ABSTRAK
DESAIN DAN REALISASI ALAT UKUR MASSA JENIS MINYAK KELAPA SAWIT MENGGUNAKAN SENSOR OPTIK BERBASIS MIKROKONTROLER ATMEGA 8535 DAN AKUISISINYA PADA
KOMPUTER
Oleh
MIFTAHUL JANNAH
Telah direalisasikan sebuah alat ukur massa jenis minyak goreng kelapa sawit menggunakan sensor optik berbasis mikrokontroler ATMEGA 8535 dan akuisisinya pada komputer. Pada penelitian ini menggunakan dua perangkat yaitu perangkat keras dan perangkan lunak. Perangkat keras terdiri dari rangkaian sensor, rangkaian sistem minimum mikrokontroler ATMEGA 8535. Sensor optik yang digunakan ialah LDR (Light Dependent Resistor) sebagai receiver dan menggunakan LED sebagai transmitter Rangkaian sensor digunakan untuk mendeteksi massa benda berupa intensitas cahaya yang terdiri dari sensor LDR dn LED yang menghasilkan keluaran berupa tegangan. Sinyal analog yang dihasilkan oleh LDR memiliki rentang 3,99 – 4,51 volt, nilai keluaran ini cukup besar sehingga tidak perlu menggunakan pengkondisi sinyal. Sinyal keluaran selanjutnya menjadi inputan pada mikrokontroler dan diubah kedalam sinyal digital oleh ADC yang terdapat pada mikrokontroler ATMEGA 8535. Sinyal keluaran dari mikrokontroler ATMEGA 8535 akan dikirim menggunakan K-125 ke PC selanjutnya diproses sehingga didapatkan kesetaraan nilai massa dengan ADC dan dilakukan proses perhitungan massa jenis menggunakan bantuan program Visual Basic 6.0 dan ditampilkan ke monitor PC. Perangkat lunak yang digunakan pada penelitian ini adalah BASCOM AVR untuk pemrograman mikrokontroler dan Visual Basic 6.0 untuk program komunikasi serial komputer. Adapun range pengukuran pada alat ini yaotu untuk massa memiliki batasan 0,05 – 2,80 kg dan volume antara 0,10 – 1,80 liter.
DESAIN DAN REALISASI ALAT UKUR MASSA JENIS MINYAK GORENG KELAPA SAWIT MENGGUNAKAN SENSOR OPTIK BERBASIS MIKROKONTROLER ATMEGA 8535 DAN AKUISISINYA
PADA KOMPUTER (Skripsi)
Oleh
MIFTAHUL JANNAH
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS LAMPUNG
DESAIN DAN REALISASI ALAT UKUR MASSA JENIS MINYAK GORENG KELAPA SAWIT MENGGUNAKAN SENSOR OPTIK BERBASIS MIKROKONTROLER ATMEGA 8535 DAN AKUISISINYA
PADA KOMPUTER
Oleh
MIFTAHUL JANNAH
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar Sarjana Sains
Pada Jurusan Fisika
Fakultas Matematika dan Ilmu Pengetahuan Alam
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS LAMPUNG
MENGESAHKAN
1. Tim Penguji
Ketua : Dr. Warsito, D.E.A. ...
Sekretaris : Gurum Ahmad Pauzi, S.Si, M.T ...
Penguji
BukanPembimbing : Drs. Amir Supriyanto, M.Si ...
2. Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam
Prof. Suharso, Ph.D.
NIP. 19690530 199512 1 001
PERNYATAAN
Dengan ini saya menyatakan bahwa dalam skripsi ini tidak terdapat karya yang pernah dilakukan orang lain dan sepanjang pengetahuan saya juga tidak terdapat karya atau pendapat yang ditulis atas diterbitkan oleh orang lain kecuali yang secara tertulis diacu dalam naskah ini sebagaimana disebutkan dalam daftar pustaka, selain itu saya menyatakan pula bahwa skripsi ini dibuat oleh saya sendiri.
Apabila pernyataan yang saya buat ini tidak benar, saya bersedia dikenai sanksi sesuai dengan hukum yang berlaku
Bandar Lampung, Maret 2013
RIWAYAT HIDUP
Penulis dilahirkan di Baturaja, OKU Sumatera Selatan pada tanggal 4 April 1989, anak kedua dari pasangan M. Rasyid Akib (Alm) dan Cik Imah, S.Pd. Penulis menyelesaikan pendidikan di TK Pertiwi Pekalongan pada tahun 1995, SD N 7 Bandar Jaya pada tahun 2001, SMP N 3 Terbanggi Besar pada tahun 2004 dan SMA N 1 Terusan Nunyai 2007. Pada tahun 2007 penulis terdaftar sebagai mahasiswi di Jurusan Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Lampung melalui jalur Seleksi Penerimaan Mahasiswa Baru (SPMB).
MOTTO
“Kegagalan adalah KesuKsesan yang
PERSEMBAHAN
Dengan mengucap rasa syukur kepada Allah SWT, karya kecil ini
kupersembahkan untuk
Alm Papa Tercinta
Terimakasih Papa atas kasih sayang, dukungan moral, dan materi yang telah
diberikan hingga akhir hayat
Mama Tersayang
Terima kasih atas kesabaran dan kasih sayang serta dukungan moral
dan materi yang telah diberikan
Kakak dan Adik-adikku
Terima kasih atas doa dan dukungannya selama ini.
Bapak-Ibu guru serta Bapak-Ibu dosen,,
Terima kasih atas bekal ilmu pengetahuan dan budi pekerti
yang telah ditanamkan.
Para sahabat dan teman-teman seperjuangan,,
Terima kasih untuk kerjasama yang telah kita lalui.
dan
SANWACANA
Assalamu’alaikum Wr.Wb
Puji syukur senantiasa penulis panjatkan kehadirat Allah SWT, Tuhan pencipta langit dan bumi serta penguasa semesta alam, karena atas kuasa-Nya penulis masih diberi kesempatan untuk mengucapkan terima kasih kepada :
1. Bapak Dr. Warsito, D.E.A. selaku Pembimbing I, terima kasih atas bimbingan dan kepercayaannya untuk melakukan penelitian dengan tema ini. 2. Bapak Gurum Ahmad Pauzi, S.Si, M.T. selaku Pembimbing II dan
Pembimbing Akademik.
3. Bapak Drs Amir Supriyanto M.Si selaku dosen Penguji 4. Ibu Dr Yanti Yulianti M,Si selaku Ketua Jurusan Fisika.
5. Bapak Prof. Suharso, Ph.D. selaku Dekan FMIPA Universitas Lampung. 6. Dosen dan Karyawan di Jurusan Fisika FMIPA Unila.
7. Mama, Kakak dan Adik-Adikku yang telah memberikan semangat,dukungan. 8. Teman-teman yang tidak bisa saya sebutkan satu persatu serta semua pihak
yang telah membantu penulis selama penelitian ini.
