KERJA
Oleh :
Nama : SHOCHIBAH YATIMATUL ASMAK
NIM : 11.41020.0039 Program : S1 (Strata Satu)
Fakultas : Teknologi dan Informatika Jurusan : Sistem Komputer
INSTITUT BISNIS DAN INFORMATIKA STIKOM
SURABAYA
x
Halaman
HALAMAN SAMPUL ... i
HALAMAN SYARAT ... ii
HALAMAN PERSEMBAHAN ... iii
HALAMAN PENGESAHAN PIHAK INSTITUT ... iv
HALAMAN PENGESAHAN PIHAK PENYELIA ... v
xi
2.2 Pusat Sains dan Teknologi Akselerator (PSTA) ... 16
xii
4.2 Perancangan Rangkaian Simulasi ... 57
4.2.1 Microcontroller Atmega 8 ... 58
4.2.2 GPS (Global Positioning System) dan Protokol NMEA 0183 ... 58
4.2.3 Compim ... 59
4.3 Perancangan Program ... 64
4.3.1 Program Utama pada Microcontroller ... 64
4.3.2 Program Pendukung ... 69
BAB V PENUTUP ... 71
xiii
5.2 Saran ... 71
DAFTAR PUSTAKA ... 72
LAMPIRAN ... 74
Lampiran 1. Simulasi Rangkaian ISIS Proteus ... 74
Lampiran 2. Listing Program ... 78
Lampiran 3. Surat Balasan Perusahaan / Instansi ... 91
Lampiran 4 Form KP 5 (Acuan Kerja Halaman 1 dan 2) ... 92
Lampiran 5 Form KP 6 (Log Harian Halaman 1- 3) ... 94
Lampiran 6 Form KP 7 (Absensi Harian Halaman 1 dan 2) ... 97
Lampiran 7 Kartu Bimbingan Kerja Praktek ... 99
1 1.1. Latar Belakang
Pusat Sains dan Teknologi Akselerator (PSTA) adalah salah satu institusi litbang dari Badan Tenaga Nuklir Nasional (BATAN) yang berlokasi di Yogyakarta. PSTA memiliki banyak bidang dimana terdapat beberapa sub bidang di dalamnya. Salah satunya adalah BK-3 atau Bidang Keselamatan Kerja dan Keteknikan yang bertugas melaksanakan pengendalian keselamatan kerja, pelayanan kesehatan serta intsrumentasi penunjang keselamatan kerja. Bidang ini terbagi menjadi dua sub bidang yaitu sub bidang Keselamatan Kerja Proteksi Radiasi dan Lingkungan yang bertugas untuk melakukan pelayanan kesehatan dan melakukan proteksi radiasi serta sub bidang Keteknikan bertugas untuk menjalankan konstruksi, perawatan dan penelitian instrumen nuklir.
Keselamatan dan Kesehatan Kerja (K3) adalah segala kegiatan untuk menjamin dan melindungi keselamatan dan kesehatan tenaga kerja melalui upaya pencegahan kecelakaan kerja dan penyakit akibat kerja. Dalam menyusun rencana K3 sebagaimana dimaksud pasal 9 ayat 2 pada PP No 50 tahun 2012 instansi harus mempertimbangkan hasil penelaahan awal, identifikasi potensi bahaya, penilaian, pengendalian risiko, dan sumber daya yang dimiliki.
Yang dimaksud dengan “Penelaahan Awal” adalah kegiatan yang
untuk mengetahui kondisi tingkat keselamatan kerja dilakukan pencataatan data baik secara komputasi maupun manual. Salah satu pencatatan yang dilakukan di PSTA-BATAN selain data-data manual yang telah dibukukan adalah papan penampil keselamatan kerja (Safety Board).
Safety board adalah sebuah papan yang digunakan untuk menampilkan
kecelakaan kerja yang ada di suatu instansi tertentu secara garis besar yang terjadi selama kurun waktu yang ditentukan. Fungsi utamanya adalah untuk menginformasikan catatan keselamatan kerja. Umumnya informasi yang terkandung pada safety board berupa tanggal sekarang, tanggal terakhir kecelakaan, jumlah kecelakaan, jumlah hari tanpa kecelakaan, dan sebagainya.
Selama ini jika ingin merubah data yang ada pada safety board PSTA BATAN, harus dilakukan secara manual. Apabila terjadi pergantian tanggal, terjadikecelakaan, dan sebagainya dilakukan dengan menempel kertas pada board tersebut. Sehubungan dengan Kerja Praktek ini, akan dibuat simulasi untuk safety
board tersebut. Dimana safety board akan diubah menjadi digital dengan
pergantian tanggal yang di-update secara otomatis menggunakan GPS (Global
Positioning System). Namun karena merupakan simulasi, GPS yang digunakan
adalah Virtual GPS. Dimana akan dibuat aplikasi sederhana yang akan menjalankan fungsi GPS. Sedangkan untuk meng-update data kecelakaan kerja pada board akan dilakukan oleh operator melalui PC operator.
GMT (Greenwich Mean Time) dan input dari PC operator. Kemudian data-data tersebut disimpan pada memori eeprom internal microcontroller
Rancang Bangun Safety Board berbasis microcontroller ATMega 8 ini adalah proyek yang masih dalam proses pengajuan oleh Adi Abimanyu,et al kepada kepala bidang BK-3. Tujuan proyek ini adalah untuk efektifitas sarana keselamatan yang ada sekaligus memudahkan pemrosesan informasi keselamatan kerja yang ada di PSTA-BATAN.
1.2. Perumusan Masalah
Dari latar belakang, maka dapat dirinci perumusan masalah sebagai berikut :
1. Bagaimana mengirim data GPS dari Virtual GPS menuju
microcontroller.
2. Bagaimana menerima serta mengolah data GPS dari Virtual GPS menuju
microcontroller.
3. Bagaimana mengirim data kecelakaan kerja dari PC operator menuju
microcontroller.
4. Bagaimana menerima serta mengolah data kecelakaa kerja yang dikirim dari PC operator menuju microcontroller.
5. Bagaimana menampilkan data-data yang diolah tersebut pada seven
1.3. Batasan Masalah
Batasan masalah pada pelaksanaan Kerja Praktek adalah sebagai berikut: 1. Perancangan sistem hanya sebatas simulasi dengan Proteus.
2. Modul GPS yang digunakan berupa virtual dengan memanfaatkan komunikasi serial.
1.4. Tujuan Kerja Praktek
Tujuan Kerja Praktek di PSTA BATAN adalah sebagai berikut : 1. Tujuan Umum
a. Memperoleh pengetahuan mengenai manajemen instansi, struktur, organisasi, standar, dan etika kerja di PSTA BATAN.
b. Meningkatkan efektivitas dan efisiensi proses pendidikan dan pelatihan kerja berkualitas.
c. Dapat memecahkan permasalahan pada perusahaan sebagai wujud keterkaitan antara industri dan pendidikan.
2. Tujuan Khusus
Tujuan dari penelitian ini adalah untuk membuat rancangan simulasi Safety Board dengan display seven segment berbasis
microcontroller ATMega8.
1.5 Waktu dan Lama Kerja Praktek
1.6 Ruang Lingkup Kerja Praktek
Sasaran Kerja Praktek adalah agar mahasiswa mendapatkan pengalaman belajar melalui pembuatan simulasi Safety Board,maka dapat dijabarkan ruang lingkup Kerja Praktek adalah sebagai berikut:
1. Pembuatan rangkaian simulasi pada Proteus.
2. Pembuatan main program dengan BASCOM-AVR.
3. Pembuatan program pendukung untuk Virtual GPS dan PC Operator dengan Visual Basic 6.0.
4. Mengkomunikasikan Virtual GPS dan PC Operator menggunakan komunikasi serial.
5. Mengolah data dari Virtual GPS dan PC Operator kemudian menampilkan data olahan ke seven segment.
6. Melakukan kunjungan lapangan.
1.7 Sistematika Laporan
Berikut ini adalah sistematika penulisan laporan hasil Kerja Praktek di PSTA BATAN Yogyakarta :
1. BAB I PENDAHULUAN
Pada bab pendahuluan berisi latar belakang Kerja Praktek, tujuan Kerja Praktek, perumusan masalah, batasan masalah, waktu dan jangka waktu Kerja Praktek, ruang lingkup Kerja Praktek, dan sistematika penulisan.
