BAB II
TEORI DASAR
2.1 Teori Dasar Metode VLF
Secara teoritis, dasar metode VLF menggunakan teori perambatan gelombang elektromagnetik dari persamaan Maxwell dalam bentuk hubungan vektor medan listrik dan medan magnetik, yaitu:
B E t ∂ ∇ × = − ∂ (2.1) D H J t ∂ ∇ × = + ∂ (2.2)
Dimana E adalah medan listrik (V/m), B adalah induksi magnetik (Wb/m2), t adalah waktu (detik), H adalah medan magnetik (A/m), J adalah rapat arus listrik (A/m2) dan D adalah pergeseran listrik (C/m).
Persamaan (2.1) mempunyai arti fisis bahwa medan listrik timbul akibat medan magnetik yang berubah sebagai fungsi waktu. Sedangkan persamaan (2.2) menunjukkan bahwa medan magnetik yang terjadi dalam suatu ruang ditimbulkan oleh aliran arus, serta medan magnetik berbanding lurus dengan arus listrik totalnya.
Bila dalam medium homogen isotrop dimana B=μH , D=εE, dan J =σE, maka persamaan (2.1) dan (2.2) dapat disederhanakan menjadi:
H E t μ⎛∂ ⎞ ∇ × = − ⎜ ∂ ⎟ ⎝ ⎠ (2.3) E H E t σ ε⎛∂ ⎞ ∇ × = + ⎜ ⎟ ∂ ⎝ ⎠ (2.4) Dimana μadalah permeabilitas magnetik (H/m), ε adalah permitivitas (F/m), σ adalah konduktivitas (ohm/meter), dan ω adalah frekuensi sudut medan.
Dengan menggunakan operasi curl pada persamaan (2.3) dan (2.4) serta vektor identitas ∇ × ∇( xA)= ∇ ∇( iA)− ∇2A, akan didapatkan:
(
)
2 2 2 E E E H t t μ⎛ ⎞∂ σμ⎛∂ ⎞ εμ⎛ ⎞ ∇ = ⎜ ⎟ ∇ × = ⎜ ⎟+ ⎜ ∂ ∂ ⎝ ⎠ ⎝ ⎠ ⎝ t ∂ ⎟ ∂ ⎠ (2.5)(
)
(
)
2 2 2 H H H E E t t σ ε⎛ ⎞∂ σμ⎛∂ ⎞ εμ⎛ ∇ = ∇ × − ⎜ ⎟ ∇ × = ⎜ ⎟+ ⎜ ∂ ∂ ⎝ ⎠ ⎝ ⎠ ⎝ t ⎞ ∂ ⎟ ∂ ⎠ (2.6)Apabila fungsi waktunya dipilih sebagai fungsi sinusoidal dengan
2 f
ω= π , maka persamaan (2.5) dan (2.6) dapat disederhanakan menjadi:
2 E iωμσE ω εμ2 E ∇ = − (2.7) 2 H iωμσH ω εμ2 H ∇ = − (2.8)
Persamaan (2.7) dan (2.8) adalah persamaan gelombang elektromagnetik untuk perambatan vektor medan listrik dan magnetik di dalam medium homogen isotropik yang memiliki konduktivitas σ , permeabilitas μ dan permitivitas ε.
Jika gelombang elektromagnetik melewati benda konduktif berkonduktivitas rendah, maka:
2 2
E ω εμE
∇ ≈ − , ∇2H ≈ −ω εμ2 H (2.9) Dan apabila gelombang elektromagnetik melewati benda konduktif berkonduktivitas tinggi, maka:
2 E E i E t μσ ∂ ωμ ∇ ≈ ≈ ∂ σ , 2 H H i H t μσ ∂ ≈ ωμσ ∂ ∇ ≈ (2.10)
Untuk menyelesaikan pesamaan (2.10), diasumsikan bahwa gelombang elektromagnetik merambat pada sumbu z, sehingga,
0
( , ) i t mz y
H z t =H eω+ (2.11)
dengan H0 merupakan kuat medan magnet primer, dan 2 m =iωμσ atau: (1 ) (1 ) 2 m= ± +i ωμσ = ± +i a (2.12) dengan 2
a= ωμσ . KarenaH harus terdefinisi pada z= +∞, sehingga,
(1 ) ( )
0 0
i t j az az i t az y
atau
0 cos( )
az y
H =H e− ωt−az (2.14)
Persamaan (2.14) merupakan persamaaan gelombang elektromagnetik pada bidang z (sumbu vertikal).
