STUDI PENGARUH KAPASI
( Aplik
Diajukan untuk meme pendidikan sar
DEPA
UNIV
TUGAS AKHIR
RUH PERUBAHAN TEGANGAN INPUT TERHA PASITAS ANGKAT MOTOR HOISTING
Aplikasi pada Workshop PT. INALUM )
memenuhi salah satu persyaratan dalam menyeles n sarjana (S)1) pada Departemen Teknik Elektro
O l e h
MAKRUF ABDUL HAMID NIM : 090422011
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
2014
ERHADAP
ii KATA PENGANTAR
Pujian dan syukur penulis panjatkan terhadap ALLAH SWT atas segala rahmat dan karunia yang menyertai penulis setiap saat selama perkuliahan, dalam pelaksanaan penelitian tugas akhir ini, dan saat penyusunan laporan tugas akhir.
Tugas akhir ini disusun untuk memenuhi persyaratan kurikulum sarjana strata 1 (S 1) di Departemen Teknik Elektro, Fakultas Teknik Universitas Sumatera Utara. Adapun judul tugas akhir ini adalah
“STUDI PENGARUH PERUBAHAN TEGANGAN INPUT KAPASITAS ANGKA MOTOR HOISTING
( Aplikasi pada Workshop PT. INALUM )
Penulis menyampaikan rasa hormat dan terima kasih yang sebesar – besarnya kepada kedua orang tua saya, yang telah membesarkan, mendidik dan terus membimbing serta mendoakan penulis. Juga rasa sayang kepada saudara – saudara saya Nurhidayati Magrifah Sitompul dan Fachri Rizki Sitompul yang selalu menyertai dan membantu penulis dari awal sampai akhirnya penulis mengerjakan tugas akhir ini.
Dalam kesempatan ini, penulis juga menyampaikan ucapan terima kasih yang sebesar – besarnya kepada :
1. Bapak Ir. Panusur SML Tobing, selaku Dosen Pembimbing Tugas Akhir, atas segala bimbingan, pengarahan dan motivasi dalam menyelesaikan Tugas Akhir ini.
2. Bapak Ir. Surya Tarmizi Kasim M.Si. selaku Dosen Wali penulis yang telah banyak membantu dan memberikan bimbingan semasa perkuliahan.
3. Bapak Ir. Surya Tarmizi Kasim M.Si. selaku Ketua Departemen Teknik Elektro FT – USU dan Bapak Rahmat Fauzi, MT selaku Sekretaris Departemen.
4. Seluruh Staf Pengajar dan karyawan di Departemen Teknik Elektro USU atas ilmu, bimbingan dan bantuannya hingga penulis selesai menyusun tugas akhir ini.
5. Rekan rekan mahasiswa Elektro Ekstensi ‘09 beserta semua pihak yang turut serta membantu dan kepada yang lainnya yang tidak dapat saya sebutkan satu persatu.
Penulis menyadari bahwa tugas akhir ini belum sempurna, baik dari segi materi maupun penyajiannya. Untuk itu saran dan kritik yang membangun sangat diharapkan dalam penyempurnaan tugas akhir ini.
Terakhir penulis berharap, semoga tugas akhir ini dapat memberikan hal yang bermanfaat dan menambah wawasan bagi pembaca.
Medan, Pebruari 2014 Penulis,
iv ABSTRAK
Motor induksi tiga fasa semakin banyak digunakan di perindustrian, hal ini dikarenakan Penggunaan dan perawatan motor induksi tiga fasa lebih sederhana, pemasangannya tidak sulit, dan biayanya lebih murah dari pada motor sinkron. Untuk mendapatkan efisiensi yang tinggi pada motor induksi tiga fasa, maka dirancanglah motor tersebut dengan memiliki tahanan rotor yang kecil.
Perusahaan industri banyak menggunakan motor induksi tiga fasa dalam proses produksinya. Salah satunya motor induksi dipakai sebagai Hoisting/Crane, dimana Hoisting/crane ini difungsikan untuk mengangkat atau memindahkan suatu material maupun peralatan yang memiliki massa yang besar dari satu tempat ke tempat yang lain.
Kinerja kerja sebuah motor induksi tiga fasa dipengaruhi oleh besar jatuh tegangan yang terdapat selama operasi. Jatuh tegangan ini juga akan mempengaruhi kemampuan angkat Hoisting/Crane yang diakibatkan oleh Torsi pada motor yang beroperasi, hal ini juga akan mempengaruhi efisiensi dari motor itu sendiri.
Oleh sebab itu pada tugas akhir ini penulis akan melakukan analisis pengaruh besar perubahan tegangan input terhadap kemampuan angkat motor Hoisting/Crane. Dimana pengujiannya akan dilakukan di PT. Inalum.
Kata Kunci: Motor Induksi, Hoisting
DAFTAR ISI
KATA PENGANTAR ... ii
ABSTRAK ... iv
DAFTAR ISI ... v
DAFTAR GAMBAR ... viii
DAFTAR TABEL ... x
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Permasalahan ... 1
1.3 Perumusan Masalah ... 2
1.4 Batasan Masalah ... 2
1.5 Kegunaan dan Manfaat Penulisan ... 2
1.6 Sistematika Penulisan ... 3
BAB II MOTOR INDUKSI TIGA PHASA ... 5
2.1 Umum ... 5
2.2 Konstruksi Motor Induksi Tiga Phasa ... 6
2.3 Jenis Motor Induksi Tiga Fasa ... 8
2.3.1 Motor Induksi Tiga Fasa Sangkar Tupai ( Squirrel cage Motor) ... 8
2.3.2 Motor Induksi Tiga Fasa Rotor Belitan ( wound rotor motor ) ... 10
vi
2.4.1 Analisis Secara Vektor ... 14
2.5 Slip ... 15
2.6 Prinsip Kerja Motor Induksi Tiga Phasa ... 16
2.7 Frekuensi Rotor ... 19
2.8 Rangkaian Ekivalen Motor Induksi ... 20
2.9 Disain Motor Induksi Tiga Fasa ... 26
2.10 Aliran Daya Motor Induksi ... 28
2.11 Efisiensi Motor Induksi Tiga Phasa ... 31
2.12 Torsi Motor Induksi ... 32
2.13 Parameter Motor Induksi Tiga Fasa ... 36
2.13.1 Percobaan DC ... 36
2.14 Hoist Crane ... 39
2.14.1 Motor Hoist/Crane ... 39
2.15 Pengaruh Jatuh Tegangan Jala – jala Terhadap Torsi Motor Hoist Crane . 41 BAB III PENGUJIAN MOTOR HOIST ... 43
3.1 Umum ... 43
3.2 Tujuan pengujian motor Hoist Crane ... 43
3.3 Peralatan dan instrumen yang digunakan... 43
3.4 Diagram pengujian ... 44
3.4.1. Percobaan DC... 45
3.4.2. Percobaan motor Hoist Crane ... 45
3.5 Langkah – langkah percobaan motor Hoist Crane ... 46
3.6 Data hasil pengujian ... 47
BAB IV ANALISA DATA PERUBAHAN TEGANGAN INPUT TERHADAP KAPASITAS ANGKAT MOTOR HOIST/CRANE 50 4.1 Umum ... 50
4.2 Analisa data hasil pengujian ... 50
4.2.1 Pengaruh perubahan tegangan terhadap faktor daya... 50
4.2.2 Analisa pengaruh perubahan tegangan terhadap kapasitas angkat motor hoist/crane ... 52
4.3 Tabel hasil analisa data ... 55
4.3.1 Tabel analisa data pengaruh perubahan tegangan input terhadap faktor daya motor hoist crane ... 55
4.3.2 Tabel analisa data pengaruh jatuh tegangan jala – jala terhadap torsi motor hoist/crane ... 55
BAB V PENUTUP ... 57
5.1 Kesimpulan ... 57
5.2 Saran ... 57
viii DAFTAR GAMBAR
Gambar 2.1 Penampang rotor dan stator motor induksi ... 6
Gambar 2.2 Menggambarkan komponen stator motor induksi tiga phasa ... 7
Gambar 2.3 Rotor sangkar, ... 9
Gambar 2.4 Konstruksi motor induksi rotor sangkar ... 10
Gambar 2.5 Cincin slip ... 11
Gambar 2.6 Rotor belitan ... 12
Gambar 2.7 Diagram phasor dan arus phasa seimbang ... 13
Gambar 2.8 Medan putar pada motor induksi tiga phasa ... 13
Gambar 2.9 Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu lingkar ... 14
Gambar 2.10 Diagram vektor untuk fluks total pada keadaan 1, 2, 3, 4... 14
Gambar 2.11 Prinsip kerja motor induksi ... 17