2. BAB II PROFIL PERUSAHAAN
PSTA BATAN Yogyakarta, pengenalan unit kerja, dan pemahaman proses bisnis yang meliputi visi dan misi perusahaan. 3. BAB III LANDASAN TEORI
Pada BAB III berisi penjelasan tentang ATMega8, GPS, protocol NMEA, seven segment, IC Shift Register 4094 sebagai driverseven
segment, serta komunikasi serial yang digunakan untuk pengiriman
dari PC Operator menuju microcontroller maupun dari Virtual GPS menuju microcontroller.
4. BAB IV DESKRIPSI PEKERJAAN
Pada BAB IV berisi tentang penjelasan proyek, bagaimana
microcontroller berkomunikasi dengan GPS, bagaimana
microcontroller berkomunikasi dengan PC Operator, serta
bagaimana menampilkan data olahan yang dikirim dari GPS maupun PC Operator ke seven segment.
5. BAB V PENUTUP
7 BAB II
PROFIL PERUSAHAAN
2.1 BATAN (Badan Tenaga Nuklir Nasional)
BATAN merupakan Lembaga Pemerintah Non Departemen yang dipimpin oleh seorang kepala, berkedudukan di bawah dan bertanggung jawab kepada Presiden.
2.1.1 Sejarah dan Perkembangan BATAN
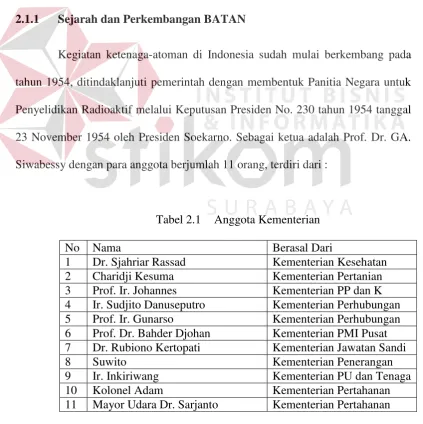
Kegiatan ketenaga-atoman di Indonesia sudah mulai berkembang pada tahun 1954, ditindaklanjuti pemerintah dengan membentuk Panitia Negara untuk Penyelidikan Radioaktif melalui Keputusan Presiden No. 230 tahun 1954 tanggal 23 November 1954 oleh Presiden Soekarno. Sebagai ketua adalah Prof. Dr. GA. Siwabessy dengan para anggota berjumlah 11 orang, terdiri dari :
Tabel 2.1 Anggota Kementerian
No Nama Berasal Dari
1 Dr. Sjahriar Rassad Kementerian Kesehatan 2 Charidji Kesuma Kementerian Pertanian 3 Prof. Ir. Johannes Kementerian PP dan K 4 Ir. Sudjito Danuseputro Kementerian Perhubungan 5 Prof. Ir. Gunarso Kementerian Perhubungan 6 Prof. Dr. Bahder Djohan Kementerian PMI Pusat 7 Dr. Rubiono Kertopati Kementerian Jawatan Sandi
8 Suwito Kementerian Penerangan
Adapun seksi-seksi dalam kepanitiaan itu antara lain :
1. Seksi Penerangan Seksi Fisika, Kimia, dan Teknologi 2. Seksi Efek Biologi dan Perlindungan
3. Seksi Geologi dan Geofisika
Panitia ini bertugas untuk menyelidiki radioaktivinet dan ketenagaatoman, penyelidikan pemakaian tenaga atom srbagai suatu energi baru dalam masa pembangunan, dan memberikan penerangan kepada masyarakat tentang akibat-akibat negatif dan manfaat yang dapat ditimbulkan atau diambil dari tenaga atom.
Pada tahun 1958, setelah panitia tersebut memberikan laporan kepada pemerintah yang dipandang perlu untuk lebih meningkatkan dan mengembangkan kegiatan tenaga atom untuk maksud-maksud damai, maka melalui Peraturan Pemerintah tanggal 5 Desember Tahun 1958 Nomor 65, Pemerintah membentuk Lembaga Tenaga Atom dengan tugas melaksanakan, mengatur, dan mengawasi penyelidikan dan penggunaan tenaga atom di Indonesia demi keselamatan dan kepentingan umum. Mengingat bahwa penggunaan tenaga atom juga berpengaruh pada kehidupan dunia politik internasional, selain LTA juga dibentuk Dewan Tenaga Atom yang berfungsi sebagai Badan Penasehat Presiden dalam memberikan pertinbaangan-pertimbangan dari segi politis strategis dalam merumuskan kebijaksanaan di bidang tenaga atom.
Tenaga Atom Nasional, yang dipimpin oleh seorang Direktur Jenderal dan bertanggung jawab kepada Presiden.
Badan Tenaga Atom Nasional (BATAN) berubah nama menjadi Badan Tenaga Nuklir Nasional (BATAN) berdasarkan Undang Undang Nomor 10 Tahun 1997 tentang Ketenaganukliran (Lembaran Negara Tahun 1997 Nomor 23, Tambahan Lembaran Negara Nomor 3676) dan berdasarkan pada Keputusan Presiden Nomor 110 Tahun 2001 Tentang Susunan Organisasi dan Tugas Lembaga Pemerintah Non-Departemen sebagaimana telah beberapa kali diubah, dan terakhir dengan Peraturan Pemerintah Nomor 12 Tahun 2005, serta Keputusan Presiden Nomor 104/M Tahun 2002.
Dengan memperhatikan Persetujuan Menteri Negara Koordinator Bidang Pengawasan Pembangunan dan Pendayagunaan Aparatur Negara dalam Surat bernomor B/1591/M.PAN/8/2005 tanggal 24 Agustus 2005, maka Kepala BATAN memutuskan untuk mengeluarkan Peraturan Kepala BATAN Nomor 392/KA/XI/2005 tanggal 24 November 2005 Tentang Organisasi dan Tata Kerja Badan Tenaga Nuklir Nasional.
2.1.2 Kedudukan
2.1.3 Tugas dan Fungsi
1 Tugas BATAN
Tugas BATAN adalah menyelenggarakan pemerintahan di bidang penelitian, pengembangan, dan pemanfaatan tenaga nuklir sesuai dengan ketentuan peraturan perundang-undangan yang berlaku.
2. Fungsi BATAN
Dalam melaksanakan tugasnya BATAN menyelenggarakan fungsi :
1. Pengkajian dan penyusunan kebijakan nasional di bidang penelitian, pengembangan, dan pemanfaatan tenaga nuklir.
2. Koordinasi kegiatan fungsional dalam pelaksanaan tugas BATAN.
3. Fasilitasi dan pembinaan terhadap kegiatan instansi pemerintahan di bidang penelitian, pengembangan, dan pemanfaatan tenaga nuklir.
4. Penyelenggaraan pembinaan pelayanan administrasi umum di bidang perencanaan umum, ketatausahaan, organisasi dan tata laksana, kepegawaian, keuangan, kearsipan, hukum persandian, perlengkapan dan rumah tangga.
2.1.4 Wewenang BATAN
Dalam menyelenggarakan tugasnya BATAN memiliki wewenang : 1. Penyusunan rencana nasional secara makro di bidang ketenaganukliran. 2. Perumusan kebijakan di bidang ketenaga nukliran untuk mendukung
3. Kewenangan lain sesuai dengan ketentuanperaturan perundang-undangan yang berlaku yaitu :
a. Perumusan dan pelaksanaan kebijakan dalam program penelitian dasar dan terapan, pengembangan teknologi dan energi nuklir, pengembangan teknologi daur bahan nuklir dan rekayasa serta pendayagunaan hasil penelitian dan pengembangan dan pemasyarakatan ilmu pengetahuan dan teknologi nuklir.
b. Penetapan pedoman ilmu pengetahuan dan teknologi nuklir dan penggunaan tenaga nuklir.
2.1.5 Visi BATAN
Energi nuklir sebagai pemercepat kesejahteraan bangsa.
2.1.6 Misi BATAN
1. Melaksanakan penelitian, pengembangan dan penerapan energi nuklir,
isotop dan radiasi dalam mendukung program pembangunan nasional.
