PEMETAAN BATIMETRI DAN PENERAPAN SUDUT
REFERENSI TERHADAP NILAI HAMBUR BALIK
MENGGUNAKAN
MULTIBEAM ECHOSOUNDER
DIANDRA YULIUS GITA PRAMUDITA
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
INSTITUT PERTANIAN BOGOR BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA*
Dengan ini saya menyatakan bahwa skripsi berjudul Pemetaan Batimetri dan Penerapan Sudut Referensi terhadap Nilai Hambur Balik Menggunakan Multibeam Echosounder adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, April 2015
ABSTRAK
DIANDRA YULIUS GITA PRAMUDITA. Pemetaan Batimetri dan Penerapan Sudut Referensi terhadap Nilai Hambur Balik Menggunakan Multibeam Echosounder. Dibimbing oleh HENRY MUNANDAR MANIK.
ABSTRACT
DIANDRA YULIUS GITA PRAMUDITA. Bathymetry Mapping and Implementation of Reference Angle to Backscatter Value Using Multibeam Echosounder. Supervised by HENRY MUNANDAR MANIK.
Multibeam echosounder system is an instrument that is used to determine morphology and characteristics of the seabed. The research objectives are to produce and describe map of bathymetry, backscatter value, beam density, standard deviation of depth, and standard deviation as a percentage of water depth, and also graph of ping interval. Data of multibeam echosounder processed by MB-System software and passed correction step of tide, amplitude values against grazing angle, sound velocity profile, and 3D editing of swath bathymetry. Nadir stripping and outlayer values in map of backscatter values are eliminated by implementation of 30o as reference angle to both sides of the beam, low pass filtering, and mosaic amplitude.The result showed depth value for slope area is 813.59 meters to 4904.71 meters, and 723.01 meters to 1065.21 meters for basin area. The correction stages also generated map of backscatter value without nadir stripping influence for slope area is 42.37 dB to 4.47 dB, and 41.59 dB to -16.63 dB for basin area. Acoustic signal characteristics such as beam spreading, noise levels, and inter-ping gaps showed by map of beam density, standard deviation of depth, and standard deviation as a percentage of water depth and graph of ping interval.
sebagai salah satu syarat untuk memperoleh gelar Sarjana Ilmu Kelautan
pada
Departemen Ilmu dan Teknologi Kelautan
PEMETAAN BATIMETRI DAN PENERAPAN SUDUT
REFERENSI TERHADAP NILAI HAMBUR BALIK
MENGGUNAKAN
MULTIBEAM ECHOSOUNDER
DIANDRA YULIUS GITA PRAMUDITA
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
INSTITUT PERTANIAN BOGOR BOGOR
ii
PRAKATA
Puji dan syukur penulis panjatkan kepada TUHAN YANG MAHA ESA atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Agustus 2014 ini adalah teknik deteksi bawah air, dengan judul Pemetaan Batimetri dan Penerapan Sudut Referensi terhadap Nilai Hambur Balik Menggunakan Multibeam Echosounder.
Terima kasih penulis ucapkan kepada Bapak Dr. Henry M. Manik, selaku pembimbing skripsi. Di samping itu, penghargaan penulis sampaikan kepada Bapak Dr. Udrekh dari Badan Pengkajian dan Penerapan Teknologi, yang telah memberikan data. Ungkapan terima kasih juga disampaikan kepada ayah, ibu, serta seluruh keluarga, atas segala doa dan kasih sayangnya.
Semoga karya ilmiah ini bermanfaat.
Bogor, April 2015
DAFTAR ISI
DAFTAR ISI ... iii
DAFTAR TABEL ... iv
DAFTAR GAMBAR ... iv
DAFTAR LAMPIRAN ...v
PENDAHULUAN ...1
Latar Belakang ...1
Tujuan Penelitian ...2
METODE ...2
Waktu dan Lokasi Penelitian ...2
Bahan ...3
Sumber: Kongsberg (2005) ...3
Alat ...4
Prosedur Analisis Data ...4
HASIL DAN PEMBAHASAN ...9
Kajian Batimetri ...10
Kajian Nilai Hambur Balik (Backscatter) ...13
Peta Sebaran Densitas Beam...21
Peta Standar Deviasi Kedalaman ...23
Grafik Hubungan Interval Ping Setiap Kedalaman ...25
SIMPULAN DAN SARAN ...27
Simpulan ...27
Saran ...27
DAFTAR PUSTAKA ...27
LAMPIRAN ...31
iv
DAFTAR TABEL
Tabel 1 Spesifikasi teknis MBES Kongsberg EM 120 ... 3
DAFTAR GAMBAR
Gambar 1 Peta lokasi penelitian ... 3Gambar 2 Diagram alir pengolahan data multibeam echosounder... 5
Gambar 3 Profil beam coverage sebelum koreksi SVP ... 6
Gambar 4 Profil beam coverage setelah koreksi SVP ... 6
Gambar 5 Profil dasar perairan daerah penelitian dalam jendela mbeditviz... 7
Gambar 6 Profil batimetri dalam jendela 3D Soundings ... 7
Gambar 7 Profil batimetri (a) dan standar deviasi sebagai persentase kedalaman perairan (b) daerah slope pada track line BGR06-207 ... 11
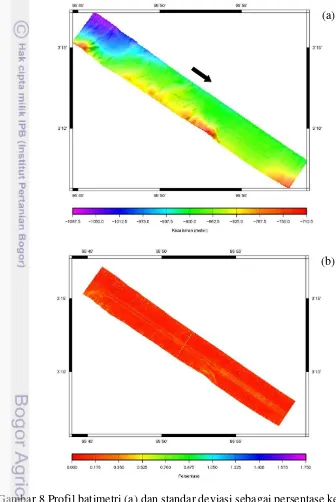
Gambar 8 Profil batimetri (a) dan standar deviasi sebagai persentase kedalaman perairan (b) daerah basin Simeulue pada track line BGR06-212 ... 12
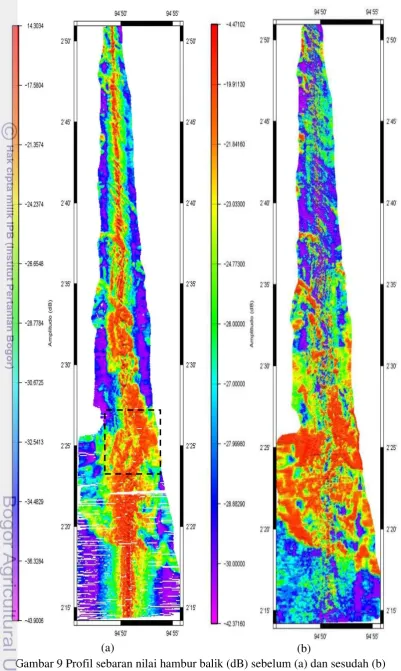
Gambar 9 Profil sebaran nilai hambur balik (dB) sebelum (a) dan sesudah (b) penerapan sudut referensi, low pass filter dan mosaik daerah slope pada track line BGR06-207 ... 15
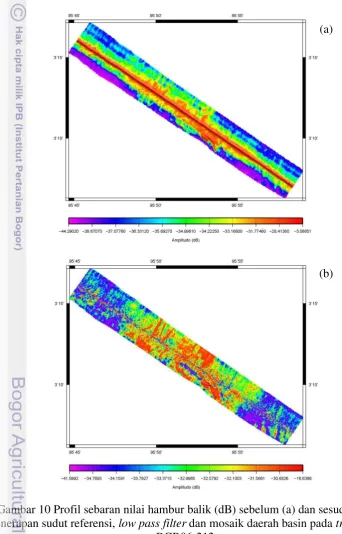
Gambar 10 Profil sebaran nilai hambur balik (dB) sebelum (a) dan sesudah (b) penerapan sudut referensi, low pass filter dan mosaik daerah basin pada track line BGR06-212 ... 16
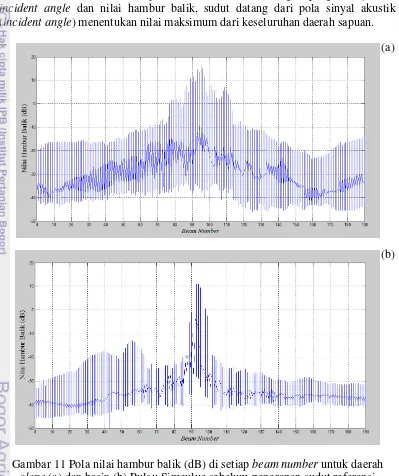
Gambar 11 Pola nilai hambur balik (dB) di setiap beam number untuk daerah slope (a) dan basin (b) Pulau Simeulue sebelum penerapan sudut referensi ... 17
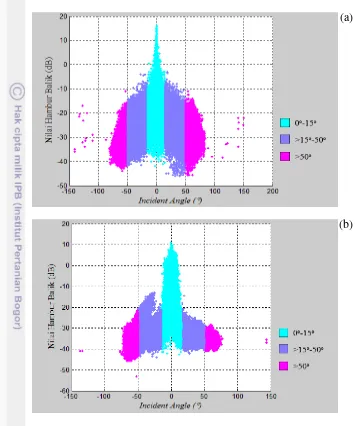
Gambar 12 Pola nilai hambur balik (dB) berdasarkan incident angle untuk daerah slope (a) dan basin (b) Pulau Simeulue sebelum penerapan sudut referensi ... 18
Gambar 13 Pola nilai hambur balik (dB) di setiap beam number untuk daerah slope (a) dan basin (b) Pulau Simeulue setelah penerapan sudut referensi ... 19
