1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Penggilingan obat berjenis tablet untuk pembuatan puyer yang dikerjakan di laboratorium masih dikerjakan secara manual oleh apoteker, sehingga tidak menutup kemungkinan pasti akan terjadinya suatu kesalahan saat memberi takaran komposisi dikarenakan manusia mempunyai keterbatasan dalam kesehatan yang ada sehingga berdampak kurang teliti dalam memberi takaran pada saat penakaran obat.
Rancang bangun alat ini menggunakan sensor Load Cell, motor DC, Keypad 4x4, motor servo, serta LCD 2x16. Sensor Load Cell digunakan sebagai sensor baban dimana untuk menghitung berat dari obat, beban terhitung akan ditampilkan pada LCD (Liquid Crystal Display), setelah berat obat terhitung kemudian obat yang berada di atas timbangan tersebut didorong ke dalam tempat penggilingan.
Sejalan dengan perkembangan teknologi, dimana semua dapat dilakukan dengan menggunakan kecanggihan teknologi. Pada proyek ini peralatan penggilingan obat akan diterapkan konsep otomatisasi pada penimbangan berat obat, serta penghancuran atau penggilingan obat yang sebelumnya berbentuk tablet. Alat atau sistem yang dibuat ini dinamakan “ Rancang Bangun Alat Penggiling Obat Secara Otomatis ”. dengan alat ini diharapkan dapat membantu kinerja apoteker dalam proses pembuatan puyer atau obat sejenisnya. Dengan demikian hemat waktu dan tenaga.
1.2 Perumusan Masalah
Permasalahan dari rancangan ini terletak pada wajan yang digunakan untuk menampung obat yang telah digiling serta mekanik penggilingan. Permasalahan yang ditangani ini,yaitu :
2. Mendeteksi perbedaan obat yang sebelum digiling dan sesudah digiling. 3. Hasil dari penggilingan obat dapat dilihat dari indikator pada LCD.
1.3 Maksud dan Tujuan
Adapun maksud dari tugas akhir ini adalah :
- Merancang sebuah sistem peralatan penggiling obat secara otomatis yang dapat digunakan dalam membantu kinerja dari Apoteker.
- Meningkatkan ketelitian dalam hal penakaran obat . Sedangkan tujuan dari pembuatan tugas akhir ini adalah :
- Memudahkan pengerjaan pada penggilingan obat berupa tablet secara otomatis.
- Meningkatkan hasil produksi dibandingkan dengan pengerjaan secara manual.
1.4 Batasan Masalah
Karena banyaknya kajian yang akan dibahas, maka pada perancangan yang akan dibuat ini terdapat beberapa batasan masalah agar lebih terfokus pada perumusan masalah, diantaranya :
- Mengendalikan perangkat dengan menggunakan mikrokontroller sebagai kendali.
- Obat yang digunakan adalah obat berupa tablet, studi kasus obat tablet antibiotic.
- Ukuran obat yang akan digiling berukuran sedang.
- Menempatkan atau memindahkan obat hasil gilingan secara manual ( tanpa konveyor) pada posisi keluarnya tablet yang sudah digiling.
1.5 Metode penelitian
1. Studi Pustaka
Studi pustaka dilakukan untuk mendapatkan landasan teori, data-data, dan informasi sebagai bahan acuan dalam melakukan perencanaan, percobaan, pembuatan, analisis dan penyusunan tugas akhir.
2. Perancangan dan Realisasi
Perancangan dimaksudkan untuk memperoleh desain suatu program aplikasi yang baik yang kemudian akan direalisasikan kepada alat yang akan dibuat.
3. Pengujian
Tahap pengujian ini dilakukan agar hasil dari alat yang telah dibuat dapat sesuai dengan apa yang telah direncanakan.
1.6 Sistematika Penulisan
Sistematika penulisan laporan tugas akhir ini sebagai berikut: BAB I : PENDAHULUAN
Berisi tentang latar belakang masalah, maksud dan tujuan, batasan masalah serta metode penelitian.
BAB II : LANDASAN TEORI
Berisi tentang pembahasan Arduino, komunikasi Arduino dengan sensor Load Cell, motor DC, Motor servo dan LCD.
BAB III : PERANCANGAN SISTEM
Berisi tentang perancangan sistem yang dibuat, meliputi garis besar sistem, perancangan perangkat lunak untuk mengontrol perangat keras, komunikasi perangkat lunak dengan perangkat keras dan perangkat keras secara keseluruhan.
BAB IV : PENGUJIAN DAN ANALISA SISTEM
BAB V : KESIMPULAN DAN SARAN
5
BAB II
DASAR TEORI
2.1 Sistem Kendali
Sistem Kendali atau control system terdiri dari dua kata yaitu system dan control. System berasal dari Bahasa Latin (systema) dan bahasa Yunani (sustema)
adalah suatu kesatuan yang terdiri dari komponen atau elemen yang dihubungkan bersama untuk mencapai suatu tujuan tertentu. Control itu memiliki arti mengatur, mengarah dan mengendalikan. Jadi system control adalah hubungan antara komponen-komponen fisik yang membentuk suatu konfigurasi sistem sehingga memberikan hasil yang diharapkan yang dapat dipraktekkan secara otomatis. Pengontrolan atau pengendalian perangkat menggunakan Inoduino Board dimana Inoduino Board ini mengontrol atau mengendalikan seluruh perangkat, misal motor Servo, motor DC, Liquid Crystal Display 16x2 (LCD) serta sensor Load Cell.
2.1.1 Jenis-Jenis Sistem Kendali
Jenis-jenis sistem kendali terdiri dari 2 macam yaitu sistem open loop dan close loop.
2.1.1.1 Sistem Open Loop
Sistem kendali open loop adalah sebuah sistem yang tidak memiliki umpan balik (feedback), sehingga bila terdapat gangguan dari dalam maupun dari luar maka sistem tidak dapat melaksanakan tugas seperti yang diharapkan. Suatu sinyal masukan diberikan ke dalam sistem kendali dimana keluarannya bertindak sebagai sinyal penggerak dimana sinyal penggerak ini yang kemudian menghasilkan proses yang akan dikendalikan untuk menghasilkan output yang diinginkan. Proses open loop dapat dilihat pada gambar 2.1.
2.1.1.2 Sistem Close Loop
Sistem kendali close loop adalah sistem kontrol yang memiliki feedback, berbeda dengan sistem open loop. Pada bagian output dari sistem kontrol ini akan dikirim kembali untuk dibandingkan dengan input yang diberikan. Bila masih terdapat selisih antara output dan input, maka sistem masih memiliki error . Error merupakan selisih antara input dan output atau sistem belum mencapai hasil yang diinginkan. Proses kerja dari sistem close loop dapat dilihat pada gambar 2.2.
Gambar 2.2 Sistem Close Loop 2.2 Perangkat Keras
2.2.1 Mikrokontroler
Mikrokontroler merupakan rangkaian terintegrasi yang berisi komponen-komponen yang diperlukan oleh sebuah komputer seperti CPU, I/O, jalur komunikasi, memori, timer dan lain sebagainya. Mikrokontroler dapat diberi sebuah program yang bekerja sesuai dengan keinginan pengguna dan dapat dihapus dengan cara khusus. [1]
Beberapa fitur yang terdapat pada mikrokontroller : 1. CPU (Central Procesing Unit)
CPU adalah suatu unit pengolahan pusat yang terdiri dari 2 bagian, yakni unit pengendali (Control Unit) dan logika (Arithmetic Logic Unit). Disamping itu, CPU mempunyai beberapa simpanan yang berukuran kecil yang disebut dengan register.
2. Bus Alamat
Bus alamat berfungsi sebagai jumlah lintasan saluran pengalamatan. Pengalamatan ini harus ditentukan terlebih dahulu untuk menghindari terjadinya kesalahan pengiriman sebuah intruksi dan terjadinya tabrakan antara dua buah alat yang bekerja secara bersamaan. 3. Bus Data
Bus data merupakan lintasan saluran keluaran masuknya data dalam suatu mikrokontroler. Umumnya saluran data yang masuk sama dengan saluran data yang keluar.
4. Bus control
Bus control atau bus kendali berfungsi untuk mengintegrasi operasi mikrokontroler dengan operasi rangkaian luar.
