ANDRIAL SAPUTRA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
Andrial Saputra: Solusi Periodik Eliptik Jacobi Persamaan Modus Tergandeng Sistem Kisi Bragg. Dibimbing Oleh: Husin Alatas
Abstrak
Persamaan modus tergandeng dalam tugas akhir ini adalah persamaan untuk sistem optik nonlinier yang bersifat periodik. Persamaan ini merupakan set persamaan diferensial parsial yang terkopel, dan untuk menganalisa kelakuan solusinya dilakukan melalui pendekatan analisis sistem dinamik. Berdasarkan pendekatan itu didapatkan sebuah set persamaan diferensial biasa orde satu yang akan dipecahkan secara analitik berupa fungsi Eliptik Jacobi (sn, cn, dan dn) dan dianalisa pula trayektori fungsi tersebut di bidang fasa.
Judul Skripsi : Solusi Periodik Eliptik Jacobi Persamaan Modus Tergandeng
Sistem Kisi Bragg
Nama : Andrial Saputra
NIM : G74053924
Menyetujui
Pembimbing Utama
Dr. Husin Alatas, M.Si
NIP: 197106041998021001
Mengetahui
Ketua Departemen
Dr. Irzaman, M.Si
NIP: 196307081995121001
Solusi Periodik Eliptik Jacobi Persamaan Modus Tergandeng
Sistem Kisi Bragg
Andrial Saputra G74053924
Skripsi
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Sains Pada Fakultas Matematika dan Ilmu Pengetahuan Alam
Institut Pertanian Bogor
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
DAFTAR RIWAYAT HIDUP PENULIS
Penulis dilahirkan di Jakarta pada tanggal 2 november 1987 oleh pasangan Ayah tercinta Syahrial dan Ibunda tercinta Sri Dewi Nursanti. Penulis merupakan anak pertama dari tiga bersaudara.
Penulis menamatkan tingkat sekolah dasar (SD) di SD Muhammadiyah 5 Jakarta, lalu melanjutkan di SLTP Muhammadiyah 9 Jakarta, selama di SLTP penulis aktif di berbagai kegiatan Rohis sekolah, dan mendapat banyak penghargaan prestasi akademis selama duduk di bangku SLTP. Setelah tamat SLTP, penulis melanjutkan studinya ke SMU 82 Jakarta, selama di SMU penulis aktif di keorganisasian Rohis SMU 82, bahkan 2 tahun berturut-turut dipercaya menjadi Ketua Umum Rohis SMU 82. Di bagian prestasi penulis selalu terbaik pertama dari kelas 1 hingga kelas 3, kemudian penulis juga banyak mengikuti perlombaan olimpiade, baik Fisika Dan Matematika.
Setelah tamat SMU, penulis melanjutkan studinya ke Institut Pertanian Bogor melalui jalur SPMB dengan mengambil program studi Fisika. Selama kuliah penulis aktif menjadi staf keilmuan HIMAFI (Himpunan Mahasiswa Fisika), Staf Ahli Departemen Sains Badan Eksekutif Mahasiswa FMIPA, Ketua TIM KHUSUS Pesta Sains 2007 dan 2008. Di bagian akademik penulis pernah menjadi Asisten Praktikum Fisika Dasar TPB (2006-2009), Asisten Praktikum Fisika Dasar untuk Mahasiswa Pra Universitas BUD (2007-2009), Asisten Praktikum Fisika Dasar Untuk Mahasiswa BUD (2008), Koordinator Asisten Praktikum Fisika Dasar TPB (2008-2009), Asisten Praktikum Fisika Lanjut (2008-2009), Asisten Dosen Fisika Modern Untuk Mahasiswa Departemen Kimia (2007-2008), Asisten Dosen Fisika Modern Untuk Mahasiswa Departemen Fisika (2007-2009), dan Asisten Dosen Fisika Nonlinear (2007-2009). Kemudian penulis juga aktif di Bimbingan Belajar Fisika TPB (Physics Challenge I) (2006-2007), Direksi Bimbingan Belajar Physics Challenge II (2007-2008), Koordinator Soal-Soal dan Koordinator Guru bimbingan di Bimbingan Superstring Privat (2008-2009).
KATA PENGHANTAR
Segala puji hanya kepunyaan Allah SWT dan shalawat serta salam semoga tercurah kepada Nabi Muhammad SAW. Atas rahmat dan hidayah Allah SWT, akhirnya penulis dapat menyelesaikan Skripsi dengan judul ”Solusi Periodik Eliptik Jacobi Persamaan Modus Tergandeng Sistem Kisi Bragg”. Dalam skripsi ini membahas berbagai formula matematis yang cukup kompleks dalam menyusun solusi ini, sehingga membutuhkan waktu yang tidak sebentar dalam menyelesaikannya, namun dengan perjuangan yang terus dilakukan penulis akhirnya bisa juga menyelesaiakan skripsi ini walau melebihi target penulis.
Tak lupa juga Penulis menyampaikan banyak terima kasih dan Penghargaan yang sebesar-besarnya kepada pihak-pihak yang telah membantu Penulis dalam penyelesaian penulisan Skripsi ini, yaitu kepada :
1. Bapak Dr. Husin Alatas Selaku Dosen Pembimbing yang telah memberikan bimbingan, masukan, tempat bertanya dan semangat kepada penulis, sehingga penulis tak gentar dalam memecahkan semua formula. Dan beliaulah yang menjadi teladan buat penulis selama kuliah.
2. Mas Doddy (Mas Hendradi Hardhienata M.Si) Selaku Dosen Fisika Teori yang selalu memberi semangat buat penulis dan humornya yang tinggi dalam kesehariannya serta kepribadiannya yang penulis banggakan.
3. Bapak Dr Irzaman dan Bapak Jajang Juansah M.Si selaku Dosen Penguji yang telah memberikan kritik, saran, semangat dan masukan yang sangat berharga untuk penulis khususnya.
4. Papa, Mama, adik-adik di rumah terima kasih atas dukungan dan doanya yang tidak pernah berhenti mendoakan penulis agar selalu berhasil.
5. Seluruh Dosen bagian Fisika Teori yang telah membuat penulis jatuh hati terhadap bidang ini yaitu Pak Faozan Ahmad M.Si, Pak Dr Agus Kartono, dan Pak Abdul Djamil Husin M.Si.
6. Seluruh Dosen Fisika dan Staf Karyawan Departemen Fisika yang telah memberikan kontribusi yang besar dalam pelaksanaan akademis.
7. Seluruh Laboran laboratorium seperti Pak Rahmat, Pak Parman, Pak Toni, dan staf yang selalu membantu penulis seperti Pak Firman, Mas Junaedi dan Mas Asep dalam pelaksanaan sarana dan prasarana dalam perkuliahan.
8. Teman-teman satu lab Fisika Teori, Rudi, Dicky, Rosyid, Candra, Caca, dan Mas Teguh. Atas semua masukan kepada penulis. Dan kebersamaannya selama berada di dalam lab teori, Serta tawa dan canda dalam menghiasi lab teori yang kata orang menyeramkan. 9. Seluruh teman-teman angkatan 42 seperti Cucu, Ario, Amel, Rizal, Fahmi, Ais, pipit, dan
masih banyak lainnya yang telah berjuang bersama di Fisika 42 dalam suka dan duka, serta angkatan Fisika 43-45.
10. Seseorang yang tidak pernah penulis lupakan selama penulis kuliah yaitu dia yang selalu menyemangati dan memberikan doa serta canda tawanya untuk penulis selama 3 tahun terakhir. so terima kasih ya (EF).
Penulis menyadari bahwa Skripsi ini jauh dari sempurna, oleh karena itu saran dan kritik yang bersifat membangun sangat diperlukan bagi penulis. Semoga Skripsi ini bermanfaat bagi semuanya, khususnya bagi penulis sendiri.
