaan mendorong dengan tangan sambil duduk, kekuatan terbesar
didapat pada keadaan siku bersudut 150' - 160' dan dengan pegangan tangan pada
jarak kira-kira 66 cm dari bidang sandaran pinggang.
6. Secara ungkitan, tenaga terbesar berada pada posisi duduk diperoleh jika
pegangan tangan berada pada ketinggian di antara bahu dan siku.
7. Sambil duduk, kekuatan terhadap pedal terbesar, didapat pada fleksi lutut dan
fleksi sendi kaki 120°, sikap istirahat terbesar diperoleh dengan fleksi lutut 105' -
135'.
Pada Gambar 7 diperlihatkan rata-rata kekuatan anggota tubuh manusia pada
I
TERUS MENERUS 8I
SI
(1)DERAJAT FLEKS1 'IKU (derajat) I SO 150 120 90 60
Ki = Kiri ; K a = Kanan
Ganlbar 7. Rata-rata kekuatan anggota tubuh manusia untuk pekerjaan tertentu (Woodson, 1992).
KEKUATAN TANGAN (Lb) (2) TARIK Ki 50 42 34 32 26 Ka 52 56 42 37 24 (3) DORONG
Pengukuran Beban Kerja Fisik
Pengukuran beban kerja fisik dapat dilakukan dengan tiga cara, yaitu dengan
memperhatikan parameter fisiologi sebagai berikut ( Zander, 1972):
I . Konsumsi Energi
Perubahan karbohidrat, lemak dan protein menjadi energi memerlukan
oksigen dengan demikian konsumsi oksigen dapat dijadikan parameter untuk
pengukuran beban kerja. Dengan mengekivalenkan antara kebutuhan energi dan
kebutuhan oksigen didapatkan hubungan yang nyata antara keduanya. Konsumsi
energi bersih perkegiatan dapat diukur dengan jalan menguranginya dengan energi
yang dibutuhkan untuk metabolisme basal.
2. Laju Ventilasi dan Frekuensi Pernafasan
Laju pernafasan akan seirama dengan laju denyut pax-paru 'penghisap
oksigen. Dengan mengetahui laju denyut dan frekuensi paru-paw dapat dihitung
besamya konsumsi oksigen dan akhirnya dapat dihitung tingkat beban kerjanya.
3. Denyut Jantung
Pengukuran beban kerja fisik dengan denyut jantung adalah cara yang
termudah untuk dilakukan sehingga cocok untuk pengukuran kegiatan di lapang
(Hayasi, Moriizumi dan Jin, 1997).
Denyut jantung mempunyai korelasi yang tinggi dengan penggunaan energi
(konsumsi oksigen). Tetapi denyut jantung tidak hanya dipengamhi oleh beban
kerja fisik, melainkan dipengaruhi juga ole11 bcban kerja mental. Karena ha1 inilah
Untuk meilgkonversi denyut jantung meiijadi konsunisi oksigen dapat
digunakan persanlaali hasil penelitian Oki (1994) sebagai berikut :
Y = -1,4259
+
0,0207X+ 0,0202A...
(4)di maria :
Y =
laju koilsumsi oksigen (liter/inenit)X =
denyut jantung (pulsa/~nenit)A = luas penllukaan tubuh = W 0,444 $ 0,663
*
88,83*
(m2)W= berat tubuh (kg)
H= tinggi badan (m)
Untuk mengliitung daya dipergunakan persainaan (Oki, 1994) :
P = 4,75
"
1' ... ( 5 )di inana :
P = energi yang dikeluarkan (kkallmenit)
4,75 = asu~nsi nilai konversi pada R Q (perbandingan kadar C02 dan
O2 sisa pe~llafasan) 0,76.
Y = laju konsumsi oltsigen (literlmenit).
4. Suliu Tubuh
Efisiensi penggunaan tenaga manusia untuk tenaga ~nekanis nlaksimuin
atlalali 20 %, sebagian besal- sisanya kelual- dalaln bentuk panas. Peningltalan
beban k a j a altan mcnaikkan suhu tubuh, oleh Itarena sifal ini malta suliu ~ L I ~ L I ~
dapat dijadikan sebagai indikator pengukuran beban kerja fisik. Pada pelterja yang
dengan laju peningkatan konsumsi oksigen. Sifat ini dapat dijadikan indikasi
pengukuran hen/ st~.e.ss.
