I.
PENDAHULUAN
1.1. Latar Belakang
Nilai kecepatan dan arah angin di suatu tempat pada heberapa ketinggian tertentu bisa didapatkan dari hasil observasi pilot balon atau radiosonde. Salah satu peralatan obsewasi pilot balon adalah teodolit, yaitu sebuah instrumen yang digunakan untuk mengukur sudi~t horizontal atau sudnt vertikal suatu objek pengamatan, instrumen ini berupa teropong yang berotasi pada suatu mekanik dengan sistem gytnbal
dua aksis. Salah satu aksis mewakili sudut elevasi (sudut vertikal) dan aksis yang lain mewakili sudut azimut (sudut horizontal) dari posisi objek yang diamati melalui teropong. Nilai sudut elevasi dan azimut pada berbagai nilai ketinggian yang diperoleh dari masing-masing aksis tersebut diturunkan menjadi nilai kecapatan dan arah angin.
Pada teodolit optik pemhacaan nilai sudut elevasi dan azimut dilakukan secara manual dengan cara membaca jarum yang menunjuk pada skala busur sudut. Dalam perkembangan teknologi instrumentasi telah dibuat teodolit digital yang memiliki tampilan LCD (Liquid Crystal Display). Pada tampilan tersebut nilai sudut elevasi dan azimut dapat dibaca dalam bentuk digital. Hal ini memberikan kemudahan dan
mengurangi kemungkinan kesalahan
pembacaan dan pencatatan oleh pengamat. Kekeliruan pencatatan dapat memberikan pengaruh besar terhadap analisa lebih lanjut. Dengan mengembangkan sistem kerja instrumen teodolit yang dapat melakukan pembacaan dan pencatatan secara otomatis, ha1 ini memberikan kemudahan kepada pengamat sekaligus niengurangi dampak kesalahan oleh pengamat. Dalam penelitian ini akan dilakukan pembuatan teodolit elektronik dengan memanfaatkan komponen perangkat rnouse sebagai sensor posisi 3 0 . Dan menyimpan hasil pembacaan sensor dengan menghubungkan instrumen tersebut dengan perangkat komputer. Selain itu dilakukan pe~nbuatan perangkat lunak yang dapat mengambil data yai~g dikirim oleh sensor pada perangkat komputer. Kemudian perangkat lunak melakukan pengolahan data posisi sudut menjadi data arah dan kecepatan
1.2.
Tujuan
Tujuan dari penelitian ini adalah membuat teodolit elektronik dengan memanfaatkan komponen perangkat keras
rnozcse sehagai sensor posisi 3D. Dan membuat perangkat lunak pada perangkat komputer sebagai antarmuka pengamatan pilot balon.
11.
TINJAUAN PUSTAKA
2.1.
Pengamatan
Pilot
Balon
Pengamatan pilot balon diciptakan untuk tujuan pengukuran arah dan kecepatan angin pada ketinggian yang beragam. Pengamatan ini dilakukan dengan mengikuti kenaikan dan posisi sebuah balon karet dengan menggunakan teodolit balon. Balon tersebut diisi oleh gas hidrogen atau helium &an naik dengan kecepatan konstan yang diinginkan atau berdasarkan ketentuan baku. Besar kecepatan vertikal balon telah ditentukan dengan mengukur jumlah gas yang diisi kedalam balon. Massa balon yang ringan dan ukuran balon yang telah ditentukan membuat balon dapat digerakan oleh angin dan pergerakan tersebut mewakili kecepatan dan arah angin pada ketinggian balon. Sudut azimul dan elevasi yang dibentuk antara stasiun pibal dan balon diamati dan dicatat pada interval waktu tertentu. Penganiatan ini banyak dilakukan pada bidang meteorology, penerbangan, dan militer seperti pada gambar I.