Gambar 14 Pola nilai hambur balik (dB) berdasarkan incident angle untuk daerah slope (a) dan basin (b) Pulau Simeulue setelah penerapan sudut referensi ... 20
Gambar 15 Grafik frekuensi distribusi nilai hambur balik daerah slope (a) dan basin (b) Pulau Simeulue... 21
Gambar 16 Peta sebaran densitas beam daerah slope (a) dan basin (b) ... 22
Gambar 17 Peta standar deviasi kedalaman daerah slope (a) dan basin (b) ... 24
DAFTAR LAMPIRAN
Lampiran 1 Informasi penomoran lintasan kapal survei SONNE pada daerah penelitian...31 Lampiran 2 Profil batimetri (a) dan sebaran nilai hambur balik (b) di
lintasan kapal survei SONNE ...32 Lampiran 3 Kurva model pembagian kelas sedimen berdasarakan nilai
hambur balik di setiap sudut datang pada frekuensi 30 kHz
PENDAHULUAN
Latar Belakang
Pemetaan adalah proses ilmiah untuk merekam dan mengorganisir hasil observasi kenampakan permukaan bumi sehingga setiap target dapat direpresentasikan dalam bentuk nilai serta disajikan dalam bentuk gambar atau grafis. Metode survei hidroakustik sebagai teknologi pemetaan dasar laut telah digunakan dan diakui secara luas dalam bidang industri dan penelitian yang membutuhkan analisis kuantitatif, dan secara cepat mampu menentukan morfologi dan struktur dari dasar laut (Scheirer et al. 2000, Goff et al. 2004, Collier dan Brown 2005). Batimetri adalah studi untuk menentukan morfologi dan struktur permukaan bumi di bawah air. Nilai hambur balik merupakan sebuah nilai dalam satuan desibel (dB) yang merepresentasikan hubungan sinyal akustik dengan karakteristik kekerasan dan kekasaran permukaan dasar laut. Batimetri dan nilai hambur balik dari multibeam echosounder saat ini umum digunakan untuk menghasilkan peta geologi permukaan dasar laut (Harris dan Baker 2011).
Sistem hidroakustik berkembang pesat dalam beberapa dekade terakhir dengan kemajuan pada kemampuan penentuan posisi geografis, pengolahan dalam komputer, dan desain hardware dan software pada sonar sehingga menghasilkan multibeam echosounder (MBES) system (Mayer 2006, Stanton 2012). Sistem MBES memancarkan gelombang akustik hingga ke dasar perairan dan menerima kembali pantulan gelombang tersebut dalam sebuah area berbentuk elips yang disebut sebagai daerah sapuan. Pengukuran batimetri daerah sapuan diperoleh dari kombinasi waktu dan sudut dari setiap beam yang ditransmisikan dan diterima. Nilai hambur balik dasar perairan didapat dari fungsi waktu untuk setiap beam saat mengenai dasar perairan dan menggambarkan perubahan seketika dalam suatu sebaran intensitas terkait perubahan kekasaran dasar laut skala mikro, perubahan karakteristik geologis permukaan dasar laut, dan atau volume sedimen yang tak tentu dalam daerah sapuan (Lurton 2002). Kuat nilai hambur balik juga ditentukan oleh sudut sehingga dalam sebaran nilai hambur balik terdapat daerah yang dicirikan sebagai ‘nadir stripping’. ‘Nadir stripping’ merupakan sinyal hambur balik di dalam daerah sudut datang vertikal dengan nilai yang lebih kuat (Parnum et al. 2004).
2
resolusi tinggi. Profil sebaran nilai hambur balik melalui proses lanjutan yaitu penerapan sudut referensi untuk meminimalisir pengaruh ‘nadir stripping’. Penerapan sudut referensi dilakukan untuk mengkompensasi nilai koefisien hambur balik rata-rata dalam setiap sudut dan mengembalikan nilai hambur balik ke tingkat yang sesungguhnya menggunakan nilai rata-rata hambur balik dalam sudut referensi tersebut (Siwabessy et al. 2006).
Kajian mengenai morfologi dan klasifikasi dasar perairan menggunakan nilai hambur balik telah banyak dilakukan oleh peneliti Indonesia seperti Pujiyati et al. (2010) dan Manik (2011). Pujiyati et al. (2010) meneliti hubungan antara ukuran butiran, kekasaran dan kekerasan dengan nilai hambur balik dasar laut di perairan Pulau Pari, Kepulauan Seribu menggunakan split beam Simrad EY 60 120 kHz scientific echosounder. Manik (2011) memproses sinyal hambur balik dari qantitative echosounder dan menerapkan model ring surface scattering (RSS) untuk mengkuantifikasi backscattering strength (SS) pada berbagai jenis substrat dasar laut terkait habitat ikan di perairan Selatan Jawa. Peneliti dari luar Indonesia seperti Parnum et al. (2005) meneliti nilai hambur balik berdasarkan sudut datang sinyal akustik menggunakan multibeam echosounder 455kHz.
Tujuan Penelitian
1. Menghasilkan dan mendeskripsikan peta batimetri dan peta sebaran hambur balik dasar perairan yang melalui koreksi pasang surut, nilai amplitudo terhadap grazing angle, sound velocity profile (SVP), dan 3D editing of swath bathymetry.
2. Menerapkan sudut referensi serta melakukan low pass filter dan mosaik amplitudo pada peta sebaran nilai hambur balik dasar perairan.
3. Menghasilkan peta statistik sebaran densitas beam, standar deviasi kedalaman perairan dan standar deviasi sebagai persentase kedalaman perairan serta grafik interval ping dari data yang dihasilkan oleh MBES.
METODE
Waktu dan Lokasi Penelitian
Penelitian ini dilaksanakan pada bulan Agustus 2014 hingga Desember 2014. Lokasi kajian penelitian ini berada di Perairan Sumatra, daerah Provinsi Aceh, Pulau Simeulue dan Pulau Nias. Data yang digunakan merupakan data sekunder dari Badan Pengkajian dan Penerapan Teknologi (BPPT) yang diperoleh dari kapal riset SONNE miliki RF Forschungsschiffahrt GmbH, Bremen, Jerman. Peta lintasan kapal dapat dilihat pada Gambar 1. Pengolahan data dilakukan di Laboratorium Komputasi Data Akustik Kelautan, Departemen Ilmu dan Teknologi Kelautan FPIK, Institut Pertanian Bogor, Jawa Barat.
yang digunakan dalam penelitian ini sehingga bisa dilihat pengaruhnya pada lebih dari satu jenis dasar perairan dengan kasus yang sama.