2. Melaksanakan manajemen kelembagaan untuk mendukung kegiatan
penelitian, pengembangan dan penerapan energi nuklir, isotop dan
2.1.7 Prinsip
Segenap kegiatan iptek nuklir dilaksanakan secara profesional untuk
tujuan damai dengan mengutamakan prinsip keselamatan dan keamanan, serta
kelestarian lingkungan.
2.1.8 Nilai–nilai
Segenap kegiatan nuklir dilandasi nilai-nilai :
a. Visionary, Innovative, Excellent dan Accountable
b. Kejujuran, Kedisiplinan, Keterbukaan, Tanggungjawab, Kreatif, dan
Kesetiakawanan
2.1.9 Pedoman
Serta berpegang pada 5 pedoman BATAN yaitu : 1. Berjiwa pioner
2. Bertradisi ilmiah 3. Berorientasi ilmiah
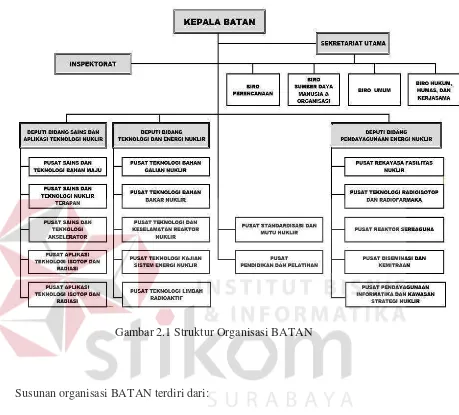
2.1.10 Struktur Organisasi BATAN
Gambar 2.1 Struktur Organisasi BATAN
Susunan organisasi BATAN terdiri dari: 1. Kepala;
2. Sekretariat Utama; a. Biro Perencanaan;
b. Biro Biro Sumber Daya Manusia dan Organisasi; c. Biro Umum;
d. Biro Hukum, Humas. dan Kerjasama
a. Pusat Sains dan Teknologi Bahan Maju; b. Pusat Sains dan Teknologi Akselerator; c. Pusat Sains dan Teknologi Nuklir Terapan;
d. Pusat Teknologi Keselamatan dan Metrologi Radiasi; e. Pusat Aplikasi Isotop dan Radiasi.
4. Deputi Bidang Teknologi Energi Nuklir; a. Pusat Teknologi Bahan Galian Nuklir; b. Pusat Teknologi Bahan Bakar Nuklir;
c. Pusat Teknologi dan Keselamatan Reaktor Nuklir d. Pusat Kajian Sistem Energi Nuklir;
e. Pusat Teknologi Limbah Radioaktif.
5. Deputi Bidang Pendayagunaan Teknologi Nuklir; a. Pusat Rekayasa Fasilitas Nuklir;
b. Pusat Teknologi Radioisotop dan Radiofarmaka; c. Pusat Desiminasi dan Kemitraan,
d. Pusat Reaktor Serbaguna;
e. Pusat Pendayagunaan Informatika dan Kawasan Strategi Nuklir. 6. Inspektorat;
2.1.11 TUJUAN
Tujuan pembangunan iptek nuklir adalah memberikan dukungan nyata dalam pembangunan nasional dengan peran :
1. Meningkatkan hasil litbang energi nuklir, isotop dan radiasi, dan pemanfaatan/pendayagunaanya oleh masyarakat dalam mendukung program pembangunan nasional
2. Meningkatkan kinerja manajemen kelembagaan dan penguatan sistem inovasi dalam rangka mendukung penelitian, pengembangan dan penerapan energi nuklir, isotop dan radiasi.
2.1.12 SASARAN
Sasaran pembangunan iptek nuklir yang ingin dicapai adalah :
1. Peningkatan hasil litbang enisora berupa bibit unggul tanaman pangan, tersedianya insfrastruktur dasar pembangunan PLTN, pemahaman masyarakat terhadap teknologi nuklir, pemanfaatan aplikasi teknologi isotop dan radiasi untuk kesehatan; dan
2.2 Pusat Sains dan Teknologi Akselerator (PSTA)
Pusat Sains dan Teknologi Akselerator adalah salah satu fasilitas yang dimiliki oleh BATAN. Kedudukannya dibawah Deputi Bidang Sains dan Aplikasi Teknologi Nuklir, dan dipimpin oleh seorang Kepala yang bertanggung jawab kepada Deputi Bidang Sains dan Aplikasi Teknologi Nuklir. Dalam melaksanakan tugasnya Kepala PSTA dibantu oleh 5 (enam) orang staf eselon III antara lain seorang Kepala Bagian dan 4 (empat) orang Kepala Bidang, dan 2 (dua) orang Kepala Unit yaitu Kepala Unit Pengamanan dan Kepala Unit Jaminan Mutu.
Gambar 2.3 Logo BATAN
2.2.1 Sejarah dan Perkembangan PSTA-BATAN
Pusat Sains dan Teknologi Akselerator, menurut sejarah awalnya (tahun 1960 sampai dengan Februari 1967), merupakan sebuah proyek kerjasama antara Universitas Gadjah Mada dengan Lembaga Tenaga Atom (sekarang BATAN) dalam bidang penelitian nuklir. Proyek ini diberi nama Proyek GAMA, dan bertempat di Fakultas Ilmu Pasti dan Alam (FIPA) - UGM.
Berdasarkan KEPRES No. 299 tanggal 16 Oktober 1968 di Yogyakarta, pemerintah mendirikan Pusat Penelitian Tenaga Atom Gama (Puslit Gama) dibawah BATAN yang masih bertempat di FIPA UGM. Tanggal 15 Desember 1974 Puslit Gama dipindahkan ke jalan Babarsari dan diresmikan oleh Direktur Jendral BATAN Prof. Ahmad Baiquni, MSc.
telah berhasil menggugah emansipasi kaum wanita Indonesia untuk berperan aktif dalam ikut membangun bangsa dan negara Indonesia.
Berdasarkan KEPRES No. 14 tanggal 20 Februari 1980, dan SK Dirjen BATAN No.31/DJ/13/IV/81 tanggal 13 April 1981, maka Pusat Penelitian Tenaga Atom Gama diubah namanya menjadi Pusat Penelitian Bahan Murni dan Instrumentasi (PPBMI).
Kemudian berdasarkan Keputusan Presiden Nomor 82 tanggal 31 Desember 1985, dan SK Dirjen BATAN Nomor 127/DJ/XII/86 tanggal 10 Desember 1986, Pusat Penelitian Bahan Murni dan Instrumentasi diubah namanya menjadi Pusat Penelitian Nuklir Yogyakarta (PPNY).
Pusat Penelitian Nuklir Yogyakarta (PPNY) berubah nama menjadi Pusat Penelitian dan Pengembangan Teknologi Maju (P3TM). berdasarkan Surat Keputusan Kepala BATAN Nomor 73/KA/IV/1999 tanggal 1 April 1999 tentang Organisasi dan Tata Kerja Badan Tenaga Nuklir Nasional.
Dan berdasarkan Peraturan Kepala BATAN Nomor 392/KA/XI/2005 tanggal 24 November 2005 tentang Organisasi dan Tata Kerja Badan Tenaga NuklirNasional, nama P3TM diubah menjadi Pusat Teknologi Akselerator dan Proses Bahan (PTAPB).
2.2.2 Tugas dan Fungsi PSTA
Pusat Sains dan Teknologi Akselerator mempunyai tugas melaksanakan penelitian dan pengembangan di bidang Fisika Partikel, Teknologi Proses industri nuklir, pelayanan pendayagunaan reaktor riset serta melaksanakan pelayanan pengendalian keselamatan kerja dan pelayanan kesehatan.
Dalam melaksanakan tugasnya Pusat Sains dan Teknologi Akselerator menyelenggarakan fungsi:
1. Pelaksanaan penelitian dan pengembangan di bidang Fisika Partikel;
2. Pelaksanaan penelitian dan pengembangan di bidang Teknologi Proses industri nuklir;
3. Pelaksanaan pelayanan pendayagunaan reaktor riset;
4. Pelaksanaan pengendalian keselamatan kerja dan pelayanan kesehatan; 5. Pelaksanaan urusan tata usaha;
6. Pelaksanaan pengamanan nuklir.
2.2.3 Visi, Misi, Prinsip, dan Nilai 1. Visi PSTA
2. Misi PSTA
1. Melakukan litbang teknologi akselerator untuk meningkatkan nilai tambah sumber daya alam lokal.
2. Melakukan litbang teknologi proses pembuatan partikel terlapis TRISO dan bahan moderator grafit untuk reaktor nuklir bebas pelelehan.
