PENGGUNAAN PHOTO DIODA DAN INFRA RED PADA
PERANCANGAN LIFT UNTUK 3 LANTAI BERBASIS
MIKROKONTROLER AT89S51
LAPORAN TUGAS AKHIR
AJI WINATA UTAMA
052408051
PROGRAM STUDI DIPLOMA III FISIKA INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PENGGUNAAN PHOTO DIODA DAN INFRA RED PADA PERANCANGAN LIFT UNTUK 3 LANTAI BERBASIS MIKROKONTROLER AT89S51
LAPORAN TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
AJI WINATA UTAMA
052408051
PROGRAM STUDI DIPLOMA III FISIKA INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PENGGUNAAN PHOTO DIODA DAN INFRA RED
PADA PERANCANGAN LIFT UNTUK 3 LANTAI BERBASIS MIKROKONTROLER AT89S51
Kategori : LAPORAN TUGAS AKHIR
Nama : AJI WINATA UTAMA
Nomor Induk Mahasiswa : 052408051
Program Studi : DIPLOMA III FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM
(FMIPA) UNIVERSITAS SUMATERA UTARA
Disetujui oleh:
Ketua Program Studi, Dosen Pembimbing,
Drs. Syahrul Humaidi. Msc. Drs.Junaidi
PERNYATAAN
PENGGUNAAN PHOTO DIODA DAN INFRA RED PADA PERANCANGAN LIFT UNTUK 3 LANTAI BERBASIS MIKROKONTROLER AT89S51
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Agustus 2008
PENGHARGAAN
Puji dan syukur penulis panjatkan kehadirat Allah SWT karena berkat rahmat dan kurnia-NYA penulis dapat menyelesaikan laporan Tugas Akhir ini. Salawat dan salam kepada Rasulullah Muhammad SAW.
Laporan Tugas Akhir ini yang berjudul PENGGUNAAN PHOTO DIODA DAN INFRA RED PADA PERANCANGAN LIFT UNTUK 3 LANTAI BERBASIS MIKROKONTROLER AT89S51. meskipun dalam peruses penulisan banyak menemui hambatan dan rintangan namun dengan usaha maksimal yang dilakukan penulis serta bantuan dari berbagai pihak, akhirnya laporan Tugas Akhir ini dapat selesai. Atas bantuan dan motivasi yang diberikan, maka penulis mengucapkan banyak terima kasih kepada :Bapak DR.Edi Marlianto, M.Sc selaku Dekan FMIPA USU, Bapak Drs. Syahrul Humaidi M.Sc selaku ketua jurusan Perogram studi Fisika Instrumentasi. Bapak Ir.Junaidi selaku dosen pembimbing, Seluruh Dosen yang telah memberikan ilmu pengetahuan selama perkuliahan, yang membuka cakrawala berfikir serta pegawai tata usaha yang ikut mensukseskan proses belajar mengajar. Terima kasih kepada Ayahanda dan Ibunda yang telah memberikan didikan terbaik bagi penulis Rekan-rekan di Fisika Instrumentasi, Arie Prasetya Wibawa, Riadi, terima kasih atas, kritik dan sarannya terhadap laporan Tugas Akhir ini. Putri Rahmadhania Sari yang terus memberikan penulis motivasi dan semangat. Dan kepada Bryan Habsyah terima kasih atas bantuanya dan dukungannya., Penulis menyadari bahwa dalam penyusunan laporan Tugas Akhir ini masih terdapat kekurangan dan masih jauh dari kesempurnaan. Oleh karena itu penulis sangat terbuka terhadap saran maupun kritikan dalam sebuah diskusi yang membangun dari pembaca
ABSTRAK
Pada gedung gedung besar yang memiliki lebih dari satu lantai diperlukan tangga yang dapat menghubungkan satu lantai ke lantai lainnya. Namun dengan menggunakan tangga masih kurang efisien. Karena itu dibutuhkan sebuah lift yang dapat menghubungkan sseluruh lantai yang terdapat dalam gedung tersebut.
Untuk mengendalikan sebuah lift diperlukan sebuah motor dan pengontrol system. Dalam penelitian ini motor yang digunakan adalah motor stepper dan sebagai pengontrol system digunakan mikrokontroler AT89S51. Motor stepper berfungsi untuk mengangkat dan menurunkan lift. Sedangkan mikrokontroler berfungsi untuk memberikan data pada motor stepper agar motor stepper dapat bergerak searah dengan jarum jam atau berlawanan arah dengan jarum jam ( mengangkat dan menurunkan lift).
DAFTAR ISI 1.1 Latar Belakang Masalah ... 1
1.2 Rumusan Masalah... 1
1.3 Tujuan Proyek ... 2
1.4 Batasan Masalah ... 2
1.5 Sistematika Penulisan ... 2
BAB II LANDASAN TEORI 2.1 Perangkat Keras... 4
2.1.1 Mikrokontroler AT89S51 ... 4
2.1.2 Kontruksi AT89S51 ... 5
2.1.3 SFR ( Register Fungsi Khusus ) Keluarga 51... 7
2.1.4 Gambar IC Mikrokontroler AT89S51... 11
2.2 Perangkat Lunak ... 13
2.2.1 Instruksi – Instruksi AT89S51 ... 13
2.2.2 Software 8051 Editor, Assembler, Simulator (IDE) ... 17
2.2.3 Software Downloader... 18
2.2.4 Motor Langkah (Stepper) ... 19
2.2.5.2 Karakteristik Ideal Penguat Operasional ... 23
2.2.5.3 Penguat Non Inverting ... 27
2.2.5.4 Penguat Inverting ... 28
2.2.5.5 Penguat Differensiator... 30
2.2.5.6 Penguat Jumlah (Summing Amplifier) ... 31
2.2.6 Transistor Sebagai Switching ... 32
BAB III RANCANGAN SISTEM 3.1 Diagram Blok ... 34
3.2 Rangkaian Power Supply ( PSA )... 35
3.3 Rangkaian Mikrokontroler AT89S51 ... 36
3.4 Rangkaian Tombol Perintah... 38
3.5 Rangkaian Display Seven Segment ... 39
3.6 Rangkaian Driver Motor Stepper... 40
3.7 Rangkaian Penguat Sinyal... 42
3.8 Diagram Alir Pemrograman ... 44
BAB IV PENGUJIAN ALAT 4.1 Pengujian Rangkaian Power Supply ( PSA ) ... 46
4.2 Pengujian Rangkaian Mikrokontroler AT89S51... 46
4.3 Pengujian Rangkaian Tombol ... 48
4.4 Pengujian Rangkaian Display Seven Segment... 49
4.5 Pengujian Rangkaian Driver Motor Stepper ... 51
4.6 Pengujian Program ... 54
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 57
5.2 Saran ... ... 57
DAFTAR TABEL
DAFTAR GAMBAR
Gambar 2.1 IC Mikrokntroler AT89S51 ... 11
Gambar 2.2 8051 Editor,Assebler,Simulator... 18
Gambar 2.3 ISP-Flash Programmer ... 19
Gambar 2.4 Diagram Motor Langkah ... 20
Gambar 2.5 Pemberian Data/Pulsa Pada Motor Stepper... 21
Gambar 2.6 Rangkaian Dasar Penguat non-inverting ... 27
Gambar 2.7 Rangkaian Dasar Penguat inverting ... 29
Gambar 2.8 Rangkaian Dasar Penguat differensial ... 30
Gambar 2.9 Rangkaian Dasar Penguat Jumlah... 31
Gambar 2.10 Transistor Seagai Switching ... 32
Gambar 3.1 Diagram Blok Rangkaian ... 34
Gambar 3.2 Rangkaian Power Supply ... 35
Gambar 3.3 Rangkaian Mikrokontroller AT9S51 ... 37
Gambar 3.4 Rangkaian Tombol Perintah ... 39
Gambar 3.5 Rangkaian Display Seven Segmen ... 40
Gambar 3.6 Rangkaian Driver Motor Stepper... 41
Gambar 3.7 Rangkaian Penguat Sinyal ... 42
BAB I PENDAHULUAN
1.1. Latar Belakang Masalah
Pada gedung - gedung besar yang memiliki lebih dari satu lantai diperlukan tangga yang dapat menghubungkan satu lantai ke lantai lainnya. Namun dengan menggunakan tangga masih kurang efisien. Karena itu dibutuhkan sebuah lift yang dapat menghubungkan seluruh lantai yang terdapat dalam gedung tersebut.