Gambar 2.12 Rangkaian ekivalen stator motor induksi... 20
Gambar 2.13 Rangkaian ekivalen pada rotor motor induksi ... 23
Gambar 2.14 Rangkaian ekivalen motor induksi tiga phasa ... 24
Gambar 2.15 Rangkain ekivalen dilihat dari sisi stator motor induksi ... 24
Gambar 2.16 Rangkaian ekivalen dilihat dari sisi stator motor induksi ... 25
Gambar 2.17 Rangkaian ekivalen lain dari motor induksi ... 26
Gambar 2.18 Karakteristik torsi dan kecepatan motor induksi pada berbagai disain ... 27
Gambar 2.19 Diagram aliran daya motor induksi ... 30
Gambar 2.20 Efiesiensi pada motor induksi ... 31
Gambar 2.21 Rangkaian phasa stator saat pengukuran DC hubungan Y ... 37
Gambar 2.22 Rangkaian phasa stator saat pengukuran DC hubungan Delta ... 37
Gambar 2.23 Rangakaian phasa stator saat pengukuran DC hubungan Delta .... 38
Gambar 2.24 Hoisting/Crane ... 39
Gambar 2.25 Nameplat motor Hoist/Crane ... 40
Gambar 2.26 Motor Pressure Fan Rectifier Box ... 40
Gambar 3.1 Percobaan DC ... 45
Gambar 3.2 Diagram Percobaan motor Hoist Crane ... 45
Gambar 3.4 Pemasangan alat ukur ... 49
Gambar 3.5 Pengambilan data percobaan ... 49
Gambar 4.1 Kurva pengaruh jatuh tegangan terhadap faktor daya motor hoist/crane ... 56
x DAFTAR TABEL
Tabel 3.1 Data Percobaan DC ... 47
Tabel 3.2 Data percobaa tegangan normal ... 47
Tabel 3.3 Data Percobaan Beban 1 Ton ... 47
Tabel 3.4 Data Percobaan Beban 2 Ton ... 48
Tabel 3.5 Data Percobaan Beban 3 Ton ... 48
Tabel 4.1 Tabel analisa data pengaruh jatuh tengan ... 55
Tabel 4.2 Tabel analisa data pengaruh perubahan tegangan input terhadap torsi motor hoist/crane ... 55
ABSTRAK
Motor induksi tiga fasa semakin banyak digunakan di perindustrian, hal ini dikarenakan Penggunaan dan perawatan motor induksi tiga fasa lebih sederhana, pemasangannya tidak sulit, dan biayanya lebih murah dari pada motor sinkron. Untuk mendapatkan efisiensi yang tinggi pada motor induksi tiga fasa, maka dirancanglah motor tersebut dengan memiliki tahanan rotor yang kecil.
Perusahaan industri banyak menggunakan motor induksi tiga fasa dalam proses produksinya. Salah satunya motor induksi dipakai sebagai Hoisting/Crane, dimana Hoisting/crane ini difungsikan untuk mengangkat atau memindahkan suatu material maupun peralatan yang memiliki massa yang besar dari satu tempat ke tempat yang lain.
Kinerja kerja sebuah motor induksi tiga fasa dipengaruhi oleh besar jatuh tegangan yang terdapat selama operasi. Jatuh tegangan ini juga akan mempengaruhi kemampuan angkat Hoisting/Crane yang diakibatkan oleh Torsi pada motor yang beroperasi, hal ini juga akan mempengaruhi efisiensi dari motor itu sendiri.
Oleh sebab itu pada tugas akhir ini penulis akan melakukan analisis pengaruh besar perubahan tegangan input terhadap kemampuan angkat motor Hoisting/Crane. Dimana pengujiannya akan dilakukan di PT. Inalum.
1 BAB I
PENDAHULUAN 1.1 Latar Belakang
Motor induksi tiga fasa merupakan jenis motor yang paling banyak digunakan pada perindustrian, salah satunya PT. INALUM yang menggunakan motor induksi sebagai motor pengerak Hoist/Crane di gedung produksi, reparasi maupun gudang. Motor induksi dipilih karena harga yang lebih ekonomis serta perawatannya yang mudah. Namun motor induksi juga memiliki kelemahan dibidang efisiensi dan torsi yang disebabkan beberapa aspek termasuk besar tegangan jatuh sehingga mempengatuhi kemampuan angkat Hoist/Crane.
Selama motor induksi bekerja, akan terdapat jatuh tegangan yang akan dapat mempengaruhi kinerja kerja sebuah motor induksi. Jatuh tegangan tersebut akan mempengaruhi torsi motor yang dihasil sehingga sedikit banyak akan berdampak pada kemampuan angkat Hoist. Untuk itu perlu dilakukan analisa besar pengaruh perubahan tegangan input terhadap kemampuan motor induksi tiga fasa yang difungsikan sebagai Hoist/crane untuk mengangkat beban.
1.2 Permasalahan
Adapun permasalahan dari tugas akhir ini adalah dalam keadaan tegangan jatuh motor hoist tetap dalam keadaan bekerja mengangkat beban, maka akan terjadi perubahan terhadap arus kerja dan torsi.
1.3 Perumusan Masalah
Perumusan masalah yang akan dikaji dalam Tugas Akhir ini adalah mengetahui berapa besar perubahan tegangan input motor Hoist/Crane dan pengaruhnya terhadap kapasitas angkat Hoist/Crane tersebut.
1.4 Batasan Masalah
Untuk menjaga agar pembahasan materi dalam Tugas Akhir ini lebih terarah, maka penulis menetapkan beberapa batasan masalah sebagai berikut :
1. Motor induksi yang penulis ambil sebagai aplikasi adalah Motor Hoist/Crane PT. INALUM.
2. Tugas akhir ini, hanya berfokus untuk melihat perbedaan besarnya jatuh tegangan terhadap kemampuan motor Hoist/Crane untuk mengangkat beban.
3. Tidak membahas gangguan yang terjadi pada motor induksi tiga fasa. 4. Rugi inti, gesek dan angin diabaikan.
5. Motor induksi tiga fasa beroperasi sendiri.
6. Tidak membahas tentang pengaturan dan mekanikal Hoist/Crane. 7. Tidak membahas tentang sistem pengereman.
8. Percobaan dilakukan di Workshop PT. INALUM. 1.5 Kegunaan dan Manfaat Penulisan
Adapun tujuan penulisan tugas akhir ini adalah Sebagai berikut : 1. Mengaplikasikan ilmu yang sudah didapat pada perkuliahan
2. Untuk memahami pengaruh besar perubahan tegangan input terhadap kemampuan angkat Motor Hoist/crane PT. INALUM.
3 1. Untuk meningkatkan pemahaman mengenai hubungan antara
tegangan, torsi dan kapasitas angkat Motor Hoist/Crane.
1.6 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut :
BAB I. PENDAHULUAN
Bab ini merupakan pendahuluan yang berisi tentang latar belakang masalah, tujuan dan manfaat penulisan, batasan masalah, metode penulisan, dan sistematika penulisan.
BAB II. MOTOR INDUKSI TIGA PHASA
Bab ini membahas mengenai motor induksi tiga phasa secara umum, konstruksi motor induksi tiga phasa, prinsip kerja motor induksi tiga phasa, medan putar, slip, rangkaian ekivalen motor induksi, parameter mesin induksi.
BAB III. PENGUJIAN MOTOR HOIST
Bab ini membahas tentang pengujian motor hoist dalam keadaan normal dan keadaan tegangan jatuh.
BAB IV. ANALISA DATA PERUBAHAN INPUT TEGANGAN
TERHADAP KAPASITAS ANGKAT MOTOR
HOIST/CRANE
Bab ini membahas tentang pengukuran dan pengumpulan data percobaan motor hoist dan analisa data yang meliputi grafik – grafik dan contoh perhitungan data.
BAB V. KESIMPULAN DAN SARAN
5 BAB II
MOTOR INDUKSI TIGA PHASA
2.1 Umum
Motor induksi merupakan motor arus bolak – balik (AC) yang paling luas digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah tangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (
) yang dihasilkan arus stator.