DAFTAR ISI
F. Mikrokontroler ATMega 8535 15
G. Hukum Hooke 17
H. Hukum Ohm 20
I. Massa Jenis 21
J. Pemograman Visual Basic 6.0 23
III. METODOLOGI PENELITIAN
A. Tempat dan Waktu Penelitian 25
B. Alat dan Bahan 25
IV. HASIL PENELITIAN DAN PEMBAHASAN
A. Hasil Penelitian 32
B. Pembahasan 33
V. KESIMPULAN
DAFTAR TABEL
Tabel Halaman
3.1 Pengukuran Massa 31
4.1 Tabel Pengujian Sensor 34
4.2 Tabel Pengujian LDR dengan ADC 36
DAFTAR GAMBAR
Gambar 2.1 Simbol LDR dan Bentuk LDR 8
Gambar 2.2 Saat Cahaya LED mengenai LDR 11
Gambar 2.3 Rangkaian LDR 12
Gambar 2.4 LED dan Simbolnya 13
Gambar 2.5 Mikrokontroler Atmega 8535 15
Gambar 2.6 Konfigurasi Pin Atmega 8535 16
Gambar 2.7 Sistem Pegas Hukum Hooke 18
Gambar 2.8 Pegas saat normal, ditekan, dan memberikan gaya reaksi 19
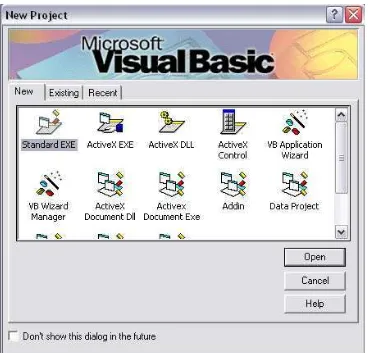
Gambar 2.9 Tampilan Awal Visual Basic 6.0 24
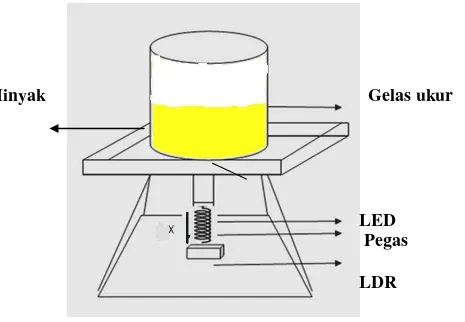
Gambar 3.1 Rancangan Sistem Mekanik Alat Ukur Massa Jenis Zat Cair 27
Gambar 3.2 Diagram Alir Penelitian 28
Gambar 3.3 Rangkaian LDR 29
Gambar 3.4 Diagram Alir Program Pada Mikrokontroler 30
Gambar 3.5 Grafik Pengukuran 31
Gambar 4.1 Grafik Tegangan terhadap Jarak 35
Gambar 4.2 Grafik ADC terhadap Massa 37
Gambar 4.3 Alat Ukur Massa Jenis 44
Gambar 4.4 Tampilan pada Komputer 44
I. PENDAHULUAN
A. Latar Belakang
Minyak goreng merupakan zat yang penting untuk menjaga kesehatan tubuh manusia. Selain itu minyak juga merupakan sumber energi yang lebih efektif dibandingkan dengan karbohidrat dan protein. Minyak, khususnya minyak nabati, mengandung asam-asam lemak esensial seperti asam linolenat, lenolenat dan arakidonat yang dapat mencegah penyempitan pembuluh darah akibat penumpukan kolesterol. Minyak juga berfungsi sebagai sumber dan pelarut bagi vitamin-vitamin A, D, E dan K (Ketaren, 2008).
minyak goreng itu sendiri. Perubahan sifat fisika dan kimia dari minyak goreng akibat lamanya penggunaan ini tentu saja berpengaruh terhadap nilai gizi yang terkandung di dalam minyak goreng itu sendiri, dan secara langsung maupun tidak langsung mempengaruhi sistem kesehatan tubuh kita yang mengkonsumsi minyak goreng tersebut.
Parameter kualitas minyak meliputi sifat fisik dan kimia. Sifat fisik minyak meliputi warna, bau, kelarutan, titik cair, titik didih, titik pelunakan, slipping point, shot melting point, bobot jenis, viskositas, indeks bias, titik kekeruhan, titik asap. Titik nyala dan titik api.
B. Rumusan Masalah
Dalam penelitian ini telah dirumuskan masalah yaitu :
Bagaimana cara merancang mekanik alat ukur massa jenis minyak kelapa sawit?
C. Batasan Masalah
Batasan masalah dalam penelitian ini adalah:
1. Sensor yang digunakan adalah LDR dan transmitter cahayanya adalah LED serta angka pembacaannya dengan 2 angka di belakang koma dalam satuan kg/m3.
2. Minyak goreng yang digunakan sebagai sampel adalah berbagai jenis minyak kelapa sawit.
3. Volume yang digunakan konstan yaitu 800 ml atau 0,8 liter. 4. Pengukuran minyak dilakukan pada suhu ruang.
5. Perangkat lunak yang dipakai dalam pemrograman mikrokontroler adalah bahasa Bascom AVR.
D. Tujuan Penelitian
Tujuan dilakukannya penelitian ini adalah:
1. Merancang alat ukur massa jenis dengan menggunakan sensor optik berupa LDR dan mikrokontroler ATMega 8535.
2. Mengaplikasikan sensor optik ke dalam mikrokontroler ATMega 8535.
E. Manfaat Penelitian
Adapun manfaat dilakukannya penelitian ini adalah:
1. Adanya alat yang dapat mengukur massa jenis minyak kelapa sawit.
II. TINJAUAN PUSTAKA
A.Minyak Goreng
Minyak goreng berfungsi sebagai medium penghantar panas, penambah rasa gurih, dan penambah nilai kalori (Winarno, 2004). Minyak goreng didefinisikan sebagai minyak yang diperoleh dengan cara memurnikan minyak makan nabati. Minyak nabati merupakan minyak yang diperoleh dari serealia (jagung, gandum, beras, dan lain), kacang-kacangan (kacang kedelai, kacang tanah, dan lain-lain), palma-palmaan (kelapa dan kelapa sawit), dan biji-bijian (biji bunga matahari, biji wijen, biji tengkawang, biji kakao, dan lain-lain) (Nugraha, 2004).
membentuk lapisan keras bila dibiarkan mengering di udara, contohnya adalah minyak sawit.
Minyak Kelapa Sawit
Minyak kelapa sawit merupakan minyak diproduksi dari buah kelapa sawit. Produk minyak kelapa sawit sebagai bahan makanan mempunyai dua aspek kualitas. Aspek pertama berhubungan dengan kadar dan kualitas asam lemak, kelembaban dan kadar kotoran. Aspek kedua berhubungan dengan rasa, aroma dan kejernihan serta kemurnian produk (Depperin, 2007).
B.Cahaya
Cahaya merupakan gelombang elektromagnetik yang memiliki panjang gelombang 380 – 780 nm. Gelombang elektromagnetik berdasarkan panjang gelombangnya dibagi menjadi energi listrik, radio, gelombang mikro, inframerah, cahaya tampak, ultraviolet, sinar X, dan sinar gamma. Semakin tinggi frekuensi, panjang gelombangnya semakin pendek dengan energi yang semakin besar (Tipler, 1991).
C.Sensor
Menurut Alifis (2010), sensor adalah suatu peralatan yang berfungsi untuk mendeteksi gejala-gejala atau sinyal-sinyal yang berasal dari perubahan suatu energi seperti energi listrik, energi fisika, energi kimia, energi biologi, energi mekanik dan sebagainya. Contoh; Camera sebagai sensor penglihatan, telinga sebagai sensor pendengaran, kulit sebagai sensor peraba, LDR (Light Dependent Resistance) sebagai sensor cahaya, dan lainnya.
Sensor didefinisikan sebagai sebuah alat yang dapat menerima atau menanggapi sebuah sinyal atau rangsangan melalui sebuah sinyal elektrik. Sensor optic atau cahaya adalah sensor yang mendeteksi perubahan cahaya dari sumber cahaya, pantulan cahaya ataupun bias cahaya yang mengenai benda atau ruangan. Contoh; photocell, phototransistor, photodiode, photovoltaic, photomultiplier, pyrometer optic, dsb (Fraden, 2004).