Untuk merancang sebuah lift diperlukan sebuah sistem kendali. Untuk itu dapat digunakan sebuah komputer untuk mengendalikannya. Namun dengan menggunakan komputer masih kurang efisien. Karena itu komputer dapat digantikan dengan sebuah mikrokontroler.
Mikrokontroler merupakan sebuah IC yang dapat ditulis dan dihapus sampai 1000 kali. Penggunaan mikrokontroler sebagai pengganti dari sebuah komputer untuk mengendalikan suatu sistem sudah sering digunakan. Karena itu penggunaan mikrokontroler akan sangat membantu dalam membuat sebuah sistem kendali. Dalam hal ini adalah mengendalikan sebuah lift.
1.2. Rumusan Masalah
1.3 Tujuan Proyek
1. Sebagai salah satu syarat untuk dapat menyelesaikan program Diploma Tiga (D-III) Fisika Instrumentasi FMIPA Universitas Sumatera Utara.
2. Memanfaatkan mikrokontroler AT89S51 sebagai tempat pemrosesan data (otak) dari sebuah robot
3. Menggantikan sistem komputer dengan sebuah mikrokontroler AT89S51 untuk mengendalikan sebuah lift.
1.4 Batasan Masalah
Tujuan dilakukan penulisan proyek ini adalah sebagai berikut :
1. Pada perancangan ini sistem hanya akan mengendalikan lift untuk 3 lantai. Untuk mengembangkan ke lantai berikutnya harus ada penambahan dan perubahan sistem dan program.
2. Pada perancangan ini akan dibuat miniature dari lift untuk 3 lantai, jadi beban yang dapat diangkat oleh lift masih terbatas.
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip perancangan lift untuk 3 lantai ini.
BAB I. PENDAHULUAN
BAB II. LANDASAN TEORI
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian Teori pendukung itu antara lain tentang resitor, transistor dan IC-IC yang digunakan dalam rangkaian ini.
BAB III. PERANCANGAN ALAT DAN PROGRAM
Pada bagian ini akan dibahas perancangan dari alat, yaitu diagram blok dari rangkaian, skematik dari masing-masing rangkaian
BAB IV. ANALISA RANGKAIAN DAN SISTEM KERJA ALAT
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat, dan juga pemrograman.
BAB V. KESIMPULAN DAN SARAN
BAB 2
LANDASAN TEORI
2.1 Perangkat Keras
2.1.1 Mikrokontroler AT89S51
Mikrokontroler, sebagai suatu terobosan teknologi mikrokontroler dan mikrokomputer, hadir memenuhi kebutuhan pasar (market need) dan teknologi baru. Sebagai teknologi baru, yaitu teknologi semikonduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang kecil serta dapat diproduksi secara massal (dalam jumlah banyak) sehingga harga menjadi lebih murah (dibandingkan mikroprosesor). Sebagai kebetuhan pasar, mikrokontroler hadir untuk memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat bantu dan mainan yang lebih canggih.
Ilustrasi yang mungkin bisa memberikan gambaran yang jelas dalam penggunaan mikrokontroler adalah aplikasi mesin tiket dalam arena permainan yang saat ini terkenal di Indonesia. Jika kita sudah selesai bermain, maka akan diberikan suatu nilai, nilai inilah yang menentukan berapa jumlah tiket yang bisa diperoleh dan jika dikumpulkan dapat ditukar dengan berbagai macam hadiah. Sistem tiket ini ditangani dengan mikrokontroler, karena tidak mungkin menggunakan komputer PC yang harus dipasang di samping (atau di belakang) mesin permainan yang bersangkutan.
pengukuran disuatu tempat yang membahayakan manusia, maka akan lebih nyaman jika dipasang suatu sistem pengukuran yang bisa mengirimkan data lewat pemancar dan diterima oleh stasiun pengamatan dari jarak yang cukup aman dari sumbernya. Sistem pengukuran jarak jauh ini jelas membutuhkan suatu sistem akuisisi data sekaligus sistem pengiriman data secara serial (melalui pemancar), yang semuanya itu bisa diperoleh dari mikrokontroler yang digunakan.
Tidak seperti sistem komputer, yang mampu menangani berbagai macam program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja. Perbedaan lainnya terletak pada perbandingan RAM dan nya. Pada sistem komputer RAM dan ROM-nya besar. Sedangkan pada mikrokontroler ROM dan RAM-ROM-nya terbatas. Pada mikrokontroler AT89S51 ROM atau flash PEROM berukuran 2 kilo byte, sedangkan RAM-nya berukuran 128 byte.
2.1.2 Kontruksi AT89S51
Mikrokontrol AT89S51 hanya memerlukan tambahan 3 kapasitor, 1 resistor dan 1 kristal serta catu daya 5 Volt. Kapasitor 10 mikro-Farad dan resistor 10 Kilo Ohm dipakai untuk membentuk rangkaian reset. Dengan adanya rangkaian reset ini AT89S51 otomatis direset begitu rangkaian menerima catu daya. Kristal dengan frekuensi maksimum 24 MHz dan kapasitor 30 piko-Farad dipakai untuk melengkapi rangkaian
oscilator pembentuk clock yang menentukan kecepatan kerja mikrokontroler.
(ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai dangan keperluannya, dalam susunan MCS-51 memori penyimpanan progam ini dinamakan sebagai memori progam. Random Access Memori (RAM) isinya akan sirna begitu IC kehilangan catu daya, dipakai untuk menyimpan data pada saat progam bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai memori data.
Ada berbagai jenis ROM. Untuk mikrokontroler dengan progam yang sudah baku dan diproduksi secara masal, progam diisikan ke dalam ROM pada saat IC mikrokontroler dicetak di pabrik IC. Untuk keperluan tertentu mikrokontroler mengunakan ROM yang dapat diisi ulang atau Programble-Eraseable ROM yang disingkat menjadi PEROM atau PROM. Dulu banyak dipakai UV-EPROM (Ultra Violet
Eraseable Progamble ROM) yang kemudian dinilai mahal dan ditinggalkan setelah ada
flash PEROM yang harganya jauh lebih murah.
Jenis memori yang dipakai untuk Memori Program AT89S51 adalah Flash PEROM, program untuk mengendalikan mikrokontroler diisikan ke memori itu lewat bantuan alat yang dinamakan sebagai AT89S51 Flash PEROM Programmer.
Memori Data yang disediakan dalam chip AT89S51 sebesar 128 byte, meskipun hanya kecil saja tapi untuk banyak keperluan memori kapasitas itu sudah cukup. Sarana Input/Ouput yang disediakan cukup banyak dan bervariasi. AT89S51 mempunyai 32 jalur Input/Ouput. Jalur Input/Ouput paralel dikenal sebagai Port 1 (P1.0..P1.7) dan Port 3 (P3.0..P3.5 dan P3.7).
sehingga kalau sarana input/ouput yang bekerja menurut fungsi waktu. Clock penggerak untaian pencacah ini bisa berasal dari oscillator kristal atau clock yang diumpan dari luar lewat T0 dan T1. T0 dan T1 berhimpitan dengan P3.4 dan P3.5, sehingga P3.4 dan P3.5 tidak bisa dipakai untuk jalur input/ouput parelel kalau T0 dan T1 dipakai.
AT89S51 mempunyai enam sumber pembangkit interupsi, dua diantaranya adalah sinyal interupsi yang diumpankan ke kaki INT0 dan INT1. Kedua kaki ini berhimpitan dengan P3.2 dan P3.3 sehingga tidak bisa dipakai sebagai jalur input/output parelel kalau INT0 dan INT1 dipakai untuk menerima sinyal interupsi.
Port1 dan 2, UART, Timer 0,Timer 1 dan sarana lainnya merupakan register yang secara fisik merupakan RAM khusus, yang ditempatkan di Special Functoin Regeister (SFR).
