Pembuatan Alat Ukur Kecepatan Angin Dan Penunjuk Arah Angin Berbasis Mikrokontroller AT-Mega 8535
SKRIPSI
MAYA AZLINA 110821018
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PEMBUATAN ALAT UKUR KECEPATAN ANGIN
DAN PENUNJUK ARAH ANGIN BERBASIS MIKROKONTROLLER AT-MEGA8535
Kategori : SKRIPSI
Nama : MAYA AZLINA
Nomor Induk Mahasiswa : 110821018
Program Studi : SARJANA (S1) FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, September 2013
Diketahui/disetujui oleh
Ketua Departemen Fisika FMIPA USU Pembimbing
Dr. Marhaposan Situmorang Drs. Takdir Tamba,M.Eng.SC
PERNYATAAN
Pembuatan Alat Ukur Kecepatan Angin Dan Penunjuk Arah Angin Berbasis Mikrokontroller AT-Mega 8535
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, September 2013
PENGHARGAAN
Puji dan syukur penulis ucapkan kepada Allah Subhanahuwata’ala Yang Maha Pengasih lagi Maha Penyayang atas segala rahmat dan hidayah-Nya, sehingga penulis dapat menyelesaikan Skripsi ini dalam waktu yang telah ditetapkan yang merupakan sebagian syarat guna mencapai gelar Sarjana. Shalawat dan salam tak lupa penulis hadiahkan kehadirat Nabi Muhammad SAW.
Dalam kesempatan ini, penulis ingin mengucapkan terimakasih kepada semua pihak yang telah memberikan dukungan baik moril maupun materil. Untuk itu penulis ingin mengucapkan banyak terimakasih kepada :
Keluarga tercinta yang penulis sayangi khususnya kedua orang tua, Ayahanda Aziz dan Ibunda Erlinawati SPd, Adik Muhammad Fadil dan Adelia Azlina yang senantiasa mendukung penulis untuk segera menyelesaikan Skripsi.
Keluarga besar Universitas Sumatera Utara khususnya Departemen Fisika: - Dekan FMIPA Universitas Sumatera Utara : Dr.Sutarman,M.Sc
- Ketua Departemen Fisika : Dr. Marhaposan Situmorang,M.Si - Sekertaris : Drs.Syahrul Humaidi,M.Sc
- Koordinator Ekstensi : Drs.Herli Ginting,MS
Penulis juga mengucapkan terimakasih yang sebesar-besarnya kepada Drs. Takdir Tamba,M.Eng.Sc, Dr. Bisman P Perangin angin, Drs. Syahrul Humaidi,M.Sc dan Dr. Kerista Sebayang,MS yang telah memberikan panduan dan penuh kepercayaan kepada saya untuk menyempurnakan kajian ini. Panduan ringkas,padat dan professional telah diberikan kepada saya agar dapat menyelesaikan skripsi ini.
Dengan penuh kerendahan hati, penulis mengharap kritik dan saran dari semua pihak atas segala kekurangan dalam Skripsi ini, guna perbaikan dikemudian hari. Demikianlah penghargaan ini saya sampaikan, saya ucapkan terimakasih.
Wassalamu’alaikum Wr.Wb.
Medan, September 2013 Penulis
ABSTRAK
Akuisisi data kecepatan dan arah angin dibutuhkan untuk mendapatkan data yang akan digunakan dalam berbagai sector kehidupan. Dalam skripsi ini penulis merancang alat ukur kecepatan dan arah angin berbasis mikrokontroller. Tujuan dari penulisan skripsi ini adalah untuk menghasilkan suatu alat pengukur kecepatan dan arah angin yang murah,handal. Untuk keperluan ilmu pengetahuan,khususnya mengenai Metrologi dan geofisika diperlukan suatu alat yang dapat mengukur kecepatan angin dan arah angin. Dalam skripsi ini, dibuat dua perangkat keras yaitu untuk mengukur kecepatan angin dan untuk menunjukan arah angin. Alat yang digunakan untuk mengukur kecepatan angin menggunakan sensor optocoupler sebagai transducer. Alat ini dibuat sedemikian hingga dapat mengukur kecepatan angin minimal 1 m/s dan maksimal 60 m/s. Sedangkan untuk menunjukan arah angin menggunakan sensor rotary encoder yaitu suatu sensor digital yang keluarannya berupa bit-bit digital sehingga mampu memenunjukan arah angin dari 0 hingga 360 dengan ketelitian 0,50.
ABSTRACT
Data acquisition speed and wind direction are needed to obtain data to be used in various sectors of life. In this paper the authors designed a measure wind speed and direction based microcontroller. The purpose of this paper is to generate a measure wind speed and direction are cheap,reliable. For the purposes of science, especially concerning meteorological and geophysical need a tool that can measure wind speed and wind direction. In this paper, made two pieces of hardware to measure the wind speed and wind direction for the show. The tools used to measure wind speed using optocoupler sensor as a transducer. This tool is made so that can measure wind speed of at least 1 m / s and a maximum of 60 m / s. While to indicate wind direction using a rotary encoder sensor is a digital sensor that outputs a digital bits so as to memenunjukan wind direction from 0 to 360 with 0.50 accuracy.