5. Memori
Memori berfungsi untuk menyimpan data atau program. Ada beberapa jenis memori, diantaranya adalah ROM (Read Only Memory) dan RAM (Random Access Memory) serta berdasarkan tingkatannya, memori terbagi menjadi register internal, memori utama dan memori masal. Register internal adalah memori yang terdapat di dalam ALU (Arithmatic Logic Unit). Memori utama adalah memori yang ada pada suatu sistem, waktu aksesnya lebih lambat dibandingkan dengan register internal. Sedangkan memori masal yang dipakai untuk menyimpan daya yang berkapasitas tinggi, yang biasanya berbentuk disket, pita magnetik atau kaset.
6. RAM
catu daya. Karena bersifat yang demikian, RAM hanya digunakan untuk menyimpan data pada saat program bekerja.
7. ROM
ROM merupakan memori yang hanya dapat dibaca, dimana isinya tidak dapat dirubah apabila IC telah kehilangan catu daya. ROM dipakai untuk menyimpan program, pada saat direset maka mikrokontroler akan langsung bekerja dengan program yang terdapat di dalam ROM tersebut. Ada berbagai jenis ROM antara lain ROM murni, PROM (Programmable Read Only Memory), yang paling banyak digunakan diantara jenis-jenis
diatas adalah EPROM yang dapat diprogram ulang dan dapat juga dihapus dengan sinar ultraviolet.
8. Perangkat Input/Output
Perangkat input dan output mikrokontroler adalah suatu peranti yang menghubungkan proses didalam mikrokontroler dengan dunia luar (rangkaian lain), peranti ini dibutuhkan sebagai media komunikasi dengan perangkat lain atau peubah tipe sinyal. Contoh perangkat I/O antara lain:
1. USART (Universal Synchronous Asynchronous Receiver Transmitter) merupakan adapter yang digunakan sebagai komunikasi
serial sinkron dan asinkron.
2. SPI (Serial Peripheral Interface) merupakan port komunikasi serial sinkron.
3. I2C bus (Inter-Itergrated Circuit Bus) merupakan antarmuka serial bus yang dikembangkan oleh philihps.
4. Analog to Digital Conversion (ADC) adalah rangkaian yang digunakan untuk mengubah data analog ke data digital.
5. Digital to Analog(DAC) adalah rangkaian untuk mengubah data
digital ke data analog.
6. Analog Comparator adalah rangkaian komparator tegangan, saat ini peranti ini telah terintegrasi dalam port mikrokontroller.
9. Clock
Clock atau pewaktu berfungsi memberikan referensi waktu dan
sinkronisasi antar elemen.
Inoduino Board merupakan sebuah modul mikrokontroler singlechip
berbasis mikrokontroler AT90USB1286 yang kompatibel dengan Arduino. berikut spesifikasi Inoduino Board :
1. Berbasis mikrokontroller AT90USB1296 dengan flash memory sebesar 124 KB (total 128 KB, 4 KB telah digunakan untuk bootloader) dan EEPROM 4 KB.
2. Dilengkapi dengan program bootloader yang dapat diprogram menggunakan software Arduino.
3. Memiliki 39 jalur input/ output + 8 channel ADC 10 bit.
4. Tersedia jalur komunikasi serial USB, sekaligus sebagai jalur untuk pemrograman mikrokontroler.
5. Frekuensi osilator sebesar 16 MHz. 6. Tersedia rangkaian reset manual.
7. Tersedia tombol HWB untuk masuk ke dalam mode bootloader.
8. Dilengkapi dengan regulator 3.3 Volt dan 5 Volt dengan arus maksimum 800 mA.
9. Membutuhkan catu daya input : 6.5 s/d 12 VDC.
2.3 Jenis-Jenis Motor
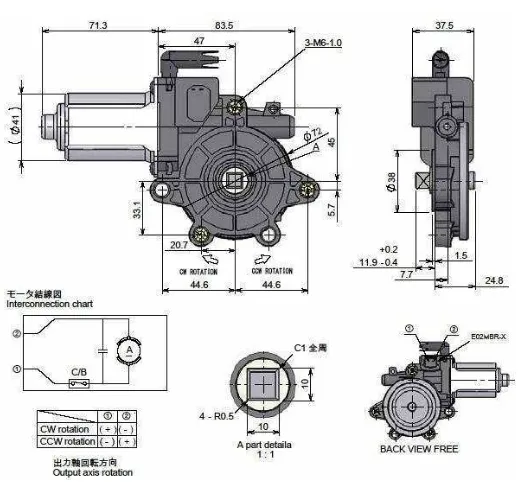
2.3.1 Motor DC (Power Window)
Motor DC (Power Window) adalah suatu motor yang mengubah energi listrik searah menjadi mekanis yang berupa tenaga penggerak torsi. Motor DC digunakan dimana kontrol kecepatan dan kecepatan torsi diperlukan untuk memenuhi kebutuhan. Bagian DC yang paling penting adalah rotor dan strator. Bagian stator adalah badan motor, sikat-sikat dan inti kutub magnet. Bagian rotor adalah bagian yang berputar dari suatu motor DC. Yang termasuk rotor ialah lilitan jangkar, komutator, tali, isolator, poros, bantalan dan kipas. Jenis motor dc yang dipergunakan dapat dilihat pada gambar dibawah ini. [5]
Gambar 2.5 Dasar Power Window
Motor power window banyak dipergunakan karena torsi tinggi dengan rating tegangan input yang rendah yaitu 12 VDC dan dimensi motor yang relatif sederhana dilengkapi dengan interval gearbox sehingga memudahkan untuk instalasi mekanik. Prinsip kerja motor DC power window mempunyai bagian stator yang berupa magnet permanen dan bagian yang bergerak rotor yang berupa
koil atau gulungan kawat tembaga. Dimana setiap ujungnya tersambung dengan komutator ini dihubungkan dengan kutub positive (+) dan kutub negative (-) dari catu daya.
Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor dc paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen. Catu tegangan dc dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang terhubung dengan dua ujung lilitan pada gambar 2.3 disebut Angker dynamo. Angker dynamo adalah sebutan untuk komponen yang berputar di antara medan magnet. Motor DC memiliki 2 bagian dasar :
1. Bagian yang tetap atau stasioner yang disebut stator. stator ini menghasilkan medan magnet baik yang dibangkitkan dari sebuah koil (elektro magnet) ataupun magnet permanen.
2. Bagian yang berputar disebut rotor. Rotor ini berupa sebuah koil dimana arus listrik mengalir.
Gaya elektromagnetik pada motor DC timbul saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh magnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada penghantar yang terletak dalam medan magnet
Karena putaran rotor, arus listrik di dalam kawat akan berjalan bolak-balik karena jalannya sesuai dengan medan magnet, maka rotor akan selalu berputar terus menerus selama arus listrik tetap mengalir di dalam kawat. Untuk karakteristik pada motor dc antara lain:
1. Kutub Medan Secara langsung sederhana digambarkan bahwa interaksi dua kutub magnet akan menyebabkan perputaran pada motor dc. Motor DC memiliki kutub medan yang stasioner dan dynamo yang menggerakkan bearing pada ruang diantara kutub medan. Motor DC sederhana memiliki dua kutub medan yaitu utara dan selatan. Garis magneticenergy membesar melintasi bukan di antara kutub-kutub dari
utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau lebih electromagnet. Electromagnet menerima listrik dari sumber daya dari luar sebagai penyedia struktur medan.
2. Dynamo Bila arus masuk menuju dynamo, maka arus ini akan menjadi electromagnet. Dynamo yang terbentuk silinder, dihubungkan ke as
penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dynamo berputar dalam medan magnet yang terbentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi. Jika hal ini terjadi, arusnya berbalik untuk merubah kutub-kutub utara dan selatan dynamo.
3. Commutator Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk membalikan arah arus listrik dalam dynamo. Commutator juga membantu dalam transmisi arus antara
dynamo dan sumber daya. Keuntungan utama motor DC adalah
sebagai pengendali kecepatan yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur tegangan dynamo (meningkatkan tegangan dynamo yang dimana akan
2.3.2 Motor Stepper
Motor stepper adalah perangkat elektromekanis yang bekerja dengan mengubah pulsa elektronis menjadi gerakan mekanis diskrit. Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik. Penggunaan motor stepper memiliki beberapa keunggulan dibandingkan dengan penggunaan motor DC biasa. Keunggulannya antara lain adalah :
1. Sudut rotasi motor proposional dengan pulsa masukan sehingga lebih mudah diatur.
2. Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak.