Bogor, Desember 2009 Penulis
DAFTAR ISI
Halaman
ABSTRAK... ii
LEMBAR PENGESAHAN ... iii
HALAMAN JUDUL... iv
DAFTAR RIWAYAT HIDUP... v
KATA PENGANTAR ... vi
DAFTAR ISI ... vii
DAFTAR GAMBAR ... viii
DAFTAR LAMPIRAN ………...……… ix
PENDAHULUAN ... 1
Latar belakang ... 1
Tujuan Penelitian ... 2
TINJAUAN PUSTAKA ... 2
Soliton Dalam Fisika ... 2
Analisa Sistem Dinamik ... 2
Solusi Satu Soliton Persamaan NLS ... 6
Analisis Sistem Dinamik Solusi Satu Soliton NLS ... 7
Integral Dan Fungsi Eliptik ... 8
METODE PENELITIAN ... 9
Waktu dan Tempat Penelitian ... 9
Peralatan... 9
Metode Penelitian ... 9
Studi Pustaka... 9
Penurunan Solusi Secara Eksak ... 9
Analisa Solusi Dengan Mapple 11 dan Mathematica 7 ... 9
HASIL DAN PEMBAHASAN ... 9
Solusi Eksak Soliton Optik Nonlinear Melalui Metode Sistem Dinamik... 9
Analisa Sistem Dinamik Fungsi Eliptik Jacobi Pada Soliton Optik Nonlinear... 13
KESIMPULAN DAN SARAN ... 19
Kesimpulan ... 19
Saran ... 19
DAFTAR PUSTAKA ... 20
DAFTAR GAMBAR
Halaman
Gambar 1 Ilustrasi Soliton...………. 1
Gambar 2 Kurva aliran Trayektori untuk persamaan (11) ……….……….. 3
Gambar 3 Trayektori tidak akan pernah berpotongan untuk dua keadaan berbeda ... 3
Gambar 4 Titik Node atraktor negatif...………… 4
Gambar 5 Titik Node atraktor positif ... 4
Gambar 6 Diagram harga Eigen untuk kasus titik Node ... 4
Gambar 7 Aliran Trayektori titik Sadel ... 4
Gambar 8 Diagram harga Eigen untuk kasus titik Sadel... 4
Gambar 9 Aliran Trayektori titik Sadel... 4
Gambar 10 Diagram harga Eigen untuk kasus titik Center ... 4
Gambar 11 Titik Fokus atraktor negatif... 5
Gambar 12 Titik Fokus atraktor positif ... 5
Gambar 13 Diagram Bifurkasi Sadel-Node ... 5
Gambar 14 Diagram Bifurkasi untuk kasus Bifurkasi Trans-Kritikal …... 5
Gambar 15 Diagram Bifurkasi Pitch-Fork ...……….. 5
Gambar 16 Pola Trayektori Bifurkasi Poincare Andronov Hopf ………...………….. 6
Gambar 17 Profil Solusi Persamaan (34) …...……….. 7
Gambar 18 Pola Trayektori untuk kasus β<0 dan κ>0 Dan sesuai pula dengan persamaan (38) untuk kasus H=0...… 7
Gambar 19 Pola aliran Trayektori persamaan (39) Yang dikombinasikan dengan persamaan (40) …...………. 8
Gambar 20 Diagram Bifurkasi satu dimensi untuk persamaan (77)……… 11
Gambar 21 Diagram Bifurkasi dua dimensi Untuk kasus β1>0,β2<0 dan β1<0,β2>0 …...……… 12
Gambar 22 Diagram Bifurkasi dua dimensi untuk kasus β β1, 2=0 ………....……… 12
Gambar 23 Diagram Bifurkasi dua dimensi Untuk kasus β β1, 2>0 dan β β1, 2<0…………...…. 12
Gambar 24 Plot kasus β1<0,β2<0 dengan menggunakan Mathematica …...………….. 12
Gambar 25 Trayektori kasus β1<0,β2<0 dengan menggunakan Mapple……...……… 13
Gambar 26 Plot untuk kasus β1>0,β2>0 dengan menggunakan Mathematica ….…… 13
Gambar 27 Trayektori Kasus β1>0,β2>0 dengan menggunakan Mapple…………..….. 13
Gambar 28 Trayektori untuk H=0 …...……….. 15
Gambar 29 Trayektori untuk 2 1 / 4 H= −β β2
...
……….. 15Gambar 30 Trayektori fungsi sn
(
ζx k,)
dengan kondisi k<1 dan h>0 …...…………... 15Gambar 31 Trayektori fungsi cn
(
ζx k,)
dengan kondisi h<0 dan k>1...…………... 15Gambar 32 Trayektori fungsi cn
(
ζx k,)
dengan kondisi h>0 dan k<1.…...………... 16Gambar 33 Trayektori fungsi dn
(
ζx k,)
dengan kondisi h<0 dan k<1...……….... 16Gambar 34 Trayektori fungsi dn
(
ζx k,)
dengan kondisi h>0 dan k>1...………... 16Gambar 35 Plot Fungsi sn
(
ζx k,)
terhadap sumbu x dengan kondisi k<1 dan h>0... 17Gambar 36 Plot Fungsi cn
(
ζx k,)
terhadap sumbu x dengan kondisi h>0 dan k<1... 17Gambar 37 Plot Fungsi cn
(
ζx k,)
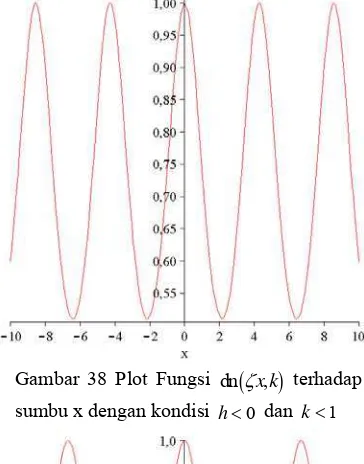
terhadap sumbu x dengan kondisi h<0 dan k>1... 17Gambar 38 Plot Fungsi dn
(
ζx k,)
terhadap sumbu x dengan kondisi h<0 dan k<1... 17Gambar 39 Plot Fungsi dn
(
ζx k,)
terhadap sumbu x dengan kondisi h>0 dan k>1... 17Gambar 40 Gabungan Trayektori untuk fungsi sn
(
ζx k,) (
, cn ζx k,)
, dan dn(
ζx,k)
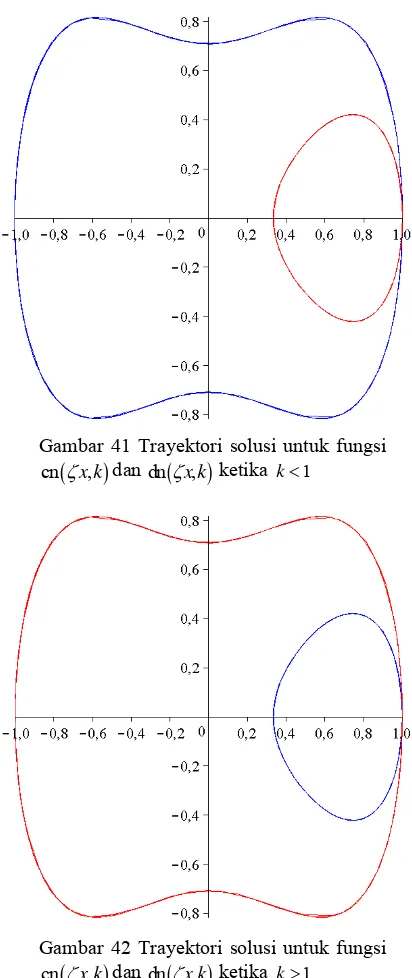
... 18Gambar 41 Trayektori solusi untuk fungsi cn
(
ζx k,)
dan dn(
ζx k,)
ketika k<1... 18DAFTAR LAMPIRAN
Halaman Lampiran 1 Diagram Alir Penelitian …...………. 22 Lampiran 2 Penurunan Eksak Solusi Soliton NLS Melalui Pendekatan Sistem Dinamik ... 23 Lampiran 3 Penurunan Eksak Solusi Soliton Sistem Optik Periodik
Melalui Pendekatan Analisis Sistem Dinamik Untuk F Sembarang……… 27 Lampiran 4 Integral Dan Fungsi Eliptik ...……… 32 Lampiran 5 Penurunan Eksak Solusi Soliton Sisitem Optik Periodik Melalui
PENDAHULUAN
1. Latar Belakang
Pada saat ini ternyata, banyak ilmuwan memandang bahwa Fisika Non Linier telah menjadi salah satu tonggak mendasar dalam memahami alam semesta. Padahal awalnya tidak ada yang menduga sifat-sifat non linier alam akan menghasilkan berbagai fenomena alam yang menarik. Para ilmuwan dahulu terkadang lebih senang melakukan linearisasi untuk permasalahan yang dihadapi dan selalu mengabaikan efek nonlinieritas ketika menganalisis suatu masalah sehingga tidak ada yang menyadari bahwa efek nonlinieritas akan memberikan keluaran yang jauh berbeda jika tidak diabaikan.
Soliton sebagai salah satu bagian riset fisika nonlinier sebenarnya sudah mulai diteliti sejak seratus lima puluh tahun yang lalu, tetapi baru sekitar empat puluh tahu belakangan ini benar-benar dikaji secara mendalam. Soliton sekarang telah diterima secara luas sebagai sebuah basis struktural untuk memandang dan memahami kelakuan dinamis dari sistem-sistem nonlinier yang begitu kompleks perumusannya.
Soliton adalah sebuah gelombang nonlinier yang memiliki sifat-sifat berikut yaitu terlokalisasi dan merambat tanpa perubahan bentuk dan kecepatan serta stabil melawan proses tumbukan dan akan mempertahankan identitasnya (bentuk). Sifat pertama merupakan kondisi gelombang soliter yang dikenal dalam hidrodinamika sejak abad ke-19. Sifat yang kedua berarti gelombang tersebut memiliki kelakuan sebagai partikel. Dalam fisika modern, akhiran “-on” biasanya digunakan untuk menunjukkan kelas partikel, misalnya fonon dan foton. Sifat soliton yang tampak sebagai partikel memang menjadi salah satu bahan yang menarik untuk dikaji akhir-akhir ini. Perhatikan ilustrasi gambar berikut.
Gambar 1 Ilustrasi Soliton
Kisah penemuan soliton sangatlah menarik dan penting untuk diketahui. Pengamatan pertama kali yang tervisualisasi dengan baik dilakukan pada 1844 oleh ilmuwan Skotlandia, John Scott-Russel [1]. Ia mengamati gerak sebuah perahu dari kudanya. Ketika perahu tiba-tiba berhenti, timbullah gelombang air dengan sebuah puncak yang bergerak menjauh dari perahu tersebut. Ia lalu mengamati gerak gelombang air tersebut dan terus mengikutinya hingga sekitar 2 mil. Gelombang air tersebut nyaris tidak berubah bentuk juga kecepatannya hingga nanti akhirnya menghilang dari pandangan karena masuk ke dalam terowongan air. Sehingga istilah “gelombang soliter” kemudian diberikan oleh Russel untuk gelombang air yang diamatinya itu.
Keberadaan dari intensitas optik non-difraksi yang terlokalisir dalam bentuk “Bright dan Dark” soliton spasial pada media nonlinier optik sebenarnya sudah dikaji dan dipelajari dalam kurun waktu 2 dekade sebelumnya[2]. Diantara yang telah dipelajari ada sebuah persamaan yaitu persamaan nonlinier Schroedinger (NLS), persamaan ini telah dibuktikan oleh Zakharov dan Shabat (Z-S) pada tahun 1972 melalui metode
hamburan balik (Inverse Scattering), dimana
persamaan tersebut memiliki solusi yang jumlahnya tidak berhingga (Unlimited), dalam pengertiannya bahwa setiap kondisi awal yang diberikan pasti memilki bentuk tertutupnya yang eksak.