Gambar 1 Peta lokasi penelitian Bahan
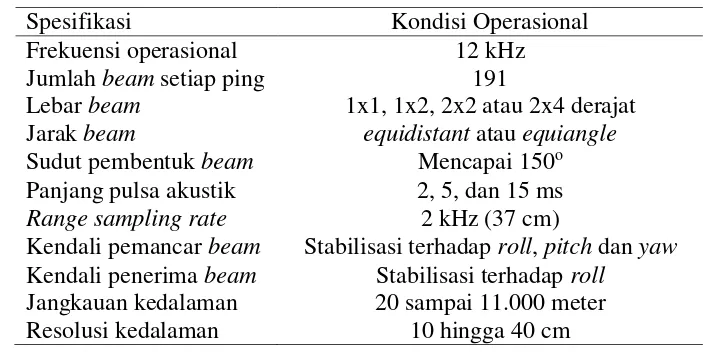
Bahan penelitian ini adalah data mentah dalam bentuk soft file yang diperoleh kapal riset Jerman SONNE. Instrumen hidroakustik yang digunakan adalah MBES Kongsberg EM 120 dengan frekuensi 12kHz (Tabel 1) pada bulan Agustus 2006. Data yang digunakan dalam penelitian berekstensi raw.all dan terdiri dari 18 track line yang saling terhubung.
Tabel 1 Spesifikasi teknis MBES Kongsberg EM 120
Spesifikasi Kondisi Operasional
Frekuensi operasional 12 kHz
Jumlah beam setiap ping 191
Lebar beam 1x1, 1x2, 2x2 atau 2x4 derajat
Jarak beam equidistant atau equiangle
Sudut pembentuk beam Mencapai 150o
Panjang pulsa akustik 2, 5, dan 15 ms Range sampling rate 2 kHz (37 cm)
Kendali pemancar beam Stabilisasi terhadap roll, pitch dan yaw Kendali penerima beam Stabilisasi terhadap roll
Jangkauan kedalaman 20 sampai 11.000 meter
Resolusi kedalaman 10 hingga 40 cm
4
Alat
Peralatan yang digunakan pada penelitian ini adalah laptop berbasis Windows dan Linux yang sudah terinstalasi perangkat lunak seperti Adobe Acrobat Pro, GSview 5.0, Golden Software Surfer 12, MATLAB, Microsoft Excel dan MB-System dalam Linux Poseidon yang dipergunakan untuk pengolahan data MBES.
Prosedur Analisis Data
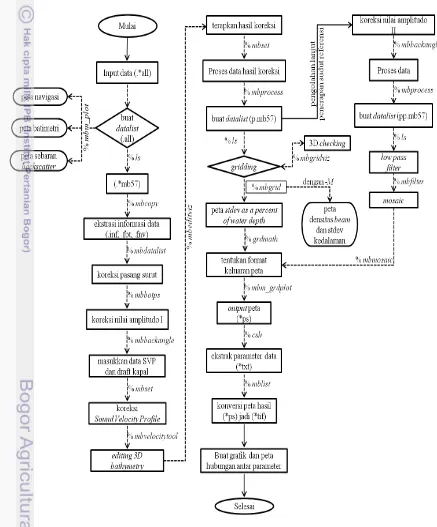
Penelitian ini menggunakan laptop berbasis Windows dan Linux yang telah terinstalasi perangkat lunak untuk pengolahan data MBES. Data raw.all diolah dalam MB-System pada laptop berbasis Linux untuk dikoreksi dan diproses sehingga menghasilkan profil batimetri dan amplitudo dasar perairan (Gambar 2). Amplitudo beam dalam MB-System adalah nilai hambur balik pada beam yang sama dan terbentuk untuk mendapatkan nilai batimetri (Schmidt et al. 2005). Satuan yang digunakan untuk data amplitudo adalah desibel (dB) dalam MB-System kecuali alat sidescan SeaBeam 2100. Langkah selanjutnya yaitu menyimpan seluruh data raw.all dalam satu berkas file. Bentuk datalist untuk keseluruhan data dalam satu berkas file menggunakan perintah ls. Datalist raw.all dapat diproses menjadi peta lintasan kapal saat pengambilan data, peta batimetri dan peta sebaran nilai hambur balik dasar perairan yang belum mengalami proses koreksi mengunakan perintah mbm_plot.
Tahap selanjutnya adalah konversi format data menggunakan mbcopy dari *.all menjadi *.mb57 sehingga sesuai dengan ID pengolahan data pada MB-System untuk data MBES EM120. Satukan file *.mb57 dalam sebuah datalist. Ekstrak file statistic (*.inf), fast bathymetry (*.fbt) dan fast navigation (*.fnv) dari datalist .*mb57 dengan perintah mbdatalist.
Koreksi nilai amplitudo terhadap grazing angle setiap beam dilakukan melalui perintah mbbackangle. Koreksi ini dilakukan dua kali untuk meminimalisir ‘nadir stripping’ dengan menerapkan dua sudut referensi pada data di dalam seluruh jumlah ping dan menggunakan nilai sonar altitude rata-rata. Sudut referensi yang digunakan adalah 30o dan -30o pada sisi beam yang berbeda dan dilakukan dalam dua kali proses data menggunakan mbprocess. Hasil koreksi ini yaitu file *.mb57.aga untuk setiap data dan datalist.mb-1_tot.aga.
6
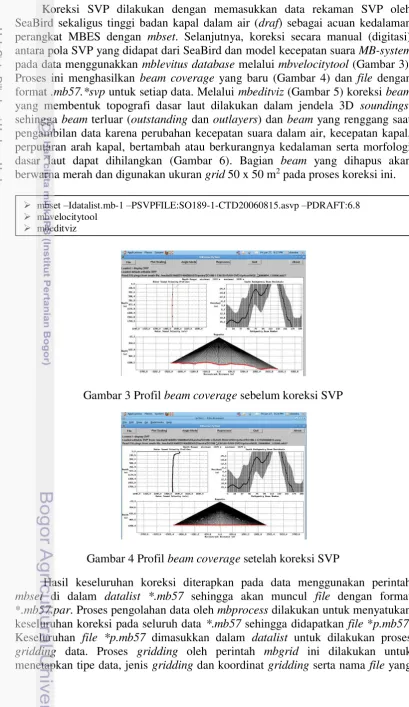
Koreksi SVP dilakukan dengan memasukkan data rekaman SVP oleh SeaBird sekaligus tinggi badan kapal dalam air (draf) sebagai acuan kedalaman perangkat MBES dengan mbset. Selanjutnya, koreksi secara manual (digitasi) antara pola SVP yang didapat dari SeaBird dan model kecepatan suara MB-system pada data menggunakkan mblevitus database melalui mbvelocitytool (Gambar 3). Proses ini menghasilkan beam coverage yang baru (Gambar 4) dan file dengan format .mb57.*svp untuk setiap data. Melalui mbeditviz (Gambar 5) koreksi beam yang membentuk topografi dasar laut dilakukan dalam jendela 3D soundings, sehingga beam terluar (outstanding dan outlayers) dan beam yang renggang saat pengambilan data karena perubahan kecepatan suara dalam air, kecepatan kapal, perputaran arah kapal, bertambah atau berkurangnya kedalaman serta morfologi dasar laut dapat dihilangkan (Gambar 6). Bagian beam yang dihapus akan berwarna merah dan digunakan ukuran grid 50 x 50 m2 pada proses koreksi ini.