2.9.2 Kapasitor 19
2.9.3 Induktor 20
2.9.4 Dioda 21
2.9.5 Regulator LM317 22
2.9.6 Trafo CT Step down 23
2.9.7 Kabel 23
BAB III Perancangan dan Cara Pembuatan Alat 24
3.1 Pengukuran Kecepatan Angin 25
3.1.1 Mekanik Pengukuran Kecepatan Angin 25
3.1.2 Sensor Kecepatan 26
3.1.3 Schmitt Trigger 27
3.1.4 Mikrokontroller AT-Mega 8535 untuk kecepatan angin 27
3.2 Penentu Arah Angin 28
3.2.1 Mekanik Penentu Arah Angin 28
3.2.2 Sensor Rotary Encoder 29
3.2.3 Mikrokontroller AT-Mega 8535 untuk arah angin 30
3.2.4 Sensor Kompas Digital CMPS03 30
3.3 Flowchart 32
BAB IV Pengujian Alat dan Analisis 33
4.1 Pengujian Alat Ukur Kecepatan Angin 33
4.2 Pengujian Alat Ukur Penentu Arah Angin 39
BAB V Kesimpulan dan Saran 43
5.1 Kesimpulan 43
5.2 Saran 43
DAFTAR GAMBAR
Halaman
Gambar 2.1 Mikrokontroller AT-Mega 8535 4
Gambar 2.2 Diagram Pin AT-Mega 8535 6
Gambar 2.8 Kombinasi Emitter dan Detector 10
Gambar 2.9 Rotary Encoder 11
Gambar 2.10 Prinsip Kerja Rotary Encoder 12
Gambar 2.11 Piringan Dari Absolute Encoder 12
Gambar 2.12 Kode Binary Absolute Encoder 13
Gambar 2.13 Kode Gray Absolute Encoder 13
Gambar 2.14 Kode Binary dan Kode Gray 14
Gambar 2.16 RTC DS1307 15
Gambar 2.17 Sensor Magnetic Compas CMPS03 16
Gambar 2.18 Rangkaian Aplikasi dari Sensor Magnetic Compas CMPS03 17
Gambar 2.20 Anemometer 18
Gambar 2.21 Resistor 19
Gambar 2.22 Kapasitor 20
Gambar 2.23 Induktor 21
Gambar 2.24 Dioda 21
Gambar 2.25 Rangkaian Internal LM317 22
Gambar 3.1 Diagram Blok 24
Gambar 3.2 Mekanik Baling – Baling dan Piringan sensor 25
Gambar 3.3 Piringan dikompel dengan baling-baling 26
Gambar 3.4 Rangkaian sensor untuk piringan sensor 26
Gambar 3.8 Prinsip kerja rotary encoder 29
Gambar 3.9 Control output NPN open collector 30
Gambar 3.10 Rangkaian aplikasi dari sensor magnetic compass CMPS03 31
DAFTAR TABEL
Halaman
Tabel 2.3 Penjelasan Pin pada Mikrokontroller AT-Mega8535 7
Tabel 2.4 Penjelasan Pin pada Port A 8
Tabel 2.5 Penjelasan Pin pada Port B 8
Tabel 2.6 Penjelasan Pin pada Port C 9
Tabel 2.7 Penjelasan Pin pada Port D 10
Tabel 2.15 Output Absolute Encoder 14
Tabel 2.19 Kaki-Kaki LCD 2x16 18
Tabel 4.1 Data Pengukuran Kecepatan Angin Di Bandara 34
Tabel 4.2 Data Pengukuran Kecepatan Angin Di Pelabuhan Belawan 34 Tabel 4.3 Data Pengukuran Kecepatan Angin Di Daratan Binjai 35
Tabel 4.4 Perhitungan Simpangan Kecepatan Angin 35
Tabel 4.5 Perhitungan Kesalahan Rata-Rata Kecepatan Angin 37
Tabel 4.6 Hasil Pengujian Alat Ukur Arah Angin 39
Tabel 4.7 Perhitungan Simpangan Arah Angin 40
ABSTRAK
Akuisisi data kecepatan dan arah angin dibutuhkan untuk mendapatkan data yang akan digunakan dalam berbagai sector kehidupan. Dalam skripsi ini penulis merancang alat ukur kecepatan dan arah angin berbasis mikrokontroller. Tujuan dari penulisan skripsi ini adalah untuk menghasilkan suatu alat pengukur kecepatan dan arah angin yang murah,handal. Untuk keperluan ilmu pengetahuan,khususnya mengenai Metrologi dan geofisika diperlukan suatu alat yang dapat mengukur kecepatan angin dan arah angin. Dalam skripsi ini, dibuat dua perangkat keras yaitu untuk mengukur kecepatan angin dan untuk menunjukan arah angin. Alat yang digunakan untuk mengukur kecepatan angin menggunakan sensor optocoupler sebagai transducer. Alat ini dibuat sedemikian hingga dapat mengukur kecepatan angin minimal 1 m/s dan maksimal 60 m/s. Sedangkan untuk menunjukan arah angin menggunakan sensor rotary encoder yaitu suatu sensor digital yang keluarannya berupa bit-bit digital sehingga mampu memenunjukan arah angin dari 0 hingga 360 dengan ketelitian 0,50.
ABSTRACT
Data acquisition speed and wind direction are needed to obtain data to be used in various sectors of life. In this paper the authors designed a measure wind speed and direction based microcontroller. The purpose of this paper is to generate a measure wind speed and direction are cheap,reliable. For the purposes of science, especially concerning meteorological and geophysical need a tool that can measure wind speed and wind direction. In this paper, made two pieces of hardware to measure the wind speed and wind direction for the show. The tools used to measure wind speed using optocoupler sensor as a transducer. This tool is made so that can measure wind speed of at least 1 m / s and a maximum of 60 m / s. While to indicate wind direction using a rotary encoder sensor is a digital sensor that outputs a digital bits so as to memenunjukan wind direction from 0 to 360 with 0.50 accuracy.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Angin adalah udara yang bergerak akibat adanya perbedaan tekanan udara dengan arah aliran angin dari tempat yang memiliki tekanan tinggi ke tempat yang bertekanan rendah atau dari daerah yang memiliki suhu / temperatur rendah ke wilayah bersuhu tinggi.
Anemometer adalah sebuah perangkat yang digunakan untuk mengukur kecepatan angin yang banyak dipakai dalam bidang Metrologi dan geofisika atau stasiun perkiraan cuaca. Kecepatan atau kecepatan angin diukur dengan anemometer cup, instrumen dengan tiga atau empat logam berlubang kecil belahan ditetapkan, sehingga mereka menangkap angin dan berputar tentang batang vertikal. Sebuah catatan perangkat listrik revolusi dari cangkir dan menghitung kecepatan angin.