D.LDR (Light Dependent Resistor)
Resistor peka cahaya atau fotoresistor adalah komponen elektronik yang resistansinya akan menurun jika ada penambahan intensitas cahaya yang mengenainya. Fotoresistor dapat merujuk pula pada light dependent resistor (LDR) atau fotokonduktor (Supatmi, 2010).
Resistor peka cahaya (Light Dependent Resistor/ LDR) memanfaatkan bahan
dalam spektrum tampak, dengan puncaknya sekitar 0,6 µm untuk CdS dan 0,75
µm untuk CdSe. Sebuah LDR CdS yang tipikal memiliki resistansi sekitar 1 MΩ
dalam kondisi gelap gulita dan kurang dari 1 KΩ ketika ditempatkan dibawah
sumber cahaya terang.
a. Simbol Foto-resistor / LDR
Simbol rangkaian yang digunakan untuk Foto-resistor atau LDR adalah penggabungan resistor dan penunjukkan bahwa resistor tersebut sensitif terhadap cahaya. Gambar 2.1 merupakan simbol dari LDR. Simbol dasar Foto-resistor / LDR memiliki persegi panjang yang digunakan untuk menunjukkan fungsi resistansinya, dan kemudian memiliki dua panah masuk, sama seperti yang digunakan untuk foto-dioda dan foto-transistor, untuk menunjukkan sensitivitasnya terhadap cahaya. Sebagian menggunakan lingkaran pada resistor-nya, sebagian lagi tidak. Simbol Foto-resistor atau LDR yang lebih umum digunakan adalah resistor tanpa lingkaran di sekitarnya (Anonim A, 2009) .
(a) (b)
b. Karakteristik LDR
Adapun karakteristik dari LDR ialah : - Laju Recovery
Bila sebuah LDR dibawa dari suatu ruangan dengan level kekuatan cahaya tertentu ke dalam suatu ruangan yang gelap, maka bisa kita amati bahwa nilai resistansi dari LDR tidak akan segera berubah resistansinya pada keadaan ruangan gelap tersebut. Namun LDR tersebut hanya akan bisa mencapai harga di kegelapan setelah mengalami selang waktu tertentu. Laju recovery merupakan suatu ukuran praktis dan suatu kenaikan nilai resistansi dalam waktu tertentu. Harga ini ditulis dalam K/detik, untuk LDR tipe arus harganya lebih besar dari 200K/detik (selama 20 menit pertama mulai dari level cahaya 100 lux), kecepatan tersebut akan lebih tinggi pada arah sebaliknya, yaitu pindah dari tempat gelap ke tempat terang yang memerlukan waktu kurang dari 10 ms untuk mencapai resistansi yang sesuai dengan level cahaya 400 lux.
- Respon Spektral
c. Mekanisme Foto-resistor / LDR
Sebuah Foto-resistor atau LDR adalah komponen yang menggunakan foto-konduktor di antara dua pinnya. Saat permukaannya terpapar cahaya akan terjadi perubahan resistansi diantaranya.
Mekanisme di balik Foto-resistor atau LDR adalah foto-konduktivitas, yaitu suatu peristiwa perubahan nilai konduktansi bahan semikonduktor saat energi foton dari cahaya diserap olehnya. Ketika digunakan sebagai Foto-resistor atau LDR, bahan semikonduktor hanya digunakan sebagai elemen resistif dan tidak ada koneksi PN-nya. Dengan demikian, Foto-resistor atau LDR adalah murni komponen pasif.
d. Prinsip Kerja LDR
Prinsip Kerja LDR adalah ketika ada energi foton dari cahaya sebesar hf , yang melebihi energi gap semikonduktor, mengenai permukaan semikonduktor seperti yang terlihat pada Gambar 2.2 maka elektron yang berada di pita valensi mengalami transisi ke pita konduksi serta merta meninggalkan hole di pita valensi. Akibat transisi elektron ke pita konduksi inilah mengakibatkan kenaikan konduktivitas bahan semikonduktor dan sebaliknya resistansinya menjadi berkurang. Jadi resistansi LDR ketika diruang gelap sangat besar dan sebaliknya apabila di ruang yang terang (permukaan sensor banyak menerima cahaya) resistansinya kecil (Dally, 1993).
Gambar 2.2 Saat cahaya LED mengenai LDR
e. Aplikasi Foto-resistor / LDR
Foto-resistor atau LDR berguna sebagai elemen sensitif cahaya berbiaya rendah dan digunakan selama bertahun-tahun dalam fotografi sebagai pengukur intensitas cahaya serta dalam aplikasi lain seperti detektor api/ asap/ pencuri, pembaca kartu, dan kendali lampu jalan berdasarkan cahaya.
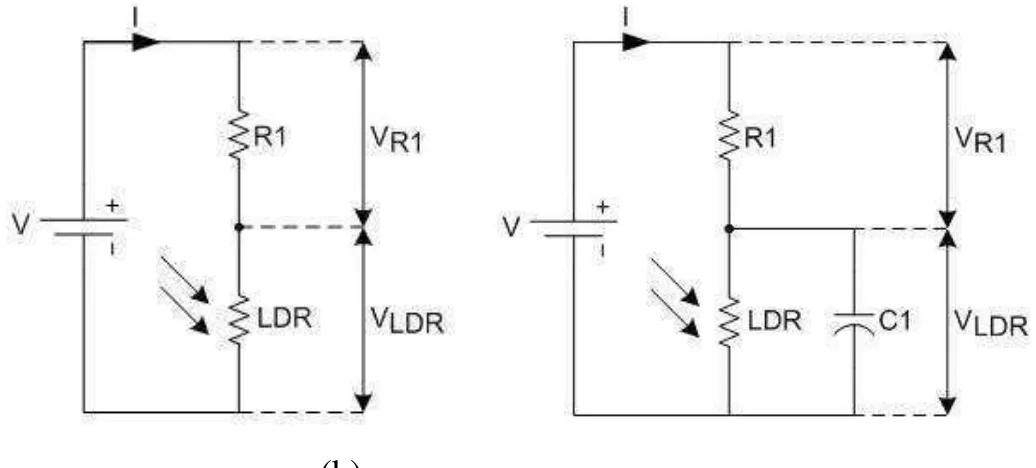
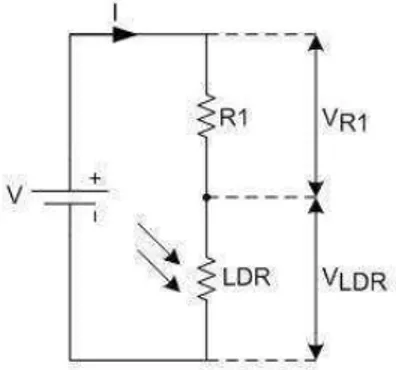
f. Rangkaian Elektronik Foto-resistor / LDR
Rangkaian elektronik yang dapat digunakan untuk Foto-resistor atau LDR adalah rangkaian yang dapat mengukur nilai resistansi dari Foto-resistor / LDR tersebut. Dari hukum ohm, diketahui bahwa:
� = �.� (2.1)
Dengan V adalah beda potensial antara dua titik, i adalah arus yang mengalir di antara-nya, dan R adalah resistansi di antara-nya. Lebih lanjut dikatakan pula bahwa nilai R tidak bergantung dari V ataupun i. Sehingga, jika ada perubahan
�= � / � (2.2)
Kedua persamaan tersebut dapat dimanfaatkan sebagai rangkaian yang dapat mendeteksi perubahan resistansi dari Foto-resistor atau LDR. Pada persamaan pertama, nilai V akan berubah jika resistansi berubah, sedangkan pada persamaan kedua, nilai i yang akan berubah. Namun, pada banyak mikrokontroler, telah terintegrasi rangkaian ADC yang dapat membaca tegangan (V) analog dengan baik. Sehingga pada pembahasan, rangkaian pembacaan nilai resistansi dari Fotoresistor atau LDR adalah yang berdasar pada persamaan pertama.