angin yang ditampilkan dalam berbagai Gambar I . 0bscrv;lsi Pilot Dalon
1
antarmuka seperti tabel, grafik ZD, dan (sumbcr: l~tlp://~vww.pilotbaII~~~.~o~nIpib~Ipub.l~tnt) ISudut elevasi menunjukkan ketinggian sudut balon yang berkisar antara
0" sejajar permukaan horizontal pengamat hingga 90' kearah atas pengamat. Sudut azimut menggambarkan posisi sudut horizontal balon yang berkisar antara O0
hingga 360'. Nilai 0' atau 360"
menunjukkan arah utara, 90' menunjukkan arah timur, 180" menunjukkan arah selatan,
270' menunjukkan arah barat. Sudut dicatat berdasarkan interval waktu tertenlu. Dan waktu pencatatan dapat menghasilkan nilai ketinggian balon. Dengan demikian dapat dibuat rekonstruksi proyeksi harizontal balon yang menghasilkan arah dan kecepatan angin pada setiap tingkatan ketinggian.
2.1.1. Komponen Petiga~natan
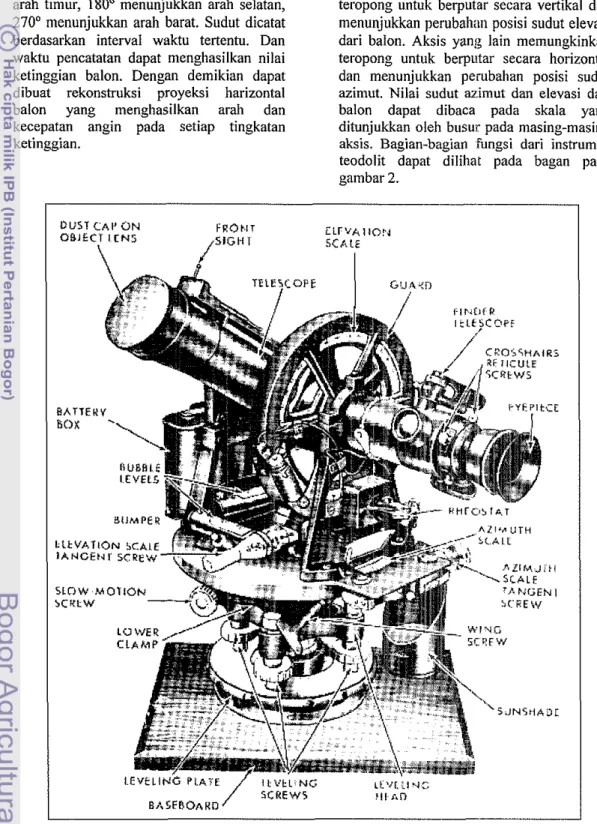
Salah satu komponen penting observasi pilot bslon adalah Teodolit. Instrumen ini berupa teropong yang dilengkapi derigan mekanisme sistem gv~nbal dua aksis yang memungkinkan teropong tersebut tlapat berputar tiga dimensi. Salah satu aksis memungkinkan teropong untuk berputar secara vertikal dan menunjukkan perubahao posisi sudut elevasi dari balon. Aksis yang lain memungkinkan teropong untuk berputar secara horizontal dan menunjukkan pemhahan posisi sudut azimut. Nilai sudut azimut dan elevasi dari balon dapat dibaca pada skala yang ditunjukkan oleh busur pada masing-masing aksis. Bagian-bagian fungsi dari instrumen teodolit dapat dilihat pada bagan pada gambar 2.
CirYAll0l.l SCALE
I
/
SCREWS III r.nB A S E ~ O A K D
Gambar 2. Bagan Teodolit
Komponen yang berfungsi (hidrogen atau helium) seliingga dapat ~newakili pergerakan angin adalah balon membubung dengan kecepatan tertentu. pilot. Dalam pengamatan udara atas, balon Terdapat beberapa sesifikasi balon yang yang digunakan merupakan lapisan tipis digunakan untuk observasi pilot balon. Pada berbentuk bola (spherical) yang terbuat dari perusahaan NovaLynx spesifikasi yang bahan karet alami ataupun sintetik. Balon ini tersedia dapat dilihat pada tabel 1.
