TRANSMISI DATA MENGGUNAKAN INFRAMERAH SEBAGAI
DETEKTOR BANJIR SECARA WIRELESS PADA KOLAM
BUDIDAYA IKAN LELE
TUGAS AKHIR
EFRANITA MANIK
052408077
PROGRAM STUDI FISIKA INSTRUMENTASI D3
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : TRANSMISI DATA MENGGUNAKAN INFRA MERAH SEBAGAI DETEKTOR BANJIR
SECARA WIRELESS PADA KOLAM BUDI DAYA IKAN LELE
Kategori : TUGAS AKHIR Nama : EFRANITA MANIK Nomor Induk Mahasaswa : 052408077
Program Studi : D-3 FISIKA INSTRUMENTASI
Departemen : MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, Juli 2008
Diketahui/disetujui oleh :
Ketua Program Studi Dosen Pembimbing D-3 Fisika Instrumentasi
PERNYATAAN
TRANSMISI DATA MENGGUNAKAN INFRAMERAH SEBAGAI DETEKTOR BANJIR SECARA WIRELESS PADA KOLAM BUDIDAYA
IKAN LELE
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing – masing disebutkan sumbernya.
Medan, Juli 2008
ABSTRAK
PENGHARGAAN
Atas berkat dan anugerah Tuhan Yang Maha Esa penulis mengucapkan Puji dan Syukur kepada-Nya atas segala kasih dan karunia-Nya yang telah dilimpahkan kepada penulis, sehingga penulis dapat melaksanakan Tugas Akhir yang berjudul “TRANSMISI DATA MENGGUNAKAN INFRAMERAH SEBAGAI DETEKTOR BANJIR SECARA WIRELESS PADA KOLAM BUDIDAYA IKAN LELE”
Sesuai kurikulum yang berlaku di Universitas Sumatera Utara, bahwa setiap mahasiswa D-III Fisika Instrumentasi harus mengerjakan sebuah Tugas Akhir di semester VI. Adapun tujuan diadakannya Tugas Akhir ini adalah untuk pengembangan pemahaman dan pengaplikasiannya dengan ilmu yang diperoleh di bangku kuliah. Tugas Akhir ini juga merupakan salah satu syarat untuk memperoleh gelar Ahlimadya di jurusan Fisika Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
Dengan selesainya proyek yang saya laksanakan, saya tidak lupa mengucapkan terima kasih banyak kepada :
1. Bapak Dr. Eddy Marlianto, Msc selaku dekan Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas Sumatera Utara.
ii
3. Bapak Drs. Syahrul Humaidi, Msc selaku ketua Program Studi D-III Fisika Instrumentasi, Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
4. Ibu Dra. Diana Barus selaku dosen pembimbing yang telah banyak memberikan bimbingan dan arahan selama pelaksanaan Tugas Akhir ini.
5. Seluruh staff pengajar dan staff pegawai administrasi di lingkungan departemen Fisika Instrumentasi, Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas Sumatera Utara.
6. Orang tua penulis yang telah banyak mendidik, berdoa dan berkorban baik secara moral maupun materil kepada penulis.
7. Rekan-rekan mahasiswa/I Fisika Instrumentasi yang telah banyak memberikan dukungan khususnya stambuk 2005.
Penulis menyadari bahwa di dalam penyusunan Tugas Akhir ini masih banyak kekurangan-kekurangan. Untuk itu, penulis mengharapkan saran dan kritik dari pembaca yang sifatnya membangun demi penyempurnaan Tugas Akhir ini.
Akhir kata penulis mengucapkan terima kasih kepada semua pihak, semoga Tugas Akhir ini berguna bagi kita semua.
Medan, Juni 2008
4.8 Pengujian Rangkaian Penguat Sinyal 43 4.9 Prinsip Kerja Pendeteksi Banjir 44 4.10Aplikasi pendeteksi Banjir Pada kolam Ikan Lele 45
Bab 5 Kesimpulan dan Saran 48
5.1 Kesimpulan 48
5.2 Saran 49
Daftar Pustaka 50
Lampiran 51
DAFTAR TABEL
Halaman
Tabel 4.1 Tabel Waktu Eksekusi 32
Tabel 4.2 Tabel Data Yang Dikirim ke Port Serial 33
Halaman
Gambar 2.1 IC Mikrokontroller AT89S5 9
Gambar 2.2 8051 Editor, Assembler, Simulator ( IDE ) 13 Gambar 2.3 ISP-Flash Programmer 3a 15
Gambar 3.1 Diagram Blok 16
Gambar 3.2 Rangkaian Power Supply 17
Gambar 3.3 Rangkaian Mikrokontroller AT89S51 18 Gambar 3.4 Rangkaian Display Seven Segment 20 Gambar 3.5 Rangkaian Sensor dan Penguat sinyal 23
Gambar 3.6 Rangkaian Display LED 24
Gambar 3.7 Rangkaian Pengirim Data Melalui Inframerah 25 Gambar 3.8 Rangkaian Penerima Data Melalui Inframerah 27
BAB 1 PENDAHULUAN
1.1Latar Belakang Masalah
Kebutuhan manusia terhadap peralatan yang cerdas dan dapat bekerja secara otomatis
semakin meningkat, sehingga peralatan-peralatan otomatis ini sedikit demi sedikit
mulai menggantikan peralatan manual. Selain sistem kerjanya yang sama, peralatan
otomatis dapat melakukan pekerjaannya sendiri tanpa harus dikendalikan oleh
pengguna.
Untuk merancang sebuah peralatan yang cerdas dan dapat bekerja secara
otomatis tesebut, dibutuhkan sebuah alat/komponen yang dapat menghitung,
mengingat, dan mengambil pilihan. Kemampuan ini dimiliki oleh sebuah komputer
(PC), namun tidaklah efisien jika harus menggunakan komputer hanya untuk
keperluan tersebut diatas. Untuk itu komputer dapat digantikan dengan sebuah
mikrokontroler. Mikrokontroler merupakan sebuah chip atau IC yang di dalamnya
terdapat sebuah prosessor dan flash memori yang dapat dibaca/tulis sampai 1000 kali,
sehingga biaya pengembangan menjadi murah karena dapat dihapus kemudian diisi
kembali dengan program lain sesuai dengan kebutuhan.
Salah satu alat otomatis yang sangat diperlukan ketika musim penghujan tiba
metode wireless.Dengan kata lain alat ini menggunakan inframerah sebagai pengirim
dan penerima data. Jadi di sini tidak diperlukan lagi peninjauan langsung ke lapangan
untuk mengetahui kondisi suatu area, apakah tempat tersebut mengalami banjir atau
tidak, tetapi cukup dengan menggunakan alat pendeteksi banjir.
Atas dasar pemikiran di atas, akan dirancang sebuah alat pendeteksi banjir
dengan metode wireless yang dapat membaca/mengenali keadaan suatu area tanpa
perlu peninjauan langsung ke lapangan. Dimana pendeteksi banjir ini akan
memberikan isyarat yang dibagi menjadi 3 level yaitu level siaga, wapada dan
awas.Dimana isyarat ini dihasilkan berdasarkan level ketinggian air yang di deteksi
oleh sensor ketinggian air. Selain itu data dari pendeteksi banjir ini akan dikirim oleh
pemancar inframerah ke penerima inframerah tanpa perlu peninjauan langsung ke
lapangan. Sehingga ini akan sangat memudahkan dan membantu masyarakat dalam
menghindari bencana banjir.
I.2. Rumusan Masalah
Berdasarkan uraian diatas, penulis tertarik untuk mengangkat permasalahan tersebut
kedalam bentuk paper sebagai Tugas Akhir dengan judul “ Pendeteksi Banjir
Komunikasi Wireless Berbasis AT89S51
Pada alat pendeteksi banjir ini akan digunakan 2 buah mikrokontroller yang
merupakan otak dari semua sistem yang ada di dalam rangkaian ini. Dengan
menggunakan 2 buah kabel yang berdampingan sebanyak 6 sensor yang dibagi
3
Untuk menguatkan tegangan yang dihasilkan oleh sensor akan digunakan
penguat sinyal yang juga mengubah tegangan analog menjadi digital sehingga mampu
dibaca oleh mikrokontroller. Setiap perubahan ketinggian air yang diterima oleh
sensor akan ditampilkan dalam 3 display yaitu display sevent segment, LED dan
alarm. Karena komunikasi yang digunakan adalah komunikasi wireless atau tanpa
kabel, maka akan digunakan pemancar dan penerima inframerah. Pemancar akan
mengirimkan data ketinggian air dari mikrokontroller menuju penerima inframerah
dan inframerah juga akan menampilkannya dalam display atau tampilan.