Untuk keperluan ilmu pengetahuan, khususnya mengenai Metrologi dan geofisika diperlukan suatu alat yang dapat mengukur kecepatan angin dan menentukan arah angin. Dengan memperhatikan hal tersebut maka penulis tertarik untuk mengembangkan suatu alat untuk mengukur kecepatan angin dan sekaligus menentukan arahnya. Angin juga berpengaruh dalam mengatur masalah transportasi laut yaitu menggerakan kapal dalam melayari lautan. Meski sudah jarang kapal laut menggunakan layar, dan berganti menggunakan bahan bakar batu bara ataupun solar, tetap saja angin diperlukan untuk menggerakan kapal-kapal itu. Apabila angin tidak ada, maka gerak kapal akan terhenti secara total,sekali pun menggunakan tenaga nuklir. Karena bahan bakar ini terbakar dengan perantara gas oksigen yang ada di udara.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang ada, maka perumusan dari masalah pada penelitian ini, adalah:
1. Bagaimana merancang alat ukur kecepatan angin dan penunjuk arah angin berbasis mikrokontroller AT-Mega 8535.
2. Bagaimana cara kerja alat ukur kecepatan angin dan penunjuk arah angin berbasis mikrokontroller AT-Mega 8535.
1.3 Batas Masalah
1. Anemometer yang digunakan adalah anemometer buatan sendiri. 2. Mikrokontroller yang digunakan adalah AT-Mega 8535
3. Display yang digunakan adalah LCD 2x16
4. Kompas yang digunakan adalah module cmps03 buatan devantech 5. Port RS 232 tersedia untuk Interfacing jika diperlukan.
1.4 Tujuan Penelitian
1. Membuat anemometer dilengkapi kompas digital sebagai penunjuk arah angin.
2. Membuat anemometer sederhana untuk keperluan mengukur kecepatan dan arah angin di Bandara dalam penerbangan, di Laut dalam pelayaran dan di sawah dalam bidang pertanian.
1.5 Manfaat Penelitian
1. Anemometer dengan kompas penunjuk arah angin diharapkan dapat digunakan untuk umum ataupun disekolah serta laboratorium untuk keperluan dalam mengukur kecepatan dan arah angin.
1.6.1 SISTEMATIKA PENULISAN
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika penulisan dalam skripsi ini sebagai berikut:
BAB I. PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, serta sistematika penulisan.
BAB II. TEORI DASAR DAN PENDUKUNG
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung yang digunakan dalam pembahasan. Teori pendukung itu antara lain mikrokontroller
AT-Mega 8535, Anemometer.
BAB III. RANCANGAN SISTEM
Pada bab ini akan dibahas perancangan dari alat, yaitu diagram blok dari rangkaian, skematik dari masing-masing rangkaian dan diagram alir dari program yang akan diisikan ke mikrokontroller AT-Mega 8535.
BAB IV. PENGUJIAN ALAT DAN PROGRAM
Pada bab ini meliputi hasil pengujian dari rangkaian dan cara kerja sistem serta penjelasan mengenai program yang digunakan.
BAB V. KESIMPULAN DAN SARAN
BAB II
TEORI DASAR DAN PENDUKUNG
2.1 Mikrokontroller AT-Mega 8535
Mikrokontroller merupakan sebuah sistem komputer yang seluruh atau sebagian besar elemennya dikemas dalam satu chip IC, sehingga sering disebut single chip microcomputer. Lebih lanjut, mikrokontroler merupakan sistem komputer yang mempunyai satu atau beberapa tugas yang sangat spesifik, berbeda dangan PC (Personal Computer) yang memiliki beragam fungsi. Perbedaan lainnya adalah perbandingan RAM dan ROM yang sangat berbeda antara komputer dengan mikrokontroller.
Gambar 2.1 Mikrokontroller AT-Mega 8535
Mikrokontroler ATmega8535 memiliki beberapa fitur atau spesifikasi yang menjadikannya sebuah solusi pengendali yang efektif untuk berbagai keperluan. Fitur-fitur tersebut antara lain:
1. Saluran I/O sebanyak 32 buah, yang terdiri atas Port A, B, C dan D 2. ADC (Analog to Digital Converter)
3. Tiga buah Timer/Counter dengan kemampuan perbandingan 4. CPU yang terdiri atas 32 register
5. Watchdog Timer dengan osilator internal 6. SRAM sebesar 512 byte
7. Memori Flash sebesar 8kb dengan kemampuan read while write 8. Unit Interupsi Internal dan External
9. Port antarmuka SPI untuk men-download program ke flash 10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi 11. Antarmuka komparator analog
12. Port USART untuk komunikasi serial.
2.1.1 Konfigurasi Pin AT-Mega 8535
Gambar 2.2 Diagram Pin AT-Mega 8535
Berikut ini adalah tabel penjelasan mengenai pin yang terdapat pada mikrokontroler ATMega8535:
Vcc Tegangan suplai (5 volt)
GND Ground
RESET Input reset level rendah, pada pin ini selama lebih dari panjang pulsa minimum akan menghasilkan reset walaupun clock sedang berjalan. RST pada pin 9 merupakan reset dari AVR. Jika pada pinini diberi masukan lowselama minimal 2 machine cyclemaka sistem akan di-reset.