Motor ini memiliki konstruksi yang kuat, sederhana, handal serta berbiaya murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat berbeban penuh dan tidak membutuhkan perawatan yang banyak.
Hampir semua motor AC yang digunakan adalah motor induksi, terutama motor induksi tiga fasa yang paling banyak dipakai di perindustrian. Motor induksi tiga fasa sangat banyak dipakai sebagai penggerak di perindustrian karena banyak memiliki keuntungan, tetapi ada juga kelemahannya.
Keuntungan motor induksi tiga fasa :
1. Motor induksi tiga fasa sangat sederhana dan kuat. 2. Bianya murah dan dapat diandalkan.
3. Motor induksi tiga fasa memiliki efisiensi yang tinggi pada kondisi kerja normal.
4. Perawatanya mudah.
Kerugianya:
1. Kecepatannya tidak bisa bervariasi tanpa merubah efisiensi. 2. Kecepatannya tergantung beban.
3. Pada torsi start memiliki kekurangan.
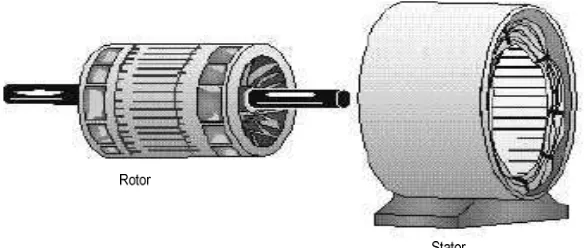
2.2 Konstruksi Motor Induksi Tiga Phasa
Secara umum motor induksi terdiri dari rotor dan stator. Rotor merupakan bagian yang bergerak, sedangkan stator bagian yang diam. Diantara stator dengan rotor ada celah udara yang jaraknya sangat kecil. Konstruksi motor induksi dapat dilihat pada Gambar 2.1.
Gambar 2.1 Penampang rotor dan stator motor induksi
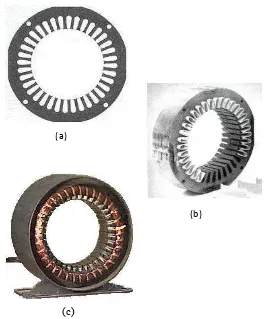
7 belitan phasa dimana untuk motor tiga phasa, belitan tersebut terpisah secara listrik sebesar 120o. Kawat kumparan yang digunakan terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian tumpukan inti dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.2.(c)). Berikut ini contoh lempengan laminasi inti, lempengan inti yang telah disatukan, belitan stator yang telah dilekatkan pada cangkang luar untuk motor induksi tiga phasa.
(a)
(c)
(a) Lempengan inti
(b) Tumpukan inti dengan kertas isolasi pada beberapa alurnya
(c) Tumpukan inti dan kumparan dalam cangkang stator
Untuk rotor akan dibahas pada bagian berikutnya yaitu jenis – jenis motor induksi tiga fasa berdasarka jenis rotornya.
(b) (a)
Gambar 2.2 Menggambarkan komponen stator motor induksi tiga phasa
2.3 Jenis Motor Induksi Tiga Fasa
Ada dua jenis motor induksi tiga fasa berdasarkan rotornya yaitu : 1. Motor induksi tiga fasa sangkar tupai ( motor ). 2. Motor induksi tiga fasa rotor belitan ( motor ).
Kedua motor ini bekerja pada prinsip yang sama dan mempunyai konstruksi stator yang sama tetapi berbeda dalam konstruksi rotor.
2.3.1 Motor Induksi Tiga Fasa Sangkar Tupai ( Motor) Penampang motor sangkar tupai memiliki konstruksi yang sederhana. Inti stator pada motor sangkar tupai tiga fasa terbuat dari lapisan – lapisan pelat baja beralur yang didukung dalam rangka stator yang terbuat dari besi tuang atau pelat baja yang dipabrikasi. Lilitan – lilitan kumparan stator diletakkan dalam alur stator yang terpisah 120 derajat listrik. Lilitan fasa ini dapat tersambung dalam hubungan delta ( F ) ataupun bintang ( Υ ).
Rotor jenis rotor sangkar ditunjukkan pada Gambar 2.3 di bawah ini.
9 Gambar 2.3 Rotor sangkar,
(a) Tipikal rotor sangkar
(b) Bagian bagian rotor sangkar
Batang rotor dan cincin ujung motor sangkar tupai yang lebih kecil adalah coran tembaga atau aluminium dalam satu lempeng pada inti rotor. Dalam motor yang lebih besar, batang rotor tidak dicor melainkan dibenamkan ke dalam alur rotor dan kemudian dilas dengan kuat ke cincin ujung. Batang rotor motor sangkar tupai tidak selalu ditempatkan paralel terhadap poros motor tetapi kerapkali dimiringkan. Hal ini akan menghasilkan torsi yang lebih seragam dan juga mengurangi derau dengung magnetik sewaktu motor sedang berputar.
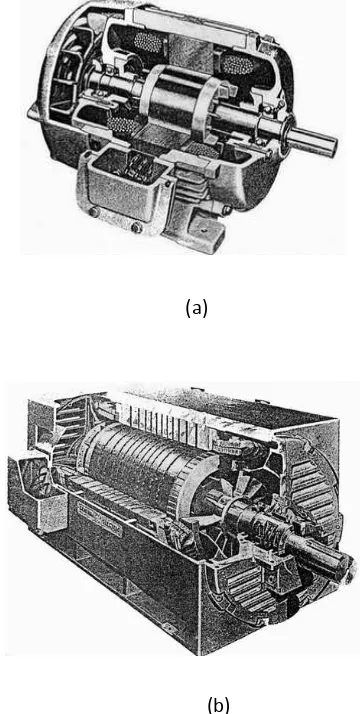
Pada ujung cincin penutup dilekatkan sirip yang berfungsi sebagai pendingin.Rotor jenis rotor sangkar standar tidak terisolasi, karena batangan membawa arus yang besar pada tegangan rendah. Motor induksi dengan rotor sangkar ditunjukkan pada Gambar 2.4 berikut.
(b)
Gambar 2.4 Konstruksi motor induksi rotor sangkar (a) Konstruksi motor induksi rotor sangkar ukuran kecil
(b) Konstruksi motor induksi rotor sangkar ukuran besar
2.3.2 Motor Induksi Tiga Fasa Rotor Belitan ( motor )
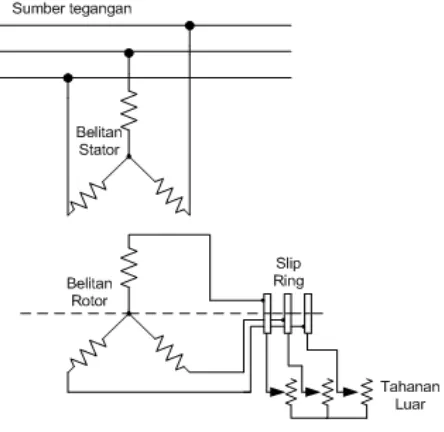
Motor rotor belitan ( motor cincin slip ) berbeda dengan motor sangkar tupai dalam hal konstruksi rotornya. Seperti namanya, rotor dililit dengan lilitan terisolasi serupa dengan lilitan stator.Lilitan fasa rotor dihubungkan secara Υ dan masing – masing fasa ujung terbuka yang dikeluarkan ke cincin slip yang terpasang pada poros rotor.Secara skematik dapat dilihat pada Gambar 2.5. Dari
(a)
11 gambar ini dapat dilihat bahwa cincin slip dan sikat semata – mata merupakan penghubung tahanan kendali variabel luar ke dalam rangkaian rotor.
Gambar 2.5 Cincin slip
Pada motor ini, cincin slip yang terhubung ke sebuah tahanan variabel eksternal yang berfungsi membatasi arus pengasutan dan yang bertanggung jawab terhadap pemanasan rotor.Selama pengasutan, penambahan tahanan eksternal pada rangkaian rotor belitan menghasilkan torsi pengasutan yang lebih besar dengan arus pengasutan yang lebih kecil dibanding dengan rotor sangkar. Konstruksi motor tiga fasa rotor belitan ditunjukkan pada gambar di bawah ini.