Gambar 3 Profil beam coverage sebelum koreksi SVP
Gambar 4 Profil beam coverage setelah koreksi SVP
Hasil keseluruhan koreksi diterapkan pada data menggunakan perintah mbset di dalam datalist *.mb57 sehingga akan muncul file dengan format *.mb57.par. Proses pengolahan data oleh mbprocess dilakukan untuk menyatukan keseluruhan koreksi pada seluruh data *.mb57 sehingga didapatkan file *p.mb57. Keseluruhan file *p.mb57 dimasukkan dalam datalist untuk dilakukan proses gridding data. Proses gridding oleh perintah mbgrid ini dilakukan untuk menetapkan tipe data, jenis gridding dan koordinat gridding serta nama file yang
mbset –Idatalist.mb-1 –PSVPFILE:SO189-1-CTD20060815.asvp –PDRAFT:6.8
mbvelocitytool
dikeluarkan setelah proses gridding. Tipe data ditetapkan menjadi topografi dan amplitudo dengan jenis gridding (–F5) pada mbgrid yaitu weighted sonar footprint.
Gambar 5 Profil dasar perairan daerah penelitian dalam jendela mbeditviz
Gambar 6 Profil batimetri dalam jendela 3D Soundings
Jenis gridding tersebut mengkalkulasikan lebar beam berdasarkan sudut yang membentuk daerah sapuan dan pergerakan sonar di atas permukaan dasar laut. Selain itu, setiap titik pada daerah sapuan yang miring terhadap kemiringan permukaan akan mengalami proses filtering dan juga gridding yang menggunakan dua kali besar sel dari sel saat final grid sehingga dihasilkan resolusi yang lebih baik dari raw data. Variasi kedalaman yang besar tetap menghasilkan resolusi tinggi dengan menggunakan jenis gridding tersebut karena algoritmanya memiliki hasil yang sensitif baik di perairan dangkal atau di perairan dalam dengan memiliki sel-sel gridding lebih kecil dibandingkan lebar sapuan. Weighted sonar footprint disesuaikan dengan koreksi amplitudo terhadap grazing angle yang menggunakan faktor kemiringan permukaan dasar perairan di daerah tegak lurus kapal (acrosstrack slope) dan koreksi 3D editing of swath bathymetry sehingga lebih detail dan berpengaruh kuat terhadap hasil.
Pengolahan lanjutan setelah penerapan sudut referensi dalam nilai sebaran amplitudo yaitu proses low pass filter menggunakan perintah mbfilter dengan jenis
mbset –Idatalist.mb-1
mbprocess –F–1 –Idatalist.mb-1
ls | grep p.mb57 $ > datalist2.mb-1
8
filter Gaussian mean for low pass filtering sebelum disatukan melalui mbmosaic. Gaussian mean memperhatikan konten frekuensi dari data lebih baik dibandingkan metode lainnya. Perintah mbmosaic digunakan untuk melakukan gridding pada data amplitudo dasar perairan yang telah dua kali mengalami koreksi sudut referensi dengan mbbackangle. Jenis gridding yang digunakan adalah algoritma Gaussian weighted mean dan untuk mengisi gap yang terdapat pada data digunakan interpolasi spline. Gridding menggunakan algoritma Gaussian Weighted Mean menggunakkan ukuran grid dan nilai rata-rata data. Weighting function yang digunakan merupakan squared exponential (Geyer 2014)
� � = ��−�2�−2
dengan r adalah jarak dari titik tengah setiap sel grid menuju data di sekitarnya, a adalah jarak saat weighting function mendekati nilai 1/� di setiap nilai maksimum data dan A merupakan faktor normalisasi yang ditetapkan sehingga jumlah nilai dari fungsi tersebut 1. Menetapkan nilai prioritas pada mbmosaic dengan menggunakkan Gaussian weighted mean mosaicing akan membuat data yang tampak terlepas dari nilai-nilai pencilan (outlayers).
Hasil gridding kemudian dapat diperiksa kembali melalui tampilan 3D dengan menggunakan mbgridviz. Tampilan dan kegunaan mbgridviz pada dasarnya sama dengan mbeditviz, namun data yang dipakai adalah data yang telah melalui penyatuan semua koreksi pada mbprocess. Perintah mbgrid dengan tambahan kode (-M) digunakkan untuk menampilkan peta statistik berupa densitas beam dan standar deviasi kedalaman. Peta statistik standar deviasi sebagai persentase dari kedalaman perairan yang menunjukkan akurasi data berdasarkan kedalaman diperoleh melalui fungsi grdmath. Selanjutnya, pengaturan tampilan peta seperti colorbar, colormap, resolusi dan ukuran kertas diatur dalam mbm_grdplot. Memperoleh tampilan peta yang sesuai dengan kelas histogram yang dibuat oleh mbsystem menggunakan kode (-S) sehingga nilai-nilai outlayers diabaikan. Langkah selanjutnya adalah eksekusi file peta yang akan ditampilkan dengan perintah csh dan ekstraksi data parameter yang dipakai dari multibeam echosounder dari datalist dalam bentuk *.txt menggunakan perintah mblist untuk raw data dan data yang telah terkoreksi.
Gambar peta batimetri dan sebaran backscatter yang dihasilkan di dalam MB-System memiliki format *.ps dan dikonversi di dalam Windows menjadi bentuk *.tif. Data parameter yang terkoreksi dan belum terkoreksi dalam bentuk *.txt kemudian dibuat grafik yang menunjukkan hubungan antara parameter tersebut dalam proses pengambilan data oleh MBES.
HASIL DAN PEMBAHASAN
Gambar 1 memperlihatkan lintasan kapal riset SONNE yang bergerak dari sisi utara menuju barat daya Provinsi Aceh pada lintasan BGR06-207 di Samudera Hindia yang terdapat daerah slope, kemudian kapal bergerak menuju Pulau Simeulue dan menyisir daerah yang sejajar pantai sebelah barat dan selatan Pulau Simeulue. Pengambilan data dilanjutkan pada daerah Basin Simeulue yang terletak di antara Pulau Simeulue dan Pulau Sumatera pada Provinsi Aceh hingga menuju lintasan terakhir yang berada di utara Pulau Nias yaitu lintasan BGR06-219. Informasi nomor setiap lintasan disajikan pada Lampiran 1. Lintasan survei tersebut menempuh jarak 23889.37 kilometer. Total data yang dimiliki adalah 178225 ping dengan 98.54 % data beam yang terekam dengan baik dan 1.46 % tidak memiliki nilai (zero beam) untuk seluruh data batimetri dan amplitudo. Kedalaman minimum di sepanjang lintasan survei adalah 31.19 meter dan maksimum pada 5167.59 meter dengan nilai amplitudo terendah yaitu -55.5 dB dan tertinggi pada 21 dB yang diperoleh dari pengolahan data raw MBES. Informasi profil batimetri dan sebaran backscatter sepanjang lintasan survei yang belum terkoreksi disajikan pada Lampiran 2.