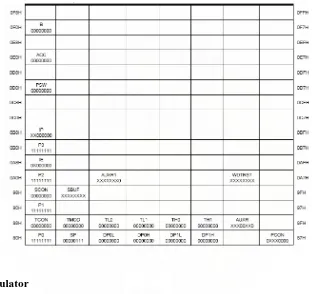
2.1.3 SFR (Register Fungsi Khusus ) Pada Keluarga 51
Sekumpulan SFR atau Special Function Register yang terdapat pada Mikrokontroler Atmel Keluarga 51 ditunjukan pada tabel 2.1, pada bagian sisi kiri dan kanan dituliskan alamat-alamatnya dalam format heksadesimal.
dari bit-bit baru ini akan selalu ‘0’ dan nilai aktifnya adalah ‘1’. Berikut akan dijelaskan secara singkat SFR-SFR beserta fungsinya:
Tabel 2.1. Peta Register Fungsi Khusus – SFR (Special Function Register)
Akumulator
ACC atau akumulator yang menempati lokasi E 0h digunakan sebagai register untuk penyimpanan data sementara, dalam program, instruksi mengacunya sebagai register A (bukan ACC).
Register B
Program Status Word (PSW)
Register PSW (lokasi D 0h) mengandung informasi status program. Stack Pointer
Register SP atau Stack Pointer (lokasi 8 1h) merupakan register dengan panjang 8-bit, digunakan dalam proses simpan menggunakan instruksi PUSH dan CALL. Walau Stack bisa menempati lokasi dimana saja dalam RAM, register SP akan selalu diinisialisasi ke 07h setelah adanya reset, hal ini menyebabkan stack berawal di lokasi 08h.
Data Pointer
Register Data Pointer atau DPTR mengandung DPTR untuk byte tinggi (DPH) dan byte rendah (DPL) yang masing-masing berada dilokasi 83h dan 82h, bersama-sama membentuk register yang mampu menyimpan alamat 16-bit. Dapat dimanipulasi sebagai register 16-bit atau ditulis dari/ke port, untuk masing-masing Port 0,Port 1, Port2 dan Port 3.
Serial Data Buffer
SBUF atau Serial Data Buffer (lokasi 99h) sebenarnya terdiri dari dua register yang terpisah, yaitu register penyangga pengirim (transmit buffer) dan penyangga penerima
(receive buffer). Pada saat data disalin ke SBUF, maka data sesungguhnya dikirim ke
penyangga pengirim dan sekaligus mengawali transmisi data serial. Sedangkan pada saat data disalin dari SBUF, maka sebenarnya data tersebut berasal dari penyangga penerima. Time Register
Capture Register
Pasangan register (RCAP2H, RCAP21) yang menempati lokasi CBh dan CAh merupakan register capture untuk mode Timer 2 capture. Pada mode ini, sebagai tanggapan terjadinya suatu transisi sinyal di kaki (pin) T2EX (pada AT89C52/55), TH2 dan TL2 disalin masing-masing ke RCAP2H dan RCAP2L. Timer 2 juga memiliki mode isi-ulang-otomatis 16-bit dan RCAP2H serta RCAP2L digunakan untuk menyimpan nilai isi-ulang tersebut.
Kontrol Register
Register-register IP, IE, TMOD, TCON, T2CON, T2MOD, SCON dan PCON berisi bit-bit kontrol dan status untuk sistem interupsi, pencacah/pewaktu dan port serial.
Berikut ini merupakan spesifikasi dari IC AT89S51 :
Kompatible dengan produk MCS-51
Empat K byte In-Sistem Reprogammable Flash Memory
Daya tahan 1000 kali baca/tulis
Tegangan kerja 4,0 volt sampai 5,5 volt
Fully Static Operation : 0 Hz sampai 33 MHz
Tiga level kunci memori progam
128 x 8 – bit RAM internal
32 jalur input/output (I/O)
Dua 16 bit Timer/Counter
Enam sumber interupt
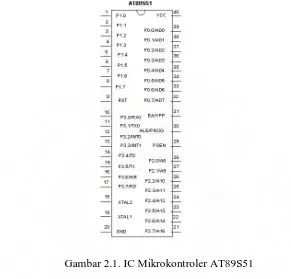
2.1.4 Gambar IC Mikrokontroler AT89S51
Gambar IC mikrokontroler AT89S51 ditunjukkan pada gambar 2.1 di bawah ini:
Gambar 2.1. IC Mikrokontroler AT89S51 Deskripsi pin-pin pada mikrokontroler AT89S51 :
VCC (Pin 40)
Suplai tegangan GND (Pin 20) Ground
Port 0 (Pin 39 – pin 32)
input dengan memberikan logika 1 pada port tersebut. Pada fungsi sebagai low order multiplex address/data, port ini akan mempunyai internal pull up. Pada saat flash progamming diperlukan eksternal pull up, terutama pada saat verifikasi program.
Port 2 (Pin 21 – pin 28)
Port 2 berfungsi sebagai I/O biasa atau high order address, pada saat mengakse memori secara 16 bit. Pada saat mengakses memori 8 bit, port ini akan mengeluarkan isi dari P2
special function register. Port ini mempunyai internal pull up dan berfungsi sebagai
input dengan memberikan logika 1. Sebagai output, port ini dapat memberikan output sink ke keempat buah input TTL.
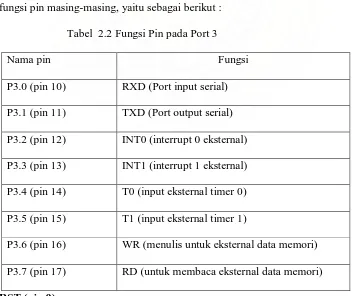
Port 3 (Pin 10 – pin 17)
Port 3 merupakan 8 bit port I/O dua arah dengan internal pull up. Port 3 juga mempunyai fungsi pin masing-masing, yaitu sebagai berikut :
Tabel 2.2 Fungsi Pin pada Port 3
Nama pin Fungsi
P3.0 (pin 10) RXD (Port input serial) P3.1 (pin 11) TXD (Port output serial) P3.2 (pin 12) INT0 (interrupt 0 eksternal) P3.3 (pin 13) INT1 (interrupt 1 eksternal) P3.4 (pin 14) T0 (input eksternal timer 0) P3.5 (pin 15) T1 (input eksternal timer 1)
Reset akan aktif dengan memberikan input high selama 2 cycle. ALE/PROG (pin 30)
Address latch Enable adalah pulsa output untuk me-latch byte bawah dari alamat selama mengakses memori eksternal. Selain itu, sebagai pulsa input progam (PROG) selama memprogram Flash.
PSEN (pin 29)
Program store enable digunakan untuk mengakses memori progam eksternal. EA (pin 31)
Pada kondisi low, pin ini akan berfungsi sebagai EA yaitu mikrokontroler akan menjalankan progam yang ada pada memori eksternal setelah sistem direset. Jika kondisi high, pin ini akan berfungsi untuk menjalankan progam yang ada pada memori internal. Pada saat flash programming, pin ini akan mendapat tegangan 12 Volt.
XTAL1 (pin 19)
Input untuk clock internal. XTAL2 (pin 18)
Output dari osilator.
2.2 Perangkat Lunak
2.2.1 Instruksi – Instruksi AT89S51
1. Instruksi MOV
Perintah ini merupakan perintah untuk mengisikan nilai ke alamat atau register tertentu. Pengisian nilai dapat secara langsung atau tidak langsung.
Contoh pengisian nilai secara langsung
MOV R0,#20h
Perintah di atas berarti : isikan nilai 20 Heksadesimal ke register 0 (R0). Tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah nilai. Contoh pengisian nilai secara tidak langsung
MOV 20h,#80h
...
...
MOV R0,20h
Perintah di atas berarti : isikan nilai yang terdapat pada alamat 20 Heksadesimal ke register 0 (R0).
Tanpa tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah alamat.
2. Instruksi DJNZ
Decreament Jump If Not Zero (DJNZ) ini merupakan perintah untuk mengurangi nilai register tertentu dengan 1 dan lompat jika hasil pengurangannya belum nol. Contoh ,
MOV R0,#80h
Loop: ...
DJNZ R0,Loop
...
R0 -1, jika belum 0 lompat ke loop, jika R0 = 0 maka program akan meneruskan ke perintah pada baris berikutnya.
3. Instruksi ACALL
Instruksi ini berfungsi untuk memanggil suatu rutin tertentu. Contoh :
...
ACALL TUNDA
...
TUNDA:
...