(a)
(b)
Gambar 2.6 Rotor belitan
(a) Rotor belitan
(b) Konstruksi motor induksi tiga phasa dengan rotor belitan
2.4 Medan Putar
Perputaran motor pada mesin arus bolak – balik ditimbulkan oleh adanya medan putar ( fluks yang berputar ) yang dihasilkan dalam kumparan statornya. Medan putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak, umumnya fasa 3.Hubungan dapat berupa hubungan bintang atau delta.
Misalkan kumparan dihubungkan 3 fasa, dengan beda fasa masing – masing 1200( Gambar 2.7a ) dan dialiri arus sinusoid. Distribusi arus a, b, c sebagai fungsi waktu adalah seperti Gambar 2.7b. Pada keadaan 1, 2,
3, dan 4, fluks resultan yang ditimbulkan oleh kumparan tersebut masing –
masing adalah seperti Gambar 2.6 , , e, dan .
Pada 1 fluks resultan mempunyai arah sama dengan arah fluks yang
13 arah sama dengan arah fluks yang dihasilakan oleh kumparan dan untuk 3
fluks resultan mempunyai arah sama dengan fluks yang dihasilkan oleh kumparan . Untuk 4, fluks resultannya berlawanan arah dengan fluks resultan yang
dihasilkan pada saat 1 keterangan ini akan lebih jelas pada analisa vektor.
(a) Diagram phasor fluksi tiga phas (b) Arus tiga phasa setimbang
Dari gambar , , , dan tersebut terlihat fluks resultan ini akan berputar satu kali. Oleh karena itu untuk mesin dengan jumlah kutub lebih dari dua, kecepatan sinkron dapat diturunkan sebagai berikut :
s =
. 120
(rpm)
= frekuensi ( Hz ) = jumlah kutub
Gambar 2.7 Diagram phasor dan arus phasa seimbang
Gambar 2.8 Medan putar pada motor induksi tiga phasa
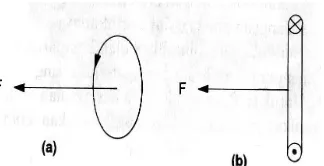
2.4.1 Analisis Secara V
Notasi yang dipaka mengalir pada kumparan positif, apabila tanda silang
), sedangkan negatif a tersebut (Gambar 2.8 ). M
3, 4, dapat dilihat pada G
Gambar 2.9 Arah fl lingkar
ara Vektor
ara vektor didapatkan atas dasar :
uks yang ditimbulkan oleh arus yang mengalir dala esuai dengan perputaran sekrup (Gambar 2.9).
an fluks yang ditimbulkan ini sebanding dengan a
dipakai untuk menyatakan positif atau negatifnya a paran , , dan pada Gambar 2.7a yai a silang (x) terletak pada pangkal konduktor tersebut gatif apabila tanda titik ( . ) terletak pada pangkal kondu 2.8 ). Maka diagram vektor untuk fluks total pada keada
ada Gambar 2.10.
15 Dari semua diagram vektor di atas dapat pula dilihat bahwa fluks resultan berjalan (berputar).
2.5 Slip
Motor induksi tidak dapat berputar pada kecepatan sinkron. Seandainya hal ini terjadi, maka rotor akan tetap diam relatif terhadap fluksi yang berputar. Maka tidak akan ada ggl yang diinduksikan dalam rotor, tidak ada arus yang mengalir pada rotor, dan karenanya tidak akan menghasilkan kopel. Kecepatan rotor sekalipun tanpa beban, harus lebih kecil sedikit dari kecepatan sinkron agar adanya tegangan induksi pada rotor, dan akan menghasilkan arus di rotor, arus induksi ini akan berinteraksi dengan fluks listrik sehingga menghasilkan kopel. Selisih antara kecepatan rotor dengan kecepatan sinkron disebut (s). Slip dapat dinyatakan dalam putaran setiap menit, tetapi lebih umum dinyatakan sebagai persen dari kecepatan sinkron.
Slip(s) = − ×100%…………...(2.1)
dimana:
=
kecepatan rotor (RPM)Persamaan (2.1) di atas memberikan imformasi yaitu :
1. saat s = 1 dimana = 0, ini berati rotor masih dalam keadaan diam atau akan berputar.
2. s = 0 menyatakan bahwa = , ini berarti rotor berputar sampai kecepatan sinkron. Hal ini dapat terjadi jika ada arus dc yang diinjeksikan ke belitan rotor, atau rotor digerakkan secara mekanik.
3. 0 < s < 1, ini berarti kecepatan rotor diantara keadaan diam dengan kecepatan sinkron. Kecepatan rotor dalam keadaan inilah dikatakan
kecepatan tidak sinkron. Biasanya slip untuk mendapatkan efisiensi yang tinggi pada saat beban penuh adalah 0,04.
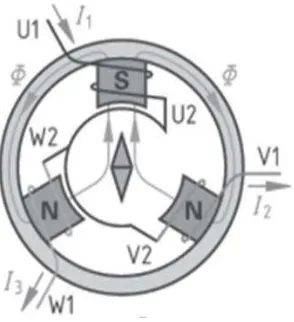
2.6 Prinsip Kerja Motor Induksi Tiga Phasa
Motor induksi adalah alat listrik yang mengubah energi listrik menjadi
energi mekanik. Listrik yang diubah adalah listrik 3 phasa. Motor induksi sering
juga disebut motor tidak serempak atau motor asinkron. Prinsip kerja motor
induksi lihat Gambar 2.11 Ketika tegangan phasa U masuk ke belitan stator
menjadikan kutub S (south = selatan), garis garis gaya magnet mengalir melalui
stator, sedangkan dua kutub lainnya adalah N (north = utara) untuk phasa V dan
phasa W. Kompas akan saling tarik menarik dengan kutub S. Berikutnya kutub S
pindah ke phasa V, kompas berputar 120°, dilanjutkan kutub S pindah ke phasa
W, sehingga pada belitan stator timbul medan magnet putar. Buktinya kompas
akan memutar lagi menjadi 240°. Kejadian berlangsung silih berganti membentuk
medan magnet putar sehingga kompas berputar dalam satu putaran penuh, proses
ini berlangsung terus menerus. Dalam motor induksi kompas digantikan oleh rotor
sangkar atau belitan yang akan berputar pada porosnya. Karena ada perbedaan
putaran antara medan putar dengan putaran rotor, maka disebut motor induksi
17 Gambar 2.11 Prinsip kerja motor induksi
Untuk memperjelas prinsip kerja motor induksi tiga fasa, maka dapat dijabarkan dalam langkah – langkah berikut :
1. Pada keadaan beban nol ketiga phasa stator yang dihubungkan dengan sumber tegangan tiga phasa yang setimbang menghasilkan arus pada tiap belitan phasa.
2. Arus pada tiap phasa menghasilkan fluksi bolak balik yang berubah ubah. 3. Amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan arahnya tegak
lurus terhadap belitan phasa.
4. Akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya adalah
e1 =
Φ
− 1 ( Volt )
atau
Φ
=
11
4
,
44
( Volt )5. Penjumlahan ketiga fluksi bolak balik tersebut disebut medan putar yang berputar dengan kecepatan sinkron s, besarnya nilai s ditentukan oleh jumlah
kutub dan frekuensi stator yang dirumuskan dengan s =120× (rpm)
6. Fluksi yang berputar tersebut akan memotong batang konduktor pada rotor. Akibatnya pada kumparan rotor timbul tegangan induksi (ggl) sebesar 2 yang
besarnya
2
=
=
=
=
4
,
44
2Φ
m………..( Volt )dimana :
2 = Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt) 2 = Jumlah lilitan kumparan rotor
Фm = Fluksi maksimum(Wb)
7. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut akan menghasilkan arus 2.
8. Adanya arus 2 di dalam medan magnet akan menimbulkan gaya pada rotor
9. Bila kopel mula yang dihasilkan oleh gaya cukup besar untuk memikul kopel beban, rotor akan berputar searah medan putar stator.
10. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron. Perbedaan kecepatan medan stator ( s) dan kecepatan rotor ( r)
disebut slip ( ) dan dinyatakan dengan
19 2s ====4,44 2Φm………..( Volt )
dimana
2s = tegangan induksi pada rotor dalam keadaan berputar (Volt)
2 = . = frekuensi rotor (frekuensi tegangan induksi pada rotor dalam
keadaan berputar)
12. Bila s = r, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada
kumparan rotor, karenanya tidak dihasilkan kopel. Kopel ditimbulkan jika
r< s.