Salah satu contoh perluasan lebih lanjut dari persamaan NLS untuk kasus perambatan gelombang cahaya dalam medium pandu gelombang planar dengan struktur periodik dalam arah rambat diberikan oleh persamaan yang akan dibahas pada skripsi ini yaitu persamaan Soliton spasial sistem Optik nonlinier yang bersifat periodik.
Berawal dari apa yang telah disampaikan sebelumnya, pada skripsi kali ini akan dipelajari bagaimana perilaku trayektori solusi soliton sistem optik periodik melalui pendekatan analisis sistem dinamik yang nantinya akan dipadu dengan fungsi Jacobian Eliptik, sehingga nantinya bisa dianalisa perilaku disekitar aliran trayektori.
(1)
(2)
(3)
(4)
(5)
(6) 2. Tujuan Penelitian
Untuk mengetahui perilaku solusi soliton periodik dengan cara menggunakan analisis sistem dianamik, dimana dengan mengetahui pola perilakunya, maka nantinya akan bisa diketahui perilaku disekitar trayektori yang ditunjukan oleh ketiga buah fungsi Jacobian Eliptik untuk persamaan soliton periodik.
TINJAUAN PUSTAKA
1. Soliton Dalam FisikaUntuk mengetahui soliton secara fisis ada beberapa pertanyaan yang mungkin sampai sekarang menggelayuti pikiran banyak orang yaitu bagaimana cara mengetahui sifat soliton secara analitik? Mengapa soliton dapat berkelakuan stabil layaknya sebuah partikel? Dan apakah soliton hanya sebuah fenomena spesifik dari persamaan Kdv saja?. Untuk menjawab ketiga pertanyaan tersebut akan dipaparkan secara bertahap beberapa langkah tambahan setelah Zabusky dan Kruskal melakukan perhitungan numeriknya.
Tinjau persamaan Kdv yang telah mengalami penskalaan pada variabel bebas dan variabel terikatnya:
6 0
t x xxx
u − u u +u =
dari teori gelombang dapat diketahui bahwa suku kedua dan ketiga masing-masing menyatakan efek nonlinier dan dispersi. Suku nonlinier menyebabkan sebuah perubahan kecuraman pada bentuk gelombangnya, sementara suku dispersi menyebabkan gelombang dapat menyebar. “Kompetisi” antara kedua suku tersebut menghasilkan bentuk gelombang stasioner yang dikenal sebagai gelombang soliter. Alasan lain mengapa setiap gelombang soliter bersifat stabil yaitu sifat persamaan Kdv yang memilki besaran konservatif.
Sifat dinamis dari sistem dibatasi oleh hukum kekekalan dari besaran tersebut. Besaran yang konservatif dapat menjamin parameter yang mengkarakterisasi soliton untuk tidak bergantung pada waktu sehingga soliton dapat bersifat stabil. Berdasarkan pada tak hingga banyaknya besaran
konservatif (variabel medan memiliki derajat kebebasan tak hingga), maka soliton dapat eksis dalam jumlah yang sembarang.
Sifat-sifat dasar soliton dapat diinvestigasi
dengan metode hamburan balik (inverse
Scattering method). Secara ringkas solusi persamaan Kdv yang diselesaikan dengan metode hamburan balik yaitu:
( )
, 2(
, ;)
u x t ∂ K x x t
x
= ∂
(
, ;)
(
;)
(
, ;) (
;)
0x
K x y t F x y t K x z t F z y t dz
−∞
dengan nilai fungsi dari:
+ + +
∫
+ =( )
2( )
0( )
( )
1
, 1 ;
2 , 0
N
n x ikx
n n
b k t
x t c t e e
a k
π ∞
−
= −∞
=
∫
+∫
F
dimana persamaan (3) merupakan persamaan Gelvan-Levitan. Secara khusus ketika koefisien refleksi r k
( ) ( ) ( )
, 0 =b k, 0 /a k, 0 bernilai nol (potensial tanpa refleksi, maka barulah dapat dipecahkan persamaan Gelvan Levitan dan nantinya dapat diperoleh solusi N-soliton yang terkait dengan N keadaan terikat. Dari pernyataan eksak solusi N-soliton, dapat dibuktikan bahwa soliton stabil melawan tumbukan sesamanya. Tumbukan tersebut akan selalu dalam keadaan berpasangan dan hanya menginduksi proses pergeseran posisi dari soliton[4].Permasalahan nilai awal dari persamaan Kdv akhirnya telah dapat diselesaikan pada masa itu. Dan lima tahun berikutnya (1972) dengan jalan mengembangkan metode hamburan balik, Zakharov dan Shabat [5] berhasil memecahkan persamaan nonlinier Schroedinger (NLS) yang berbentuk:
2
2 0
t xx
iψ ψ+ + ψ ψ =
2
6 0
t x xxx
u u u u
dan kemudian seorang ilmuwan bernama Wadati memecahkan persamaan Kdv yang termodifikasi [6,7], berikut persamaannya:
+ + =
dan akhirnya sampai sekarang lebih dari seratus persamaan soliton yang telah dikenal.
2. Analisa Sistem Dinamik.
(8)
(10)
( )
nn n n n
dx
x f x x
dt
= → ≡
Kemudian dalam membahas soal dinamika sistem akan dikenal istilah ruang-fasa, untuk bisa memberikan gambaran tersebut, maka tinjau kembali persamaan untuk kasus bandul sederhana yang terlinierisasi yang dituliskan:
Kemudian dalam membahas soal dinamika sistem akan dikenal istilah ruang-fasa, untuk bisa memberikan gambaran tersebut, maka tinjau kembali persamaan untuk kasus bandul sederhana yang terlinierisasi yang dituliskan:
0
x+ =x 0
x+ =x
(11)
(12)
(13)
(14)
(15) (9)
Dengan mendefinisikan
Dengan mendefinisikan
x
=
x
11 danx
=
x
2, maka persamaan (8) dapat dituliskan kembali dalam bentuk:1 2
x =x
2 1
x = −x
jelas terlihat bahwa melalui definisi ulang, persamaan (8) di atas berubah menjadi PDB orde satu seperti pada persamaan (7) dengan
. Dan perlu diingat bahwa solusi dari
persamaan (8) adalah sebuah solusi harmonik yang berdasarkan pada superposisi linier dari fungsi sinus dan kosinus, sehingga dengan demikian solusi bagi persamaan (9):
2 N=
1 sin
x = c t
2 cos
x = c t
dengan c adalah sebuah konstanta sembarang, dan selanjutnya atas dasar kenyataan berikut:
(
)
2 2 2 2
1 2 sin cos
x +x =c t+ t =c
)
maka jelaslah bahwa dalam bidang
(
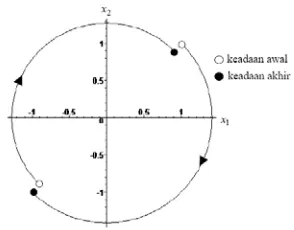
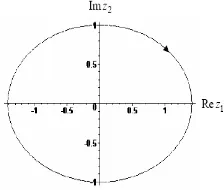
x x1, 2) (
≡ x x, kurva yang terbentuk adalahsebuah lingkaran dengan jari jari c.
Sebagaimana yang akan diberikan pada gambar 2.
Gambar 2 Kurva aliran Trayektori untuk Persamaan (11)
dan nantinya ada hal yang penting untuk perlu diingat bahwa trayektori-trayektori dalam sebuah ruang atau bidang fasa tidak pernah berpotongan, sebagaimana akan dicontohkan pada gambar 3, untuk dua keadaan awal yang berbeda, trayektori solusi yang arah alirannya ditunjukan melalui kepala panah, tidak pernah akan berpotongan. Hal ini berlaku umum untuk semua jenis PDB (9).
(7)
Gambar 3 Trayektori tidak akan pernah berpotongan untuk dua keadaan berbeda
Berikut akan ditinjau kembali persamaan (7) yang akan dituliskan dalam bentuk yang lebih eksplisit sebagai berikut:
(
)
(
)
1 1 1,...
1,...
N
N x
N N x
x f x
x f x
=
=
misalkan terdapat titik-titik
{
xn=xn,0}
yang nantinya akan mengakibatkan nilai dari fungsi(
1,0,..., ,0,..., ,0)
0n n N
f x x x = secara menyeluruh,
maka set titik titik tersebut dinamakan sebagai set titik kritis yang terkait dengan
{
xn=0}
.Berdasarkan kenyataan ini, sebuah titik kritis dalam ruang-fasa terkait dengan solusi stasioner dimana nilai x t
( )
=cn
untuk semua waktu dengan nilai c merupakan sebuah konstanta. Untuk mengetahui karakteristik dari titik-titik tersebut, dapat dilakukan dengan melakukan linierisasi sistem persamaan terkait, yakni dengan melakukan ekspansi Taylor terhadap fungsi f di sekitar xn =xn,0
(
)
hingga orde pertama saja:
,0
,0 1
....
n N
n
n n n x x
n n
f
x x x
x =
=
∂
= − +
∂
∑
(
1, 2,..)
T N
X =AX →X ≡ X X X
.