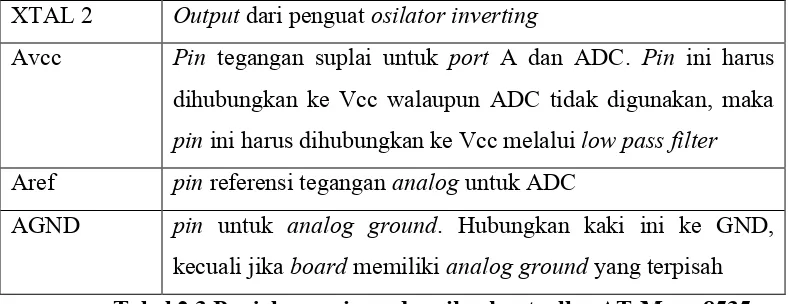
XTAL 2 Outputdari penguat osilator inverting
Avcc Pin tegangan suplai untuk port A dan ADC. Pin ini harus dihubungkan ke Vcc walaupun ADC tidak digunakan, maka pinini harus dihubungkan ke Vcc melalui low pass filter Aref pinreferensi tegangan analoguntuk ADC
AGND pin untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika boardmemiliki analog groundyang terpisah Tabel 2.3 Penjelasan pin pada mikrokontroller AT-Mega 8535
Berikut ini adalah penjelasan dari pin mikrokontroler ATMega8535 menurut port-nya masing-masing:
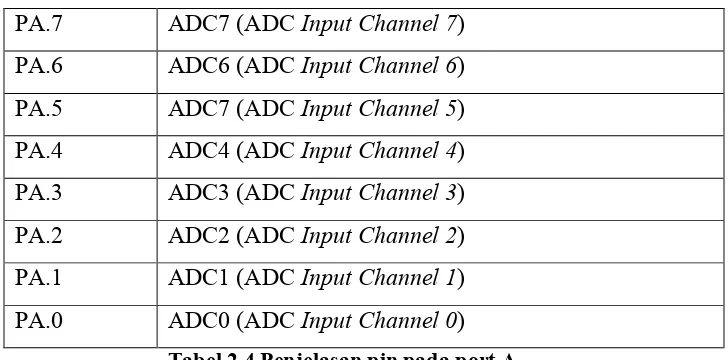
1. Port A
2. Port B
Pin 1 sampai dengan pin 8 merupakan pin dari portB. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register portB (DDRB) harus di-settingterlebih dahulu sebelum port B digunakan. Bit-bitDDRB diisi 0 jika ingin memfungsikan pin-pin portB yang disesuaikan sebagai input, atau diisi 1 jika sebagai output.Selain itu, pin-pin portB juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
PB.7 SCK (SPI Bus Serial Clock)
PB.6 VISO (SPI Bus Master Input/Slave Output) PB.5 VOSI (SPI Bus Master Output/Slave Input) PB.4 SS (SPI Slave Select Input)
PB.3 AIN1 (Analog Comparator Negative Input)OCC (Timer/Counter0 Output Compare Match Output)
PB.2 AIN0 (Analog Comparator Positive Input)INT2 (External Interrupt2 Input)
PB.1 T1 (Timer/Counter1 External Counter Input)
PB.0 T0 (Timer/Counter0 External Counter Input)XCK (JSART External Clock Input/Output)
Tabel 2.5 Penjelasan pin pada port B PA.7 ADC7 (ADC Input Channel 7)
3. Port C
Pin22 sampai dengan pin 29 merupakan pin dari port C. Port C sendiri merupakan port input atau output. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus di-setting terlebih dahulu sebelum port C digunakan. Bit-bitDDRC diisi 0 jika ingin memfungsikan pin-pin portC yang disesuaikan sebagai input, atau diisi 1 jika sebagai output.Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam table :
PC.7 TOSC2 (Timer Oscillator Pin 2) PC.6 TOSC1 (Timer Oscillator Pin 1)
PC.1 SDA (Two-Wire Serial Bus Data Input/Output Line) PC.0 SCL (Two-Wire Serial Bus Clock Line)
Tabel 2.6 Penjelasan pin pada port C
4. Port D
T
Tabel 2.7 Penjelasan pin pada port D
2.2 Optocoupler
Isolator optic (opto-Isolator) atau sering disebut dengan optocoupler adalah rangkaian terpadu yang terdiri dari fototransistor dan LED (Light Emiting Diode)/ kombinasi antara emmiter dan detector. Susunan dari optocoupler diperlihatkan pada gambar 2.8.
Gambar 2.8 Kombinasi emitter dan detector PD.0 RDX (UART input line)
PD.1 TDX (UART output line)
PD.2 INT0 (external interrupt 0 input) PD.3 INT1 (external interrupt 1 input)
PD.4 OC1B (Timer/Counter1 output compareB match output) PD.5 OC1A (Timer/Counter1 output compareA match output) PD.6 ICP (Timer/Counter1 input capture pin)
Penerimaan cahaya inframerah akan membuat transistor peka cahaya menjadi konduksi. Ketika transistor konduksi, keluaranya akan menjadi masukan logika rendah. Jadi keluaran rangkaian transduser akan berlogika rendah ketika transistor konduksi. Pada saat LED tidak konduksi (OFF), LED tidak akan memancarkan cahaya inframerah sehingga transistor juga akan mati. Hal ini akan member keluaran dari transistor berlogika tinggi.
2.3 Rotary Encoder
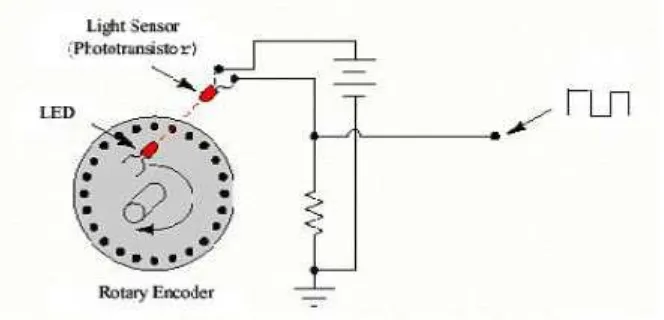
Rotary encoder adalah peralatan elektro-mekanik yang menggunakan sensor optic untuk menghasilkan rentetan pulsa – pulsa yang dapat diubah kedalam suatu gerakan, posisi atau arah. Contoh dari retory encoder dapat dilihat pada gambar 2.10.
Gambar 2.9 Rotary encoder
Pada gambar 2.3.1 menunjukan prinsip kerja secara umum dari rotary encoder, dimana sebuah piringan tipis dan LED yang ditempatkan sedemikian rupa sehingga cahayanya tetap terfokus pada piringan tersebut. Sebuah transistor aktif cahaya ditempatkan pada sisi lain dari piringan sehingga dapat mendeteksi cahaya dari LED.
Gambar 2.11 Prinsip kerja Rotary Encoder
2.4 Absolute Encoder
Absolute Encoder menghasilkan kode digital yang unik/khas untuk masing-masing beda sudut poros. Plat baja dipotong dengan bentuk tertentu kemudian ditempelkan ke piringan/cakram dengan penyekat dimana terpasang kuat dengan poros (shaft). Saat piringan berputar, beberapa kontaknya menyentuh plat baja, dan kontak yang lain tak menyentuh plat (yang berlubang). Plat baja tersebut terhubung dengan sumber arus listrik, dan masing-masing kontak terhubung ke sensor elektrik.