3. Mendayagunakan reaktor Kartini untuk fasilitas pengembangan dan aplikasi teknik analisis nuklir, fasilitas uji instrumentasi nuklir serta fasilitas pelatihan dan penelitian dalam bidang fisika reaktor dan pengendalian reaktor.
3. Prinsip
Prinsip dari PSTA adalah sebagai berikut :
Segenap kegiatan dalam rangka mewujudkan iptek akselerator dan proses bahan untuk peningkatan nilai tambah sumber daya alam lokal dan penyediaan energi berwawasan lingkungan, dilaksanakan secara profesional dengan mengutamakan prinsip keselamatan dan keamanan.
4. Nilai - Nilai yang Berlaku
Nilai-nilai yang berlaku dalam PSTA adalah sebagai berikut :
2.2.4 Fasilitas
Agar pelaksanaan tugas dan fungsi dari PSTA dapat terlaksana dengan baik dan kesejahteraan dari para karyawan dan keluarga karyawan dapat terpenuhi, maka PSTA menyediakan beberapa fasilitas umum antara lain:
a. Setiap karyawan merupakan anggota Askes b. Poliklinik umum
h. Lapangan dan Peralatan Olah Raga (tenis, tenis meja, sepak bola, voli) i. Peralatan musik (gamelan, keroncong, band).
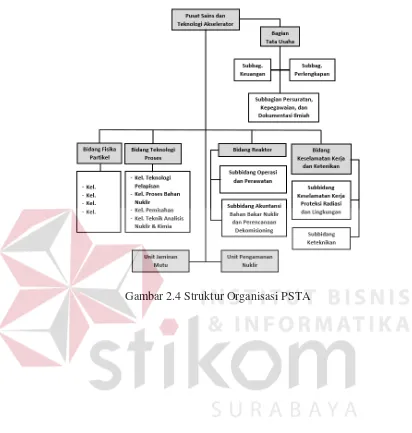
2.2.6 Struktur Organisasi PSTA – BATAN
Pusat Sains dan Teknologi Akselerator terdiri dari : 1. Bagian Tata Usaha
2. Bidang Fisika Partikel 3. Bidang Teknologi Proses 4. Bidang Reaktor
7. Unit Pengamanan Nuklir
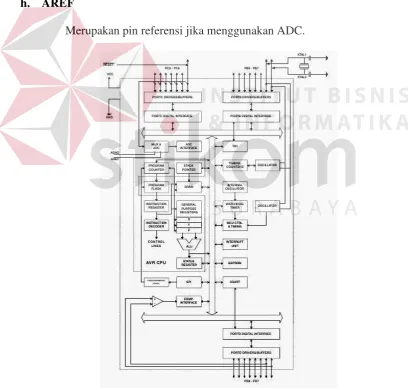
23 3.1 Microcontroller Atmega 8
AVR (Advanced Versatile RISC) merupakan salah satu jenis
microcontroller yang di dalamnya terdapat berbagai macam fungsi.
Perbedaannya pada mikro yang pada umumnya digunakan seperti MCS51 adalah pada AVR tidak perlu menggunakan oscillator eksternal karena di dalamnya sudah terdapat internal oscillator. Selain itu kelebihan dari AVR adalah memiliki Power-On Reset, yaitu tidak perlu ada tombol reset dari luar karena cukup hanya dengan mematikan supply, maka secara otomatis AVR akan melakukan reset. Untuk beberapa jenis AVR terdapat beberapa fungsi khusus seperti ADC, EEPROM sekitar 128 byte sampai dengan 512 byte[2].
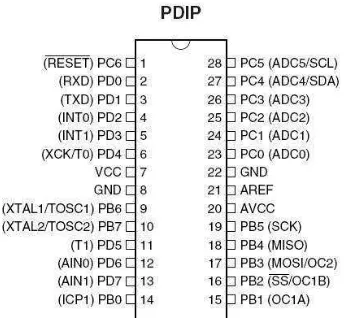
Gambar 3.1 Susunan Pin Microcontroller Atmega 8
Atmega 8 memiliki 28 Pin, yang masing-masing pinnya memiliki fungsi yang berbeda-beda baik sebagai Port maupun fungsi yang lainnya. Berikut akan dijelaskan fungsi dari masing-masing kaki Atmega 8[2].
a. VCC
Merupakan supply tegangan +5V. b. GND
Merupakan supply tegangan 0V. c. Port B (PB7...PB0)
Didalam Port B terdapat XTAL1, XTAL2, TOSC1, TOSC2. Jumlah Port B adalah 8 buah pin, mulai dari pin B.0 sampai dengan B.7. Tiap pin dapat digunakan sebagai input maupun output. Port B merupakan sebuah 8-Bit
bi-directional I/O dengan internal pull-up resistor. Sebagai input, pin-pin yang
terdapat pada Port B external pull-down, akan mengeluarkan tegangan jika pull -up resistor diaktifkan. Khusus PB6 dapat digunakan sebagai input kristal
pada pengaturan FusesBit digunakan untuk memilih sumber clock. Sedangkan untuk PB7 dapat digunakan sebagai output kristal (output oscillator amplifier) tergantung pada pengaturan Fuses Bit yang digunakan untuk memilih sumber clock. Jika sumber clock yang dipilih dari oscillator internal (Syncronous),
Jika RSTDISBL Fuses diprogram, maka PC6 akan berfungsi sebagai pin I/O. Pin ini memiliki karakteristik yang berbeda dengan pin-pin yang terdapat pada Port C lainnya. Namun jika RSTDISBL Fuses tidak diprogram, maka pin ini akan berfungsi sebagai inputreset. Dan jika level tegangan yang masuk ke pin ini rendah (0V) dan pulsa yang ada lebih pendek dari pulsa minimum (1.5 us), maka akan menghasilkan suatu kondisi reset meskipun clock-nya tidak bekerja. f. Port D (PD7…PD0)
Port ini tidak terdapat kegunaan-kegunaan yang lain. Pada Port ini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O. g. AVcc
Pin ini berfungsi sebagai supply tegangan untuk ADC. Pin ini harus dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog saja. Bahkan jika ADC pada AVR tidak digunakan tetap saja disarankan untuk menghubungkannya secara terpisah dengan VCC. Jika ADC digunakan, maka AVcc harus dihubungkan ke VCC melalui lowpassfilter.
h. AREF
Merupakan pin referensi jika menggunakan ADC.
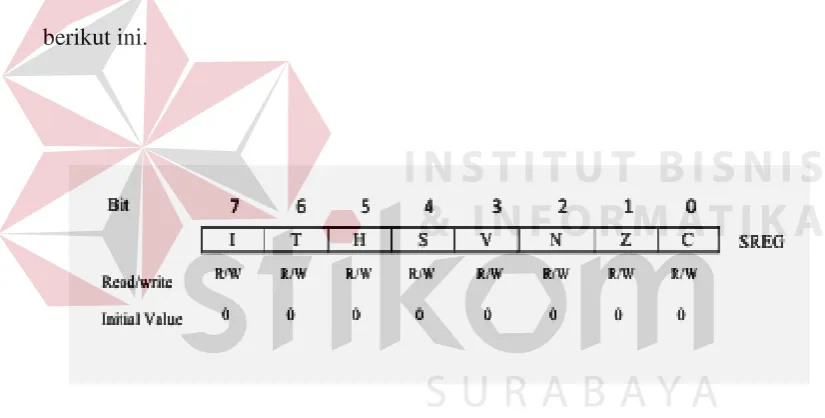
Status Register berisi informasi tentang hasil dari instruksi aritmatika yang terakhir dieksekusi. Informasi ini dapat digunakan untuk mengubah aliran program untuk melakukan operasi kondisional. Register ini di-update setelah semua operasi ALU (Arithmetic Logic Unit) dilakukan, seperti ditentukan dalam
Instruction Set Reference. Hal ini mengurangi penggunaan instruksi
perbandingan, sehingga prosesnya lebih cepat dan lebih terstruktur. Status
Register ini tidak secara otomatis tersimpan ketika menjalankan interupsi dan juga
ketika menjalankan sebuah perintah setelah kembali dari interupsi. Sehingga hal tersebut harus dilakukan melalui software. Status register ada pada Gambar 3.3 berikut ini.