I.3 Tujuan Penulisan
Tujuan dilakukan Tugas Akhir ini adalah sebagai berikut:
1. Memanfaatkan mikrokontroler AT89S51 sebagai pusat kendali dari sebuah
sistem yang cerdas.
2. Memanfaatkan sensor untuk membaca keadaan suatu lingkungan
3. Sebagai salah satu syarat untuk memperoleh gelar Ahlimadya di
Universitas Sumatera Utara
4. Memanfaatkan inframerah sebagai alat pengirim data jarak jauh
5. Membuat sebuah alat yang dapat mendeteksi banjir secara otomatis dan
mengirimkan datanya dengan menggunakan metode wireless.
I.4 Batasan Masalah
Mengacu pada hal diatas, saya membuat alat yang dapat mendeteksi banjir dengan
metode wireless dengan batasan-batasan sebagai berikut :
2. Mikrokontroller yang digunakan jenis apa dan bagaimana mikrokontroller
mampu mengolah setiap data yang dihasilkan oleh sensor.
3. Komunikasi yang digunakan adalah komunikasi wireless yaitu memanfaatkan
inframerah sebagai transmisi data. Bagaimana inframerah mampu mengirim
BAB 2
TINJAUAN PUSTAKA
2.1PERANGKAT KERAS
2.1.1 Arsitektur Mikrokontroler AT89S51
Arsitektur AT89S51 sudah memiliki beberapa komponen yang pada masa lalu
merupakan chip tersendiri, sub komponen tersebut adalah :
• CPU, singkatan dari Central Processing Unit, adalah otak atau unit pemroses
pada suatu MCU. Istilah CPU yang salah kaprah dalam dunia PC adalah satu
box yang terdiri dari banyak komponen.
• Internal Oscillator yang memungkinkan pemakai hanya menambahkan sebuah
quarz crystal yang biasanya nilainya berkisar antara 6 Mhz hingga 24 Mhz.
Meskipun demikian dari datasheet, AT89S51 dapat bekerja dari frekuensi 0
hingga 24 Mhz.
• Interupt Control, suatu bagian yang mengatur prioritas interupsi dari luar atau
dari dalam chip MCU
• Timer 1 dan Timer 2 adalah bagian yang dapat berfungsi sebagai pencacah
pulsa masuk atau menentukan waktu (counter time)
• RAM adalah memori yang digunakan untuk menyimpan data sementara ( data
• Flash, adalah jenis memori yang digunakan untuk menyimpan program dan
data yang tetap, data pada memori tidak akan hilang bila catu daya padam.
• Bus Control, digunakan sinyal kendali akses data keluar dari system MCU.
• I/O Port digunakan untuk menjembatani antara system MCU dengan dunia
luarnya dengan cara parallel. I/O bisa sebagai output, misalnya menggerakkan
relay, menyalakan lampu, dapat juga sebagai input misalnya mendeteksi
saklar, menerima data dari ADC.
• Serial Port adalah penghubung ke dunia luar MCU dengan cara serial, dengan
port serial, MCU dapat berkomunikasi dengan PC yang juga harus melalui
serial Port.
AT89S51 sudah memiliki memory flash di dalamnya sehingga sangat praktis
digunakan untuk bereksperimen. Beberapa kemampuan fiturnya adalah sebagai
berikut :
• Memiliki 4K Flash Perom yang digunakan untuk menyimpan program. Flash
dapat ditulis dan dihapus sebanyak 1000 kali (menurut manual)
• Tegangan operasi dinamis dari 2,7 Volt hingga 6 Volt
• Operasi clock dari 0 hingga 24 Mhz
• Program bisa diproteksi, sehinnga tidak bisa dibaca oleh orang lain
• Memiliki internal RAM 128 byte
• Memiliki I/O sebanyak 32 line
• Dua buah timer/counter 16 bit
• Menangani 6 sumber interupsi
7
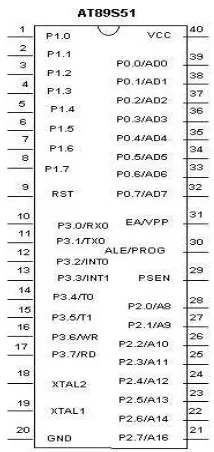
2.1.2 Kontruksi AT89S51
AT89S51 memiliki pin sebanyak 40, dalam kemasan PDIP maupun PLCC.
Keterangan fungsi masing – masing pin adalah sebagai berikut :
Pin 40 Vcc, masukan catu daya +5 volt DC
Pin 20 Vss, masukan catu daya 0 volt DC
Pin 32 – 39 P0.0-P0.7, Port input/output delapan bit dua arah yang juga
dapat berfungsi sebagai bus data dan bus alamat bila
mikrokontroller menggunakan memori eksternal.
Pin 1-8 P1.0-P1.7, port input/output dua arah delapan bit dengan
internal pull up
Pin 10-17 P3.0-P3.7, port input/output delapan bit dua arah, selain itu port
3 juga memiliki alternatif fungsi sebagai ;
RXD (pin 10) Port komunikasi input serial
TXD (pin 11) Port komunikasi output serial
INT0 (pin 12) Saluran interupsi eksternal 0 (aktif rendah)
INT1 (pin 13) Saluran interupsi eksternal 1 (aktif rendah)
T0 (pin 14) Input Timer 0
T1 (pin 15) Input Timer 1
WR (pin 16) Berfungsi sebagai sinyal kendali tulis
Port I/O dari AT89S51 merupakan saluran untuk menghubungkan keluar
sistem, misalnya mengambil data atau mengirimkan data, menghidupkan LED atau
menerima data dari switch.
Port 0
Port 0 berfungsi ganda selain sebagai port masukan/keluaran data byte atau bit secara
umum juga dipergunakan untuk fungsi lain yaitu sebagai Alternate Input Function
Port 1
Proses penulisan pada port 1 adalah penulisan akan memberikan data bit melalui
internal bus, yang terhubung dengan D pada suatu Delay Flip-flop, disini D Flip flop
berfungsi sebagai latch atau gerendel yang menahan data D selama sinyal Clock tidak
aktif
Port 2
Port 2 berfungsi ganda yaitu sebagai port I/O biasa, selayaknya port P1, sudah
mempunyai resistor ke vcc. Funsi lain adalah sebagai penyalur alamat byte tinggi saat
MCU mengakses program atau data di memori luar
Port 3
Port 3 memiliki fungsi ganda, selain sebagai port masukan/keluaran data byte atau bit
9
Gambar 2.1. IC Mikrokontroler AT89S51
2.2PERANGKAT LUNAK
2.2.1 Bahasa Assembly MCS-51
Jika ragam pengalamatan adalah pengelompokan berdasarkan orientasi lokasi memori,
tipe-tipe instruksi adalah pengelompokan berdasarkan fungsi pada instruksi MCS-51
yaitu :
• Arithmatika
• Instruksi Logika
• Transfer Data
• Manipulasi dan Operasi Boolean
1. Instruksi Aritmatika
Instruksi-instruksi menunjukkan ragam pengalamatan yang dapat digunakan
dengan masing-masing instruksi.
a. Penjumlahan
Source (sumber) adalah operand dengan ragam pengalamatan, register
indirect, indirect atau immediete.
b. Incremental dan Decremental
Data didalam memori internal dapat dinaikkan atau diturunkan
(Incremental dan Decremental), tanpa melalui akumulator, demikian
juga pada DPTR yang digunakan untuk menghasilkan pengalamatan 16
bit di memori eksternal.
c. Perkalian
Instruksi MUL AB mengalikan akumulator dengan data yang ada pada
register B dan meletakkan hasil 16 bit ke dalam register A dan B.
Register A berisi lo-byte dan register B berisi hi-byte. Bila hasilnya
lebih besar dari 255 (0FFh), maka bit 0V set, sedangkan bit CY selalu
akan di clearkan (‘0’).
d. Pembagian
Instruksi DIV AB membagi isi akumulator dengan data dalam register
B dan meletakkan hasil bagi (quotient) 8 bit dalam akumulator dan
sisanya (reminder) 8 bit dalam register B. Operasi DIV akan membuat
bit-bit CY dan OV menjadi ‘0’.
e. Desimal Adjust
Instruksi DA A (Decimal Adjust) digunakan untuk operasi arithmatic
11
diikuti oleh sebuah operasi DAA untuk menjadikan hasilnya terdapat
pada sistem BCD.
