Automatic Dependent Surveillance – Broadcast (ADS-B) dan
Prospek Pengaplikasiannya di TNI-AU
Arya Putra Kurniawan
1), Arwin Datumaya Wahyudi Sumari
2)1) Pangkalan TNI AU Husein Sastranegara, Bandung
Email : [email protected]
2) Departemen Elektronika, Akademi Angkatan Udara Jl. Laksda Adisutjipto, Yogyakarta 55002 – INDONESIA
Telp. 0274 486922 ext 6101 Fax 0274 488918
Email : [email protected]
ABSTRAK
Dalam makalah ini akan disampaikan mengenai Automatic Dependent Surveillance–Broadcast (ADS-B) sebagai alternatif dari Secondary Surveillance Radar (SSR) untuk kepentingan. ADS-B merupakan sebuah teknik pengintaian (surveillance) untuk menunjukkan lokasi pesawat dengan menggunakan navigasi satelit-satelit Global Positioning System (GPS) dan memungkinkan pesawat untuk mengirimkan lokasi akuratnya serta data penerbangan seperti ketinggian dan kecepatan, kepada pesawat terdekat dan Air Traffic Controller (ATC). TNI Angkatan Udara (TNI AU) sebagai penegak kedaulatan Negara Kesatuan Republik Indonesia (NKRI) di dirgantara dengan beragam alat utama sistem persenjataaan (alutsista) seperti pesawat tempur, angkut dan helikopter harus mempersiapkan diri menghadapi perkembangan standar teknologi penerbangan tersebut. ADS-B dapat diaplikasikan untuk meningkatkan zero accident, pemantauan posisi pesawat dan lain-lain.
Kata kunci : ADS-B, GPS, SSR, TNI-AU
1. PENDAHULUAN
Teknologi telekomunikasi berkembang sangat pesat dan melingkupi banyak bidang termasuk bidang
penerbangan. Teknologi Communication Navigation
Surveillance/Air Traffic Management (CNS/ATM) yang berbasis satelit telah disepakati dan menjadi standar internasional dalam pengelolaan ruang udara
di setiap negara dalam 10th Air Navigation Conference
yang diselenggarakan di Montreal pada tahun 1991 untuk mengantisipasi pertumbuhan penerbangan yang tinggi tanpa mengorbankan aspek keselamatan dan pengoperasiannya [1].
Automated Dependent Surveillance-Broadcast
(ADS-B) merupakan bagian dari teknologi CNS/ATM yang mampu menunjukkan lokasi pesawat
menggunakan navigasi satelit Global Positioning
System (GPS) dan memungkinkan pesawat untuk mengirimkan lokasi akurat pesawat dan data penerbangan (seperti ketinggian dan kecepatan) ke
pesawat terdekat dan Air Traffic Controller (ATC).
Tentara Nasional Indonesia Angkatan Udara (TNI AU) sebagai penegak kedaulatan Negara Kesatuan Republik Indonesia (NKRI) di dirgantara dengan alat utama sistem persenjataan (alutsista) pesawat, baik angkut maupun tempur harus
mempersiapkan diri menghadapi perkembangan standar teknologi penerbangan tersebut [2]. ADS-B
merupakan salah satu teknologi Next Generation Air
Transportaion System (NextGen ATS) di bidang penerbangan. ADS-B memiliki aplikasi untuk menghindari terjadinya kecelakaan di bandara dengan lalu lintas padat.
Mayoritas Pangkalan Angkatan Udara (Lanud) seperti Lanud Halim Perdanakusumah, Lanud Husein Sastranegara, Lanud Supadio dan Lanud Adi Sutjipto, memiliki landasan pacu yang digunakan bersama dengan bandara sipil, sehingga dalam beberapa tahun ke depan memungkinkan untuk memiliki lalu lintas yang sangat padat, mengingat pertumbuhan industri penerbangan yang pesat. Sehingga ADS-B menjadi
sebuah solusi dalam peningkatan pencapaian zero
accident .
Selain aplikasi untuk meningkatkan pencapaian
zero accident ADS-B dapat dimanfaatkan sebagai
informasi awal dalam operasi Search And Rescue
2. LANDASAN TEORI
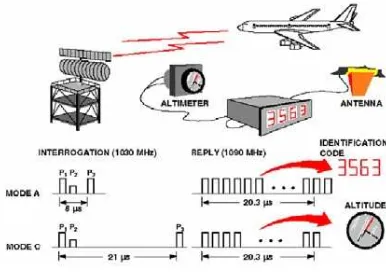
2.1. Secondary Surveillance Radar (SSR)
SSR merupakan sebuah sistem komunikasi dua
arah antara penginterogasi (interrogator) di darat dan
pemancar (transponder) yang terpasang pada pesawat
dan memancarkan sinyal balasan secara otomatis.