Gambar 3.3 Status Register Atmega 8
i. Bit 7(I)
kembali oleh perintah RETI (Return from interrupt). Bit ini juga dapat di-set dan
di-reset melalui aplikasi dan intruksi SEI (Set Enable Interrupt) dan CLI (Clear
Interrupt). j. Bit 6(T)
Merupakan bit Copy Storage. Instruksi Bit Copy BLD (Bit LoaD) dan BST (BitSTorage) menggunakan T-bit sebagai sumber atau tujuan untuk bit yang telah dioperasikan. Sebuah bit dari sebuah register dalam Register File dapat disalin ke dalam T-bit dengan menggunakan instruksi BST, dan sebuah bit di dalam T-bit ini dapat disalin ke dalam bit di dalam register pada Register File dengan menggunakan perintah BLD.
k. Bit 5(H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatika BCD. l. Bit 4(S)
Merupakan Sign Bit. Bit ini merupakan bit ekslusif atau di antara
Negative Flag (N) dan two’s Complement Overflow Flag (V).
m. Bit 3(V)
Merupakan Bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
n. Bit 2(N)
Merupakan Bit Negative Flag. Bit ini mengindikasikan sebuah hasil
o. Bit 1(Z)
Merupakan Bit Zero Flag. Bit ini mengindikasikan sebuah hasil nol “0” dalam sebuah fungsi aritmatika atau logika.
p. Bit 0(C)
Merupakan Bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa dalam sebuah aritmatika atau logika.
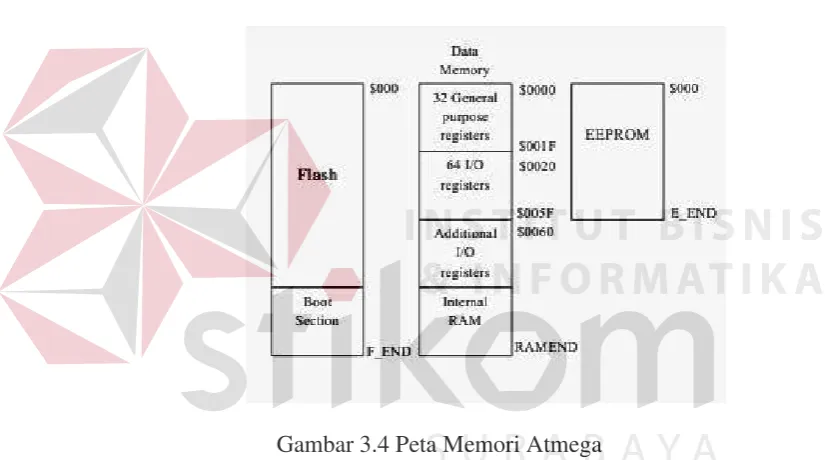
3.1.1 Memori AVR Atmega
Gambar 3.4 Peta Memori Atmega
Memori Atmega terbagi menjadi tiga yaitu[2] :
1. Memori Flash
berada. Bagian boot adalah bagian yang digunakan khusus untuk booting awal yang dapat diprogram untuk menulis bagian aplikasi tanpa melalui
programmer/downloader, misalnya melalui USART (Universal Serial
Asynchronous Receiver Transmitter).
2. Memori Data
Memori data adalah memori RAM yang digunakan untuk keperluan program. Memori data terbagi menjadi empat bagian yaitu, 32 GPR (General
Purpose Register), 64 I/O register, Additional I/O, dan 1024 internal RAM.
GPR adalah register khusus yang bertugas untuk membantu eksekusi program oleh ALU (Arithmatich Logic Unit), dalam instruksi assembler setiap instruksi harus melibatkan GPR. Dalam bahasa C biasanya digunakan untuk variabel global atau nilai balik fungsi dan nilai-nilai yang dapat memperingan kerja ALU. Dalam istilah processor komputer sehari-hari GPR dikenal sebagai
“cache memory”. I/O register dan Aditional I/O register adalah register yang difungsikan khusus untuk mengendalikan berbagai pheripheral dalam
microcontroller seperti pin Port, timer/counter, USART dan lain-lain.
Register ini dalam keluarga microcontroller MCS51 dikenal sebagi SFR
(Special FunctionRegister).
3. EEPROM
3.1.2 Komunikasi Serial Pada Atmega 8
Microcontroller AVR Atmega 8 memiliki Port USART pada pin 2 dan
pin 3 untuk melakukan komunikasi data antara microcontroller dengan
microcontroller ataupun microcontroller dengan komputer. USART dapat
difungsikan sebagai transmisi data sinkron dan asinkron. Sinkron berarti clock yang digunakan antara transmitter dan receiver satu sumber clock. Sedangkan asinkron berarti transmitter dan receiver mempunyai sumber clock sendiri-sendiri. USART terdiri dalam tiga blok yaitu clockgenerator, transmitter, dan receiver[2].
3.1.3 Clock Generator
Clock generator berhubungan dengan kecepatan transfer data (baud
rate), register yang bertugas menentukan baud rate adalah register UBRR
(USART Baud Rate Register) [2].
Tabel 3.1 Baud Rate Atmega 8
Operating Mode Equation for Calculating
Baud Rate
1. Fosc adalah frekuensi oscilator yang digunakan. 2. BAUD adalah transfer Bit per detik.
3.1.4 USART Transmitter
3.1.5 USART Receiver
USART receiver berhubungan dengan penerimaan data dari Pin RX. Perangkat yang sering digunakan adalah register UDR sebagai tempat penampung data yang telah diterima, dan flag RXC sebagai indikator bahwa data telah sukses (complete) diterima[2].
3.2 Global Positioning System(GPS)
GPS (Global Positioning System) adalah sebuah sistem navigasi berbasis satelit yang dibangun dari sebuah jaringan yang terdiri dari 24 satelit yang diletakkan dalam orbit. GPS bekerja pada berbagai kondisi cuaca, di manapun posisi di dunia, dan 24 jam satu hari[1].
Sebuah GPS receiver harus terkunci dengan sinyal dari setidaknya 3 satelit untuk menghitung posisi 2D (latitude dan longitude) dan pergerakan track. Dengan 4 atau lebih satelit, receiver dapat menentukan posisi 3D user (latitude,
longitude, dan altitude). Begitu posisi user sudah ditentukan, unit GPS dapat
menghitung informasi lain, seperti kecepatan, pelacakan, jarak tempuh, jarak tujuan, waktu matahari terbit dan terbenam, dan sebagainya[1].
3.2.1 Protokol NMEA 0183
Protokol NMEA 0183 (National Marine Electronics Association) merupakan suatu badan yang menerbitkan spesifikasi dan mendeskripsikan berbagai perlengkapan navigasi agar dapat berkomunikasi satu sama lain melalui koneksi serial RS-232 atau lainnya (misalnya USB Port). NMEA menggunakan file data ASCII dalam mentransmisikan sistem informasi GPS dari receiver ke
hardware yang berfungsi sebagai input dari posisi secara realtime untuk navigasi.
Salah satu aplikasi protokol ini adalah pada komunikasi data GPS[4]. Parameter yang digunakan oleh protokol ini adalah sebagai berikut[4] :
Baudrate : 4800
Jumlah data : 8 Bit
StopBit : 1
3.2.2 Format Data GPS
Data GPS terdiri dari kalimat teks yang mengandung lintang, bujur, dan informasi lainnya. Setiap kalimat terdiri dari awalan, ditambah satu atau lebih blok data, masing-masing dipisahkan oleh koma[4].
GPS menerima data dari satelit dan mengirimkannya ke bagian output dengan format data yang beragam. Data yang dikirimkan oleh GPS mengacu pada standar NMEA 0183, yaitu standar kalimat laporan yang dikeluarkan oleh GPS
receiver. Standar NMEA memiliki banyak jenis bentuk kalimat laporan
diantaranya koordinat lintang (latitude), bujur (longitude), ketinggian (altitude), waktu sekarang standar UTC (UTC Time) dan kecepatan (speed over ground) [4].