2.2 Prinsip Dasar Metode VLF
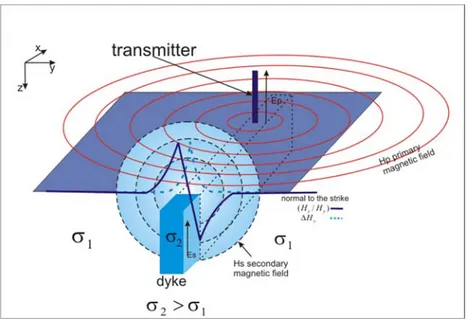
Medan elektromagnetik primer sebuah pemancar radio, memiliki komponen medan listrik vertikalEPz dan komponen medan magnetik horizontal
Py
H tegak lurus terhadap arah perambatan sumbu x. Medan elektromagnetik yang dipancarkan antena pemancar selanjutnya akan diterima stasiun penerima dalam empat macam perambatan gelombang, yaitu: gelombang langit, gelombang langsung, gelombang pantul dan gelombang terperangkap. Yang paling sering ditemui pada daerah survey adalah gelombang langit.
Pada jarak yang cukup jauh dari antena pemancar, komponen medan elektromagnetik primer dapat dianggap sebagai gelombang yang berjalan secara horizontal. Jika di bawah permukaan terdapat suatu medium yang konduktif, maka komponen medan magnetik dari gelombang elektromagnetik primer akan menginduksi medium tersebut sehingga akan menimbulkan arus induksi (Eddy Current), ESx.
Arus Eddy akan menimbulkan medan elektromagnetik baru yang disebut medan elektromagnetik sekunder, HS, yang mempunyai komponen horizontal dan komponen vertikal. Medan magnetik ini mempunyai bagian yang sefase (in-phase) dan berbeda fase (out-of-(in-phase) dengan medan primer. Adapun besar medan elektromagnetik sekunder sangat tergantung dari sifat konduktivitas benda di bawah permukaan.
Gambar 2.1 Distribusi medan elektromagnetik untuk metode VLF dalam polarisasi listrik dengan sinyal di atas sebuah dike konduktif vertikal (diambil dan digambar ulang dari Bosch dan Muler, 2001)
2.2.1 Metode Very Low Frequency-Electromagnetic (VLF-EM)
Gelombang EM yang terdeteksi oleh antena penerima merupakan nilai medan magnetik total HR dari medan primer HP yang langsung menjalar melalui udara ataupun yang dipantulkan oleh ionosfer bumi, dan medan sekunder
S
H hasil induksi elektromagnetik pada konduktor, dimana HP >HS. Sehingga besar HS dan HR bergantung pada ruang, waktu dan frekuensi. Dikarenakan kondisi medan jauh, besar Hp tidak tergantung terhadap ruang. Respon EM yang terukur pada penerima akan memiliki beda fase yang berbeda antara medan primer dan medan sekunder, secara matematis dapat ditulis:
) (ω ϕ ω + − = + = t i S t i P R S P R e H e H H H H H (2.15)
dengan frekuensi pemancar f =
(
ω/2π)
dan pergesaran fase (ϕ) antara komponen medan magnetik primer dan sekunder. Informasi ini dapat diolah untuk menentukan ukuran dan nilai konduktivitas dari suatu konduktor yang terdapat dibawah permukaan bumi.Adapun ungkapan dalam bentuk vektor, komponen-komponen medan magnetik mempunyai bentuk :
⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ + ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ = ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ Sz Sy Py Rz Ry H H H H H 0 0 0 0 (2.16)
Hasil dari pengukuran metode VLF–EM adalah inphase dan quadrature yang merupakan rasio dari HRz/HRy dan merefleksikan perubahan distribusi resistivitas di bawah permukaan
2.2.2 Metode Very Low Frequency-Electromagnetic-vertical Gradient (VLF-EM-vGRAD)
Dikarenakan medannya yang terletak jauh, medan magnetik primer tidak tergantung terhadap ketinggian z:
) (z f
HPy ≠ (2.17) Sehingga medan magnetik primer menghasilkan perbedaan komponen medan magnetik resultan horizontal HRy pada 2 ketinggian yang berbeda:
ΔHRy =HRy(z2)−HRy(z1) (2.18)
dengan HRy(z1)<HRy(z2) ketika z1<z2
Melalui persamaan 2.16 kita peroleh:
) ( ) ( )) ( ( )) ( ( 1 2 1 2 z H z H H z H H z H H H Sy Sy Ry Sy Py Sy Py Ry − = Δ + − + = Δ (2.19)
Berdasarkan persamaan (2.19) kita mengetahui bahwa ΔHRy hanya ditentukan oleh medan magnetik sekunder yang disebabkan oleh benda konduktif di bawah permukaan.