2. Instruksi Logika
Instruksi Logika pada MCS-51 adalah melakukan operasi boolean (bit) yang
terdiri dari AND, OR, EXOR dan NOT pada bit demi bit dalam suatu bit data
di register.
a. Operasi AND, OR, dan EXOR
Operasi AND, OR dan EXOR (Exclusive OR) adalah operasi bit
dengan tabel kebenaran.
b. Rotate
Instruksi Rotate seperti pada shift register, bit-bit dalam byte register A
digeser ke kanan atau ke kiri melalui atau tidak melalui carry.
c. SWAP
SWAP adalah tukar nibble dari byte akumulator, nibble rendah ditukar
dengan nibble tinggi.
3. Data Transfer
MOV adalah proses move (pindahkan) data dari sumber ke tujuan yang
sebenarnya adalah proses mengcopy, artinya data di sumber tidak berubah.
a. Memory Internal
MOV adalah copy data dari source ke destination atau sumber ke
tujuan, semua memory internal dan SFR dapat berlaku sebagai source
b. Program Memory
MOVC adalah perintah move code bit, mengcopy isi dari program
memory (aktivasi dengan PSEN) dilokasi yang ditunjukkan oleh base
register yaitu DPTR atau PC.
c. Data Memory
MOVX adalah perintah move eksternal, digunakan untuk mengcopy isi
dari dan ke data memory.
d. Proses Stack
PUSH (pushing berarti mendorong) dan POP (popping berarti
menyembulkan kembali) adalah perintah yang digunakan untuk
‘menyelamatkan’ data karena register yang bersangkutan akan
digunakan untuk proses lain, atau untuk mengingat alamat yang
ditinggalkannya akibat adanya panggilan sub rutin atau adanya
interupsi.
e. Pertukaran Data
XCH adalah exchange atau pertukaran data antara kumulator dengan
byte yang ragam pengalamatannya bisa secara direct, register atau
indirect.
4. Pencabangan Program
Program Assembler bersifat sekuensial, seperti pada program basic klasik
(awal mula basic), dan biasanya diperlukan pencabangan untuk tujuan tertentu,
13
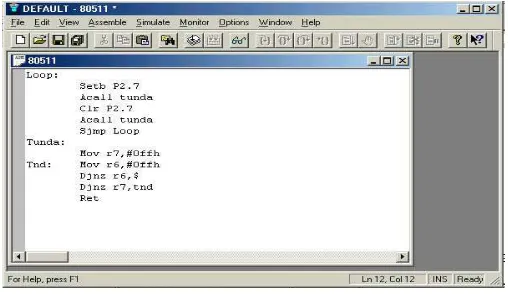
2.2.2. Compiler dan Simulator
Ada banyak produk simulator dan kompiler yang informasinya dapat dicari di internet, melalui search engine dengan kata kunci MCS-51, 8051, Compiler atau
Simulator, akan muncul banyak situs yang menyediakan simulator atau kompiler. Ada
yang garus beli, ada juga yang gratis.
Selain ASM 51 dari Metalink, juga terdapat compiler AD 2500, Keil dan
Franklin untuk compiler bahasa C. Simulator ada banyak seperti AVSIM (DOS),
JSIM, Pds-51, TS Controls. WinAlds dari MicroLogic salah satu produk yang
memberikan fasilitas multi compiler, suatu komputer untuk beberapa
prosesor/microkontroler, disamping itu juga ada fasilitas simulator untuk MCS-51.
Gambar 2.2. 8051 Editor, Assembler, Simulator (IDE)
2.2.3 Pemrograman AT89S51
Pemrograman AT89S51 adalah prosedur mengisi flash memory dengan program yang
pengendali utama perlu diambil dari sistem dan diletakkan dalam programmer untuk
diisi.
Prosedur pengisian flash memory yang juga termuat dalam data sheet akan
dijelaskan pada bagian ini. Prosedur pengisian flash, masing-masing pin akan
berfungsi sebagai berikut :
• Pin Vcc diberi catu 5 V, XTAL dapat dari 3 hingga 24 MHz, sebaiknya
digunakan 12 MHz atau 11.059 MHz.
• Port P1+port P2.0 hingga P2.3 adalah jalur alamat 12 bit (0000h-0FFFh).
• Port P0 digunakan sebagai jalur data ( 8 bit ).
• Pin P2.6,P2.7,P3.6 dan P3.7 digunakan sebagai mode pemrograman.
• Pin ALE digunakan untuk pulsa pemrograman ( pulsa negatif )
• Pin EA digunakan untuk level tegangan pemrograman ( 5 V dan 12 V )
• Pin RST selalu ‘1’.
Mode dari pemrograman AT89S51, dimana masing-masing kombinasi P2.6, P2.7,
P3.6 dan P3.7 menentukan masing-masing mode, yaitu:
• Write, berarti menulis kode yang di inputkan ke P0 ke memori lokasi yang di
inputkan pada P1 + P2.
• Read, berarti membaca kode dari P0 di lokasi memori yang di inputkan pada
P1 + P2.
• Lock Bit 1, Lock Bit 2 dan Lock Bit 3 berarti memprogram masing-masing
Lock Bit. Fungsi Memprogram lock bit adalah membuat program tidak dapat
dibaca.
• Erase, adalah menghapus isi flash memory secara keseluruhan. Flash hanya
dapat diisi kembali setelah dihapus, dan cara penghapusan adalah secara
15
• Read signature, adalah membaca identifikasi dari ic, masing-masing ic
memiliki id tergantung jenis, pabrik, dan tegangan pemrograman. Pembacaan
signature bisa juga dengan mode read pada alamat 030h.
Gambar 2.3 Isp Flash Programmer
Setelah program selesai ditulis, kemudian di-save dan kemudian di-Assemble
(di-compile). Pada saat di-assemble akan tampil pesan peringatan dan kesalahan. Jika
masih ada kesalahan atau peringatan, itu berarti ada kesalahan dalam penulisan
perintah atau ada nama subrutin yang sama, sehingga harus diperbaiki terlebih dahulu
sampai tidak ada pesan kesalahan lagi.
Software 8051IDE ini berfungsi untuk merubah program yang kita tuliskan ke
dalam bilangan heksadesimal, proses perubahan ini terjadi pada saat peng-compile-an.
BAB 3
PERANCANGAN ALAT DAN BAHAN
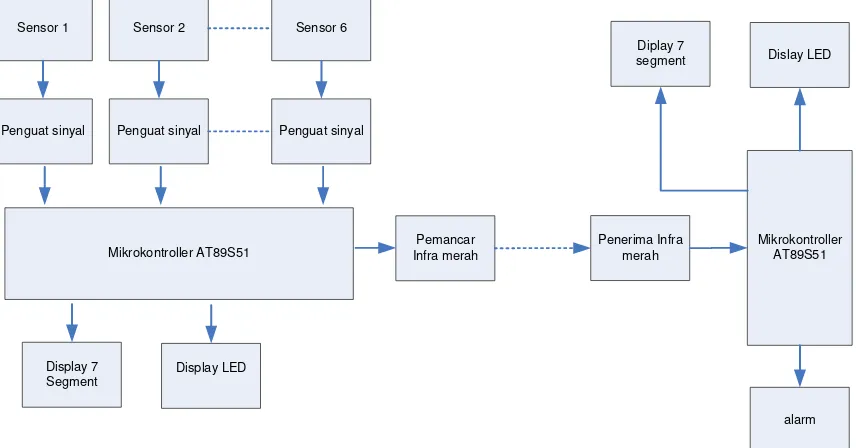
3.1 Diagram Blok dan Rangkaian Sensor Ketinggian Air
Sensor 1 Sensor 2 Sensor 6
Penguat sinyal Penguat sinyal Penguat sinyal
Mikrokontroller AT89S51
Sensor berfungsi untuk mendeteksi ketingian air. Sensor air terdiri dari dua
kabel yang berdampingan. Sensor yang digunakan untuk mendeteksi air pada alat ini
sebanyak 6 buah sensor. Sinyal yang di deteksi oleh sensor kemudian akan dikuatkan
oleh penguat sinyal. Data yang telah dikuatkan oleh penguat sinyal kemudia masuk ke
mikrokontroler AT89S51untuk diolah dan ditampilkan pada display. Display led
berfungsi untuk menampilkan ketinggian air sedangkan display seven segment
17
mikrokontroler kemudian akan dikirimkan ke mikrokontroller kedua melalui
pemancar inframerah. Agar mikroontroler kedua dapat menerima data, digunakan
penerima infra merah yang menggunakan ic TSOP1738. Hasil penerimaan data
kemudian akan ditampilkan pada display.