Berikut ini adalah penjelasan mengenai beberapa kalimat yang sering digunakan dalam format NMEA :
1. RMB (Recommended Minimum Navigation Information)
RMB adalah kalimat “rekomendasi navigasi minimum”, dan dikirim
setiap kali sebuah rute atau sebuah goto (seperti misalnya menetapkan tujuan atau
waypoint) diaktifkan.
Beberapa sistem di-set untuk mengirimkan kalimat ini sepanjang waktu, mengirimkan data null jika tidak ada goto yang dipilih, sementara pada sistem lain hanya mengirimkannya saat diperlukan. Format kalimatnya adalah :
$GPRMB,A,x.x,a,c--c,d—
d,llll.ll,e,yyyyy.yy,f,g.g,h.h,i.i,j*kk
Di mana :
RMB : Informasi rekomendasi navigasi minimum A : Status data (A = Active, V = Void)
x.x : Cross-track error (diukur dalam mil laut, nilai
maksimumnya 9.99)
a : Arah kemudi untuk memperbaiki cross-track error (L = Left, R = Right)
yyyyy.yy : Garis bujur (longitude) waypoint tujuan
2. RMC (Recommended Minimum Specific GPS/Transit Data)
Kalimat RMC merupakan data ekuivalen NMEA untuk PVT (Position,
Velocity, Time) yaitu Posisi, Kecepatan, Waktu. Format kalimatnya adalah:
$GPRMC,hhmmss.ss,A,llll.ll,e,yyyyy.yy,f,x.x,y.y,ddmm
yy,z.
z,a*hh
Di mana :
RMC : Recommended Minimum Sentence C
hhmmss.ss :Waktu saat pemosisian, dalam UTC (Universal
x.x : Kecepatan terhadap tanah pantauan (dalam mil laut)
y.y : Sudut penjejakan yang dipantau (dalam derajat) ddmmyy : Tanggal UT (Universal Time)
z.z : Variasi magnetik
a : E (East) atau W (West) untuk variasi magnetik
*hh : Checksum
3. GGA (Global Positioning System Fix Data)
Kalimat GGA menyediakan lokasi 3 dimensi dan data keakuratan.
GGA : Global Positioning System Fix Data
0 = invalid
1 = Pemosisian GPS (SPS) 2 = Pemosisian DGPS
3 = Pemosisian PPS (Precise Positioning Service) 4 = RTK (Real Time Kinematic)
5 = Float RTK
6 = Perkiraan (deadreckoning/perhitungan mati)
7 = Input secara manual
8 = Mode simulasi
bb : Jumlah satelit yang digunakan untuk menjejaki x.x : Kesalahan horizontal (dilusi atau presisi) Kalimat ini menyediakan informasi kecepatan terpantau
$GPVTG,t,T,?,??,s.ss,N,S.SS,K*hh
Di mana :
T : Teks yang sudah pasti (tetap) ini mengindikasikan bahwa penjejakan yang dipantau relatif terhadap utara
? : tidak digunakan ?? : tidak digunakan
s.ss : Kecepatan diatas permukaan tanah (dalam mil laut)
N : Teks yang sudah pasti (tetap) ini mengindikasikan bahwa kecepatan terhadap tanah adalah dalam knot
S.SS : Kecepatan terhadap tanah (dihitung dalam kilometer per jam)
K : Teks yang sudah pasti (tetap) ini mengindikasikan bahwa kecepatan terhadap tanah adalah dalam kilometer per jam *hh : Checksum
5. RMA (Navigation Data from Present Position)
yyyyy.yy : Garis bujur (longitude) waypoint tujuan
zz.z : Variasi magnetik (variasi ke Timur dikurangi dari arah sesungguhnya)
a : E (East) atau W (West) untuk variasi magnetik *hh : Checksum
6. GSA (GPS DoP and Active Satellites)
A : Mode pemosisian
M= Manual (di mana alat penerima dipaksa
untuk bekerja pada 2 dimensi atau 3 dimensi) A = Automatic (otomatis)
3 : Mode pemosisian
yang merupakan indikator kekuatan sinyal. Menurut standar NMEA, range SNR adalah 0 sampai 99 dB, jangkauan yang biasa bekerja pada GPS adalah 25-35 dB. Format kalimat GSV adalah:
$GPGSV,A,B,C,D1,E1,Az1,SNR1,D2,E2,Az2,SNR2,D3,E3,Az3
,SNR3,D4,E4,Az4,SNR4*hh
Di mana :
GSV : Satelite in View
A :Jumlah kalimat yang dibutuhkan untuk menampung data semua SV yang sedang dilihat
B : Nomor kalimat besar nilainya semakin baik sinyalnya
*hh : Checksum
3.3 Seven Segment
Seven segment display adalah indikator penunjuk angka, terdiri dari
tujuh buah LED (Light emitting Diode) yang disusun sehingga menjadi satu komponen. Dibawah ini Gambar 3.6 merupakan gambar output hasil tampilan
seven segment:
Gambar 3.6 Tampilan Seven Segment
Setiap LED pada penampil seven segment diberi kode huruf untuk menyatakan LED mana yang nyala. Kode tersebut adalah a, b, c, d, e, f, g. sebagai contoh apabila yang menyala segmen a, b, g, e, dan d maka yang tampil adalah desimal 2. Berikut ini Gambar 3.7 adalah gambar posisi kode huruf pada penampil
seven segment:
Salah satu fungsi dari seven segment adalah untuk menampilkan sistem bilangan, penampil seven segment terdiri dari dua jenis yaitu common anode dan
common katode. Pada common anode kaki-kaki anodanya terhubung ke ground,
sebaliknya pada common katode kaki-kaki katodanya terhubung ke VCC.
3.4 IC Shift Register 4094
IC 4094 adalah IC shift register 8 bit yang memiliki register latch untuk setiap bit yang berguna untuk memindahkan data dari saluran serial kesaluran paralel dengan pergeseren bit Q0 sampai bit Q7 menuju output. Output paralel dapat dihubungkan langsung dengan jalur data umum. Data digeser ketika terjadi perubahan sinyal clock dari Low ke High, selanjutnya data digeser dari register geser ke register penyimpanan, kemudian dengan memberikan logika high pada pin OE akan menggeser data dari register penyimpanan menuju register output[5].
Tabel 3.3 Keterangan Pin IC 4094
3.4.1 Cara Kerja Shift Register 4094
Data masuk secara serial melalui pin D (1). Pada IC Shift Register ini data masuk baru disimpan setelah terjadi clock. Jadi cara memasukkan data pada
shiftregister ini adalah strobe harus berlogika high. Kemudian data masuk-clock
-data masuk-clock- data masuk-clock, begitu seterusnya. Setelah satu blok data dikirim, strobe harus dibuat berlogika low untuk mengakhiri pengiriman. Pin OE atau Output Enable digunakan untuk mengaktifkan output serial maupun output paralel. Logika 1 untuk enable dan logika 0 untuk disable. Q0 - Q7 adalah output paralel dari shift register ini sedangkan QS dan QS̅̅̅̅ adalah output serial dari shift
register ini. Jika menggunakan lebih dari satu IC ShiftRegister maka pin data dari
IC Shift Register selanjutnya dihubungkan ke output serial dari IC Shift Register
Gambar 3.9 Timing Diagram IC Shift Register 4094
3.5 Bahasa BASIC
Bahasa BASIC adalah salah satu bahasa tingkat tinggi (High Level
Language) yang berorientasi ke pemecahan masalah (problem solving). BASIC
yang merupakan singkatan dari Beginner’s All purpose Symbolic Instruction Code, ditemukan oleh John G. Kemeny, profesor dari Darthmouth College dan Thomas E. Kurtz pada tahun 1960. Perintah-perintah dalam bahasa BASIC relatif mudah dipahami, baik oleh orang yang awam sekalipun[7].