Keberadaan SSR dimulai dari sistem Identification
Friend or Foe (IFF) pada Perang Dunia ke-2. Sebuah sinyal ditransmisikan dari darat ke pesawat yang dicurigai, pesawat tersebut harus memberikan sinyal balasan yang sesuai agar tidak dianggap sebagai
musuh(foe).
SSR bekerja dengan prinsip yang sama, sinyal
interogasi ditransmisikan pada frekuensi uplink satu
arah 1030 MHz dan pesawat memberikan jawaban
pada frekuensi downlink satu arah 1090 MHz.
Jawaban diberikan ke plot extractor yang akan
melaksanakan decoding sehingga didapat identitas,
ketinggian, jarak dan arah pesawat yang kemudian dilewatkan ke ATC. Tidak seperti Radar primer yang mendeteksi jarak dan arah dengan memanfaatkan
pantulan sinyal radio yang ditransmisikan [3]. Mode
yang digunakan pada SSR :
1) Mode A merupakan mode SSR yang memberikan
jawaban berupa identitas sasaran (target).
2) Mode C merupakan mode SSR yang memberikan jawaban berupa ketinggian barometrik.
Gambar 1. Mode A/C SSR
2.1.1. Mode S SSR
Mode S SSR merupakan sebuah protokol paket data yang dapat meningkatkan perlengkapan
penentuan posisi dari Air Traffic Control Radar
Beacon System (ATCRBS) pemancar. Mode ini
didesain backward compatible sehingga dapat
digunakan dengan teknologi ATCRBS. Sinyal Mode S SSR terdiri dari :
1) Interogasi Mode S
Frekuensi uplink : 1030 MHz
Data Rate : 4 Mbps
Modulasi : Differential Phase Shift Keying
(DPSK)
2) Balasan Mode S
Frekuensi downlink : 1090 MHz
Data Rate : 1 Mbps
Modulasi : Binary Pulse Position Modulation
(BPPM)
Gambar 2. Interogasi Mode S
Gambar 3. Balasan Mode S
Dimulai dengan sebuah preamble yang terdiri
dari empat pulsa. Keempat pulsa pertama memiliki durasi 0.5 µs dan terletak pada 0 µs, 0.5 µs, 3.5 µs dan 4.5 µs setelah awal sinyal balasan. 8 µs setelah sinyal awal, sinyal balasan dimulai 56 atau 112 bit pesan biner. Dalam makalah ini dibahas 1090 MHz
Extended Squitter (112 bit pesan biner). Setiap bit memiliki durasi 1 µs yang terbagi menjadi dua periode 0.5 µs yang mengandung pulsa dan non-pulsa (ketiadaan pulsa).
Sebuah bit 1 diwakili oleh sebuah pulsa diikuti dengan non-pulsa dan sebuah bit 0 diwakili oleh sebuah non-pulsa diikuti dengan sebuah pulsa. Cara
coding tersebut disebut Manchester encoding dan dapat meningkatkan penerimaan pada situasi sulit
dengan Signal to Noise Ratio (SNR) rendah. Deteksi
sebuah bit dapat dilakukan dengan membandingkan
power pada awal dan akhir dari bit time slot.
Terdapat tiga link yang dapat digunakan sebagai
physical layer, yaitu 1090 MHz Mode S Extended Squitter (1090 MHz ES), Universal Access Transceiver (UAT) dan VHL Data Link (VDL) Mode
4. Dalam makalah ini digunakan link 1090 MHz ES.
terjadi interogasi. 1090 MHz ES termasuk 56 bit data field yang membawa informasi ADS-B yang didapat dari sistem navigasi avionik pada pesawat.
Gambar 4. Mode S Extended Squitter (112 bits)
Mode S Extended Squitter memiliki format yang
terdiri dari :
Preamble,mensinkronkan penerimaan.
Downlink Format (DF), menunjukkan tipe pesan.
11 = Acquisition Squitter
17 = ADS-B
18 = TIS – B
19 = Military
Capability (CA), menunjukkan subtipe pesan.