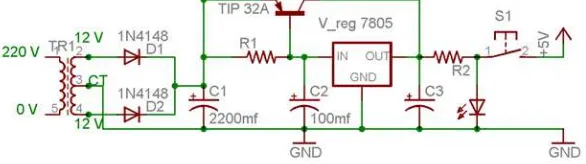
3.2 Rangkaian power supplay ( PSA )
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada.
Rangkaian PSA yang dibuat untuk menghasilkan tegangan keluaran sebesar 5 volt.
Keluaran 5 volt digunakan untuk mensupplay tegangan ke seluruh rangkaian termasuk
mikrokontroller.Rangkaian power supplay ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.2 Rangkaian Power Supplay (PSA)
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan
tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan
disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan
diratakan oleh kapasitor 2200 μF. Regulator tegangan 5 volt (LM7805CT) digunakan
agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan
masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP
rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika
rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari
keluaran 2 buah dioda penyearah.
3.3 Rangkaian Mikrokontroler AT89S51
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh system yang ada.
Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
Gbr.3.3.Rangkaian mikrokontroller AT89S51
Pin 31 External Access Enable (EA) diset high (H). Ini dilakukan karena
mikrokontroller AT89S51 tidak menggunakan memori eskternal. Pin 18 dan 19
dihubungkan ke XTAL 12 MHz dan capasitor 33 pF. XTAL ini akan mempengaruhi
kecepatan mikrokontroller AT89S51 dalam mengeksekusi setiap perintah dalam
19
tinggi akan me-reset mikrokontroller ini. Pin 32 sampai 39 adalah Port 0 yang
merupakan saluran/bus I/O 8 bit open collector dapat juga digunakan sebagai
multipleks bus alamat rendah dan bus data selama adanya akses ke memori program
eksternal. Pada port 0 ini masing masing pin dihubungkan dengan resistor 4k7 ohm.
Resistor 4k7 ohm yang dihubungkan ke port 0 befungsi sebagai pull up( penaik
tegangan ) agar output dari mikrokontroler dapat mentrigger transistor. Pin 1 sampai
8 adalah port 1. Pin 21 sampai 28 adalah port 2. Dan Pin 10 sampai 17 adalah port 3.
Pin 39 yang merupakan P0.0 dihubungkan dengan sebuah resistor 330 ohm dan
sebuah LED. Ini dilakukan hanya untuk menguji apakah rangkaian minimum
mikrokontroller AT89S51 sudah bekerja atau belum. Dengan memberikan program
sederhana pada mikrokontroller tersebut, dapat diketahui apakah rangkaian minimum
tersebut sudah bekerja dengan baik atau tidak. Jika LED yang terhubung ke Pin 39
sudah bekerja sesuai dengan perintah yang diberikan, maka rangkaian minimum
tersebut telah siap digunakan. Pin 20 merupakan ground dihubungkan dengan ground
pada power supplay. Pin 40 merupakan sumber tegangan positif dihubungkan dengan
+ 5 volt dari power supplay
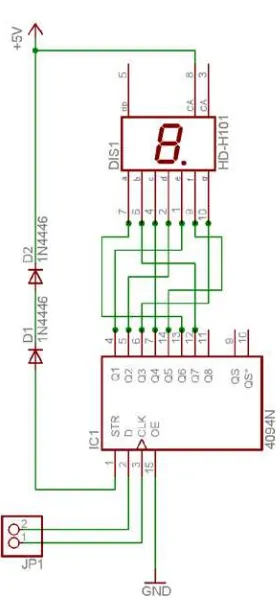
3.4Rangkaian Display Seven Segmen
Nilai ketinggian air yang terdeteksi oleh sensor akan diolah oleh mikrokontroler
AT89S51 untuk selanjutnya ditampilkan pada display seven segmen. Rangkaian
Gambar 3.4 Rangkaian Display Seven Segmen
Display ini menggunakan 1 buah seven segmen yang dihubungkan ke IC 4094
yang merupakan IC serial to paralel. IC ini akan merubah 8 bit data serial yang masuk
menjadi keluaran 8 bit data paralel. Rangkaian ini dihubungkan dengan P3.0 dan P3.1
AT89S51. P3.0 merupakan fasilitas khusus pengiriman data serial yang disediakan
oleh mikrokontroler AT89S51. Sedangkan P3.1 merupakan sinyal clock untuk
pengiriman data serial.
Dengan menghubungkan P3.0 dengan IC serial to paralel (IC 4094), maka
data serial yang dikirim akan diubah menjadi data paralel. Kemudian IC 4094 ini
dihubungkan dengan seven segmen agar data tersebut dapat ditampilkan dalam bentuk
21
jika diberi data low (0) dan segmen akan mati jika diberi data high (1). Untuk
menampilkan angka pada seven segmen, maka data yang harus diberikan adalah
sebagai berikut:
Untuk menampilkan angka nol, data yang harus dikirim adalah 20h
Untuk menampilkan angka satu, data yang harus dikirim adalah 0ech
Untuk menampilkan angka dua, data yang harus dikirim adalah 18h
Untuk menampilkan angka tiga, data yang harus dikirim adalah 88h
Untuk menampilkan angka empat, data yang harus dikirim adalah 0c4h
Untuk menampilkan angka lima, data yang harus dikirim adalah 82h
Untuk menampilkan angka enam, data yang harus dikirim adalah 02h
Untuk tampilan kosong (tidak ada nilai yang tampil), data yang harus dikirim
adalah 0ffh
Program untuk menampilkan angka pada display seven segmen adalah sebagai
clr ti
sjmp Tampil
Program di atas akan menampilkan nilai 1 pada display seven segmen. Dan
nilai berapapun yang diisikan ke alamat 60h, akan ditampilkan pada display seven
segmen.
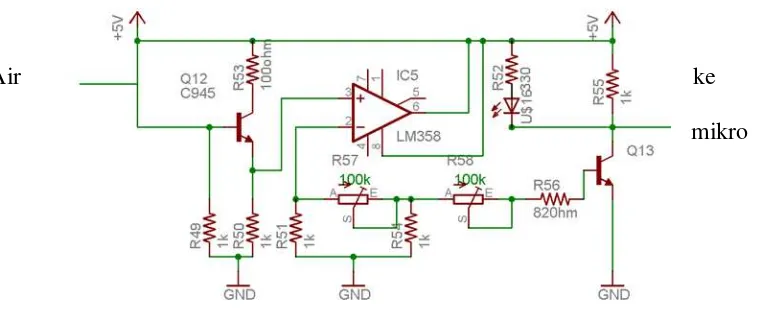
3.5 Perancangan Rangkaian Sensor dan Pengolah Sinyal
Sensor ini berfungsi untuk mengetahui ketika ada air yang mengenai sensor. Sensor
ini terdiri dari dua lempeng logam, dimana lempeng 1 dihubungkan ke Vcc 5 volt dan
yang lainnya dihubungkan ke input dari rangkaian pengolah sinyal.
Sensor dan foto dioda yang terkena air akan mengalami perubahan tegangan
kemudian akan diolah oleh rangkaian penerima agar menghasilkan data biner, dimana
jika sensor terkena air merah maka output dari rangkaian penerima ini akan
mengeluarkan logika low (0), namun jika sensor dan fotodioda tidak terkena air, maka
output dari rangkaian penerima akan mengeluarkan logika high (1). Adapun rangkaian
sensor dan penguat sinyal yang digunakan adalah sebanyak 6 buah yang terbagi dalam
3 level. Berarti dalam setiap level terdapat 2 buah sensor dan penguat sinyal.
Rangkaian sensor dan penguat sinyal seperti gambar berikut :
23
Air ke
mikro
Gambar 3.5 Rangkaian Sensor dan Penguat Sinyal
Pada rangkaian tersebut, output dari sensor diumpankan ke Op Amp, di Op
Amp tegangan akan dikuatkan sesuai dengan yang diinginkan. Output Op Amp akan
diinputkan ke basis dari transistor tipa NPN C945, ini berarti untuk membuat
transistor tersebut aktif maka tegangan yang keluar dari Op Amp harus lebih besar
dari 0,7 volt. Syarat ini akan terpenuhi jika sensor terkena air.