Berdasarkan pengujian dengan menggunakan parameter tersebut dibuat tabel
untuk menentukan tingkat kerja yang dilakukan (Tabel 2)
Tabel 2. Tingkat kerja fisik yang diukur yang diukur berdasarkan tingkat penggunaan energinya (untuk pria dewasa sehat)
1
beratMETODE PENELITIAN
Tempat dan Waktu
Penelitim ini dilakukan Jurusan Teknik Pertanian, Iilstitut Pertanian Bogor.
Peinbuatan sensor dan pengukuran gaya pada alat-alat kendali traktor (statis)
dilakukan di Laboratorium Alat dail Mesin Budidaya Pertanian. Peilgukuran
kebutuhan gaya dan tenaga dalain pengoperasian traktor tangan dilaksailakan di
sawah percobaan Jurusan Teknik Peltmian. Pe~~golahan data, analisis kebutuhan
tenaga, analisis gerak d a i ~ tvaktu pengoperasian traktor tangail dilakukail di
Laboratoriuln Ergonomika dan Elektronika Pertanian. Penelitian berlangsung selama
lebih kurang enam bulan dari bulan September 2001 sanlpai dengan bulan Maret
2002.
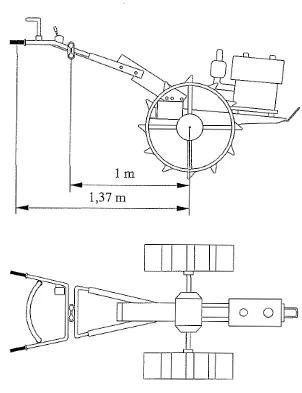
Alat dan Bahan
Pada penelitian iili digunakan sebuah traktor tangail ((merek : Perkasa 700 GX,
tenaga 8,5 hp) untuk pengujian kebutuha11 gaya dan tenaga dalaim pengoperasiannya.
Spesifikasi teknis dari traktor tersebut disajikan dalam Lalnpiran 1. Implerne~l yang
digunakan dalalu pengujian pengolahan failall sawall adalah (1) bajak singkal, (2)
garu sisir, d a i ~ (3) gelebek. Gainbar d m spesifikasi dari implemen-implemen tersebut
Instrumen-instrumen yang digunakan ddalam penelitia~i iiii adalah : (1) sensor
gaya tipe cincin oktagonal, (2) bridge box-, (3) strain anzplzfier, (4) multi~ileter digital,
(5) c~aalog to rligital converter (ADC), (6) konlputer, (7) heartrate mo~zitor, (8) data
recorcler, (9) video can~era, (10) ti~ilballgall pegas, dati (I 1) stop ~)atch .
Bahan-balian yang digunakan untuk pe~ilbuata~i sensor gaya tipe cincin
oktagonal adalah : (1) balok baja, (2) strain gages, ( 3 ) str-ail1 gages te1-17zinn1, datl (4)
perekat. Bahan untuk pereka~nan data adalah : (1) video cassette 8 nznz dan (2) kaset
tape recorder. Sedangkan bahan untuk pembuatan stang kemudi pengganti adalah besi
pipa 11, 1 iliclii dengall panjang 6 meter.
Persiapan Penelitian
Persiapan yang dilakukan a~itara lain : (I) pe~nbnatan stailg kenludi pengganti,
(2) pe~iibuatan plat berskala, (3) pembuatan dan kalibrasi sensor gaya tipe cinci~l
oktagonal, da11 (4) persiapa11 sawali percobaan.