Kemudian, dengan memanfaatkan secara lebih mendalam linierisasi persamaan (12) dalam hal menentukan karakter dari suatu titik kritis secara lebih umum, berikut akan dituliskan kembali persamaan (13) ke dalam bentuk persamaan matriks berikut:
1 1
1
1
N
N N
N
f f
X X
A
f f
X X
∂ ∂
⎛ ⎞
⎜∂ ∂ ⎟
⎜ ⎟
⎜ ⎟
≡
⎜∂ ∂ ⎟
⎜ ⎟
⎜∂ ∂ ⎟
⎝ ⎠
,0
n n n
X x x
di sini = − yang menunjukan bahwa
(16)
A adalah matriks yang diasumsikan
sebagai matriks non-singular yakni: N×N
detA≠0
Untuk menganalisa karakteristik dari titik kritis terkait, maka tentukan terlebih dahulu persoalan harga eigen bagi matriksA:
(17)
(18)
AX =λX
dengan λ merupakan harga eigen terkait yang dapat diperoleh dengan cara memecahkan persamaan karakteristik berikut ini:
(
A−λI)
=0det
Dengan demikian, dapat diperoleh empat buah jenis titik kritis berdasarkan harga eigennya yaitu Titik Node, Titik Sadel, Titik Center dan Titik Fokus. Untuk titik Node nilai eigennya berharga riil. Pada kasus λ λ1, 2>0 akan diperlihatkan pada gambar 4 dimana titik Node tersebut beratraktor negatif yang artinya aliran trayektori menjauhi titik kritis. Namun ketika λ λ1, 2<0 titik Node tersebut akan beratraktor positif, yang artinya aliran trayektori akan menuju ke arah titik kritis sebagaimana ditunjukan pada gambar 5.
Gambar 4 Titik Node atraktor negatif
Gambar 5 Titik Node atraktor positif
dan diagram harga eigen untuk kasus titik Node ini diberikan oleh gambar 6a dan 6b masing-masing untuk kasus atraktor negatif dan positif berturut-turut.
Gambar 6 Diagram harga Eigen untuk kasus titik Node
Kemudian untuk titik kritis jenis yang kedua yaitu titik Sadel memilki harga eigen yang bernilai riil pula, bedanya dengan titik Node, titik Sadel nilai eigennya berkondisikan nilai eigen yang berlawanan tanda
1 0, 2 0
λ < λ > atau sebaliknya. Berikut ini
adalah bentuk trayektorinya.
Gambar 7 Aliran Trayektori titik Sadel
dan diagram harga eigen yang terkait pada gambar 7 akan diberikan pada gambar 8.
Gambar 8 Diagram harga Eigen untuk kasus titik Sadel
untuk jenis titik kritis yang ketiga yaitu titik Center ternyata memilki nilai eigen yang berbeda dari dua titik kritis sebelumnya yaitu nilai eigen yang imajiner. Dengan begitu, trayektori yang terkait titik Center ini bisa diilustrasikan pada gambar 9.
Gambar 9 Aliran Trayektori titik Center
sedangkan untuk diagram harga eigennya diberikan dalam gambar 10.
Berikutnya, untuk jenis titik kritis yang terakhir yaitu titik Fokus ternyata memiliki nilai eigen yang merupakan bilangan kompleks, yaitu bilangan yang terdiri atas fungsi riil dan imajiner. Untuk kasus μ>0 titik Fokus tersebut memilki atraktor negatif,
sedangkan untuk kasus μ<0 titik Fokus
tersebut memilki atraktor positif, untuk memahaminya perhatikan ilustrasi gambar 11 dan gambar 12 berikut.
Gambar 11 Titik Fokus atraktor negatif
Gambar 12 Titik Fokus atraktor positif
Setelah membahas mengenai titik kritis, dalam pembahasan dinamik sistem juga dikenal istilah bifurkasi. Bifurkasi adalah proses perubahan jumlah titik kritis serta jenisnya akibat perubahan parameter yang terkandung di dalam suatu sistem persamaan. Secara umum bifurkasi pada dinamik sistem ada banyak jenisnya, namun untuk kali ini akan dibahas empat buah kasus bifurkasi yang paling sering ditemui dan tergolong dalam kasus bifurkasi lokal. Bifurkasi yang pertama disebut bifurkasi Sadel-Node. Bifurkasi jenis ini dicirikan oleh munculnya dua atau lebih titik kritis. Berikut ilustrasi dari diagram bifurkasinya untuk kasus satu dimensi.
Gambar 13 Diagram Bifurkasi Sadel-Node
untuk bifurkasi jenis kedua yaitu bifurkasi Trans-Kritikal. Pada bifurkasi ini jumlah titik kritis yang terlibat dalam proses tetap namun hanya mengakibatkan pertukaran karakteristik kestabilannya saja. Untuk memahaminya perhatikan ilustrasi pada gambar 14.
Gambar 14 Diagram Bifurkasi untuk kasus Bifurkasi Trans-Kritikal
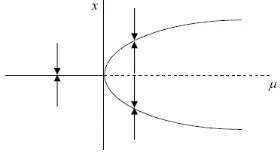
dan untuk bifurkasi jenis berikutnya disebut bifurkasi Pitch-Fork. Bifurkasi ini dicirikan lewat bertambahnya titik kritis dari satu menjadi tiga buah, dimana untuk titik kritis yang telah ada sebelumnya berubah karakteristik kestabilannya dari stabil menjadi tidak stabil, sedangkan untuk titik kritis yang baru bersifat stabil. Untuk memahaminya perhatikan ilustrasi pada gambar 15.
Gambar 15 Diagram Bifurkasi Pitch-Fork
Kemudian untuk bifurkasi jenis terkahir disebut bifurkasi Poincare-Andronov-Hopf. Pada bifurkasi ini persamaan PDB yang ditinjau merupakan persamaan PDB dua dimensi, namun karena cukup kompleks persamaan tersebut jika direpresentasikan dalam koordinat cartesian, maka dilakukan transformasi koordinat dari cartesian menuju polar agar PDB yang nanti akan diselesaikan jauh lebih sederhana dari sebelumnya.
( )
(19) (20) (21) (22) (23) (24) (25) (26) (27) (28) Gambar 16 Pola Trayektori BifurkasiPoincare Andronov Hopf (Bifurkasi Hopf)
dapat dilihat pada gambar ketika kasus μ>0 muncul sebuah Limit Cycle disana. Hal ini terjadi karena perubahan kestabilan titik Fokus saat μ<0 yang beratraktor positif menjadi beratraktor negatif padaμ>0
Perlu ditekankan disini bahwa keempat bifurkasi yang dibahas sebelumnya merupakan bifurkasi lokal, yakni bifurkasi yang dapat dilihat hanya dengan meninjau perubahan kelakuan aliran trayektori di sekitar titik kritis.
3. Solusi Satu Soliton Persamaan NLS Pada awal pembahasan mengenai kehadiran soliton optik, akan ditinjau sebuah persamaan perambatan pulsa elektromagnetik dalam serat optik. Dalam hal ini perambatan pulsa yang dimaksud melalui medium dielektrik. Yaitu sebuah medium yang jika dirambati oleh cahaya dengan intensitas tinggi akan menunjukan sebuah hubungan antara indeks bias terhadap intensitas cahaya. Medium dengan perilaku seperti itu dikenal sebagai medium kerr.
Persamaan gelombang yang terkait dengan perambatan pulsa dalam serat optik lazim disebut persamaan Schrodinger nonlinier (NLS) yang dapat dituliskan dalam bentuk umum sebagai berikut[3]:
2
2
2 0
E E
i E E
z
β
tσ
∂ − ∂ + =
∂ ∂
dimana nilai E merupakan medan selubung
dari pulsa listrik, kemudian nilai 2
2
d dk
ω β∼
merupakan parameter yang terkait dengan dispersi dari kecepatan grup dan nilai σ χ∼ ( )3
terkait dengan suseptibilitas orde tiga dari medium yang dilalaui.