Global Positioning System (GPS) yang digunakan dalam penelitian ini adalah Trimble 4000 DS, dengan akurasi sebesar 5 meter jika dioperasikan bersama DGPS dan 20-50 meter dengan GPS pada umumnya. DGPS pada kapal riset SONNE menerima sinyal dari 7 stasiun referensi (Neben 2006). Roll offset kapal selama menempuh lintasan tersebut adalah positif 0.03o pada sisi kiri kapal, pengecekan dilakukan sebanyak satu kali di daerah dengan permukaan dasar laut yang rata pada kedalaman 5000 meter. Pengambilan data sound velocity profile (SVP) dilakukan satu kali pada posisi 94o50o48.12 Bujur Timur (BT) dan 2o22o5.88 Lintang Utara (LU) menggunakan SeaBird probe hingga kedalaman 2000 meter. Kecepatan kapal selama survei berkisar antara 5.4 sampai 10 knot, pengurangan kecepatan kapal kurang dari 10 knot dilakukan di beberapa tempat untuk akuisisi data seismik. Saat operasional berlangsung, beberapa parameter yang telah ditetapkan yaitu tidak ada koreksi pasang surut, cakupan beam menempuh jarak yang sama (equidistant), mode otomatis saat melakukan sounding dan pengaturan cakupan area pada kedua sisi kapal, serta pengukuran SVP melalui sensor yang terletak pada kapal (Ladage 2006).
mbgridviz
10
Kajian Batimetri
Daerah slope yang menjadi kajian berada pada lintasan BGR06-207 di koordinat 94o45o45.6 – 94o55o46.67 BT dan 2o14o11.57 – 2o50o57.74 LU. Panjang daerah kajian adalah 67.07 kilometer menuju selatan pada sudut 177o (ditunjukkan oleh tanda panah hitam). Total data dikaji yaitu 1822 ping dan 348002 beam poin dari 191 nomor beam. Jumlah beam yang terkoreksi baik untuk membentuk profil daerah slope pada Gambar 7 tersebut sebanyak 85.79%, 0.66% tergolong sebagai zero beams dan 13.55% tergolong sebagai flagged beams (yang terkoreksi buruk) untuk seluruh data batimetri dan amplitudo.
Kajian basin Pulau Simeulue berada di koordinat 95o44o40.53 – 95o59o0.56 BT dan 3o6o18.05 – 3o17o10.34 LU serta terletak di lintasan BGR06-212. Panjang daerah kajian adalah 29.49 kilometer menuju tenggara pada sudut 145o (ditunjukkan oleh tanda panah hitam). Total data dikaji yaitu 2196 ping dan 419436 beam poin dari 191 nomor beam. Jumlah beam yang terkoreksi baik untuk membentuk profil daerah basin Pulau Simeulue pada Gambar 8 tersebut sebanyak 99.72%, 0% tergolong sebagai zero beams dan 0.28% tergolong sebagai flagged beams (yang terkoreksi buruk) untuk seluruh data batimetri dan amplitudo.
Kedalaman minimum daerah slope tersebut 813.59 meter dan maksimum pada 4904.71 meter sedangkan daerah basin 723.01 meter hingga 1065.21 meter.
Berdasarkan ketentuan IHO (2008), daerah slope dan basin Pulau Simeulue termasuk dalam orde 2 dengan ketelitian horizontal sebesar 20 meter ditambah 10% dari kedalaman saat pengukuran. Jeda lajur pemeruman maksimum orde ini, yaitu empat kali kedalaman rata-rata. Nilai ketelitian daerah slope untuk kedalaman 813.59 meter yaitu 18.73 meter. Hal ini menunjukkan pengukuran batimetri pada kedalaman tersebut memiliki pertambahan ataupun pengurangan sebesar 18.73 meter. Kedalaman maksimum slope 4904.71 meter memiliki nilai ketelitian yaitu 112.81 meter. Daerah basin memiliki nilai ketelitian untuk kedalaman minimum 723.01 meter yaitu 16.65 meter sedangkan kedalaman 1065.21 meter memiliki nilai ketelitian yaitu 24.52 meter. Hasil perhitungan total vertical uncertainty (TVU) menunjukan nilai ketelitian yang semakin berkurang seiring bertambahnya kedalaman.
(b) (a)
12
Hal-hal yang memengaruhi munculnya noise pada MBES tersebut adalah kondisi laut, gangguan elektrik pada alat, dan noise dari kapal saat pengambilan data berlangsung (Schmidt et al 2005). Gangguan elektrik pada alat disebabkan oleh daya mesin kapal yang terlalu tinggi dan kabel listrik yang terpasang disebelah transduser (WASSP 2013). Hal tersebut akan mempengaruhi source level dari multibeam echosunder di setiap beam dipancarkan ke dasar perairan.
Gambar 8 Profil batimetri (a) dan standar deviasi sebagai persentase kedalaman perairan (b) daerah basin Simeulue pada track line BGR06-212
Nilai standar deviasi sebagai persentase kedalaman perairan daerah slope tinggi pada daerah dengan topografi yang curam sedangkan daerah basin memiliki nilai tersebut pada daerah dekat nadir dan sisi terluar beam. Salah satu kondisi laut
yang memengaruhi tingkat noise yaitu SVP. SVP merupakan profil yang menunjukkan hubungan cepat rambat gelombang akustik dengan jarak yang ditempuh dalam suatu medium tertentu (Urick 1983). Nilai SVP yang berbeda di setiap lokasi dan lapisan kedalaman perairan dan dengan hanya satu kali pengambilan profil tersebut maka tingkat noise pun akan semakin besar. Oleh karena itu, dalam MB-System profil SVP dari database mblevitus ditampilkan dan dijadikan acuan koreksi untuk membentuk profil SVP yang lebih sesuai dan mendekati dengan profil sesungguhnya pada setiap lokasi dengan asumsi kondisi perairan normal.
Hasilnya ditunjukkan dengan perubahan pada daerah sapuan beam (beam coverage) dan beam residuals pada setiap beam number yang dapat dilihat dalam Gambar 3 dan 4. Daerah beam coverage setelah koreksi mampu menjangkau dan menyapu dasar perairan dengan jarak antar beam yang semakin rapat. Namun, di beberapa lokasi koreksi ini tidak bekerja dengan baik, hal ini disebabkan profil SVP setelah koreksi masih belum sesuai dengan kondisi perairan saat pengambilan data. Beberapa gap pada dasar perairan terlihat dalam Gambar 7a seperti lubang sehingga tidak memiliki nilai kedalaman. Gap disebabkan oleh koreksi 3D editing of swath bathymetry pada setiap beam point dalam daerah sapuan MBES yang dianggap sebagai outlayers. Setiap beam point memiliki nilai kedalaman dan amplitudo serta memberi pengaruh pada keseluruhan data sehingga beam outlayers (berwarna merah pada Gambar 6) harus dihilangkan (Moustier 2005).
Kajian Nilai Hambur Balik (Backscatter)
Nilai hambur balik didapatkan dan diproses dari tiga zona dalam satu sapuan beam yaitu zona specular, zona oblique dan zona grazing. Zona specular (mirror-like) terletak pada daerah nadir (0o – 15o dalam pengolahan di MB-System) akan memiliki nilai hambur balik yang sangat kuat (high intensity). Zona oblique terdapat dalam rentang sudut 10o atau 20o hingga 50o atau 60o di luar zona specular dan memiliki nilai hambur balik yang cukup kuat (middle intensity) yang digunakan untuk mengukur kekasaran dan volume sedimen. Zona grazing terletak pada daerah paling luar (outer beams) yaitu lebih dari 60o dengan nilai hambur balik yang lemah (low intensity) dan digunakkan untuk mendapatkan nilai kekasaran dasar perairan secara mikro (Lurton 2013).
14
Nilai hambur balik dengan middle intensity pada sudut referensi tersebut mampu mengkompensasi nilai maksimum dan minimum pada seluruh kelas di zona specular dan zona grazing. Jika pola nilai rata-rata dari pengaruh sudut telah dihilangkan secara spesifik, maka nilai hambur balik harus dikoreksi menggunakan nilai referensi dari rata-rata intensitas hambur balik (Parnum et al. 2006) yang diukur pada sudut pasti zona oblique 30o (Gavrilov et al. 2005 dalam Parnum dan Gavrilov 2011) atau 40o (Kloser et al. 2010). Sudut referensi yang digunakan adalah 30o yang menjadi default dalam perintah mbbackangle di MB-System. Perintah mbbackangle ini menghitung acrosstrack slope dari batimetri dan jenis grid topografi dasar perairan daerah sapuan. Faktor untuk menghitung nilai hambur balik didasarkan pada grazing angle di setiap poin beam pada incident angle (sudut datang). Nilai grazing angle dikelaskan terhadap nilai hambur baliknya dan diinterpolasi berdasarkan waktu ping. Sudut referensi 30o digunakan pada beam di sisi port dan -30o pada sisi starboard (Beaudoin et al. 2003).