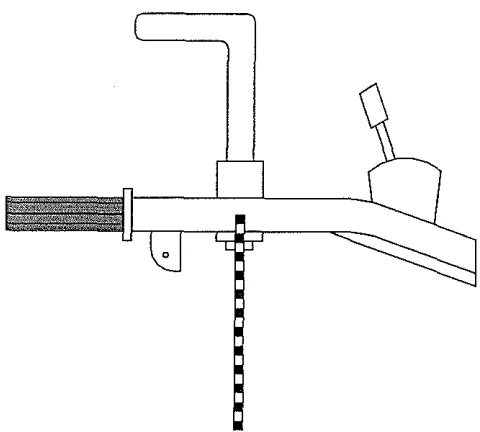
Stang Kemudi Pengganti
Sebuah stang keniudi dengall bentuk khusus dibuat ulituk pengukuran gaya-
gaya dalanl ii~enggerakkan stang ke~nudi mengunakan sensor yaya tipe cincin
oktagonal. Ukuratl dari statig kemudi pengganti tersebut sania dengan ulturan stang
Itemudi aslinya. Gaiiibar konstruksi stang kenludi da11 posisi pelllasailgan sensor
Gambar 8. Stang kemudi pengganti.
Plat Berskaia
Peinbuatan plat berskala bertujuail untuk lnemudahkal~ dalam menganalisa
gerak kopling pada hasil rekaman di video. Plat berskala ini merupakan plat besi yang
diwarnai hitam dan putih sepanjang 23 crn dengah jarak antanvama 1 cm. Plat iili
Gambar 9. Plat berskala.
Pembuatan dan Kalibrasi Sensor Gaya
Sebuah sensor gaya tipe cincin oktagonal dibuat untuk mengukur gaya yang
bekerja pada stang kemudi (dalam tiga arah). Badan sensor dibuat dari bahan besi
dengan panjang 120 mm, lebar 34 mm, dan tinggi 39 mm. Untuk mendeteksi
regangannya digunakan empat buall strain gages (Kyowa tipe
KFG-I
-1 20-CI -1 lN15C2). Konstruksi sensor, posisi penempatan straitz gages dan perangkaiannya
disajikan pada Lampiran 5.
Sensor tersebut kemudian dikalibrasi untuk mengetahui hubungan antara gaya
dan regangan yang terjadi pada sensor. Kalibrasi dilakukan pada dua arah gaya, yaitu
arah lateral (sumbu-X) dan arah normal (sumbu-2). Skema pengkalibrasian sensor
tersebut disajikan pada Lampiran 6 dan 7. Kalibrasi sensor gaya dilakukan dengan
secara tegak lurus pada sensor, lalu strain keluaran untuk setiap beban dicatat.
Pemasangan instrumen ukur untuk kalibrasi adalah strain gages, bridge box, handy
strain meter (Kyowa, UCAM- 1A). Nilai strain dibaca pada handy strain meter.
Kemudian dilakukan kalibrasi terhadap strain ainplz$er untuk mendapatkan
hubungan antara strain (sumbu-X) dan tegangan (sumbu-Y). Pemasangan instrumen
ukur untuk kalibrasi adalah straiiz gages, bridge box, straiiz anzplzfier (Kyowa, DPM-
60 3 A), dan multimeter digital.
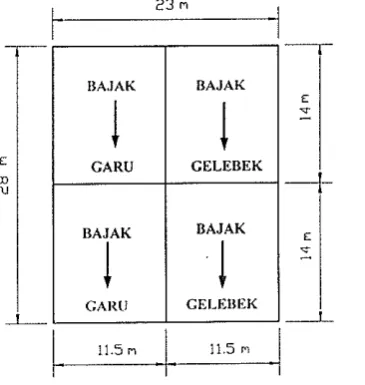
Penyiapan Iahan
Untuk pengukuran kebutuhan energi pengoperasian traktor tangan dalam
pengolahan tanah disiapkan sebidang sawah berukuran panjang 28 m dan lebar 23 m.
Sawah tersebut dibagi menjadi empat petak percobaan masing-masing berukuran
panjang 14 m dan lebar 11,5 m. Dua petak untuk pengukuran gaya arah depan-
belakang dan kanan-kiri, dua petak lagi untuk pengukuran arah depan-belakang dan
atas-bawah (Gambar 10).