3. Posisi dan pergerakan repetisinya dapat ditentukan secara presisi. 4. Memiliki respon yang sangat baik terhadap mulai, berhenti dan
berbalik (perputaran).
5. Sangat relibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada motor DC.
6. Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel langsung ke porosnya.
7. Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range luas.
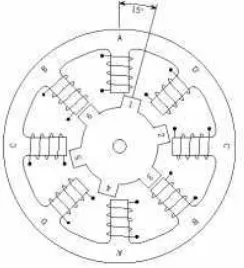
Pada dasarnya terdapat 3 tipe motor stepper yaitu : 1. Motor stepper tipe variable reluctance (VR)
Gambar 2.7 Penampang Melintang Dari Motor Stepper tipe VR
2. Motor stepper tipe Permanent Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar (tin can) yang terdiri atas lapisan magnet permanen yang diselang-seling dengan kutub yang berlawanan (perhatikan gambar 2.8). Dengan adanya magnet permanen, maka intensitas fluks magnet dalam motor ini akan meningkat sehingga dapat menghasilkan torsi yang lebih besar. Motor jenis ini biasanya memiliki resolusi langkah (step) yang rendah yaitu antara 7,50 hingga 150 per langkah atau 48 hingga 24 langkah setiap putarannya. Berikut ini adalah ilustrasi sederhana dari motor stepper tipe permanent magnet:
Gambar 2.8 Ilustrasi Motor Stepper tipe PM
3. Motor stepper tipe Hybrid (HB)
magnet permanen yang tersusun secara aksial pada batang porosnya seperti motor tipe PM. Motor tipe ini paling banyak digunakan dalam berbagai aplikasi karena kinerja lebih baik. Motor tipe hibrid dapat menghasilkan resolusi langkah yang tinggi yaitu antara 3,60 hingga 0,90 per langkah atau 100-400 langkah setiap putarannya. Berikut ini adalah penampang melintang dari motor stepper tipe hibrid:
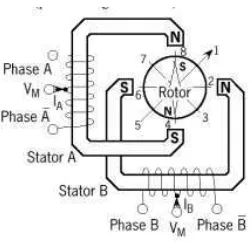
Gambar 2.9 Penampang Melintang Motor Stepper tipe hybrid Berdasarkan metode perancangan rangkain pengendalinya, motor stepper dapat dibagi menjadi jenis unipolar dan bipolar. Rangkaian pengendali motor stepper unipolar lebih mudah dirancang karena hanya memerlukan satu switch
atau transistor setiap lilitannya. Untuk menjalankan dan menghentikan motor ini cukup dengan menerapkan pulsa digital yang hanya terdiri atas tegangan positif dan nol (ground) pada salah satu terminal lilitan (wound) motor sementara terminal lainnya dicatu dengan tegangan positif konstan (VM) pada bagian tengah (center tap) dari lilitan.
Gambar 2.10 Motor Stepper Dengan Lilitan Unipolar
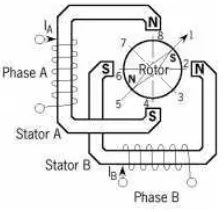
negatif dan sebaliknya (perhatikan gambar 2.11). Karena itu dibutuhkan rangkaian pengendali yang agak lebih kompleks daripada rangkaian pengendali untuk motor unipolar. Motor stepper bipolar memiliki keunggulan dibandingkan dengan motor stepper unipolar dalam hal torsi yang lebih besar untuk ukuran yang sama.
Gambar 2.11 Motor Stepper Dengan Lilitan Bipolar 2.3.2.1 Pengendali Motor Stepper
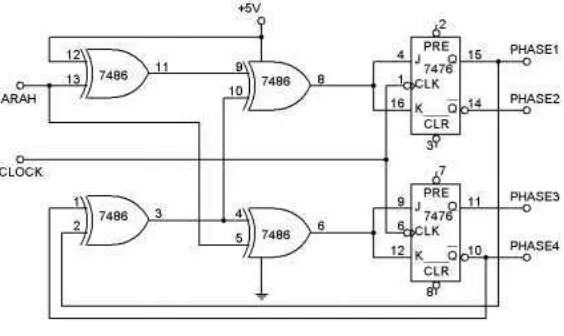
Berikut ini akan diberikan contoh perancangan dan perhitungan rangkaian pengendali motor stepper sederhana. Motor stepper yang digunakan pada contoh ini dengan tipe hibrid unipolar, memiliki empat fasa dan panjang langkah sebesar 1,80 per langkah. Motor diharapkan dapat berputar dalam dua arah dan memiliki dua kecepatan. Karena itu diperlukan pengendali motor stepper yang memiliki empat keluaran pulsa dengan kemampuan dua arah perputaran dan dua macam frekuensi pulsa guna mengatur kecepatan motor.
Rangkaian pengendali motor stepper (stepper motor driver) menggunakan komponen utama berupa sebuah IC logika XOR (74LS86) dan sebuah IC JK flip-flop (74LS76). Rangkain dengan kedua IC tersebut berfungsi untuk menghasilkan
empat pulsa keluaran berurutan yang dapat berbalik urutannya dengan menerapkan logika tertentu pada rangkaian. Rangkaian tersebut memerlukan pulsa clock untuk dapat beroperasi. Sebagai sumber clock digunakan rangkaian berbasis
Gambar 2.12 Skema Rangkaian Pengendali Motor Stepper
Pada Gambar 2.12 adalah skema rangkaian pengendali motor stepper yang dapat bergerak ke dua arah. Keluaran pengendali motor stepper ini ada empat (pin15, 14, 11, 10 dari IC 74LS76). Pin-pin tersebut akan menghasilkan pulsa yang dapat menggerakkan motor stepper. Berikut ini adalah ilustrasi struktur motor stepper sederhana dan pulsa yang dibutuhkan untuk menggerakkannya.[6]
Gambar 2.13 Bentuk Pulsa Keluaran Dan Penerapan Pulsa Pengendali Motor
Arah putaran motor dapat diatur dengan mengatur kondisi logika masukan pada pin EN (Enable, EN 1.2, EN 3.4) dari IC L293D. Jika diterapkan logika 0, maka motor akan berputar berlawanan dengan arah jarum jam (counter clock wise) sedangkan jika diterapkan logika 1, maka motor akan berputar dengan arah
2.3.3 Motor Servo
Motor Servo adalah sebuah motor dengan sistem umpan balik tertutup di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk
menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Karena motor servo merupakan alat untuk mengubah energi listrik menjadi energi mekanik, maka magnet permanen motor servo yang mengubah energi listrik kedalam energi mekanik melalui interaksi dari dua medan magnet. Salah satu medan dihasilkan oleh magnet permanen dan yang satunya dihasilkan oleh arus yang mengalir dalam kumparan motor. Resultan dari dua medan magnet tersebut menghasilkan torsi yang membangkitkan putaran motor tersebut. Saat motor berputar, arus pada kumparan motor menghasilkan torsi yang nilainya konstan.
Secara umum terdapat 2 jenis motor servo. yaitu motor servo standard motor servo Continous. Servo motor tipe standar hanya mampu berputar 90 derajat dan 180 derajat, motor servo standar sering dipakai pada sistem robotika misalnya untuk membuat RobotArm (Robot Lengan). Sedangkan jenis servo motor Continous dapat berputar sebesar 360 derajat. Motor servo Continous sering dipakai untuk MobileRobot.
Motor servo merupakan sebuah motor dc kecil yang diberi sistem gear dan potensiometer sehingga dia dapat menempatkan posisi yang dikehendaki. Karena motor ini menggunakan system Close Loop sehingga posisi yang dikehendaki bisa dipertahankan.
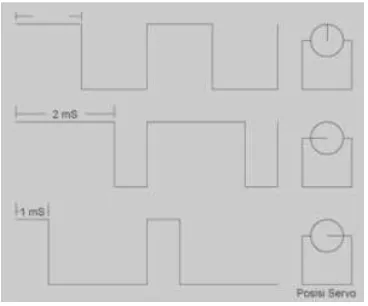
Pengendalian gerakan batang motor servo dapat dilakukan dengan menggunakan metode PWM (Pulse Width Modulation). Teknik ini menggunakan sistem lebar pulsa untuk mengemudikan putaran motor. Sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Tampak pada gambar 2.15 dengan pulsa 1.5 ms pada periode selebar 2 ms maka sudut dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan arah jarum jam.