2.3 Fase dan Polarisasi Ellips
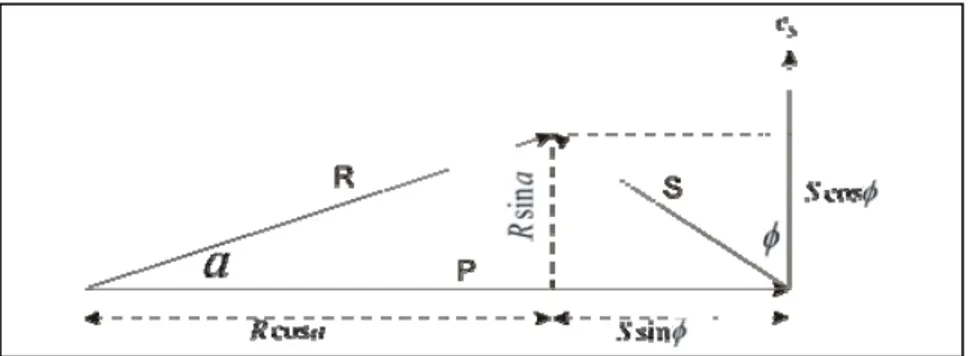
Pada saat gelombang primer masuk kedalam medium, gaya gerak listrik (ggl) es, akan muncul dengan frekuensi yang sama, tetapi fasenya tertinggal 900 Gambar 2.2 menunjukkan diagram vektor antara medan primer P dan ggl induksinya.
Gambar 2.2 Hubungan amplitudo dan fase gelombang sekunder S dan gelombang primer P (Kaikonen, 1979).
Andaikan Z = +R i Lω adalah impedansi efektif sebuah konduktor dengan tahanan R dan induktans L, maka arus induksi (Eddy current) akan menjalar dalam medium dan menghasilkan medan sekunder S. Medan S tersebut memiliki fase yang tertingal sebesar φ yang besarnya tergantung dari sifat kelistrikan medium:
tanφ ω= L R/ (2.20)
Total beda fase antara medan P dan S akan menjadi 900 + tanφ ω= L R/ .
Berdasarkan hal ini dapat dikatakan bahwa, jika terdapat medium yang sangat konduktif, maka beda fasenya akan mendekati 1800 , dan jika medium sangat resistif, maka beda fasenya mendekati 900.
Kombinasi antara P dan S akan membentuk resultan R. Komponen R yang sefase dengan komponen P (Rcosα) disebut sebagai komponen real (in-phase) dan komponen yang tegak lurus P (Rsinα) disebut sebagai komponen imajiner (out-of phase/quadrature). Perbandingan antara komponen real dan imajiner dinyatakan dalam persamaan:
Re
tan /
Im = φ ω= L R (2.21) Persamaan di atas menunjukkan bahwa jika semakin besar perbandingan Re/Im, semakin besar sudut fasenya, maka konduktor tersebut semakin baik, dan sebaliknya jika semakin kecil perbandingan Re/Im, semakin kecil sudut fasenya, maka konduktor tersebut semakin buruk.