[image:146.595.240.423.467.660.2]2 3 n
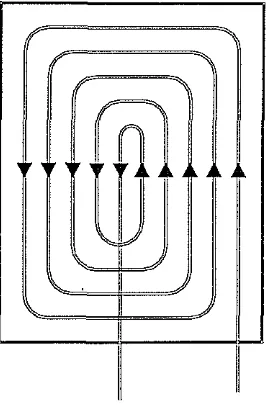
Sedangkan metode pembajakan yang digunakan pada penelitian ini adalah
[image:147.599.255.388.136.339.2]metode pembajakan melingkar kontinu (Gambar 11).
Gambar 11. Metode pembajakan melingkar kontinu.
Pengukuran Gaya pada Aiat-alat Kendali T r a k t o r
Pengukuran gaya dilakukan pada saat traktor tangan dalam keadaan berhenti
(statis). Alat-alat kendali traktor tangan yang diukur kebutuhan ggaa untuk
~nenggerakkannya adalah : tuas pengubah kecepatan, tuas kopling master dan tuas
kopling belok. Pengukuran gaya dilakukan dengan timbangan pegas (Lampiran 8)
dan dengan pengulangan linla kali.
Mekanislne pengukuran gaya-gaya tersebut masing-masing dapal dilihat pada
Gambar 12. Pengukuran gaya pada tuas pengubah kecepatan.
Gambar 13. Pengukuran gaya pada tuas kopling master.
Pengukuran Gaya dan Energi serta Studi Gerak dan Waktu dalam Pengoperasian Traktor Tangan
Pengukuran gaya untuk mengendalikan stang kemudi dilakukan pada saat
traktor tangan dalam keadaan beroperasi mengolah tanah. Pengukuran gaya dilakukan
dengan sensor gaya tipe cincin oktagonal yang dipasang pada stang kemudi pengganti
(Gambar 15). Pengukuran gaya pada stang kemudi ini dilakukan pada arah
atas(+)ibawah(-), depan(+)/belakang(-) dan kanan(+)/kiri(-). Pengukuran gaya
terhadap stang kemudi ini dilakukan pada tiga macam kegiatan pengolah tanah
menggunakan (a) bajak singkal, (b) gam sisir, dan (c) gelebek.
Pengukuran kebutuhan energi pengoperasian traktor tangan dilakukan dengan
mengukur denyut jantung operator menggunakan heartrate monitor. Pengukuran
denyut jantung operator tersebut meliputi empat kondisi (kegiatan) yaitu : (1) pada
saat membajak, (2) pada saat menggaru, (3) pada saat 'menggelebek', dan (4) pada saat jalan di sawah.
Analisis beban kerja dilakukan dengan menggunakan batasan penggunaan
energi untuk orang Indonesia yang dikeinukakan oleh Jumadias dan Sunawang
(1970). Penggunaan energi selama 8 jam kerja untuk kerja ringan adalah 750 kkal
(1,6 kkallmenit), untuk kerja sedang adalah I100 kkal (2,3 kkallmenit) dan untuk
kerja berat adalah 2200 kkal(4,6 kkallmenit).
Selama pengoperasian traktor tangan, semua gerakan operator direkam
Konrcrsi Dnri D.lla Analog kc Data Dizital
Analisis Data
1. Data gaya-gaya alat kendali pada pengukuran statis yaitu kopling belok, kopling
master dan tuas pengubah kecepatan dibandiugkan dengan data sekunder rata-rata
kekuatan ta~lgan manusia.
2. Dari data pengukuran denyut jantung untuk kegiatan membajak, menggaru, dan
'menggelebek' yang diperoleh, selanjutnya dikurangi dengan data denyut jantung
operator pada saat berjalan. Selisihnya adalah denyut jantung operator untuk
menggerakkan alat kendali traktor tangan. Untuk mengkonversi data denyut
jantung menjadi energi digunakan persamaan (4) d m (5).
3. Dari hasil rekaman video kamera dan data gerakan operator dianalisis pola gerak
HASIL DAN PEMBAHASAN
Hasil Pengukuran Dasar
Hasil Kalibrasi Sensor Gaya
Data hasil kalibrasi sensor gaya tipe cincin oktagonal disajikan pada Lampiran
9 dan 10. Dari kalibrasi diperoleh hubungan regangan dengan gaya arah sumbu-X dan
arah sumbu-Z masing-masing sebagai benkut.