Banyak sekali jenis compiler dari versi bahasa BASIC yang ada di pasaran, semisal : BASICA, GWBASIC, MBASIC, Turbo BASIC, Quick BASIC, Power BASIC, dll, akan tetapi pada dasarnya kesemuanya bermuara pada style pemrograman yang sama yaitu bahasa BASIC itu sendiri[7].
macam alternatif perintah perulangan. Bahasa BASIC yang sudah terstruktur, semisal TURBO BASIC dan Quick BASIC[7].
Saat ini perkembangan bahasa BASIC sudah sedemikian pesatnya, sehingga terdapat software BASIC yang dapat dijalankan pada platformWindows dan pemrograman berorientasi obyek (Object Oriented Programming) seperti VISUAL BASIC[7].
3.6 BASCOM-AVR
BASCOM-AVR adalah salah satu software pemrograman
microcontroller yang menggunakan bahasa Basic. Selain pemahaman bahasanya
yang mudah, compiler BASCOM-AVR juga dilengkapi dengan simulator. Sehingga mempermudah proses pemrograman[6].
3.7 Visual Basic 6.0
Visual Basic merupakan bahasa pemrograman yang sangat mudah dipelajari, dengan teknik pemrograman visual yang memungkinkan penggunanya untuk berkreasi lebih baik dalam menghasilkan suatu program aplikasi. Ini terlihat dari dasar pembuatan dalamVisual Basic adalah form, dimana pengguna dapat mengatur tampilan form kemudian dijalankan dalam script yang sangat mudah[8].
Ledakan pemakaian Visual Basic ditandai dengan kemampuan Visual
Basic untuk dapat berinteraksi dengan aplikasi lain di dalam sistem operasi
Windows dengan komponen ActiveX Control. Dengan komponen ini
yang ada di dalam sistem operasi Windows. Hal ini juga ditunjang dengan teknik pemrograman di dalam Visual Basic yang mengadopsi dua macam jenis pemrograman yaitu Pemrograman Visual dan Object Oriented Programming (OOP) [8].
Gambar 3.10 Interface Visual Basic 6.0
Visual Basic 6.0 sebetulnya perkembangan dari versi sebelumnya dengan beberapa penambahan komponen yang sedang tren saat ini, seperti kemampuan pemrograman internet dengan DHTML (Dynamic Hyper Text Mar Language), dan beberapa penambahan fitur database dan multimedia yang semakin baik[8].
3.8 Proteus ISIS Schematic Capture
skematik desain rangkaian dengan program ARES untuk membuat layout PCB dari skematik yang kita buat[9].
Gambar 3.11 Tampilan Awal Proteus
Fitur-fitur Proteus adalah :
a. Memiliki kemampuan untuk mensimulasikan hasil rancangan baik digital maupun analog maupun gabungan keduanya
b. Memiliki fitur yang cukup lengkap dan mudah dipelajari
c. Dapat mensimulasikan berbagai jenis microcontroller seperti AVR, PIC, 8051 series, dan microcontroller lainnya.
d. Memiliki model-model peripheral yang interactive seperti LED, tampilan LCD, RS232, dan berbagai jenis library lainnya,
e. Menyediakan instrument-instrument virtual seperti voltmeter, ammeter,
oscciloscope, logicanalyser, dll,
f. Memiliki kemampuan menampilkan berbagi jenis analisis secara grafis seperti transient, frekuensi, noise, distorsi, AC dan DC, dll.
h. Bersifat open architecture sehingga kita bisa memasukkan program seperti C++ untuk keperluan simulasi,
53 4.1 Proses Kerja Safety Board
Papan Penampil Keselamatan Kerja atau Safety Board adalah sebuah papan yang digunakan untuk menampilkan data-data terkait informasi keselamatan kerja. Adapun informasi yang dicatat diantaranya adalah :
1. Tanggal (dd-mm-yyyy) : Dimana datanya diperoleh dari GPS dengan memperhatikan jam sebagai pengganti hari. Dikarenakan format waktu yang dikirim oleh GPS adalah GMT (Greenwich Mean Time), maka data dari GPS harus diolah agar sesuai dengan format waktu Indonesia (WIB) yaitu GMT+7. Pengambilan data dilakukan setiap pukul 07.00 WIB, dimana data jam pada GPS adalah 00.00 GMT serta tanggal bertambah (ganti hari). 2. Tanpa Kecelakaan Kerja : yang dimaksud tanpa kecelakaan kerja adalah
jumlah hari tanpa kecelakaan kerja. Jika pada hari tersebut tidak terjadi kecelakaan dan tanggal sudah bertambah, maka nilai tanpa kecelakaan kerja juga bertambah 1. Namun jika pada hari itu terjadi kecelakaan kerja, maka nilai tanpa kecelakaan kerja akan di-reset sehingga kembali nol.
4. Hampir Celaka (Near Miss) : dilakukan pencatatan juga untuk kondisi hampir celaka. Dalam hal ini hampir celaka adalah kecelakaan kecil seperti terkena solder, teriris pisau atau kecelakaan kecil lainnya, yang berarti bukan kecelakaan namun mendekati kecelakaan.
5. Kecelakaan Terakhir (Last accident) : mencacat tanggal terakhir terjadinya kecelakaan. Kecelakaan dapat berupa kulit terbakar radiasi, tersiram bahan kimia, atau bahkan mungkin meninggal.
Gambar 4.1 Papan Keselamatan Kerja (Safety Board)
Microcontroller Atmega 8 sebagai pemroses utama, mendapatkan
masukan data dari GPS dan PC operator. Data yang dikirim dari GPS berupa blok data dengan berbagai tipe data NMEA. Data tersebut akan diolah oleh
microcontroller, kemudian tanggal dan jam dari data tersebut disimpan dan
hari ini. Jika dalam satu hari tidak terjadi kecelakaan, kemudian tanggal telah bertambah, maka nilai tanpa kecelakaan kerja akan bertambah secara otomatis dan ditampilkan pada seven segment sebagai tanpa kecelakaan kerja. Sedangkan dari
PC Operator dapat mengirimkan tanggal kecelakaan terakhir serta hampir celaka.
4.2 Perancangan Rangkaian Simulasi
Gambar 4.3 Blok Diagram Perancangan Rangkaian Simulasi Safety Board
Dalam perancangan rangkaian simulasi, dibutuhkan beberapa komponen agar sistem dapat berjalan sesuai yang diinginkan. Diantaranya adalah :
1. Microcontroller Atmega 8 : berfungsi sebagai pemroses utama, dimana akan
mengolah data dari GPS maupun PC Operator.
2. GPS dan Protokol NMEA 0183 : digunakan sebagai penyedia data tanggal yang akan ditampilkan pada seven segment sebagai tanggal hari ini,
3. Compim : compim merupakan wujud virtual dari DB-9 yang digunakan sebagai komponen komunikasi serial antara GPS dengan mikro, maupun PC
Operator dengan mikro.
5. IC Shift Register 4094: digunakan sebagai decoder seven segment, dimana mendapatkan masukan serial dari mikro dan menghasilkan keluaran pararel yang ditampilkan pada seven segment.
4.2.1 Microcontroller Atmega 8
Microcontroller Atmega 8 adalah microcontroller keluarga AVR 8 bit.
Atmega 8 memiliki ukuran flash memori sebesar 8KB, SRAM sebesar 1KB, dan memori EEPROM sebesar 512 Bytes. Atmega 8 memiliki 3 buah PORT utama yaitu PORTB, PORTC, dan PORTD dengan total pin input/output sebanyak 23 pin. Dalam sistem ini, Atmega digunakan sebagai kendali utama dari seluruh sistem. Dimana akan memproses 2 blok data, diantaranya adalah data dari GPS dan data dari PC Operator.
4.2.2 GPS (Global Positioning System) dan Protokol NMEA 0183
GPS dalam sistem ini digunakan sebagai penyedia data tanggal dan jam. Format data GPS mengikuti standar NMEA (National Marine Electronics
Association), standar ini mengijinkan peralatan elektronik untuk mengirim
informasi kepada komputer atau peralatan yang lain. Tipe data ini terdiri dari PVT
(position, velocity, time) yang dikirimkan oleh GPS transmitter melalui
Dari beberapa jenis data yang dikirm oleh GPS, yang akan diolah dalam sistem ini adalah format data RMC.