Berikut ini contoh absolut encoder :
Gambar 2.12 Kode binary absolute encoder
Gambar 2.13 Kode gray absolute encoder
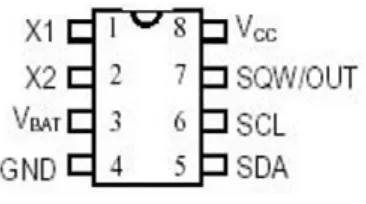
2.5 RTC DS1307
RTC adalah jenis pewaktu yang bekerja berdasarkan waktu yang sebenarnya atau dengan kata lain berdasarkan waktu yang ada pada jam kita. Agar dapat berfungsi, pewaktu ini membutuhkan dua parameter utama yang harus ditentukan, yaitu pada saat mulai (start) dan pada saat berhenti (stop). DS1307 merupakan salah satu tipe IC RTC yang dapat bekerja dalam daya listrik rendah. Di dalamnya berisi waktu jam dan kalender dalam format BCD. Waktu jam dan kalender memberikan informasi detik, menit, jam, hari, tanggal, bulan, dan tahun. Untuk bagian jam dapat berformat 24 jam atau 12 jam. Pendeteksi sumber listrik juga disediakan untuk mendeteksi kegagalan sumber listrik dan langsung mengalihkannya ke sumber baterai.
Gambar 2.16 RTC DS1307
Pin-pin RTC DS1307 beserta penjelasannya adalah sebagai berikut :
4. SCL (Serial Clock Input) – digunakan untuk mensinkronkan perubahan data pada antarmuka serial.
5. SDA (Serial Data Input/Output) – merupakan pin input/output untuk antarmuka serial 2 kawat. Pin SDA membutuhkan resistor pull-up eksternal.
6. SQW/OUT (Square Wave/Output Driver)
2.6 Kompas Digital CMPS03
Karena Sensor Magnetic Compas CMPS03 menggunakan I2C kita dapat menggunakan 5 jalur yaitu :
VCC + 5 V pada pin 1
SCL dengan Pull Up resistor 10 K
SDA dengan Pull Up resistor 10 K
Calibrate pada PIN 6 dihubungkan dengan micro switch
Ground pada PIN 9
Gambar 2.18 Rangkaian aplikasi dari Sensor Magnetic Compas CMPS03
Dengan menggunakan sumber tegangan DC +5 volt dan memiliki komunikasi data berbasis I2C maka sensor kompas CMPS03 ini dapat diaplikasikan dengan baik menggunakan mikrokontroler maupun komputer.
2.7 Display LCD 2x16
Tabel 2.19 Kaki-Kaki LCD 2x16
2.8 Anemometer (Buatan Sendiri)
Anemometer adalah alat pengukur kecepatan anginyang banyak dipakai dalam bidang Meteorologidan Geofisikaatau stasiun prakiraan cuaca.
Gambar 2.20 Anemometer
2.9 Komponen – Komponen Pendukung 2.9.1 Resistor
Resistor adalah komponen elektronik dua kutub yang didesain untuk menahan arus listrik dengan memproduksi tegangan listrik diantara kedua kutubnya, nilai tegangan terhadap resistansi berbanding dengan arus mengalir, berdasarkan hokum ohm. Resistor digunakan sebagai bagian dari jejaring elektronik dan sirkuit elektronik, dan merupakan salah satu komponen yang paling sering digunakan. Resistor dapat dibuat dari bermacam-macam kompon dan film, bahkan kawat resistansi ( kawat yang dibuat dari paduan resistivitas seperti nikel-kromium).
Karakteristik utama dari resistor adalah resistansinya dan daya listrik yang dapat dihantarkan. Karakteristik lain termasuk koefisien suhu, desah listrik,dan induktansi. Resistor dapat di integrasikan kedalam sirkuit hibrida dan papan sirkuit cetak, bahkan sirkuit terpadu. Ukuran dan letak kaki bergantung pada desain sirkuit, kebutuhan daya resistor harus cukup dan disesuaikan dengan kebutuhan arus rangkaian agar tidak terbakar.
Gambar 2.21 Resistor
2.9.2 Kapasitor
lain-mengumpul pada salah satu kaki (elekroda) metalnya dan pada saat yang sama muatan – muatan negative terkumpul pada ujung metal yang satu lagi. Muatan positif tidak dapat menuju ujung kutub negative dan sebaliknya muatan negatif tidak bias menuju ke ujung kutup positif, karena terpisah oleh bahan dielektrik yang non-konduktif. Muatan elektrik ini “tersimpan” selama tidak ada konduksi pada ujung- ujung kakinya. Di alam bebas, phenomena kapasitor ini terjadi pada saat terkumpulnya muatan – muatan positif dan negatif di awan.
Gambar 2.22 Kapasitor
2.9.3 Induktor
Induktor atau reactor adalah sebuah komponen elektronika pasif ( kebanyakan berbentuk torus) yang dapat menyimpan energy pada medan magnet yang ditimbulkan oleh arus listrik yang melintasinya. Kemampuan inductor untuk menyimpan energi magnet ditentukan oleh induksinya, dalam satuan Henry. Biasanya sebuah induktor adalah sebuah kawat penghantar yang dibentuk menjadi kumparan, lilitan membantu membuat medan magnet yang kuat didalam kumparan dikarenakan hokum induksi Faraday. Induktor adalah salah satu komponen elektronik dasar yang digunakan dalam rangkaian yang arus dan tegangannya berubah-ubah dikarenakan kemampuan induktor untuk memproses arus bolak-balik.
Gambar 2.23 Induktor
2.9.4 Dioda
Dioda adalah komponen aktif dua kutub yang pada umumnya bersifat semikonduktor, yang memperbolehkan arus listrik mengalir ke satu arah (kondisi panjar maju) dan menghambat arus dari arah sebaliknya ( kondisi panjar mundur). Dioda dapat disamakan sebagai fungsi katub didalam bidang elektronika. Dioda sebenarnya tidak menunjukkan karakteristik kesearahan yang sempurna, melainkan mempunyai karakteristik hubungan arus dan tegangan kompleks yang tidak linier dan seringkali tergantung pada teknologi atau material yang digunakan serta parameter penggunaan.
2.9.5 Regulator LM317
IC LM317 merupakan chip IC regulator tegangan variable untuk tegangan DC positif. Untuk membuat power supplay dengan tegangan output variable dapat dibuat dengan sederhana apabila menggunakan IC regulator LM317.