2.7 Frekuensi Rotor
Ketika rotor masih dalam keadaan diam, dimana frekuensi arus pada rotor sama seperti frekuensi masukan ( sumber ). Tetapi ketika rotor akan berputar, maka frekuensi rotor akan bergantung kepada kecepatan relatif atau bergantung terhadap besarnya slip. Untuk besar slip tertentu, maka frekuensi rotor sebesar ' yaitu,
− =
'
120
, diketahui bahwa n = 120
Dengan membagikan dengan salah satu, maka didapatkan
=
= dan ketika arus ini mengalir pada masing – masing phasa di belitan rotor,
akanmemberikan reaksi medan magnet. Biasanya medan magnet pada rotor akan menghasilkan medan magnet yang berputar yang besarnya bergantung atau relatif terhadap putaran rotor sebesar .
Pada keadaan tertentu, arus rotor dan arus stator menghasilkan distribusi medan magnet yang sinusoidal dimana medan magnet ini memiliki magnetudo yang konstan dan kecepatan medan putar yang konstan. Kedua Hal ini merupakan medan magnetik yang berputar secara sinkron. kenyataannya tidak seperti ini karena pada stator akan ada arus magnetisasi pada kumparannya.
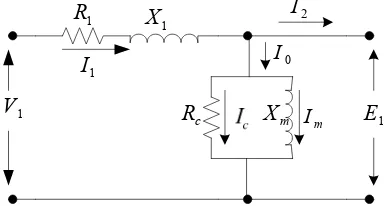
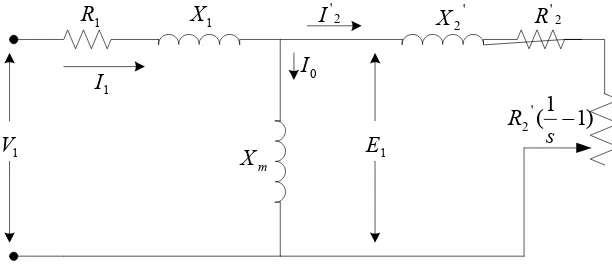
2.8 Rangkaian Ekivalen Motor Induksi
Untuk mempermudah analisis motor induksi, digunakan metoda rangkaian ekivalen per – fasa. Motor induksi dapat dianggap sebagai transformator dengan rangkaian sekunder berputar. Rangkaian ekivalen statornya dapat digambarkan sebagai berikut :
1
1 1
1
0 2
1
Gambar 2.12 Rangkaian ekivalen stator motor induksi dimana :
I0 = arus eksitasi (Amper)
V1 = tegangan terminal stator ( Volt )
21 R1 = tahanan efektif stator ( Ohm )
X1 = reaktansi bocor stator ( Ohm )
Arah positif dapat dilihat pada rangkaian Gambar 2.12.
Arus stator terbagi atas 2 komponen, yaitu komponen arus beban dan komponen arus penguat I0. Komponen arus penguat I0 merupakan arus stator tambahan yang
diperlukan untuk menghasilkan fluksi celah udara resultan, dan merupakan fungsi ggm E1.
Komponen arus penguat I0 terbagi atas komponen rugi – rugi inti IC yang
sefasa dengan E1 dan komponen magnetisasi IM yang tertinggal 900 dari E1.
Hubungan antara tegangan yang diinduksikan pada rotor sebenarnya (Erotor) dan tegangan yang diinduksikan pada rotor ekivalen ( E2S ) adalah :
2 = 2 1 =
atau
E2S = a Erotor ...…………... ( 2.3 )
dimana a adalah jumlah lilitan efektif tiap fasa pada lilitan stator yang banyaknya a kali jumlah lilitan rotor.
Bila rotor – rotor diganti secara magnetik, lilitan – ampere masing – masing harus sama, dan hubungan antara arus rotor sebenarnya Irotor dan arus I2S
pada rotor ekivalen adalah :
I2S = ………...………. ( 2.4 )
sehingga hubungan antara impedansi bocor frekuensi slip Z2S dari rotor ekivalen
dan impedansi bocor frekuensi slip Zrotor dari rotor sebenarnya adalah :
Z2S = =
Nilai tegangan, arus dan impedansi tersebut diatas didefinisikan sebagai nilai yang referensinya ke stator.
Selanjutnya persamaan ( 2.5 ) dapat dituliskan :
=
2 2 !
2 = 2+
"
2 …………...……...( 2.6 )dimana :
Z2S = impedansi bocor rotor frekuensi slip tiap fasa dengan referensi ke
stator (Ohm).
R2 = tahanan efektif referensi (Ohm).
sX2 = reaktansi bocor referensi pada frekuensi slip X2 didefinisikan
sebagai harga reaktansi bocor rotor dengan referensi frekuensi stator (Ohm).
Reaktansi yang didapat pada persamaan (2.6) dinyatakan dalam cara yang demikian karena sebanding dengan frekuensi rotor dan slip. Jadi 2 didefinisikan sebagai harga yang akan dimiliki oleh reaktansi bocor pada rotor dengan patokan pada frekuensi stator.
23 Dengan membagi persamaan (2.7) dengan persamaan (2.8) didapatkan:
=
2 2
2
1………...………..(2.9)
Didapat hubungan antara persamaan (2.8) dengan persamaan (2.9), yaitu
=
Dengan membagi persamaan (2.10) dengan s, maka didapat
2 1 = 2
+
"
2……...……(2.11)Dari persamaan (2.11) dapat dibuat rangkaian ekivalen untuk rotor.
Dari persamaan (2.6), (2.7) dan (2.11) maka dapat digambarkan rangkaian ekivalen pada rotor sebagai berikut :
2 1
Gambar 2.13 Rangkaian ekivalen pada rotor motor induksi .
2 = 2 +
Dari penjelasan mengenai rangkaian ekivalen pada stator dan rotor di atas, maka dapat dibuat rangkaian ekivalen motor induksi tiga fasa pada masing – masing fasanya. Perhatikan gambar di bawah ini.
1
Gambar 2.14 Rangkaian ekivalen motor induksi tiga phasa
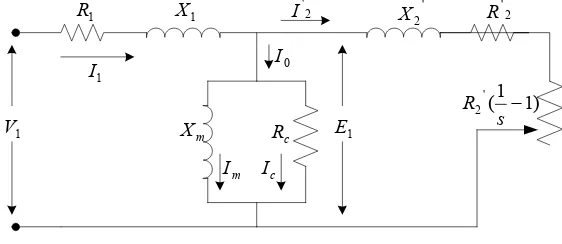
Untuk mempernudah perhitungan maka rangkaian ekivalen pada Gambar 2.14 diatas dapat dilihat dari sisi stator, rangkaian ekivalen motor induksi tiga fasa akan dapat digambarkan sebagai berikut.
1
25 Atau seperti gambar berikut :
1
Gambar 2.16 Rangkaian ekivalen dilihat dari sisi stator motor induksi dengan RL=
)
Dalam teori transformator statika, analisis rangkaian ekivalen sering disederhanakan dengan mengabaikan seluruh cabang penalaran atau melakukan pendekatan dengan memindahkan langsung ke terminal primer. Pendekatan demikian tidak dibenarkan dalam motor induksi yang bekerja dalam keadaan normal, karena adanya celah udara yang menjadikan perlunya suatu arus peneralan yang sangat besar (30% sampai 40% dari arus beban penuh) dan karena reaktansi bocor juga perlu lebih tinggi. Untuk itu dalam rangkaian ekivalen dapat dihilangkan (diabaikan).Rangkaian ekivalen menjadi Gambar 2.17 berikut.