diisi oleh gas yang lebih ringan dari udara
I
Pilot BatloonsKetebalan lapisan balon relatif sangat tipis, sehingga menjadi sangat rentan. Memar atau goresan kecil akan menimbulkan penurunan ketinggian maksimum yang dapat dicapai balon sebelum meledak atau pecab. Secara umum terdapat 4 macam ukuran balon, yaitu 10,20,30, dan 100 gram. Balon dengan ukuran 30 dan 100 gram digunakan untuk kepentingan militer dan pengamatan
cuaca. Balon ukuran 10 gram memiliki laju kenaikan dan tinggi maksimum yang lebih rendah. Biasanya digunakan untuk pengamatan ketinggia~~ a w n . Sedangkan balon ukuran 30 dan LOO gram selain laju kenaikan dan tinggi maksimum yang lebih tinggi juga lebili mnudali untuk diamati. Balon ukuran 30 Fan1 dapat digunakan untuk pengamatan hingga ketinggian 4600 m
(15000 feet) dan balon hilang pada ketinggian yang lebih besar. Sedangkan balon ukuran 100 gram dapat digunakan untuk pengamatan lebih dari 4600 m.
Agar dapat dengan mudab diamati oleh teropong balon ini memiliki beberapa warna yang bervariasi, yaitu merah dan hitam. Sedangkan warna natural atau putih digunakan pada observasi radiosonde.
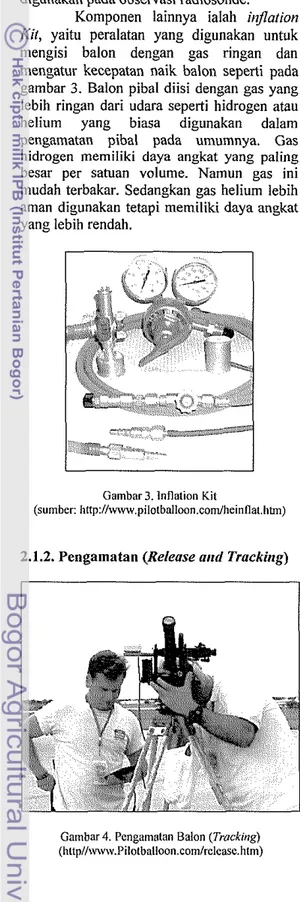
Komponen lainnya ialah itflation Kil, yaitu peralatan yang digunakan untuk mengisi balon dengan gas ringan dan mengatur kecepatan naik balon seperti pada gambar 3. Balon pibal diisi dengan gas yang lebih ringan dari udara seperti hidrogen atau helium yang biasa digunakan dalam pengamatan pibal pada umumnya. Gas hidrogen memiliki daya angkat yang paling besar per satuan volume. Namun gas ini mudah terbakar. Sedangkan gas helium lebih aman digunakan tetapi memiliki daya angkat yang lebih rendah.
Gambar 3. Inflation Kit
(sumber: I~lip:llr~vw.pilotbnllwn.comiheinflat,l~m)
2.1.2. Pengamatan (Release and Tracking)
Cantbar 4. Pcn~amatas Balon (Tracking) (l~ltp//wmw.PilolbaIloon.comlr~I~~c.hlm)
Instrumen teotlolit pada pengamatan pilot balon dipersiapkan dan diatur untuk menghadap arah utara sebagai titik no1 derajat sudut azimut. Balon yang telah disiapkan dilepaskan didepan teodolit. Pengamat melakukan trucking balon dengan cara mengikuti pergerakan dan posisi balon dengan menggunakan teodolit. Posisi rotasi teropong yaitu azimut dan elevasi dicatat dalam selang waktu tertentu. Selang waktu pengamatan pada ketentuan baku adalah setiap satu menit sekali.
2.1.3. Perhitungan Arah dan Kecepatan Angin
Arah dan kecepatan angin dapat diturunkan dari nilai sttdut azimut (Az) dan elevasi (El) dari posisi balon, waktu pada setiap titik pengamatan, ketinggian balon (h), dan kecepatan naik balon. Kecepatan dan arah angin dihitung berdasarkan posisi balon pada satu titik waktu penganiatan terhadap posisi balon pada satu titik waktu pengamatan sebelumnya, bukan terhadap titik awal pengamatan.