Gambar 2.25 Rangkaian Internal LM317
Fungsi bagian pada regulator tegangan positif LM317 :
Voltage Reference adalah jalur atau bagian yang berfungsi memberikan tegangan referensi kontrol tegangan output pada regulator LM317. Input tegangan referensi daiambil dari rangkaian pembagi tegangan variabel (R1 dan R2 pada rangkaian dibawah). Komparator berfungsi sebagai pembanding antar tegangan output dan tegangan referensi,
dimana besarnya tegangan output dapat dihitung dari persamaan dibawah.
Circuit Protection adalah rangkaian pelindung IC LM317 dari terjadinya arus konrsleting dan sebagi pelindung IC dari panan kerlebihan.
2.9.6 Trafo CT Step Down
CT adalah trafo yang menghasilkan arus di skunder dimana besarnya sesuai dengan ratio dan arus primernya. CT umumnya terdiri dari sebuah ini besi yang dililiti oleh konduktor kawat tembaga. Output dari skunder biasanya adalah 1 atau 5 ampere, ini ditunjukan dengan ratio yang dimiliki oleh CT tersebut. Transformator step-down memiliki lilitan skunder lebih sedikit dari pada lilitan primer, sehingga berfungsi sebagai penurun tegangan. Transformator jenis ini sangat mudah ditemui, terutama dalam adaptor AC-DC.
2.9.7 Kabel
BAB III
PERANCANGAN DAN CARA PEMBUATAN ALAT
Secara umum blok diagram pengembangan alat adalah seperti yang ditunjukan pada gambar 3.1. Alat yang dibuat akan membentuk suatu sistem alat pengukuran kecepatan dan penentu arah angin.
Gambar 3.1 Diagram Blok
DISPLAY
µc
BUZZER
Setting Limit
ANEMOMETER
ANEMOMETER
3.1 Pengukuran Kecepatan Angin
Pengukuran kecepatan angin terdiri dari Baling – baling mangkok yang dikompel dengan piringan sensor (absolute encoder), sensor kecepatan optocoupler, mikrokontroller AT – Mega 8535 serta LCD.
3.1.1 Mekanik Pengukuran Kecepatan Angin
Gambar 3.2 Mekanik baling-baling dan piringan sensor
Jika baling – baling berputar 10 rpm v = 10 x 2 πR/menit
Ukuran mangkok > Tenaga > R > Kecepatan tetap sama
Piringan sensor adalah alat yang digunakan untuk mengindera kecepatan putar baling-baling mangkok. Titik pusat piringan sensor dan titik pusat baling-baling-baling-baling magkok dihubungkan dengan sebuah poros, sehingga kecepatan putar piringan sensor sama dengan kecepatan putar baling-baling.
Gambar 3.3 Piringan dikopel dengan baling-baling
3.1.2 Sensor Kecepatan
Penerimaan cahaya inframerah akan membuat transistor peka cahaya menjadi konduksi. Ketika transistor konduksi, keluaranya akan menjadi masukan logika rendah ke Schmitt trigger dan yang digunakan dalam rangkaian adalah komponen 74LS14. Schmitt trigger berfungsi untuk membersihkan sinyal. Jadi keluaran rangkaian transducer akan berlogika rendah ketika transistor konduksi.
Gambar 3.5 Optocoupler
Pada saat LED tidak konduksi (off), LED tidak akan memancarkan cahaya infra merah sehingga transistor juga akan mati. Hal ini akan memberikan masukan logika tinggi ke Schmitt trigger. Dalam keadaan baling-baling mangkok berputar, rangkaian sensor kecepatan akan memberikan keluaran dalam bentuk gelombang kotak dengan 30 pulsa tiap putaran baling-baling 3.1.3 Schmitt Trigger
IC ini berfungsi menegaskan output optocoupler (LED dan phototransistor), ketika berubah dari low ke high bila kurang dari nilai Positif Going Threshold Voltage (PGTV) maka output akan dibawa ke logika low dan sebaliknya bila lebih dari nilai PGTV maka output akan dibawa ke logika high. Ketika berubah dari high ke low bila lebih dari nilai Negative Going Threshold Voltage (NGTV) maka output akan dibawa ke logika high dan sebaliknya bila kurang dari nilai NGTV, maka output akan dibawa ke logika low.
3.1.4 Mikrokontroller AT-Mega 8535 Untuk Kecepatan Angin
menampilkan data hasil perhitungan sehingga tidak diperlukan pengali maka dibuat metode pengambilan data persatuan waktu yang khusus. Diambil contoh untuk kecepatan angin 3 KM/Jam, metodenya sebagai berikut :
3 KM/Jam = 1 rps
karena digunakan 30 slot maka dalam 1 rps = 30 slot = 3 KM/Jam
sehingga setiap 1 pulsa akan sama dengan 0,1 KM/Jam
3.2 Penentu Arah Angin
Penentu arah angin ini terdiri atas 4 macam piranti, yaitu sirip penunjuk arah angin, sensor rotary encoder, sensor kompas digital dan mikrokontroller AT-Mega 8535 serta LCD untuk menampilkan hasilnya.
Gambar 3.6 Arah Angin
3.2.1 Mekanik Penentu Arah Angin
yang terlihat pada Gambar 3.7. Sirip ini berfungsi untuk memutar sensor rotary encoder untuk menunjukan arah angin sesuai dengan arah datangnya angin.
Gambar 3.7 Mekanik Penunjuk arah angin
Seperti terlihat pada Gambar 3.7, mekanik arah angin mempunyai poros vertikal A. Ekor angin C mempunyai daya tangkap angin yang lebih besar dari ujung mekanik B. Dengan demikian, maka dari manapun angin datang bertiup, ujung mekanik B senantiasa mengambil kedudukan menuju ke arah dari mana datangnya angin.
3.2.2 Sensor Rotary encoder
Prinsip kerja dari sensor ini yaitu dengan menghubungkan poros (shaft) pada sebuah piringan sensor. Dimana piringan sensor ini terdiri dari beberapa jalur (track) yang berupa lingkaran-lingkaran yang konsentris dan setiap jalur di hubungkan dengan sebuah sumber cahaya dan detector cahaya.