F,= 3,22638- 0,671
...
(6)...
Fz = 3,45938- 9,1884 (7)
dalam ha1 ini : F, adalah gaya arah sumbu-X (N), F, adalah gaya arah sumbu-Z (N),
E adalah regangan pada sensor (VE). Regresi linier dari hasil kalibrasi untuk arah
sumbu-X memiliki nilai R' = 0,9992 dan untuk arah sumbu-Z melniliki nilai RZ =
0,9974.
Data hasil kalibrasi strain anzplIfier disajikan pada Lampiran 11, dan persamaan
yang diperoleh dari hasil kalibrasi strai~z anzpl13er adalah :
...
E = 193,09V - 2,2929 (8)
di mana ~ a d a l a h regangan pada strain unzpl~fier ( p ~ ) dan 'b adalah tegangan yang
Data Dasar Operator
Data dasar yang penting dari operator adalah data antropometrinya, di mana
berguna dalam pengukuran selanjutnya maupun dalam penentuan beban yang tepat
untuk operator.
Gaya-gaya Aiat Kendali T r a k t o r Tangan Tabel 3. Data dasar operator
Gaya-gaya pada Kopling Master, Kopling Belok, dan T u a s Pengubah Kecepatan Nama
Wana
Pada Tabel 4 ditampilkan gaya-gaya pada pengukuran statis yaitu untuk alat-
alat kendali kopling master, kopling belok, dan tuas pengubah kecepatan. Gaya-gaya
alat kendali tersebut dibandingkan dengan tabel gaya rata-rata kekuatan tangan
manusia.
Dari Tabel 4 terlihat bahwa besamya gaya-gaya alat kendali tersebut sudah
sesuai dengan rata-rata kekuatan tangan manusia kecuali untuk gigi mundur dan tarik
tuas ke "J" untuk posisi jalan biasa.
TB : tinggi badan, tb : tinggi bahu, pl : panjang lengan, pk : panjang kaki, lb : lebar bahu, BB : berat badan
[image:153.595.126.511.220.350.2]Tabel 4. Gaya-gaya pada pengukuran statis
Alat Kendali
/No
Kopling belokRata-rata Tangan
Nonnal ke atas
/
78,41
249,2Gigi 1 Gigi 2 Gigi 3 Gigi mundur
Tarik tuas ke
"J"
untuk posisi jalanGaya-gaya pada Stang Kemudi
Alat kendali traktor tangan pada pengukuran dinamis ini adalah stang kemudi.
Arah gaya yang diukur adalah kanan(+)/kiri(-), atas(+)/bawah ( - dan
depan(+)/belakang(-).
Pada Gambar 16 dan 17 bertumt-tumt ditampilkan pemasangan sensor cincin
oktagonal pada stang kemudi untuk mengukur gaya-gaya dinamis dail pembajakan
tanah di lahan sawah.
Besamya rata-rata gaya operator pada stang kemudi ditampilkan pada Gambar
18, 19, dan 20. Dalam ha1 ini, gaya arah kanan, atas dan depail bemilai positif. Data
besarnya gaya-gaya operator pada stang kemudi untuk masing-masing kegiatan
Ganbar 16. Pemasangan sensor cincin oktagonal pada stang kemudi.
Dari Garnbar 18, 19, dan 20 terlihat bahwa operator perlu memberikan gaya ke
atas untuk menahan implemen yang masuk lebih dalam ke tanah yang lunak.
Sedangkan gaya ke bawah diperlukan untuk menancapkan atau menekan implemen
agar dapat masuk ke dalam tanah.
Gaya-gaya arab depan-belakang diperlukan oleh operator untuk menyesuaikan
kecepatan traktor dengan kecepatan jalannya. Kaki operator yang sering terbenam ke
dalam tanah dan slip roda traktor menyebabkan ketidakserasian dalam kecepatan
traktor dan operator.