Berikut ini akan dicari solusi bagi persamaan (19) dalam bentuk:
( ) ( )
, i zE z t =u t eκ
dengan u t merupakan fungsi riil. Kemudian
substitusikan persamaan (20) ke dalam persamaan (19) dan menghasilkan:
2 3 2 0 u u u t
κ
β
∂σ
− − + = ∂selanjutnya kalikan persamaan (21) dengan sehingga: / du dt 2 3 2 0
du d u du du
u u
dt dt dt dt
κ
β
σ
− − + =
persamaan (22) dapat dituliskan kembali dalam bentuk: 2 2 4 1 0 2 2 d du u u dt dt σ κ β ⎡ ⎛ ⎞ ⎤ − − + = ⎢ ⎜ ⎟ ⎥ ⎝ ⎠ ⎢ ⎥ ⎣ ⎦
yang mengindikasikan bahwa:
2
2 4
2
du
u u c
dt
σ
κ
β
⎛ ⎞− − ⎜ ⎟ + =
⎝ ⎠
dimana nilai c merupakan sebuah konstanta. Selanjutnya untuk bisa memperoleh solusinya maka dengan membatasi diri pada solusi yang
memilki kondisi du 0
dt →
0 u→ t→ ±∞
dan pada
sehingga berakibat nilai c pada ruas kanan bernilai nol. Dari sini persamaan (24) dapat diatur kembali menjadi:
2 2 4 1 2 du u u dt
σ
κ
β
⎛ ⎞ = ⎡− + ⎤ ⎜ ⎟ ⎢ ⎥ ⎝ ⎠ ⎣ ⎦ 2 2 2 du dt u u κ β σ σ = − +untuk menyelesaikan persamaan (26) pada ruas kiri akan dilakukan pemisalan fungsi
2 / sin
u= κ σ ψ dan du= 2 /κ σ cosψ ψd ,
sehingga ruas kiri persamaan (26) dalam variabel ψ menjadi:
2 2 / sin
2 / du d u u ψ κ σ ψ κ σ → − − +
kemudian integralkan hasil yang diperoleh terhadap variabel ψ:
2 / sin
dψ
κ σ ψ =
−
∫
1 1 cos
ln sin sin 2 / ψ ψ ψ κ σ ⎛ − ⎞ ⎜ ⎟ − ⎝ ⎠
(29) (30) (31) (32) (33) (34) (35a) (35b) (36a) (36b) (37a) (37b) 2 4 1 1 1
2 4 2
H u u 2
2 u
κ σ
β
= − + + (38)
1 1 cos
ln sin sin 2 / ψ ψ ψ κ σ ⎛ ⎞ − = ⎜ ⎟ − ⎝ ⎠ 2
1 1 1 / 2
ln 2 /
2 / u u σ κ κ σ κ σ ⎡ ⎛ − − ⎞⎤ ⎢ ⎜⎜ ⎟⎟⎥ − ⎢⎣⎢⎣ ⎝⎝ ⎠⎠⎥⎦⎥⎦
sedangkan integral ruas kanan persamaan (26) didapatkan:
sedangkan integral ruas kanan persamaan (26) didapatkan:
2 / 2 /
dt t
β σ = β
∫
σdengan demikian persamaan yang harus dipecahkan adalah:
2
1 1 / 2
ln 2 / u / t
u σ κ κ σ κ β ⎡ ⎛ − − ⎞⎤ ⎢ ⎜⎜ ⎟⎟⎥ = − ⎢ ⎝ ⎠⎥ ⎣ ⎦
( )
sehingga nantinya nilai u menjadi:
(
)
(
)
2 2 / exp /
1 exp 2 /
t u t t κ σ κ β κ β − = + −
( )
dan nantinya bentuk persamaan (32) dapat diubah menjadi bentuk fungsi trigonometri berikut:
(
)
2 / sech /
u t = κ σ −κ β t
( )
sehingga akhirnya solusi dari persamaan NLS dalam bentuk persamaan (20) yang diinginkan dapat dituliskan sebagai berikut:
(
)
, 2 / sech / i z
E z t = κ σ −κ β t eκ
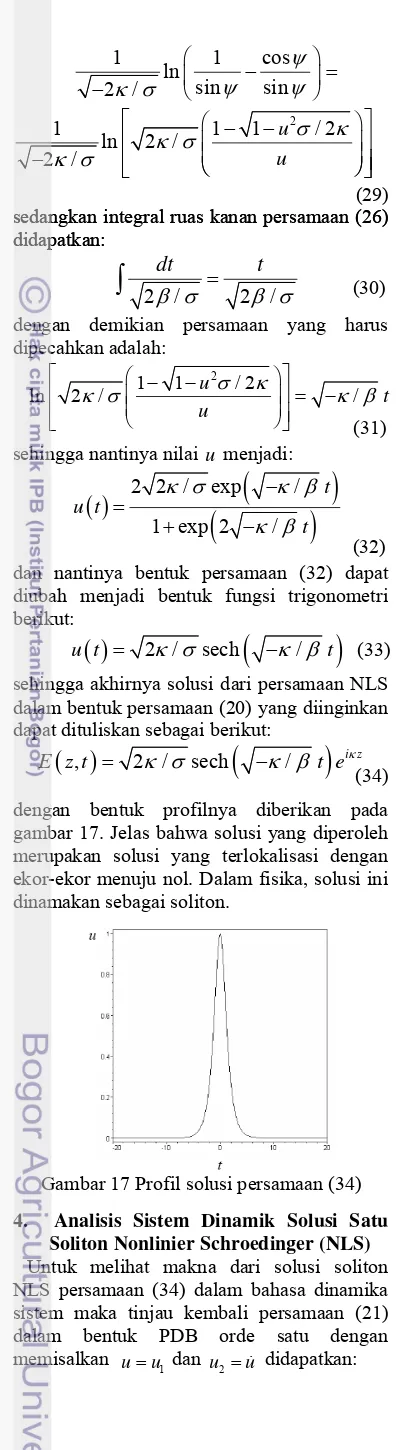
dengan bentuk profilnya diberikan pada gambar 17. Jelas bahwa solusi yang diperoleh merupakan solusi yang terlokalisasi dengan ekor-ekor menuju nol. Dalam fisika, solusi ini dinamakan sebagai soliton.
Gambar 17 Profil solusi persamaan (34)
4. Analisis Sistem Dinamik Solusi Satu
Soliton Nonlinier Schroedinger (NLS) Untuk melihat makna dari solusi soliton NLS persamaan (34) dalam bahasa dinamika sistem maka tinjau kembali persamaan (21) dalam bentuk PDB orde satu dengan memisalkan u=u1 dan u2=u didapatkan:
2 1 u u
β
= 32 1 1
u u u
κ
σ
= − +
1 0, 2 0
u u
jelas terlihat bahwa titik-titik kritis untuk sistem persamaan (35) adalah:
= =
1 , 2 0
u
κ
uσ
= ± =
dan harga eigen yang terkait dengan masing-masing titik kritis diberikan oleh penyelesaian dari konstruksi matriks Jacobian, dan hasil yang didapat: 1
κ
λ
=β
± − 2 2κ
λ
= ± 0β
untuk kasus β< dan dapat dengan
mudah disimpulkan bahwa titik kritis (36a) merupakan sebuah titik Sadel, sedangkan titik kritis (36b) merupakan titik Center. Sebelum meninjau bentuk trayektori solusi berdasarkan proses linierisasi, perlu disadari bahwa sistem persamaan (35) membentuk suatu sistem Hamiltonian dengan fungsi Hamiltonian terkait diberikan oleh:
0
κ>
1 / 2
u H u
dimana persamaan (35) memenuhi persamaan
kanonik = ∂ ∂ dan u2= −∂H/∂u1.
Mengingat pada titik
( )
0, 00 H
merupakan titik
Sadel, maka nilai Hamiltonian untuk trayektori yang terkait dengan titik tersebut
adalah = . Dengan demikian, sambil
memeperhatikan kenyataan bahwa terdapat dua buah titik Center dan sebuah titik Sadel di titik asal, maka bentuk trayektori yang dimaksud adalah Seperti yang diilustrasikan pada gambar 18 berikut.
Gambar 18 Pola Trayektori untuk kasus 0
< dan κ 0
β >
0
=
0
dan sesuai pula dengan
persamaan (38) untuk kasus H
(41) (42) (43) (44) (45) (46)
( )
2 2 sech tanhu t κ β κ t κ t
σ β β ⎡ ⎛ ⎞ ⎛ ⎞⎤ = − − ⎢ ⎜⎜ − ⎟⎟ ⎜⎜ − ⎟⎟⎥ ⎢ ⎝ ⎠ ⎝ ⎠⎥ ⎣ ⎦ (39)
( )
( )
1 2 sechu t u t κ κ t
σ β
⎛ ⎞
= = ⎜⎜ − ⎟⎟
⎝ ⎠
titik kritis (36a) merupakan sebuah titik Center, sedangkan untuk titik kritis (36b) merupakan titik Sadel.
(
)
(40) Berdasarkan persamaan (35) diketahui bahwa:
dengan menggunakan aplikasi Mapple, dapat diperlihatkan bahwa untuk rentang −∞ < < ∞t maka diperoleh dalam gambar 19, pola trayektori dari persamaan (39) yang dikombinasikan dengan:
secara implisit dalam bidang
(
u t u t1( ) ( )
, 2)
1
u
.
Terlihat bahwa kombinasi tersebut cocok dengan trayektori dari hamiltonian dengan
pada bagian kurva tertutup bagian
kanan. Kurva tertutup bagian kiri dari gambar
19 terkait dengan solusi , dimana
berdasarkan transformasi ini persamaan (35) merupakan persamaan yang invarian.
0 H=
1
u → −
Gambar 19 Pola aliran Trayektori persamaan (39) yang dikombinasikan dengan persamaan (40)
Namun, jika kembali mengacu pada persamaan (34) dapat dengan mudah dilihat bahwa agar persamaan tersebut terkait dengan suseptibilitas orde tiga dimana σ>0 maka kondisi yang harus dipenuhi adalah ketika
0
β<
0
dan agar fungsi
u
merupakanfungsi riil. Kondisi perambatan dengan nilai 0
κ>
β< secara teoritis terkait dengan sebuah
keadaan dispersi anomali.
5. Integral dan Fungsi Eliptik
Untuk memahami permasalahan ini, berikut akan ditunjukan sebuah bentuk integral yang sering dijumpai dalam permasalahan Fisika seperti pada kasus bandul sederhana yaitu: 2 2 0 , 1 sin d F k k ϕ ϕ ϕ = −
∫
(
)
ϕintegral pada persamaan (41) dinamakan sebagai integral eliptik jenis pertama dan:
2 2
0
, 1 sin
E k k d
ϕ
ϕ =
∫
− ϕ ϕ0 k 1
dikenal sebagai integral eliptik jenis kedua.
Dimana nilai k berada pada rentang nilai
≤ ≤ . Nilai k pada persamaan tersebut
merupakan sebuah modulus dan ϕ merupakan
sebuah amplitudo dari integral eliptik pada persamaan (41) dan (42).