Sumber cahaya ini berfungsi untuk mengubah energy listrik menjadi cahaya, dan cahaya ini akan mengkonduksikan detektor cahaya jika mengenai bagian yang transparan dari piringan tersebut. Sehingga, keluaran dari detektor cahaya akan berlogika rendah. Dimana fungsi dari detektor cahaya untuk mengubah energi cahaya menjadi energi listrik. Sehingga,masing-masing jalur (track) dapat diketahui MSB (Most Significant Bit) dan LSB (low Significant Bit) pada outputnya yang berupa bilangan biner yang menyusun sebuah sandi BCD.
Sensor ini mempunyai keluaran 11 bit yang dihubungkan ke mikrokontroller. Pada Aplikasinya sebagai penentu arah angin sensor rotary encoder yang digunakan mempunyai ketelitian sampai 0.5 derajat, hal ini disebabkan karena sensor ini mempunyai pulse/1 putaran sebesar 720 division.
Gambar 3.9 Control output NPN open colector
3.2.3 Mikrokontroller AT- Mega8535 untuk Arah Angin
Mikrokontroller AT-Mega 8535 berfungsi untuk mengolah data yang inputnya berasal dari sensor rotary encoder dan hasilnya akan ditampilkan pada LCD. Rancangan pemograman dari mikrokontroller untuk penentu arah angin ini terbagi menjadi dua bagian yaitu tampilan untuk nilai default dan tampilan untuk nilai setting. Tampilan untuk nilai default ini digunakan pada saat alat pertama kali dijalankan, dengan catatan bahwa tombol set tidak ditekan. Jika sewaktu-waktu diinginkan pengesetan arah angin, maka tombol 5 set ditekan setelah mengatur arah angin sesuai keinginan.
berupa data biner. Sebagai contoh jika modul menghadap utara maka data yang dihasilkan adalah data 00H, dan arah selatan data keluarannya adalah 7FH.
Koneksi dari modul ke mikrokontroller dapat dilakukan dengan 2 cara yaitu dengan mengunakan data PWM (Pulse Width Modulation), atau dengan I2C (Inter Intergrated Circuit).Jika menggunakan interface PWM, pulsa keluaran memiliki rentang 1mS untuk 0° atau arah utara sampai dengan 36.99 mS untuk 359.90°. Cara yang kedua mengunakan I2C, metode ini dapat digunakan langsung sehingga data yang dibaca tepat 0° – 360° sama dengan 0 – 255.
3.3 Flowchart
Gambar 3.11 Flowchart
ANEMOMETER
Kompas Digital
Kecepatan Angin
BAB IV
PENGUJIAN ALAT DAN ANALISIS
Pengujian pada sistem perangkat keras dan perangkat lunak yang telah direalisasikan ini dilakukan untuk mengetahui apakah sistem tersebut dapat bekerja sesuai dengan teori-teori yang ada atau tidak, serta untuk mengetahui seberapa besar kesalahan hasil pembacaan perangkat keras yang dibuat yaitu dengan cara melakukan kalibrasi dengan anemometer (alat ukur kecepatan angin) yang ada. Pengujian sistem ini dilakukan pada masing-masing bagian, yaitu dengan membandingkan hasil pengukuran alat dengan alat ukur yang ada di Badan Metereologi dan Geofisika (BMKG) Padang Panjang (Sumatera Barat). Pengukuran yang dilakukan terbagi manjadi 2 bagian yaitu pengukuran untuk kecepatan angin dan pengukuran untuk penentu arah angin
4.1. Pengujian Alat Ukur Kecepatan angin
Tabel 4.1 Data Pengukuran Kecepatan Angin Di Bandara
Tanggal Bandara (Minangkabau Padang)
" Data dari alat Data BMKG
" Kecepatan Arah angin Kecepatan Arah angin Sabtu 7.2 km/jam : 225˚ 7.2 km/jam: 227˚ 15 Juni
2013 2 m/s Barat Daya 2 m/s Barat Daya
Minggu 14.4 km/jam : 247˚ 15 km/jam : 250˚ 16 Juni
2013 4 m/s Barat Daya 4.1 m/s Barat Daya
Senin 7.2 km/jam : 255˚ 7.5 km/jam : 257˚ 17 Juni
2013 2 m/s Barat Daya 2.1 m/s Barat Daya
Tabel 4.2 Data Pengukuran Kecepatan Angin Di Pelabuhan Belawan
Tanggal Daerah Pelabuhan Belawan
" Data dari alat Data BMKG
" Kecepatan Arah angin Kecepatan Arah angin
Sabtu 54 km/jam : 325˚
53.6
km/jam : 327˚ 25 Mei
2013 15 m/s Barat Laut 14.9 m/s Barat Laut
Senin 57.6 km/jam : 317˚
57.9
km/jam : 320˚ 27 Mei
2013 16 m/s Barat Laut 16.1 m/s Barat Laut
Selasa 61.2 km/jam : 325˚ 60 km/jam : 327˚ 28 Mei
Tabel 4.3 Data Pengukuran Kecepatan Angin Di Daratan Binjai
Tanggal Daerah Daratan Binjai
" Data dari alat Data BMKG
" Kecepatan Arah angin Kecepatan Arah angin
Senin 18 km/jam : 80˚
18.3
km/jam : 83˚ 17 Juni
2013 5 m/s Timur 5.1 m/s Timur
Rabu 39.6 km/jam : 85˚ 40 km/jam : 85˚
19 Juni
2013 11 m/s Timur 11.1 m/s Timur
Kamis 43.2 km/jam : 87˚ 44 km/jam : 88˚
20 Juni
2013 12 m/s Timur 12.2 m/s Timur
Untuk mengetahui seberapa besar kesalahan pembacaan alat ukur yang dibuat terhadap alat ukur pembanding, maka dapat dibuat Tabel perhitungan-perhitungan berdasarkan Tabel 4.3.
Tabel 4.4 Perhitungan Simpangan Kecepatan Angin
No.