Gambar 2.15 Posisi Servo
Gambar 2.16 Prinsip Kerja Servo
2.4 Driver Relay Motor DC
2.4.1 Relay
Relay adalah saklar mekanik yang dikendalikan atau dikontrol secara
elektronik (elektro magnetik). Saklar pada relay akan terjadi perubahan posisi OFF ke ON pada saat diberikan energi elektro magnetik pada armature relay tersebut. Relay pada dasarnya terdiri dari 2 bagian utama yaitu saklar mekanik dan sistem pembangkit elektromagnetik (induktor inti besi). Saklar atau kontaktor relay dikendalikan menggunakan tegangan listrik yang diberikan ke induktor
pembangkit magnet untuk menarik tuas saklar atau kontaktor relay. Relay yang ada di pasaran terdapat berbagai bentuk dan ukuran dengan tegangan kerja dan jumlah saklar yang bervariasi.[1]
Relay dibutuhkan dalam rangkaian elektronika sebagai eksekutor sekaligus
interface antara beban dan sistem kendali eletronik yang berbeda sistem power
supply. Secara fisik antara saklar atau kontaktor dengan elektromagnet relay
Relay elektromagnet dibagi menjadi 2 jenis yaitu :
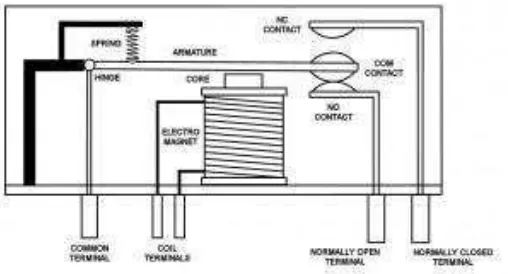
1. Relay Elektro Mekanik Posisi NC (Normally Close)
Gambar 2.17 Relay Elektro Mekanik Posisi NC (Normally Close)
Kontruksi relay elektro mekanik diatas dapat diuraikan sistem kerja atau proses relay bekerja. Pada saat elektromagnet tidak diberikan sumber tegangan maka tidak ada medan magnet yang menarik armature, sehingga saklar relay tetap terhubung ke terminal NC
(Normally Close) seperti terlihat pada gambar 2.17. Kemudian pada saat elektromagnet diberikan sumber tegangan maka terdapa medan magnet yang menarik armature, sehingga saklar terhubung ke terminal NO (Normally Open).
2. Relay Elektro Mekanik Posisi NO (Normally Open)
Relay elektro mekanik memiliki kondisi saklar atau kontaktor dalam 3
posisi. Ketiga posisi saklar atau kontaktor relay ini akan berubah pada saat relay mendapat tegangan sumber pada elektromagnetnya. ketiga posisi saklar tersebut adalah :
1. Posisi Normally Open (NO) yaitu posisi saklar relay yang terhubung ke terminal NO (Normally Open). Kondisi ini akan terjadi pada saat relay mendapat tegangan sumber pada elektromagnet.
2. Posisi Normally Close (NC) yaitu posisi saklar yang terhubung ke terminali NC (Normally Close). Kondisi ini akan terjadi pada saat relay tidak mendapat tegangan sumber pada elektromagnet.
3. Posisi Change Over (CO) yaitu kondisi perubahan armature saklar relay yang berubah dari posisi NC ke NO atau sebaliknya dari NO
ke NC. Kondisi ini akan terjadi saat sumber tegangan diberikan ke elektromagnet atau saat sumber tegangan diputus dari elektromagnet relay.
Jenis relay dan desain saklar relay yang dapat digunakan antra lain:
1. Single Pole Single Throw (SPST), relay ini memiliki 4 terminal yaitu 2 terminal untuk input kumparan elektromagnet dan 2 terminal saklar, relay ini hanya memiliki posisi NO (Normally Open) saja.
2. Single Pole Double Throw (SPDT), relay ini memiliki 5 terminal yaitu terdiri dari 2 terminal untuk input kumparan elektromagnetik dan 3 terminal saklar. Relay jenis ini memiliki 2 kondisi NO dan NC.
3. Double Pole Single Throw (DPST), relay jenis ini memiliki 6 terminal yaitu terdiri dari 2 terminal untuk input kumparan elektromagnetik dan 4 terminal saklar untuk 2 saklar yang masing-masing saklar hanya meiliki kondisi NO saja.
Disini penulis menggunkan relay Double Pole Double Throw dengan karakter Normally Close, berikut rangkaian Driver Relay pada gambar 2.19
Gambar 2.19 Rangkaian Driver Relay 2.4.2 L293D
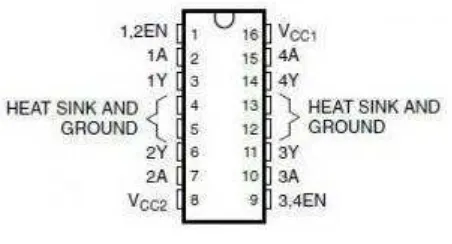
IC L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri dengan kemampuan mengalirkan arus 1
Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge
untuk 2 buah motor DC. Konstruksi pin driver motor DC IC L293D dapat dilihat pada gambar 2.20 [6]
Fungsi Pin Driver motor DC IC L293D, yaitu :
1. Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
2. Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC. 3. Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing
driver yang dihubungkan ke motor DC.
4. Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC
yang dikendalikan.
5. Pin GND (Ground) adalah jalur yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
Driver motor DC IC L293D memiliki fitur yang lengkap untuk sebuah driver
motor DC sehingga dapat diaplikasikan dalam beberapa teknik driver motor DC dan dapat digunakan untuk mengendalikan beberapa jenis motor DC. Fitur yang dimiliki driver motor DC IC L293D sesuai dengan datasheet adalah sebagai berikut :
1. Wide supply- Voltage Range :4.5 V s/d 36 V. 2. Separate Input- Logic Supply.
3. Internal ESD Protection. 4. Thermal Shutdown.
5. High-Noise-Immunity Inputs.
6. Functionally Similar to SGS L293 and SGS L293D. 7. Ouput Current 1 A per Channel (600 mA for L293D). 8. Peak Output Current 2 A per Channel (1.2 A for L293D).
Berikut rangkaian aplikasi driver motor DC IC L293D pada gambar 2.21
Gambar 2.21 Rangkaian Driver Motor DC IC L293D
2.5 Modul HX711
HX711 merupakan module timbangan yang memiliki prinsip kerja mengkonversi perubahan yang terukur dalam perubahan resistensi dan mengkonversinya ke dalam besaran tegangan melalui rangkaian yang ada. HX711 ini terintegrasi dari “Avia Semiconductor”, HX711 presisi 24-bit analog to digital (ADC) yang didesain untuk sensor timbangan digital dalam industrial kontrol aplikasi yang terkoneksi sensor load cell. Berikut spesifikasi teknis modul HX711 dan Gambar kontruksi HX711 [8] :
