KINERJA TRAKSI MODEL RODA BERSIRIP RAMPING
PADA TANAH BASAH
DEKI PURNAYA
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Kinerja Traksi Model Roda Bersirip Ramping Pada Tanah Basah adalah benar karya saya dengan arahan dari pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Januari 2016
Deki Purnaya
ABSTRAK
DEKI PURNAYA. Kinerja Traksi Model Roda Bersirip Ramping Pada Tanah Basah. Dibimbing oleh WAWAN HERMAWAN
Roda bersirip ramping dibutuhkan traktor tangan atau mesin agar mampu untuk melintas diantara tanaman padi tanpa merusak tanaman tersebut. Tujuan dari penelitian ini adalah untuk menganalisis kinerja traksi roda bersirip ramping pada tanah basah. Model roda ramping yang digunakan berdiamter 42 cm dan lebar sirip 7 cm yang diuji pada apparatus uji bak tanah (soil bin) dengan kondisi tanah basah. Roda diuji pada variasi sudut sirip 30, 40 and 45o, dan pada variasi tinggi sirip 7, 10.5, dan 14 cm. Pada penelitian ini dilakukan juga pengujian terhadap model roda bersirip ramping yang dilengkapi dengan pelampung. Selama pengujian, dilakukan pengukuran terhadap slip roda, ketenggelaman roda (sinkage), gaya tarik, dan torsi roda. Kemudian dilakukan perhitungan terhadap efisiensi traksi roda. Hasil pengujian menunjukan bahwa sudut sirip memiliki pengaruh yang dominan terhadap slip roda, ketenggelaman roda, dan efisiensi traksi. Efisiensi traksi maksimum (24.5%) dihasilkan oleh roda yang menggunakan tinggi sirip 10.5 cm dan sudut sirip 45o. Pemasangan pelampung pada roda dapat meningkatkan efisiensi traksi menjadi 26.68% (dengan pelampung) dari 22.69% (tanpa pelampung) pada roda ramping.
Kata kunci : bak tanah, pelampung, roda bersirip, sirip ramping, tanah basah
ABSTRACT
DEKI PURNAYA. Traction Performance of Narrow Wheel Model on Wet Soil. Supervised by WAWAN HERMAWAN
A narrow lug wheel is needed for a hand tractor or a machine to be able to pass in between paddy plants rows without damaging the plants. The objective of this study was to analyze the traction performance of a narrow lug wheel on a wet soil. A narrow wheel model with wheel diameter of 42 cm and lug width of 7 cm was test on a soil bin apparatus filled with wet soil. The wheel was tested on a variation of lug angle of 30, 40 and 45o, and on a variation of lug height of 7, 10.5 and 14 cm. A model of narrow wheel equipped with floats was also tested in the experiment. During the tests, wheel slip, wheel sinkage, pull force, and wheel torque were measured. Then the wheel tractive efficiency was calculated. The tests results showed that the lug angle has a dominant effect on the wheel slip, sinkage, and tractive efficiency. The maximum tractive efficiency (24.5 %) was obtained by the wheel using lug height of 10.5 cm and lug angle of 45o. The addition of floats on the wheel could increase the traction efficiency to 26.68 % (with buoys) from 22.69% (without buoys) of the narrow wheel.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik
pada
Departemen Teknik Mesin dan Biosistem
KINERJA TRAKSI MODEL RODA BERSIRIP RAMPING
PADA TANAH BASAH
DEKI PURNAYA
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga skripsi ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Maret 2015 ini ialah roda bersirip dengan judul Kinerja Traksi Model Roda Bersirip Ramping Pada Tanah Basah.
Terima kasih penulis ucapkan kepada ayah, ibu, dan seluruh keluarga besar
atas dukungan, do’a dan kasih sayang mereka selama ini. Penulis juga
mengucapkan terimakasih kepada Bapak Dr Ir Wawan Hermawan MS selaku pembimbing, serta Bapak Dr Ir Gatot Pramuhadi MSi dan Bapak Ir Mad Yamin MT selaku penguji yang telah banyak memberikan saran. Di samping itu, penulis juga menyampaikan penghargaan kepada Bapak Udin, Bapak Parma, serta seluruh
staff dan teknisi Laboratorium Lapangan Siswadhi Soepardjo yang telah membantu selama kegiatan penelitian berlangsung. Semoga karya ilmiah ini bermanfaat.
Bogor, Januari 2016
DAFTAR ISI
DAFTAR TABEL ix
DAFTAR GAMBAR ix
DAFTAR LAMPIRAN ix
PENDAHULUAN 1
Latar Belakang 1
Perumusan Masalah 1
Tujuan Penelitian 2
TINJAUAN PUSTAKA 2
Karakteristik Lahan Sawah 2
Roda Bersirip 3
Traksi 5
Ketenggelaman Roda (Sinkage) 6
Slip Roda Traksi 7
METODE 8
Waktu dan Tempat 8
Bahan dan Alat 8
Tahapan Penelitian 11
Perlakuan Pengujian Performansi Roda Bersirip Ramping 12 Pengukuran Pengujian Performansi Roda Bersirip Ramping 12
Kalibrasi Sensor 13
Analisis Disain Model Roda Bersirip Ramping 16
HASIL DAN PEMBAHASAN 17
Slip Roda 17
Sinkage 19
Efisiensi Traksi 20
Pelampung 22
SIMPULAN DAN SARAN 23
Simpulan 23
Saran 23
LAMPIRAN 26
DAFTAR TABEL
1 Jumlah sirip yang dibutuhkan berdasarkan nilai slip lahan yang dilintasi 4 2 Jumlah sirip yang dibutuhkan berdasarkan kondisi lahan yang dilintasi 4 3 Jumlah jari-jari (spoke) yang dibutuhkan (Sakai et al 1987) 5 4 Hasil pengujian performansi roda bersirip ramping 21 5 Perbandingan hasil uji performansi roda berpelampung dan tanpa
pelampung pada sudut sirip 40 derajat tinggi sirip 7 cm 22
DAFTAR GAMBAR
1 Posisi sirip di atas permukaan tanah 4
2 Perlengkapan soil bin untuk pengujian 9
3 (a) roda ramping tanpa pelampung (b) roda ramping dengan pelampung 10 4 (a) sudut sirip 30o (b) sudut sirip 40o (c) sudut sirip 45o 11
5 Skema pengkalibrasian torsi 13
6 Grafik hasil pengkalibrasian torsi 14
7 Skema pengkalibrasian beban tarik 14
8 Grafik hasil pengkalibrasian beban tarik 14
9 Skema pengkalibrasian jarak tempuh dan sinkage roda 15
10 Skema pengkalibrasian jumlah putaran roda 15
11 Grafik hasil pengkalibrasian jarak tempuh dan sinkage roda 16 12 Grafik hasil pengkalibrasian jumlah putaran roda 16 13 Grafik hubungan tinggi dan sudut sirip terhadap slip roda 18 14 Grafik hubungan beban tarik terhadap slip roda 19 15 Grafik hubungan tinggi dan sudut sirip terhadap sinkage 20
16 Grafik hubungan beban tarik terhadap sinkage 20
17 Grafik hubungan tinggi dan sudut sirip terhadap efisiensi traksi 22 18 Grafik hubungan beban tarik terhadap efisiensi traksi 22
DAFTAR LAMPIRAN
1 Hasil pengukuran kadar air dan bulk density tanah sawah padi SRI di
Desa Cikarawang 26
2 Data pengukuran kadar air tanah hasil ayakan 27
3 Data hasil pengkondisian kadar air dan bulk density tanah sawah pada
soil bin 28
4 Data pengujian konsistensi tanah sawah cikarawang 29
5 Analisis penambahan gaya angkat oleh pelampung 30
6 Data pengujian performansi roda bersirip ramping untuk masing-masing variasi sudut dan tinggi sirip di soil bin 32
7 Dimensi model roda berisirip ramping 34
PENDAHULUAN
Latar Belakang
Indonesia merupakan salah satu negara dengan tingkat konsumsi beras tertinggi di dunia. Tingkat konsusmsi beras di Indonesia tercatat sebesar 124.89 kg perkapita per tahun, kondisi ini menuntut ketersediaan beras dalam negeri dengan jumlah yang sangat besar yaitu sebesar 33.368 juta ton (Vivanews 2015). Untuk mengatasi hal tersebut maka perlu dilakukan intensifikasi dan ekstensifikasi pertanian pada lahan padi sawah.
Dalam bidang intensifikasi pertanian lahan sawah, salah satu aspek yang penting untuk ditingkatkan adalah aspek mekanisasi pertanian. Penerapan mekanisasi pertanian harus dilakukan secara menyeluruh terutama pada kegiatan pengolahan lahan dan budidaya yang memerlukan banyak tenaga kerja. Salah satu alat mekanisasi yang banyak digunakan adalah traktor roda dua dan roda empat. Penggunaan traktor roda dua sendiri untuk lahan sawah di Indonesia lebih populer dibandingkan penggunaan traktor roda empat.