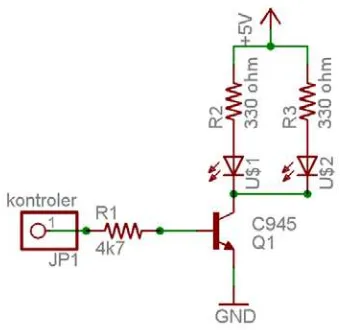
3.6 Display LED
Lampu-lampu led disusun sesuai dengan letak level air. Dimana lampu yang menyala
berarti sensor telah terkena air dan jika sensor belum terkena air, maka LED hidup.
Gambar 3.6. Rangkaian Display LED
Display ini menggunakan transistor sebagai saklar. Transistor yang digunakan
adalah tipe PNP C945. transistor tipe ini akan aktif (saturasi) jika pada basis
mendapatkan tegangan yang lebih kecil dari 4,3 volt (VB < 4,3 volt). Dan akan cut off
(terputus) jika tegangan pada basis lebih besar dari 4,3 volt (VB > 4,3 volt) pada
perancangan alat ini terdapat 6 buah rangkaian di atas. Dimana masing – masing
rangkaian dihubungkan ke mikrokontroler AT89S51
Rangkaian display led ini berfungsi sebagai penunjuk tingkatan ketinggian air.
Apabila ketinggian air dalam kategori rendah maka led berwarna biru akan menyala,
jika tingkatan dalam keadaan sedang maka led berwarna kuning akan menyala dan
apabila telah terjadi banjir maka led berwarna merah yang akan menyala.rangkaian
display led dapat dilihat dari gambar berikut:
Komponen utama dari rangkaian ini adalah 2 buah LED yang hidup/matinya
25
saklar untuk menghidup/mematikan 2buah LED yang disusun secara paralel. Jadi
ketika transistor aktip maka LED akan menyala dan sebaliknya.
Basis dari transistor ini dihubungkan ke mikrokontroler, sehingga dengan
memberikan logika high atau low pada program, maka hidup/matinya LED dapat
dikendalikan melalui program yang diisikan ke mikrokontroler AT89S51. pada tugas
akhir ini digunakan sebanyak enam buah rangkaian seperti tampak pada gambar di
atas
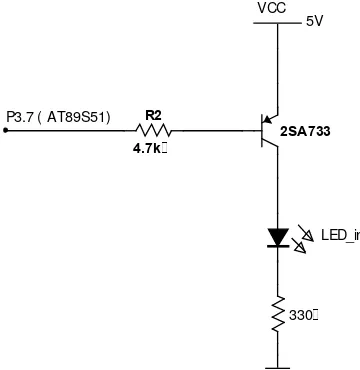
3.7Rangkaian Pengirim Infra Merah
Data yang yang telah diolah mikrokontroler AT89S51 dikirimkan ke rangkaian
penerima dengan menggunakan LED infra merah. Rangkaiannya seperti gambar
berikut :
Gambar 3.7. Rangkaian Pengirim Data Melalui Infra Merah
Pada rangkaian di atas LED infra merah akan menyala jika basis pada
transistor C945 diberi tegangan yang lebih besar dari 0,7 volt, ini akan sama artinya P3.7 ( AT89S51)
LED_ir 5V VCC
330 R2
4.7k
jika pada P3.7 AT89S51 diberi logika high (1), karena pin yang diberi logika high
akan mempunyai tegangan 4 s/d 5 volt, cukup untuk mengaktipkan transistor.
Sedangkan untuk mematikan LED infra merah, maka P3.7 AT89S51 harus diberi
logika low (0), karena dengan memberikan logika low pada P3.7, maka P3.7 akan
memiliki tegangan 0 s/d 0,009 volt, tegangan ini akan menyebabkan transistor tidak
aktip.
Untuk pengiriman data agar data dapat dikirimkan dari jarak yang jauh, maka
LED infra merah harus dipancarkan dengan frekuensi 38 KHz karena frekuensi ini
bebas dari gangguan frekuensi infra merah alam. Jika LED infra merah dipancarkan
dengan frekuensi selai 38 KHz, maka pancarannya akan terganggu oleh
frekuensi-frekuensi infra merah dari alam, seperti frekuensi-frekuensi infra merah yang dipancarkan oleh
matahari, tumbuhan, bahkan badan manusia. Dengan menggunakan frekuensi 38 KHz,
maka pancaran LED infra merah yang dihasilkan oleh rangkaian tidak terganggu oleh
pancaran infra merah alam, sehingga jarak pengiriman data semakin jauh.
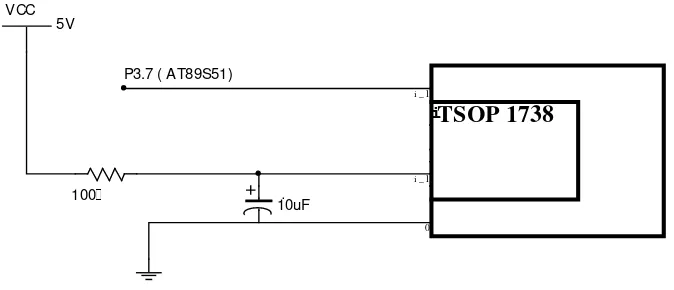
3.8Rangkaian Penerima Infra Merah
IC yang digunakan sebagai penerima infra merah adalah IC TSOP 1738. IC ini sering
digunakan sebagai penerima/receiver remote control dari TV atau VCD.
Rangkaiannya tampak seperti dibawah ini:
27
Gambar 3.8 Rangkaian Penerima Infra Merah
Pada rangkaian diatas digunakan resistor 100 ohm untuk membatasi arus yang
masuk pada rangkaian, sedangkan kapasitor 10 μF digunakan agar arus yang masuk ke
IC TSOP 1738 lebih stabil.
IC ini mempunyai karakteristik yaitu akan mengeluarkan logika high (1) atau
tegangan ± 4,5 volt pada outputnya jika IC ini mendapatkan pancaran sinar infra
merah dengan frekuensi antara 38 – 40 KHz, dan IC ini akan megeluarkan sinyal low
(0) atau tegangan ± 0,109 volt jika pancaran sinar infra merah dengan frekuensi antara
38 – 40 KHz berhenti, namun logika low tersebut hanya sesaat yaitu sekitar 1200 μs,
setelah itu outputnya kan kembali menjadi high. Sifat inilah yang dimanfaatkan
sebagai pengiriman data.
Output dari IC ini dihubungkan ke P3.7 pada mikrokontroller, sehingga setiap
kali IC ini mengeluarkan logika low atau high pada outputnya, maka mikrokontroller
3.9Perancangan Rangkaian Alarm
Rangkaian alarm ini berfungsi untuk memberikan peringatan berupa nada alarm
apabila banjir telah terdeteksi. Apabila seluruh sensor dan fotodioda terkena oleh air
maka alarm akan berbunyi.s Rangkaiannya seperti gambar di bawah ini:
Gambar 3.9. Rangkaian Alarm
Pada alat ini, alarm yang digunakan adalah alarm 5 volt. Alarm ini akan
berbunyi jika positifnya dihubungkan ke sumber tegangan positif dan negatifnya
dihubungkan ke ground.
Pada rangkaian di atas transistor berfungsi sebagai saklar elektronik yang
dapat menghidupkan dan mematikan alarm. Dari gambar dapat dilihat bahwa negatif
alarm dihubungkan ke kolektor dari transistor NPN (2SC945), ini berarti jika
transistor dalam keadaan aktif maka kolektor akan terhubung ke emitor dimana emitor
langsung terhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0
volt, keadaan ini akan mengakibatkan alarm berbunyi. Sebaliknya jika transistor tidak
aktif, maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor
29
Transistor yang digunakan dalam rangkaian di atas adalah transistor jenis
NPN, transistor jenis ini akan aktif apabila tegangan pada basis lebih besar dari 0,7
volt. Resistor 4,7 Kohm pada basis berguna untuk membatasi arus yang masuk pada
BAB 4
PENGUJIAN DAN ANALISA SISTEM
4.1 Pengujian Rangkaian Power Supply (PSA)
Rangkaian Power Supply diuji dengan menghubungkan rangkaian Power Supply
dengan sebuah multimeter. Adapun tujuannya adalah untuk mengukur tegangan
keluarannya apakah sudah sesuai dengan yang diinginkan atau belum.