(b)
Gambar 2.3 a. Rangkaian LDR tanpa Kapasitor b. Rangkaian LDR dengan Kapasitor
Dengan rangkaian sederhana seperti di atas, intesitas cahaya dapat diukur dengan mengukur nilai tegangan VLDR (dalam Volt). Karena intensitas cahaya akan
mempengaruhi nilai resistansi LDR yang dengan demikian akan mempengaruhi pula nilai VLDR.
Selanjutnya tambahkan kapasitor pada LDR seperti pada Gambar 2.3b. Dengan penambahan kapasitor, nilai VLDR tidak akan berubah secara signifikan. Tetapi
nilai kapasitor yang tepat (0.1 uF – 1 uF), respon terhadap perubahan tetap baik, dan akan didapatkan tegangan VLDR yang stabil (Anonim B, 2011).
E.LED (light-emitting diode)
LED atau singkatan dari Light Emitting Diode adalah salah satu komponen elektronika yang terbuat dari bahan semi konduktor jenis dioda yang mempu mengeluarkan cahaya. Untuk mendapatkan emisi cahaya pada semikonduktor, doping yang pakai adalah galium, arsenic dan phosporus.
Gambar 2.4 LED dan Simbolnya
seperti lampu pijar dan neon, LED mempunyai kecenderungan polarisasi. Chip LED mempunyai kutub positif dan negatif (p-n) dan hanya akan menyala bila diberikan arus maju. Ini dikarenakan LED terbuat dari bahan semikonduktor yang hanya akan mengizinkan arus listrik mengalir ke satu arah dan tidak ke arah sebaliknya. Bila LED diberikan arus terbalik, hanya akan ada sedikit arus yang melewati chip LED. Ini menyebabkan chip LED tidak akan mengeluarkan emisi cahaya.
Sirkuit LED dapat didesain dengan cara menyusun LED dalam posisi seri maupun paralel. Bila disusun secara seri, maka yang perlu diperhatikan adalah jumlah tegangan yang diperlukan seluruh LED dalam rangkaian tadi. Namun bila LED diletakkan dalam keadaan paralel, maka yang perlu diperhatikan menjadi jumlah arus yang diperlukan seluruh LED dalam rangkaian ini.
Menyusun LED dalam rangkaian seri akan lebih sulit karena tiap LED mempunyai tegangan maju (Vf) yang berbeda. Perbedaan ini akan menyebabkan bila jumlah tegangan yang diberikan oleh sumber daya listrik tidak cukup untuk membangkitkan chip LED, maka beberapa LED akan tidak menyala. Sebaliknya, bila tegangan yang diberikan terlalu besar akan berakibat kerusakan pada LED yang mempunyai tegangan maju relatif rendah (Anonim C, 2011)
F.Mikrokontroler ATMega 8535
saling terhubung dan terorganisasi (teralamati) dengan baik oleh pabrik pembuatnya dan dikemas dalam satu chip yang siap dipakai (Winoto, 2010).
Mikrokontroler AVR (Alf and Vegard’s Risc processor) memiliki arsitektur 8 bit, dimana semua instruksi dikemas dalam kode 16 bit (16-bits word) dan sebagian
besar instruksi dieksekusi dalam 1 (satu) siklus clock. Mikrokontroler AVR berteknologi RISC (Reduced Instruction Set Computing). Secara umum, AVR dikelompokkan menjadi 4 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATMega dan keluarga AT86RFxx. Pada dasarnya yang membedakan masing-masing adalah kapasitas memori, peripheral dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan bisa dikatakan hampir sama (Wardhana, 2006). Gambar 2.5 merupakan bentuk fisik mikrokontrolerATMega 8535.
Gambar 2.5 Mikrokontroler ATMega 8535
Konfigurasi Pin ATMega8535
Gambar 2.6 Konfigurasi pin ATMega 8535.
Dari gambar tersebut dapat dijelaskan secara fungsional konfigurasi pin ATMega8535 sebagai berikut:
a. VCC berfungsi sebagai input sumber tegangan (+)
b. Port A (PA7 … PA0) berfungsi sebagai input analog dari ADC (Analog to Digital Converter). Port ini juga berfungsi sebagai port I/O dua arah, jika ADC tidak digunakan.
c. Port B (PB7 … PB0) berfungsi sebagai port I/O dua arah. Port PB5, PB6 dan PB7 juga berfungsi sebagai MOSI, MISO dan SCK yang dipergunakan pada proses downloading.
d. Port C (PC7 … PC0) berfungsi sebagai port I/O dua arah.
e. Port D (PD7 … PD0) berfungsi sebagai port I/O dua arah. Port PD0 dan PD1 juga berfungsi sebagai RXD dan TXD, digunakan untuk komunikasi serial.
g. XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit.
h. XTAL2 adalah output dari inverting oscillator amplifier.
i. AVcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
j. AREF adalah kaki masukan referensi bagi A/D Converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus diberikan ke kaki ini.
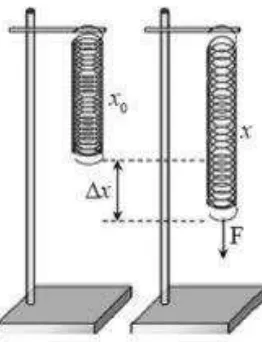
k. AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki analog ground yang terpisah (Wardhana, 2006). dengan benda elastis. Contoh benda elastis adalah karet ataupun pegas. Bila pegas ditarik melebihi batasan tertentu maka benda itu tidak akan elastis lagi (Giancolli, 2001).
Gambar 2.7 Sistem Pegas Hukum Hooke
Setiap pegas memiliki panjang alami, jika pegas tersebut tidak diberi gaya berat maka pada keadaan ini benda yang dikaitkan pada ujung pegas berada pada posisi setimbang. (lihat Gambar 2.7)
Secara matematis ditulis :
� = � (2.3)
� = � (Gaya Berat) (2.4)
�+ (− �) = 0 (2.5)
Persamaan (2.3) dan (2.4)
� = �= � (2.6)
Sehingga
= �
� (2.7)
Persamaan ini dikenal dengan persamaan pegas dan merupakan hukum hooke . Hukum ini dicetuskan oleh Robert Hooke (1935-1703. Tanda negatif menunjukkan bahwa gaya pemulih yaitu F mempunyai arah berlawanan dengan simpangan x. Ketika kita menarik pegas ke kanan maka x bernilai positif, tetapi arah F ke kiri (berlawanan arah dengan simpangan x).
Sebaliknya jika pegas ditekan, x berarah ke bawah (negatif) sedangkan gaya F bekerja ke atas. Jadi gaya F selalu berlawanan arah dengan simpangan x. k adalah konstanta pegas.