Traktor roda dua atau juga sering disebut dengan traktor tangan berdasarkan jenis rodanya dibagi menjadi dua yaitu roda ban karet dan roda besi bersirip (roda sangkar/cage wheel). Traktor tangan dengan jenis roda besi bersirip banyak digunakan untuk kegiatan pengolahan tanah sawah. Lahan sawah di Indonesia umumnya mempunyai kadar air tinggi dan tidak jarang traktor harus dioperasikan pada tanah yang jenuh dan tergenang air sehingga mobilitas traktor di permukaan tanah tersebut terkadang sangat rendah.
Selama ini penggunaan traktor tangan pada lahan sawah relatif terbatas penggunaannya hanya pada kegiatan pengolahan tanah dan tidak digunakan lagi selama kegiatan perawatan seperti pemupukan, penyiangan gulma, dan kegiatan perawatn lainnya. Hal ini sangat disayangkan karena menyebabkan penggunaan traktor tangan tidak optimal sehingga manfaat yang bisa didapatkan oleh para petani dari penggunaan traktor tangan pun tidak bisa maksimal. Seharusnya traktor tangan yang ada saat ini juga bisa dimanfaatkan oleh petani selama kegiatan perawatan berlangsung. Keterbatasan ini salah satunya diakibatkan oleh dimensi dari roda bersirip yang tersedia saat ini memiliki lebar yang jauh lebih besar dari jarak tanam padi pada umumnya, sehingga ketika roda tersebut melintasi tanaman maka akan mengganggu dan merusak tanaman padi. Oleh sebab itu perlu adanya suatu rancangan modifikasi jenis roda bersirip pada traktor tangan berupa roda ramping (narrow wheel) yang mampu melintas di sela-sela tanaman padi tanpa merusak tanaman padi tersebut, namun memiliki traksi yang cukup besar serta menghasilkan sinkage dan slipyang relatif rendah.
Pada penelitian ini dilakukan analisis kinerja traksi roda besi bersirip ramping pada bak uji tanah (soil bin) yang mengacu pada kondisi tanah lahan sawah dengan menggunakan beberapa variasi sudut kemiringan dan tinggi sirip.
Perumusan Masalah
2
perlu adanya suatu rancangan modifikasi jenis roda bersirip pada traktor tangan berupa roda ramping yang mampu melintas di sela-sela tanaman padi tanpa merusak tanam padi tersebut. Berdasarkan hal tersebut, dirumuskan beberapa permasalahan yang diharapkan akan didapatkan solusinya dari penelitian ini, di antaranya adalah:
1. Apakah penggunaan roda ramping dapat menghasilkan traksi yang baik, menghasilkan sinkage dan tingkat slip yang rendah ?
2. Bagaimanakah hubungan antara efisiensi traksi, sinkage dan slip pada roda ramping dengan beban tarik dan tinggi sirip ?
Tujuan Penelitian
Tujuan dari penelitian ini adalah melakukan analisis kinerja traksi model roda bersirip ramping pada tanah basah di soil bin.
TINJAUAN PUSTAKA
Karakteristik Lahan Sawah
Tanah sawah merupakan tipe lahan pertanian dengan permukaan horizontal dan dikelilingi oleh batas-batas untuk menampung dan menjaga agar tanah tetap tergenang oleh air (Sapei 1992). Karakterisitk tanah lahan sawah di antaranya dapat dijelaskakan melalui dua sifat yaitu sifat fisik dan mekanik. Sifat fisik yang umum dipakai sebagai paramter untuk menentukan kondisi tanah antara lain berat isi tanah (bulk density) dan kandungan air tanah. Sifat mekanik tanah antara lain, tahanan penetetrasi dan tahanan geser.
Tanah yang terbaik untuk lahan sawah adalah tanah yang mempunyai kapasitas retensi air yang tinggi serta permeabilitas yang rendah (Lal 1985). Kawaguchi dan Kyuma (1997) dalam Lal (1985) melaporkan bahwa 45% tanah sawah di Asia Selatan dan Tenggara mengandung sedikitnya 45% tanah liat. Tanah liat ini akan sangat keras pada saat kering dan sangat lengket ketika basah. Hal ini akan menurunkan kemampuan mobilitas traktor serta interaksi antara tanah dan implemen tidak baik. Baver (1972) menyatakan bahwa tanah liat dan material humus adalah bagian aktif karena keduanya memiliki permukaan spesifik yang tinggi dan tersusun oleh bahan kimia. Tanah liat ini sedikit aerasi dan tahan tembus air.
Nakano (1985) dalam Budiawan (1995) menunjukkan beberapa kriteria sifat fisik tanah sawah di Jepang antara lain : (1) tekstur tanah berupa lempung berpasir-liat ringan, (2) kedalaman lapisan olah 15-20 cm, sedangkan kedalaman efektifnya 30-50 cm, (3) permeabilitas dengan perkolasi vertikal anatara 15-20 mm/hari (0.0625-0.1402 cm/jam) dan konduktivitas hidrolik antara 10-4-10-5 cm/detik, dan (4) tahanan penetrasi setelah pengolahan atau panen rata-rata ≥ 4 kg/cm2, sedangkan setelah pelumpuran ≥ 2 kg/cm2.
3 (1970) menyatakan bahwa untuk traktor roda dua dapat dioperasikan pada lahan dengan kisaran indeks kerucut tanah (soil cone index) 196-284 kPa pada kedalaman 20 cm. Pada penelitian lainnya disebutkan bahwa besaran indeks kerucut tanah (soil cone index) untuk lapisan keras (hardpan) pada lahan basah berlumpur adalah 492 kPa (Keen et al. 2013)
Roda Bersirip
Jumlah Sirip
Salokhe dan Gee-Clough (1988) menyatakan bahwa roda sirip digunakan untuk meningkatkan traksi dan membantu dalam pengolahan tanah di lahan basah. Total gaya pada roda sirip merupakan fungsi dari jumlah sirip yang menyentuh tanah. Peningkatan jumlah sirip menyebabkan adanya gaya pada roda bertambah hingga mencapai batas tertentu, selebihnya penambahan sirip tersebut dapat menurunkan gaya pada roda.
Gee-Clough dan Chancellor (1976) merumuskan perhitungan gaya angkat dan gaya tarik pada roda bersirip :
Fp = fn sin (θ-ẞ) - ft cos (θ-ẞ) (1)
Ft = fn cos (θ-ẞ)+ft cos (θ-ẞ) (2)
Dalam hal ini Fp adalah gaya tarik (N), Ft adalah gaya angkat (N), fn adalah gaya normal (N), ft adalah gaya tangensial (N), θadalah sudut putaran (0), dan ẞ adalah sudut sirip (0).
Jumlah sirip yang akan digunakan sangat dipengaruhi oleh jarak antar sirip yang diinginkan. Kondisi ini disebabkan karena jarak antar sirip akan sangat jarak horizontal sirip (m), dan S adalah perkiraan slip yang akan terjadi (%).
Selanjutnya Cebro dan Hermawan (2006) juga menyatakan bahwa jarak antar sirip dapat ditentukan dengan menggunakan persamaan berikut.
Sas = 2Rwsin[ � ] (4)
Shs = − ��� � (5)
Dalam hal ini Sas adalah jarak antar sirip (m), Js adalah jumlah sirip, Shs adalah jarak horizontal sirip (m) dan S adalah perkiraan slip roda yang akan terjadi (%).
4
Dalam hal ini N adalah jumlah sirip minimum, V adalah kecepatan maju yang diharapkan (m/s), n adalah kecepatan putar roda (rad/s), Rw adalah jari-jari luar roda (m) dan S adalah perkiraan slip yang akan terjadi (%).
Lebih lanjut Sakai et al (1987) mencoba menentukan jumlah sirip dengan mengkalkulasi pada beberapa nilai slip roda dalam rentang 0.05-0.25. Hasil kalkulasi tersebut sebagaimana tampak pada Tabel 1 berikut. Selain itu Sakai et al
(1998) juga memberikan pendekatan empiris terkait jumlah sirip berdasarkan kondisi lahan yang dilintasi. Pendekatan empiris tersebut terangkum pada Tabel 2. Tabel 1 Jumlah sirip yang dibutuhkan berdasarkan nilai slip lahan yang dilintasi
Nilai slip Jumlah sirip
0.05 20
0.10 40
0.15 12
0.20 10
0.25 9
Tabel 2 Jumlah sirip yang dibutuhkan berdasarkan kondisi lahan yang dilintasi Kondisi lahan Jumlah sirip
Rawa-rawa 6
Berlumpur 6-8
Sawah 8-12
Kering (pegunungan) 8-14
Sudut Sirip
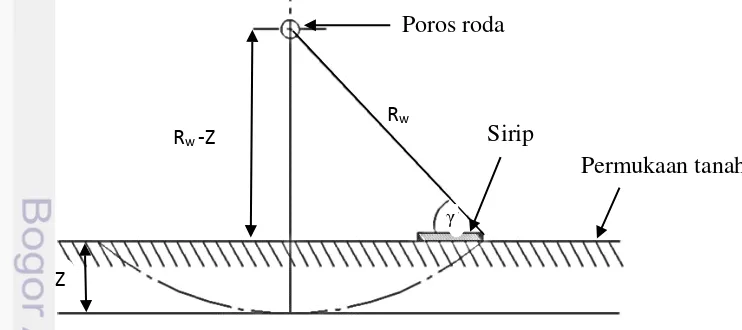
Penentuan sudut sirip sangat mempengaruhi kemampuan sirip dalam menghasilkan gaya vertikal dan horizontal yang baik sehingga posisi sudut sirip ketika bertemu dengan permukaan tanah harus sangat diperhatikan. Posisi sirip yang baik harus persis berada pada permukaan tanah. Seperti tampak pada Gambar 1.