Integral eliptik dinamakan sebagai integral eliptik lengkap jika amplitudo pada persamaan bernilai ϕ=π
2
. Integral pada persamaan (41)
dan (42) merupakan integral eliptik versi
Legendre. Melalui transformasi: x=sinϕ
dengan nilai
2
1 dx dϕ=
x
−
, sehingga diperoleh
bentuk lain sebagai berikut yaitu[8,9,13]:
( )
(
2)(
2 2)
0,
1 1
x
dx
F x k
x k x
=
− −
∫
( )
2220 1 , 1 x k x
E x k dx
x − = −
∫
0yang dinamakan integral eliptik versi Jacobi. Bentuk integral eliptik baik dalam versi Legendre maupun Jacobi tidak dapat secara umum dievaluasi secara analitik. Nilai-nilainya untuk amplitudo tertentu disediakan dalam bentuk tabel yang diperoleh secara numerik. Tinjau bentuk integral eliptik Jacobi
(43). Jika diambil k= maka dapat dengan
mudah diperoleh: 1 2 0 sin 1 x dx u x x − = = −
∫
( )
dimana u≡F x, 0
sinu x
, jika dilakukan inversi terhadap persamaan (45) maka diperoleh hasil
= . Dengan memperluas cara pandang
untuk kasus k≠0 dan dengan mendefinisikan
secara umum nilai ≡
( )
x k,(
)(
)
u F , maka serupa
dengan persamaan (45) dapat dituliskan bentuk bagi sembarang integral eliptik terkait:
1
2 2 2
0 sn 1 1 x dx u x
x k x
−
= =
− −
∫
snu x
dan serupa pula dengan persamaan (45), invers dari persamaan (46) adalah
sinϕ. Dimana secara lebih khusus
(47)
(48)
(49)
(50) (51)
(52)
(53)
fungsi dikenal dalam matematik sebagai
fungsi eliptik Jacobi[8,9,13]. snu
Mirip dengan fungsi trigonometrik, dapat
pula didefinisikan fungsi eliptik Jacobi cn
melalui hubungan:
u
(54)
2
cnu= 1 sn− u =cosϕ
kemudian tinjau kembali integral eliptik versi Legendre pada persamaan (41), jelas terlihat:
2 2
1
1 sin
du
dϕ = −k ϕ
dan berdasarkan hubungan (48) dapat pula
didefinisikan fungsi melalui perumusan
berikut ini yaitu:
dnu
2 2
dnu d 1 k sn u
du
ϕ
= = −
dengan demikian, jelas bahwa fungsi fungsi tersebut memenuhi hubungan:
2 2
cn u+sn u=1
2 2 2
dn u+k sn u=1
kemudian, untuk mengetahui turunan pertama bagi masing-masing fungsi terhadap variabel
, maka diperoleh hasil sebagai berikut:
u
(
sn)
(
sin)
d u d
du du
ϕ
= =
cos d cn dnu u
du
ϕ
ϕ =
(
cn)
(
cos)
d u d
du du
ϕ
= =
sin d sn dnu u
du
ϕ ϕ
− = −
(
dn)
(
21 sin
d u d
k
du =du − ϕ
)
=2
2
2
sin cos
sn cn
1 sin
k d
k u u
du k
ϕ ϕ ϕ
ϕ
− = −
−
METODE PENELITIAN
1. Waktu dan Tempat Penelitian
Penelitian ini dilaksanakan pada bulan Februari 2009 sampai dengan bulan Desember 2009. Dan tempat penelitian dilakukan di Laboratorium Fisika Teori dan Komputasi Departemen Fisika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor (IPB).
2. Peralatan
Pada penelitian kali ini alat yang digunakan berupa laptop milik pribadi dengan processor Intel (R) Core (TM) 2 Duo CPU
dengan memory 2GB dan menggunakan Windows Vista Home Basic. Lalu pada penelitian ini juga menggunakan bantuan Software Mapple 11 dan Mathematica 7.
3. Metode Penelitian 3.1 Studi Pustaka
Pada penelitian ini studi pustaka dimulai dari pemecahan solusi satu persamaan NLS melalui pendekatan analisis sistem dinamik. Kemudian dengan proses yang sama maka persamaan modus tergandeng yang didapatkan dari perluasan persamaan NLS dapat diselesaikan secara eksak pula. Dan dengan bantuan ketiga fungsi eliptik, maka dapat diketahui perilaku trayektori solusinya dalam bidang fasa.
3.2 Penurunan Solusi Secara Eksak
Proses ini dilakuakan untuk mengetahui perilaku persamaan 55 dan 56 secara analitik, melalui pendekatan sistem dinamik.
3.3 Analisa Solusi Dengan Mapple 11 dan Mathematica 7
Proses ini dilakukan untuk menganalisis hasil visualisasi gambar trayektori solusi yang didapatkan oleh kedua software yang digunakan. Sebenarnya dalam menunjukan bentuk trayektori solusi beserta aliran trayektorinya akan lebih baik menggunakan software Mathematica, namun dalam teknis pengerjaannya lebih mudah dikerjakan pada software Mapple, karena dalam Mapple sintaks yang digunakan lebih sederhana. Berbeda sekali dengan software Mathematica yang menggunakan algoritma pemrograman. Namun demikian hasil gambar yang diperoleh akan sama saja bentuknya, perbedaanya hanya dari segi tampilannya saja.
HASIL DAN PEMBAHASAN
1. Solusi Eksak Soliton Optik NonlinierMelalui Metode Sistem Dinamik
2 * * 2 2
ˆ
f f f N b N f b N f b
P U −ηU +c U +b U U +b U U
(
2 2)
(
2)
0 f 2 b f N b 2 f b 0
b U U U b U U U
+ + + + =
2 * * 2
2
ˆ
b b b N f N b f N b f
2
PU −ηU +c U +b U U +b U U
(
2 2)
(
2 2)
0 b 2 f b N f 2 b f 0
b U U U b U U U
+ + + + = (55) (56) (57) (58)
(
)
2 2 N d FAD K A c B F
dx −⎡⎣η− − ⎤⎦
(
2 2)
(
2 2)
2 30 2 N 3 2N 0
b A A B b B A B b AB F
⎡ ⎤ +⎣ + + + + ⎦ =
(
)
2 2 N d FBD K B c A F
dx −⎡⎣η+ − ⎤⎦
(
2 2)
(
2 2)
2 30 2 N 3 2N 0
b B A B b A A B b BA F
⎡ ⎤
+⎣ + + + + ⎦ =
(59)
(60)
(
K A c B F)
N(
K B)
c A FNAD BD η η ⎡ − − ⎤ ⎡ + − ⎤ ⎣ ⎦ =⎣ ⎦ 2 2 2 N
A B c
K AB ⎡ − ⎤ ⎣ ⎦ = (61) (62)
[
]
[
]
2 20 2 0 2 4
2
N N N
N
A b b A b b b
b ± ⎡ ⎤ − + ± ⎣ + − ⎦ = B istilah difraksi yang telah diperkenalkan
sebelumnya dalam model. berikut ini akan ditinjau model persamaan diferensial parsial yang terkopel, berikut persamaannya[11]:
(
)
(
)
(
)
(
)
2 2 2 2 2 3
0 2
2 2 2 2 2 3
0 2
2 3
2 3
N N
N N
b A A B b B A B b AB F
AD
b B A B b A A B b BA F
BD ⎡ + + + + ⎤ ⎣ ⎦ ⎡ + + + + ⎤ ⎣ ⎦ = (63) (64)
[
]
2 20 2N 4 N
b b b
⎡ + − ⎤= Γ
⎣ ⎦ (65)
[
0 2]
2 N N b b B A b ±= ⎨⎧⎪− + ± Γ⎫⎪ ± ⎬ ⎪ ⎪
⎩ ⎭ (66)
[
0 2]
2 N N b b b α±=⎡⎢− + ± Γ⎤⎥ ⎢ ⎥ ⎣ ⎦ (67) persamaan (55) dan (56) merupakan set
persamaan diferensial parsial yang terkopel,
pada persamaan tersebut nilai ˆ
f
P dan
merupakan operator persamaan diferensial yang didefinisikan oleh sebuah persamaan
dan sebuah persamaan
, dengan parameter x dan z yang mengimplikasikan keadaan transversal dan longitudinal pada sistem koordinat masing-masing. Sementara itu
parameter yang dirumuskan sebagai
ˆ b P 2 ˆ / / f
P = ∂ ∂ + ∂ ∂i z D x
2
ˆ /
b
P = − ∂ ∂ + ∂ ∂i z D
D / 2 2 2 / x B
D=k Nk menunjukan kekuatan dari efek
difraksi yang timbul. Sedangkan parameter η
merupakan frekuensi spasial yang dirumuskan sebagai η=k Nk/ B 1
N
c
− . Kemudian parameter
adalah parameter yang nilainya sebanding
dengan besarnya komponen Fourier N−th
berdasarkan fungsi suseptibilitas linier. Sedangkan parameter nonlinier
mempunyai nilai sebanding dengan nilai
yang merupakan
komponen Fourier gabungan dari fungsi suseptibilitas nonlinier.
0, N, dan b2N
b b
0−th,N−th, dan 2N−th
Untuk menyelesaikan persamaan (55) dan persamaan (56), maka akan diperkenalkan sebuah fungsi Ansatz yakni:
( )
iK zf fU =AF x e
iK z
−
( )
bb
U =BF x e
Dimana F merupakan fungsi real, sedangkan untuk A B, , dan Kf b( ) merupakan parameter
yang konstan. Untuk menemukan dua buah set persamaan diferensial biasa orde dua, misal dengan menggunakan hubungan
b f
K =K ternyata didapatkan solusi yang trivial artinya
nilai akibatnya jika
menggunakan hubungan tersebut maka penyelesaian persamaan diferensial yang didapatkan akan bernilai nol. Untuk
menghindari hal tersebut gunakan hubungan
berikutnya yaitu , ternyata
persamaan (55) dan (56) memilki solusi yang non-trivial[12], dengan memasukan hubungan tersebut ke persamaan fungsi Ansatz (57) dan (58) lalu masukan ke persamaan (55) dan (56)
an hasil:
2
n bN=0 0, 0, da
N N
c = b =
b f
K = −K =K
maka didapatk F 3 F
Dari kedua persamaan tersebut, maka akan direduksi sehingga hanya menghasilkan sebuah persamaan diferensial biasa orde dua. Caranya dengan menyamakan kedua persamaan tersebut berdasarkan order fungsinya masing-masing. Ketika fungsi
berorder disamakan didapatkan hubungan
Sedangkan ketika fungsi berorder didapatkan sebuah hubungan:
pada persamaan (64) untuk bagian yang berada dalam fungsi akar bisa didefinisikan sebagai berikut:
sehingga persamaan (64) bisa dituliskan menjadi sebagai berikut:
1 2 F =F
3
2 1 1 2 1
F =βF −β F
(76)
(77)
B±=α±A± (68)
(
2)
(
3)
2 2 30 1 2 N 3 2N
b b b A F
D
α α± α α
⎡ + + + + ⎤
⎣ ⎦
(69)
(
2)
(
3)
0 2
2
1 2 N 3 N
b b b
D
α α α α
β
±
⎡ + + + + 2 A2
⎣ = ⎤⎦ (70) 2 1 2 N c K α α± ⎡ − ⎤ ⎣ ⎦ = (71)
(
2)
2 1 2 N c F D αη α α± ⎡ − +⎡⎣ ⎤⎦ ⎤
⎣ ⎦ (72)
(
2)
1 2 1 2 N c D αη α β α± ⎡ − +⎡⎣ ⎤⎦ ⎤ ⎣
= ⎦ (73)
2 3 1 2 2 0 d F F F
dx −β +β = (74)
1 0 F = 1 1 F 2 β β = ± (78) (79) 1 0
F=βF→λ =β1 (80)
1 1,2 1
2 F 2
F = − β →λ = − β (81)
sehingga persamaan (66) akan terlihat menjadi sebuah persamaan yang cukup sederhana yaitu: 2 3 2 2 1 1 1 0 d F F F dx β β β
− + + = (75)
setelah mendapatkan persamaan (68), maka substitusikan persamaan (68) ke persamaan
(59) untuk order fungsi F3 saja. Sehingga
akan didapatkan persamaan sebagai berikut:
berdasarkan persamaan (69), akan dimisalkan sebuah parameter β2 yang dirumuskan:
kemudian substitusikan persamaan (68) ke persamaan (62) maka akan didapatkan:
setelah itu substitusikan persamaan (71) ke
persamaan (59) untuk order fungsi saja.