1. Dua kanal ADC (dapat digunakan untuk 2 load cell) dengan keluaran TTL (serial tersinkronisasi, Dout dan SCK).
2. Tegangan operasi 5 VDC
3. Tegangan masukan differensial ± 40 mV pada skala penuh. 4. Akurasi data 24 bit (24-bit ADC).
5. Frekuensi pembacaan (refresh rate) 80 Hz. 6. Konsumsi arus kurang dari 10 mV
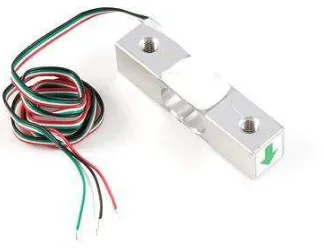
2.6 Sensor Load Cell
Load Cell adalah komponen utama pada sistem timbangan digital. Tingkat
keakurasian timbangan tergantung dari jenis load cell yang dipakai. Sensor load cell apabila diberi beban pada inti besi maka nilai resistansi di strain gauge akan
berubah yang dikeluarkan melalui empat buah kabel. Dua kabel sebagai eksitansi dan dua kabel lainnya sebagai sinyal keluaran ke kontrolnya. Gambar 2.23 adalah bentuk fisik dari sensor load cell.[8]
Gambar 2.23 Sensor Load Cell
Sebuah Load Cell terdiri dari konduktor, strain gaguge, dan wheatsone bridge. Berikut ini beberapa penjelasan mengenai definisi load cell. Tegangan keluaran dari sensor Load Cell sangat kecil, sehingga untuk mengetahui perubahan tegangan keluaran secara linier dibutuhkan rangkaian penguat instrumen. Dalam hal ini digunakan Module HX711 yang memang dibuat khusus untuk menguatkan tegangan keluaran yang sangat kecil hingga kurang dari satuan milivolt, salah satunya sensor Load Cell, hingga ukuran tegangan dalam satuan
milivolt. Konversi terjadi secara tidak langsung dalam dua tahap.[9]
Lewat pengaturan mekanis, gaya tekan dideteksi berdasarkan deformasi dari matriks pengukur regangan (strain gauges) dalam bentuk resistor planar. Regangan ini mengubah hambatan efektif (effective resistance) empat pengukur regangan yang disusun dalam konfigurasi jembatan Wheatstone (Wheatstone bridge) yang kemudian dibaca berupa perbedaan potensial (tegangan). Karena
untuk itulah pada timbangan ini harus menggunakan modul HX711 yang beresolusi 24 bit.[9]
Dengan tingkat presisi setinggi ini, penulis dapat mengukur berat beban dalam resolusi 5 Kg/224 atau setara dengan ketepatan 298 µg (0,298 mg atau 0,000298 gr). Ketepatan ini tiga kali lipat lebih tinggi dibandingkan tingkat ketepatan yang ada pada timbangan emas atau permata (jewelry weight scale) komersial kelas premium yang presisinya hanya mencapai 0,001 gr (1 mg), sehingga tantangan pembuatan timbangan elektronis yang presisi bukan lagi terletak pada sisi elektronisnya namun lebih pada akurasi rancang bangun mekanis dari timbangan tersebut. Berikut spesifikasi teknis dan gambar kontruksi load cell :
1. Beban maksimum : 5000 gram (5 Kg).
2. Rentang tegangan keluaran : 0,1 mV ~ 1,0 mV/ V (skala 1:1000 terhadap tegangan masukan, error margin ≤ 1,5%). 3. Implementasi masukan (input impedance) : 1066 Ω ±20%. 4. Impedansi keluaran (output impedance) : 1000 Ω ±10%. 5. Tegangan masukan maksimum : 10 Volt DC.
6. Rentang suhu operasional : -20 ~ +65˚C. 7. Material : Alumunium Alloy.
2.7 Liquid Crystal Display (LCD)
LCD (Liquid Crystal Display) merupakan perangkat elektronik yang terbuat dari kristal cair yang digunakan untuk menampilkan karakter atau bilangan sebagai informasi dari kerja suatu system berbasis mikrokontroler. Setiap LCD sudah dilengkapi IC driver yang berfungsi sebagai kontrolnya. Salah satu tipe LCD yang banyak digunakan adalah LCD tipe JHD162A yaitu LCD yang mempunyai 2 baris tampilan dan setiap baris dapat menampilkan hingga 16 kolom karakter. Setiap baris dan kolom mempunyai alamat sendiri-sendiri.
Gambar 2.25 LCD 2x16
Gambar 2.26 Rangkaian Interface LCD
2.8 Keypad 4x4
Keypad Matriks 4x4 adalah tombol-tombol yang disusun secara matriks
(baris x kolom) sehingga dapat mengurangi penggunaan pin input. Sebagai contoh Keypad Matriks 4x4 cukup menggunakan 8 pin untuk 16 tombol. Hal tersebut
dimungkinkan karena rangkaian tombol disusun secara horizontal membentuk baris dan secara vertikal membentuk kolom.[1]
Proses pengecekan dari tombol yang dirangkai secara matriks adalah teknik scanning, yaitu proses pengecekan yang dilakukan dengan cara memberi umpan data pada satu bagian dengan mengecek feedback pada bagian yang lain. Dalam hal ini, pemberian umpan data dilakukan pada bagian baris dan pengecekan feedback pada bagian kolom.
Gambar 2.28 Keypad 4x4
Namun demikian, sebagai konsekuensi dari penggunaan bersama satu jalur (missal: baris satu (B1)), maka tidak dimungkinkan pengecekan dua tombol sekaligus dalam satu slot waktu. Proses pengecekan dari tombol yang dirangkai secara matriks adalah dengan teknik scanning, yaitu proses pengecekan yang dilakukan dengan cara memberikan umpan data pada satu bagian dan mengecek feedback pada bagian yang lain. Dalam hal ini, pemberian umpan data dilakukan
Cara kerja pada gambar 2.28 , tombol yang ditekan adalah tombol “5” maka B2 bernilai nol, sedangkan B1, B3, dan B4 adalah satu. Kemudian dengan mengetahui asal data dari B2, dan feedback terdeteksi pada K2, maka dapat disimpulkan bahwa tombol yang ditekan adalah tombol “5”.
2.9 Regulator
Regulator tegangan menyediakan output tegangan DC yang konstan dan secara terus menerus menahan tegangan output pada nilai yang diinginkan. Regulator hanya dapat bekerja jika tegangan input (Vin) lebih besar daripada tegangan output (Vout). Biasanya perbedaan tegangan input dengan output yang direkomendasikan tertera pada datasheet komponen tersebut
Gambar 2.29 IC Regulator
2.10 Perangkat Lunak
Arduino IDE merupakan free software yang yang dikembangkan khusus untuk mengakomodasi board Ardunio, seperti melakukan compile program, pengisian kode program, pengisian bootloader, dan sejenisnya. Program ini memiliki library internal yang berfungsi untuk mempermudah dalam pengaksesan fitur-fitur yang dimiliki oleh board Arduino. Oleh sebab itu, apabila menggunakan board Arduino, maka software yang digunakan untuk membuat program disarankan menggunakan Arduino IDE. Apabila menggunakan software compiler lain, seperti Code Vision AVR, Bascom AVR, ataupun AVRGCC, maka fitur dan kemudahan yang ditawarkan oleh Arduino tidak dapat dijumpai.
program (uploadsketch) digunakan untuk mengisikan kode program yang telah dibuat agar masuk ke dalam mikrokontroler dengan bantuan bootloader. Pada proses ini hanya perlu memberikan catu daya pada DT-AVR Inoduino sebesar 9 s/d 12 Volt dan menghubungkan DT-AVR Inoduino ke PC melalui koneksi USB (virtualCOM).
Proses burnbootloader merupakan proses pengisian bootloader ke dalam DT-AVR Inoduino dengan bantuan eksternal programmer. adapun fungsi dari bootloader ini adalah untuk membantu proses pengisian kode program
(uploadsketch) melalui port USB (virtual COM). Perihal eksternal program yang digunakan pada proses ini adalah eksternal programmer yang didukung oleh Arduino IDE. Adapun programmer yang kompatibel adalah programmer AVRISP, AVRISPmkll, USBtinyISP dan sejenisnya.
2.11 Pengukuran Akurasi Dan Eror
Pengukuran adalah proses perbandingan antara suatu besaran yang tidak diketahui dengan suatu besaran standar yang diperoleh, meliputi hubungan suatu alat ukur di dalam sistem dengan pertimbangan dan pengamatan dari hasil respon pada instrument. Pengukuran yang diperoleh adalah adalah pengukuran besaran yang disebut dengan “haga sebenarnya (true value)” akan tetapi sangat sulit untuk memberi definisi harga yang sebenarnya. Untuk instrument ini secara cermat, diperlukan pemahaman terhadap prinsip kerjanya dan kemampuan dalam memperkirakan apakah instrument tersebut sesuai untuk pemakaian yang direncanakan. Dalam pengukuran, digunakan sejumlah istilah yang akan didefinisikan sebagai berikut :
1. Ketelitian (Accuracy) adalah harga terdekat dengan mana suatu pembacaan instrument mendekati harga sebenarnya dari variabel yang diukur ; tingkat ketepatan pengukuran dibandingkan dengan harga (nilai) yang diharapkan.