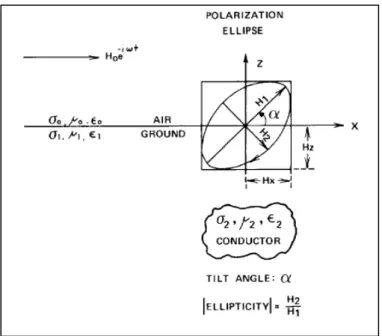
Gambar 2.3 Polarisasi ellips akibat kehadiran benda konduktif pada bidang medan electromagnetic (Sacit,1981)
Jika medan magnet horizontal adalah Hx dan medan magnetik vertikalnya
adalah Hz, maka besarnya sudut tilt dapat ditunjukkan seperti pada Gambar 2.3,
yang besarnya sebagai berikut :
1 2 2( / ) cos 1/ 2 tan 1 ( / ) z x z x H H H H φ α = ± − ⎡ Δ ⎤ ⎢ − ⎥ ⎣ ⎦x100% (2.22) dan ellipsitasnya diberikan sebagai:
2 1 H H ε = atau:
2 1 sin 100% ( ) z x H H H φ ε = Δ × (2.23) dan z x φ φ φ Δ = −
dimana Hz dan Hx adalah resultan komponen medan horizontal, H1 dan H2 adalah sumbu mayor dan minor dari polasarisasi elips, dan φz dan φx adalah fase komponen medan magnetik horizontal dan vertikal.
Pada penelitian ini data yang terukur pada alat VLF adalah : inphase, quadrature, tilt-angle dan total-field. Kontras anomali yang terukur dapat disebabkan oleh adanya batuan terisi air yang lebih konduktif atau adanya batuan berongga terisi udara yang lebih resistif dari lingkungan kars. Dengan parameter tersebut diharapkan anomali akibat aliran sungai bawah permukaan dapat diperlihatkan dengan jelas.
2.4 Gangguan Terhadap Sinyal VLF
Sumber gangguan utama pada proses pengukuran VLF adalah adanya radiasi medan elektromagnetik akibat kilat baik ditempat yang dekat maupun di tempat yang jauh dari daerah pengukuran. Pada frekuensi VLF, radiasi medan ini dapat melemahkan sinyal yang dipancarkan oleh pemancar. Gangguan ini dicirikan dengan naiknya kuat medan listrik vertikal dan medan horizontal secara tiba tiba.
Gangguan kedua adalah variasi harian medan elektromagnetik bumi, dimana terjadi pergerakan badai dari arah timur ke barat yang terjadi pada siang hingga sore hari menjelang malam. Untuk daerah sekitar Australia, gangguan minimum terjadi pada bulan Mei-Juli, dan gangguan maksimum terjadi pada jam 08.00 waktu lokal, kemudian merambat naik hingga maksimum pada jam 16.00 waktu lokal (McNeill, 1991).
2.5 Tahapan Pengolahan Data VLF
Agar data VLF lebih mudah diinterpretasi, data lapangan hasil pengukuran harus diolah terlebih dahulu. Pada pengukuran metode VLF, topogarafi dan gangguan (noise) di lapangan dapat mempengaruhi nilai VLF yang terukur. Sehingga diperlukan koreksi agar data yang diolah dapat benar-benar menggambarkan anomali akibat benda konduktif di lapangan.
2.5.1 Koreksi Topografi
Pengukuran VLF pada penelitian ini dilakukan pada daerah kars Gunung Sewu, Gunung Kidul yang memiliki topografi relatif bervariasi. Topografi tersebut dicirikan oleh puluhan ribu bukit batu gamping berketinggian antara 20-50 meter yang didominasi oleh bangun kerucut. Puncak kerucut bisa membulat atau lancip, tergantung keadaan stratigrafinya.
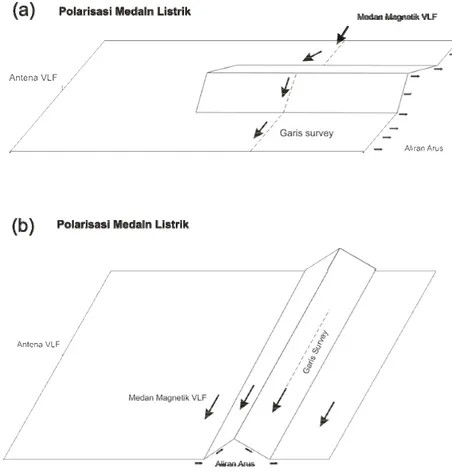
Jika topografi daerah penyelidikan tidak datar, maka ada 2 hal yang mempengaruhi hasil pengukuran data VLF:
1. Pada bidang miring medan sekunder akan sejajar dengan bidang miring tersebut, sedangkan medan primer akan tetap horizontal. Akibatnya resultan kedua medan tersebut akan mengikuti kemiringan topografi (Baker dan Myers, 1980).