Aircraft Address (AA), menunjukkan alamat pesawat.
Message (ME), menunjukkan data ADS-B.
Parity Check (PE), menunjukkan kode deteksi
kesalahan.
Gambar 5 Bentuk Mode S Extended Squitter
2.1.2. Pemancar Mode S
Pemancar Mode S menyimpan data avionik di
Binary Data Store (BDS) Register (56 bits). Register BDS merupakan register yang dispesifikasikan oleh manual ICAO dari pelayanan spesifik Mode S dan
Mode S SARP. Register ini dapat di-downlink melalui
transaksi Ground Initiated Comm B (GIC-B). Setiap
register mengandung data payload dari balasan Mode
S atau extended squitter tertentu. Register yang dalam
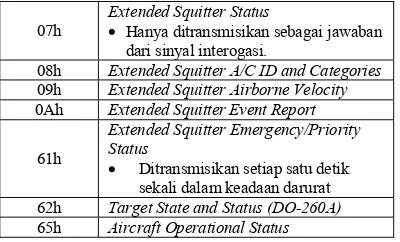
periode tertentu tidak diperbarui akan dihapus oleh pemancar. Register diidentifikasikan oleh dua dijit heksadesimal. Register yang digunakan oleh transmisi ADS-B 1090 MHz sebanyak 16 register.
Tabel 1. Tabel BDS Register
Register Keterangan 05h Extended Squitter Airborne Position
06h Extended Squitter Surface Position
07h Extended Squitter Status Hanya ditransmisikan sebagai jawaban dari sinyal interogasi.
08h Extended Squitter A/C ID and Categories
09h Extended Squitter Airborne Velocity
0Ah Extended Squitter Event Report
61h
Extended Squitter Emergency/Priority Status
Ditransmisikan setiap satu detik sekali dalam keadaan darurat 62h Target State and Status (DO-260A)
65h Aircraft Operational Status
Pemancar Mode S terdiri dari :
Encoder, merupakan bagian yang berfungsi
merubah data masukan menjadi encoded data
biner.
Binary Data Store (BDS), merupakan bagian yang berfungsi menyimpan bit informasi sebelum dimodulasi.
Modulator, merupakan bagian yang berfungsi memodulasi bit informasi dengan metode BPPM.
Gambar 6. Diagram Blok Pemancar Mode S
2.2. Automatic Dependent Surveillance Broadcast (ADS-B).
ADS-B merupakan sebuah sistem yang menggunakan 1090 MHz ES sebagai protokol penyampaian data. Ditelaah dari nama maka ADS-B juga berarti sebagai sebuah sistem yang menyiarkan pengintaian yang otomatis dan bergantung. Disebut
otomatis (automatic) karena tidak diperlukan
interogasi untuk memulai data atau squitter dari
transponder. Disebut bergantung (dependent) karena
dalam pengintaiannya data bergantung dari sistem navigasi dan kemampuan pesawat.
Penerima ADS-B merupakan bagian Mode S SSR yang berfungsi menerima dan menerjemahkan sinyal balasan Mode S SSR, sehingga terdiri dari :
Demodulator, bagian yang berfungsi
melaksanakan demodulasi sinyal balasan.
Decoder, bagian yang berfungsi melaksanakan
Gambar 7. Diagram Blok Penerima ADS-B
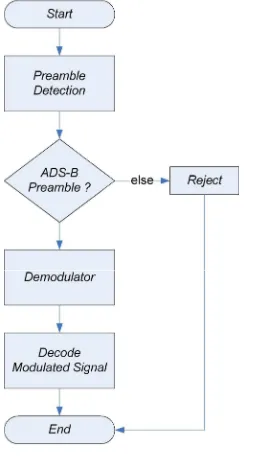
Penerimaan sinyal balasan Mode S dilaksanakan dalam beberapa tahap :
Pendeteksian preamble, preamble harus sesuai
dengan preamble ADS-B.
Demodulasi sinyal balasan Mode S, demodulasi dilakukan untuk mendapatkan nilai biner dari sinyal yang diterima atau pendeklarasian bit.
Decoding data, data biner yang diterima kemudian di-decode untuk mendapatkan informasi yang dibutuhkan.
ADS-B Decoder pertama kali akan membaca bit
1 sampai bit 5 untuk mengetahui Downlink Format
yang digunakan, jika sesuai dengan DF ADS-B
(DF=17) maka akan dilanjutkan ke proses decoding
selanjutnya, jika tidak sesuai dengan DF ADS-B maka
prosesdecoding dihentikan [4].