Gaya-gaya arah kanan-kiri diperlukan operator untuk menahan gaya
menyamping pada stang kemudi traktor tangan yang terjadi akibat mengolab tanah
dengan menggunakan implemen-implemennya.
Gaya-gaya depan-belakang saat membajak lebih kecil dibandingkan dengan
saat meiiggaru dan 'menggelebek' karena pada saat menggaru dan 'menggelebek' telah
terjadi pelumpuran sehingga kaki operator lebih terbenam ke dalam. Sedangkan gaya-
gaya atas-bawah untuk bajak, garu dan gelebek hampir sama, kecuali untuk bajak
yang lebih besar pada saat belok-U. Hal ini disebabkan pada saat belok-U operator
kadang-kadang perlu mengangkat bajak untuk membelok karena lintasannya yang
-
1 MEMBAJAK
I
[image:157.599.143.498.111.325.2] [image:157.599.135.513.398.605.2]Lurus Belok 90' Belok-U
Gambar 18. Rata-rata gaya operator pada stang kernudi saat mernbajak
MENGGARU
Kanan ~~p
-- .- ... .- .. - . -
:-m-@j-m
0-N-I
. - .- -
-. .
MENGGELEBEK
Gambar 20. Rata-rata gaya operator pada stang kemudi saat 'menggelebek'.
Tabel 5. Besamya gaya rata-rata operator pada stang kemudi untuk masing-masing
kegiatan Kegiatan Membajak Arah Lums Belok 90' Bdok-U Menggaru Menggelebek Lurus Belok 90' Belok-U
Gays
(N)
Beban Kerja
Untuk memperoleh penggunaan energi operator selama melakukan kerja, data
denyut jantung operator dimasukkan ke persamaan (4) dan (5). Data denyut jantung
operator selengkapnya ditampilkan di Lampiran 18.
Beban Kerja Kegiatan Membajak
Pada Gambar 21 diperlihatkan kebutuhan energi operator saat membajak yang
diperoleh dari hasil perhitungan. Energi untuk menggerakkan alat-alat kendali
tersebut diperoleh dengan cara mengurangi energi saat membajak dengan energi saat
jalan di sawah. Tingkat beban ke j a operator termasuk dalam katagori kerja berat.
Besamya tingkat beban kerja operator saat membajak sangat dipengaruhi oleh
besamya gaya-gaya alat kendali traktor tangan yang hams digerakkan oleh operator
terutama stang kelnudi yang selalu digunakan oleh operator.
MEMBAJAK
7
.
-
- ,I: 1 ,
O! r n i,, ,i
o
i.,.
,A
.ir
a
.A,a
..i-
1-irn
I
WaMu (detik)
[image:159.602.76.533.495.639.2]-
Pada Galnbar 18 telah diperlihatkan besamya gaya-gaya pada stang ke~nudi tersebut.
Pada Gambar 21 dapat dilihat bahwa untuk menggerakkan alat-alat kendali tersebut
memerlukan energi yang cukup besar.
Pada Gambar 22 diperlihatkan besamya energi pada kegiatan membajak dari
detik ke 630 ke detik 788, untuk melihat perbedaan kebutuhan energi saat lnembajak
lurus dan saat membelok. Terlihat bahwa pada saat membelok tejadi peningkatan
kebutuhan energi dibandingkan dengan saat membajak lurus. Hal ini disebabkan
karena selain gaya untuk mengendalikan stang kemudi juga diperlukan gaya untuk
menekan tuas kopling belok. Di samping itu juga karena pada saat belokan operator
hams bejalan lebih cepat untuk menyesuaikan dengan kecepatan belok traktor.
Besamya gaya untuk menekan tuas kopling belok dapat dilibat pada Tabel 4 yang
telah diuraikan terdahulu, sedangkan besamya frekuensi penekanan rata-rata tiga kali
sekali belok dengan lama sekali tekan rata-rata tiga detik.
1
MEMBAJAK1
Belok
8.6 8.4
.-
8.2
-
ij 8x
5 7.8
.- $ 7.6
': 7.4 7.2
630 640 650 660 670 680 690 700 710 720 730 740 750 760 770 760 790 600
[image:160.599.139.503.461.618.2]Waktu (detik)
Bebail Kerja Kegiataii Meuggaru
Gambar 23. Kebutuhan energi operator pada kegiatan menggaru.