Saat pemrosesan data secara keseluruhan melalui mbprocess, nilai hambur balik dalam sudut referensi yang telah diterapkan melalui mbbackangle tersebut dijadikan acuan dalam pembentukan tabel kelas (histogram) nilai hambur balik yang baru. Hal ini dapat dilihat melalui perbedaan pada Gambar 12 dan 14 yang menunjukkan perubahan nilai maksimum dan minimum hambur balik berdasarkan sudut datang pada ketiga zona. Nilai outlayer hambur balik di daerah slope dan basin juga mengalami perubahan nilai maksimum dan minimumnya. Nilai outlayer ini disebabkan oleh noise yang terbentuk pada setiap parameter dalam pengukuran sinyal hambur balik. Sinyal hambur balik yang diterima oleh MBES systems dapat dipengaruhi oleh beberapa parameter, dikategorikan sebagai pengaturan sistem (daya pemancar, jumlah sinyal diterima, panjang pulsa), kondisi propagasi sinyal akustik (pelemahan dan penyebaran), geometris beam (jarak, sudut pembentukan, ukuran footprint), dan karakteristik dasar perairan (kekasaran dasar perairan, karakteristik sinyal akustik) (Parnum et al. 2005).
(a) (b)
Gambar 9 Profil sebaran nilai hambur balik (dB) sebelum (a) dan sesudah (b) penerapan sudut referensi, low pass filter dan mosaik daerah slope pada track line
16
Gambar 9b dan 10b merupakan dua profil sebaran nilai hambur balik yang terdapat pada daerah slope dan basin dengan koreksi pada nilai amplitudo terhadap grazing angle dilakukan dua kali dan menggunakan sudut referensi. Gambar 9b menunjukkan nilai amplitudo minimum -42.37 dB dan maksimum pada -4.47 dB. Gambar 10b menunjukkan nilai amplitudo minimum -41.59 dB dan maksimum pada -16.63 dB. Kedua profil menunjukkan luasan daerah nadir serta nilai hambur baliknya berhasil direduksi dan dikembalikan ke tingkat yang sesungguhnya.
Gambar 10 Profil sebaran nilai hambur balik (dB) sebelum (a) dan sesudah (b) penerapan sudut referensi, low pass filter dan mosaik daerah basin pada track line
BGR06-212
(a)
Gambar 11 dan 12 merepresentasikan Gambar 9a dan 10a dengan menunjukkan hubungan antara beam number dan incident angle pada sumbu x dan nilai hambur balik (backscatter) pada sumbu y. Beam number dari 0 – 94 menunjukkan port side (sisi kiri kapal) dan 96 – 190 menunjukkan starboard (sisi kanan kapal) dengan beam number 95 sebagai titik 0 sesungguhnya yaitu nadir. Nilai hambur balik di nadir 0o (incidence angle 0o atau 90o grazing angle), beam number 95 dan zona specular dengan beam number 80 – 100 pada daerah slope memiliki nilai hambur balik positif. Berdasarkan hubungan yang ditunjukkan incident angle dan nilai hambur balik, sudut datang dari pola sinyal akustik (incident angle) menentukan nilai maksimum dari keseluruhan daerah sapuan.
Gambar 11 Pola nilai hambur balik (dB) di setiap beam number untuk daerah slope (a) dan basin (b) Pulau Simeulue sebelum penerapan sudut referensi
18
didasar perairan dan sisi yang secara efektif mampu mengembalikan sinyal akustik yang datang (Lurton 2013).
Gambar 12 Pola nilai hambur balik (dB) berdasarkan incident angle untuk daerah slope (a) dan basin (b) Pulau Simeulue sebelum penerapan sudut referensi
Nilai hambur balik pada Gambar 13 dan 14 merepresentasikan hubungan nilai hambur balik dengan beam number dan incident angle setelah penerapan sudut referensi dan selanjutnya melewati tahap low pass filters dan mosaik amplitudo sehingga dapat dilihat dengan jelas sebarannya dalam Gambar 9b dan 10b. Gambar 13a menunjukkan nadir yang semakin sempit di antara beam number 90 – 100 pada daerah slope dengan hanya ada empat puncak nilai hambur balik yang memiliki nilai positif. Gambar 13b menunjukkan nilai hambur balik pada nadir telah berada di bawah nol untuk daerah basin. Hal ini menunjukkan penerapan sudut referensi sebesar 30o berhasil mengkompensasi nilai koefisien hambur balik sehingga kembali ke tingkat yang sesungguhnya. Namun dari hasil tersebut nilai maksimum dan juga minimum nadir masih lebih tinggi dan lebih rendah dibandingkan daerah lainnya. Hal ini dapat terjadi karena adanya fluktuasi
nilai hambur balik di zona tersebut yang cukup besar. Fluktuasi tersebut disebabkan oleh adanya perbedaan komposisi kekasaran dasar perairan pada zona specular. Selain itu, penggunaan fungsi nilai rata-rata untuk mengkompensasi nilai maksimum akan menyebabkan nilai minimum di setiap kurva akan lebih rendah dibandingkan dengan nilai dari zona lainnya yang mengalami peningkatan (Lurton 2013).
Gambar 13 Pola nilai hambur balik (dB) di setiap beam number untuk daerah slope (a) dan basin (b) Pulau Simeulue setelah penerapan sudut referensi
20
dibentuk dari beam point sehingga bisa digunakan untuk tujuan klasifikasi dasar perairan (Parnum dan Gavrilov 2011).
Daerah slope memiliki nilai hambur balik minimum -42.37 dB dan maksimum pada -4.47 dB. Nilai hambur balik daerah basin minimum -41.59 dB dan maksimum pada -16.63 dB. Menurut APL (1994), kurva model nilai hambur balik di setiap sudut datang (0o - 90o) sinyal akustik pada frekuensi alat 30 kHz membagi jenis sedimen dasar perairan kedalam 9 kelas. Gambar kurva model APL (1994) disajikan dalam Lampiran 3. Jenis-jenis sedimen tersebut yaitu lanau (dua jenis), pasir sangat halus, pasir cukup kasar, pasir kasar, pasir berkerikil, koral, bebatuan dan batuan besar. Gambar 15a menunjukkan bahwa daerah slope memiliki frekuensi distribusi nilai hambur balik tertinggi untuk kelas dengan rentang (-30.4) – (-24) dB. Namun, untuk daerah basin dalam Gambar 15b menunjukkan bahwa kelas nilai hambur balik dengan rentang (-36.9) – (-32) dB memiliki frekuensi distribusi tertinggi. Berdasarkan literatur APL (1994), daerah Gambar 14 Pola nilai hambur balik (dB) berdasarkan incident angle untuk daerah
slope didominasi jenis sedimen berupa lanau, pasir sangat halus, pasir cukup kasar serta pasir kasar, sedangkan untuk daerah basin didominasi jenis sedimen berupa lanau. Hal ini dilihat dari hubungan setiap nilai-nilai hambur balik yang terdapat dalam kelas dengan frekuensi tertinggi terhadap pengaruh sudut datang sinyal akustik. Setiap kurva model dalam APL (1994) memperlihatkan, semakin mendekati sudut datang 90o maka nilai hambur balik pun akan semakin rendah. Menurut Manik (2011), semakin besar diameter partikel maka semakin tinggi pula nilai hambur baliknya. Berdasarkan Manik (2011), rata-rata diameter partikel lanau adalah 50 –100 µm dan pasir adalah 500 µm.