Gambar 8. Diagram Alir Penerima ADS-B
Setelah DF sinyal yang diterima sesuai dengan DF ADS-B maka akan dilanjutkan dengan membaca bit 6 sampai bit 8, pembacaan ini dilakukan untuk
menentukan Capabilities (CA). Setelah membaca CA
kemudian akan membaca bit 9 sampai bit 32, Aircraft
Address (AA) sesuai dengan yang telah ditentukan oleh ICAO. Kemudian membaca bit 33 sampai bit 37 untuk menentukan format yang digunakan.
Tabel 2. Tipe Format
Tipe Format Keterangan
1-4 Aircraft Identification and Category
5-8 Surface Position
9-18 Airborne Position
19 Airborne Velocity
Saat tipe format sesuai dengan identitas dan kategori pesawat maka akan dilanjutkan dengan
decoding identitas dan kategori pesawat. Decoder
kemudian akan membaca bit 38 sampai bit 40, kategori pesawat akan ditunjukkan sesuai dengan tabel kategori. Setelah pembacaan kategori selesai maka
dilanjutkan dengan proses decoding bit ke karakter,
dengan membaca tiap 5 bit. Pembacaan bit ke karakter dapat dilakukan dengan menggunakan Tabel 4.
Start
Read Bit 1 – Bit 5
DF 17 ?
Read Bit 6 – Bit 8
Declare CA
Read Bit 9 – Bit 32
Declare ICAO Address
Read Bit 33 – Bit 37
1 – 4 ? 5 – 8 ? 9 – 18 ? 19 ?
Decode
A/C ID & Cat Surface PositionDecode Airborne PositionDecode Airborne VelocityDecode
End
else
else else else else
Display
A/C ID & Cat Surface PositionDisplay Airborne PositionDisplay Airborne VelocityDisplay
Gambar 9. Diagram Alir Decoder
Tabel 3. Tabel Kategori Pesawat
2 Kategori C 3 Kategori B 4 Kategori A
Tabel 4. Tabel Character Coding
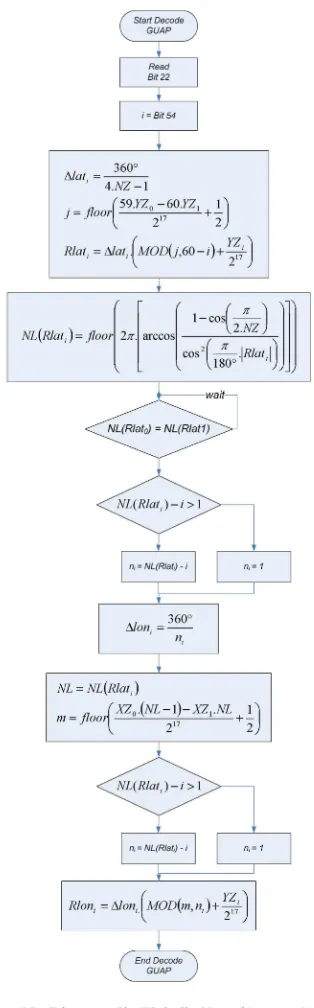
Saat tipe format sesuai dengan penentuan posisi
pesawat maka sebelum melaksanakan decoding posisi
di permukaan dan posisi di udara perlu ditentukan
Globally Unambiguous Airborne Position (GUAP) Decoding untuk mengetahui lats dan lons sebagai
referensi. Untuk mendapatkan nilai referensi
dibutuhkan kedua encoding even dan odd. Penentuan
tipe encoding dengan membaca bit 54, jika bit 54
bernilai 0 menggunakan even encoding dan jika
bernilai 1 menggunakan odd encoding.
Penentuan posisi menggunakan algoritma
Compact Position Report (CPR). YZ0 adalah bentuk
desimal dari bit 55 sampai bit 71 dengan even
encoding sedangkan YZ1 dengan odd encoding. XZ0 adalah bentuk desimal dari bit 72 sampai bit 88
dengan even encoding sedangkan XZ1 dengan odd
encoding.
Setelah lats dan lons diketahui dapat dilakukan
proses penentuan posisi di permukaan atau udara.
Proses decoding posisi di permukaan dapat
menggunakan even (i=0) atau odd (i=1) encoding.