Gambar 2.8 a. Pegas normal b. Pegas ditekan
c. Pegas memberikan gaya reaksi
H.Hukum Ohm
Untuk menghasilkan arus listrik pada rangkaian, dibutuhkan beda potensial. Satu cara untuk menghasilkan beda potensial ialah dengan baterai. George Simon Ohm (1787-1854) menentukan dengan eksperimen bahwa arus pada kawat logam sebanding dengan beda potensial V yang diberikan keujung-ujungnya :
�∞� (2.8)
Sebagai contoh, jika dihubungkan kawat ke baterai 6 V, aliran arus akan dua kali lipat dibandingkan jika dihubungkan ke baterai 3 V.
Akan sangat membantu jika kita bandingkan arus listrik dengan aliran air sungai atau pipa yang dipengaruhi oleh gravitasi. Jika pipa (atau sungai) hampir rata, kecepatan alir akan kecil. Tetapi jika satu ujung lebih tinggi dari yang lainnya, kecepatan aliran atau arus akan lebih besar. Makin besar perbedaan ketinggian, makin besar arus. Potensial listrik analog, pada kasus gravitasi dengan ketinggian tebing dan hal itu berlaku pada kasus ini untuk ketinggian darimana fluida mengalir. Sama seperti penambahan ketinggian menyebabkan aliran air yang lebih besar, demikian pula beda potensial listrik yng besar atau tegangan menyebabkan aliran arus listrik menjadi lebih besar (Giancolli, 2001).
untuk suatu tegangan V Kita kemudian mendefinisikan hambatan sehingga arus
Fungsi utama hukum Ohm adalah digunakan untuk mengetahui hubungan tegangan dan kuat arus serta dapat digunakan untuk menentukan suatu hambatan beban listrik tanpa menggunakan Ohmmeter. Kesimpulan akhir hukum Ohm adalah semakin besar sumber tegangan maka semakin besar arus yang dihasilkan. Kemudian konsep yang sering salah pada siswa adalah hambatan listrik dipengaruhi oleh besar tegangan dan arus listrik. Konsep ini salah, besar kecilnya hambatan listrik tidak dipengaruhi oleh besar tegangan dan arus listrik tetapi dipengaruhi oleh panjang penampang, luas penampang dan jenis bahan (Anonim D, 2011).
I. Massa Jenis
Massa jenis adalah pengukuran massa setiap satuan volume benda. Semakin tinggi massa jenis suatu benda, maka semakin besar pula massa setiap volumenya. Massa jenis rata-rata setiap benda merupakan total massa dibagi dengan total volumenya. Sebuah benda yang memiliki massa jenis lebih tinggi (misalnya besi) akan memiliki volume yang lebih rendah daripada benda bermassa sama yang memiliki massa jenis lebih rendah (misalnya air). Secara matematika dapat dirumuskan :
=�.� (2.11) maka pada keadaan ini benda yang dikaitkan pada ujung pegas berada pada posisi setimbang. Besar gaya F ternyata berbanding terbalik dengan simpangan x dari pegas yang direntangkan atau ditekan dari posisi setimbang. (posisi setimbang ketika x=0). sehingga didapatkan persamaan 2.7 yaitu :
= ��
Untuk mencari x dapat memindahkan ruas, yang selanjutnya didapatkan
�= � (2.12)
Lalu substitusi persamaan 2.11 ke persamaan 2.12 , sehingga di dapatkan :
�= ��� (2.13)
Sehingga dapat disimpulkan bahwa massa jenis berbanding lurus dengan massa dan massa berbanding lurus dengan massa jenis. Adapun hubungan LED dan intensitas cahaya yang diserap oleh LDR ialah dapat dicari dengan
x = jarak (cm)
Dari kajian persamaan di atas dapat disimpulkan bahwa intensitas cahaya berbanding lurus dengan jarak yaitu semakin dekat jarak LED dengan LDR maka semakin besar nilai intensitasnya dengan konstanta pegas yang tetap, dan semakin besar massanya, semakin dekat jaraknya dan semakin besar intensitas cahaya yang diserap.
J. Pemrograman Visual Basic 6.0
Visual Basic merupakan sebuah software untuk membangun program atau aplikasi komputer yang dikembangkan dari bahasa Basic dimana di dalamnya sudah berisi statemen, fungsi dan keyword. Konsep dasar dari Visual Basic adalah
III. METODE PENELITIAN
A. Tempat dan Waktu Penelitian
Penelitian ini dilaksanakan pada bulan September 2012 sampai dengan Februari 2013. Bertempat di ruang workshop Fisika Instrumentasi Jurusan Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Lampung.
B. Alat dan Bahan
1. Alat
Peralatan yang digunakan dalam penelitian ini yaitu :
1. Multimeter : Alat ukur multi fungsi, dapat digunakan untuk ` mengukur arus (A), tegangan AC dan DC,
resistansi (Ω) dan mengecek komponen
elektronika.
2. Solder listrik : Alat pemanas timah yang berfungsi untuk menghubungkan kaki komponen dengan papan
PCB.
penunjang praktek elektronika seperti obeng, gergaji, palu, dll.
5. K-125 : Pemrograman mikrokontroler
6. Power Supply : Perangkat elektronika yang berfungsi sebagai tegangan DC yang berfungsi untuk
memberikan daya kepada suatu perangkat lain.
2. Bahan
Bahan- bahan yang digunakan dalam penelitian ini yaitu: a. Pembuatan catudaya
Catudaya merupakan perangkat elektronika yang berfungsi sebagai sumber tegangan DC yang berfungsi untuk memberikan daya kepada suatu perangkat lain. Adapun komponen- komponen yang digunakan pada pembuatan catudaya ini adalah 1 buah Header 40 x 1, 1 buah IC 7805, kabel pelangi, 4 buah kapasitor mylar, 1 buah LED 5 mm merah, 1 buah LED 3 mm hijau, 1 buah trafo 2A, 1 buah saklar, 1 keping papan PCB, 1 buah resistor 330 Ohm, Larutan FeCl3.
b. Sistem Minimum (sismin) Mikrokontroler ATMega 8535
mm, 1 buah socket 40 kaki, 2 kapasitor mylar, 1 bua saklar 2 kaki, kapasitor keramik, dan larutan FeCl3.
c. Rangkaian Sensor LDR
Dalam membuat rangkaian sensor LDR membutuhkan komponen diantaranya yaitu 1 buah resistor 10 Kohm, sensor LDR, dan kabel penghubung.
d. Rangkaian LED
Dalam membuat rangkaian LED membutuhkan komponen diantaranya yaitu 1 resistor 220 ohm, 1 buah LED, dan kabel penghubung.
e. Miniatur timbangan dilengkapi dengan pegas. f. Gelas Ukur ukuran 1,9 liter.