Tingkatan dimana suatu pengukuran sesuai dengan harga (nilai) yang diharapkan ditunjukan dalam syarat-syarat kesalahan dari pengukuran. Kesalahan mungkin ditunjukan lain yaitu dengan kesalahan absolute atau presentase kesalahan. Kesalahan absolute dapat didefinisikan sebagai perbedaan antara variabel harga (nilai) yang diharapkan dengan variabel harga (nilai) pengukuran.
e = Yn - Xn ... (2.1)
dimana :
e : Kesalahan absolute
Yn : Harga (nilai) yang diharapkan Xn : Harga (nilai) pengukuran
Jika kita mengharapkan untuk menunjukan kesalahan sebagai presentase, maka dapat kita rumuskan sebagai hasil bagi antara kesalahan absolute dengan harga yang diharapkan dikali dengan 100%
% Kesalahan =
………... (2.2)
Persamaan di atas lebih sering digunakan untuk menyatakan pengukuran dengan syarat akurasi relative lebih besar dari pada kesalahan, atau
A = 1 -
……… (2.3)
Dimana A adalah akurasi relative yang dapat dinyatakan sebagai presentase akurasi, yaitu :
54
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Berdasarkan hasil dari Pengujian alat dan Analisa data dimana perangkat keras (hardware) dapat beroperasi sesuai dengan perancangan awal maka didapatkan beberapa kesimpulan sebagai berikut :
1. Terjadi pengurangan berat dari hasil penggilingan yang dikeluarkan setelah mengalami penggilingan.
2. Keluaran sinyal listrik akan mengalami kenaikan apabila mendapatkan beban dan akan mengalami penurunan apabila beban dikurangi.
3. Rata-rata lama penggilingan tiap 1 gram yakni 4 menit. 4. Masih terjadi eror pada alat yang telah dibuat.
5. Dari tingkat keberhasilan rata-rata sebesar 90 % serta eror rata-rata 10 %.
5.2. Saran
Alat yang dibuat dalam tugas akhir ini masih terdapat kekurangannya untuk itu, penulis akan memberikan saran bagi yang akan mengembangkan tugas akhir ini. Adapun saran dari penulis adalah sebagai berikut :
1. Perlu dikembangkan dalam hal pengontrolan kendali pada motor power window yang dimana ketika baterai yang digunakan sebagai sumber
utama mulai berkurang level tegangannya, maka akan mempengaruhi terhadap kecepatan putaran motor, untuk itu kedepannya perlu ditambahkan kontrol PID (Proportional Integral Derivative) agar putaran motor tetap stabil.
2. Pada penampang obat diperluas agar dapat menampung obat lebih banyak.
3. Meningkatkan sensifitas penimbangan yang lebih tinggi atau presisi 4. Alat ini dapat dikembangkan lagi dengan menambahkan data
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada
Program Studi Strata Satu Sistem Komputer di Jurusan Teknik Komputer
Oleh
ZULFAHMI
10208106
Pembimbing
Ayub Subandi, M.T
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
vii
LEMBAR PENGESAHAN ... i
LEMBAR PERNYATAAN ... ii
viii
2.4.2 L293D ... 23
2.5 Modul HX711 ……… 25 2.6 Sensor Load Cell ……… 26 2.7 Liquid Crystal Display (LCD) ………..…. 28 2.8 Keypad 4x4 ……….……… 29
2.9 Regulator ……… 30 2.10 Perangkat Lunak ………...……… 30 2.11 Pengukuran Akurasi Dan Eror ………..………..…………. 31 BAB III PERANCANGAN SISTEM ... 33
3.1 Rancang Bangun Alat ... 33
3.2 Perancangan Perangkat Keras ... 34
3.2.1 Rangkaian Pengontrol Sistem Penggiling Otomatis ... 34
3.2.2 Rangkaian Driver Relay Motor DC ... 37
3.2.3 Rangkaian Sensor Load Cell Pada HX711 ... 37
3.2.4 Rangkaian Driver Motor Stepper ... 38
3.2.5 Rangkaian Catu Daya ... 38
3.2.6 Desain Penggilingan Otomatis ... 39
3.3 Peracangan Perangkat Lunak ... 43
3.3.1 Algoritma Dasar ... 43
3.3.2 Prosedur Keypad ………..………….……… 45
3.3.3 Desain Menu Pada LCD ... 46
BAB IV HASIL PENGUJIAN DAN ANALISA ... 47
4.1 Pengujian Alat ... 47
4.1.1 Cara Penggunaan Alat Penggiling Obat ... 47
4.1.2 Pengujian Sistem Penggiling ………..….……. 49
ix
x
Tabel 3.1 Pin-Pin Konfigurasi Mikrokontroler dan Komponen ... 36
Tabel 3.2 Konfigurasi Keypad ……….……… 45
Tabel 4.1 Data Hasil Pengujian Penggilingan Obat Dengan Pembagi Dua ... 49
xi
Gambar 2.1 Sistem Open Loop ... 5
Gambar 2.2 Sistem Close Close Loop ... 6
Gambar 2.3 ATMEGA128 ... 6
Gambar 2.4 Inoduino Board ... 9
Gambar 2.5 Dasar Power Window ... 10
Gambar 2.6 Kontruksi Motor Power Window ... 10
Gambar 2.7 Penampang Melintang Dari Motor Stepper tipe VR ... 14
Gambar 2.8 Ilustrasi Motor Stepper tipe PM ... 14
Gambar 2.9 Penampang Melintang Motor Stepper tipe hybrid ... 15
Gambar 2.10 Motor Stepper Dengan Lilitan Unipolar ...15
Gambar 2.11 Motor Stepper Dengan Lilitan Bipolar... 16
Gambar 2.12 Skema Rangkaian Pengendali Motor Stepper ...17
Gambar 2.13 Bentuk Pulsa Keluaran Dan Penerapan Pulsa Pengendali Motor ...17
Gambar 2.14 Motor Servo... 18
Gambar 2.15 Posisi Servo ... 19
Gambar 2.16 Prinsip Kerja Servo ... 20
Gambar 2.17 Relay Elektro Mekanik Posisi NC (Normally Close) ... 21
Gambar 2.18 Relay Elektro Mekanik Posisi NO (Normally Open) ... 21
Gambar 2.19 Rangkaian Driver Relay ... 23
Gambar 2.20 Kontruksi IC L293D ... 23
Gambar 2.21 Rangkaian Driver Motor DC IC L293D ... 25
Gambar 2.22 Modul HX711 ... 25
Gambar 2.23 Sensor Load Cell ... 26
Gambar 2.24 Kontruksi Sensor Load Cell ... 27
Gambar 2.25 LCD 2x16 ... 28
Gambar 2.26 Rangkaian Interface LCD ... 28
Gambar 2.27 Pin Konfigurasi ... 28
Gambar 2.28 Keypad 4x4 ... 29
xii
Gambar 3.3 Soket PCB POWER (J6) Dan PCB Analog (J7) ... 35
Gambar 3.4 Soket Digital (J5) ... 35
Gambar 3.5 Rangkaian Driver Relay Motor DC ... 37
Gambar 3.6 Rangkaian Sensor Load Cell Pada HX711 ... 37
Gambar 3.7 IC L293D ... 38
Gambar 3.8 Rangkaian Catu Daya 5volt, 9 volt Dan 12 volt ... 39
Gambar 3.9 Rancangan Kerangka Penggilingan ... 39
Gambar 3.10 Penggilingan Tampak Depan ... 40
Gambar 3.11 Penggilingan Tampak Belakang ... 40
Gambar 3.12 Penggilimhan Tampak Atas ……….……….. 41
Gambar 3.13 Antarmuka Sebagai Komunikasi ... 41
Gambar 3.14 Rangkaian Pengontrol Alat ... 42
Gambar 3.15 Motor Pendorong Obat ... 42
Gambar 3.16 Timbangan Obat ... 43
Gambar 3.17 Diagram Alir Algoritma Dasar Kerja Alat ... 44
Gambar 3.18 Perancangan Antarmuka Pada LCD 2x16 ... 46
Gambar 4.1 Tampilan Awal ... 47
Gambar 4.2 Tampilan Berat Obat ... 47
Gambar 4.3 Tampilan Melihat Hasil Timbang ... 47
Gambar 4.4 Tampilan Hasil Timbang Obat ... 48
Gambar 4.5 Tampilan Proses Pembagian ... 48
Gambar 4.6 Tampilan Giling Obat ………..………. 48
Gambar 4.7 Tampilan Proses Giling ... 48
Gambar 4.8 Tampilan Berat Akhir ... 48
Gambar 4.9 Tampilan Proses Penimbangan ... 49
Gambar 4.10 Tampilan Ambil Obat ... 49
Gambar 4.11 Grafik Akurasi dan Eror Pembagi Dua ... 50
Gambar 4.12 Grafik Waktu Penggilingan Pembagi Dua ... 50
Gambar 4.13 Grafik Akurasi dan Eror Pembagi Tiga ... 51
55
[1] Albert, P, Malvino. Prinsip-Prinsip Elektronika. Jilid 1, Jakarta : Salemba Teknika, 2003
[2] Endra Pitowarno. Robotika Disain, Kontrol, dan Kecerdasan Buatan, Yogyakarta, 2006
[3] Banzi, Massimo. “Getting Started with Arduino”.O’Reilly.2008
[4] J.G. Rocha, C. Couto, J.H. Correia. 2000. Smart Load Cells: an industrial application. Sensor and Actuator, Science Direct Journal, Elsevier.