Gambar 15 Grafik frekuensi distribusi nilai hambur balik daerah slope (a) dan basin (b) Pulau Simeulue
Peta Sebaran Densitas Beam
Peta sebaran densitas beam dalam Gambar 16 merepresentasikan setiap titik beam dari data dalam setiap bin (kelompok titik beam yang berbentuk satu garis untuk setiap ping). Densitas data tertinggi selalu berada tepat di bawah (b)
22
kapal. Hal ini terjadi pada perairan dangkal dan tempat terjadi perubahan arah kapal sehingga setiap ping saling tumpang tindih. Densitas data terendah selalu berada di perairan yang paling dalam ketika sudut-sudut beam bertambah besar (beam spreading) sehingga menyebarkan setiap titik beam sangat jauh.
Gambar 16 Peta sebaran densitas beam daerah slope (a) dan basin (b) (a)
Bagaimanapun, pengulangan lintasan kapal sehingga tumpang tindih tidak akan signifikan meningkatkan densitas data untuk setiap bin-nya (Schmidt 2005). Perubahan lebar sapuan pada daerah slope juga disebabkan oleh beam spreading yang tegak lurus sumbu kapal (acrosstrack) ketika kedalaman bertambah. Pengambilan data menggunakan sudut sebesar 65o sebagai sudut pancaran beam (beam angle) dari nadir dengan maksimum lebar sapuan sebesar 12 kilometer.
Daerah slope dan basin masing-masing memiliki nilai densitas data beam, yaitu 0 – 75 beam dan 0 – 12.5 beam. Nilai densitas daerah slope di kedalaman 800 – 1000 meter berkisar antara 15 – 35 dan kedalaman 3000 – 4900 meter nilai densitas mendekati 0. Nilai densitas beam daerah basin memiliki rentang yang lebih sempit dan lebih rendah di dekat daerah nadir (tepat dibawah kapal) dibandingkan dengan pada sisi kanan dan kiri kapal. Hal ini disebabkan titik-titik beam tersebut dihapus melalui proses koreksi 3D editing of swath bathymetry. Penumpukan titik beam yang renggang dan tak saling berasosiasi dengan titik beam di sekitarnya pada daerah tersebut sehingga memberi pengaruh pada nilai kedalaman dan hambur balik secara keseluruhan menjadi faktor agar titik tersebut dihapus.
Peta Standar Deviasi Kedalaman
Peta standar deviasi kedalaman menunjukkan variabilitas data kedalaman setelah mengalami seluruh tahapan koreksi pada prosedur analisis data. Variabilitas data kedalaman dipengaruhi oleh morfologi dasar perairan dan noise atau error yang terjadi pada parameter pengukuran kedalaman saat pengambilan data. Semakin curam kemiringan suatu dasar perairan maka energi akustik yang dipantulkan kembali akan menjauhi kapal dan menghasilkan estimasi kedalaman yang kurang baik (Schmidt 2005). Hal ini juga bisa mempengaruhi nilai hambur balik dasar perairan. Nilai hambur balik akan dikelompokkan berdasarkan grazing angle untuk setiap incident angle. Suatu sinyal datang dari sudut yang sama maka nilai hambur baliknya akan bervariasi berdasarkan morfologi dan karakteristik dasar laut yang menentukan besar grazing angle. Kesalahan dan profil kecepatan suara dalam air menjadi faktor lain yang memperbesar variabilitas data kedalaman suatu perairan. Profil kecepatan suara dalam air akan mempengaruhi pola pancaran beam seperti jarak tempuh dan luas area sapuan dari MBES didalam kolom perairan.
24
menunjukkan bahwa bentuk morfologi yaitu kemiringan lebih berpengaruh terhadapa variabilitas data kedalaman suatu dasar perairan.
Grafik Hubungan Interval Ping Setiap Kedalaman
Ping adalah sebuah bentuk transmisi pulsa akustik atau sebuah ledakan singkat pada frekuensi operasi sonar dari transduser (Echoview 2015). Dalam analisis nilai hambur balik, setiap pulsa yang kembali untuk setiap nomor ping dirata-ratakan untuk mendapatkan nilai kekasaran dan kekerasan dasar perairan serta fungsi kedalaman perairan. Setiap nilai yang didapatkan diambil untuk setiap posisi di bawah kapal selama survei yang kemudian membentuk sebuah garis dari setiap titik diskret disepanjang lintasan kapal. Jeda antara setiap titik-titik tersebut merupakan fungsi dari kedalaman, kecepatan kapal, dan nomor setiap ping yang digunakan untuk mengkalkulasikan parameter yang dibutuhkan (Penrose et al. 2005).
Gambar 18 Grafik hubungan interval ping setiap kedalaman untuk daerah slope (a) dan basin (b)
TVG bekerja di setiap ping yang ditransmisikan untuk menghindarai noise dan overload dalam setiap data. Nilai TVG harus diprediksi dan dirancang sebelum penerimaan pulsa dilakukan sehingga rata-rata tingkatan sinyal yang diterima MBES berada pada level optimum. Saat level optimum tercapai maka mampu memenuhi fungsi untuk variasi acak dari pantulan dasar perairan (Hammerstad 2000). Nilai-nilai navigasi, heading dan pergerakan kapal akan diinterpolasi dalam waktu untuk setiap waktu transmisi ping. Hal ini dilakukan
26
untuk menentukan posisi setiap data di dasar perairan sebagai referensi terhadap kapal (Dufek 2012).
Gambar 18 menunjukan hubungan antara interval ping untuk setiap kedalaman daerah slope dan basin. Hubungan tersebut berupa fungsi linear dimana waktu tempuh akan meningkat seiring bertambahnya kedalaman. Titik-titik ping yang berada di luar batas linearitas merupakan hasil dari mekanisme sonar yang kehilangan dasar perairan untuk beberapa saat (Schmidt 2005). Hal ini dapat dikarenakan adanya perubahan kedalaman yang besar dan perubahan posisi kapal yang disesuaikan juga dengan kecepatan kapal saat survey. Posisi kapal yang dapat membuat jarak (inter-ping gaps) dalam interval ping bertambah lebar adalah pitch and yaw (Galway 2000). Dalam penelitian ini, hasil survey di dalam cruise report tidak menjelaskan pengaturan TVG, dan melalui data tidak didapatkan nilai TVG untuk setiap nomor ping. Hal tersebut dapat berpengaruh pada nilai koefisien hambur balik secara keseluruhan pada daerah nadir dan oblique yang ditentukan berdasarkan setiap sebelumnya yang saling terkait dan diaplikasikan dalam bentuk real time. Koefisien nilai hambur balik disini yang kemudian berpengaruh terhadap nilai hambur balik di setiap zona hambur balik. Ketika nilai TVG untuk setiap ping tidak bisa direkonstruksi maka digunakan sudut referensi untuk mengembalikan nilai hambur balik ke tingkat yang sesungguhnya.
SIMPULAN DAN SARAN
Simpulan
Penelitian ini telah menghasilkan peta batimetri dan peta sebaran nilai hambur balik melalui proses koreksi pasang surut, nilai amplitudo terhadap grazing angle, sound velocity profile, dan 3D editing bathymetry, low pass filter dan mosaik amplitudo. Kedalaman daerah kajian pada daerah slope yaitu 813.59 meter hingga 4904.71 meter sedangkan daerah basin 723.01 meter hingga 1065.21 meter. Peta sebaran backscatter tanpa ada nadir stripping di daerah slope memiliki nilai amplitudo minimum -42.37 dB dan maksimum pada -4.47 dB, sedangkan daerah basin memiliki nilai amplitudo minimum -41.59 dB dan maksimum pada -16.63 dB setelah sudut referensi sebesar 30o untuk kedua sisi beam diterapkan. Karakteristik sinyal akustik seperti beam spreading, tingkat noise, dan inter-ping gaps ditunjukan melalui peta sebaran densitas beam, standar deviasi kedalaman, dan standar deviasi sebagai persentase kedalaman perairan dan grafik interval ping.
Saran
Perlu dilakukan penelitian lebih lanjut mengenai klasifikasi nilai hambur balik dasar laut dengan jenis sedimen secara khusus melalui data coring setelah pengaruh nadir stripping berhasil diminimasilir.