g. Berbagai Minyak kelapa sawit sebagai sampel
Minyak Gelas ukur
LED Pegas LDR
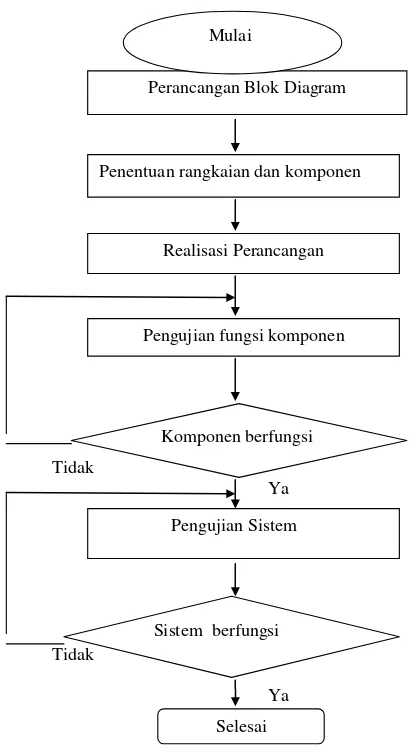
C. Diagram alir penelitian
Dalam menyelesaikan penelitian ini adapun langkah-langkah diperlihatkan pada Gambar 3.1
Tidak
Ya
Tidak
Ya
Gambar 3.2 Diagram Alir Penelitian Perancangan Blok Diagram
Penentuan rangkaian dan komponen
Realisasi Perancangan
Pengujian fungsi komponen
Komponen berfungsi
Pengujian Sistem
Sistem berfungsi
1. Perancangan Perangkat Keras
a. Sensor LDR
Light Dependent Resistor atau LDR adalah jenis resistor yang nilainya berubah seiring intensitas cahaya yang diterima oleh komponen tersebut. LDR biasanya digunakan sebagai detektor cahaya atau pengukur besaran konversi cahaya. Rangkaian LDR pada penelitian ini diperlihatkan pada Gambar 3.3
Gambar 3.3 Rangkaian LDR
Dalam penelitian ini, LDR digunakan sebagai pendeteksi massa yang mempengaruhi jarak LED dengan LDR. Fungsi LDR difokuskan pada pengaruh massa benda.
b. Sistem Pengukuran Massa Jenis
dekat. Hal ini berarti intensitas cahaya yang diterima oleh LDR dari LED semakin besar dan berakibat tegangan semakin besar dan tahanan LDR semakin kecil,
Adapun hasil massa yang telah didapat dibandingkan dengan volume yang telah ditentukan akan diproses pada Visual Basic 6.0.
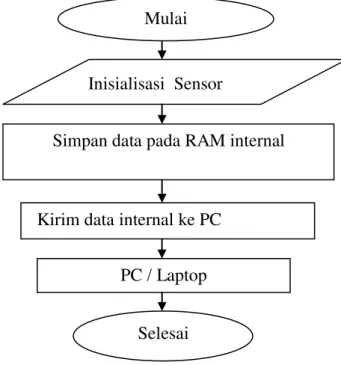
2. Perancangan Software pada Mikrokontroler
Perancangan software yang akan dilakukan pada penelitian ini meliputi perancangan perangkat lunak pada mikrokontroler ke PC. Pada Gambar 3.4 diperlihatkan diagram alir penelitian yang akan dilaksanakan.
Gambar 3.4 Diagram Alir Program pada Mikrokontroler Inisialisasi Sensor
Simpan data pada RAM internal
Kirim data internal ke PC
PC / Laptop Mulai
3. Pengkalibrasian Alat
Pengkalibrasian alat dilakukan dengan pengukuran massa yang berpengaruh pada tekanan pegas yang mengakibatkan terjadi perubahan jarak antara LED dengan LDR sehingga intensitas cahaya yang diserap oleh LDR semakin besar dan nilai resistansi LDR pun berkurang. Karena resistansi LDR berkurang akan mengakibatkan tegangan menjadi besar. Setelah dilakukan pengukuran tersebut, maka dibuat tabel dan Grafik seperti pada Tabel 3.1dan Gambar 3.5
Tabel 3. 1 Pengukuran Massa
Massa X (Jarak ) V (Tegangan)
Grafik Massa terhadap X (Jarak)
X(cm) V (Volt)
Massa (kg) X (cm)
(a) (b)
IV. HASIL PENELITIAN DAN PEMBAHASAN
A. Hasil Penelitian
Telah direalisasikan alat ukur massa jenis minyak kelapa sawit menggunakan sensor optik berbasis mikrokontroler ATMega 8535 dengan tampilan ke komputer. Pada penelitian ini menggunakan dua perangkat yaitu perangkat keras dan perangkat lunak. Pada perangkat keras terdiri dari rangkaian sensor, catudaya, rangkaian sistim minimum mikrokontroler, timbangan yang dilengkapi pegas, dan komputer. Sedangkan untuk perangkat lunak menggunakan bahasa Basic dengan program Bascom AVR
dan untuk komunikasinya menggunakan komunikasi serial dengan menggunakan bahasa Visual Basic 6.0.
Pada alat ini digunakan sensor optik berupa LDR sebagai receiver dan LED sebagai transmitter. LDR bertindak sebagai sensor pendeteksi massa berdasarkan intensitas cahaya dan LED sebagai variabel fisis input yang menghasilkan intensitas cahaya serta mikrokontroler ATMega 8535 sebagai komponen utama akuisisi data. Sedangkan volume dari minyak telah di tentukan yaitu 0,8 liter atau 0.0008 m3. Tegangan yang dihasilkan oleh
ADC yang terdapat pada mikrokontroler ATmega8535. Sinyal atau keluaran dari sensor yang diterima oleh mikrokontroler diolah dan ditampilkan ke komputer melalui jalur komunikasi serial USB menggunakan K-125. Ada beberapa proses yang telah ditempuh untuk mengetahui sebuah perubahan nilai fisis ataupun elektris sebelum sampai nilai akhir yaitu kesetaraaan antara massa benda dengan nilai analog yang menyatakan nilai massa benda.
Agar mikrokontroler dapat menerima dan mengirimkan sinyal keluaran dari sensor, dibutuhkan program untuk mengolah data tersebut. Program atau perangkat lunak yang digunakan untuk membaca inputan ADC dan mengatur proses pengiriman data ke komputer adalah Bascom AVR sebagai bahasa pemrograman pada mikrokontroler ATMega 8535. Sedangkan program atau perangkat lunak yang digunakan untuk menampilkan hasil konversi dari pembacaan ADC dalam nilai tegangan dan massa jenis pada komputer adalah bahasa pemrograman Visual Basic 6.0.
B. Pembahasan
1. Hardware
a. Rangkaian Sensor
juga pada intensitas cahaya yang diserap pada LDR sehingga terjadi perubahan nilai resistansi. Karena terjadi perubahan nilai resistansi mengakibatkan terjadinya perubahan tegangan. Tegangan keluaran dari LDR selanjutnya diubah oleh ADC yang telah terintegrasi dalam mikrokontroler ATMega 8535 menjadi sinyal digital yang akhirnya akan ditampilkan ke komputer. Selanjutnya dilakukan pengujian sensor untuk melihat kelinieran sensor dalam mengubah besaran fisis ke besaran elektrik. Hasil pengujian sensor dapat dilihat pada Tabel 4.1.
Tabel 4.1 Tabel Hasil Pengujian Sensor keluaran Tegangan terhadap Jarak
Massa(kg) Jarak (cm) Tegangan(V) Resistansi(ohm)
Gambar 4.1 Grafik Intensitas terhadap Jarak
Sifat dari LDR yaitu nilai resistansinya akan menurun seiring dengan semakin besarnya intensitas cahaya yang mengenainya. Pada saat jarak LED dan LDR sebesar 2,84 cm tegangan yang dihasilkan adalah 3,99 volt. Sedangkan pada jarak 0,00 cm, tegangan yang dihasilkan 4,51 volt. Dari Gambar 4.1 tampak bahwa respon LDR terhadap perubahan jarak. Semakin dekat jarak LED dan LDR semakin kecil nilai resistansinya dan semakin besar intensitas cahaya yang didapat oleh LDR, sehingga nilai tegangan yang dihasilkan semakin besar. Selanjutnya pengujian untuk LDR dilakukan dengan mengukur nilai ADC berdasarkan jarak LED dan LDR dapat dilihat pada Tabel 4.2.