4. Instruksi RET
Instruksi RETURN (RET) ini merupakan perintah untuk kembali ke rutin pemanggil setelah instruksi ACALL dilaksanakan. Contoh,
ACALL TUNDA
...
TUNDA:
...
RET
5. Instruksi JMP (Jump)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu. Contoh,
Loop:
...
JMP Loop
6. Instruksi JB (Jump if bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika high (1). Contoh,
Loop:
JB P1.0,Loop
...
7. Instruksi JNB (Jump if Not bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika Low (0). Contoh,
Loop:
JNB P1.0,Loop
...
8. Instruksi CJNE (Compare Jump If Not Equal)
Instruksi ini berfungsi untuk membandingkan nilai dalam suatu register dengan suatu nilai tertentu. Contoh,
Loop:
...
CJNE R0,#20h,Loop
Jika nilai R0 tidak sama dengan 20h, maka program akan lompat ke rutin Loop. Jika nilai R0 sama dengan 20h,maka program akan melanjutkan instruksi selanjutnya..
9. Instruksi DEC (Decreament)
Instruksi ini merupakan perintah untuk mengurangi nilai register yang dimaksud dengan 1. Contoh,
MOV R0,#20h R0 = 20h
...
DEC R0 R0 = R0 – 1
...
10.Instruksi INC (Increament)
Instruksi ini merupakan perintah untuk menambahkan nilai register yang dimaksud dengan 1. Contoh,
MOV R0,#20h R0 = 20h
...
INC R0 R0 = R0 + 1
...
2.2.2 Software 8051 Editor, Assembler, Simulator (IDE)
Gambar 2.2 8051 Editor, Assembler, Simulator
Setelah program selesai ditulis, kemudian di-save dan kemudian di-Assemble (di-compile). Pada saat di-assemble akan tampil pesan peringatan dan kesalahan. Jika masih ada kesalahan atau peringatan, itu berarti ada kesalahan dalam penulisan perintah atau ada nama subrutin yang sama, sehingga harus diperbaiki terlebih dahulu sampai tidak ada pesan kesalahan lagi.
Software 8051IDE ini berfungsi untuk merubah program yang kita tuliskan ke dalam bilangan heksadesimal, proses perubahan ini terjadi pada saat peng-compile-an. Bilangan heksadesimal inilah yang akan dikirimkan ke mikrokontroller
2.2.3 Software Downloader
Gambar 2.3 ISP- Flash Programmer 3.a
Cara menggunakannya adalah dengan meng-klik Open File untuk mengambil file heksadesimal dari hasil kompilasi 8051IDE, kemudian klik Write untuk mengisikan hasil kompilasi tersebut ke mikrokontroller.
2.2.4 Motor Langkah (Stepper)
Aplikasi penggunaan motor langkah dapat juga dijumpai dalam bidang industri atau untuk jenis motor langkah kecil dapat di gunakan dalam perancangan suatu alat mekatronik atau robot. Motor langkah berukuran besar digunakan, misalnya, dalam proses pengeboran logam yang menghendaki ketepatan posisi pengeboran, dalam hal ini di lakukan oleh sebuah robot yang memerlukan ketepatan posisi dalam gerakan lengannya dan lain-lain.
Pada gambar di bawah ditunjukkan dasar susunan sebuah motor langkah (stepper).
Gambar 2.4 Diagram motor langkah (stepper)
Magnet permanen N-S berputar kearah medan magnet yang aktif. Apabila kumparan stator dialiri arus sedemikian rupa, maka akan timbul medan magnet dan rotor akan berputar mengikuti medan magnet tersebut. Setiap pengalihan arus ke kumparan berikutnya menyebabkan medan magnet berputar menurut suatu sudut tertentu, biasanya informasi besar sudut putar tertulis pada badan motor langkah yang
A
D B
A C
B U
bersangkutan. Jumlah keseluruhan pengalihan menentukan sudut perputaran motor. Jika pengalihan arus di tentukan, maka rotor akan berhenti pada posisi terakhir. Jika kecepatan pengalihan tidak terlalu tinggi, maka slip akan dapat dihindari. Sehingga tidak di perlukan umpan balik (feedback) pada pengendalian motor langkah.
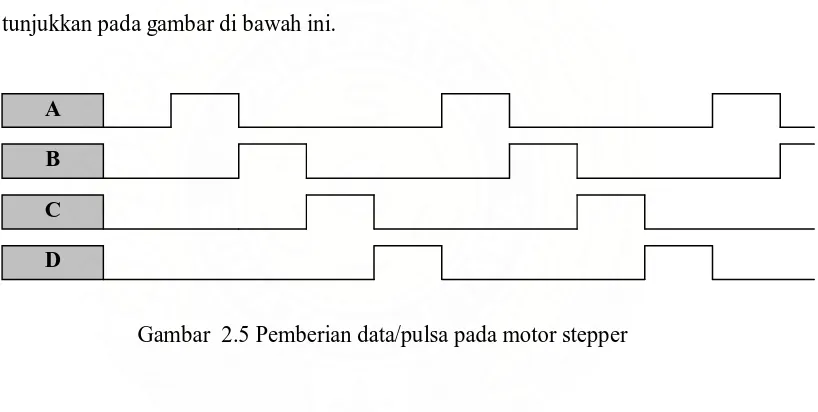
Motor langkah yang akan di gunakan memiliki 4 fase (pole atau kutub), pengiriman pulsa dari mikrokontroler ke rangkaian motor langkah dilakukan secara bergantian, masing-masing 4 data (sesuai dengan jumlah phase-nya), sebagian di tunjukkan pada gambar di bawah ini.
Gambar 2.5 Pemberian data/pulsa pada motor stepper
Pada saat yang sama, untuk tiap motor langkah, tidak boleh ada 2 (dua) masukan atau lebih yang mengandung pulsa sama dengan 1 (high), atau dengan kata lain, pada suatu saat hanya sebuah masukan yang bernilai 1 (satu) sedangkan lainnya bernilai 0 (nol).
2.2.5 Penguat Sinyal 2.2.5.1 Gambaran umum
Penguat operasional (Op - Amp) adalah suatu rangkaian terintegrasi yang berisi beberapa tingkat dan konfigurasi penguat diferensial yang telah dijelaskan di atas. Penguat operasional memilki dua masukan dan satu keluaran serta memiliki penguatan DC yang tinggi. Untuk dapat bekerja dengan baik, penguat operasional memerlukan tegangan catu yang simetris yaitu tegangan yang berharga positif (+V) dan tegangan yang berharga negatif (-V) terhadap tanah (ground).
Operational Amplifier atau di singkat Op - Amp merupakan salah satu komponen
analog yang popular digunakan dalam berbagai aplikasi rangkaian elektronika. Aplikasi penguat operasional popular yang paling sering dibuat antara lain adalah rangkaian
inverter, non-inverter, integrator dan differensiator. Pada bagian ini akan dipaparkan
beberapa aplikasi penguat operasional yang paling dasar, dimana rangkaian feedback (umpan balik) negatif memegang peranan penting. Secara umum, umpan balik positif akan menghasilkan osilasi sedangkan umpan balik negatif menghasilkan penguatan yang dapat terukur.
Ada dua aturan penting dalam melakukan analisa rangkaian penguat operasional berdasarkan karakteristik penguat operasional ideal. Aturan ini dalam beberapa literatur dinamakan golden rule, yaitu :
Aturan 1 : Perbedaan tegangan antara input v+ dan v- adalah nol (v+-v- = 0 / v+ = v- )
Aturan 2 : Arus pada input Penguat operasional adalah nol (i+ = i- = 0)
Inilah dua aturan penting penguat operasional ideal yang digunakan untuk menganalisa rangkaian penguat operasional.