DAFTAR PUSTAKA
APL. 1994. APL-UW High Frequency Ocean Environmental Acoustic Models Handbook. Applied Physics Laboratory. Washington: University of Washington.
Beaudoin JD, Hughes Clarke JE, Bartlett JE. 2003. Retracing (and Re-raytracing)
Amundsen’s Journey through the Northwest Passage. Canada.
Collier JS, Brown CJ. 2005. Correlation of sidescan backscatter with grain size distribution of surficial seabed sediments. Marine Geology, 214: 431-449. Dartnell P, Gardner JV. 2004. Predicting seafloor facies from multibeam
bathymetry and backscatter data. Photogrammetric Engineering & Remote Sensing, 70(9): 1081-1091.
Dufek T. 2012. Backscatter analysis of multibeam sonar data in the area of the Valdivia fracture zone using geocoder in CARIS HIPS&SIPS and IVS3D Fledermaus. Hamburg: HafenCity Universtat.
Echoview. 2015. Glossary. Terhubung berkala:
28
Galway RS. 2000. Comparison of Target Detection Capabilities of the Reson Seabat 8101 and Reson Seabat 9001 Multibeam Sonars. Dept of Geodesy
and Geomatics Eng. Terhubung berkala:
http://www.omg.unb.ca/omg/papers/MBSS_TermPaper.pdf (3 Februari 2015)
Gayer CJ. 2014. Stat 8501 Lecture Notes: Spatial Gaussian Processes. Minnesota: The University of Minnesota.
Goff JA, Olson HC, Duncan CS. 2000. Correlation of side-scan backscatter intensity with grain-size distribution of shelf sediments, New Jersey margin. Geo-Marine Letters, 20: 43-49.
Hammerstad E. 2000. EM Technical Note: Backscattering and Seabed Image Reflectivity.Norwegia: Horten.
Harris PT, Baker EK. 2011. Seafloor Geomorphology as Benthic Habitat: GeoHab Atlas of Seafloor Geomorphic Features and benthic habitats. Elsevier Insights: 251-260.
Hellequin L, Boucher JM, Lurton X. 2003. Processing of high-frequency multibeam echo sounder data for seafloor characterization. IEEE Journal of Oceanic Engineering, 28: 78–89.
[IHO] International Hydrographic Organization. 2008. Standards for Hydrographic Surveys. Monaco: International Hydrographic Bureau.
Irish JD, Lynch JF, Traykovski PA, Newhall AE, Prada K. 1998. Aself-contained sector-scanning sonar for bottom roughness observations as part of sediment transport studies. Journal of Atmospheric and Oceanic Technology, 16: 1830-1841.
Kloser RJ, Penrose JD and Butler AJ. 2010. Multi-beam backscatter measurements used to infer seabed habitats. Continental Shelf Research 30: 1772–1782.
Kongsberg Maritime. 2005. Product Description: EM 120 Multibeam Echo Sounder. Norwegia: Horten.
Ladage S. 2006. Simrad EM120 multibeam bathymetry system. Research Cruise SO189 Leg 1 SUMATRA: The Hydrocarbon System of the Sumatra Forearc, 33-35. Hannover: Federal Institute for Geoscience and Natural Resources. Lurton X. 2002.An Introduction to Underwater Acoustics. Springer.
Manik HM. 2011. Underwater acoustic detection and signal proccessing near the seabed. Sonar Systems. Croatia: InTech.
Mayer LA. 2006. Frontiers in seafloor mapping and visualization. Mar. Geophys. Res., 27: 7-17.
Moustier De. 2005. Course Multybeam Sonar Method. Inggris: Publication Data. Neben S. 2006. Navigation and positioning. Research Cruise SO189 Leg 1
SUMATRA: The Hydrocarbon System of the Sumatra Forearc, 33-35. Hannover: Federal Institute for Geoscience and Natural Resources.
Parnum IM, Gavrilov AN. 2011. High-frequency multibeam echo-sounder measurements of seafloor backscatter in shallow water: Part 2 – mosaic production, analysis and classification. International Journal of the Society for Underwater Technology, 30(1): 13–26. Perth: Curtin University.
Parnum IM, Gavrilov AN, Siwabessy PJW, Duncan AJ. 2005. The effect of incident angle on statistical variation of backscatter measured using a high-frequency multibeam sonar. Proceeding of ACOUSTICS. Australia Barat: Busselton.
Parnum IM, Gavrilov AN, Siwabessy PJW, Duncan AJ. 2004. Identification of seafloor habitats in coastal shelf waters using a multibeam echosounder. Proceeding of Annual Conference of the Australian Acoustical Society, 181-186. Australia Barat: Gold Coast.
Penrose JD, PJW Siwabessy, A Gavrilov, I Parnum, LJ Hamilton, A Bickers, B Brooke, DA Ryan, P Kennedy. 2005. Acoustic techniques for seabed classification. Cooperative Research Center for Coastal Zone Estuary and Waterway Management: Technical Report 32. Australia Barat: Curtin University.
Pujiyati S, Hartati S, Priyono P. 2010. Efek ukuran butiran, kekasaran, dan kekerasan dasar perairan terhadap nilai hambur balik hasil deteksi hidroakustik. E-Jurnal Ilmu dan Teknologi Kelautan Tropis, 2:59-67. Urick RJ. 1983. Principles of Underwater Sound. USA: McGraw-Hill Inc.
Siwabessy PJW, AN Gavrilov, AJ Duncan, IM Parnum. 2006. Statistical analysis of high-frequency multibeam backscatter data in shallow water. Proceeding of ACOUSTICS. New Zealand: Christchurch.
30
Schmidt V, Chayes D, Caress D. 2005. The MB-System Cookbook. Columbia University.
Stanton TK. 2012. 30 years of advances in active bioacoustics: a personal perspective. Methods Oceanogr., 1-2: 49-77.
Talukdar KK, Tyce RC, Clay CS. 1995. Interpretation of sea beam backscatter data collected at the Laurentian fan off Nova Scotia using acoustic backscatter theory. Journal of the Acoustical Society of America 97: 1545– 1558.
WASSP Ltd. 2013. WASSP Multibeam Operator Manual WMB-3250. New Zealand: Auckland.
LAMPIRAN
32
Lampiran 2 Profil batimetri (a) dan sebaran nilai hambur balik (b) di lintasan kapal survei SONNE
34
RIWAYAT HIDUP
Penulis dilahirkan di Semarang pada tanggal 18 September 1992 dari ayah yang bernama Piter Hamonangan dan ibu Rara Triana Susilaningsih. Penulis merupakan anak pertama dari tiga bersaudara.
Lulus dari Sekolah Menengah Atas (SMA) Negeri 3 Bogor pada tahun 2010, penulis diterima sebagai mahasiswa Institut Pertanian Bogor, Fakultas Perikanan dan Ilmu Kelautan, Departemen Ilmu dan Teknologi Kelautan melalui jalur Seleksi Nasional Masuk Perguruan Tinggi Negeri (SNMPTN).
Selama kuliah di Institut Pertanian Bogor, penulis pernah menjadi asisten mata kuliah Teknologi Deteksi Bawah Air 2014-2015, Oseanografi Klimatologi Diploma 2014-2015 dan Osenografi Umum 2012-2013. Penulis aktif dalam Himpunan Mahasiswa Ilmu dan Teknologi Kelautan periode 2013-2014 sebagai anggota divisi keilmuan. Selain itu penulis juga aktif dalam kegiatan robotik, 7th Hongkong Underwater Robot Challenge tahun 2012 dalam divisi mekanika.
Dalam rangka penyelesaian studi di Fakultas Perikanan dan Ilmu Kelautan, penulis melaksanakan penelitian dengan judul “Pemetaan Batimetri dan Penerapan Sudut Referensi Terhadap Nilai Hambur Balik Daerah Slope dan Basin Pulau Simeulue, Aceh”.