PERANCANGAN PENGENDALI DEBIT AIR DARI
KETINGGIAN YANG BERBEDA MENGGUNAKAN
MIKROKONTROLER BASIC STAMP
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada
Program Studi Teknik Komputer Diploma Tiga di Jurusan Teknik Komputer
oleh :
Yophi Ade Chandra
10808021
Pembimbing :
S. Indriani L, MT
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
iii
ABSTRAK
Bejana utama yang memiliki 2 lubang dengan posisi ketinggian yang berbeda, dimana pada kedua lubang tersebut memiliki diameter yang sama besarnya. bejana diisi dengan air lalu buka kedua katup lubang tersebut biarkan air mengalir pada tiap lubang dalam waktu yang sama. Secara pengamatan didapatkan lubang yang letaknya lebih dekat dari dasar bejana memiliki debit air yang lebih besar dibandingkan dengan lubang yang jauh dengan dasar bejana. Dari permasalahan diatas maka untuk didapatkan debit air yang sama menggunakan mikrokontroler Basic Stamp BS2p40. Pada perancangan alat ini pelampung yang ada di bejana 1 dan bejana 2 akan mendektesi keluaran air pada tiap bejana 1 dan bejana 2, lalu potensiometer bergeser dan berubah nilai tegangannya sesuai dengan jarak pelampung, data potensiometer lalu dikirimkan ke mikrokontroler Basic Stamp BS2P40, Mikrokontroler Basic Stamp BS2P40 akan mengolah data tersebut agar dapat dikirim ke Motor Servo kedalam sebuah pulsa. Agar dapat menggerakan arah/posisi servo yang diinginkan. Dari hasil pengujian didapatkan debit air tiap bejana mendapatkan kondisi debit air sama.
iv
KATA PENGANTAR
Bismillahirrohmaanirrohim
Assalamu’alaikum Wr.Wb.
Segalah puji bagi allah SWT. Pencipta dan Pemelihara alam semesta,
shalawat serta salam semoga terlimpah bagi Muhammad SAW, keluarga dan para
pengikutnya yang setia hingga akhir masa.
Atas rahmat Allah SWT, akhirnya Penulis dapat menyelesaikan Tugas
Akhir ini dengan judul “ Perancangan Pengendali Debit Air dari Ketinggian Yang Berbeda Menggunakan Mikrokontroler Mini Basic Stamp”, meskipun proses
belajar sesungguhnya tak akan pernah berhenti. Tugas akhir ini sesungguhnya
bukanlah sebuah kerja individual dan akan sulit terlaksanakan tanpa bantuan
banyak pihak yang tak mungkin penulis sebutkan satu persatu, namun dengan
segalah kerendahan hati,
Penulis mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Ibu Sri Nurhayati, M.T. Selaku Ketua Jurusan Teknik Komputer.
2. Ibu S. Indriani L, M.T. Selaku dosen pembimbing.
3. Bapak Agus Mulyana, M.T. Selaku dosen wali atas segala dukungan baik
akademik maupun non akademik.
4. Kedua orang tua tercinta dan saudaraku mba ika, kakak dedef, adi, yang
selalu mendoakan serta memberi motivasi moril maupun materil sehingga
dapat menyelesaikan tugas akhir ini.
5. Seluruh dosen beserta staf Jurusan Teknik Komputer.
6. Teman-teman mahasiswa D3 khususnya 08 TK 04 yang telah memberikan
motivasi dan doa sehingga penulis dapat menyelesaikan Tugas Akhir ini.
7. Rekan-rekan asisten lab. Elektronika.
iv
9. Rekan-rekan penulis yang telah banyak memberikan bantuan terbesar dalam
doa, perhatian dan dorongan semangat sehingga penulis dapat
menyelesaikan studi dan penulisan Tugas Akhir ini.
Dengan sebesar-besarnya, penulis ucapkan banyak terima kasih kepada
semua pihak yang secara langsung maupun tidak langsung telah mendukung dan
membantu penulis. Semoga Allah SWT membalas amal budi dan kebaikan semua
pihak lebih dari apa yang telah diberikan kepada penulis. Amin
Bandung, Agustus 2012
vi
1.4 Metodologi Penelitian ... 2
1.5 Sistem Penulisan ... 3
BAB II DASAR TEORI...4
2.1 Debit Air...4
2.2 Bejana Silinder... 4
2.3 Mikrokontroler Basic Stamp BSP40 ... 5
2.4 Motor Servo ... 8
2.5 Potensiometer ... 10
2.6 Catu Daya ... 11
2.7 ADC (Analog To Digital Converter ... 12
2.8 Basic Stamp Editor V2.4 ... 13
BAB III PERANCANGAN SISTEM...15
3.1 Perancangan Sistem...15
3.2 Blok Diagram Kerja Sistem………...16
3.3 Flowchart Program Sitem Keseluruhan...18
vii
4.1 Pengujian Perangkat Keras...20
4.2 Pengujian Basic Stamp BSP40...20
4.3 Pengujian Motor Servo...21
4.4 Pengujian Catu Daya...21
4.5 Pengujian Pada Bejana Menggunakan Potensiometer...22
BAB V KESIMPULAN DAN SARAN...24
5.1 Kesimpulan...24
5.2 Saran...24
1
tersebut berada pada ketinggian yang berbeda. Seterusnya pada bejana diisi dengan
air lalu buka kedua katup lubang tersebut biarkan air mengalir pada tiap lubang dalam
waktu yang sama. Pengujian bisa dilakukan dengan cara ambil dua buah gelas dengan
posisi dibawah kedua lubang tersebut, lalu buka katup kedua lubang tersebut
bersamaan, secara pengamatan lubang yang letaknya lebih dekat dari dasar bejana
lebih deras keluar air dari lubang yang jauh dari dasar bejana. Dari permasalahan
diatas maka untuk dapat menghasilkan debit air yang sama pada ketinggian yang
berbeda berbeda. Dilakukan pengendali debit air dari ketinggian yang berbeda agar
didapatkan debit air yang sama dari tempat lubang yang tidak sama. Pengendali
tersebut menggunakan Mikrokontroler Basic Stamp BSP40 dan Motor Servo.