Posisi balon yang direkam dalam posisi sudut dengan komponen azitnut dan elevasi dapat dikonversi kedalam posisi sistem koordinat tiga dirnensi. Sistem koordinat dengan tiga su~nbu x.y, dan z, diniana sumbu x adalal~ sumbu yang sejajar dengan arah mata angin timur-barat, sutnbu y adalah sumbu yang sejajar dengan arah mata angin utara-selatan, dnn sumbu z adalah su~nbu untuk perpind;~han secara vertikal yang tegak lurus permukaan bumi pada titik no1 pengamatan. Kecepatau dan arah angin diliitung setelah menentukan jarak perpindahan posisi balon pada proyeksi horizontal
d"
=h.
.
CotgEl,,
(sumber. BhIG 2004)
Kel : d,, = jarak perpindahan horizontal
ke-n
h. = ketinggian balon ke-n El, = Sudut Elevasi ke-n
Setelah itu dihitung perpindahan posisi balon pada komponen utara-selatan yaitu Ay dan komponen timur-barat yaitu As.
yn =
d
,,
Cos Az,,
x,
=
d,,SinAz,,
h = x , -X,+,
Kc1 : y,, = posisi terhadap U-S
x. = posisi terhadap T-B Ay = perpindahan U-S
Ar = perpindahan T-B Az, = Sudut Azimut ke-n
masing aksis. Jarum pada bt~sur skala menunjukkan posisi rotasi teropong yang merupakan posisi sudui balon pibal. Dengan menggunakan teodolit optik seperti pada ga~nbar 5 pengamatan dilakukan dengan pembacaan dan pencatatan secara manual. Menentukan kecepatan angin (ff) dengan
membagi jarak perpindahan posisi balon dengan selang waktu pengamatan (t) seperti pada persamaan berikut:
t
(suniber: BMG 2004) Kc1 : ff = kecepatan angin
Ay = perpindahan U-S Ax = perpindahan T-B
t = selang waktu pengamatan dan arah angin (dd) pada persamaan berikut:
a
=arctan-
(surnber: BMG 2004) Ket : Ay = perpindalian U-S
Ax = perpindahan T-B
a = arah perpindahan balon dalam konvensi meteorologi arah angin merupakan arah dari mana angin tersebut berhembus. Angin yang berhembus dari arah utara diberi nilai 0" dan angin yang berhembus dari selatan diberi nilai 180°. Sedangkail angin yang berhembus dari timur diberi nilai 90' dan angin yang berhembus dari barat diberi nilai 270'. Dengan delnikian jika: a ) A x = + ; A y = + ; m a k a d d = 9 0 - a b ) A x = + ; Ay=-; m a k a d d = 9 0 + a c ) A x = - ; Ay=-; m a k a d d = 2 7 0 - a d ) A x = - ; A y = + ; r n a k a d d = 2 7 0 + u (sumber: BMG 2004) Ket : dd = arall angin
2.2.
Teodolit Optik dan Digital
Gmnbnr 5 . Teodolit Oplik
Pembacaan sudut azilnut dan sudut elevasi pada teodolit digital dilakukan secara elektronik. Instrumen ini menggunakan
rototy encoder, yaitu perangkat
elekhomekanik yang dapat merubab posisi sudut dari suatu aksis ltedalam kode analog ataupun kode digital. Alat ini dapat dijumpai pada kontrol-kontrol mekanik dan robotik pada suatu indusbi. Beberapa produk encoder
yang ada di pasaran dapat dilihat pada gambar 6 , 7 dao 8.