Pada rangkaian Power Supply tegangan yang masuk adalah tegangan sebesar
220 volt AC. Untuk menghidupkan rangkaian ini tidak diperlukan tegangan sebesar
itu. Selain itu arus yang digunakan adalah arus searah, hal ini disebabkan karena
apabila arus yang masuk adalah arus bolak-balik maka tegangan yang dihasilkan tidak
stabil. Dan ini dapat menyebabkan kerusakan pada rangkaian.
Karena tegangan yang masuk kedalam rangkaian adalah tegangan sebesar 220
Volt AC, maka tegangan ini perlu dikecilkan dan disearahkan menjadi tegangan DC.
Oleh karena itu pada rangkaian ini digunakan Trafo CT yang berfungsi untuk
menurunkan tegangan dari 220 Volt menjadi 2 tegangan keluaran yaitu 12 Volt dan 5
Volt. Kemudian tegangan ini disearahkan dengan 2 buah dioda dan kemudian
diratakan dengan kapasitor 2200 mikro farad.
Tegangan keluaran yang dihasilkan oleh rangkaian Power Supply ini adalah 12
31
rangkaian mikrokontroller AT89S51 dan tegangan 12 Volt DC akan digunakan untuk
menghidupkan semua relay yang ada pada rangkaian.
Apabila rangkaian kita hidupkan dan kita hubungkan ke multimeter dan
keluarannya sesuai dengan yang diharapkan, maka rangkaian ini sudah bekerja dengan
baik. Akan tetapi, bila tidak sesuai maka kemungkinan besar ada kerusakan di dalam
rangkaian ini.
4.2 Pengujian Rangkaian Mikrokontroller AT89S51
Pada rangkaian ini digunakan 2 buah mikrokontoller yaitu pada rangkaian pengirim
data dan pada rangkaian penerima data. Untuk mengetahui apakah rangkaian
mikrokontroller AT89S51 telah bekerja dengan baik, maka dilakukan
pengujian.Pengujian bagian ini dilakukan dengan memberikan program sederhana
pada mikrokontroller AT89S51. Programnya adalah sebagai berikut:
Loop:
Setb P0.0
Acall tunda
Clr P0.0
Acall tunda
Sjmp Loop
Tunda:
Mov r7,#255
Tnd: Mov r6,#255
Djnz r6,$
Djnz r7,tnd
Program di atas bertujuan untuk menghidupkan LED yang terhubung ke P0.0
selama ± 0,13 detik kemudian mematikannya selama ± 0,13 detik secara terus
menerus. Perintah Setb P0.0 akan menjadikan P0.0 berlogika high yang menyebabkan
LED menyala. Acall tunda akan menyebabkan LED ini hidup selama beberapa saat.
Perintah Clr P0.0 akan menjadikan P0.0 berlogika low yang menyebabkan LED akan
mati. Perintah Acall tunda akan menyebabkan LED ini mati selama beberapa saat.
Perintah Sjmp Loop akan menjadikan program tersebut berulang, sehingga akan
tampak LED tersebut tampak berkedip.
Lamanya waktu tunda dapat dihitung dengan perhitungan sebagai berikut :
Kristal yang digunakan adalah kristal 12 MHz dan terdapat 12 siklus mesin di dalam
mikrokontroller, sehingga 1 siklus mesin membutuhkan waktu = 12 1 12MHz =
mikrodetik
Tabel 4.1 Waktu Eksekusi
Mnemonic Siklus Waktu Eksekusi
MOV Rn,#data 2 2 x 1 μd = 2 μd
DJNZ 2 2 x 1 μd = 2 μd
33
Jika program tersebut diisikan ke mikrokontroller AT89S51, kemudian
mikrokontroller dapat berjalan sesuai dengan program yang diisikan, maka rangkaian
minimum mikrokontroller AT89S51 telah bekerja dengan baik.
.
4.3 Pengujian Rangkaian Display Seven Segment
Pengujian pada rangkaian ini dapat dilakukan dengan menghubungkan rangkaian ini
dengan rangkaian mikrokontroler, kemudian memberikan data tertentu pada port serial
dari mikrokontroler. Seven segmen yang digunakan adalah common anoda, dimana
segmen akan menyala jika diberi logika 0 dan sebaliknya segmen akan mati jika diberi
logika 1.
Dari hasil pengujian diperoleh data yang harus dikirimkan ke port serial untuk
menampilkan angka desimal adalah sebagai berikut
Tabel 4.2 Data yang Dikirim ke Port Serial
Angka Data yang dikirim
1 0ECH
2 18H
3 88H
4 0C4H
5 82H
6 02H
7 0E8H
8 0h
9 80H
Program yang diisikan pada mikrokontroler untuk menampilkan nilai-nilai
Program di atas akan menampilkan angka 0 pada semua seven segmen.
Sedangkan untuk menampilkan 3 digit angka yang berbeda pada seven segmen adalah
dengan mengirimkan ke 3 data angka yang akan ditampilkan pada seven segmen.
Programnya adalah sebagai berikut :
Loop:
mov sbuf,#bil1
Jnb ti,$
Clr ti
sjmp loop
35
4.4Pengujian Rangkaian Pengirim Data Melalui Infra Merah
Untuk mengetahui apakah rangkaian pengirim data inframerah sudah bekerja dengan
baik juga diperlukan suatu pengujian rangkaian. Seperti yang sudah dilakukan penulis
pada prakteknya bahwa pemancar inframerah tidak bekerja sesuai dengan yang
diinginkan. Data yang disampaikan oleh pemancar inframerah tidak sama dengan data
yang diterima oleh penerima inframerah.
Setelah dilakukan analisa, ternyata pemancar inframerah tidak dapat bekerja
dengan baik karena adanya gangguan dari inframerah yang dipancarkan oleh alam
baik matahari, tumbuhan bahkan tubuh manusia sendiri. Untuk membuktikan
kebenaran dari analisa ini, maka pengujian rangkaian dilakukan pada malam hari
dimana tidak ada inframerah yang dipancarkan dari alam. Dan ternyata hasilnya
pemancar inframerah dapat mengirimkan data sampai pada jarak maksimum tersebut.
Agar data dapat dikirimkan sampai jarak maksimum tersebut maka LED infra
merah harus dipancarkan dengan frekuensi 38 KHz karena frekuensi ini bebas dari
gangguan frekuensi infra merah alam. Jika LED infra merah dipancarkan dengan
frekuensi selai 38 KHz, maka pancarannya akan terganggu oleh frekuensi-frekuensi
infra merah dari alam, seperti frekuensi infra merah yang dipancarkan oleh matahari,
tumbuhan, bahkan badan manusia. Dengan menggunakan frekuensi 38 KHz, maka
pancaran LED infra merah yang dihasilkan oleh rangkaian tidak terganggu oleh
pancaran infra merah alam, sehingga jarak pengiriman data semakin jauh.
Untuk memancarkan frekuensi 38 KHz dari LED infra merah, langkah yang
dengan frekuensi tersebut, yaitu dengan memberikan logika high dan low pada P3.7
dengan selang waktu (perioda) :
1 1 13 0, 0000263 26,3
38 38 10
T s s
f KHz x Hz µ
= = = = =
Untuk mendapatkan perioda tersebut, maka program yang harus diberikan pada
37
Mikrokontroler AT89S51 memerlukan 12 Clock setiap satu siklus mesin.
Dengan demikian, jika digunakan kristal 12 MHz, maka waktu yang diperlukan untuk
satu siklus mesin adalah :
6
Jika dihitung lamanya mikrokontroler AT89S51 mengerjakan perintah di atas :
Tabel 4.3 Siklus Mesin
Instruksi Siklus mesin Waktu (μS)
CLR
Berdasarkan tabel di atas, maka lamanya logika low (0) pada P3.7 adalah 13 μ dan
lamanya logika high (1) adalah 13 μs, sehingga periodanya menjadi 26 μs.
13 μs 13 μs
Low High
26 μs
6
Jika LED infra merah dipancarkan dengan frekuensi ini, maka pancaran LED
infra merah dari rangkaian tidak akan terganggu oleh frekuensi infra merah alam.
Sebagai catatan frekuensi infra merah yang tidak dipengaruhi oleh frekuensi infra
merah dari alam adalah anatara 38 KHz s/d 40 KHz, frekuensi inilah yang digunakan
sebagai frekuensi remote kontrol dari TV, VCD dan DVD di seluruh dunia.