2.2.5.2 Karakteristik Ideal Penguat Operasional
Penguat operasional banyak digunakan dalam berbagai aplikasi karena beberapa keunggulan yang dimilikinya, seperti penguatan yang tinggi, impedansi masukan yang tinggi, impedansi keluaran yang rendah dan lain sebagainya. Berikut ini adalah karakteristik dari Penguat operasional ideal:
1. Penguatan tegangan lingkar terbuka
Penguatan tegangan lingkar terbuka (open loop voltage gain) adalah penguatan diferensial Penguat operasional pada kondisi dimana tidak terdapat umpan balik (feedback). Secara ideal, penguatan tegangan lingkar terbuka adalah:
AVOL = Vo / Vid =
AVOL = Vo/(V1-V2) =
Tanda negatif menandakan bahwa tegangan keluaran VO berbeda fasa dengan
tegangan masukan Vid. Konsep tentang penguatan tegangan tak berhingga
besar daripada tegangan masukan Vid. Dalam kondisi praktis, harga AVOL adalah
antara 5000 (sekitar 74 dB) hingga 100000 (sekitar 100 dB).Tetapi dalam penerapannya tegangan keluaran VO tidak lebih dari tegangan catu yang diberikan
pada Penguat operasional. Karena itu Penguat operasional baik digunakan untuk menguatkan sinyal yang amplitudonya sangat kecil.
2. Tegangan ofset keluaran
Tegangan ofset keluaran (output offset voltage) VOO adalah harga tegangan
keluaran dari Penguat operasional terhadap tanah (ground) pada kondisi tegangan masukan Vid = 0. Secara ideal, harga VOO = 0 V. Penguat operasional yang dapat
memenuhi harga tersebut disebut sebagai Penguat operasional dengan CMR (common mode rejection) ideal.
Tetapi dalam kondisi praktis, akibat adanya ketidakseimbangan dan ketidakidentikan dalam penguat diferensial dalam Penguat operasional tersebut, maka tegangan ofset VOO biasanya berharga sedikit di atas 0 V. Apalagi apabila
tidak digunakan umpan balik maka harga VOO akan menjadi cukup besar untuk
menimbulkan saturasi pada keluaran. Untuk mengatasi hal ini, maka perlu diterapakan tegangan koreksi pada Penguat operasional. Hal ini dilakukan agar pada saat tegangan masukan Vid = 0, tegangan keluaran VO juga = 0.
3. Hambatan Masukan
Hambatan masukan (input resistance) Ri dari Penguat operasional adalah besar
masukan Penguat operasional adalah tak berhingga. Tetapi dalam kondisi praktis, harga hambatan masukan Penguat operasional adalah antara 5 k hingga 20 M, tergantung pada tipe Penguat operasional. Harga ini biasanya diukur pada kondisi Penguat operasional tanpa umpan balik. Apabila suatu umpan balik negatif (negative feedback) diterapkan pada Penguat operasional, maka hambatan masukan Penguat operasional akan meningkat.
Dalam suatu penguat, hambatan masukan yang besar adalah suatu hal yang diharapkan. Semakin besar hambatan masukan suatu penguat, semakin baik penguat tersebut dalam menguatkan sinyal yang amplitudonya sangat kecil. Dengan hambatan masukan yang besar, maka sumber sinyal masukan tidak terbebani terlalu besar.
4. Hambatan Keluaran
Hambatan Keluaran (output resistance) RO dari Penguat operasional adalah
besarnya hambatan dalam yang timbul pada saat Penguat operasional bekerja sebagai pembangkit sinyal. Secara ideal harga hambatan keluaran RO Penguat
operasional adalah = 0. Apabila hal ini tercapai, maka seluruh tegangan keluaran Penguat operasional akan timbul pada beban keluaran (RL), sehingga dalam suatu penguat, hambatan keluaran yang kecil sangat diharapkan.
Dengan diterapkannya umpan balik, maka harga hambatan keluaran akan menurun hingga mendekati kondisi ideal.
5. Lebar Pita
Lebar pita (band width) BW dari Penguat operasional adalah lebar frekuensi tertentu dimana tegangan keluaran tidak jatuh lebih dari 0,707 dari harga tegangan maksimum pada saat amplitudo tegangan masukan konstan. Secara ideal, Penguat operasional memiliki lebar pita yang tak terhingga. Tetapi dalam penerapannya, hal ini jauh dari kenyataan.
Sebagian besar Penguat operasional serba guna memiliki lebar pita hingga 1 MHz dan biasanya diterapkan pada sinyal dengan frekuensi beberapa kiloHertz. Tetapi ada juga Penguat operasional yang khusus dirancang untuk bekerja pada frekuensi beberapa MegaHertz. Penguat operasional jenis ini juga harus didukung komponen eksternal yang dapat mengkompensasi frekuensi tinggi agar dapat bekerja dengan baik.
6. Waktu Tanggapan
hanya beberapa mikrodetik setelah perubahan masukan tersebut umumnya disertai dengan oveshoot yaitu lonjakan yang melebihi kondisi steady state. Tetapi pada penerapan biasa, hal ini dapat diabaikan.
7. Karakteristik Terhadap Suhu
Sebagai mana diketahui, suatu bahan semikonduktor yang akan berubah karakteristiknya apabila terjadi perubahan suhu yang cukup besar. Pada Penguat operasional yang ideal, karakteristiknya tidak berubah terhadap perubahan suhu. Tetapi dalam prakteknya, karakteristik sebuah Penguat operasional pada umumnya sedikit berubah, walaupun pada penerapan biasa, perubahan tersebut dapat diabaikan.
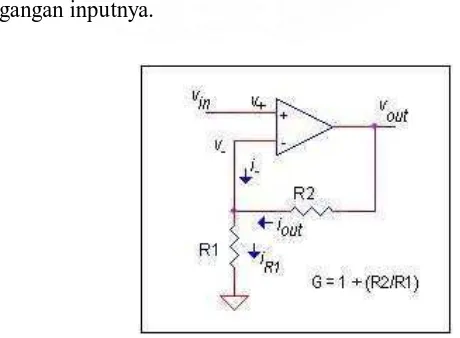
2.2.5.3 Penguat non-inverting
Prinsip utama rangkaian penguat non-inverting adalah seperti yang diperlihatkan pada gambar 2.3 berikut ini. Seperti namanya, penguat ini memiliki masukan yang dibuat melalui input non-inverting. Dengan demikian tegangan keluaran rangkaian ini akan satu fasa dengan tegangan inputnya.
Dengan menggunakan aturan 1 dan aturan 2, kita uraikan dulu beberapa fakta yang ada, antara lain :
vin = v+
v+ = v- = vin.
Dari sini ketahui tegangan jepit pada R2 adalah vout – v- = vout – vin, atau iout = (vout
-vin)/R2. Lalu tegangan jepit pada R1 adalah v- = vin, yang berarti arus iR1 = vin/R1.
Hukum kirchoff pada titik input inverting merupakan fakta yang mengatakan bahwa : iout + i(-) = iR1
Aturan 2 mengatakan bahwa i(-) = 0 dan jika disubsitusi ke rumus yang sebelumnya,
maka diperoleh
iout = iR1 dan Jika ditulis dengan tegangan jepit masing-masing maka diperoleh
(vout – vin)/R2 = vin/R1 yang kemudian dapat disederhanakan menjadi :
vout = vin (1 + R2/R1)
Jika penguatan G adalah perbandingan tegangan keluaran terhadap tegangan masukan, maka didapat penguatan penguat operasional non-inverting :
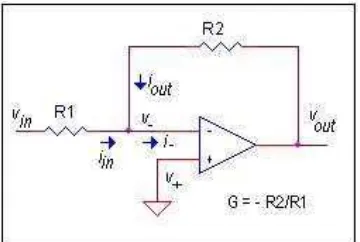
2.2.5.4 Penguat Inverting
Gambar 2.7 Rangkaian dasar penguat inverting
Input non-inverting pada rangkaian ini dihubungkan ke ground, atau v+ = 0. Dengan
mengingat dan menimbang aturan 1 (lihat aturan 1), maka akan dipenuhi v- = v+ = 0.
Karena nilainya = 0 namun tidak terhubung langsung ke ground, input penguat operasional v- pada rangkaian ini dinamakan virtual ground. Dengan fakta ini, dapat
dihitung tegangan jepit pada R1 adalah vin – v- = vin dan tegangan jepit pada reistor R2
adalah vout – v- = vout. Kemudian dengan menggunakan aturan 2, di ketahui bahwa :
iin + iout = i- = 0, karena arus masukan penguat operasional adalah 0.
iin + iout = vin/R1 + vout/R2 = 0
Selanjutnya
vout/R2 = - vin/R1 atau
vout/vin = - R2/R1
Jika penguatan G didefenisikan sebagai perbandingan tegangan keluaran terhadap tegangan masukan, maka dapat ditulis
Impedansi rangkaian inverting didefenisikan sebagai impedansi input dari sinyal masukan terhadap ground. Karena input inverting (-) pada rangkaian ini diketahui adalah 0 (virtual ground) maka impendasi rangkaian ini tentu saja adalah Zin = R1.