Mikrokontroler Basic Stamp BSP40 adalah Mikrokontroler yang dikembangkan
oleh Parallax Inc. Mikrokontroler Basic Stamp BSP40 yang diprogram menggunakan
format bahasa Basic. Adapun jenis mikrokontroler selain Mikrokontroler Basic
Stamp BSP40 adalah mikrokontroler dengan bahasa pemrograman JAVA bisa
menggunakan Jstamp, dan mikrokontroler Atmega yang menggunakan bahasa
pemrograman assembler. Assembler adalah sebuah program komputer untuk
menerjemahkan bahasa Assembly. Bahasa pemrograman yang mengunakan bahasa
assembly sangat susah di pelajari, oleh karena menggunakan Mikrokontroler Basic
Stamp BSP40 yang diprogram menggunakan bahasa Basic lebih mudah di pelajari
2
Dengan membuat pengendali air diharapkan mampu memberikan solusi
terhadap bejana dengan sisi ketinggian lubang yang berbeda agar keluaran air pada
tiap lubang didapatkan debit air yang sama.
1.2 Maksud dan Tujuan
Adapun maksud dan tujuan dari pembuatan perancangan pengendali debit air
dari ketinggian yang berbeda menggunakan Mikrokontroler Basic Stamp BSP40
adalah untuk mengendali keluaran air pada lubang bejana dari sisi ketinggian yang
berbeda agar keluaran air dari tiap lubang bejana didapatkan debit air yang sama.
1.3 Batasan Masalah
Pada perancangan pengendali debit air dari ketinggian yang berbeda
menggunakan Mikrokontroler Basic Stamp BSP40 yang akan dibuat ini terdapat
beberapa batasan masalah karena keterbatasan pengetahuan dan kemampuan penulis,
yaitu :
1. Bejana berbentuk silinder berdiameter 24 cm dan tinggi 32 cm dapat menampung
air 20 liter.
2. Lubang bejana hanya memiliki dua posisi lubang dengan ketinggian yang
berbeda.
3. Diameter awal pada kedua lubang 2 cm.
4. Menggunakan Mikrokontroler Basic Stamp BSP40.
1.4 Metodologi Penelitian
1. Studi literatur
Yaitu suatu metode pengumpulan data dengan cara membaca atau mempelajari
buku-buku yang sesuai dengan topik tugas akhir.
2. Metode Perancangan
Yaitu metode yang dilakukan dengan cara menerapkan teori untuk merancang
3 3. Metode Implementasi
Yaitu melakukan melakukan pelaksanaan perancangan perangkat keras dan
perangkat lunak yang berhubungan dengan tugas akhir ini.
4. Metode pengujian
Yaitu melakukan pengujian kerja perangkat keras dan perangkat lunak yang
berhubungan dengan tugas akhir ini.
1.5 Sistem Penulisan
Sistematika penulisan tugas akhir ini meliputi:
BAB I PENDAHULUAN
Bab ini membahas latar belakang tugas akhir yang dilakukan, maksud dan tujuan,
batasan masalah, metodologi penelitian dan sistematika penulisan.
BAB IILANDASAN TEORI
Bab ini berisi tentang teori-teori yang berhubungan dengan tugas akhir yang terdiri
dari teori perangkat keras dan perangkat lunak.
BAB IIIPERANCANGAN SISTEM
Bab ini menjelaskan tentang perancangan perangkat keras dan perangkat lunak.
BAB IV PENGUJIAN
Bab ini berisi tentang pengujian kerja perangkat keras dan perangkat lunak.
BAB VKESIMPULAN DAN SARAN
Bab ini berisi kesimpulan dari pembahasan tugas akhir ini dan saran-saran yang
4
BAB II
LANDASAN TEORI
Landasan teori sangat membantu untuk dapat memahami suatu sistem selain
itu dapat juga dijadikan sebagai bahan acuan dalam merencanakan suatu sistem yang
akan dibuat. Dengan pertimbangan hal-hal tersebut, maka landasan teori merupakan
bagian yang harus dipahami untuk pembahasan selanjutnya.
2.1 Debit Air
Debit merupakan ukuran banyaknya volume air yang dapat lewat dalam suatu
tempat atau yang dapat ditampung dalam suatu tempat tiap satu satuan waktu tertentu.