Ketika penerima infra merah menerima pancaran infra merah dengan frekuensi
38 KHz dari rangkaian pemancar, maka output dari penerima akan berlogika high (1),
jika pancaran infra merah ini dihentikan, maka penerima akan mendapatkan logika
low (0) sesaat (± 1200 μs ) kemudian berubah menjadi high (1) kembali walaupun
tidak ada pancaran infra merah dengan frekuensi 38 KHz. Ini sudah merupakan
karakteristik dari penerima infra merah yang digunakan (TSOP 1738). Pada alat ini,
logika high setelah setelah logika low sesaat itulah yang dijadikan sebagai data,
sehingga dengan mengatur lebar pulsa high (1) tersebut dengan suatu nilai tertentu dan
menjadikan nilai tersebut sebagai datanya, maka pengiriman data dapat dilakukan.
Kesalahan pengambilan data oleh penerima disebabkan karena adanya
penghalang atau karena kesalahan pengambilan data ketika alat pertama kali
dihidupkan. Seharusnya penerima mengambil sinyal low dari data yang pertama,
kemudian mengambil data pertama, setelah itu mengambil sinyal low dari data kedua,
kemudian mengambil data kedua, dan demikian seterusnya, sehingga data tersebut
sesuai dengan urutannya. Namun jika ada penghalang sesaat atau ketika pertama kali
39
seterusnya akan salah. Misalnya jika ada penghalang sesaat, sehingga sinyal low yang
diterima adalah sinyal low yang kedua, maka data kedua akan dianggap sebagai data
pertama, dan data ketiga akan dianggap sebagai data kedua, demikian seterusnya,
sehingga urutan data menjadi salah.
Untuk menghindari kesalahan dalam pengambilan data, maka pada alat ini
ditambahkan satu data yang berfungsi sebagai startbit atau data awal. Data awal ini
mempunyai nilai tertentu, jadi ketika penerima mendapatkan sinyal low, penerima
akan mengambil 1 data setelah sinyal low tersebut dan membandingkannya apakah
sesuai dengan data awal atau tidak. Jika tidak sama, maka penerima akan mengambil
data berikutnya , kemudian membandingkan lagi sesuai atau tidak dengan data awal.
Langkah ini dilakukan terus sampai didapat data awal. Ketika penerima mendapatkan
data yang sesuai dengan data awal, maka penerima akan mengambil data pertama
setelah data awal sebagai data pertama, data kedua setelah data awal sebagai data
kedua, dan seterusnya hingga data ketiga. Dengan demikian tidak akan terjadi
kesalahan urutan data, walaupun ada penghalang sesaat.
Setiap data mempunyai lebar pulsa high (1) tertentu. Untuk nilai data 0, maka
lebar pulsa high yang dikirim adalah ± 1131 μ sekon. Programnya seperti berikut:
Mov 70h,#0
Inc 70h
Kirim:
Mov r0,70h
Acall data
Sjmp kirim
data:
Demikian juga seterusnya jika yang dikirimkan data 1 s/d data 9, maka data ini akan
ditambah dengan nilai 1, dan kemudian hasil penjumlahannya digunakan sebagai
banyaknya perulangan dalam pengiriman pulsa.
Sebagai contoh jika data yang dikirimkan adalah data 1, maka data ini akan
ditambahkan 1 sehingga hasilnya menjadi 2. 2 inilah yang merupakan banyaknya
perulangan pengiriman pulsa. Jadi lebar pulsa untuk data satu ± 2 x 1.131 μs = 2.262
μs. Demikian pula untuk data-data yang lainnya.
4.5Pengujian Rangkaian Penerima Infra Merah
Untuk mengetahui apakah rangkaian penerima inframerah sudah bekerja dengan baik,
41
dipakai adalah IC TSOP 1738. Output dari IC ini dihubungkan ke P3.7 pada
mikrokontroler, sehingga setiap kali IC ini mengeluarkan logika low atau hing pada
outputnya, maka mikrokontroller dapat langsung mendeteksinya. Programnya sebagai
berikut :
Awalnya mikrokontroler akan memasukkan nilai 0 pada alamat 60h, kemudian
menunggu sinyal low dari P3.7 yang terhubung ke output dari IC TSOP 1738. Jika ada
sinyal low, itu berarti ada data yang akan dikirim oleh pemancar, kemudian
mikrokontroler akan mengabaikan sinyal low tersebut sampai datang sinyal high,
sinyal high inilah yang dihitung oleh mikrokontroller sebagai data yang masuk. Data
yang masuk akan dibagikan dengan nilai 10. Hal ini dilakukan karena lebar data
pengirim 10 kali lebih besar daripada lebar data penerima, sehingga harus dibagi
pengiriman, setiap data telah ditambah dengan nilai satu. Selanjutnya lebar data akan
dibandingkan, apakah sama dengan 10 atau tidak, jika sama dengan 10 maka data ini
merupakan data startbit, dengan demikian 3 data setelah ini adalah merupakan data
temperatur, dan akan diambil untuk ditampilkan nilainya. Namun jika data tersebut
tidak sama dengan 10, maka data ini bukan merupakan data startbit, program akan
kembali ke awal sampai mendapatkan startbit.
Setelah mendapatkan data startbit, maka mikrokontroler akan mengambil 3
data setelah data startbit tersebut, yang merupakan data dari nilai yang dikirimkan
oleh pemancar.
4.6. Pengujian Rangkaian alarm
Pengujian pada rangkaian alarm ini dapat dilakukan dengan memberikan tegangan 5
volt dan 0 volt pada basis transistor C945. Transistor C945 merupakan transistor jenis
NPN, transistor jenis ini akan aktip jika pada basis diberi tegangan > 0,7 volt dan tidak
aktip jika pada basis diberi tegangan < 0,7 volt. Aktifnya transistor akan
membunyikan alarm.
Selanjutnya alarm dihubungkan dengan mikrokontroler dan mikrokontroler
diberi program sederhana untuk megaktifkan alarm. Program yang diisikan ke
mikrokontroler untuk mengaktifkan alarm adalah :
Setb P0.0
43
Perintah tersebut akan memberikan logika high (1) atau tegangan 5 volt. pada P0.0,
sehingga dengan demikian alarm akan berbunyi.
4.7 Pengujian rangkaian display led
Pengujian pada rangkaian ini dapat dilakukan dengan memberikan tegangan 5 volt
pada basis, jika pada saat diberikan tegangan 5 volt kemudian LED menyala, dan
ketika diberikan tegangan 0 volt pada basis kemudian LED mati, maka rangkaian ini
telah berfungsi dengan baik.
4.8 Pengujian Rangkaian penguat Sinyal
Pengujian pada rangkaian penguat sinyal ini dilakukan dengan menghubungkan
rangkaian sensor dengan rangkaian penguat sinyal. Selanjutnya rangkaian penguat
sinyal ini dihubungkan dengan sebuah multimeter.
Kemudian langkah selanjutnya adalah dengan menghidupkan rangkaian, lalu
sensor misalnya sensor level 1 dibuat menyentuh air sehingga sensor menghasilkan
tegangan, tegangan yang dihasilkan oleh sensor ini kita ukur juga dengan
menggunakan multimeter. Setelah itu, sensor akan mengirimkan data ini ke penguat
sinyal yang telah kita hubungkan dengan multimeter. Apabila tegangan yang
dihasilkan oleh penguat sinyal lebih besar dari tegangan yang dihasilkan oleh sensor,
4.9 Prinsip Kerja Pendeteksi Banjir Komunikasi Wireless
Pendeteksi banjir ini memanfaatkan ketinggian air untuk mengetahui keadaan suatu
lokasi apakah ada tanda-tanda banjir akan datang atau tidak. Untuk mengetahui
ketinggian air digunakan sensor pendeteksi ketinggian air. Sensor ini dibuat dari 2
buah kabel yang berdampingan. Pada rangkaian ini digunakan 6 buah sensor
pendeteksi ketinggian air yang dibagi menjadi 3 level. Dengan kata lain, pada setiap
level terdapat 2 buah sensor pendeteksi ketinggian air. Adapun level pada sensor ini
adalah siaga, waspada dan awas.
Karena pada proyek ini yang dimanfaatkan adalah ketinggian air, maka berapa
ketinggian air ditampilkan dalam 3 bentuk display, yaitu display seven segment, LED
dan alarm. Display seven segment berfungsi untuk menunjukkan ketinggian air dalam
bentuk angka yang ditampilkan secara digit, display LED berfungsi untuk
menampilkan ketinggian air dalam bentuk 3 level ketinggian air, dan alarm berfungsi
untuk memberitahukan bahwa air sudah berada pada ketinggian maksimal.