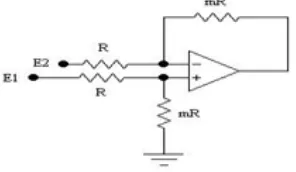
2.2.5.5 Penguat diffrensiator
Penguat Differensial bisa mengukur maupun memperkuat sinyal-sinyal kecil yang terbenam dalam sinyal-sinyal yang jauh lebih besar. Empat tahanan presisi (1 %) dan sebuah penguat operasional membentuk sebuah penguat differensial, seperti terlihat pada gambar 2.2.5 terminal inputnya ada dua, input (-) dan (+), dihubungkan dengan terminal penguat operasional yang terdekat.
Sumber masukan penguat differensial ada 2, yaitu E1 dan E2. Jika E2 dihubung singkat, maka E1 mendapat penguatan pembalik sebesar -mR/R = -m. Karena tegangan keluaran akibat E1 adalah -mE1.
Jika E1 dihubung singkat, maka E2 akan terbagi antara R dan mR, sehingga terminal positif dari penguat operasional menerima tegangan sebesar mendapat penguatan pembalik sebesar -mR/R = -m. Karena tegangan keluaran akibat E1 adalah -mE2/(1+m), dengan penguatan sebesar (1+m).
Karena itu tegangan keluaran akibat E1 adalah:
Dengan demikian jika E1 dan E2 sama-sama dimasukan, maka tegangan keluaran Vo adalah:
Dari persamaan diatas, dapat dilihat bahwa tegangan keluaran dari Penguat differensial sebanding dengan perbedaan tegangan masukan E1 dan E2. Pengali ini adalah merupakan gain diferensial yang ditentukan oleh perbandingan tahanannya.
2.2.5.6 Penguat jumlah (summing amplifier)
Penguat operasional sering digunakan sebagai penjumlah berbagai input sinyal. Berikut ini adalah gambar dari summing amplifier.
Gambar 2.9 Rangkaian dasar penguat jumlah (summing amplifier)
Untuk penguatan tegangan 2 adalah sebagai berikut:
Penguatan tegangan total dari summing amplifier adalah sebagai berikut:
2.2.6 Transistor Sebagai Switching
Disamping sebagai penguat, transistor juga sering digunakan sebagai switching untuk mengontrol suatu beban dengan arus kecil, medium, atau arus besar dalam aplikasi – aplikasi industri. Gambar 2.10 menunjukkan rangkaian transistor sebagai switching.
Gambar 2.10 Transistor sebagai switching
Pada penggunaan transistor sebagai switching tegangan nol volt pada Vbe transistor jenis NPN berarti mengaktipkan transistor tersebut sebagai saklar dengan
Vcc
Rb
Tr Rc
Ic
Ib
BAB III
RANCANGAN SISTEM
3.1 DIAGRAM BLOK
Secara garis besar rangkaian untuk lift 4 lantai terdiri dari 5 blok utama, yaitu rangkaian tombol, rangkaian display, rangkaian mikrokontroler, rangkaian display, rangkaian driver motor stepper dan motor stepper. Diagram blok rangkaian tampak seperti gambar berikut:
Gambar 3.1. Diagram Blok Rangkaian
Gambar di atas merupakan gambar diagram blok dari rangkaian untuk lift 3 lantai. Tombol berfungsi sebagai tombol pemanggil dari masing-masing lantai, dimana tombol ini berada pada setiap lantai. Rangkaian mikrokontroler berfungsi untuk mengolah datayang diterima dari masing-masing timbil kemudian menampilkan pada display dan menggerakkan lift ke atas atau ke bawah. Rangkaian display berfungsi untuk menampilkan nilai dari penekanan tombol, semisal pengguna akan menuju lantai 3,
Tombol Lantai 1
Micro AT89S51
Tombol Lantai 2 Tombol Lantai 3
Vreg stepper berfungsi untuk mengendalikan pergerakan motor stepper, dan motor stepper sendiri berfungsi untuk menaikkan dan menurunkan lift.
3.2 Rangkaian Power Supplay (PSA)
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt digunakan untuk mensupplay tegangan ke seluruh rangkaian, sedangkan keluaran 12 volt digunakan untuk mensuplay tegangan ke motor stepper.. Rangkaian power supplay ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.2 Rangkaian Power Supplay (PSA)
dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan.
Transistor PNP TIP 32 disini berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar.Transistor tipe PNP ini akan aktip jika tegangan pada basis > 0,7 volt dari tegangan positip. Tegangan positip yang dihubungkan ke emitor sebesar 12 volt, sehingga transistor akan aktip jika diberi tegangan yang lebih kecil dari 12 volt – 0,7 volt = 11,3 volt. Dalam kondisi biasa (LM7805 tidak kekurangan arus), maka basis akan mendapatkan tegangan 12 volt, sehingga transistor tidak aktip, emitor tidak terhubung dengan kolektor, sehingga tegangan pada kolektor sama dengan tegangan pada output regulator LM7805 yaitu 5 volt. Namun jika rangkaian membutuhkan arus yang lebih banyak, maka regulator akan mengambil arus dari inputnya, sehingga tegangan pada input regulator akan turun hingga lebih kecil dari 11,3 volt, transistor akan aktip, maka arus akan mengalir dari emitor ke kolektor. Pada transistor ini jika aktip, maka yang mengalir dari emitor ke kolektor adalah arusnya, sedangkan tegangannya tidak, sehingga tegangan pada kolektor tetap 5 volt. Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
3.3 Rangkaian Mikrokontroler AT89S51
5V
Gambar 3.3. Rangkaian Mikrokontroler AT89S51
Mikrokontroler ini memiliki 32 port I/O, yaitu port 0, port 1, port 2 dan port 3. Pin 40 dihubungkan ke sumber tegangan 5 volt. Dan pin 20 dihubungkan ke ground. Rangkaian mikrokontroler ini menggunakan komponen kristal 12 MHz sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
10 10 1 det
tR x C K x F m ik
Jadi 1 mili detik setelah power aktip pada IC kemudian program aktip.
Pin 17 yang merupakan P3.7 dihubungkan dengan transistor dan sebuah LED. Ini dilakukan hanya untuk menguji apakan rangkaian minimum mikrokontroller AT89S51 sudah bekerja atau belum. Dengan memberikan program sederhana pada mikrokontroller tersebut, dapat diketahui apakah rangkaian minimum tersebut sudah bekerja dengan baik atau tidak. Jika LED yang terhubug ke Pin 17 sudah bekerja sesuai dengan perintah yang diberikan, maka rangkaian minimum tersebut telah siap digunakan.
3.4 Rangkaian Tombol perintah
Tombol berfungsi sebagai tombol pemanggil dari masing-masing lantai, dimana tombol ini berada pada setiap lantai. Jika tombol pada lantai 1 ditekan, maka lift akan menuju lantai 1, jika tombol pada lantai 2 ditekan, maka lift akan menuju lantai 2, demikian juga jika tombol pada lantai 3 atau lantai 4 yang ditekan.
4K7
P1. 0 AT89S51
VCC 5V
Tombol
Gambar 3.4. Rangkaian Tombol perintah
3.5 Rangkaian Display Seven Segment
Untuk menampilkan angka dari setiap penekanan tombol, maka dibutuhkan sebuah display untuk menampilkannya. Pada alat ini, display yang digunakan adalah display seven segmen, yang terdiri dari 1 buah seven segmen.
Display seven segmen ini akan diaktipkan oleh IC 4094 yang merupakan IC serial to paralel (serial in paralel out). Jadi data dimasukkan ke dalam IC ini dengan mengirimkan data serial. Keluaran dari IC 4094 ini langsung dihubungkan ke seven segmen, sehingga data serial yang diterima oleh input IC ini akan ditampilkan nilainya pada seven segmen.
5V dengan seven segmen agar data tersebut dapat ditampilkan dalam bentuk angka. Seven segmen yang digunakan adalah aktip low, ini berarti segmen akan hidup jika diberi data low (0) dan segmen akan mati jika diberi data high (1).