2. Peristiwa pemantulan medan primer oleh bidang miring, pantulan ini akan bersuperposisi dengan medan primer semula.
Efek topografi tersebut diperlihatkan pada Gambar 2.4.
Pada penelitian ini data VLF dikoreksi topografi dengan cara Baker dan Myers. Koreksi ini berdasarkan studi model laboratorium, yaitu dengan meletakan posisi benda konduktif pada kemiringan topografi yang bervariasi, pengaruh topogarafi berbanding lurus terhadap kemiringannya. Sehingga hubungan antara kemiringan dengan besarnya koreksi topografi dapat diperlihatkan pada Gambar 2.5.
Gambar 2.4 Efek topografi pada aliran arus VLF dan medan magnetik: (a) Polarisasi medan listrik , (b) Polarisasi medan magnetik (McNeil dan Labson, 1987)
Gambar 2.5 Hubungan antara kemiringan lereng dengan besarnya koreksi topografi (Baker dan Myers, 1980)
Adapun prosedur koreksi tofografi dari Baker dan Myers tersebut adalah sebagai berikut: komponen real dan imajiner hasil pembacaan dirata-ratakan dan hasilnya diletakan pada posisi tengahnya. Kemudian koreksi topografi yang sesuai dengan kemiringannya ditambahkan pada hasil perata-rataan sebelumnya. Secara matematis dituilis sebagai berikut :
TC R R R = + )± 2 % % ( 1 2 ) 2 , 1 ( (2.24)
dimana: R1 adalah pembacaan data VLF pada stasiun 1 (%)
R2 adalah pembacaan data VLF pada stasiun 2 (%)
TC (topograhic correction) adalah koreksi topografi(%)
2.5.2 Filter Moving Average
Metode filter moving average digunakan untuk memisahkan data yang mengandung frekuensi tinggi dan rendah. Data yang mengandung frekuensi tinggi diasumsikan sebagai sinyal, sedangkan data berfrekuensi rendah diasumsikan sebagai gangguan (noise). Metode ini dilakukan dengan cara merata-ratakan nilai anomalinya dibagi dengan jumlah jendela yang digunakan. Atau secara matematis dapat ditulis sebagai berikut:
^ 1 i k i i j i k y N + = − =
∑
y (2.25) dengan 1 2 N k = − ,dimana: k adalah jumlah pengurangan data yang hilang akibat dilakukan filtering dan N adalah panjang interval smoothing atau lebar jendela.
2.5.3 Filter Fraser
Titik dimana tilt-angle mengalami persilangan dari polaritas positif menjadi negatif diinterpreatasi sebagai posisi konduktor yang menyebabkan anomali. Dalam satu profil, persilangan ini terlihat cukup jelas, namun ketika diplot kedalam bentuk peta, letak dari semua titik nol (inflection point) tidak dapat
dengan menggunakan filter yang ditemukan oleh Fraser (1969) yang dinamakan filter Fraser. Filter ini didesain untuk membagi data tilt angle dengan 900, sehingga persilangan menjadi maksimum (peak). Filter ini juga melemahkan panjang gelombang yang terlalu besar untuk mengurangi efek topografi. Selain itu, filter ini mengurangi efek pelemahan dari variasi temporal kuat sinyal pemancar.
Prinsip dasar dari filter Fraser adalah menggunakan 4 buah titik yang berurutan, dengan cara mengurangkan jumlah dari nilai data ke-3 dan ke-4 terhadap jumlah dari nilai data ke-1 dan ke-2. Kemudian diplot pada titik tengah antara data ke-2 dan data ke-3. Atau secara matematis filter Fraser dapat dilakukan sebagai berikut:
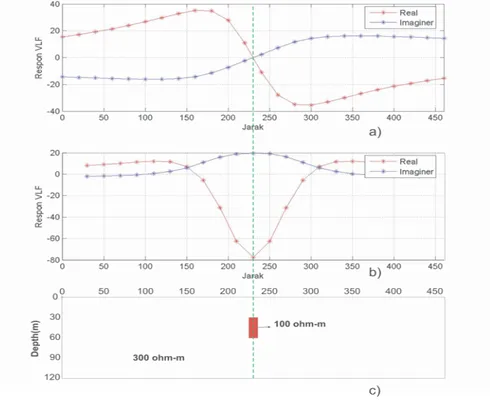
) ( ) ( +2 + +3 − + +1 = n n n n n M M M M F (2.26) Contoh penerapan filter Fraser dapat dilihat pada Gambar 2.6.