Pada Garnbar 23 diperlihatkan kebutuhan energi operator saat menggaru yang
diperoleh dari hasil perhitungan. Energi untuk menggerakkan alat-alat kendali
tersebut diperoleh dengan cara mengurangi energi saat inenggaru dengan energi saat
jalan di sawah. Tingkat beban k e j a operator termasuk dalam katagori kerja berat.
Besamya tingkat beban k e j a operator saat menggaru sangat dipengaruhi oleh
besarnya gaya-gaya alat kendali traktor tangan yang barus digerakkan oleh operator
terutaina stang keinudi yang selalu digunakan ole11 operator. Pada Gambar 19 telah
diperlihatkan besamya gaya-gaya pada stang keinudi tersebut. Pada Gambar 23 dapat
dilihat bahwa untuk nlenggerakkan alat-alat kendali tersebut inemerlukan energi yang
cukup besar.
Pada Gainbar 24 diperlihatkan besamya energi pada kegiatan inenggaru dari
detik ke 115 ke detik 355, untuk melihat perbedaan kebutuhan energi saat menggaru
lurus dan saat inembelok. Terlihat bahwa pada saat inembelok terjadi peningkata~l
kareila selain gaya untuk n~engendalikan stang kemudi juga diperlukan gaya untuk
lneilekan tuas kopling belok. Di samping itu juga karena pada saat belokan operator
hams berjalail lebih cepat untuk menyesuaikan dengan kecepatan belok traktor.
Besanlya gaya untuk menekan tuas kopling belok dapat dilihat pada Tabel 4 yang
telah diuraikan terdahulu, sedangkan besamya frekuensi penekanan rata-rata tiga kali
sekali belok dengan lama sekali tekan rata-rata tiga detik.
MENGGARU
7.6
Beiok Bebk Belok
I
I
Waktu (detik)I
[image:162.595.139.501.256.441.2]1 I
Gambar 24. Kebutuhan energi operator menggaru dari detik ke 115 sampai 355.
Beban Kerja Kegiatan 'Menggelebek'
'MENGGELEBEK' 1 8
-
.-E ;
% 5
3 4
.-
P 3
z
2",
1Waktu (detik)
Besamya tingkat beban kerja operator saat 'menggelebek' sangat dipengaruhi
oleh besamya gaya-gaya alat kendali traktor tangan yang harus digerakkan oleh
operator terutarna stang kemudi yang selalu digunakan oleh operator. Pada Gambar
20 telah diperlihatkan besamya gaya-gaya pada stang kemudi tersebut. Pada Gambar
25 dapat dilihat bahwa untuk menggerakkan alat-alat kendali tersebut memerlukan
energi yang cukup besar.
Pada Gambar 26 diperlihatkan besamya energi pada kegiatan 'menggelebek'
dari detik ke 45 ke detik 245, untuk melibat perbedaan kebutuhan energi saat
'menggelebek' lurus dan saat rnembelok. Terlihat bahwa pada saat membelok terjadi
peningkatan kebutuhan energi dibandingkan dengan saat 'menggelebek' lurus. Hal ini
disebabkan karena selain gaya untuk mengendalikan stang kemudi juga diperlukan
gaya untuk menekan tuas kopling belok. Di samping itu juga karma pada saat
belokan operator harus berjalan lebih cepat untuk menyesuaikan dengan kecepatan
belok traktor. Besamya gaya untuk menekan tuas kopling belok dapat dilihat pada
Tabel 4 yang telah diuraikan terdahulu, sedatlgkan besamya frekuensi penekanan
7.6
Belok Beiok Belok Belok Belok
7.4 ,
.
. . . ,Garnbar 26. Kebutuhan energi operator 'menggelebek' dari detik ke 45 sampai 245.
Pada Tabel 6 diperlihatkan besamya kebutuhan energi rata-rata untuk masing-
masing kegiatan.
Membajak
Menggaru
'Men