Dari Tabel 4.1 dan Tabel 4.2, ketika massa ditambah maka jarak sensor LDR terhadap LED bertambah dekat, mengakibatkan tegangan yang dihasilkan sensor semakin besar sehingga nilai ADC nya semakin besar.
Gambar 4.2 Grafik ADC terhadap Massa
Dari Gambar 4.1 diperoleh persamaan hubungan massa terhadap ADC sebagai berikut :
y = 0.0262x - 21.173……….…….. 4.1 dimana y merupakan massa (kg) dan x (cm) merupakan nilai ADC . Kemudian persamaaan 4.1 selanjutnya digunakan untuk perhitungan massa jenis pada Visual Basic 6.0 yang selanjutnya akan ditampilkan pada komputer.
b. Sistem Minimum Mikrokontroler ATMega 8535
menggunakan resolusi 10 bit sehingga untuk menghitung output yang dihasilkan ADC mikrokontroler ATMega 8535 adalah:
� =���
� × 1023 (4.2)
Output ADC dalam bentuk desimal dengan nilai 0 – 1023, �� adalah tegangan ADC dari sensor yang akan dikonversi, �� adalah tegangan
referensi yang digunakan dalam ADC dan 1023 adalah nilai maksimum yang diberikan ADC 10 bit. Pada penelitian, �� yang digunakan sebesar
keluaran dari catudaya yaitu 5 volt.
Output dari ADC tersebut akan diproses mikrokontroler dengan menggunakan bascom AVR untuk dikirimkan ke komputer. Data yang diterima komputer dari mikrokontroler selanjutnya diolah komputer menggunakan program Visual Basic 6.0 untuk dikonversi lagi nilai massa jenis yang akan ditampilkan pada program VB 6.0.
Pada pembuatan alat ini digunakan port A sebagai masukan karena port A memiliki ADC. Port A yang digunakan adalah port A.1.
2. Software
- Analisis Program Mikrokontroler
Selanjutnya untuk menampilkan nilai massa jenis ke komputer digunakan alat berupa K-125 untuk komunikasi serial dan program Visual Basic 6.0 untuk menampilkannnya.
Program utama dalam pembuatan alat ini adalah mendeteksi adanya masukan dari sensor LDR yang terletak di pin A.1, dengan outputnya yaitu nilai ADC. Sebelum menuliskan program utama, mikrokontroler perlu dilakukan inisialisasi oleh bahasa Basic sehingga mikrokontroler dapat berjalan dengan baik. Inisialisasi mikrokontroler dituliskan dengan sintak: $regfile = "m8535.dat"
$crystal = 11059200
Sintak $regfile merupakan instruksi kompiler untuk menggunakan file register sesuai dengan yang dipilih. Karena pembuatan alat menggunakan mikrokontroler ATMega8535 maka kompiler yang digunakan adalah m8535.dat. Sedangkan sintak $crystal merupakan instruksi kompiler untuk mengatur frekuensi kristal yang digunakan. Dari sintak diatas dapat dilihat bahwa alat menggunakan kristal 11,0592 MHz.
Selain inisialisasi mikrokontroler yang akan digunakan, pada bahasa BASIC juga dilakukan inisialisasi pin-pin mikrokontroler yang digunakan sebagai input. Pada penelitian, port mikrokontroler ATMega8535 yang digunakan yaitu port A dimana port A sebagai masukan dari sensor. Penulisan pogram dalam bahasa Basic yaitu:
Inisialisasi selanjutnya yaitu inisialisasi ADC untuk menentukan proses clock, tegangan referensi dan mode ADC. Berikut adalah program untuk inisialisasi ADC:
Config ADC = Single , Prescaler = Auto , Reference = Avcc Start ADC
Dari listing program diketahui bahwa ADC yang digunakan menggunakan mode single dengan sistem clock sesuai yang digunakan mikrokontroler pada kristal. Tegangan referensi yang digunakan sesuai dengan masukan dari pin AVCC pada mikrokontroler ATMega 8535.
Untuk mengambil data dari ADC digunakan perintah: LDR=getadc(1)
Perintah getadc berarti mikrokontroler mengambil data adc dimana letak adc yang digunakan ditulis dalam angka yang diberi tanda kurung ( ). Angka 1 bermakna mikrokontroler mengambil data pada pin A.1. Dari perintah diatas keluaran dari LDR sebagai masukan di pin A.1.
Print Ldr Waitms 10000 Loop
End
Analisis Program Visual Basic 6.0
Perangkat lunak yang digunakan untuk menampilkan besaran-besaran yang diperoleh dari nilai massa jenis ini menggunakan Visual Basic 6.0. Visual Basic merupakan salah satu pemrograman visual yang memiliki bahasa pemrograman yang sederhana dan mudah untuk digunakan. Bahasa pemrograman yang digunakan adalah bahasa BASIC (Begginers All-Purpose Symbolic Instrucsion Code) yang merupakan bahasa pemrograman tingkat tinggi yang sederhana. Pada Visual Basic 6.0 untuk dapat berkomunikasi dengan perangkat lain di luar komputer, Visual Basic 6.0 menyediakan komponen MS Comm Control 6.0 sebagai media komunikasi.
Fungsi dari komponen ini adalah sebagai berikut : a. Mengadakan hubungan dengan serial port PC. b. Berhubungan dengan alat komunikasi lain. c. Melakukan pertukaran data.
d. Memonitor dan merespon event dan error yang terjadi pada hubungan serial.
Pengaturan ini dilakukan agar mikrokontroler dapat berkomunikasi dengan komputer. Pada pengaturan tersebut data 8 bit dikirim secara serial dengan kecepatan 9600bps.
MSComm1.PortOpen = True : untuk membuka Port Serial MSComm1.PortOpen = False : untuk menutup Port Serial
Pada awal program harus dilakukan pendeklarasian variabel-variabel apa saja yang digunakan dalam keseluruhan program. Pendeklarasian secara umum pada Visual Basic 6.0 adalah seperti berikut:
Dim buffer as long
massa. Setelah didapatkan nilai massa maka dilakukan perhitungan untuk massa jenis dengan membagi dengan volume yang telah dimasukkan nilainya pada text3 sehingga didapatkan nilai massa jenis.
Nilai tegangan selanjutnya akan ditampilkan menggunakan perintah text1.text= tegangan, nilai massa ditampilkan dengan perintah text2.text= massa dan massa jenis ditampilkan dengan perintah text4.text = massa jenis yang berarti pada text 1 berisi nilai tegangan, text 2 berisi nilai massa dan text 4 berisi nilai massa jenis.
Perbandingan Hasil Uji Alat Ukur Massa Jenis
Gambar 4.3 merupakan bentuk perangkat keras pada alat ukur massa jenis, dan Gambar 4.4 merupakan gambar tampilan pada komputer .
Gambar 4.4 Tampilan pada Komputer
Setelah alat pengukur massa jenis selesai dibuat, langkah selanjutnya adalah melakukan pengujian dan pengambilan data pengukuran terhadap sampel (berbagai jenis minyak kelapa sawit). Nilai perbandingan massa jenis hasil pengukuran alat dengan pengukuran menggunakan proses perhitungan dapat dilihat pada Tabel 4.3.
Tabel 4.3 Perbandingan Nilai Massa Jenis Menggunakan Perhitungan dengan Massa Jenis yang tertera di alat.