Gambar 1 Posisi sirip di atas permukaan tanah
Rw -Z
Rw
ɣ
Z
Sirip Poros roda
Permukaan tanah
5 Sudut sirip (ɣ) pada Gambar 1 di atas dapat ditentukan dengan persamaan berikut.
γ = sin-1 �−
� (8)
Dalam hal ini γ adalah sudut sirip (o), Rw adalah jari-jari luar roda (m) dan Z adalah sinkage (m).
Selain itu sudut pemasangan sirip atau lug installing angle (αf) juga dapat diketahui dengan analisis geometri seperti yang diajukan oleh Sakai et al (1987) sebagai berikut.
αf = sin-1 �−� −��
(9)
Dimana HL adalah tinggi sirip arah radial yang diukur dari ujung sirip ke pangkal sirip pada rim roda (m), H adalah tinggi total sirip (m), dan RW adalah jari-jari terluar roda (m).
Sakai et al (1987) juga menyatakan bahwa sudut pemasangan sirip (lug installing angle) yang lebih besar dari hasil perhitungan dengan menggunakan persamaan 9 harus dihindari. Hal ini dikarenakan sudut-sudut pemasangan sirip (lug installing angle) yang lebih besar justru akan menyebabkan gaya traksi negatif oleh tanah.
Jari-Jari Sirip (Spoke)
Bagian-bagian lain dari roda yang harus dipertimbangkan dalam proses disain adalah jari-jari roda, atau dalam terminologi yang dipakai oleh Sakai et al
(1987) disebut spoke. Menurut Sakai et al (1987) jumlah spoke bergantung dari seberapa besar diameter roda dan ukuran serta kualitas spoke itu sendiri. Jumlah jari-jari roda (spoke)berdasarkan ukuran diameter roda sebagaimana tampak pada Tabel 3.
Tabel 3 Jumlah jari-jari (spoke) yang dibutuhkan (Sakai et al 1987) Ukuran roda Jumlah jari-jari
Kecil 3
Normal 4-6
Besar 8
Traksi
Traksi adalah gaya dorong yang dapat dihasilkan oleh roda traktor atau alat traksi lainnya (Lilijedahl et al 1979). Arah traksi adalah searah dengan arah gerak traktor dan berlawanan arah dengan tahanan gelinding. Tahanan gelinding terjadi akibat reaksi tanah pada saat roda bergerak.
Performansi yang dapat dihasilkan suatu traktor dipengaruhi oleh kondisi alat traksi, kondisi tanah, keadaan permukaan tanah dan interaksi alat traksi dengan tanah (Wanders 1978). Pada kondisi tanah dan keadaan permukaan tanah tertentu maka faktor yang mempengaruhi traksi dapat dilihat dari segi alat traksi yang meliputi jenis dan keadaan alat traksi serta beban yang diterima (Gill dan vanden Berg 1968).
6
terhadap geseran (shearing), kohesi tanah (pada tanah liat) dan sudut gesekan dalam (internal friction)tanah (pada tanah berpasir). Besarnya gaya traksi akibat reaksi tanah menurut Bekker di dalam Gill dan Venden Berg (1968) ditunjukan oleh persamaan di bawah ini :
Trmaks=Ac + W tan (10)
Dalam hal ini Trmaks adalah gaya traksi maksimum (N), A adalah luas bidang kontak (m2), c adalah kohesi tanah (N/m2), W adalah beban dinamis roda (N), dan adalah sudut gesekan dalam (0).
Persamaan tersebut menunjukan bahwa traksi untuk tanah tertentu dapat ditingkatkan dengan memperluas bidang sentuh roda dengan tanah atau dengan menambah berat traktor (Gill dan Vanden Berg 1968)
Triratanasirichai et al (1990) merumuskan efisiensi traksi sebagaima berikut,
Ƞ = ��� (11)
Dimana P adalah gaya tarik (drawbar pull) (N), v adalah kecepatan maju traktor (m/s), T adalah gaya torsi masukan pada roda (Nm); dan � adalah kecepatan anguler roda (rad/s).
Menurut Hermawan et al (1997) reaksi tanah saat melawan gerak sirip meningkat perlahan-lahan dan mencapai nilai maksimum ketika sirip berada pada titik terendah dalam tanah, lalu menurun tanpa menyebabkan adanya perlawanan gerak sirip sampai sirip meninggalkan tanah. Sinkage terbesar dari gerak sirip terjadi saat gaya reaksi tanah terbesar dan titik kerja gayanya bergeser dari ujung menuju pusat sirip. Peningkatan slip sirip dari 25% sampai 50% memberikan gaya reaksi tanah yang besar terhadap gerak sirip, tapi tidak berpengaruh langsung terhadap titik kerja dari gaya yang dihasilkan.
Ketenggelaman Roda (Sinkage)
Mandang dan Nishimura (1991) menyatakan bahwa kemampuan lalu lintas traktor tidak hanya ditentukan oleh kelunakan dan kelemahan tanah tetapi juga tertantung pada kemampuan alat tersebut untuk bekerja pada kondisi tanpa adanya
sinkage. Kemampuan ini disebut sebagai daya apung kendaraan.
Sinkage adalah terjadinya penurunan permukaan tanah akibat gaya dari luar dengan mengabaikan distribusi dalam tanah khususnya lalu lintas, yang dapat mengakibatkan pemadatan tanah. Penurunan permukaaan terjadi sampai pada keadaan di mana gaya penahan dari tanah seimbang dengan beban yang diberikan. Kenaikan beban dapat menyebabkan kenaikan sinkage (Mandang dan Nishimura 1991). Batas sinkage pada kemampuan lalu lintas traktor maksimum adalah 15-20 cm, tetapi hal ini tergantung pada alat traksi traktor, kondisi profil dan permukaan tanah.
7 Menurut Triratanasirichai (1990), semakin besar slip yang terjadi maka ketenggelaman roda juga akan semakin besar. Sembiring et al (1990) menyatakan bahwa beban tarik roda sangat dipengaruhi oleh adanya kontak antara roda dengan tanah. Kontak antara roda dengan tanah dipengaruhi oleh ukuran roda, berat roda, berat traktor yang ditumpu roda, dan kondisi tanah tumpuan roda. Semakin besar beban tarik maka ketenggelaman roda semakin besar.
Sudianto (2000) dari hasil penelitiannya menyimpulkan bahwa dengan meningkatnya beban horisontal maka nilai ketenggelaman roda cenderung bertambah. Hal ini disebabkan oleh terdeformasinya tanah untuk mengatasi beban tarik yang ditumpu oleh tanah yang ditekan sirip lebih besar pada saat pembebanan mendatar yang besar.
Slip Roda Traksi
Lilijedahl et al (1989) menyatakan bahwa slip merupakan penurunan kecepatan traktor karena beban operasi pada kondisi lapangan. Besarnya slip sangat dipengaruhi oleh tipe alat tarik, tipe dan kondisi tanah, kandungan air tanah, dimensi alat tarik, distribusi tekanan tanah dan lug design. Slip yang terjadi pada traksi traktor dapat diketahui dari pengurangan kecepatan traktor pada saat beroperasi dengan beban dibandingkan dengan kecepatan traktor tanpa beban (kecepatan teoritis). Slip roda traksi dapat dihitung dengan rumus :
S = − ��
. ��� % (12)
Dalam hal ini S adalah slip roda (%), Vf adalah kecepatan maju roda (m/detik), � adalah kecepatan anguler roda (rad/detik), dan � adalah diameter roda (m).
Selain persamaan di atas persamaan lain yang dapat digunakan adalah : S = � −� �
� (13)
Dalam hal ini S adalah slip roda traksi (%), Jriadalah jarak tempuh traktor saat bekerja (m), Jr0 adalah jarak tempuh traktor tanpa beban atau jarak tempuh teoritis (m).
8
sebesar 45o, karena sirip dengan sudut ini tidak menyebabkan kelengketan tanah yang terlalu besar.
Sudianto (2000) dalam penelitiannya menyatakan bahwa jumlah tanah lengket pada sirip roda untuk ketiga tingkat spasi sirip (182.5 mm, 147.4 mm, dan 123.5 mm) umumnya cenderung naik dengan semakin besarnya nilai pembebanan mendatar. Hal ini disebabkan oleh nilai ketenggelaman dan slip roda yang cenderung tinggi pada beban tarik yang tinggi, sehingga volume tanah yang terdorong dan lengket pada sirip menjadi lebih besar.