Sehingga akan didapatkan persamaan: F
dan berdasarkan persamaan (72), akan dimisalkan sebuah parameter
1
β yang
dirumuskan sebagai berikut:
dengan demikian PDB orde dua yang didapatkan dan nantinya akan dianalisa secara sistem dinamik yaitu:
dengan mengatur kembali persamaan (74) akan didapatkan persamaan:
dimana nilai
1
1/ β dapat dipandang sebagai
“effective diffraction strength”, sedangkan nilai
2/ 1
β β dapat dipandang sebagai
“effective cubic nonlinier coeffisient” atau disebut juga suseptibilitas orde ketiga χ( )3
. Kemudian dengan memisalkan F=F1 dan
2
F F
•
= akan didapatkan sebuah aan
diferensial biasa orde satu yaitu:
bifurkasi apa yang terjadi, coba tinjau persamaan
Be rkan persamaan (77) didapatkan
tik kritis yaitu:
Dari kedua titik itis tersebut,
engan mudah dibuktikan bahwa untuk kas
1 0, 2 0 dan 1 0, 2 0
set persam
Setelah itu untuk mengetahui proses
(77). set rdasa ti dapat kr d us
β < β > β > β < hanya ter
atu
dapat
s buah titik kritis yaitu F1=0 dengan
persamaan linier yang terkait diberikan oleh:
dengan λ0=β1, sedangkan k kasus
1 0, 2 0 dan 1 0, 2 0
untu
β < β < β > β > terdapat tiga buah
titik kritis yaitu F1=0 dan 1 1 2 F β β = ± an oleh: untuk den
persamaan liniernya diberik
gan 1 1 2 F β β
= ± denganλ1,2= −2β1dan untuk
1 0 dengan 0 1
F = λ =β memilki persam
ma denga aan (80).
dasarkan aan (80
kondisi 0 d
aan
yang sa n persam
Ber persam ), untuk
1 0, 2 an 1 0, 2 0
β < β > β > β
kondisi < titik kritis yang terkait merupakan titik Sadel yang bersifat stabil. Sedangkan untuk
1 0, 2 0 dan 1 0, 2 0
β < β < β > β > titik Sadel
tersebut b di lain
pihak untuk titik kritis
ersifat tidak stabil, tetapi
1 1 F 2 β β
= ± berdasarkan
persamaan (81) keduanya bersifat stabil. Berikut ilustrasi diagram bifurkasinya untuk satu dimensi:
ambar 20 Diagram Bifurkasi satu dimensi untuk Persamaan (77)
edangkan untuk diagram bifurkasi dua di ensi dibagi tiga kondisi yakni untuk nilai
1 G s m 2 0, 0
β > β < lalu β β1, 2=0 dan yang terakhir F
0 1
F F ⎛ ⎞
⎝ ⎠
1 2
2
1 2 1
2 2 3 0
A A
F
f f
F F
β β
⎜ ⎟
= → = ⎜ ⎟
⎜∂ ∂ ⎟ ⎝ − ⎠
⎜ ⎟
1 2 (82)
1 0, 2 0
F = F =
1
1 2
2
, 0
F F
β β
= ± =
(83)
(84)
1 1
λ = ± β
2 2 1
λ = ± − β
(85)
(86)
1 1
λ = ± −β
2 2 1
λ = ± β
(87)
(88)
-4 -2 0 2 4
-4
-2
0 2 4
F1HtL
F2
H
t
L
Plot Bidang Fase
F1
F2
F1
F2
F1
F2
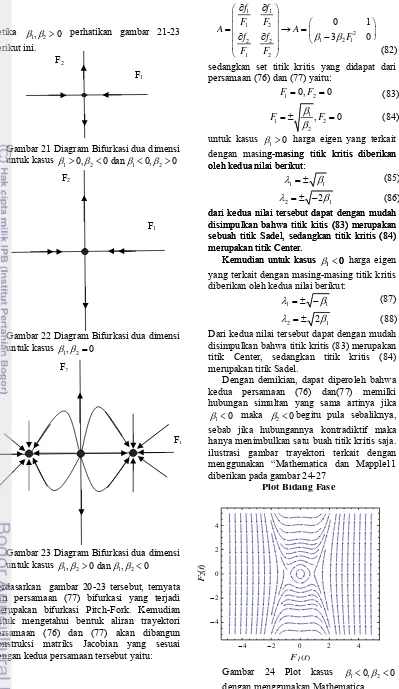
ketika β β1, 2>0 perhatikan gambar 21-23 berikut ini.
ambar 21 Diagram Bifurkasi dua dimensi
ntuk kasus 1 0, 2 0 dan 1 0, 2 0
G
u β > β < β < β >
Gambar 22 Diagram Bifurkasi dua dimensi untuk kasus β β1, 2=0
Gambar 23 Diagram Bifurkasi dua dimensi
untuk kasus 0
1, 2 0 dan 1, 2 β β > β β <
er dari
me rkasi Pitch-Fork. Kemudian
edangkan set titik kritis yang didapat dari ersamaan (76) dan (77) yaitu:
b dasarkan gambar 20-23 tersebut, ternyata persamaan (77) bifurkasi yang terjadi rupakan bifu
untuk mengetahui bentuk aliran trayektori persamaan (76) dan (77) akan dibangun konstruksi matriks Jacobian yang sesuai dengan kedua persamaan tersebut yaitu:
s p
untuk kasus β1>0 harga eigen yang terkait
ngan masing- titik kritis diber
eh kedua nilai berikut:
itis (83) merupakan
ebuah titik Sade titik kritis (
erupakan titik
Kemudian unt 0
g- titik kritis diber
eh kedua nilai berikut:
itis (83) merupakan
ebuah titik Sade titik kritis (
erupakan titik
Kemudian unt 0
de ll
ikan ikan masing
masing o
o
dari kedua nilai tersebut dapat dengan mudah disimpulkan bahwa titik k
dari kedua nilai tersebut dapat dengan mudah disimpulkan bahwa titik k
ss l, sedangkan 84) 84)
ter. l, sedangkan
ter. m
m Cen
uk kasus Cen
uk kasus β11< harga ei
merupakan
titi ter, sed kritis
merupakan titik
Dengan demi peroleh ba
gen yang terkait dengan masing-masing titik kritis diberikan oleh kedua nilai berikut:
Dari kedua nilai tersebut dapat dengan mudah disimpulkan bahwa titik kritis (83)
k Cen angkan titik (84)
Sadel.
hwa kian, dapat di
kedua persamaan (76) dan(77) memilki hubungan simultan yang sama artinya jika
1 0
β < maka β2<0begitu pula sebaliknya, sebab jika hubungannya kontradiktif maka hanya menimbulkan satu buah titik kritis saja. ilustrasi gambar trayektori terkait dengan menggunakan “Mathematica dan Mapple11
kan pada ar 24-27
diberi gamb
ambar 24 Plot kasus 1 0, 2 0
G β < β <
-4 -2 0 2 4
-4
-2
0 2 4
F1HtL
F2
H
t
L
Plot Bidang Fase
(
)
(
)
(
)
(
)
2
2 2 2 2 2
3
1 2
sn , 2 sn ,
0
sn , sn ,
x k k x k k
x k x k
ζ ζ ζ ζ ζ
β ζ β ζ
⎧ ⎡− + − ⎤⎫
⎪ ⎣ ⎦ =⎪
⎨ ⎬
⎪− + ⎪
⎩ ⎭
(89)
(
)
(
)
(
)
2
2 2 2
2 2 2
2 sn ,
sn , 0
sn ,
k x k
x k
k x k
ζ ζ ζ
ζ
ζ β β ζ
⎧ ⎡− + −⎤⎫
⎪ ⎢ ⎥⎪
1 2
=
⎨ ⎬
⎢ − + ⎥⎪
⎣ ⎦
⎪⎩ ⎭
(90)
(
)
22 2 2 2 2
2 1
2ζ k β sn ζx k, ζ ζ k β 0
⎡ + ⎤ − − − =
⎣ ⎦
(91)
2
2 2
k β
ζ
− = ±
2 1
2 4
2
β β
ζ = ± −
(92)
(93)
2
2
k β
2 1
β β
− =
− (94)
ambar 25 Trayektori Kasus
G β1<0,β2<0
dengan menggunakan Mapple
ambar 26 Plot untuk kasus
G β1>0,β2>0
Dengan menggunakan Mathematica
ambar 27 Trayektori Kasus
G β1>0,β2>0
dengan menggunakan Mapple
Unt jenis tipe
F
2.
te
nalisa Sistem Dinamik Fungsi Eliptik acobi Pada Soliton Optik Nonlinear
ada pembahasan sebelumnya fungsi F
rs sembarang.