Gambar 2.6 Respon pengukuran dari model sintetik dengan mengaplikasian filter Fraser. Titik-titik hijau memperlihatkan posisi benda pada sumbu–x, untuk : a) Data sintetik VLF-EM, terdiri dari data real (merah) dan imaginer (biru), b) Data terfilter Fraser dan (c) Model benda resistivitas dengan harga 100 ohm-m.
2.5.4 Filter Karous-Hjelt
Filter Karous-Hjelt merupakan filter yang dikembangkan dari konsep medan magnetik yang berhubungan dengan aliran arus listrik. Filter ini dikembangkan dari filter statistika linear berdasarkan atas filter Fraser dan teori medan linear dari Bendat dan Piersol. Filter ini menghasilkan profil kedalaman dari rapat arus yang diturunkan dari nilai komponen vertikal medan magnetik pada setiap titik pengukuran. Adapun profil kedalaman dapat dihitung dengan menggunakan persamaan: 3 n 2 n 1 n 1 -n 2 -n 3 -n n -0.102M 0.059M -0.561M 0.561M -0.059M 0.102M KH = + + + + + + (2.27)
Dimana Mn = Hz / Hx adalah nilai yang terukur pada alat.
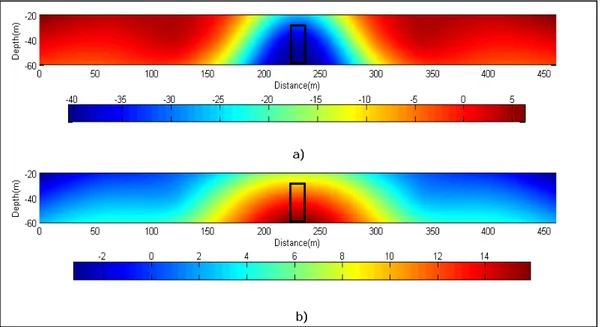
Filter Karous-Hjelt menghitung sumber arus akivalen pada kedalaman tertentu yang umumnya dikenal sebagai rapat arus. Posisi rapat arus ini dapat menjadi alat untuk menginterpreatasi lebar dan kemiringan sebuah benda anomali dengan kedalaman tertentu. Contoh penerapan filter Karous-Hjelt dapat dilihat pada Gambar 2.7.
Gambar 2.7 Rapat arus ekivalen yang dihitung dengan
menggunakan filter Karous-Hjelt: (a) inphase dan (b) quadrature. Kotak bergaris hitam adalah posisi benda anomali sebenarnya.
2.6 Pemodelan
Pemodelan ke depan (forward modelling) dan ke belakang (inverse modelling) adalah adalah proses yang saling berkebalikan satu sama lain. Pemodelan ke depan menggambarkan respon penyebaran gelombang dari model yang kita buat. Pemodelan ke belakang mencoba mengembalikan pengaruh dari perambatan gelombang untuk menghasilkan suatu gambaran bawah permukaan bumi.
Pada penelitian ini baik pemodelan ke depan, maupun pemodelan ke belakang dilakukan dengan algoritma elemen hingga (finite element). Finite elemen adalah suatu cara untuk menyusun solusi pendekatan dari masalah nilai batas. Ide dasarnya adalah memperoleh solusi pendekatan suatu masalah yang kompleks dengan mengubahnya menjadi masalah yang sederhana terlebih dahulu. Dengan ide ini dimungkinkan untuk melakukan perubahan bentuk persamaan model dari bentuk persamaan differensial ke bentuk persamaan linear, dengan kata lain mengubah suatu masalah dengan derajat kebebasan tak hinggga menjadi masalah yang memiliki derajat kebebasan berhingga (Burhan, 2005).