METODE
Waktu dan Tempat
Penelitian ini dilaksanakan pada bulan Maret 2015 hingga bulan Oktober 2015. Pembuatan model prototipe roda bersirip ramping dilakukan di Bengkel Departemen Teknik Mesin dan Biosistem (TMB), dan pengujian kinerja roda dilakukan di Laboratorium Lapangan Siswadhi Soepardjo, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor
Bahan dan Alat
Tanah
Tanah yang digunakan berasal dari tanah sawah yang terdapat di Desa Cikarawang, Dramaga Bogor. Tekstur tanahnya adalah liat berdebu (Mudzakir 2013). Tanah tersebut diayak dengan ayakan berukuran 2 mm (mesh 10) dan kemudian dikering anginkan. Tanah disiapkan dan dikondisikan pada bak tanah (soil bin) dengan kadar air rata-rata 35% (bb). Pemilihan tingkat kadar air tanah pada percobaan ini didasarkan pada kadar air tanah hasil pengukuran terhadap tanah sawah dengan sistem SRI (System of Rice Intensification) yang ada di Desa Cikarawang, Kabupaten Bogor.
Dalam pengkondisian ini jumlah air yang harus ditambah dalam setiap volume tanah hasil ayakan adalah sebagai berikut.
Mat = (Ka2 x WBD2)-(Ka1 x WBD1) (14)
Dalam hal ini Mat adalah massa air yang harus ditambah (gram), Ka2 adalah kadar air tanah yang ingin dicapai (%bb), WBD2 adalah wet bulk density pada tanah dengan kadar air yang ingin dicapai (g/cm3), Ka1 adalah kadar air tanah hasil ayakan (%bb), dan WBD1 adalah wet bulk density tanah hasil ayakan (gram/cm3).
9
Soil Bin dan Instrumen Ukurnya
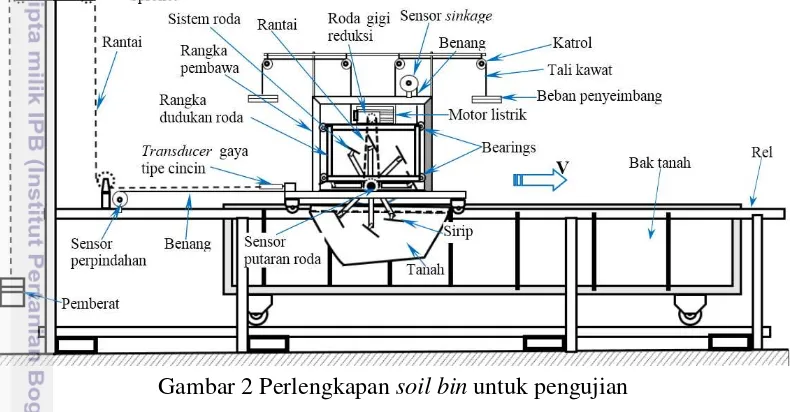
Soil bin yang digunakan berdimensi panjang 180 cm, lebar 35 cm dan kedalaman 30 cm. Perangkat uji soil bin terdiri dari, rangka pembawa yang berfungsi sebagai pembawa roda uji ketika bergerak maju, rangka dudukan roda sebagai tempat dudukan roda uji, motor listrik sebagai sumber tenaga gerak roda uji, gear box sebagai pereduksi kecepatan putar motor listrik, bearing sebagai unit mekanisme untuk menaik-turunkan rangka dudukan roda ketika melintas di bak tanah, rails sebagai tempat lintasan rangka pembawa, sprocket sebagai unit transmisi daya, dan rantai sebagai unit transmisi daya serta penarik beban pemberat.
Alat-alat yang digunakan untuk pengkondisian dan pengukuran tanah percobaan meliputi, alat pengaduk tanah, alat perata tanah, ring sample, literan, dan oven pengering tanah.
Gambar 2 Perlengkapan soil bin untuk pengujian
Instrumen yang digunakan pada pengujian kinerja traksi roda bersirip ramping diantaranya Strain gage 120 ohm, linear potensiometer, transducer gaya tipe cincin, bridge box, stavol 100 volt, multitester, strain amplifier (DAS-406B DC Strain Amp) dan data logger (minilab 1008).
Strain gage 120 ohm digunakan sebagai sensor torsi pada roda uji dan sensor beban tarik pada transducer tipe cincin. Prinsip kerja sensor strain gage
yaitu dengan mengukur perubahan regangan pada sensor strain gage yang diakibatkan oleh perubahan regangan pada poros roda atau regangan pada
transducer tipe cincin. Perubahan regangan ini selanjutnya akan mengakibatkan perubahan voltase yang terbaca pada data logger sehingga besarnya nilai torsi atau beban tarik dapat terukur. Untuk mengukur torsi digunakan sepasang strain gage (tipe cross) yang dipasang menempel pada poros roda. Sedangkan untuk mengukur besarnya gaya tarik digunakan transducer gaya tipe cincin yang telah dipasang sensor strain gage. Transducer gaya tipe cincin yang digunakan salah satu ujungnya dipasang pada rangka pembawa dan ujung lainnya dihubungkan dengan rantai penarik beban.
10
mengukur ketenggelaman roda dan jarak maju, pada bagian ujung pemutarnya dipasang perangkat tambahan berupa benang dan penggulung benang. Untuk mengukur ketenggelaman roda, linear potensiometer diletakkan pada rangka pembawa dan ujung benangnya dikaitkan pada rangka dudukan roda sehingga ketika terjadi pergerakan rangka dudukan maka benang akan ikut tertarik. Untuk mengukur jarak maju, linear potensiometer diletakkan pada rangka soil bin dan ujung benangnya dikaitkan pada rangka pembawa sehingga ketika roda bergerak maju maka benang akan ikut tertarik. Untuk pengukuran sudut putar roda, bagian ujung pemutar linear potensiometer dihubungkan dengan titik pusat poros roda dan bagian badan dihubungkan secara rigid dengan rangka dudukan roda. Ketika roda berputar maka bagian ujung linear potensiometer akan ikut berputar dan menghasilkan perubahan resistansi yang digunakan sebagai dasar penentuan sudut putar roda.
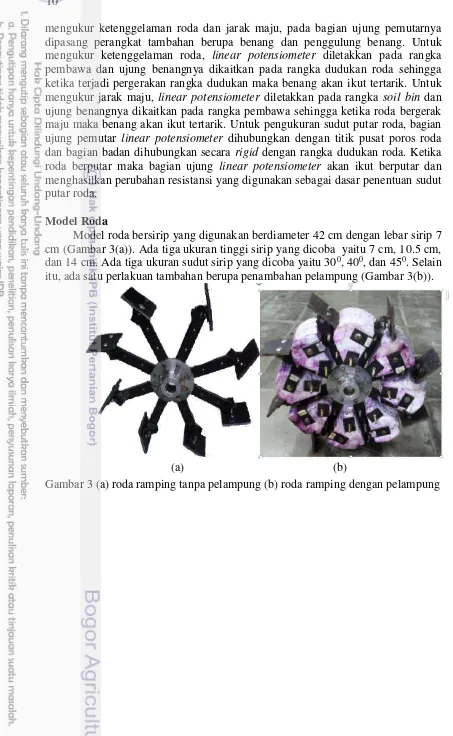
Model Roda
Model roda bersirip yang digunakan berdiameter 42 cm dengan lebar sirip 7 cm (Gambar 3(a)). Ada tiga ukuran tinggi sirip yang dicoba yaitu 7 cm, 10.5 cm, dan 14 cm. Ada tiga ukuran sudut sirip yang dicoba yaitu 300, 400, dan 450. Selain itu, ada satu perlakuan tambahan berupa penambahan pelampung (Gambar 3(b)).
(a) (b)
11
(a) (b) (c)
Gambar 4 (a) sudut sirip 30o (b) sudut sirip 40o (c) sudut sirip 45o
Tahapan Penelitian
Tahapan Pengumpulan Data Input Disain
Tahapan ini meliputi tahap pengumpulan data ukuran dimensi soil bin dan kondisi lahan sawah dengan kriteria lahan minimal 1 bulan setelah tanam. Parameter yang terkait dengan pengukuran kondisi lahan sawah meliputi pengukuran kadar air dan kerapatan isi tanah (bulk density). Nilai kadar air dan kerapatan isi tanah (bulk density)hasil pengukuran pada lahan sawah SRI (System of Rice Intensification) Desa Cikarawang disajikan pada Lampiran 1.
Tahapan Disain Roda Bersirip
Tahapan ini meliputi tahap analisis serta disain dari model roda bersirip ramping yang digunakan dalam penelitian ini berdasarkan parameter-parameter yang terkait.
Tahapan Pembuatan Model Prototipe Roda Bersirip Ramping
Tahapan pembuatan model roda bersirip ramping dilakukan setelah proses disain selesai dilakukan. Pembuatan prototipe model roda bersirip ramping mengacu pada hasil disain yang telah dilakukan sebelumnya.
Tahapan Uji Performansi Roda Bersirip Ramping
12
melakukan pengujian kinerja traksi roda bersirip ramping pada tanah basah yang ada di soil bin.