1
Gambar 2.17 Rangkaian ekivalen lain dari motor induksi
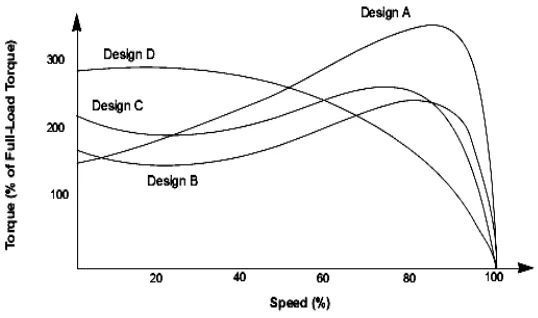
2.9 Disain Motor Induksi Tiga Fasa
Motor asinkron yang sering kita temukan sehari hari misalnya adalah kipas angin, mesin pendingin, kereta api listrik gantung, dan lain sebagainya. Untuk itu perlu diketahui kelas kelas dari motor tersebut untuk mengetahui unjuk kerja dari motor tersebut. Adapun kelas kelas tersebut adalah sebagai berikut :
1. Kelas A : Torsi start normal, arus start normal dan slip kecil
Tipe ini umumnya memiliki tahanan rotor sangkar yang rendah. Slip pada beban penuh kecil atau rendah namun efisiensinya tinggi. Torsi maksimum biasanya sekitar 21% dari torsi beban penuh dan slipnya kurang dari 21%. Motor kelas ini berkisar hingga 20 Hp.
2. Kelas B : Torsi start normal, arus start kecil dan slip rendah
Torsi start kelas ini hampir sama dengan kelas A tetapi arus startnya berkisar 75%Ifl . Slip dan efisiensi pada beban penuh juga baik. Kelas ini
3. Kelas C : Torsi sta Kelas ini memiliki dibandingkan deng memperkenalkan disain ke , namun disain kelas i
Gambar 2.
orsi start tinggi dan arus start kecil
emiliki resistansi rotor sangkar yang ganda yang leb dengan kelas B. Oleh sebab itu dihasilkan torsi s pada arus start yang rendah, namun bekerja pada efisi ndah dibandingkan kelas A dan B.
osi start tinggi, slip tinggi
emiliki resistansi rotor sangkar tunggal yang tinggi t yang tinggi pada arus start yang rendah
bahan pada keempat kelas tersebut diatas, NEM isain kelas E dan F, yang sering disebut motor induk
kelas ini sekarang sudah ditinggalkan.
2.10 Aliran Daya Motor Induksi
Pada motor induksi, tidak ada sumber listrik yang langsung terhubung ke rotor, sehingga daya yang melewati celah udara sama dengan daya yang
1 = tegangan sumber (Volt) 1 = arus masukan(Ampere)
θ = perbedaan sudut phasa antara arus masukan dengan tegangan sumber.
Daya listrik disuplai ke stator motor induksi diubah menjadi daya mekanik pada poros motor. Berbagai rugi – rugi yang timbul selama proses konversi energi listrik antara lain :
1. Rugi – rugi tetap ( # ), terdiri dari :
rugi – rugi gesek dan angin 2. Rugi – rugi variabel, terdiri dari :
rugi – rugi tembaga stator ( Pts )
29 rugi – rugi tembaga rotor ( Ptr )
Ptr = 3. I22. R2( Watt ) ………...( 2.16 )
Daya pada celah udara ( Pcu ) dapat dirumuskan dengan :
Pcu = Pin – Pts – Pi ( Watt ) …………...……( 2.17 )
Jika dilihat pada rangkaian rotor, satu – satunya elemen pada rangkaian ekivalen yang mengkonsumsi daya pada celah udara adalah resistor R2 / s. Oleh
karena itu daya pada celah udara dapat juga ditulis dengan :
Pcu = 3. I22. 2 ( Watt ) ………...…..( 2.18 )
Apabila rugi – rugi tembaga dan rugi – rugi inti dikurangi dengan daya input motor, maka akan diperoleh besarnya daya listrik yang diubah menjadi daya mekanik.
Besarnya daya mekanik yang dibangkitkan motor adalah :
Pmek = Pcu – Ptr( Watt ) ……...( 2.19 )
Pmek = 3. I22. 2 3. I22. R2
Pmek = 3. I22. R2. (
−
1
)
Pmek = Ptr x (
−
1
) ( Watt ) …………...( 2.20 )
Dari persamaan ( 2.16 ) dan ( 2.18 ) dapat dinyatakan hubungan rugi – rugi tembaga dengan daya pada celah udara :
Ptr = s. Pcu( Watt ) ………...( 2.21 )
Karena daya mekanik yang dibangkitkan pada motor merupakan selisih dari daya pada celah udara dikurangi dengan rugi – rugi tembaga rotor, maka daya mekanik dapat juga ditulis dengan :
Pmek = Pcu x ( 1 – s ) ( Watt ) ……...……( 2.22 )
Daya output akan diperoleh apabila daya yang dikonversikan dalam bentuk daya mekanik dikurangi dengan rugi – rugi gesek dan angin, sehingga daya keluarannya :
Pout = Pmek – Pa&g – Pb( Watt ) …………...( 2.23 )
Secara umum, perbandingan komponen daya pada motor induksi dapat dijabarkan dalam bentuk slip yaitu :
Pcu :Ptr : Pmek = 1 : s : 1 – s.
Gambar 2.19 menunjukkan aliran daya pada motor induksi tiga phasa :
Energi listrik konversi Energi mekanik
31 2.11 Efisiensi Motor Induksi Tiga Phasa
Efisiensi dari suatu motor induksi didefenisikan sebagai ukuran keefektifan motor induksi untuk mengubah energi listrik menjadi energi mekanik yang dinyatakan sebagai perbandingan / rasio daya ( keluaran ) dengan daya input ( masukan ), atau dapat juga dirumuskan dengan :
Loss
Dari persamaan di atas dapat dilihat bahwa efisiensi motor tergantung pada besarnya rugi – rugi. Pada dasarnya metode yang digunakan untuk menentukan efisiensi motor induksi bergantung pada dua hal apakah motor itu dapat dibebani secara penuh atau pembebanan simulasi yang harus digunakan.
dimana :
Pcu = daya yang diinputkan ke rotor ( Watt )
Ptr= rugi – rugi tembaga rotor ( Watt )
Pmek = daya mekanik dalam bentuk putaran ( Watt )
Efisiensi dari motor induksi dapat diperoleh dengan melakukan pengujian beban nol dan pengujian hubung singkat. Dari pengujian beban nol akan diperoleh
Gambar 2.20 Efiesiensi pada motor induksi
rugi – rugi mekanik dan rugi – rugi inti. Rugi – rugi tembaga stator tidak dapat diabaikan sekalipun motor berbeban ringan maupun tanpa beban.
2.12 Torsi Motor Induksi
Persamaan torsi (Te) motor induksi untuk berbagai kecepatan dapat
dihitung dengan menggunakan persamaan dibawah ini.
Te = . ...(2.27)
dimana 9,55 adalah faktor pengali dengan nilai .
Diketahui
Pmek = Pcu x ( 1 – s ) ( Watt )
Nr = Ns (1 S)
Maka,
Te =
. ( )
( ) ...(2.28) dimana, Pcu = Pin – Pts – Pi
maka, persamaan torsi diperoleh
Te =
.
=
. ( – ) ...(2.29)Pada umumnya torsi dapat dilihat dari 2 keadaan, yaitu : 1. Keadaan
Pada saat awal motor di start torsi yang dibangkitkan oleh motor induksi lebih besar daripada keadaan operasi normal, walaupun hanya sesaat.
Misalnya :
33 R2 = resistansi rotor per fasa pada keadaan diam.
X2 = reaktansi rotor per fasa pada keadaan diam (X2=s.X2,
Dari persamaan umum :
( = ) × # × " × $%&'(Nm)……….………. (2.30)
maka berlaku hubungan :
( = ) ∙
/.(/.).0(1.).
= ) ∙
(4./.). ………(2.33)di mana adalah k2 suatu konstanta.
Selain besar torsi mula, torsi mula maksimum juga dapat ditentukan. Dari persamaan (2.33) diatas, dengan syarat kondisi maksimum : 567
5/.
= 0,
maka ::(
: = ) ∙( ) + (! ) −1 ( ) + (! ) = 0∙ (2 )
( ) + (! ) = 2 ∙ ( )
∴ = !
Jadi torsi mula maksimum akan terpenuhi jika besarnya resistansi rotor sama dengan reaktansi rotor. Hal lain yang mempengaruhi besarnya torsi mula motor induksi adalah perubahan tegangan pasokan (V1). Karena V1∝ E2 dari persamaan (2.32) :
Pada keadaan motor induksi beroperasi, parameter yang terhubung dengan frekuensi akan dipengaruhi oleh nilai slip. Dengan meninjau rangkaian ekivalen percobaan beban nol dan hubung singkat dari motor induksi tiga fasa, didapat :
= + B! ……… Impedansi stator.