Apabila air menyentuh sensor maka akan timbul tegangan karena korslet atau
hubungan arus singkat. Tegangan yang dihasilkan oleh sensor ini akan dikirim ke
penguat sinyal. Karena kita ketahui, tegangan yang dihasilkan oleh sensor sangat
kecil, maka tegangan yang dihasilkan oleh sensor akan dikuatkan oleh penguat sinyal.
Hal ini dilakukan agar mikrokontroller mampu membaca tegangan yang dihasilkan
oleh sensor tersebut.
Setelah itu, mikrokontroller akan membaca tegangan yang dihasilkan oleh
45
seven segment dan LED serta pemancar inframerah. Adapun program dari
mikrokontroller ini dapat kita lihat pada lampiran Tugas Akhir ini. Apabila air
menyentuh sensor level 1 maka LED biru akan menyala, begitu juga selanjutnya.
Apabila air menyentuh sensor level 2 maka LED kuning akan menyala, jika air
menyentuh sensor level 3 maka LED merah akan menyala. Display seven segment
akan menampilkan berapa ketinggian air pada setiap level yang disentuh oleh air.
Semua data yang ditampilkan oleh display LED dan seven segment akan
dikirimkan ke penerima inframerah. Pengiriman data ini dilakukan oleh pemancar
inframerah. Data yang diterima oleh pemancar akan dikirim ke mikrokontroller yang
ada pada penerima. Kemudian mikrokontroller akan mengolah data ini dan
menampilkannya sesuai dengan data yang ada pada pemancar inframerah. Pada
rangkaian penerima inframerah ini terdapat alarm. Apabila air menyentuh sensor level
3 maka alarm akan berbunyi yang menandakan bahwa air sudah berada pada
ketinggian maksimal.
4.10 Aplikasi Pendeteksi Banjir Pada Kolam Ikan Lele
Pendeteksi banjir komunikasi wireless ini umumnya diaplikasikan di sungai
terutama sungai – sungai besar yang apabila airnya meluap dapat mengakibatkan
banjir di daerah pemukiman penduduk di sekitarnya. Atau di sungai yang
dipinggirannya terdapat tambak atau kolam ikan air tawar. Jarak antara pemancar dan
pemancar inframerah yang biasa maka kemungkinan tidak bias mencapai jarak
tersebut karena banyaknya gangguan inframerah dari alam.
Berikut kita akan membahas mengenai aplikasi pendeteksi banjir pada kolam
ikan lele. Ikan lele merupakan salah satu jenis ikan air tawar yang sudah
dibudidayakan secara komersial oleh masyarakat Indonesia terutama di Pulau Jawa.
Budidaya ikan lele berkembang pesat karena :
1. Dapat dibudidayakan di lahan dan sumber air yang terbatas
2. Teknologi budidaya relatif mudah dikuasai oleh masyrakat
3. Pemasarannya relatif mudah
4. Modal usaha yang dibutuhkan relatif rendah
Budidaya ikan lele dapat dilakukan di kolam tanah, bak tambak atau bak
plastik. Sumber air dapat menggunakan aliran irigasi, air sumur atau air hujan. Karena
mudahnya memelihara atau membudidayakan ikan lele, maka banyak masyarakat
membuat kolam – kolam kecil di lahan kosong di sekitar rumahnya. Pengairan yang
biasa dilakukan adalah dengan memanfaatkan air hujan.
Berikut merupakan syarat hidup ikan lele di air kolam :
1. Tanah yang baik adalah tanah liat, berlumut dan subur
2. Lahan ideal untuk budidaya adalah sawah, comberan, dan kolam-kolam
pekarangan
3. Perairan tidak boleh tercemar bahan kimia
4. Lokasi kolam harus berhubungan langsung denganm sumber air misalnya
sungai
47
6. Air kolam jangan terlalu penuh karena lele lebih bagus hidup di daerah
berlumpur.
Karena kita ketahui ikan lele tidak dapat hidup di daerah yang terlalu banyak
airnya. Untuk itu, dibutuhkan suatu alat untuk mendeteksi ketinggian air pada kolam
ikan lele. Apalagi pada saat musim hujan, curah hujan yang sangat tinggi dapat
menyebabkan banjir pada kolam. Tentu hal ini sangat merugikan pemilik kolam
tersebut, karena ikan – ikan lele pada kolam tersebut dapat hanyut terbawa arus air
yang meluap dari kolam.
Dengan adanya pendeteksi banjir ini, maka pemilik kolam ikan dapat
mendeteksi secara otomatis berapa ketinggian air kolam tersebut. Sehingga pemilik
BAB 5
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Berdasarkan hasil dari proyek Pendeteksi Banjir Komunikasi Wireless, penulis dapat
menarik kesimpulan sebagai berikut:
1. Sensor Pendeteksi Banjir Komunikasi Wireless berbasis AT89S51 merupakan
suatu alat yang dapat dipakai untuk mendeteksi banjir, dimana keadaan banjir
dapat dideteksi dengan mengukur ketinggian air.
2. Untuk mengukur ketinggian air digunakan sensor pendeteksi ketinggian air
yang dapat mendeteksi setiap perubahan ketinggian air.
3. Sensor pendeteksi banjir dibagi menjadi 3 level yaitu level siaga, waspada dan
awas yang ditampilkan dalam 3 display yaitu display Seven Segment, LED
dan alarm. Alarm akan berbunyi apabila air sudah mencapai ketinggian
maksimal.
4. Pendeteksi banjir ini menggunakan komunikasi wireless yaitu komunikasi
49
5.2. Saran
Pada alat ini digunakan rangkaian pemancar inframerah. Pada siang hari pemancar ini
tidak dapat bekerja dengan baik karena mendapat gangguan dari inframerah alam.
Oleh karena itu, agar proyek ini lebih sempurna sebaiknya inframerah yang digunakan
diganti dengan inframerah yang kualitasnya lebih baik. Atau untuk mengurangi biaya
proyek ini sebaiknya penerima inframerah diatur frekuensinya sehingga frekuensi
inframerah yang digunakan tidak bersinggungan dengan inframerah yang dipancarkan
oleh alam sekitar kita atau bahkan tubuh kita sendiri.
Sensor pendeteksi banjir komunikasi wireless berbasis AT89S51 merupakan
suatu alat yang dapat digunakan untuk mendeteksi banjir. Oleh karena itu disarankan
agar proyek ini tidak hanya semata digunakan oleh mahasiswa sebagai syarat untuk
meraih gelar diploma pada program studi Fisika Instrumentasi, tetapi proyek ini
harusnya dapat lebih dikembangkan agar proyek ini lebih sempurna sehingga proyek
ini dapat diaplikasikan ke fungsi yang sesungguhnya yaitu sebagai pendeteksi banjir
pada suatu lingkungan, sehingga mampu membantu masyarakat untuk mengetahui
keadaan pemukimannya apakah bebas dari banjir atau ada tanda-tanda kemungkinan
DAFTAR PUSTAKA
Afgianto. 2004. “ Belajar Mikrokontroler AT89C51/52/55 Teori dan Aplikasi “. Edisi
Kedua. Yogyakarta: Gava Media.
Ibrahim, KF. 1996. “ Teknik Digital “. Edisi Pertama. Yogyakarta: ANDI
Lukito, Ediman. 1991. “ Pemrograman Dengan Menggunakan Bahasa Assembly “.
Jakarta: PT. Elex Media Komputindo-Gramedia.
Samuel, H dan Tirtamihardja. 1996. “ Elektronika Digital “. Cetakan 1. Yogyakarta:
ANDI
Sudjadi. 2005. “ Teori dan Aplikasi Mikrokontroler AT89C51 “. Cetakan 1.
Yogyakarta : Graha Ilmu
;Situs mikrokontoller umum
GAMBAR PENDETEKSI BANJIR KOMUNIKASI WIRELESS PADA KOLAM PEMBUDIDAYAAN IKAN LELE
GAMBAR KOLAM PEMBUDIDAYAAN IKAN LELE
GAMBAR PENDETEKSI BANJIR KOMUNIKASI WIRELESS
GAMBAR RANGKAIAN SENSOR KETINGGIAN AIR, PEMANCAR INFRAMERAH DAN RANGKAIAN PENERIMA INFRAMERAH PADA KOLAM BUDIDAYA IKAN
LELE