Perlakuan Pengujian Performansi Roda Bersirip Ramping
Pembebanan Vertikal
Perlakuan pembebanan yang digunakan terdiri dari pembebanan vertikal dan pembebanan horizontal. Perlakuan pembebanan vertikal didasarkan pada berat traktor roda dua yaitu sekitar 250 kg. Berat sebesar itu ditopang oleh dua roda sangkar konvensional, sehingga untuk masing-masing roda menopang beban sebesar 125 kg. Roda sangkar konvensional umumnya memiliki lebar sirip sebesar 35 cm. Karena pengujian menggunakan roda ramping dengan lebar sirip sebesar 7 cm, maka skala perbandingan lebar sirip roda ramping dengan roda konvensional adalah sebesar 1 : 5. Perbandingan ini digunakan sebagai dasar untuk beban vertikal yang digunakan terhadap roda ramping yaitu sebesar 25 kg.
Pembebanan Horizontal
Perlakuan pembebanan horizontal dilakukan dengan dua tahap. Tahap pertama dilakukan pembebanan horizontal dengan memberikan beban pemberat sebesar 5.3 kg terhadap semua variasi sudut dan tinggi sirip. Berdasarkan hasil pengujian tahap pertama maka diperoleh variasi sudut dan tinggi sirip terbaik berdasarkan nilai efisiensi traksi yang dihasilkan. Kemudian selanjutnya pada tahap pengujian kedua, variasi sudut dan tinggi sirip terbaik tersebut dilakukan pengujian beban tarik horizontal dengan beban pemberat sebesar 1 kg, 2 kg, 3 kg, 4 kg, 5.3 kg, 6.6 kg, 8 kg, 10 kg, dan 12 kg yang mengakibatkan slip mencapai sekitar 80-90%.
Variasi Sudut dan Tinggi Sirip
Perlakuan variasi sudut dan tinggi sirip yang digunakan terdiri dari tiga jenis sudut yaitu sudut 30 derajat, 40 derajat, dan 45 derajat. Sedangkan untuk variasi tinggi sirip yang digunakan terdiri dari tinggi sirip 7 cm, 10.5 cm, dan 14 cm. Masing-masing jenis sudut akan diuji menggunakan ketiga jenis tinggi sirip tersebut untuk mendapatkan variasi sudut dan tinggi sirip terbaik.
Pengukuran Pengujian Performansi Roda Bersirip Ramping
Pengukuran Torsi Roda
Pengukuran bertujuan untuk mengetahui besarnya torsi pada roda traksi saat roda bergerak di soil bin. Pengukuran torsi pada roda menggunakan sensor torsi berupa strain gauge. Data hasil pengukuran torsi roda digunakan untuk mengetahui besarnya nilai efisiensi traksi yang dihasilkan oleh roda.
Pengukuran Beban Tarik Horizontal
Pengukuran beban tarik horizontal bertujuan untuk mengetahui besarnya beban tarik horizontal yang dihasilkan roda traksi pada saat roda bergerak pada
13 telah dipasang sensor strain gauge. Data hasil pengukuran beban tarik horizontal digunakan untuk mengetahui besarnya efisiensi traksi yang dihasilkan oleh roda. Pengukuran Slip Roda
Pengukuran slip roda dilakukan dengan cara melakukan pengukuran terhadap jumlah putaran roda dan jarak tempuh roda. Jumlah putaran roda dan jarak tempuh roda diukur menggunakan linear potensiometer. Data hasil pengukuran jumlah putaran roda dan jarak tempuh roda digunakan untuk mengetahui besarnya slip, jarak teoritis roda, jarak aktual roda, kecepatan maju roda dan kecepatan anguler roda.
Pengukuran Sinkage
Pengukuran sinkage roda bertujuan untuk mengetahui besarnya ketenggelaman yang dihasilkan oleh roda traksi. Sinkage roda diukur menggunakan linear potensiometer.
Kalibrasi Sensor
Sensor Torsi
Dalam kalibrasi ini, poros yang telah dipasang strain gauge diberikan torsi yang meningkat secara bertahap mulai dari 0 N.m sampai dengan 54.2 N.m. Perubahan torsi akan mengakibatkan perubahan voltase yang terbaca dari keluaran
strain amplifier. Strain amplifier disetting dengan perbesaran 500 με. Skema pengkalibrasian torsi tampak pada Gambar 5.
Gambar 5 Skema pengkalibrasian torsi
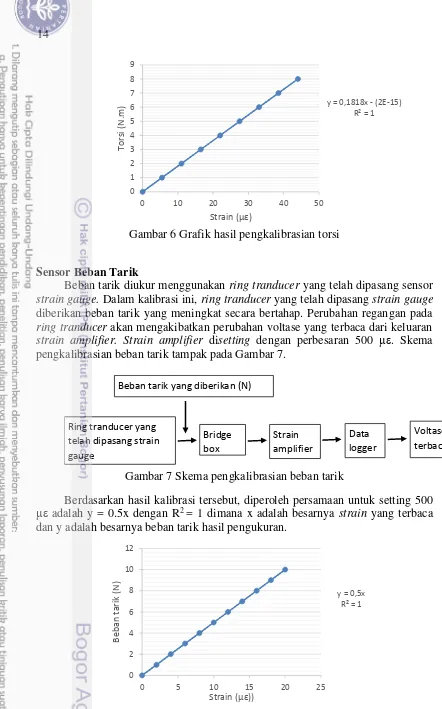
Berdasarkan hasil kalibrasi tersebut, diperoleh persamaan untuk setting 500
με adalah y = 0.1818x - (2E-15) dengan R2 = 1 dimana x adalah besarnya strain
yang terbaca dan y adalah besarnya torsi hasil pengukuran.
Poros yang telah dipasang strain gauge
Bridge box
Strain amplifier
Voltase terbaca Torsi yang diberikan (N.m)
14
Gambar 6 Grafik hasil pengkalibrasian torsi
Sensor Beban Tarik
Beban tarik diukur menggunakan ring tranducer yang telah dipasang sensor
strain gauge. Dalam kalibrasi ini, ring tranducer yang telah dipasang strain gauge
diberikan beban tarik yang meningkat secara bertahap. Perubahan regangan pada
ring tranducer akan mengakibatkan perubahan voltase yang terbaca dari keluaran
strain amplifier. Strain amplifier disetting dengan perbesaran 500 με. Skema pengkalibrasian beban tarik tampak pada Gambar 7.
Gambar 7 Skema pengkalibrasian beban tarik
Berdasarkan hasil kalibrasi tersebut, diperoleh persamaan untuk setting 500
με adalah y = 0.5x dengan R2 = 1 dimana x adalah besarnya strain yang terbaca dan y adalah besarnya beban tarik hasil pengukuran.
Gambar 8 Grafik hasil pengkalibrasian beban tarik
y = 0,1818x - (2E-15) Beban tarik yang diberikan (N)
15
Sensor Jarak Tempuh, Sinkage, dan Jumlah Putaran Roda
Jarak tempuh, sinkage, dan jumlah putaran roda diukur menggunakan linear potensiometer 10 Kohm. Untuk kalibrasi jarak tempuh dan sinkage dilakukan perlakuan berupa penarikan gulungan benang yang telah dipasang pada bagian ujung linear potensiometer dengan penambahan jarak yang meningkat. Penambahan jarak tersebut akan mengakibatkan perubahan voltase yang terbaca pada data logger. Sedangkan untuk kalibrasi jumlah putaran roda dilakukan dengan cara memutar linear potensiometer dengan kelipatan 90 derajat secara bertahap. Perubahan putaran linear potensiometer akan mengakibatkan perubahan
resistansi (tahanan) yang terbaca pada multitester. Berikut skema pengkalibrasian
linear potensiometer untuk jarak tempuh, sinkage dan jumlah putaran roda.
Gambar 9 Skema pengkalibrasian jarak tempuh dan sinkage roda
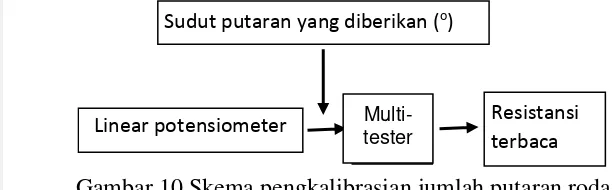
Gambar 10 Skema pengkalibrasian jumlah putaran roda
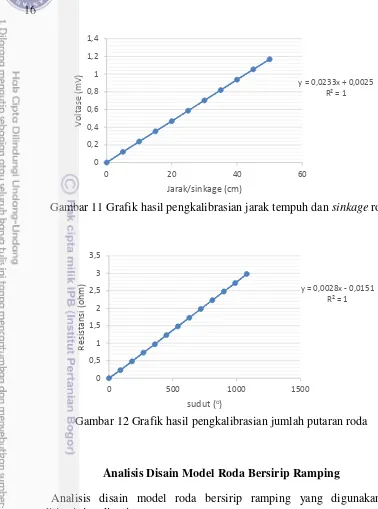
Berdasarkan hasil kalibrasi jarak tempuh dan sinkage pada Gambar 11 diperoleh persamaan y = 0.0233x + 0.0025 dengan R2 = 1 dimana x adalah jarak atau sinkage yang terukur dan y adalah besarnya voltase yang terbaca. Untuk kalibrasi jumlah putaran roda seperti tampak pada Gambar 12 diperoleh persamaan y = 0.0028x – 0.0151 dengan R² = 1 dimana x adalah sudut putar dan y adalah besarnya resistansi yang terbaca.
