1
DESAIN OPTIMAL MULTI-STAGE FUZZY POWER SYSTEM STABILIZERS
(PSS) MENGGUNAKAN OPTIMISASI PARTICLE SWARM BERKOEFISIEN
PERCEPATAN BERAGAM WAKTU
Hotma Adi Tahir MarpaungJurusan Teknik Elektro – Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember Abstrak- Kestabilan sistem tenaga listrik sangat penting dalam
suatu sistem kelistrikan besar. Ketidakstabilan sistem pada frekuensi rendah (0.2 Hz sampai 2Hz) dapat membahayakan keamanan sistem dan batas transfer daya. Power System Stabilizer (PSS) yang melengkapi pengontrol dalam sistem eksitasi generator
mampu mengatasi ketidakstabi1an. Tugas Akhir ini
mengaplikasikan Particle Swarm Optimization Multi-Stage Fuzzy
(PSOMSF) sebagai power system stabilizer. Tujuan dari
penggunaan kontroler Particle Swarm Optimiz Multi-Stage fuzzy (PSOMSF) adalah untuk mengambil parameter besar yang tak pasti, sistem nonlinier, dan meminimalkan gangguan beban dalam perhitungan.. Dari hasil simulasi multi-stage fuzzy power sistem stabilizers yang telah ditala dengan PSO diharapkan mampu menaikkan performansi PSS, sehingga dapat meningkatkan daya pengiriman dalam jaringan.
Kata kunci- PSO dengan TVAC, Multi-stage Fuzzy, PSS, FLC.
I. P
ENDAHULUANSistem tenaga listrik secara umum terdiri dari beberapa unit pembangkit, saluran transmisi, dan berbagai pusat beban. Dalam pengoperasiannya sistem tenaga listrik tidak lepas dari gangguan. Gangguan yang terjadi dapat berupa perubahan beban secara tiba-tiba atau periodik. Adanya perubahan-perubahan tersebut akan mempengaruhi kestabilan sistem tenaga listrik. Stabilitas sistem tenaga listrik didefinisikan sebagai kemampuan suatu sistem tenaga listrik untuk mempertahankan sinkronisasi dan keseimbangan dalam sistem akibat adanya gangguan [1].
Stabilitas sistem tenaga listrik dapat dijaga dengan meredam osilasi rotor mesin sinkron saat terjadi gangguan. Untuk memberi peredaman dibutuhkan power system stabilzer yang dipasang sebelum AVR. PSS harus menghasilkan komponen torsi elektrik pada mesin se-phase[1]. Peranan vital PSS dalam sebuah generator sinkron mendorong berkembangnya penelitian dalam bidang ini. Hal ini dibuktikan dengan banyaknya paper-paper yang mengembangkan PSS dalam berbagai metode.
Pada Tugas Akhir ini, akan dijelaskan tentang penggunaan fuzzy PID sebagai pengganti fase lead/lag dari sebuah PSS. Namun penerapan fuzzy PID dalam fase lead/lag sangat sulit, karena memerlukan rule base tiga dimensi[2]. Untuk mengatasi permasalahan ini maka diperlukan sebuah sebuah kontroler multi-stage fuzzy yang menggunakan rule base 2 dimensi. Dengan adanya multi-stage fuzzy maka mempermudah penggunaan fuzzy PID dalam PSS. Untuk menjaga agar rule base dari fuzzy mampu mengotrol sistem dengan baik, maka himpunan fuzzy harus didesain dengan hati-hati. Permasalahan umum yang menggangu keefektifan dalam metode ini adalah kesulitan pengakuratan dari fungsi keanggotaan[2].
Pada Tugas Akhir ini penalaan fungsi keanggotan dilakukan dengan algoritma Particle Swarm Optimization based Time varying aceleration coefficient (PSO-TVAC) atau PSO dengan koefisien percepatan beragam waktu. Algoritma PSO-TVAC digunakan karena dapat mempertinggi pencarian global pada bagian awal optimisasi
dan mendorong partikel-partikel berkumpul pada nilai global optimum pada akhir pencarian. Metode ini mampu mempercepat pencarian nilai konvergensinya dibandingkan dengan PSO konvensional. Dengan mempercepat nilai konvergensinya diharapkan mampu meningkatkan performansi PSS dalam meredam perubahan torsi rotor pada saat terjadi gangguan atau adanya perubahan beban.