A J P
ebut masih berupa fungsi uk soliton spasial punya dua
soliton yakni “Bright Soliton” dan “Dark Soliton”. Pada kasus “Bright Soliton” fungsi
merupakan fungsi sech
( )
ζx . Sedangkauntuk “Dark Soliton” fungsi Fmerupakan
fungsi
n
( )
tanh ζx . Namun untuk penelitian
kali ini akan digunakan fungsi Fyang
erupakan fungsi d
m ari Jacobian Eliptik
(
)
(
)
(
)
sn ζx k, , cn ζx k, ,dandn ζx k, . Dimana
parame nunjukan modulus yang
terkontr kan parameter zeta ( )
ter k me
ol, sedang ζ
dapat dipandang sebagai frekuensi sudut. Untuk mendapatkan nilai kedua parameter tersebut, Pertama-tama substitusikan fungsi
(
)
sn ζx k, k persamaan (74) maka diperoleh: e
den an mengatur kembali persamaan (89)
ma diperoleh:
aan (90), ternyata ersamaan tersebut bisa dikelompokan
enurut fungsi g
ka
erdasarkan persam b
p
(
)
2sn ,
m ζx k sehingga
ersamaan (90) menjadi:
erlihat, ba
(91) secara aljabar nilai dari koefisien eta
p
dari persamaan (91) t hwa dengan
meyelesaikan persamaan iasa maka akan diperoleh b
( )
z ζ dan koefisien k. Berikut hasilnya:
emudian substitusikan persamaan (93) ke ersamaan (92), dalam hal ini gunakan ertanda positif, sehingga diperoleh:
k
p nilai
(
)
2 2(
)
2 2(
)
1
, 2 sn , cn
0
x k k x k x
ζ ζ ζ ζ β ζ β ⎧ ⎡ − ⎤− ⎫ ⎣ ⎦ ⎪ ⎪
(
)
(
)
(
2)
cn ζx k, 1 sn ζx k,
2 cn ,k = ⎨ ⎬ ⎪ ⎩+ − ⎡⎣− + ⎤⎦ ⎪⎭ (95)
(
)
(
)
(
)
22 2 2
2
1 2 2
2 sn ,
cn , 0
sn ,
k x k
x k x k ζ ζ ζ ζ β β β ζ ⎧ ⎡ − ⎤⎫ ⎪ ⎢ ⎥ =⎪ ⎨ ⎬ ⎢− + − ⎥ ⎪ ⎣ ⎦⎪ ⎩ ⎭ (96)
(
)
22 2 2
2 1 2
2ζ k β sn ζx k, ζ β β 0
⎡ − ⎤ − − + = ⎣ ⎦ (97) 2 2 k 2 β ζ = ± 2 1 ζ = ± β −β (98) (99) 2 2 1 2 2 k β β −β = (100)
(
)
(
)
(
)
)
2 2dn , 2 sn ,
dn ,
1
x k k x k k
x k
k x k
ζ ζ ζ ζ ζ ⎫ − ⎣ ⎦ ⎛− ⎞ ⎜ ⎟⎪ − + ⎡ ⎤ ⎟ − +
⎪ 1dn
(
,)
2(
⎦ ⎠⎭⎪sn , x k β ζ β ζ ⎜ ⎣ ⎝ ⎩ 2
2 2 2 2
⎡ ⎤ 0 = ⎬ ⎧ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ (101
(
)
(
)
(
)
22 2 2 2
2 2
1 2 2
2 sn ,
dn , 0
sn ,
k x k k
x k
k x k
ζ ζ ζ ζ β β β ζ ⎧ ⎡ − ⎤⎫ ⎪ ⎢ ⎥⎪ ) = ⎨ ⎬ ⎢− + − ⎥ ⎪ ⎣ ⎦⎪ ⎩ ⎭ (102)
(
)
22 2 2 2 2
2 1
2ζ k β k sn ζx k, ζ k β β2 0
⎡ − ⎤ − − + =
⎣ ⎦
(103)
2 1
k β −β
ζ = ± 2 2 2 β ζ = ± (104) (105) 2 1 2 k 2 β −β = β (106)
2 1 2 2 4
2 1 1
1
4
2 2
H = F −β F +β F (107)
1 2 H F F ∂ = ∂ 2 1 H F F ∂ = − ∂ (108) Langkah berikutnya, substitusikan fungsi
(
)
cn ζx k, ke persamaan (74) maka akan
idapatkan hasil:
(109) d
den an mengatur kembali persamaan (95), maka akan diperoleh:
g
dari persamaan (96) dapat diperoleh, bahwa persamaan (96) ternyata bisa dikelompokan
erdasarkan fungsi
b sn
(
ζx k,)
2 sehinggaersamaanya menjadi:
ikan pers m ka akan diperoleh ni p
dengan demikian, dari persamaan (97) terlihat,
bahwa dengan meyelesa a aan (97)
secara aljabar biasa ma lai
dari koefisien zeta
( )
ζ dan koefisien erikut hasilnya:alam hal ini gunakan nilai ehingga diperoleh:
Setelah fu
k. B
kemudian substitusikan persamaan (99) ke persamaan (98), d
ertanda positif, s b
ngsi sn
(
ζx k,)
dan cn(
ζx k,)
, berikut akan disubstitusikan fungsi dn(
ζx k,)
ke persamaan (74), sehingga diperoleh:(101),
ma akan diperoleh:
sebelumnya, ternyata 02) bisa pula dikelompokan
n fungsi
(
dengan mengatur kembali persamaan ka
sama halnya dengan cara yang diterapkan pada kedua fungsi
persamaan (1
b
)
2sn ,
erdasarka ζx k sehingga
iperoleh hasil:
bar nilai dari koefisien zeta d
dengan demikian, dari persamaan (103) terlihat, bahwa dengan meyelesaikan
persamaan (103) secara alja biasa maka
akan diperoleh
( )
ζan koefisien k. Berikut hasilnya:
ke kan nilai ertanda positif, sehingga diperoleh:
engan didapatkannya keseluruhan nila d
kemudian substitusikan persamaan (105) persamaan (104), dalam hal ini guna b
d i dari
parameter k dan zeta ( )ζ untuk keseluruhan fungsi sn
(
ζx k,) (
, cnζx k,)
,dandn(
ζx k,)
, makakan bisa dianalisa secara satu per satu nil
a ai
edua parameter tersebut yang cocok ngsinya masing-masing.
k pada
fu
Untuk fungsi sn
(
ζx k,)
nilai parameter keduanya arus memeh nuhi syarat β β1, 2<0 agar nilai dari parameter k dan zeta ( )ζ bernilai real, kemudian untuk fungsi cn(
ζx k,)
nilai dari parameter k dan zeta ( )ζ harus memenuhi syarat β β1, 2>0→β1<β2 atau1 0, 2 0
β < β > . Sedangkan untuk fungsi dn
(
ζx k,)
0 syarat yang harus dipenuhi yaitu β1<0,β2atau 1, 2 0
>
β β > . Dengan memasukan
tersebut ke parameter untuk fung asing
masing, maka bisa ditinjau bentuk yektori
solusi dari masing-masing fungsi.
ini tinjau kembali persama )
dan (77), Hamiltonian yang co persamaan tersebut yaitu:
dimana persamaan (75) dan (76) memenuhi per
syarat si m tra
Berikut an (76
cok dengan
mengingat pada titik (0,0) merupakan titik Sadel untuk syarat β β1, 2>0, maka nilai Hamiltonian untuk trayektori yang terkait
gan titik kritis tersebut
den adalah H=0.
Dengan demikian, sambil memperhatikan enyataan terdapat dua buah titik Center dan
d ksud d
Gambar 28 Trayektori untuk k
sebuah titik Sadel di titik asal, maka bentuk
trayektori yang ima iberikan pada
gambar 28.
0 H=
Sedangkan untuk titik kritis (0,0) yang erupakan titik Center untuk syarat m
1, 2 0 β β <
engan titi
, maka nilai hamiltonian yang terkait k kritis tersebut yaitu
d 2
/ 4 H= −β1 β2.
De empe atikan
kenyataan terdapat dua titik Sadel dan sebuah titi
gambar 2
ambar 29 Trayektori untuk
ngan demikian, sambil m rh
k Center di titik asal, maka bentuk trayektori yang dimaksud diberikan pada
9.
G 2
1 / 4 2
H= −β β
Berikut ini tinjau kembali persamaan (107), dengan mensubstitusikan fungsi eliptik Jacobi sn
(
ζx k,) (
, cn ζx k,)
,dandn(
ζx k,)
secara bergantian ke parameter F1, kemudian turunanpertam ngsi Jacobian
elip eter F, lal
a dari masing-masing fu
tik secara bergantian ke param u
2
pilih nilai x=0. Maka akan didapatkan betuk trayektori solusi yang terkait ketiga fungsi eliptik t
Untuk fungsi eliptikal Jacobi
(
ersebut.
)
sn ζx k, syarat parameter yang harus dipenuhi yaitu1, 2 0
β β < . Sehingga bentuk trayektor yang
dapat diper diberikan pada gambar 30.
i oleh
ambar 30 Trayektori fungsi
(
)
G sn ζx k,
engan kondisi k 1 dan h 0
d < >
dari gambar 30, dapat diketahui ternyata fungsi sn
(
ζx k,)
berada di dalam trayektoriyang terkait untuk Hamiltonian 2
1 / 4 2
H= −β β
yan 9. Pada
gam ketahui pula ondisi yang
ip ar ketika nilai h>0, nilai h
1dan 2
F