Linier potensiometer yang telah dipasang lilitan benang
Resistansi terbaca Jarak tarik yang diberikan (cm)
Data logger
Linier potensiometer Resistansi
terbaca
Sudut putaran yang diberikan (o)
Data logger
Jarak tempuh (tarikan tali) yang diberikan (cm)
Multi-16
Gambar 11 Grafik hasil pengkalibrasian jarak tempuh dan sinkage roda
Gambar 12 Grafik hasil pengkalibrasian jumlah putaran roda
Analisis Disain Model Roda Bersirip Ramping
Analisis disain model roda bersirip ramping yang digunakan dalam penelitian ini meliputi :
Penentuan Diameter Roda (D0)
Penentuan diameter roda mengacu pada ukuran maksimum panjang bak uji tanah (soil bin) dan ukuran maksimum celah rangka dudukan roda yang digunakan. Dalam penelitian ini diameter roda yang digunakan sebesar 42 cm. Penentuan Jumlah Jari-Jari Roda atau Spoke
17 Penentuan Jumlah Sirip (N)
Penentuan jumlah sirip minimum (N) menggunakan persamaan 3 dengan parameter input berupa nilai slip roda (S), diameter roda (Dw) dan jarak horizontal antar sirip (Shs). Nilai slip roda yang terjadi diperkirakan sebesar 15% dengan diameter roda 42 cm dan jarak horizontal antar sirip sebesar 14 cm. Berdasarkan data parameter input tersebut maka diperoleh jumlah sirip yang diperlukan sebanyak 8. Selain itu, penentuan jumlah sirip minimum juga dilakukan dengan menggunakan tabel 2. Pada Tabel 2 parameter input yang digunakan berupa kondisi lahan yang akan dilintasi oleh roda traktor. Kondisi lahan yang digunakan pada penelitian ini adalah tanah berlumpur sehingga berdasarkan Tabel 2 tersebut maka jumlah sirip sebesar 8 merupakan jumlah sirip yang baik untuk digunakan Penentuan Sudut Pemasangan Sirip (αf)
Penentuan sudut pemasangan sirip menggunakan persamaan 8 dengan parameter input yang meliputi jari-jari roda (R) dan ketenggelaman roda (Z). Jari-jari roda ditetapkan sebesar 21 cm dengan ketenggelaman roda diperkirakan terjadi pada tiga variasi yaitu 6 cm, 8 cm, dan 10 cm. Berdasarkan data paramter input tersebut maka diperoleh tiga variasi sudut pemasangan sirip yaitu 45 derajat, 40 derajat, dan 30 derajat.
Penentuan Dimensi Sirip
Penentuan lebar sirip dalam penelitian ini didasarkan pada jarak tanam padi sawah sebesar 25 cm. Namun, jarak tanam sebesar 25 cm ini tidak semuanya bisa digunakan sebagai ruang bebas karena diperkirakan terpakai radius rumpun padi sebesar 9 cm. Oleh sebab itu, diperkirakan ruang bebas yang bisa digunkan untuk melintasnya roda traktor sebesar 7 cm. Selanjutnya tinggi sirip dalam penelitian ini ditetapkan sebesar 7 cm, 10.5 cm, dan 14 cm. Pemilihan ini didasarkan pada pengertian roda ramping yaitu lebar sirip harus lebih kecil atau minimal sama dengan tinggi sirip. Oleh sebab itu pada penelitian ini rasio lebar sirip terhadap tinggi sirip ditetapkan sebesar 1, 1.5 dan 2.
Penentuan Tinggi dan Lebar Pelampung
Pada penelitian ini digunakan roda bersirip ramping dengan perangkat tambahan berupa pelampung dalam upaya meningkatkan gaya angkat dari roda bersirip ramping. Pelampung tersebut terletak melingkar mengikuti alur jari-jari (spoke) dari roda yang digunakan. Tinggi pelampung yang digunakan sebesar 10 cm dengan lebar 7 cm. Analisis gaya angkat yang dihasilkan pelampung disajikan dalam Lampiran 5.
HASIL DAN PEMBAHASAN
Slip Roda
Hubungan Tinggi dan Sudut Sirip Terhadap Slip Roda
18
dihasilkan. Berdasarkan grafik tersebut tampak bahwa yang paling berpengaruh terhadap perubahan slip roda adalah perubahan sudut sirip. Kondisi ini terjadi karena variasi tinggi sirip dalam satu jenis sudut memiliki pola pergerakan sirip didalam tanah yang relatif sama, hal ini bisa dibuktikan dengan hasil sinkage yang juga relatif sama. Berbeda halnya dengan perlakuan variasi jenis sudut, pada kondisi ini slip roda relatif meningkat dengan semakin besarnya sudut yang digunakan. Berdasarkan Gambar 13 tampak bahwa sudut sirip 30 derajat memiliki slip roda yang relatif lebih rendah dibandingkan dengan sudut sirip 40 dan 45 derajat, namun untuk perbandingan slip roda pada variasi sudut 40 derajat dan 45 derajat tidak mengalami peningkatan slip yang cukup signifikan. Hal ini diakibatkan oleh gaya reaksi tanah arah horizontal yang akan semakin meningkat dengan semakin kecilnya sudut sirip sehingga akan mengakibatkan slip pada roda semakin kecil. Berdasarkan grafik tersebut tampak bahwa nilai slip roda terkecil dihasilkan oleh sirip roda dengan sudut sirip 30 derajat.
Gambar 13 Grafik hubungan tinggi dan sudut sirip terhadap slip roda Hubungan Beban Tarik Terhadap Slip Roda pada Sudut Sirip 45 Derajat dengan Tinggi Sirip 10.5 cm
Berdasarkan grafik pada Gambar 14 tampak bahwa hubungan peningkatan beban tarik dan slip roda pada sudut sirip 45 derjat dengan tinggi sirip 10.5 cm adalah berbanding lurus. Hal ini mengakibatkan dengan meningkatnya beban tarik maka slip roda yang terjadi juga akan semakin meningkat. Kondisi ini diakibatkan karena peningkatan beban tarik akan menyebabkan peningkatan gaya tekan sirip arah horizontal pada saat roda berputar. Peningkatan gaya tekan sirip arah horizontal menyebabkan sirip akan terus menekan tanah sampai tanah tersebut memberikan gaya reaksi tanah arah horizontal yang sama dengan gaya tekan sirip. Kondisi ini mengakibatkan sirip roda semakin dalam menekan tanah sehingga jumlah putaran roda semakin meningkat dan jarak tempuh roda akan semakin pendek. Semua kondisi tersebut akan mengakibatkan slip roda menjadi meningkat. Selain itu, peningkatan beban tarik juga mengakibatkan peningkatan kelengketan tanah pada sirip roda. Peningkatan kelengketan tanah pada sirip roda ini akan mengakibatkan pengurangan gaya angkat dan gaya dorong pada sirip sehingga mengakibatkan peningkatan pada slip roda. Tampak pada Gambar 14 bahwa variasi beban tarik maksimum pada sudut sirip 45 derajat dengan tinggi sirip 10.5
19 cm yang menghasilkan slip roda kurang dari 50% adalah beban tarik sebesar 112 Newton.