Satuan debit pada umumnya mengacu pada satuan volume per detik cm/detik dan
satuan waktu. Apabila Q menyatakan debit air dan V menyatakan volume air,
sedangkan ∆t adalah selang waktu tertentu mengalirnya air tersebut, maka hubungan
antara ketiganya dapat dinyatakan sebagai berikut.[7]
Q =V.∆t (2.1)
Keterangan:
Q = Debit air (cm/detik)
V = Volume (cm)
5
2.2 Bejana Silinder
Bejana silinder adalah bejana dengan bentuk bangun ruang tiga dimensi yang
dibentuk oleh dua buah lingkaran yang sejajar dan sebuah persegi panjang yang
mengelilingi kedua lingkaran tersebut. Tabung memiliki 3sisi dan 2rusuk.
Kedua lingkaran disebut sebagai alas dan tutup tabung serta persegi panjang
yang menyelimutinya disebut sebagai selimut tabung. Bentuk bejana dapat berbagai
macam bentuk, tetapi yang biasa digunakan terdiri-dari bentuk bola, silinder, dan
kerucut. Dibawah ini gambar bejana silinder. [8]
Gambar 2.1 Bejana Silinder
Rumus volume bejana silinder
V= (2.2)
Keterangan:
V = Volume (cm)
t = Tinggi (cm)
= Jari jari
6
2.3 Mikrokontroler Basic Stamp BSP40
Mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan
dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara
khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data. Secara
teknis hanya ada dua macam-macam mikrokontroler yaitu RISC dan CISC dan
masing-masing mempunyai keturunan/keluargasendiri-sendiri.RISC singkatan dari
Reduced Instruction Set Computer adalah intruksi terbatas tapi memiliki fasilitas
yang lebih banyak.
CISC singkatan dari Complex Instruction set computeradalah instruksi bisa
dikatakan lebih lengkap tapi dengan fasilitas secukupnya. Jenis-jenis mikrokontroler
dari keluarga motorola dengan seri 68xx, dan mikrokontroler dari keluarga MCS51
yang diproduksi Atmel, Philip, Dallas, serta mikrokontroler dari keluarga PIC dari
Microchip, Renesas, Zilog. MCS51 termasuk keluarga dari mikrokontroler Basic
Stamp BS2P40, bahasa pemograman menggunakan bahasa Basic. Basic Stamp
adalah mikrokontroler yang dikembangkan oleh Parallax Inc yang diprogram
menggunakan format bahasa pemrograman Basic. [8]
Mikrokontroler Basic Stamp BSP40 membutuhkan power supply saat
mendownload pemrograman dan tidak kehilangan program yang sudah di download
saat baterai atau power supply dicabut. Kode Pbasic disimpan di dalam EEPROM
(Electrical Erasable Programmable Read Only Memory) serial pada board Basic
Stamp BS2P40.
EEPROM (Electrical Erasable Programmable Read Only Memory)
menyediakan penyimpanan yang sulit diubah, yaitu menjaga memory saat kehilangan
power. EEPROM (Electrical Erasable Programmable Read Only Memory)
digunakan dalam Basic Stamp 1 dan 2 dijamin menyimpan selama 40 tahun ke depan
7
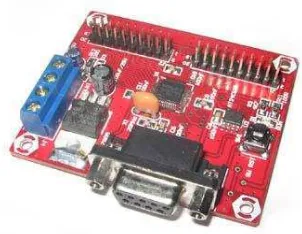
Gambar 2.2 Mikrokontroler Basic Stamp BS2P40
Mikrokontroler Basic Stamp BSP40 ini mempunyai spesifikasi sebagai brikut:
a. Mikrokontroler Basic Stamp BS2P40 Interpreter Chip (PBASIC48W/P40).
b. 8 x 2Kbyte EEPROM (Electrical Erasable Programmable Read Only
Memory) yang mampu menampung hingga 4000 instruksi.
c. Kecepatan prosesor 20MHz turbo dengan kecepatan eksekusi program hingga
12000 instruksi per detik.
d. RAM (Random Access memory) sebesar 38byte (12 I/O, 26 variabel) dengan
Scratch Pad sebesar 128 byte.
e. Jalur input/ output sebanyak 32 pin.
f. Tersedia jalur komunikasi serial UART RS-232 dengan konektor DB9.
g. Tegangan input 9-12 Vdc dengan tegangan output 5 Vdc.
Untuk mengolah data yang dikirim dari komputer digunakan Mikrokontroler
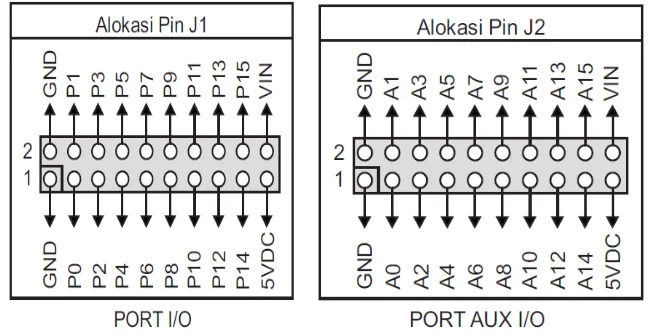
Basic Stamp BS2P40. Di bawah ini adalah konfigurasi pin-pin Basic Stamp BS2P40
yang dipakai dalam perancangan.