C = ( ′/&) + B! ′……… Impedansi rotor dengan
sisi primer/stator sebagai referensi.
35
E2 = ggl induksi/fasa dalam keadaan diam
X2 = reaktansi/fasa dalam keadaan diam
f2 =frekuensi/fasa dalam keadaan diam
maka dalam keadaan operasi : Er = s.E2 ; fr = s.f2 : Xr = s.X2
adapun persamaan torsinya :
2.13 Parameter Motor Induksi Tiga Fasa
Parameter rangkaian ekivalen dapat dicari dengan melakukan pengukuran pada percobaan tahanan DC, percobaan beban nol, dan percobaan rotor tertahan (block rotor). Dengan penyelidikan pada setiap rangkaian ekivalen, percobaan beban nol motor induksi dapat disimulasikan dengan memaksimalkan tahanan
rotor 2
'
. Halini bisa terjadi pada keadaan normal jika slip dalam nilai yang
minimum. Slip yang mendekati nol terjadi ketika tidak ada beban mekanis, dan mesin dikatakan dalam keadaan berbeban ringan.
Pengukuran rotor tertahan dilakukan dengan menahan rotor tetap diam. Pada kondisi ini slip bernilai satu yang merupakan nilai slip tertinggi untuk
kondisi motor, jadi nilai 2
'
bernilai minimum. Untuk menentukan bentuk
rangkaian ekivalen, pola fluksi dianggap sinusoidal, demikian juga rugi rugi yang diukur proporsional terhadap fluksi utama, dan kejenuhan diabaikan.
2.13.1 Percobaan DC
Untuk memperoleh harga 1 dilakukan dengan pengukuran DC yaitu dengan menghubungkan sumber tegangan DC ( DC) pada dua terminal input dan
arus DC nya ( DC) lalu diukur. Di sini tidak mengalir arus rotor karena tidak ada
37 1. Kumparan hubungan Wye (Y)
Gambar rangkaian ketika kumparan motor induksi tiga phasa terhubung Y, dan diberi suplai DC dapat dilihat pada Gambar 2.21 di bawah ini.
Gambar 2.21 Rangkaian phasa stator saat pengukuran DC hubungan Y
Harga 1%$ dapat dihitung, untuk kumparan dengan hubungan Y, adalah sebagai berikut :
DC DC DC
1 2 1
= = =
= ( Ohm )...(2.47)
2. Kumparan Hubungan Delta (∆)
Gambar rangkaian ketika kumparan motor induksi tiga phasa terhubung delta dan diberi suplai DC, dapat dilihat pada Gambar2.22 di bawah ini.
Gambar 2.22 Rangkaian phasa stator saat pengukuran DC hubungan Delta
Diketahui bahwa tahanan pada kumparan pada masing – masing phasa adalah sama, maka ' = & = $ = . Jadi gambar diatas dapat disederhanakan menjadi gambar berikut.
' %$
%$
'
Gambar 2.23 Rangakaian phasa stator saat pengukuran DC hubungan Delta
Dimana = & + $
balik, karena pada operasi arus bolak balik resistansi konduktor meningkat karena distribusi arus yang tidak merata akibat efek kulit dan medan magnet yang
39 mengetahui nilai tahanan yang paling mendekati, biasanya dilakukan dengan beberapa kali pengukuran dan mengambil besar rata rata dari semua pengukuran yang dilakukan.
2.14 Hoist Crane
Umumnya setiap industri banyak mengunakan peralatan ataupun material dalam ukuran dan bobot yang berat. Untuk memudahkan dalam proses )
digunakanlah Hoist/Crane untuk mengangkat atau mengangkut material ataupun peralataran digedung produksi, gudang dan lainnya. Gambar Hoist/crane dapat dilihat pada Gambar 2.24 dibawah ini :
Gambar 2.24 Hoisting/Crane
2.14.1 Motor Hoist/Crane
Motor Hoist/Crane yang digunakan oleh PT. INALUM adalah motor induksi dengan sepesifikasi seperti berikut:
Volt : 380 Volt Hz : 50 Hz Rpm : 1450 Rpm Arus : 15A Daya : 7,7 kW
Gambar 2.25 Nameplat motor Hoist/Crane
Motor ini berfungsi sebagai penggerak dari Hoist/Crane untuk mengangkat dan menurunkan peralatan pada gedung penyimpanan ( * + ) PT. INALUM dengan kapasitas 5 Ton. Gambar Motor Hoist/Crane dapat dilihat pada Gambar 2.26 dibawah ini :
41 2.15 Pengaruh Jatuh Tegangan Jala – jala Terhadap Torsi Motor Hoist
Crane
Dalam penyediaan tenaga listrik disyaratkan suatu level standard tertentu untuk menentukan kualitas tegangan pelayanan. Secara umum ada tiga hal yang perlu dijaga kualitasnya :
1. Frekuensi (50Hz)
2. Tegangan (220/380) Volt : ± 5 % 10%) 3. Keandalan.
Dalam penyediaan tenaga listrik dilakukan penggolongan beban untuk memenuhi keandalan dari sistem.Dengan bervariasinya karakteristik beban maka perlu digolongkan berdasarkan faktor faktor dominan, misalnya lingkungan /geografi, ketergantungan terhadap pelayanan tenaga listrik, pengaruh beban yang satu terhadap yang lain, dan sebagainya.Dari penggolongan beban tersebut kebijaksanaan pelayanan penyediaan tenaga listrik dapat diarahkan untuk memperoleh optimasi. Pada kenyataannya tegangan listrik hanya dihasilkan oleh produsen tenaga listrik bukanlah tegangan yang berkualitas sempurna. Tegangan listrik ini seringkali disalurkan kepada konsumen dengan berbagai kelemahan. Salah satu kelemahan tersebut ialah adanya rugi tegangan pada saluran sehingga tegangan yang diterima ditempat yang paling jauh dengan sumber tenaga akan lebih kecil dari tegangan nominal. Rugi tegangan pada saluran atau yang sering disebut jatuh tegangan (Vd) dapat dinyatakan dengan rumus sebagai berikut :
Voltage drop = Vs – Vr ...(2.33) Keterangan :
Vs : tegangan pengiriman dari sumber Vr : tegangan penerimaan disisi beban.
Dari tinjauan dan kondisi adanya tegangan pada sebuah tahanan menyebabkan arus mengalir melalui tahanan tersebut.Bila keadaan ini terjadi didalam kabel kabel utama atau saluran yang panjang, hal ini sering
dihubungkan sebagai penurunan tegangan, penurunan IR atau penurunan pada tahanan. Penurunan tegangan ini bisa juga dilihat sebagai akibat usaha yang harus dikeluarkan untuk mengatasi perlawanan terhadap aliran arus dan harus dikeluarkan dari tegangan sumber agar mendapatkan tegangan yang sebenarnya pada beban. Dari persamaan dibawah ini :
Ib =
bcdAeP f...(2.24) Terlihat pengaruh jatuh tegangan akan menyebabkan arus beban meningkat, yang akhirnya akan menyebabkan rugi – rugi tembaga stator (Pts)
43 BAB III
PENGUJIAN MOTOR HOIST
3.1 Umum
Untuk mendapatkan parameter yang dibutuhkan untuk mencari pengaruh jatuh tegangan terhadap kemampuan angkat dari sebuah motor hoist crane dibutuhkan beberapa data seperti tahanan stator (R1).Untuk mendapatkan
parameter tersebut dapat dilakukan dengan percobaan DC.
Untuk mendapatkan nilai dari kekuatan angkat dari sebuah motor hoist crane dalam keadaan normal dan dalam keadaan jatuh tegangan, dapat dilakukan dengan mengukur daya input, arus, dan tegangan kerja pada saat motor hoist crane bekerja.