II. D
ASART
EORI2.1. Power System Stabilizer (PSS)
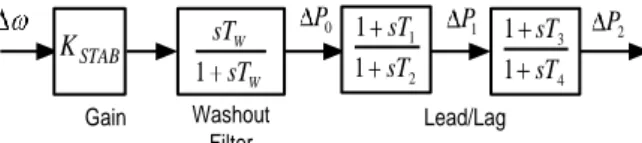
PSS merupakan suatu blok tambahan pada kontrol eksitasi generator atau Automatic Voltage Regulator (AVR) untuk meningkatkan performansi dinamik sistem tenaga listrik, terutama untuk mengendalikan osilasi yang terjadi pada rotor generator. Ini adalah suatu metoda untuk meningkatkan performansi kestabilan pada jaringan sistem tenaga listrik. PSS adalah peralatan yang terdiri dari :
1. Blok Gain, berfungsi untuk mengatur penguatan agar diperoleh besaran torsi sesuai dengan yang diinginkan.
2. Blok Washout filter, befungsi untuk mengatur on-off-nya PSS yang mengacu pada osilasi pada range keadaan slow transien (dinamis). Bila frekuensi berada pada range tersebut PSS akan bekerja dan bila berada di luar range itu maka PSS menjadi tidak bekerja.
3. Blok Lead/Lag, berfungsi sebagai penghasil karakteristik phase-lead yang sesuai untuk mengkompensasi phasa-lag antara masukan eksitasi dan torsi generator.
Input PSS berupa sinyal frekuensi, kecepatan sudut rotor dan daya. Output dari PSS berupa sinyal tegangan yang ditambahkan ke dalam rangkaian eksitasi. Gambar 2.1 sebagai representai PSS. W W sT sT 1 Gain Washout Filter Lead/Lag STAB K 4 3 1 1 sT sT 2 1 1 1 sT sT 0 P P1 P2
Gambar 2.1 Representasi Power System Stabilizer
2.2. SMIB (Single Machine Infinite Bus)
Dalam membuat model linear sistem jaringan tenaga listrik mesin tunggal, sistem diasumsikan sebagai berikut :
1. Sistem terdiri dari mesin tunggal yang terhubung bus infinit.
2. Tahanan stator diabaikan.
3. Kondisi sistem dianggap seimbang dan kejenuhan inti generator diabaikan.
2
Bus infinit
R,L
Gambar 2.1, Generator terhubung ke bus infinit
III. M
ETODOLOGI3.1
Particle Swarm OptimizationParticle Swarm Optimization (PSO) merupakan sebuah populasi berdasarkan teknik optimisasi yang dikembangkan oleh Dr.Eberhart dan Dr.Kennedy tahun 1995, diinspirasikan berdasarkan tingkahlaku sosial kawanan burung atau proses pembelajaran ikan. Proses PSO merupakan stokastik di alam. PSO menggunakan kecepatan vektor untuk mereposisikan setiap posisi yang dimiliki partikel dalam kawanan. Vektor kecepatan diperbaharui berdasarkan kekuatan memori dari setiap partikel. PSO belajar dari skenario dan menggunakannya untuk menyelesaikan masalah optimasi. Dalam PSO setiap satu solusi atau partikel merupakan burung dalam ruang pencarian.Semua partikel mempunyai nilai kecocokan yang dievaluasi oleh fungsi kecocokan yang dioptimasi, dan mempunyai kecepatan terbang secara langsung dari setiap partikel. Partikel-partikel terbang melewati ruang masalah dengan mengikuti partikel optimal terbaru.