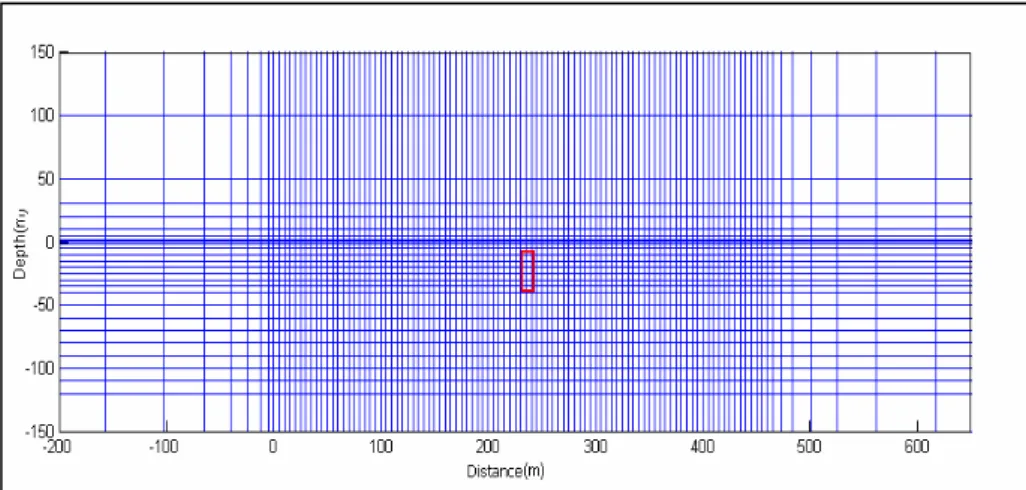
Pada metode finite elemen, daerah pengamatan dibentuk menjadi sebuah matriks yang dibagi menjadi elemen-elemen berbentuk kotak. Oleh karena itu nilai spasi pada arah vertikal dan horisontal dan pembagian blok dari zona interest harus ditetapkan (Gambar 2.8). Pada daerah yang memiliki perubahan konduktivitas dilakukan diskretisasi yang tinggi karena disekitar daerah ini terjadi variasi nilai medan yang besar.
Gambar 2.8 Mesh finite elemen (garis biru ) untuk pengukuran dari 0-460. Pada daerah konduktif (kotak bergaris merah) dilakukan pendiskretisasian yang lebih rapat karena disekitar ini terjadi variasi nilai medan yang besar.
2.6.1 Pemodelan ke Depan
Untuk menggambarkan gelombang bidang, difusi dan medan elektromagnetik harmonik, dapat diungkapkan dengan menggunakan persamaan Maxwell : 2 2 2 2 2 2 y y y E E i E x z ωμσ ∂ ∂ + = ∂ ∂ (2.28) 1 y 1 y y H H i E x σ x z σ z ωμσ ∂ ∂ ⎛ ⎞ ⎛ ⎞ ∂ ∂ + = ⎜ ⎟ ⎜ ⎟ ∂ ⎝ ∂ ⎠ ∂ ⎝ ∂ ⎠ (2.29) dimana: Ey adalah komponen y dari medan listrik dan Hy adalah komponen y
dari medan magnetik yang menunjukkan arah srike, sedangkan i, ω, μ, dan σ secara berurutan adalah frekuensi angular, permeabilitas magnetik, dan konduktivitas listrik. Untuk menyelesaikan medan yang tak diketahui syarat batas ketidakhomegenan Dirichlet diaplikasikan untuk menetapkan nilai medan layer horisontal half space terhadap nilai batas.