Gambar 14 Grafik hubungan beban tarik terhadap slip roda
Sinkage
Hubungan Tinggi dan Sudut Sirip Terhadap Sinkage
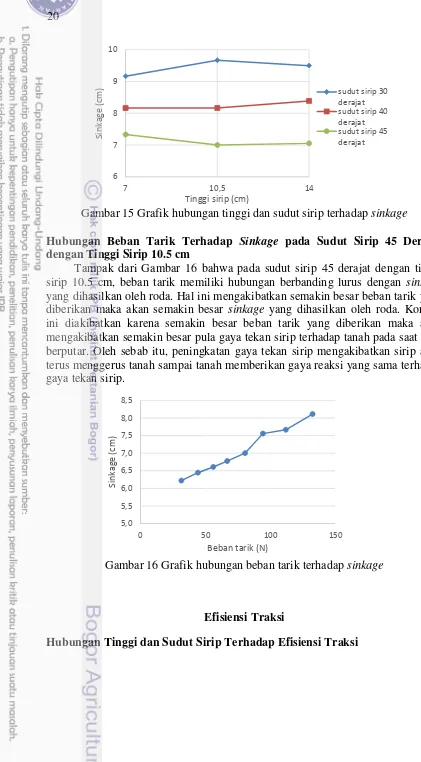
Tampak dari Gambar 15 bahwa pada beban tarik yang sama, peningkatan tinggi sirip dalam satu variasi sudut tidak terlalu berpengaruh terhadap perubahan tingkat kedalaman sinkage yang dihasilkan. Kondisi ini kemungkinan diakibatkan karena penambahan tinggi sirip yang dilakukan mengarah ke arah dalam roda dan bukan mengarah ke arah luar roda sehingga dengan kondisi seperti ini bisa mengakibatkan pola pergerakan sirip yang relatif sama selama sirip tersebut berada di dalam tanah. Peningkatan variasi panjang sirip ke arah dalam roda bertujuan untuk mempertahankan diameter setiap roda yang diuji agar tetap sama. Perubahan sudut sirip seperti tampak pada Gambar 15 memiliki pengaruh yang cukup signifikan terhadap perubahan kedalaman sinkage yang dihasilkan oleh roda. Peningkatan besarnya sudut sirip memiliki hubungan terbalik dengan kedalaman sinkage yang dihasilkan. Hal ini artinya, semakin besar sudut sirip maka kedalaman sinkage yang dihasilkan roda akan cenderung relatif lebih kecil. Kondisi ini diakibatkan karena semakin besar sudut sirip, maka sudut yang dibentuk oleh sirip pada saat menekan tanah semakin kecil sehingga luas permukaan kontak sirip terhadap permukaan tanah semakin besar. Kondisi ini akan mengakibatkan gaya vertikal (gaya angkat) yang dihasilkan oleh sirip semakin besar. Berdasarkan Gambar 15 sinkage terendah dihasilkan oleh sudut sirip 45 derajat dengan panjang sirip 10.5 cm
20
Gambar 15 Grafik hubungan tinggi dan sudut sirip terhadap sinkage
Hubungan Beban Tarik Terhadap Sinkage pada Sudut Sirip 45 Derajat dengan Tinggi Sirip 10.5 cm
Tampak dari Gambar 16 bahwa pada sudut sirip 45 derajat dengan tinggi sirip 10.5 cm, beban tarik memiliki hubungan berbanding lurus dengan sinkage
yang dihasilkan oleh roda. Hal ini mengakibatkan semakin besar beban tarik yang diberikan maka akan semakin besar sinkage yang dihasilkan oleh roda. Kondisi ini diakibatkan karena semakin besar beban tarik yang diberikan maka akan mengakibatkan semakin besar pula gaya tekan sirip terhadap tanah pada saat roda berputar. Oleh sebab itu, peningkatan gaya tekan sirip mengakibatkan sirip akan terus menggerus tanah sampai tanah memberikan gaya reaksi yang sama terhadap gaya tekan sirip.
Gambar 16 Grafik hubungan beban tarik terhadap sinkage
Efisiensi Traksi
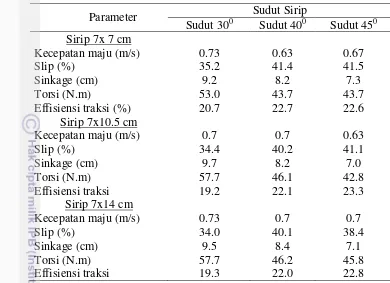
21 Tabel 4 Hasil pengujian performansi roda bersirip ramping
Berdasarkan Tabel 4 dan Gambar 17 tampak bahwa sudut sirip 30 derajat dan 40 derajat dengan besar gaya tarik yang sama, nilai efisiensi traksi pada tinggi sirip 7 cm memiliki kecenderungan yang lebih besar dibandingkan dengan nilai efisiensi traksi pada tinggi sirip 10.5 cm dan 14 cm. Kondisi ini diakibatkan karena kedalaman sinkage yang dihasilkanoleh sirip dengan sudut sirip 30 dan 40 derajat rata-rata diatas 8 cm, sehingga rolling resistance pada tinggi sirip 7 cm lebih kecil dibandingkan dengan tinggi sirip 10.5 dan 14 cm. Hal ini mengakibatkan torsi yang dihasilkan oleh sirip dengan tinggi 7 cm lebih kecil dibandingkan dengan torsi yang dihasilkan oleh tinggi sirip 10.5 dan 14 cm. Namun, untuk tinggi sirip 10.5 dan 14 cm memiliki kecenderungan nilai efisiensi yang tidak terlalu jauh berbeda. Hal ini disebabkan karena kedalaman sinkage
yang dihasilkan maksimal 10 cm sehingga ada sebagian dari sirip yang tidak masuk ke dalam tanah. Kondisi ini mengakibatkan kinerja traksi dan rolling resistance dari sirip dengan tinggi 10.5 dan 14 cm menjadi relatif sama.
Tampak pada Tabel 4 dan Gambar 17 bahwa sudut sirip 45 derajat memiliki pola kecenderungan yang berbeda dengan sudut sirip 30 dan 40 derajat. Pada sudut sirip 45 derajat, nilai efisiensi traksi ketiga jenis variasi sirip tersebut memiliki kecenderungan nilai yang berdekatan. Hal ini diakibatkan karena kedalaman sinkage yang dihasilkan dari ketiga variasi sudut sirip tersebut relatif sama yaitu sebesar 7 cm sehingga mengakibatkan pola pergerakan sirip di dalam tanah dan gaya angkat serta gaya dorong pada sirip yang relatif sama.
Berdasarkan grafik tersebut tampak bahwa yang paling berpengaruh terhadap perubahan efisiensi traksi adalah perubahan sudut sirip. Efisiensi traksi terbaik yang tampak dari grafik tersebut adalah yang dihasilkan dari sudut sirip 45 derajat dengan tinggi sirip 10.5 cm.
22
Gambar 17 Grafik hubungan tinggi dan sudut sirip terhadap efisiensi traksi
Hubungan Beban Tarik Terhadap Efisiensi Traksi pada Sudut Sirip 45 Derajat dengan Tinggi Sirip 10.5 cm
Berdasarkan Gambar 18 tampak bahwa adanya suatu fenomena peningkatan efisiensi traksi dengan penambahan beban tarik tertentu sampai mencapai titik maksimum yang kemudian diikuti dengan penurunan efisiensi traksi. Penurunan efisiensi traksi akan terjadi apabila dilakukan penambahan beban tarik setelah efisiensi traksi mencapai titik maksimum. Berdasarkan gambar tersebut tampak bahwa beban tarik yang menghasilkan nilai efisiensi traksi maksimum pada sudut sirip 45 derajat dengan tinggi sirip 10.5 cm adalah 94 Newton dengan nilai efisiensi traksi maksimumnya sebesar 24.5%.
Gambar 18 Grafik hubungan beban tarik terhadap efisiensi traksi
Pelampung
Tabel 5 Perbandingan hasil uji performansi roda berpelampung dan tanpa pelampung pada sudut sirip 40 derajat tinggi sirip 7 cm
Uraian Dengan Pelampung Tanpa Pelampung
23
Tabel 5 menyatakan bahwa untuk sudut 40 derajat dengan tinggi sirip 7 cm, roda ramping hasil pengujian dengan menggunakan konfigurasi tambahan berupa pelampung lebih baik daripada roda ramping tanpa pelampung. Hal ini dibuktikan dengan slip roda dan sinkage yang dihasilkan oleh roda ramping dengan tambahan pelampung lebih rendah dibandingkan dengan slip roda dan
sinkage yang dihasilkan oleh roda ramping tanpa pelampung. Selain itu, efisiensi traksi roda dengan tambahan pelampung lebih besar dibandingkan dengan efisiensi traksi roda tanpa pelampung. Kondisi ini diakibatkan karena pelampung pada roda ramping dapat meningkatkan gaya angkat pada roda sehingga kedalaman sinkage roda akan menurun. Selain itu, pelampung pada roda ramping juga menghasilkan traksi tambahan pada saat roda bergerak di tanah berlumpur sehingga bisa menurunkan slip roda dan meningkatkan efisiensi traksi.
SIMPULAN DAN SARAN
Simpulan
1. Tinggi sirip kurang memiliki pengaruh terhadap perubahan slip roda, ketenggelaman roda (sinkage), dan efisiensi traksi.
2. Sudut sirip memiliki pengaruh dominan terhadap perubahan slip roda, ketenggelaman roda (sinkage), dan efisiensi traksi.
3. Ukuran sirip dan sudut sirip optimum dihasilkan oleh sirip berdimensi lebar 7 cm dan tinggi sirip 10.5 cm dengan sudut sirip 45derajat
4. Nilai efisiensi traksi maksimum pada ukuran sirip dan sudut sirip optimum adalah sebesar 24.5 %.
5. Penambahan pelampung pada roda dapat meningkatkan efisiensi traksi dari roda ramping
Saran
Dari hasil penelitian yang telah dilakukan masih memerlukan banyak perbaikan untuk memperoleh hasil efisiensi traksi yang lebih sempurna, untuk itu perlu disarankan.
1. Penelitian lebih lanjut tentang roda ramping untuk mengetahui efisiensi traksi maksimum pada sudut sirip 30 derajat dan 40 derajat, serta pengaruh peningkatan beban tarik pada masing-masing sudut tersebut terhadap tingkat efisiensi traksi yang dihasilkan.
2. Penelitian lebih lanjut tentang bentuk, posisi, ukuran, dan bahan pelampung pada roda ramping yang lebih baik.
24
DAFTAR PUSTAKA
Aprilia R. 2015. 2015 Indonesia Surplus Beras. [internet]. [diacu 15 Desember 2015] Tersedia dari: http://nasional.news.viva.co.id/news/read/647096-2015-indonesia-surplus-beras.