Ga~nbar 6 . Absolute Rotary Encoder
(su~nbcr:l~ttp://en.~vik~pe~Iii~.ors/~viki/
Rotary-encoder.html) Teodolit optik memiliki dua buah
I I Gambar 7. ShaR Encoder
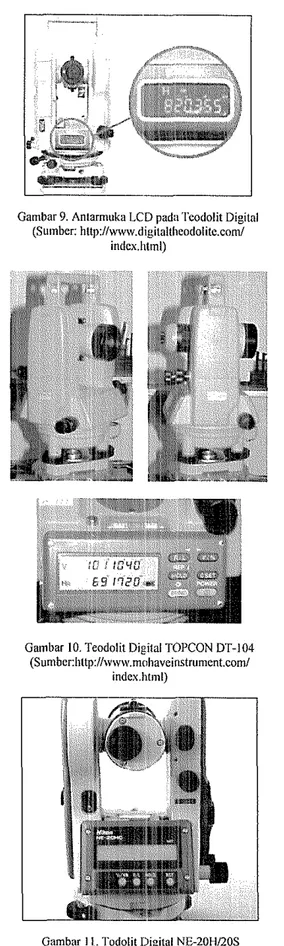
Gambar 9. Antarmuka I.CD pad;! ltodolit Digital
1
(Sumbcr: hltp://~v~v.digitaltl~codolite.com/ 1 Iindcx.html)
~
I
Galnbar 8. Thru-borc Encoder
(sumbcr:http:llwww.encoder.com/lite~alurcl optical-cncader-guide.pdf)
Teodolit digital menggunakkan LCD sebagai media antarmuka untuk menampilkan hasil pembacaan posisi sudut balon pibal seperti pada galnbar 9. Layar ini menggunakan 4 hingga tenaga baterai ukuran
AA.-Pada layar
ED
inipengamat dapat Gambar 10. Teodolit Digilal TOPCON DT-104 membaca nilai sudut dengan format derajat- (Sumbcr:lllt~:l/w~vw.ma~laveiostrument.com~index.hlml) menit-detik untuk sudut azimut denean kode
-
'H' dan sudut elevasi dengan kode 'V' secara bergantian. Beberapa teodolit memiliki dua baris tampilan digital pada layar LCD (Dual-
line LCD) sehingga dapat menampilkan uilai azimut dan elevasi secara bersamaan. Untuk penggunaan lapangan teodolit digital dilengkapi dengan tripod sebagai kaki penyangga dan beberapa aksesoris lainnya. Hasil pembacaan data dapat disimpan pada perangkat penyimpan data eksternal seperti laptop atau PDA. Beberapa produk teodolit digital yang ada di pasaran seperti gambar 10 dan 11 sudah memiliki spesifikasi tinggi seperti perkalian teropong, akurasi dan lain-
lain. Fambnr I I . Todolit 1)igital NE-20tlI20S
2.3.
Rotary
Optical Encoder
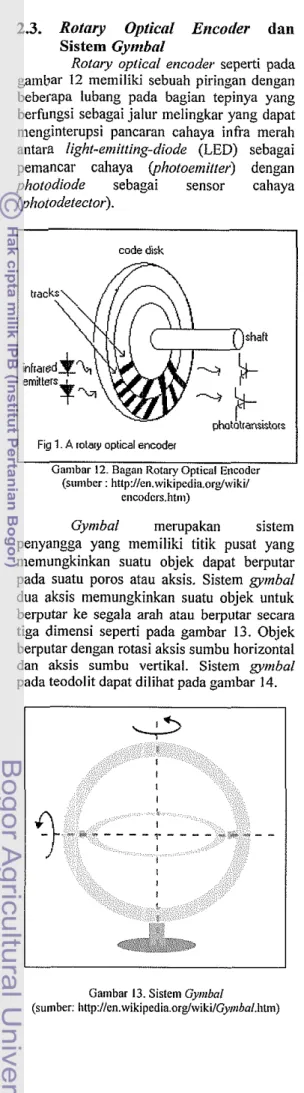
dan Sistem GyntbnlRotary optical encoder seperti pada gambar 12 memiliki sebuah piringan dengan beberapa lubang pada bagian tepinya yang berfungsi sebagai jalur melingkar yang dapat menginterupsi pancaran cahaya infra merah antara light-enzitling-diode (LED) sebagai pemancar cahaya (photoenlitter) dengan photodiode sebagai sensor cahaya
(photodetector).