Berikut contoh format RMC :
$GPRMC,123519,A,4807.038,N,01131.000,E,022.4,084.4,2303 94,003.1,W*6A
Dimana :
RMC Recommended Minimum sentence C
123519 Fix taken at 12:35:19 UTC A Status A=active or V=Void. 4807.038,N Latitude 48 deg 07.038' N 01131.000,E Longitude 11 deg 31.000' E 022.4 Speed over the ground in knots 084.4 Track angle in degrees True 230394 Date - 23rd of March 1994 003.1,W Magnetic Variation
*6A The checksum data, always begins with *
4.2.3 Compim
Compim adalah sebuah komponen yang disediakan Proteus untuk dapat mengkomunikasikan mikro dengan PC secara serial. Compim juga merupakan wujud virtual dari sebuah DB-9.
1. Komunikasi Antara Virtual GPS dengan Mikrokontroler Atmega 8 Pada simulasi ini, GPS yang digunakan berupa virtual. Yaitu dengan membuat sebuah program dari Visual Basic yang mengirimkan blok data berformat NMEA menuju mikro secara serial.
Untuk dapat mengkomunikasikan virtual GPS dengan mikro, maka ada beberapa hal yang perlu diperhatikan. Diantaranya adalah :
1. Dikarenakan pada simulasi ini mikro hanya sebagai penerima data, maka kaki Rx (Receiver) pada compim dihubungkan dengan PORTD.4 pada mikro. Sehingga tidak perlu menghubungkan kaki Tx pada compim dengan mikro. PORTD.4 adalah port biasa yang dijadikan virtual com, dimana PORTD.4 akan menjalankan fungsi yang sama seperti fungsi Rx pada mikro. Cara menjadikannya menjadi virtual com hanya dengan menyambungkan kaki Rx pada COMPIM dengan PORTD.4.
2. Pengaturan Baud Rate pada COMPIM harus sesuai dengan Baud Rate pada mikro, agar data yang dikirim GPS bisa diterima dan terbaca oleh mikro. 3. Pastikan telah menghubungkan COM yang akan dipakai oleh GPS dan mikro.
Disini, kami menggunakan aplikasi VSPE untuk menghubungkannya. VSPE adalah software simulasi port serial yang memungkinkan kita membuat port serial virtual dan menghubungkannya tanpa menggunakan kabel serial.
2. Komunikasi Antara PC Operator dengan Mikrokontroler Atmega 8
Hal-hal yang perlu diperhatikan dalam mengkomunikasikan mikro dengan PC Operator sama dengan komunikasi antara mikro dengan GPS diatas. Namun pada komunikai ini tidak menggunakan virtual com sebagai Rx, karena mikro memiliki port Rx sebagai penerima dalam komunikasi serial.
3. 7 Segment Display
7 Segment Display digunakan untuk menampilkan data-data yang akan
diinformasikan. Dalam sistem ini ada 26 buah 7 Segment, diantaranya untuk menampilkan tanggal pada hari tersebut sebanyak 8 digit, jumlah hari tanpa kecelakaan sebanyak 4 digit, jumlah hari kecelakaan kerja sebanyak 4 digit, jumlah hari hampir celaka sebanyak 2 digit, dan tanggal kecelakaan terakhir sebanyak 8 digit.
4. IC Shift Register 4094
IC Shift Register 4094 disini digunakan untuk memasukkan data secara
serial dan mengeluarkan data secara paralel atau biasa disebut Serial Input
Gambar 4.6 Rangkaian seven segment dan IC 4094
Pada gambar 4.5, ditunjukkan data masuk secara serial melalui pin D pada IC 4094. Pada IC Shift Register ini, data yang masuk akan disimpan setelah terjadi clock. Jadi cara memasukkan data pada shift register ini adalah strobe harus berlogika high. Kemudian data masuk-clock-data masuk-clock- data
masuk-clock, begitu seterusnya. Setelah satu blok data dikirim, strobe harus dibuat
berlogika low untuk mengakhiri pengiriman. Pin OE atau Output Enable digunakan untuk mengaktifkan output serial maupun output paralel. Logika 1 untuk enable dan logika 0 untuk disable. Q0 - Q7 adalah output paralel dari shift
register ini sedangkan QS dan QS̅̅̅̅ adalah output serial dari shiftregister ini. Jika
Gambar 4.7 Timing Diagram IC Shift Register 4094
4.3 Perancangan Program
4.3.1 Program Utama pada Microcontroller
Gambar 4.8 Diagram Alir MainProgram
Inisialisasi1 Inisialisasi2
Gambar 4.11 Diagram Alir Gambar 4.12 Diagram Alir
4.3.2 Program Pendukung
1. Program untuk PC Operator
Gambar 4.15 Tampilan Program untuk PC Operator
Program untuk PC Operator berisi 3 perintah untuk mengontrol Safety
Board. Diantaranya adalah tanggal terakhir kecelakaan, hampir celaka, dan reset
tanpa kecelakaan kerja. Perintah yang dikirim dari PC Operator berisi header, nilai perintah, dan penutup. Berikut ini contoh format pengiriman data dari PC
Operator :
N1# N : Header untuk mengatur nilai hampir celaka
1 : Jumlah yang akan dikirim untuk nilai hampir celaka # : Penutup yang menandakan akhir pengiriman data
L010112# L : Header untuk mengatur tanggal kecelakaan terakhir
R0# R : Header untuk reset nilai tanpa kecelakaan kerja 0 : nilai reset untuk tanpa kecelakaan kerja
# : Penutup yang menandakan akhir pengiriman data
2. Program untuk Virtual GPS
Gambar 4.16 Tampilan Program untuk Virtual GPS
71 5.1 Kesimpulan
Kesimpulan yang di dapat selama Kerja Praktek di PSTA – BATAN Yogyakarta adalah:
1. Microcontroller dapat diimplementasikan pada banyak bidang salah
satunya bidang keselamatan kerja, yakni untuk memudahkan penyampaian informasi keselamatan kerja.
2. Dapat melakukan simulasi pengiriman serial dari virtual GPS menuju
microcontroller maupun dari PC Operator menuju microcontroller.
3. Microcontroller dapat menerima dan mengolah data yang dikirim dari
virtual GPS maupun dari PC Operator.
4. Microcontroller dapat menampilkan data yang diinformasikan melalui
seven segment.
5.2 Saran
72
Alde, A., Lange, D., Kadam, P. (2011). GPS-Global Positioning System & its Applications. International Journal of Functional and Logical
Programming. 2011 (1): 01
[2]Atmel. 2013. 8-bit Atmel with 8Kbytes In-System Programmable Flash. (Online). (www.atmel.com/images/atmel-2486-8-bit-avr-microcontroller-atmega8_l_datasheet.pdf) diakses pada tanggal 5 Agustus 2014.
[3]Budiawan, Tiyo. (2011). MOBILE TRACKING GPS (GLOBAL POSITIONING
SYSTEM) MELALUI MEDIA SMS (SHORT MESSAGE SERVICE).
(Online). (http://eprints.undip.ac.id/25228/1/ML2F004518.pdf) diakses pada tanggal 7 Agustus 2014.
[4]Feri, Moch. Suandi. 2013. Rancang bangun penentu arah kiblat portable
berbasis mikrokontroler. (Online). (elib.unikom.ac.id/download.php
?id=203196).Diakses pada tanggal 10 Agustus 2014.
[5]NXP (2013). HEF4094B 8-Stage Shift-and-Store Register (Datasheet). www.nxp.com/documents/data_sheet/HEF4094B.pdf, 25 Agustus 2014
.
[6]Sanjaya, Taufik Adi. 2003. Pengenalan Mikrokontroler AVR, Bascom AVR dan
Khazama Downloader. (Online).
[7]Syarif Iwan. 2010.
Diktat Kuliah Bahasa Komputer I. (Online).
(http://lecturer.eepis-its.edu/~iwanarif/basic2.pdf). Diakses pada tanggal 11 Agustus 2014.
[8]Taufiq, Arif Johar. Mengenal Visual Basic. http://arifjt.staf.ump.ac.id/ Bahan_Kuliah/VB 6/Bab_.pdf, Diakses pada tanggal 12 Agustus 2014. [9]Yogyakarta, Universitas Negeri. 2011.
Labsheet Praktikum Mikrokontroler.