Baver LD, Garder WF. 1972. Soil Physics (Fourt Edition). (US): John Wiley and Son.
Budiawan EH. 1995. Pengaruh pengolahan tanah terhadap sifat fisik dan mekanik tanah sawah baru di areal infrastruktur leuwikopo Dramaga Bogor (Skripsi). Bogor (ID): Program Sarjana, Institut Pertanian Bogor.
Cebro IS, Hermawan W. 2006. Sistem desain dengan bantuan komputer untuk roda besi bersirip traktor dua-roda. Jurnal Keteknikan Pertanian. 20(2):139-148.
Daywin FJ, Sitompul RG, Hidayat I. 1993. Mesin-Mesin Budidaya Pertanian. Bogor (ID): JICA IPB.
Gee-Clough D, Chancellor W. 1976. Pull and lift characteristics of single lugs on rigid wheels ain wet rice soil. Journal of the ASAE 19(3): 433-441,447. Gill WR, Vandenberg GE. 1968. Soil Dinamic in Tillage and Tractions. (US):
Agricultural Research Service United State Departemen of Agricultural. Hermawan W, Oida A, Yamazaki M. 1997. The characteristics of soil reaction
forces on a single movable lug. Journal of Terramechanics. 34(1):23-35. Kokobun K. 1970. Relations between trafficability and physical properties of soil
in paddy field. Journal of Agricultural Engineering Research. 5(3):33-37. Lal R. 1985. Priciples of Soil Physics. New York (US): Marcel Dekker.
Lilijedahl JB, Carleton WM, Turnquist PK, Smith DW. 1979. Tractor and Their Power Units 3th Edition. New York (US): John Willey and Sons.
Lilijedahl JB, Turnquis PK, Smith DW, Hoki M. 1989. Tractor and Their Power Unit 4th Edition. New York (US): AVI Book.
Macmillan, RH. 2002. The Mechanics of Tractor-Implement Performance.
Melbourne (AU): University of Melbourne.
Mandang T, Nishimura I. 1991. Hubungan Tanah dan Alat Pertanian. Bogor (ID): JICA IPB.
Mudzakir A. 2013. Karakteristik reaksi tanah sawah dan lumpur terhadap penekanan plat (Skripsi). Bogor (ID): Program Sarjana, Institut Pertanian Bogor.
Sakai J, Kishimoto T, Phongsupasamit S. 1987 A study on engineering design theories of iron wheels for plowing. Agricultural Mechanization in Asia, Africa and Latin America. 18(4):11-18.
Sakai J, Sitompul RG, Sembiring EN, Setiawan RPA, Suastawa IN, Mandang T. 1998. Traktor 2-Roda. Bogor (ID): TEP IPB.
Salokhe V, Gee-Clough D. 1988. Coating of cage wheel luighs to reduce soil adhesion. Journal of Agricultural Engineering. Res 41:201-210.
Salokhe VM, Ghazali A. 1992. The effect of a float on power tiller performance.
Journal of Terramechanics. 29(3):329-339.
25 Sembiring EN, Suastawa I, Desrial. 1990. Sumber Tenaga Tarik di Bidang
Pertanian. Bogor (ID): JICA IPB.
Sudianto D. 2000. Perancangan dan Pengukuran Kemampuan Traksi Roda Bersirip Gerak dengan Sirip Berpegas dan Sirip Karet pada Tanah Basah (Skripsi). Bogor (ID): Program Sarjana, Institut Pertanian Bogor.
Triratanasirichai K, Oida A, Honda M. 1990. The performance of cage wheels for small power tiller. Journal of Terramechanics. 27(3):193-205.
26
Lampiran 1 Hasil pengukuran kadar air dan bulk density tanah sawah padi SRI di Desa Cikarawang
Titik Kedalaman (cm)
Massa basah (gram)
Massa kering (gram)
Berat ring (gram)
Volume ring (cm3)
ka (%bb)
Dry bulk density (gram/cm3)
1 0 – 5 232.4 175.1 85.3 98.11 38.9 0.915
5 - 10 241 190.2 84.4 98.11 32.4 1.078
10 – 15 250 200.5 85.4 98.11 30.1 1.173
2 0 – 5 234.5 177.2 91.3 98.11 40.0 0.875
5 - 10 237.1 182.5 85.7 98.11 36.0 0.986 10 - 15 237.1 185.1 91.5 98.11 35.7 0.954
3 0 - 5 222.5 162.1 85.6 98.11 44.1 0.779
5 - 10 238.4 186 84.3 98.11 34.0 1.036
10 - 15 258.3 215.1 85.4 98.11 24.9 1.321
4 0 - 5 238.7 181.8 85.4 98.11 37.1 0.982
5 - 10 241.9 186.4 84.8 98.11 35.3 1.035 10 - 15 246.7 189 85.5 98.11 35.8 1.054
5 0 - 5 231.3 173.2 85.8 98.11 39.9 0.890
5 - 10 239 188.2 78.1 98.11 31.5 1.122
10 - 15 242.1 191.9 85.6 98.11 32.0 1.083
27 Lampiran 2 Data pengukuran kadar air tanah hasil ayakan
Titik
Massa basah (gram)
Massa kering (gram)
Berat ring (gram)
Volume ring (cm3)
ka (%bb)
Dry bulk density (gram/cm3)
1 148.1 139.9 64.4 88.6 9.8 0.851
2 145.8 137.9 62.8 87.6 9.5 0.857
3 147.1 138.6 63.6 90.4 10.2 0.829
28
Lampiran 3 Data hasil pengkondisian kadar air dan bulk density tanah sawah pada soil bin
Titik Kedalaman (cm)
Massa basah (gram)
Massa kering (gram)
Berat ring (gram)
Volume ring (cm3)
ka (%bb)
Dry bulk density (gram/cm3)
1 0-10 247.9 192.8 85.6 98.1 33.9 1.09
10 - 20 247.1 191.8 86.7 98.1 34.5 1.07
2 0 - 10 246.7 191.3 85.3 98.1 34.3 1.08
10 - 20 242.4 187 85.8 98.1 35.4 1.03
3 0 - 10 246.1 190.8 85.7 98.1 34.5 1.07
5 - 10 244.5 189 85.5 98.1 34.9 1.05
29 Lampiran 4 Data pengujian konsistensi tanah sawah cikarawang
Tabel hasil pengujian batas cair (BC) tanah sawah cikarawang Cawan Jumlah
Dimana kan adalah kadar air tanah, n adalah jumlah ketukan
30
Lampiran 5 Analisis penambahan gaya angkat oleh pelampung
Gambar analisis gaya angkat pada pelampung
Tabel hasil analisis gaya angkat berbagai jenis pelampung Z
Contoh perhitungan gaya angkat pelampung pada sinkage 10 cm dan lebar pelampung 7 cm Luas juring terpakai = Luas juring total – Luas segitiga terpotong
= 449.3 cm2– 196.9 cm2 = 252.4 cm2 Volume juring terpakai = Luas juring terpakai * lebar pelampung
= 252.4 cm2 x 7 cm = 1766.8 cm3
31 Lampiran 5 (lanjutan)
= 1766.8 cm3 x 1.57 g/cc = 2773,876 gram = 2.8 kg Keterangan:
X = Lebar pelampung (cm)
Z = Sinkage (cm)
ρ = wet bulk density (g/cc) A = luas lingkaran roda (cm2) R = Jari-jari roda (cm)
L = Jarak dari titik pusat sampai ke permukaan tanah (cm)
ϴ = sudut juring (0)
32
Lampiran 6 Data pengujian performansi roda bersirip ramping untuk masing-masing variasi sudut dan tinggi sirip di soil bin
33 Lampiran 6 (lanjutan) Data pengujian performansi roda bersirip ramping pada
sudut sirip 40 derajat dengan tinggi sirip 10.5 cm di soil bin
36
RIWAYAT HIDUP
Penulis dilahirkan di Way Abung, 20 Juni 1993 yang merupakan anak ke tiga dari empat bersaudara dari pasangan Bapak Saukat dan Ibu Neli Suryani. Penulis menamatkan SMA pada tahun 2011 dari SMAN 1 LIWA dan pada tahun yang sama diterima di IPB melalui jalur Seleksi Nasional Masuk Perguruan Tinggi Negeri (SNMPTN) jalur undangan pada jurusan Teknik Mesin dan Biosistem. Selama perkuliahan penulis juga aktif sebagai anggota kegiatan mahasiswa dalam club IPB Farmer Student (IFAST) pada tahun 2011-2012. Penulis juga aktif dalam kegiatan pekan kreatifitas mahasiswa (PKM) yang diselenggarakan oleh DIKTI dan menjadi salah satu proposal yang terdanai pada tahun 2014 dan 2015.
Pada tahun 2014 penulis melakukan praktik lapangan di PTPN VII Unit
Bekri, Lampung Tengah dengan judul “Aplikasi Mesin pada Budidaya dan
Pengolahan Kelapa Sawit di PTPN VII Unit Bekri”. Pada tahun 2015, penulis menjadi asisten praktikum pada mata kuliah Teknik Mesin dan Budidaya Pertanian. Sebagai salah satu syarat memperoleh gelar Sarjana Teknik, penulis