code disk
1
Fig 1. A rotary optical encoder
Gambnr 12. Bagan Rotary Optical Eocadcr
(sunlber : http://cn.wikipcdia.or~wiki/
encodcrt.htn~)
Gynzbal merupakan sistem penyangga yang memiliki titik pusat yang memungkinkan suatu objek dapat berputar pada suatu poros atau aksis. Sistem gvmbal dua aksis memungkinkan suatu objek untuk berputar ke segala arah atan berputar secara tiga dimensi seperti pada gambar 13. Objek berputar dengan rotasi aksis sumbu horizontal dan aksis sumbu vertikal. Sistem gvrnbal pada teodolit dapat dilihat pada ganlbar 14.
Gdmbar 13. Sistern Gy~sbal
(sumber: Lnp:llcn.wikipedia.org/~~iki/C~~?zhol.h)
Gambar 14. Sistem Gv~~ihal pada Teodolil
(Suniber : hHp://www.~s11lb,cd~I/Sb7En1brenner/
liislory lhtm)
2.4. Pemrograman Grafis 3D
Sebuah titik pa& pemrograman 3 0 berada pada dunla maya yang memiliki tiga dimensi besaran jarak tlan titik pusat dengan koordinat (0, 0, 0) yang disebut 'dunia 3D'. Objek 3D yang beri~da pada dunia ini memiliki koortlinat lokal yang mengacu pada titik pusat tersebut. Sellerti pada vektor 2D, sebuah titik 3D pada dunia ini mengalami tiga buah transformasi dasar yaitu translasi, dilatasi, dan rotasi.
Semua objek pada dunia 3D memiliki transformasi yang mengacu pada titik pusat dunia tersebut. Namun untuk dapat ditampilkan pada layar monitor, semua objek tersebut memiliki posisi relatif terhadap sebuah titik pengamatan yang disebut dengan 'kamera'. Kamera meniiliki koordinat yang berupa titik dimana posisi pengamat berada relatif terhadap dunia 3E). Ohjek yang masuk dalam daya pandang katnera dapat ditampilkan dalam 1a)ar monitor. Dengan demikian kamera memiliki sistim koordinat yang terpisah dari dunia 3D. Jadi, dalam pemrograman 3 0 paling sedikit terdapat dua sistem koordinat dan dua buah titik pusat.
Objek yang lebih dekal dengan kamera memiliki ukuran yang lebih besar dibandingkan dengan objek lain yang kongruen dan berada lebih jauh dari kamera. Pada dunia 3D, selain terdapat dimensi yang mewakili arah atas-bawah dan dimensi yang mewakili arah kanan-kiri terdapat din~ensi jarak dalam posisi relatif objek terhadap
kamera. Hal tersebut ditampilkan pada layar yang hanya memiliki dua dimensi kanan-kiri dan atas-bawah. Dalam pemrogaman 3D ha1 ini dinamakan perspektif. Persamaan perspektif dapat mengkonversi vektor 3 0 menjadi vektor 2D. Jika sebuah titik 3D
me~niliki koordinat (x, y, z), maka untuk dapat ditampilkan di layar komputer titik ini dikenversi kedalam vektor 2D (xperspektif, yperspektif).
Ket: ~Perspektif: nilai posisi pada sumbu x
dalam vektor 2D
yperspektif: nilai posisi pada sumbu y dalam vektor 2D
x : posisi 3D pada sumbu x
Y : posisi 3D pada sumbu y
z : posisi 3 0 pada sumbu z
k : nilai konstanta untuk
jarak proyeksi.
Nilai k adalah jarak antara kamera terhadap layar yang berada di depan kamera atau pada mata manusia merupakan jarak antara pupil terhadap retina. Nilai k dapat bervariasi dan mewakili nilai kecembungan lensa mata atau kamera.