Penentuan komponen medan Hx, Hz untuk polarisasi medan listrik (polarisasi-E) , Ex dan Ez untuk polarisasi medan magnetik (polarisasi-H) dapat ditentukkan dengan:
1 y x E H iωμ z ∂ = ∂ , dan 1 y z E H iωμ x ∂ = − ∂ (2.30 1 y x H E z σ ∂ = − ∂ , dan 1 y x H E x σ ∂ = ∂ (2.31) Nilai resistivitas semu ρa dan fase φ untuk polarisasi-E dan polarisasi-H dapat dihitung dengan menggunakan rumus:
2 1 y a x E H ρ ωμ = , 1 ( / ) tan ( / ) y x y x imag E H real E H φ = − ⎛ ⎞ ⎜⎜ ⎝ ⎠⎟⎟ (2.32) 2 1 x a y E H ρ ωμ = , 1 ( / ) tan ( / ) x y x y imag E H real E H φ = − ⎛ ⎞ ⎜⎜ ⎝ ⎠⎟⎟ (2.33) Bagian real dan imaginer dari fungsi transfer magnetik pada VLF dapat dihitung dengan rumus: Re z 100% x H real H ⎛ ⎞ = ⎜ ⎟⋅ ⎝ ⎠ (2.34) Im z 100% x H imag H ⎛ ⎞ = ⎜ ⎟⋅ ⎝ ⎠ (2.35) 2.6.2 Pemodelan ke Belakang
Pemodelan ke belakang pada penelitian ini dilakukan dengan metode damped least-squares dengan tujuan untuk meminimalkan fungsi, dengan menggunakan rumus:
(
) (
)
(
02)
T T
d S p d S p p p p
ψ = Δ − Δ Δ − Δ +λ Δ Δ − (2.36) dimanaΔd adalah dobs−dcal menerangkan ketidakcocokan antara data observasi dan data yang dihitung, sedangkan S dan p secara berurutan menunjukkan sensitivitas matriks dan parameter model yang diperbaharui. Parameter Langrange
λ dimasukan untuk menentukan parameter model yang diperbaharui terhadap jumlah batas p0. Turunan parsial ∂ψ /∂Δpj dikehendaki menjadi nol untuk
semua sell model j agar memperoleh fungsi minimum dari ψ. Hasil persamaan normalnya adalah :
(
T)
S S+λI Δ =p STΔd (2.37) dimana I adalah matriks identitas. Persamaan ini diselesaikan dengan cara mengaplikasikan penyelesaian langsung untuk setiap tahap iterasi kedalam persamaan 2.28 dan 2.32. Untuk mendapatkan penyelesaian yang cepat, parameter Langrange diturunkan menjadi lebih kecil dengan faktor yang lebih kecil dari 1.
Error root mean square χ2 dapat dihitung dengan persamaan :
2 1 1 n i i RMS d n = =
∑
Δ (2.38) 2 2 2 1 1 n i i i d n χ ε = Δ =∑
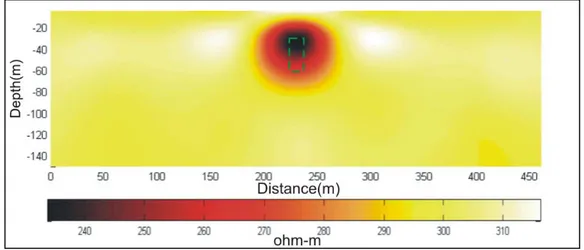
(2.39) dimana εi adalah standar deviasi dan n adalah jumlah data. Iterasi akan dihentikan jika memenuhi kriteria-kriteria berikut: (1) Iterasi mencapai jumlah yang kita tetapkan (2) ketika error RMS tidak mengalami perubahan. Gambar 2.9 memperlihatkan contoh hasil pemodelan ke belakang dari akibat benda konduktif.2.6.3 Perhitungan Sensitivitas
Element Sij dari matriks sensivitas S untuk pengamatan ke-i dan
parameter model ke-j dihitung menggunakan metode persamaan sensitivitas, untuk perhitungan pemodelan.
(
)
1(
(
)
)
ln i i ij T T i i j K M a b S K M a u b u σ u − ⎛ ∂ + ⎞ ⎛ ⎞ ⎜ =⎜ − ⎟ + − ⎜ ∂ ⎝ ⎠ ⎝ ⎠⎟⎟ (2.40)dimana aidan bi adalah vektor kolom untuk menghitung medan listrik dan medan magnetik dalam kasus Polarisasi-E dan H-polasisasi untuk datum ke–i dari u. Nilai ai dibentuk dari penyederhanaan yang bernilai 1 pada posisi datum ke 1
dan 0 untuk node yang lainnya. Jika observasi tidak diletakan secara tepat pada node grid , maka nilai medan diinterpolasi berdasarkan 2 node terdekatnya.
Gambar 2.9 Model resistivitas yang diperoleh dengan pemodelan ke belakang dari model sintetik. Kotak bergaris hijau adalah model yang digunakan untuk menghasilkan data sintetik.
Dalam melakukan pemodelan hendaknya parameter yang dimasukan disesuaikan dengan kondisi real lapangan, karena adakalanya hasil yang diperoleh dari pemodelan secara analitik memiliki error yang kecil, tetapi tidak sesuai dengan keadaan geologi sebenarnya, sehingga diperlukan data pendukung lainnya untuk memasukan parameter yang cocok.