3.6 Rangkaian Driver Motor Stepper
Gambar 3.6. Rangkaian Driver Motor Stepper
Untuk mempermudah penjelasan, maka rangkaian di atas dikelompokkan menjadi rangkaian. Pada rangkaian di atas, jika salah input rangkaian I yang dihubungkan ke mikrokontroler diberi logika high dan input pada rangkaian lainnya diberi logika low, maka kedua transistor tipe NPN C945 pada rangkaian I akan aktip. Hal ini akan membuat kolektor dari kedua transistor C945 pada rangkaian I akan mendapat tegangan 0 volt dari ground. Kolektor dari transistor C945 yang berada di sebelah kiri atas diumpankan ke basis dari transistor tipe PNP TIP 127 sehingga basis dari transistor TIP 127 mendapatkan tegangan 0 volt yang menyebabkan transistor ini aktip (transistor tipe PNP akan aktip jika tegangan pada basis lebih kecil dari 4,34 volt). Aktipnya transistor PNP TIP 127 ini akan mengakibatkan kolektornya terhubung ke emitor sehingga kolektor mendapatkan tegangan 15 volt dari Vcc.
medan magnet. Medan magnet inilah yang akan mnarik motor untuk mengarah ke arah kumparan yang menimbulkan medan magnet tersebut.
Sedangkan rangkaian II, III dan IV karena pada inputnya diberi logika low, maka kumparannya tidak menimbulkan medan magnet, sehingga motor tidak tertarik oleh kumparan-kumparan tersebut.
Demikian seterusnya untuk menggerakkan motor agar berputar maka harus diberikan logika high secara bergantian ke masing-masing input dari masing-masing rangkaian.
Dengan demikian perputaran motor stepper sudah dapat dikendalikan melalui mikrokontroler, sehingga proses turun atau naiknya lift dapat di atur melalui program yang ada pada mikrokontroler.
3.7 Rangkaian Penguat Sinyal
Rangkaian ini berfungsi untuk memperkuat sinyal yang dihasilkan oleh masing-masing sensor sehingga cukup kuat untuk memberikan logika high atau logika low kepada mikrokontroler AT89S51. Rangkaian penguat sinyal ditunjukkan pada gambar 3.7 berikut :
Sinyal dari sensor akan diperkuat oleh transistor A733 sebagai penguat depan sekaligus menyesuiakan impedansi input terhadap Op-Amp 358. Op-Amp LM 358 sebagai penguat ganda non inverting memperkuat sinyal yang dihasilkan oleh penguat depan yaitu transistor A733. Pada Op_Amp pertama sinyal akan dikuatkan sampai maksimal 100 kali penguatan. Kemudian output dari Op-Amp pertama ini akan diinputkan ke Op-Amp kedua untuk dikuatkan lagi sampai maksimal 100 kali penguatan. Dengan demikian output dari Op-Amp kedua mampu mendrive transistor C945 untuk menekan logika high atau logika low pada pin input mikrokontroler AT89S51.
Transistor C945 ini merupakan transistor jenis NPN. Transistor ini akan aktip (saturasi) jika pada basis diberikan tegangan lebih besar dari 0,7 volt. Jika transistor ini aktip, maka kolektor akan terhubung ke emitor sehingga tegangan pada kolektor akan jatuh menjadi 0 volt. Jatuhnya tegangan pada kolektor dari 5 volt ke 0 volt inilah yang merupakan indikasi adanya rembesan air yang diterima oleh sensor air. Jatuhnya tegangan pada kolektor dari 5 volt ke 0 volt ini juga akan menyebabkan LED indikator menyala.
Start
3.8 Diagram Alir Pemrograman
Program diawali dengan start, yang berarti bahwa rangkaian diaktipkan. Selanjutnya program akan mengecek kondisi hujan (sensor hujan), jika tidak ada sinyal dari sensor ini, maka program akan mengecek kondisi sensor malam (sensor malam), seterusnya program akan terus mengecek kondisi dari semua sensor. Sensor malam merupakan sensor pendeteksi siang hari.
BAB IV
PENGUJIAN ALAT DAN PROGRAM
4.1 Pengujian Rangkaian Power Supplay (PSA)
Pengujian pada bagian rangkaian power supplay ini dapat dilakukan dengan mengukur tegangan keluaran dari rangkaian ini dengan menggunakan volt meter digital. Dari hasil pengujian diperoleh tegangan keluaran pertama sebesar + 5,1 volt. Tegangan ini dipergunakan untuk mensupplay tegangan ke seluruh rangkaian. Mikrokontroler AT89S51 dapat bekerja pada tegangan 4,0 sampai dengan 5,5 volt, sehingga tegangan 5,1 volt ini cukup untuk mensupplay tegangan ke mikrokontroler AT89S51. Dengan demikian rangkaian ini sudah dapat bekerja dengan baik. Sedangkan tegangan keluaran kedua adalah sebesar +12,3 volt.
4.2 Pengujian Rangkaian Mikrokontroller AT89S51
Untuk mengetahui apakah rangkaian mikrokontroller AT89S51 telah bekerja dengan baik, maka dilakukan pengujian.Pengujian bagian ini dilakukan dengan memberikan program sederhana pada mikrokontroller AT89S51. Programnya adalah sebagai berikut:
Loop:
Setb P3.7
Acall tunda
Clr P3.7
Acall tunda
Sjmp Loop
Mov r7,#255
Tnd: Mov r6,#255
Djnz r6,$
Djnz r7,tnd
Ret
Program di atas bertujuan untuk menghidupkan LED yang terhubung ke P3.7 selama ± 0,13 detik kemudian mematikannya selama ± 0,13 detik secara terus menerus. Perintah Setb P3.7 akan menjadikan P3.7 berlogika high yang menyebabkan transistor aktif, sehingga LED menyala. Acall tunda akan menyebabkan LED ini hidup selama beberapa saat. Perintah Clr P3.7 akan menjadikan P3.7 berlogika low yang menyebabkan transistor tidak aktif sehingga LED akan mati. Perintah Acall tunda akan menyebabkan LED ini mati selama beberapa saat. Perintah Sjmp Loop akan menjadikan program tersebut berulang, sehingga akan tampak LED tersebut tampak berkedip.
Lamanya waktu tunda dapat dihitung dengan perhitungan sebagai berikut :
Kristal yang digunakan adalah kristal 12 MHz, sehingga 1 siklus mesin membutuhkan
waktu = 12 1
12 MHz mikrodetik.
Mnemonic Siklus Waktu Eksekusi
MOV Rn,#data 2 2 x 1 µd = 2 µd
DJNZ 2 2 x 1 µd = 2 µd
Tunda:
mov r7,#255 2
Tnd: mov r6,#255 2
djnz r6,$ 255 x 2 = 510 x 255 = 130.054 = 130.057 µd
djnz r7,tnd 2
ret 1
Jadi waktu yang dibutuhkan untuk mengerjakan program di atas adalah 130.057 µdetik atau 0,130057 detik dan dapat dibulatkan menjadi 0,13 detik.
Jika program tersebut diisikan ke mikrokontroller AT89S51, kemudian mikrokontroller dapat berjalan sesuai dengan program yang diisikan, maka rangkaian minimum mikrokontroller AT89S51 telah bekerja dengan baik.
4.3 Pengujian Rangkaian Tombol
Pengujian pada rangkaian ini dapat dilakukan dengan menekan tombol, kemudian mengukur tegangan output dari rangkaian tersebut. Dari hasil pengujian didapatkan pada saat tombol tidak ditekan, maka output dari rangkaian ini adalah 4,9 volt. Ketika terjadi penekanan tombol, maka output dari rangkaian ini adalah 0 volt. Dengan demikian rangkaian ini telah berfungsi dengan baik.
Pengujian selanjutnya adalah dengan menghubungkan rangkaian tombol ini dengan rangkaian mikrokontroler yang telah diberi program sebagai berikut :
Program di atas akan menunggu adanya sinyal low yang dikirimkan tombol, dimana tombol tersebut dihubungkan dengan P1.0. Program akan terus menunggu sampai ada sinyal low yang dikirimkan oleh tombol. Jika ada sinyal low yang dikirimkan oleh tombol, maka program akan menghidupkan LED indikator yang dihubungkan ke P3.7.