15 km/jam 14.4 km/jam -0.6 0.36
7.5 km/jam 7.2 km/jam -0.3 0.09
2 53.6 km/jam 54 km/jam 0.4 0.16
57.9 km/jam 57.6 km/jam -0.3 0.09
60 km/jam 61 km/jam 1.2 1.44
3 18.3 km/jam 18 km/jam -0.3 0.09
40 km/jam 39.6 km/jam -0.4 0.16
44 km/jam 43.2 km/jam -0.8 0.64
Tabel 4.5 Perhitungan Kesalahan Rata – Rata Kecepatan Angin
Jadi harga kesalahan rata-rata pengukuran kecepatan angin adalah sebesar 9.73 % dengan harga toleransinya adalah sebesar 30.8%, dengan
Dari pengukuran kecepatan angin yang dilakukan di Masing-masing tempat dapat dilihat bahwa terdapat perbedaan antara alat ukur kecepatan angin yang saya buat dengan alat ukur kecepatan angin pembanding. Hal ini disebabkan karena pada alat ukur pembanding skala pembacaannya dilakukan secara digital dengan satuan km/jam sedangkan alat ukur yang saya rancang skala pembacaannya dilakukan secara analog dengan satuan m/s sehingga pada kedua alat terdapat perbedaan satuan dan ketelitian hasil pembacaan yang dapat mengakibatkan kesalahan hasil pengamatan pada waktu pengukuran.
PERHITUNGAN :
Km/jam ke m/s sebagai berikut : Dimana : 1 km = 1000 m
1 jam = 3600 s
1 km/jam = 1000m/3600s
Jadi apabila 10 km/jam = (10 x 1000)m/ 3600s = 10000m/3600s = 2.7m/s
Sedangkan perhitungan m/s ke km/jam sebagai berikut : Dimana : 1 km = 1000m
1/1000 km = 1 m
Jadi apabila 10 m/s = 10 x (1/1000)km / (1/3600) Jam = 10 x 3600/1000 km/jam
4.2 Pengujian Alat Ukur Penentu Arah Angin
Pengujian alat pengukur arah angin dilakukan untuk mengetahui apakah alat pengukur arah angin yang dibuat dapat mengukur hingga 3600 dalam satu putarannya atau tidak dan untuk menguji seberapa tinggi ketelitian alat ukur tersebut, serta membandingkannya dengan penentu arah angin yang ada di BMKG Padang Panjang (Sumatera Barat) dan BMKG Belawan, pengujian dilakukan dengan cara mengarahkan mekanik alat yang dibuat dan mekanik alat dari BMG ke arah utara yang menandakan bahwa.
Tabel 4.6 Hasil Pengujian Alat Ukur Arah Angin
No. Tempat Alat Ukur Pembanding Alat Tugas Akhir
1 Binjai 83˚( Arah Timur) 80˚( Arah Timur)
Binjai 85˚( Arah Timur) 85˚( Arah Timur) Binjai 88˚(Arah Timur) 87˚( Arah Timur) 2 Padang 227˚(Arah Barat Daya) 225˚( Arah Barat Daya)
Padang 250˚(Arah Barat Daya) 247˚( Arah Barat Daya) Padang 257˚( Arah Barat Daya) 255˚( Arah Barat Daya) 3 Belawan 327˚( Arah Barat Laut) 325˚( Arah Barat Laut)
Belawan 320˚( Arah Barat Laut) 317˚( Arah Barat Laut) Belawan 327˚( Arah Barat Laut) 325˚( Arah Barat Laut)
Tabel 4.7 Perhitungan Simpangan Arah Angin
e = 0.7/ 255˚ x 100%
Tabel 4.8 Perhitungan Kesalahan Rata – Rata Penentu Arah Angin
Jadi harga kesalahan rata-rata pengukuran kecepatan angin adalah sebesar 3.92 % dengan harga toleransinya adalah sebesar 31.37%, dengan
Ketepatan = 100% - 3.92% = 96.08 %
Hasil pengukuran arah angin yang diperoleh dapat dilihat bahwa alat yang dibuat mampu menentukan arah angin hingga 360. Meskipun terdapat perbedaan hasil pengukuran antara alat ukur tugas akhir dengan alat ukur pembanding, namun perbedaan ini tidak terlalu jauh. Hal ini disebabkan oleh beberapa faktor diantaranya yaitu:
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil percobaan yang dilakukan dapat disimpulkan sebagai berikut :
1. Sensor kecepatan berupa rangkaian elektronik yang terdiri dari optocoupler dan schmitt trigger yang menghasilkan frekuensi keluaran yang sebanding dengan kecepatan mekanik baling-baling mangkok.
2. Pengukuran kecepatan angin dilakukan pada angin yang bergerak mendatar dengan kecepatan minimal yang dapat diukur adalah 0,1 m/s.
3. Dari hasil perhitungan untuk kecepatan angin diperoleh error 9.72% dan untuk pengukuran arah angin sebesar 3.92%.
4. Dari hasil perhitungan yang dilakukan, alat penentu kecepatan dan arah angin Skripsi ini mempunyai kesalahan rata-rata yang cukup rendah yaitu sebesar 1.06 % untuk Kecepatan angin terhadap data yang di keluarkan BMKG dan sebesar 0.4% untuk Arah angin.
5.2 Saran
1. Diharapkan fungsi alat bisa diperluas lagi, agar tidak hanya bisa mengukur kecepatan dan arah angin saja. Tapi bisa diperluas dengan menambahkan fungsi lain seperti pengukur suhu, pengukur tekanan bahkan mengukur kelembaban udara.
2. Diharapkan alat skripsi yang saya rancang ini dapat dipergunakan untuk keperluan percobaan sekolah atau percobaan di Laboratorium.
DAFTAR PUSTAKA
Bejo,Agus,2005, “C & AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroller AT Mega 8535”,Edisi Pertama,Penerbit Gava Media,Yogyakarta.
Budiharto,Widodo,2005, “Panduan Lengkap Belajar Mikrokontroller Perancangan Sistem dan Aplikasi Mikrokontroller”,Penerbit:PT.Elex Media Komputindo,Jakarta.
Heryanto,M.Ary dan Wisnu Adi,2008, “Pemrograman Untuk Mikrokontroller AT Mega 8535”,ANDI,Yogyakarta.
Malvino,Albert Paul,2003, “Prinsip-Prinsip Elektronika”,Jilid 1 dan 2,Edisi Pertama,Penerbit:Salemba Teknika,Jakarta.
Syahrul,2012, “Mikrokontroller AVR AT Mega 8535”,Informatika,Bandung. http://www.mikro.com/en/books/keu/05.htmlDiakses tanggal 19 June 2013
http://www.tofi.or.id/download/PIRANTI%20SEMIKONDUKTOR_4.ppt. Diakses tanggal 19 June 2013