No Nama
dipakai 2 kali pemanasan
volume yang diperoleh dari pengukuran kemudian dihitung dengan menggunakan persamaan 2.10. Dari Tabel 4.3 terlihat nilai massa jenis alat dan hasil perhitungan timbangan. Pada kolom persentase kesalahan didapatkan dari perhitungan menggunakan persamaan 4.3. dengan 1 jam pemanasan. Agar dapat dilihat perubahan massa jenis antara belum dipakai, pemanasan pertama dan pemanasan kedua yang akan mempengaruhi kualitas minyak tersebut. Berikut ini merupakan tabel pengukuran massa jenis minyak kelapa sawit.
Tabel 4.4 Pengukuran Massa Jenis Minyak Kelapa Sawit
No Jenis Minyak
berkurang. Minyak kelapa sawit yang belum dipakai memiliki nilai yang paling besar karena minyak tersebut belum mengalami pemanasan sehingga molekul-molekulnya tidak mengalami perenggangan dan nilai kerapatannya lebih besar.
3. Analisis Alat Secara Keseluruhan
Secara keseluruhan alat ini merupakan alat ukur massa jenis zat cair berupa minyak kelapa sawit dengan menggunakan sensor optik dan mikrokontroler ATMega 8535 sebagai sistem akuisisi data serta menampilkan nilai massa jenis dengan tampilan Visual Basic 6.0. Blok diagram rangkaian keseluruhan dapat dilihat pada Gambar 4.5.
Gambar 4.5 Blok Diagram Rangkaian Keseluruhan
Sinyal Analog yang dihasilkan LDR adalah sebagai fungsi jarak pada pegas yang memiliki nilai k = 9,8 N/m. Sinyal analog dari LDR memiliki rentang 3,99 – 4,51 Volt, nilai keluaran yang cukup besar sehingga tidak perlu menggunakan pengkondisi sinyal. Sinyal keluaran dari LDR selanjutnya masuk ke dalam ADC internal yang berada pada mikrokontroler ATMega
LDR
MikrokontrolerATMega 8535
K-125
USB ke Komputer
8535 yang selanjutnya dikirim menggunakan K-125 ke komputer dan ditampilkan ke monitor dengan bantuan program Visual Basic 6.0.
Ketika zat cair diletakkan di gelas ukur pada alat mengakibatkan pegas tertekan ke bawah sehingga terjadi perubahan panjang pegas sebesar ∆�. Dari perubahan tersebut dapat dihitung konstanta pegas yang dipakai dengan persamaan 2.7. Dari perhitungan yang telah dilakukan didapatkan konstanta pegas sebesar 9,8 N/m.
Prinsip kerja alat ini yaitu ketika zat cair diletakkan diatas timbangan terjadi tekanan yang mengakibatkan perubahan jarak antara LED dengan LDR. Hal itu juga berpengaruh pada intensitas yang diserap oleh LDR pada LED. Semakin dekat jarak LED maka semakin besar intensitas yang diserap, sehingga terjadi perubahan resistansi yang dihasilkan berakibat pada perubahan nilai tegangan. Semakin dekat jarak LED dengan LDR maka semakin kecil nilai resistansi dan semakin besar nilai tegangan yang dihasilkan. Kemudian dari tegangan yang dihasilkan kemudian diproses pada mikrokontroler ATMega 8535 yang selanjutnya akan dikonversi digital oleh ADC. Selanjutnya, pada mikrokontoler dilakukan perhitungan dengan Persamaan 4.1. Kemudian keluaran dari mikrokontroler selanjutnya dikirim menggunakan K-125 ke komputer yang selanjutnya akan diproses oleh program visual basic 6.0 dan ditampilkan nilai massa jenisnya.
V. KESIMPULAN DAN SARAN
A. Kesimpulan
Dari penelitian yang telah dilakukan dapat disimpulkan:
1. Telah direalisasikan alat ukur massa jenis minyak kelapa sawit menggunakan sensor optik berupa LDR berbasis mikrokontroler ATMega 8535.
2. Sensor yang digunakan berupa LDR dan LED sebagai transmitter cahayanya.
3. Semakin besar massanya, semakin dekat jarak antara LED dengan LDR sehingga menyebabkan terjadinya perubahan resistansi yang menyebabkan terjadinya perubahan tegangan.
4. Semakin besar massanya, semakin dekat jarak antara LED dengan LDR menyebabkan perubahan nilai ADC yang semakin besar.
B. Saran
DAFTAR PUSTAKA
Alifis, 2010. http://alifis.wordpress.com/2010/10/29/sensor-optik/. Diakses pada tanggal 6 Mei 2012 pukul 15.45 WIB.
Anonim A. 2009. http: //backbonedyas. wordpress. com/2009/04/11/sensor-cahaya-ldr. Diakses pada tanggal 6 Mei 2012 pukul 16.05 WIB
Anonim B. 2011. http :// depokinstruments. com/2011/07/29/teori-dasar-ldr-dan-rangkaian-ldr - dalam-pengembangan/ diakses pada tanggal 6 Mei 2012.
Anonim C. 2011.http://nie-lampuled.blogspot.com.diakses pada tanggal 12 April 2013.
Anonim D. 2010.http://alljabbar.wordpress.com/2010/09/02/hukum-ohm/. Diakses pada tanggal 12 Mei 2012 pukul 09.03 WIB
Dally. 1993. Instrumentation For Enginering Measurements.John Wiley & Sons, Inc. Toronto
Depperin, 2007. Gambaran Sekilas Industri Minyak Kelapa Sawit. Jakarta. Fraden, J. 2004. Handbook of Modern Sensor Physics, Design and
Application. Springer-Verlag. New York.
Giancolli, D. C. 1998. Fisika Edisi ke lima, Jilid 2. Erlangga. Jakarta. Giancolli. D. C. 2001. Fisika Edisi ke lima, Jilid 1. Erlangga. Jakarta.
Iyant, eko.2012. http://kulonprogo.pun.bz/diode-cahaya-led.xhtml. Diakses pada tanggal 9 agustus 2012.
Ketaren, S., 2008. Minyak dan Lemak Pangan. Penerbit Universitas Indonesia, Jakarta.
Setyadi, D. 2005. Belajar Pemrograman Visual Basic 6.0. Andi. Yogyakarta. Supatmi, Sri. 2010. Pengaruh Sensor LDR terhadap Pengontrolan Lampu.
Majalah Ilmiah UNIKOM. Volume 8 No 2.
Sutiah, Firdausi K Sofjan, Budi Wahyu Setia. 2008. Studi Kualitas Minyak Goreng dengan Parameter Viskositas dan Indeks Bias. Jurnal Fisika Volume 11 No 2. FMIPA Universitas Diponegoro.
Tipler. 1991. Fisika Untuk Sains dan Teknik Jilid II. Erlangga. Jakarta.
Watik. 2010. Desain dan Analisis Alat Ukur Massa menggunakan Sensor Optik Berbasis Mikrokontroler AT89C51. Universitas Lampung. Lampung
Wardhana, Lingga. 2006. Belajar Sendiri Mikrokontroler AVR Seri ATMega8535 Simulasi, Hardware, dan Aplikasi. Yogyakarta: Andi Offset.
Winarno, F., G., 2004. Kimia Pangan dan Gizi. Penerbit PT Gramedia, Jakarta.
Winoto, Ardi. 2010. Mikrokontroler AVR Atmega8/32/16/8535 dan Pemrogramannya dengan Bahasa C pada WinAVR. Informatika. Bandung.