4.4 Pengujian Rangkaian Display Seven Segment
Pengujian pada rangkaian ini dapat dilakukan dengan menghubungkan rangkaian ini dengan rangkaian mikrokontroler, kemudian memberikan data tertentu pada port serial dari mikrokontroler. Seven segmen yang digunakan adalah common anoda, dimana semen akan menyala jika diberi logika low (0) dan sebaliknya segmen akan mati jika diberi logika high (1).
Dari hasil pengujian diperoleh data yang harus dikirimkan ke port serial untuk menampilkan angka desimal adalah sebagai berikut:
Tabel.4.1 Penampilan Angka Decimal Angka Data yang dikirim
1 0ECH
2 18H
3 88H
Program yang diisikan pada mikrokontroler untuk menampilkan nilai-nilai tersebut adalah sebagai berikut:
bil1 equ 0ech
bil2 equ 18h
bil3 equ 88h
Loop:
mov sbuf,#bil0
Jnb ti,$
Clr ti
sjmp loop
Program di atas akan menampilkan angka 0 pada semua seven segmen. Sedangkan untuk menampilkan 3 digit angka yang berbeda pada seven segmen adalah dengan mengirimkan ke 3 data angka yang akan ditampilkan pada seven segmen. Programnya adalah sebagai berikut :
Loop:
mov sbuf,#bil1
Jnb ti,$
mov sbuf,#bil2
Jnb ti,$
Clr ti
mov sbuf,#bil3
Jnb ti,$
Clr ti
sjmp loop
Program di atas akan menampilkan angka 1 pada seven segmen ketiga, angka 2 pada seven segmen kedua dan angka 3 pada seven segmen pertama.
4.5 Pengujian Rangkaian Driver Motor Stepper
Pengujian pada rangkaian jembatan H ini dilakukan dengan menghubungkan input rangkaian driver motor stepper ini dengan rangakaian mikrokontroler AT89S51 dan menghubungkan output dari rangkaian driver motor stepper ini dengan motor stepper, kemudian memberikan program sebagai berikut:
mov a,#11h
putar:
mov P0,a
acall tunda
Rl a
jmp putar
nilai port 0 adalah 11h. ini berarti P0.0 dan P0.4 mendapatkan logika high sedangkan yang lainnya mendapatkan logika low, seperti table di bawah ini,
P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0
P0 0 0 0 1 0 0 0 1
Program dilanjutkan dengan memanggil rutin tunda. Lamanya tunda akan mempengaruhi kecepatan perputaran motor. Semakin lama maka tunda, maka perputaran motor akan semakin lambat. Perintah berikutnya adalah Rl a,perintah ini akan memutar nilai yang ada pada accumulator (a), seperti tampak pada table di bawah ini,
a 0 0 0 1 0 0 0 1
Rl
a 0 0 1 0 0 0 1 0
Dst...
Nilai pada accumulator (a) yang awalnya 11h, setelah mendapat perintah Rl a, maka nilai pada accumulator (a) akan merubah menjadi 22h. Kemudian program akan melihat apakah kondisi sensor buka pintu dalam keadaan high (1) atau low (0). Jika high (1),
Nilai yang ada pada accumulator (a), akan kembali diisikan ke port 0, maka nilai di port 0 akan berubah menjadi 22h, ini berarti P0.1 dan P0.5 mendapatkan logika high sedangkan yang lainnya mendapatkan logika low, seperti table di bawah ini,
P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0
P0 0 0 1 0 0 0 1 0
mendapatkan nilai high (1) secara bergantian. Hal ini menyebabkan motor stepper akan berputar membuka pintu.Hal yang sama juga berlaku ketika motor berputar kaearah sebaliknya, perbedaannya hanya pada perintah rotate. Jika pada perintah berlawanan arah jarum jam digunakan rotate left ( Rl ), maka pada perintah searah jarum jam digunakan perintah rotate right ( Rr). Perputaran perintah Rr diperlihatkan pada table berikut,
a 1 0 0 0 1 0 0 0
R r
a 0 1 0 0 0 1 0 0
4.6 Pengujian Program
tombol1 bit p3.5 ;tombol1 terhubung ke p3.5
tombol2 bit p3.6 ;tombol2 terhubung ke p3.6
tombol3 bit p3.7 ;tombol3 terhubung ke p3.7
tombol_turun bit p3.4 ;tombol turun terhunung ke p3.4 tombol_naik bit p3.3 ;tombol naik terhubung ke p3.3
sensor1 bit p2.0 ;sensor1 terhubung ke p2.0
jb tombol_naik,turun ;tombol naik ditekan?jika tidak ke routine turun sjmp run_naik ;jika ditekan, ke routine run_naik
;= = = tombol turun = = =; turun:
jb tombol_turun,naik ;tombol turun ditekan?jika tidak ke routine naik sjmp run_turun ;jika ditekan, keroutine run_turun
;= = = routine lift naik = = =;
jb tombol2,naik_lantai3 ;tombol 2 ditekan?jika tidak ke routine naik_lantai3 call lantai2 ;panggil routine lantai 2
sjmp naik ;kembali ke routine naik naik_lantai3:
sjmp naik ;kembali ke routine naik lantai2:
mov p0,a ;isikan nilai a ke p0
call delay_step ;panggil routine delay_step rr a ;putar kanan nilai pada alamat a
jnb sensor2,lantai2 ;sensor 2 mendpt data?jika tidak terus ke lantai 2 call angka2 ;jika ya tampil angka 2
mov p0,#0h ;isikan nilai 0h ke p0(matikan motor)
ret ;kembali ke routine pemanggil
lantai3:
mov p0,a ;isikan nilai a ke p0
call delay_step ;panggil routine delay_step rr a ;putar kanan nilai pada alamat a
jnb sensor3,lantai3 ;sensor 3 mendpt data?jika tidak terus ke lantai 3 call angka3 ;jika ya tampil angka 3
jb tombol1,turun_lantai2 ;tombol 1 ditekan?jika tdk ke routine turun_lantai 2 call floor1 ;panggil routine floor 1
ljmp turun ;kembali ke routine turun turun_lantai2:
jb tombol2,turun_lantai1 ;tombol 2 ditekan?jika tdk ke routine turun_lantai 1 call floor2 ;panggil routine floor 2
ljmp turun ;kembali ke routine turun floor1:
mov p0,a ;isikan nilai a ke p0
call delay_step ;panggil routine delay_step rl a ;putar kiri nilai pada alamat a
jnb sensor1,floor1 ;sensor 2 mendpt data?jika tidak terus ke floor 1 call angka1 ;jika ya tampil angka 1
mov p0,#0h ;isikan nilai 0h ke p0
ret ;kembali ke routine pemanggil
floor2:
mov p0,a ;isikan nilai a ke p0
call delay_step ;panggil routine delay_step rl a ;putar kiri nilai pada alamat a
mov p0,#0h ;isikan nilai 0h ke p0 kurangi nilai r6 sampai 0
ret ;kembali ke routine pemanggil
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil pelaksanaan perancangan alat hingga pengujian dan pembahasan sistem maka penulis dapat menarik kesimpulan, antara lain:
a. Untuk mengangkat/menurunkan lift digunakan motor stepper, dimana motor stepper ini hanya bisa mengangkat beban yang ringan.
b. Motor stepper tidak dapat dikendalikan langsung oleh mikrokontroler, sehingga dibutuhkan rangkaian driver sebagai sarana untuk mengendalikannya.
c. Digunakan motor stepper pada alat ini karena pergerakan motor stepper dapat diatur presisi.
5.2 Saran
Setelah melakukan penelitian ini diperoleh beberapa hal yang dapat dijadikan saran untuk dapat melakukan penelitian lebih lanjut, yaitu:
a. Penulis berharap alat ini dapat dikembangkan lagi sehingga dapat dimanfaatkan untuk kepentingan umum.
DAFTAR PUSTAKA
Agfianto, Belajar Mikrokontroler AT89C51/52/55 Teori dan Aplikasi, Edisi Kedua, Penerbit: Gava Media, Yogyakarta, 2004
Agfianto, Teknik Antarmuka Komputer: Konsep dan Aplikasi, Edisi Pertama, Penerbit: Graha Ilmu, Yogyakarta, 2002
Andi, Panduan Praktis Teknik Antarmuka dan Pemrograman Mikrokontroler AT89C51, Penerbit PT Elex Media Komputindo, Jakarta 2003