Berikut ini adalah alokasi pin yang terdapat pada Mikrokontroler Basic Stamp
8
Gambar 2.3 Alokasi Pin Mikrokontroler Basic Stamp BS2P40
2.4 Motor Servo
Motor Servo adalah sebuah motor dengan sistem umpan balik tertutup di mana
posisi dari Motor akan diinformasikan kembali ke rangkaian kontrol yang ada di
dalam Motor Servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear,
potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan
batas sudut dari putaran Servo. Sedangkan sudut dari sumbu motor Servo diatur
berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Servo
biasa digunakan untuk steering/kemudi pada pesawat atau mobil RC, untuk lengan
robot, untuk pengarah sensor dan untuk keperluan lain yang membutuhkan gerakan.
Servo dapat digerakkan dengan mengirimkan pulsa tegangan 5V DC yang diulang
setiap 20 milidetik. Panjang pulsa menentukan posisi putaran. Servo dirancang untuk
menerima pulsa tegangan dengan variasi 0.75 milidetik sampai dengan 2.25
9
Pada umumnya Servo yang ada di pasaran sekarang ini mempunyai jangkauan
gerakan 0 sampai dengan 180 derajat. Ini berarti pulsa 0.75 milidetik untuk 0 derajat.
Pulsa 2.25 milidetik untuk 180 derajat dan pulsa 1.5 milidetik untuk 90 derajat.Hal
yang menarik dan unik dari Motor Servo adalah bahwa Motor Servo ini di kontrol
dengan manggunakan pulsa. Dengan komputer atau pun dengan menggunakan
rangkaian mikrokontroler, dapat dengan mudah mengontrol Motor Servo. Rangkaian
paling sederhana untuk mengontrol Servo adalah dengan menggunakan IC555.
Tegangan yang diperlukan Motor Servo adalah 5 Volt.Motor servo terbagi dalam dua
jenis Motor Servo yaitu Servo standar dan continous servo. Servo standard adalah
Motor Servo yang putarannya mermiliki batas maksimal dan minimum. Sedangkan
continous servo putarannya tidak memiliki batas maksimal dan minimum.
Standard servo memiliki 3 posisi utama yaitu posisi 0 derajat, posisi 90
derajat dan posisi 180 derajat. Sedangkan untuk Continuos servo dapat berputar
secara penuh 360 derajat baik berputar searah putaran jarum jam ataupun juga yang
berlawanan dengan arah putaran jarum jam, ditambah dengan posisi untuk berhenti.
Karena ada tiga buah posisi utama seperti yang dijelaskan diatas, maka di buatlah
sebuah cara khusus untuk mengatur Motor Servo tersebut. Cara yang digunakan
adalah dengan memberikan pulsa digital dengan lebar yang berbeda-beda. Jika
diberikan pulsa dengan lebar 1.5 milidetik maka Motor Servo akan berputar keposisi
tengah 90 derajat. Pulsa dengan lebar 2.0 milidetik akan membuat poros Motor Servo
menuju 180 derajat (posisi kanan).
Sedangkan pulsa 1.0 ms akan membuat Motor Servo akan berputarmenuju 0
derajat (posisi kiri) dan pulsa tersebut dikirim kan sebanyak 50 kali perdetik. Berikut
10
Gambar 2.4 Motor Servo
Berikut bagian-bagian dari Motor Servo:
a. Konektor yang digunakan untuk menghubungkan Motor Servo dengan Vcc,
Ground dan signal input yang dihubungkan ke Basic Stamp BS2P40.
b. Kabel menghubungkan Vcc, Ground dan signal input dari konektor ke Motor
Servo.
c. Tuas menjadi bagian dari motor servo yang keliatan seperti suatu bintang
four-pointed. Ketika motor servo berputar, tuas motor akan bergerak ke bagian yang
dikendalikan sesuai dengan program.
d. Cassing berisi bagian untuk mengendalikan kerja motor servo yang pada
dasarnya berupa motor DC. Bagian ini berkerja untuk menerima instruksi dari
basic stamp dan mengkonversi ke dalam sebuah pulsa untuk menentukan arah /
posisi servo.
2.5 Potensiometer
Potensiometer adalah resistor tiga terminal dengan sambungan geser yang
membentuk pembagi tegangan dapat disetel. Jika hanya dua terminal yang digunakan
(salah satu terminal tetap dan terminal geser), potensiometer berperan Sebagai
resistor variabel atau Rheostat. Potensiometer biasanya digunakan untuk
mengendalikan peranti elektronik seperti pengendali suara pada penguat.
11
transduser, misalnya sebagai sensor joystick. Adapun jenis-jenis dari Potensiometer
sebagai berikut:[1]
1. Potensiometer putar yang sering disebut Potensiometer String. Potensiometer
Ini adalah multi-turn Potensiometer dioperasikan oleh reel yang terpasang
kawat berbalik melawan pegas. Hal ini digunakan sebagai transduser posisi.