Jumlah bit (Number of bits, Nb)yang digunakan untuk
meng-encode koordinat posisi adalah 19 (Nb=19).
Jumlah zona latitude geografis antara equator dan
kutub (NZ) adalah 15 (NZ=15). Penentuan encoding
(even atau odd) dilakukan pertama kali untuk
menentukan proses encoding selanjutnya.
Proses decoding posisi di udara juga dapat
menggunakan even (i=0) atau odd (i=1) encoding
dengan NZ=15 dan Nb=17. Sama seperti decoding
pada posisi di permukaan penentuan encoding (even
atau odd) dilakukan pertama kali untuk menentukan
proses decoding selanjutnya. Proses decoding posisi di
permukaan dan udara dengan menggunakan algoritma
Compact Position Reporting (CPR).
17
Decoding kecepatan di udara terdapat dalam beberapa subtipe yang ditunjukkan oleh bit 6 sampai bit 8. Subtipe 1 dan 2 digunakan saat pesawat yang mentransmisikan kecepatan di udara terhadap darat diketahui sedangkan sebaliknya untuk subtipe 3 dan 4. Subtipe 1 dan 3 digunakan saat pesawat dalam kecepatan normal atau subsonik (dibawah 1000 knot) sedangkan subtipe 2 dan 4 digunakan saat pesawat dalam kecepatan supersonik (di atas 1022 knot).
Tabel 5. Tabel Kecepatan Kode Kecepatan Tipe
1
Ground Speed Subsonic
2 Supersonic
3
Airspeed dan Heading Subsonic
4 Supersonic
Bit 14 memberikan informasi bit direction untuk
E-W yang bernilai 0 untuk arah Timur dan bernilai 1
untuk arah Barat. Sedangkan bit 25 memberikan
informasi bit direction N-S yang bernilai 0 untuk arah
Utara dan bernilai 1 untuk arah Selatan.
Bit 15 sampai bit 24 memberikan informasi kecepatan sesuai arah yang ditentukan oleh bit 14, sedangkan bit 26 sampai bit 35 memberikan informasi kecepatan sesuai arah yang ditentukan oleh bit 25. Untuk kecepatan subsonik nilai LSB = 1 knot sedangkan untuk kecepatan supersonik nilai LSB = 4 knot.
Tabel 6. Tabel Nilai Kecepatan
Nilai Desimal Kecepatan Subsonic Kecepatan
Supersonic
1 0 knot 0 knot 2 1 knot 4 knot 3 2 knot 8 knot 1022 1021 knot 4084 knot 1023 >1021.5 knot >4086 knot
3. PROSPEK PENGAPLIKASIAN ADS-B DI TNI AU
ADS-B merupakan memiliki beberapa aplikasi yang dapat dimanfaatkan oleh TNI-AU, antara lain :
Traffic Alert and Collision Avoidance System
(TCAS), yang berfungsi memberikan informasi lalu lintas dan menghindari terjadinya kecelakaan.
Airborne Collision Avoidance System (ACAS), yang berfungsi menghindari terjadinya kecelakan di udara.
Dengan memanfaatkan keakuratan posisi dapat
mempermudah Search and Resque (SAR) untuk
mencari lokasi pesawat jika terjadi kecelakaan sehingga meningkatkan harapan hidup korban kecelakaan.
Melalui protokol ini pesawat juga dapat mengirimkan data penerbangan, sehingga dapat
berfungsi sebagai monitoring system.
4. KESIMPULAN
Dari pembahasan sistem ADSB diatas dapat diambil kesimpulan bahwa :
1. TNI AU harus siap menghadapi teknologi penerbangan yang berkembang.
2. ADSB merupakan sebuah aplikasi dari Mode S SSR yang dapat digunakan oleh TNI AU untuk
meningkatkan zero accident.
3. ADSB dapat diaplikasikan untuk mengirimkan data penting pesawat lain.
4. Untuk pengiriman data penting pesawat diperlukan kriptografi.
5. DAFTAR REFERENSI
[1] 10th Air Navigation Conference, Montreal.
[2] Mabes TNI AU, “Doktrin TNI AU Swa Bhuwana Paksa”, 2007, Jakarta.
[3] European Organisation for the Safety of Air Navigation, 1090 MHz Extended Squitter. [4] International Civil Aviation Organitation (ICAO),
Aeronautical Telecommunications, Annex 10 Volume IV – Surveillance Radar and Collision Avoidance System, Third Edition 2002