[5] Christianto, Tjahyadi. Driver motor Berbasis H-Bridge, Yogyakarta, 2014 [6] Taufiq D.S., Suyadhi. Robot 1 Driver Motor, Bandung, 2013
[7] William David Cooper, Instrumentasi Elektronik dan Pengukuran, Agustus 2015 (https://www.scribd.com/doc/60303652/Bab-1-Pengukuran-Dan-Kesalahan#scribd), diakses 9 Agustus 2015.
[8] IndoWare, Modul Timbangan HX711, Agustus 2015 (http://www.indo- ware.com/produk-2859-hx711-hx-711-adc-sensor-weigh-timbangan-modul-.html), diakses 9 Agustus 2015.
[9] Mashuri, Electric Instrument, Agustus 2015
DATA PRIBADI
Nama : Zulfahmi
Jenis kelamin : Laki-laki
Tempat, Tanggal Lahir : Medan, 13 Juli 1990
Kewarganegaraan : Indonesia
Status Perkawinan : Belum Menikah
Tinggi, Berat Badan : 168 cm, 47kg
Kesehatan : Sangat Baik
Agama : Islam
Alamat Lengkap : Jl.Pelesiran Gg.Stune Rt 03/Rw 06 No.117 Kel.Lebak Siliwangi Kec.Coblong, Bandung 40132
Telepon : 087823931071
E-mail : [email protected]
RIWAYAT ORANG TUA
Nama Ayah : Sofyan
Alamat Lengkap : Jl.Pelesiran Gg.Stune Rt 03/Rw 06 No.117 Kel.Lebak Siliwangi Kec.Coblong, Bandung 40132
Telepon : 022-82520250
SD PELESIRAN BANDUNG, 2002
SMP NASIONAL BANDUNG, 2005
SMK PUTRA PAJAJARAN BANDUNG, 2008
UNIKOM (TEKNIK KOMPUTER), 2015
- Non-formal
Seminar Animation , 2013
Enter Training Center, kursus B.Inggris , 2013
KEMAMPUAN
Kemampuan Teknik Komputer dan Informatika (Maintenance, Teknisi, Networking,
MS office, corel application, adobe application, web programming & design,
programmer aplication)
PENGALAMAN KERJA
Kerja praktek di PT. Timah (Persero) selama 2 bulan pada 2011 sebagai instalasi
jaringan dan teknisi.
Bandung, 22 Agustus 2015
1
Jurusan Teknik Komputer Unikom, Bandung
1
[email protected], [email protected]
ABSTRAK
Penggilingan otomatis ini merupakan salah satu alternatif yang dapat menggantikan proses penggilingan obat secara biasa atau umum, karena penggiling otomatis ini tidak hanya menggiling obat saja melainkan melakukan penakaran obat yang telah digiling. Hasil pengujian pada penggilingan obat otomatis ini berat maksimum yang dapat digiling adalah 6 gram. percobaan pada pembagi 2 dan pembagi 3 menunjukan bahwa waktu total penggilingan rata-rata yang yang diperlukan yaitu 1 gram/ 4 menit, waktu yang digunakan cukup lama dikarenakan bahan yang membentuk obat tersebut sangat padat dan keras serta proses penggilingan dilakukan dua kali, pada tahap penggilingan pertama untuk penghancuran dan pada tahap kedua proses penghalusan yang menggunakan motor servo yang cukup lambat.
Pada hasil penggilingan ini terjadinya eror atau penyusutan pada serbuk obat yang keluar dikarenakan adanya space pada dasar penggiling sehingga terdapat serbuk obat yang masih tertinggal didalam mesin penggilingan obat. Rata-rata eror percobaan tiap 1 gram masing-masing yaitu kurang dari 10 %.
Kata Kunci: Penggilingan, sensor timbangan, modul timbangan, motor penggiling obat.
1. PENDAHULUAN
Saat ini penggilingan obat berjenis tablet untuk pembuatan puyer yang dikerjakan di laboratorium masih dikerjakan secara manual oleh apoteker. seperti pada penghancuran masih dikerjakan oleh apoteker, sehingga tidak menutup kemungkinan pasti akan terjadinya suatu kesalahan saat memberi takaran komposisi dikarenakan manusia mempunyai keterbatasan dalam kesehatan yang ada sehingga berdampak kurang telitinya dalam memberi takaran pada saat penakaran obat.
2. PERANCANGAN
Perancangan yang dilakukan terdiri dari perancangan mekanik, perancangan perangkat keras.
Perancangan Mekanik
Gambar 1. Desain Keseluruhan Penggilingan
Gambar 2. Tampak Atas
2
Gambar 4. Kontroller Alat
Perancangan Perangkat Keras
Sistem yang akan dirancang ditunjukkan pada Gambar 2.
Gambar 5. Diagram Blok Sistem
Sistem kontrol Arduino Inoduino yang berfungsi untuk mengolah data dari sensor Loadcell, modul HX711, Driver Motor Stepper, Driver Relay Motor DC, Servo.
Sensor Load cell adalah komponen utama pada sistem timbangan digital, tingat keakurasian timbangan ini tergantung dari jenis load cell yang dipakai, sensor load cell apabila diberi beban pada inti besi maka nilai resistansi di strain gaugeakan berubahyang dikeluarkan melalui empat buah kabel, dua kabel sebagai eksistansi dan dua kabel lainnya sebagai sinyal keluaran ke kontrolnya. Gambar di bawah ini adalah bentuk fisik dari sensor load cell.
Gambar 6. Sensor Load Cell
mengkonversi perubahan yang terukur dalam perubahan resistansi dan mengkonversinya ke dalam besaran tegangan melalui rangkaian yang ada. HX711 ini terintegrasi dari Avia Semiconductor
presisi 24-bit analog to digital (ADC)
Gambar 7. Rangkaian Sensor Loadcell HX711
Driver Motor Stepper menggunakan IC L293D dimana IC ini di desain khusus sebagai Driver Motor DC atau Motor Stepper dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor stepper yang dikontrol dengan driver IC L293D yang dapat dihubungkan ke ground (GND). Berikut gambar rangkaian driver motor stepper dibawah ini
Gambar 8. Rangkaian Driver Motor Stepper
Driver Relay Motor DC digunakan sebagai saklar pada motor DC sekaligus interface antara beban dan sistem kendali elektronik yang berbeda sistem power suplly . berikut gambar rangkaian driver motor DC
3
yang nantinya akan dijadikan sebagai algoritma kendali dari keseluruhan sistem kerja pada penggiling otomatis. Algoritma tersebut dituliskan pada sebuah Program Arduino dengan bahasa C/ C++ kemudian disimpan pada sebuah Arduino Inoduino, maka secara otomatis Inoduino akan mengerjakan seluruh program.
Gambar 10. Prinsip Kerja Penggiling Obat
3. HASIL PENGUJIAN DAN ANALISA
Cara penggunaan penggilingan obat otomatis
Gambar 11. Tampilan Awal
Gambar 12. Tampilan Berat Obat
Sedangkan tampilam pada gambar di atas menampilkan berat obat yang sedang ditimbang.
Gambar 13. Tampilan Lihat Hasil
Tampilan untuk melihat hasil timbangan obat dengan menekan keypad tekan “B”.
Gambar 14. Tampilan Hasil Timbangan Obat
Tampilan pada gambar di atas menunjukan melakukan proses pembagian dengan “input angka”.
Gambar 16. Tampilan Giling Obat
Tampilan pada gambar di atas menunjukan apabila obat telah terhitung berat dan proses pembagian maka langkah selanjutnya “Giling Obat” dengan menekan “C”, jika untuk membatalkan penggilingan untuk merubah hasil bagi dapat menekan “*”.
Gambar 17 Tampilan Proses Giling
4
Gambar 18 Tampilan Berat Akhir
Pada Tampilan ini menunjukan berat akhir pada LCD dengan menekan “D”.