2. Potensiometer tiga terminal alat ini dapat digunakan sebagai variabel resistor
dua terminal dengan tidak menghubungkan ke terminal ketiga. Praktek ini
umum untuk menghubungkan terminal wiper ke ujung yang tidak terpakai dari
trek perlawanan untuk mengurangi jumlah variasi resistensi yang disebabkan
oleh kotoran di trek.
3. Potensiometer digital pada komponen elektronik ini merupakan alat yang
meniru fungsi Potensiometer analog. Melalui sinyal input digital, perlawanan
antara dua terminal dapat disesuaikan, seperti dalam sebuah Potensiometer
analog.
4. Potensiometer membran, dalam Potensiometer membran ini menggunakan
membran konduktif elemen geser ke kontak resistor pembagi tegangan.
Linearitas dapat berkisar dari 0,5% sampai 5% tergantung pada desain, material
dan proses manufaktur. Keakuratannya biasanya antara 0.1mm dan 1.0mm
dengan resolusi secara teoritis tak terbatas.
12
Gambar 2.6 Potensiometer 10 KΩ
2.6 Catu Daya
Perangkat elektronika mestinya dicatu oleh suplai arus searah DC (direct
current)yang stabil agar dapat bekerja dengan baik. Baterai atau aki adalah sumber
catu daya DC yang paling baik.Namun untuk aplikasi yang membutuhkan catu daya
lebih besar, sumber dari baterai tidak cukup.Sumber catu daya yang besar adalah
sumber bolak-balik AC (Alternating Current) dari pembangkit tenaga listrik. Untuk
itu diperlukan sautu perangkat catu daya yang dapat mengubah arus AC menjadi DC.
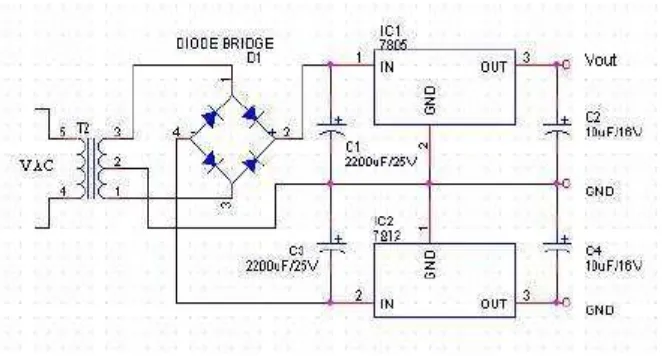
Tegangan keluaran dari transformator masih dalam bentuk tegangan bolak-balik
(AC), sehingga harus disearahkan oleh penyearah gelombang penuh menggunakan
dioda bridge (dioda yang disusun jembatan). Sebelum tegangan diregulasi,
dilewatkan dulu pada tapis atu filter untuk memperkecil ripple. Komponen filter yang
digunakan yaitu kapasitor polar. Untuk meregulasi tegangan digunakan regulasi
tegangan positif yaitu tegangan 12V (7812) dan 5V (7805). Konfigurasi kaki IC
regulator tegangan positif adalah kaki 1 berfungsi sebagai input, kaki 2 terhubung ke
13
Gambar 2.7 Penyearah Menggunakan Sistem Jembatan
2.7 ADC ( Analog To Digital Converter)
ADC (Analog To Digital Converter) digunakan untuk mengubah keluaran
sensor yang masih berubah analog menjadi besaran digital. Resolusi pada ADC
merupakan ketelitian nilai hasil konversi. ADC 8 bit akan memiliki keluaran 8 bit
data digital. Ini berarti sinyal input dapat dinyatakan dalam 225 ( -1) nilai diskrit.
Karena prinsip kerja ADC adalah mengkonversi sinyal analog ke dalam bentuk
besaran yang merupakan rasio perbandingan sinyal input dengan tegangan referensi.
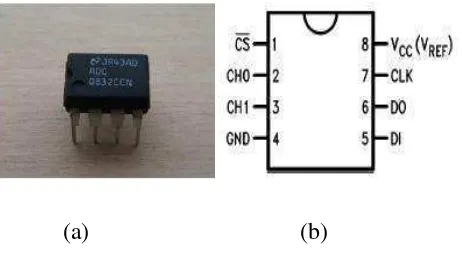
ADC yang digunakan adalah ADC0832, ADC ini merupakan sebuah ADC serial
yang datanya langsung dapat diterima Mikrokontroler pada satu pin saja. ADC ini
memiliki resolusi 8 bit dengan 2 channel analog multiplaxer. Dapat berkerja dengan
14
(a) (b)
Gambar 2.8 (a) Bentuk Fisik IC ADC0832, (b) Konfigurasi Pin IC ADC0832
Spesifikasi yang dimiliki IC ADC0832 sebagai berikut:
1. Jangkauan input berkisar 0-5 Volt dengan satu buah Catu Daya 5 Volt.
2. Mempunyai 2 channel multiplaxer dengan 2 buah alamat logika.
3. Mudah Interface ke semua mikrokontroler.
4. Beroperasi dengan link data serial.
5. Mudah untuk digunakan bersama rangkaian mikrokontroler.
2.8 Basic Stamp Editor V2.4
Program dapat bermacam-macam bentuk versi dan bahasa pemrogramannya,
sesuai dengan spesifikasi dari mikrokontroler yang digunakan. Mikrokontroler Basic
Stamp (BS2P40) menggunakan bahasa pemrograman basic. Software yang digunakan
adalah Basic Stamp Editor. Basic Stamp Editor adalah sebuah editor yang dibuat oleh
Paralax Inc untuk menulis program, mengcompile dan unduh ke mikrokontroler
keluarga Basic Stamp. Program ini memungkinkan penggunanya memprogram Basic
Stamp dengan bahasa basic yang relatif ringan dibandingkan bahasa pemrograman
lainnya. Berikut ini beberapa instruksi-instruksi dasar yang dapat digunakan pada
15
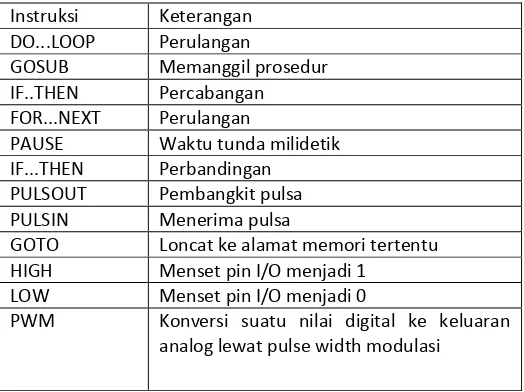
Tabel 2.1 Beberapa Instruksi Dasar Basic Stamp
Instruksi Keterangan DO...LOOP Perulangan
GOSUB Memanggil prosedur IF..THEN Percabangan FOR...NEXT Perulangan
PAUSE Waktu tunda milidetik IF...THEN Perbandingan
PULSOUT Pembangkit pulsa PULSIN Menerima pulsa
GOTO Loncat ke alamat memori tertentu HIGH Menset pin I/O menjadi 1
LOW Menset pin I/O menjadi 0
15
BAB III
PERANCANGAN SISTEM
3.1 Perancangan Sistem
Pada pembahasan perancangan sistem ini meliputi perancangan perangkat
keras. Cara kerja dari keseluruhan perancangan pengendali debit air dari ketinggian
yang berbeda mengunakan Mikrokontroler Basic Stamp BS2P40. Berikut ini prinsip
cara kerja sistem. Sesuai pembacaan pelampung pada keluaran air di bejana, data
pelampung di kirim ke potensiometer dalam bentuk tegangan lalu dikirim ke
Mikrokontroler Basic Stamp BS2P40 yang telah dikonversi ke bentuk digital oleh
ADC0832. Mikrokontroler Basic Stamp BS2P40 ini akan menentukan besarnya
pulsa untuk menentukan arah/posisi motor servo pada kran air untuk mengendali
keluaran pada posisi lubang ketinggian yang berbeda berlangsung sama yang
mengacu pada nilai masing-masing pelampung.
Pelampung 1
16
Pada diagram blok perancangan sistem diatas dapat dijelaskan yaitu nilai dari
potensiometer 1 dan potensiometer 2 dipengaruhi oleh pelampung yang akan
mengapung ketika bejana terisi air, setalah itu nilai potensiometer diolah terlebih
dahulu kedalam desimal dengan ADC (Analog To Digital Converter). Data ADC
(Analog To Digital Converter) dikirim ke Mikrokontroler Basic Stamp BS2P40.
Setelah data dari ADC diterima Mikrokontroler Basic Stamp BSP40. Mikrokontroler
Basic Stamp BS2P40 akan mengolah data tersebut agar dapat menentukan besarnya
pulsa ke motor servo atas atau motor servo bawah sesuai dengan data yang diterima
Mikrokontroler Basic Stamp BS2P40. Personal Computer (PC) hanya menampilkan
terminal data dari mikrokontroler saja..
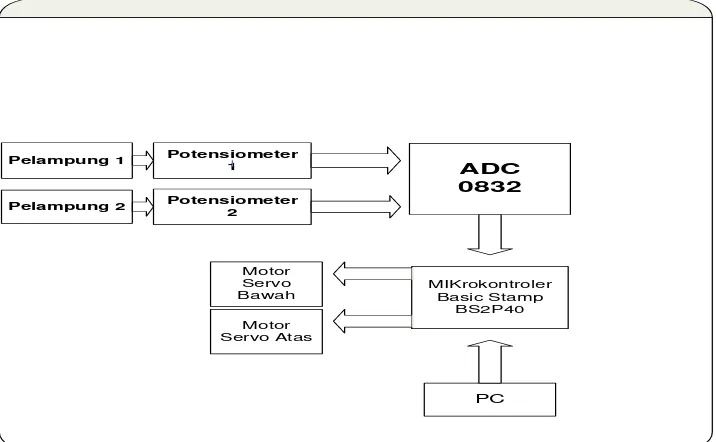
3.2 Blok Diagram Kerja Sistem
Pada blok diagram kerja sistem adalah menjelaskan cara kerja sistem yang ada
di bejana 1 dan bejana 2 yang meliputi pelampung, potensiometer, ADC (Analog To
Digital Converter), Mikrokontroler Basic Stamp BS2P40, Personal Computer (PC).