3.2 Tujuan pengujian motor Hoist Crane
Adapun tujuan dari pengujian motor hoist crane dalam keadaan jatuh tegangan adalah :
1. Untuk memahami pengaruh besartegangan jala – jala terhadap kemampuan angkat Motor Hoist/crane PT. INALUM.
3.3 Peralatan dan instrumen yang digunakan
Dalam percobaan ini dipergunakan beberapa peralatan dan istrumen antara lain :
Motor induksi
Type : Rotor sangkar tupai Maker : Meidensha
Spesifikasi : 7.7 kW, 4 P, 380V, 50 Hz, 15 A Class F, 1450 rpm
Ampermeter Maker : Extech Wattmeter
Maker : Yokogawa Type : CW 140 Autotransformer
Maker : Toshiba Kabel perhubung Multimeter
Maker : Fluke 3.4 Diagram pengujian
Adapun percobaan yang akan dilakukan adalah :
1. Percobn DC
45 3.4.1. Percobaan DC
Gambar 3.1 Percobaan DC
3.4.2. Percobaan motor Hoist Crane
Adapun diagram percobaan untuk pengukuran kemampuan angkat dari sebuah motor hoist adalah sebagai berikut :
Gambar 3.2 Diagram Percobaan motor Hoist Crane
3.5 Langkah – langkah percobaan motor Hoist Crane 1. Percobaan DC
1. Hubungan kedua terminal tegangan dc ke input tegangan motor hoist crane seperti pada Gambar 3.1 diatas.
2. Rangkaian belitan stator dihubungkan dengan suplai tegangan DC. 3. Tegangan DC suplai dinaikkan sampai pada nilai tertentu.
4. Ketika tegangan menunjukkan pada besaran yang telah ditentukan, penunjukan alat ukur voltmeter dan amperemeter dicatat.
5. Jika telah selesai rangkaian dilepas.
2. Percobaan motor Hoist Crane
1. Rangkaikan alat – alat percobaan seperti pada Gambar 3.5 diatas.
2. Masukkan suplai tegangan input sesuai dengan spesifikasi motor hoist crane yaitu 380 V.
3. Angkat beban yang telah ditentukan.
4. Pada saat motor mengangkat beban, catat penunjukan daya input (Pin), arus stator (I1), dan tegangan intput (V1).
5. Lakukan langkah – langkah percobaan dari nomor 2 s/d 4 untuk nilai tegangan yang telah ditentukan.
47 3.6 Data hasil pengujian
1. Percobaan DC
Vdc Idc
5,991 0,496
Tabel 3.1 Data Percobaan DC
2. Percobaan motor Hoist Crane ) Tegangan normal
) Beban 1 ton
% drop voltage Teg. Input(V) Arus(A) Daya(W) Beban terangkat
2% 372,4 9,2 3310 ok
4% 364,8 8,6 2990 ok
6% 357,2 8,4 2780 ok
8% 349,6 8,2 2580 ok
10% 342 8,0 2380 ok
12% 334,4 7,6 2190 ok
14% 326,8 62 12000 tidak
Tabel 3.3 Data Percobaan Beban 1 Ton Beban Teg. Input(V) Arus(A) Daya(W)
1 Ton 379,6 6,8 3420
2 Ton 379,6 7,3 4680
3 Ton 379,6 9,3 5850
Tabel 3.2 Data percobaa tegangan normal
) Beban 2 ton
Beban 3 ton
% drop voltage Teg.Input(V) Current(A) Daya(W) Beban terangkat
2% 372,4 9,8 3180 ok
4% 364,8 9,6 2960 ok
6% 357,2 9,5 2700 ok
8% 349,6 9,3 2460 ok
10% 342 9,1 2390 ok
12% 334,4 9,1 2260 ok
14% 326,8 65,5 12700 tidak
Tabel 3.4 Data Percobaan Beban 2 Ton
% drop voltage Teg.Input(V) Current(A) Daya(W) Beban terangkat
2% 372,4 11,4 3240 ok
4% 364,8 11 2880 ok
6% 357,2 10,9 2680 ok
8% 349,6 10,9 2450 ok
10% 342 10,8 2360 ok
12% 334,4 10,7 2130 ok
14% 326,8 66,4 12600 tidak
49 Gambar 3.3 Pemasangan alat ukur
Gambar 3.4 Pengambilan data percobaan
BAB IV
ANALISA DATA PERUBAHAN TEGANGAN INPUT TERHADAP KAPASITAS ANGKAT MOTOR HOIST/CRANE
4.1 Umum
Setelah melakukan percobaan dan mendapatkan data – data yang diinginkan pada bab sebelumnya, maka pada bab ini, data tersebut akan dianalisa untuk mendapatkan pengaruh perubahan tegangan input terhadap kapasitas angkat motor hoist/crane.
4.2 Analisa data hasil pengujian Dari percobaan dc diperoleh nilai R1
R1 = 1,2 x
A5Z dg5Z
= 1,2 x , d ,h = 7,24 Ω
4.2.1 Pengaruh perubahan tegangan terhadap faktor daya Cos φ =
A dg
Keadaan normal Beban 1 ton Cos φ
,ic dA dg = = ch
Cos φ = 0,459
4.2.2 Analisa pengaruh perubahan tegangan terhadap kapasitas angkat motor hoist/crane
Kapasitas angkat sebuah motor hoist crane dapat dilihat dari besar torsi yang dihasilkan pada saat mengankat beban.
Te =
.
53
=
. R( –Ug3.d/3WSDimana Ns = 1450 Rpm
Keadaan normal Beban 1 ton Te = 22,30 Nm Beban 2 ton Te = 30,56 Nm Beban 3 ton Te = 36,11 Nm
Keadaan jatuh tegangan Beban 1 ton
Jatuh tegangan = 2 % Te = 21,39 Nm
Jatuh tegangan = 4 % Te = 19,39 Nm
Jatuh tegangan = 6 % Te = 17,97 Nm
Jatuh tegangan = 8 % Te = 16,67 Nm
55 4.3 Tabel hasil analisa data
4.3.1 Tabel analisa data pengaruh perubahan tegangan input terhadap faktor daya motor hoist crane
Beban
Tabel 4.1 Tabel analisa data pengaruh jatuh tengangan terhadap faktor daya
4.3.2 Tabel analisa data pengaruh jatuh tegangan jala – jala terhadap torsi motor hoist/crane
Tabel 4.2 Tabel analisa data pengaruh perubahan tegangan input terhadap torsi motor hoist/crane
Keterangan :
OK : Hoist crane dapat mengangkat beban Tidak : Hoist crane tidak dapat mengangkat beban
Gambar 4.1 Kurva pengaruh jatuh tegangan terhadap faktor daya motor hoist/crane
Gambar 4.2 Kurva pengaruh perubahan tegangan terhadap torsi motor hoist/crane
0
Jatuh tegangan Vs Faktor daya
57 BAB V
PENUTUP 5.1 Kesimpulan
1. Dengan terjadinya perubahan tegangan pada input maka kapasitas angkat dari hoist crane berkurang namun masih bisa mengangkat beban yang dipasang sampai dengan nilai turunnya tegangan input sebesar 12%, dapat dilihat pada tabel hasil analisa data dan kurva hasil analisa data, hal ini terjadi karena daya input yang dihasilkan hoist crane juga menurun seiring turunnya tegangan input, namun pada keadaan tegangan turun sebesar 14% hoist crane mengalami overload akibat tegangan yang diberikan tidak cukup kuat untuk mengangkat beban yang dipasang.
2. Dengan terjadinya jatuh tegangan pada input, maka faktor daya dari hoist crane menurun, dapat dilihat pada tabel hasil analisa data dan kurva analisa data, hal ini disebabkan karena menurunnya daya input yang dihasilkan.
5.2 Saran
1. Di dalam sebuah pabrik, banyak terdapat peralatan yang menggunakan motor, terutama motor induksi, seperti pompa, pendingin, dan sebagainya yang penggunaannya sangat vital, untuk itu penulis menyarankan agar untuk selanjutnya membahas tentang pengaruh jatuh tegangan terhadap alat – alat listrik lainnya yang terdapat pada sebuah industri pabrik.
DAFTAR PUSTAKA
1. Chapman, Stephen J. 1999. “ , + - . ”. New York: Third Edition Mc Graw Hill Companies.
2. Lister, E.C. 1984. “, ( / (01 Sixth Edition, McGraw Hill, Inc., .diterjemahkan oleh Ir.Drs. Gunawan, H., P.T. 1993. Gelora Aksara Pratama.
3. Theraja, B.L. & Theraja, A.K. 2001. “' 2 # & ( 2 + -”, New Delhi: S.Chand and Company Ltd.
4. Wijaya, Mochtar. 2001.”% % , / (”. Jakarta: Penerbit Djambatan.
5. Wildi, Theodore,. 1983. “ , + % ) ' - 0
Liverpool: Prentice Hall International.
6. Grundes. (2004). “& ( , ”. Denmark: Grundfos Management A/S 7. Anonim Crane dan