Gambar 19. Tampilam Proses Penggilingan
Untuk tampilan akhir ini akan muncul setelah proses penggilingan selesai. Setelah itu akan muncul tampilan pada gambar, dimana “HASIL =_” dan pada “Berat Akhir = _ gram” menunjukan apabila berat yang keluar sesuai dengan Berat Akhir maka proses selesai.
Gambar 20. Tampilan Ambil Obat
Jika proses penimbangan selesai atau kondisi terpenuhi maka akan muncul tampilan “Ambil Obat” pada layar LCD
A.Pengujian Alat
Tabel 1 pengujian dengan pembagi 2
Gambar 21. Data Presentasi Akurasi dan Eror
Gambar 22. Waktu Penggilingan Pembagi Dua
Tabel 2 pengujian dengan pembagi 3
Gambar 23. Presentasi Akurasi dan Eror Pembagi Tiga
Gambar 24. Waktu Penggilingan Pembagi Tiga
5
Dilihat dari data percobaan di atas diambil 2 kali percobaan pada pembagi 2 menunjukan bahwa waktu total penggilingan rata-rata yang yang diperlukan yaitu 1 gram/ 4 menit, waktu yang digunakan cukup lama dikarenakan bahan yang membentuk obat tersebut sangat padat dan keras serta proses penggilingan dilakukan dua kali, pada tahap penggilingan pertama untuk penghancuran dan pada tahap kedua proses penghalusan yang menggunakan motor servo yang cukup lambat. Pada percobaan dengan pembagi tiga yang memakan waktu yang cukup lama dikarenakan percobaan ini menggunakan pembagi tiga serta penggilingan pada tahap kedua proses penghalusan yang mengunakan motor servo.
Terjadinya eror pada output yang berupa serbuk obat yang keluar dikarenakan adanya space pada dasar penggiling sehingga terdapat serbuk obat yang masih tertinggal didalam mesin penggilingan obat. Rata-rata eror percobaan masing-masing yaitu kurang dari 10 %.
Perhitungan Performansi Alat
Setelah diperoleh data pengukuran kemudian dilakukan perhitungan gunamengetahui performa masing-masing alat.
Perhitungan Eror
Eror atau kesalahan adalah penyimpanan nilai dari suatu pengukuran terhadap harga sebenarnya, dapat dinyatakan dalam error absolute atau prosen eror.
e= | Yn - Xn | ……… (1 )
dimana e = error absolute, Yn = nilai sebenarnya
Xn = nilai hasil pengukuran
Jika ingin menyatakan eror dalam prosen adalah sebagai berikut :
Prosen error % = ……….(2 )
Data-data hasil pengukuran, kemudian
dihitung untuk mengetahui nilai eror dengan
menggunakan persamaan (2).
hasil pengukuran suatu alat ukur terhadap suatu nilai
yang benar. Untuk mendapatkan nilai akurasi
relative digunakan persamann sebagai berikut :
| x 100% ………. (3)
Dimana :
Xn = nilai hasil pengukuran
Yn = nilai sebenarnya
A= akurasi relative
Akurasi dapat pula dinyatakan dalam prosen akurasi sebagai berikut :
Prosen error = 100 % - prosentase eror ……(4)
Nilai akurasi pada pengujian alat ini dinyatakan dalam persen dengan menggunakan persamaan 4.
6
Berdasarkan hasil pengujian dan analisa data di atas dimana perangkat keras (Hardware) dapat beroperasi sesuai dengan perancangan awal maka didapatkan beberapa kesimpulan sebagai berikut : 1. Sistem penggilingan obat ini difungsikan
dengan motor DC (Power Window) dan motor servo .
2. Terjadi pengurangan berat dari hasil penggilingan yang dikeluarkan setelah mengalami proses penggilingan.
3. Masih terjadi error pada alat yang telah dibuat. 4. Keluaran sinyal listrik akan mengalami
kenaikan apabila mendapatkan beban dan akan mengalami penurunan apabila beban dikurangi. 5. Pada perancangan ini sensor strain gauge load
cell L6B menggunakan tegangan listrik 5 Volt DC.
Adapun saran dari penulis adalah sebagai berikut :
1. Perlu dikembangkan dalam hal pengontrolan kendali pada motor power window yang dimana ketika baterai yang digunakan sebagai sumber utama mulai berkurang level tegangannya, maka akan mempengaruhi terhadap kecepatan putaran motor serta pada proses penggilingan obat terhambat karena perputaran penggiling menjadi lambat.
2. Dan perlu diperbaiki kembali dari segi mekanik pada proses penggilingan. Karena masih terdapat error,missal hasil dari proses penggilingan kasar. 3. Apabila obat yang digiling terlalu banyak maka
penggilingan terhenti dikarenakan memenuhi ruang penggiling.
4. Alat ini dapat dikembangkan lagi dengan menambahkan data penyimpanan pada data base komputer, serta dapat dilakukan pencetakkan data menggunkan print.
5. DAFTAR PUSTAKA
[1] Albert, P, Malvino. Prinsip-Prinsip Elektronika. Jilid 1, Jakarta : Salemba Teknika, 2003 [2] Endra Pitowarno. Robotika Disain, Kontrol, dan
Kecerdasan Buatan, Yogyakarta, 2006
[3] Banzi, Massimo. “Getting Started with Arduino”. O’Reilly.2008
Load Cells: an industrial application. Sensor and Actuator, Science Direct Journal, Elsevier. [5] Christianto, Tjahyadi. Driver motor Berbasis
H-Bridge, Yogyakarta, 2014
[6] Taufiq D.S., Suyadhi. Robot 1 Driver Motor,
v
KATA PENGANTAR
Assalamu’alaikum Wr.Wb.
Puji syukur penulis panjatkan ke hadirat Allah SWT, yang telah memberikan rahmat dan karunia-Nya kepada penulis sehingga penulis dapat menyelesaikan laporan tugas akhir ini. Dalam penyusunan tugas akhir ini penulis mendapat bimbingan dan dukungan dari banyak pihak, untuk itu penulis ingin mengucapkan terimakasih kepada:
1. Ibu dan bapak yang sudah berjuang dengan sabar, baik dengan doa maupun ikhtiar. Semoga Allah SWT memberikan kemuliaan kepada keduanya di dunia dan kelak di akhirat, amiin..
2. Bapak Ayub Subandi, M.T selaku pembimbing , yang telah memberikan bimbingan dan arahan kepada penulis.
3. John Adler, M.T selaku dosen wali yang memberi koreksi dan arahan selama menempuh pendidikan.
4. Bapak dan Ibu dosen, serta seluruh staff Jurusan Teknik Komputer Universitas Komputer Indonesia, yang telah banyak memberikan ilmu, wawasan, motivasi, serta bimbingan dan bantuan kepada penulis.
5. Teman-teman 08-TK3, penulis ucapkan banyak terimakasih atas dukungan dan motivasi yang kalian berikan selama ini. Yang telah bersama-sama menimba ilmu dan membantu selama kuliah di Jurusan Teknik Komputer Universitas Komputer Indonesia.
6. Adik-adik yang sudah mendukung dan memberi motivasi kepada penulis. 7. Semua pihak yang telah banyak membantu penulis dalam mengerjakan
vi
Atas segala kebaikan yang telah diberikan semoga Allah SWT, membalas budi baik semua pihak dengan kebaikan dan pahala yang berlipat. Penulis menyadari bahwa laporan tugas akhir ini masih memiliki kelemahan untuk itu kritik dan saran sangat diharapkan.
Wassalamu’alaikum Wr. Wb.
Bandung, Agustus 2015
ii
LEMBAR PERNYATAAN
Yang bertanda tangan dibawah ini:
Nama : Zulfahmi NIM : 10208106
Menyatakan bahwa Tugas Akhir ini adalah hasil karya sendiri dan bukan merupakan duplikasi sebagian atau seluruhnya dari hasil karya orang lain yang pernah dipublikasikan atau yang sudah pernah dipakai untuk mendapatkan gelar di Universitas lain, kecuali pada bagian dimana sumber informasi dicantumkan dengan cara referensi yang semestinya.
Pernyataan ini dibuat dengan sebenar-benarnya secara sadar dan bertanggung jawab dan saya bersedia menerima sanksi berupa pembatalan Tugas Akhir saya apabila terbukti melakukan duplikasi terhadap Tugas Akhir yang sudah ada.
Bandung, Agustus 2015