Pelampung 1
17
Pada gambar 3.2 menjelaskan cara kerja mulai dari pelampung 1 dan
pelampung 2 berfungsi sebagai mendektesi jarak ketinggian air yang ada di bejana 1
dan bejana 2. Nilai tersebut akan masuk ke potensiometer 1 dan potensiometer 2.
Potensiometer lalu bergeser dan berubah nilai tegangannya sesuai dengan jarak pada
pelampung 1 dan pelampung 2. Setelah itu nilai potensiometer masuk ke ADC
(Analog To Digital Converter).
Lalu ADC (Analog To Digital Converter) mengonversi keluaran analog berupa
tegangan dari potensiometer menjadi data digital kemudian dikirim ke
mikrokontroler. Mikrokontroler mengolah data digital dari ADC (Analog To Digital
Converter). Personal Computer (PC) hanya menampilkan terminal data dari
mikrokontroler saja.
Data nilai ADC (Analog To Digital Converter) dari potensiometer masuk ke
mikrokontroler. Mikrokontroler mengolah data digital dari ADC (Analog To Digital
Converter). Lalu data Mikrokontroler dikirimkan ke motor servo untuk menggerakan
katup kran sesuai dengan data potensiometer dari pelampung. Personal Computer
18
3.3 Diagram Alir Program Sistem
Pada pada diagram alir program sistem adalah menjelaskan cara kerja program
secara keseluruhan.
19
Pada gambar 3.3 diagram alir program sistem, program pertama akan
membaca nilai ADC, yang kemudian apakah nilai adc0 dan adc1 lebih dari 50. Hal
ini menunjukan bahwa bejana masih kosong jika kondisi adc0 dan adc1 kurang dari
50, sehingga kedua motor servo dalam kondisi nyala (kran membuka penuh).Hal ini
untuk memenuhi kondisi diatas, ketika kondisi di atas terpenuhi maka program akan
masuk ke prosedur A. Disini debit air akan diatur berdasarkan kondisi air di
masing-masing bejana yang nilainya ditentukan oleh nilai adc0 untuk bejana1 dengan motor
servo bawah pengatur kran dan nilai adc1 untuk bejana2 dengan motor servo atas
pengatur kran. Pada saat nilai adc0 lebih besar dibanding nilai adc1, maka motor
servo bawah mati dan motor servo atas nyala. Pada saat nilai adc0 dan adc1 sama,
motor servo berputar 45 derajat atau kran membuka setengah. Jika nilai adc0 dan
adc1 tidak sama maka motor servo bawah mati dan motor servo atas nyala. Hal diatas
terjadi ketika nilai adc0 dan adc1 kurang dari 100, ketika 100 maka kedua motor
20
BAB IV PENGUJIAN
4.1 Pengujian Perangkat Keras
Pengujian perangkat keras dilakukan untuk mengetahui apakah perangkat keras
yang telah dirancang dapat bekerja atau berfungsi dengan baik sebagaimana yang
diinginkan. Pengujian yang dilakukan terhadap perangkat keras meliputi beberapa
blok rangkaian perangkat keras yang telah dirancang dan juga pengujian terhadap
gabungan dari beberapa blok rangkaian.
Komponen yang digunakan pada rangkaian dalam perancangan ini
terdiri-dari:
1. Basic Stamp( BS2P40).
2. Motor Servo.
3. CatuDaya.
4.2 Pengujian Basic Stamp BS2P40
Pengujian Mikrokontroler Basic Stamp BS2p40 menggunakan Basic Stamp
Editor. Proses pengujiannya dengan mendownload script program yang merupakan
implementasi agar mikrokontroler berfungsi sesuai dengan yang diharapkan. Ketika
proses download berhasil maka akan muncul jendela sukses, serta berfungsinya
Mikrokontroler tersebut sesuai dengan script program yang didownload. Adapun
gambar proses tersebut sebagai berikut.
21
4.3 Pengujian Motor Servo
Pengujian Motor Servo dilakukan dengan cara memberikan pulsa random
sehingga didapat sudut putaran dari motor servo tersebut. Berikut tabel pengujian:
Tabel 4.1 Hasil Pengujian Motor Servo Dan BSP40
Pulsa
Motor Bawah
(derajat) Motor Atas (derajat)
1100 0 0
2000 45 45
2800 180 180
Berdasarkan hasil pengujian motor servo saat motor servo diberikan pulsa
sesusai dengan nilai diatas didapat sudut perputaran yang cukup untuk mengerakan
kran. Ketika motor servo diberikan pulsa dibawah dan diatas nilai 1100 dan 2800
tidak ada perubahan putaran, sehingga bisa ditarik kesimpulan bahwa nilai 1100 dan
2800 adalah pulsa minimum dan maksimum untuk kedua motor servo tersebut.
4.4 Pengujian Catu Daya
Pengukuran Catu Daya dilakukan dengan menggunakan multimeter digital
yang dihubungkan dengan kaki input untuk mengukur input tegangan dan kaki output
untuk mengukur tegangan output dari IC LM 7805 dan LM 7812. Berikut data hasil
22
Tabel4.2 Hasil Pengukuran Catu Daya
IC Regulator Input Tegangan
(Volt)
Hasil Pengukuran
(Volt)
7805 5 4,89
7812 12 11,91
Berdasarkan hasil pengukuran catu daya pada IC LM 7805 diberi nilai input 5
volt menghasilkan output 4,89 volt, Sedangkan pada IC LM 7812 diberi nilai input 12
volt menghasilkan output 11,91 volt.
4.5 Pengujian Pada Bejana Menggunakan Potensiometer
Dalam pengujian ini maka dapat diketahui apakah keluaran air dari jarak
ketinggian yg berbeda didapatkan hasil keluaran air sama, dari Bejana 1 dan Bejana
2. Maka dapat dilakukan pengujian dengan cara pengukuran keluaran air dari tiap
lubang dari ketinggian yang berbeda. Dapat dilihat dari tabel pengujian berikut.
23
Berdasarkan tabel 4.3 diatas menujukan pada no 1 terlihat posisi awal bejana
1 dan 2 dalam keadaan kosong sehingga kedua motor servo terbuka 90 derajat. Pada
no 2 terlihat kondisi bejana 1 lebih besar dibanding bejana 2 sehingga motor servo
atas tertutup dan motor bawah terbuka. Pada no 3 kondisi bejana 1 lebih kecil
dibanding bejana 2 sehingga motor atas terbuka dan motor servo bawah tertutup.
Pada no 4 bejana 1 dan bejana 2 motor servo atas dan motor servo bawah tertutup
dengan sudut putaran 45 derajat. Pada no 5 apabila kondisi isi di bejana 1 dan bejana
24
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan dari hasil pengujian dapat diambil beberapa kesimpulan
sebagai berikut:
1. Berdasarkan tabel 4.3 apabila salah satu isi bejana lebih tinggi maka salah
satu motor servo mengecilkan katup kran. Dan apabila isi bejana 1 dan
bejana 2 mencapai lebih dari 4 liter maka kedua posisi Motor Servo tertutup.
2. Perancangan alat pada tugas akhir ini berhasil mengendalikan debit air dari
ketinggian yang berbeda menggunakan Mikrokontroler Basic Stamp.
5.2 Saran
Dalam pembuatan alat ini, alat masih jauh dari sempurna, hal itu disebabkan
oleh keterbatasan penulis, penulis memberikan saran bagi pembaca yang berniat
untuk mengembangkan alat ini sebagai berikut:
1. Menggunakan algoritma Kontrol PID sehingga didapat kondisi air yang
sama antara kedua bejana.
2. Mengunakan sensor pengukur ketinggian air yang lebih akurat.
3. Menambahkan indikator serta monitoring ketika kondisi kedua bejana sama
25
DAFTAR PUSTAKA
[1] Anshari Kurniawan. (2012, Mei 8). Fungsi, Jenis, Dan Kelebihan
Potensiometer.Diakses,JuliRabu,2012,Dari,http://landasanteori.blogspot.c
om/2012/05/fungsi-jenis-dakelebihan.html.
[2] Benfany,(2011, Maret 13). Prinsip Kerja Motor Servo , Diakses Mei 12 ,
2011, Dari http://benfanyprojects.blogspot.com/2010/09/prinsip-kerja-
motor-servo-standard-dan.html
[3] Blocher, Richard, Dasar Elektonika, Yogyakarta, 2004.
[4] Christanto, Danny,Kris Pusporini, Panduan Dasar Mikrokontroller
Keluarga MCS-51,Surabaya, 2004.
[5] Dadang, S. (2010,April 13). Interface/Teknik antarmuka. Diakses Maret
18,2011,Dari,http://elektronikadasar.blogspot.com/2009/04/interfaceteknik
-antarmuka.htm.
[6] Joko Untoro (2009, Mei 28). Genius Matematika Kelas 6 SD Sesuai
Kurikulum,Diakses,Maret,102011Darihttp://books.google.co.id/books?id=
_crKIk4rds0C&pg=RA1PA10&lpg=RA1PA10&dq=rumus+debit+air+ma
tematikaUq.
[7] Nico (2009, Juni 28). Tabung . Diakses Januari 21, 2011, Dari https://elnicovengeance.wordpress.com/2011/08/23/tabung/.
[8] Parallax. (2006, Juni 13). Basic Stamp . Diakses Januari 26, 2012, Dari
RIWAYAT HIDUP
Nama : Yophi Ade Chandra
Tempat, tanggal lahir : Lubuk Linggau, 14 Oktober 1988
Jenis kelamin : Laki-laki
Agama : Islam
Alamat : Jl Sejahtera No 46 RT 12 Kel
Taba jemekeh Kec Lubuk Linggau timur.
No. telepon : 081931245421/085316113188
Email : [email protected]
Pendidikan Formal
2008 – 2012 : Universitas Komputer Indonesia, Bandung.
Fakultas Teknik dan Ilmu Komputer, Jurusan Teknik
Komputer.
2003 – 2006 : SMA NEGERI 5 Lubuk Linggau, Sum-Sel 2000 – 2003 : SMP NEGERI 5 Lubuk Linggau, Sum-Sel 1994 – 2000 : SD NEGERI 52 Lubuk Linggau, Sum-Sel
Pengalaman Organisasi