PSO diinisialkan dengan kumpulan partikel acak (solusi) yang pencarian optimalnya dilakukan dengan memperbaharui generasi-generasi. Dalam setiap iterasi, setiap partilkel diperbaharui dengan mengikuti dua nilai terbaik. Pertama disebut solusi terbaik (fitness) yang telah dicapai terjauh (nilai fitness terbaru tetap diterima). Nilai ini disebut pbest. Nilai terbaik lain yang di telusuri oleh PSO merupakan nilai terbaik yang dimiliki sejauh ini oleh setiap partikel dalam populasi. Nilai ini disebut nilai global atau gbest. Ketika partikel-partikel mengambil bagian dalam populasi sesuai topologi tetangga, nilai terbaik disebut nilai lokal atau lbest. Setelah menemukan 2 nilai terbaik, partikel-partikel memperbaharui kecepatan dan posisinya. Berikut adalah alur Algoritme PSO yang dikembangkan oleh Kennedy & Eberhart :
1. Inisialisasi
(a) Tentukan konstanta-konstanta
k
max,
c
1,
c
2(b) Inisialisasi secara acak posisi partikel-partikel
D
x
0i padaR
nuntuki
1
,...,
p
(c) Inisialisasi secara acak kecepatan partikel-partikel
0
v
0iv
0max untuki
1
,...,
p
(d) Tentukan
k
1
2. Optimasi
1. Evaluasi nilai fungsi
f
kimenggunakan ruang desain koordinat-koordinatx
ki2. Jika
f
kif
besti makaf
bestif
ki,
p
kix
ki 3. Jikaf
kif
besti makaf
bestgf
ki,
p
kgx
ki 4. Jika kondisi pemberhentian (stoppingcondition) terpenuhi, maka dilakukan langkah nomor 3
5. Kecepatan semua partikel
v
kiuntukp
i
1
,...,
diperbarui6. Posisi semua partikel
x
ikuntuki
1
,...,
p
diperbarui
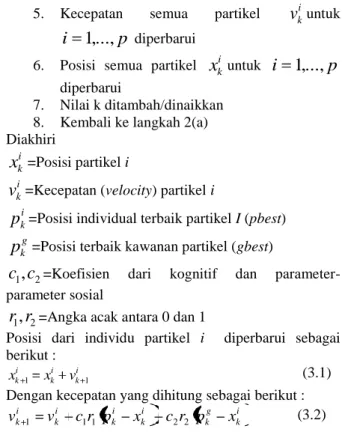
7. Nilai k ditambah/dinaikkan 8. Kembali ke langkah 2(a) 3. Diakhiri i k
x
=Posisi partikel i i kv
=Kecepatan (velocity) partikel ii k
p
=Posisi individual terbaik partikel I (pbest)g k
p
=Posisi terbaik kawanan partikel (gbest)2 1
,c
c
=Koefisien dari kognitif dan parameter-parameter sosial2 1
, r
r
=Angka acak antara 0 dan 1Posisi dari individu partikel i diperbarui sebagai berikut : i k i k i k x v x 1 1 (3.1)
Dengan kecepatan yang dihitung sebagai berikut : i k g k i k i k i k i k v cr p x c r p x v 1 11 22 (3.2)
Kecepatan partikel pada setiap dimensi diapit untuk sebuah kecepatan maksimum Vmaks. Jika jumlah dari percepatan akan menyebabkan kecepatan dalam dimensi tersebut untuk melampaui Vmaks yang telah dispesifikasi oleh pengguna. Maka, kecepatan dari setiap dimensi akan dibatasi hingga Vmaks.
3.1 PSO dengan koefisien percepatan beragam waktu atau PSOTVAC
Ide awal pada TVAC adalah untuk mempertinggi pencarian global pada bagian awal optimisasi dan mendorong partikel-partikel berkumpul pada nilai global optimum pada akhir pencarian. Hal ini dicapai oleh perubahan koefisien-koefisien percepatan c1 dan c2 terhadap
waktu, dengan cara komponen cognitive dikurangi ketika komponen sosial dinaikkan sesuai proses pencarian. Dengan komponen cognitive yang besar dan komponen sosial yang kecil pada permulaan, partikel-partikel diijinkan untuk bergerak mengelilingi ruang pencarian daripada bergerak menuju nilai populasi terbaik selama tahap awal. Pada sisi lain, nilai komponen cognitive yang kecil dan nilai komponen sosial yang besar mengijinkan partikel-partikel bertemu pada nilai global optimum pada bagian terakhir dari proses optimasi. Berikut ini adalah rumus koefisien-koefisien percepatan:
3.3 3.4 Dimana c1i,c1f,c2i dan c2f adalah nilai-nilai awal dan akhir
dari faktor-faktor cognitive dan acceleration secara berturut-turut.
3.2 FUZZY LOGIC CONTROLLER
Fuzzy logic controller (FLC) merupakan suatu metodologi kontrol yang menggunakan metode telaah atau uraian manusia dari kontrol fisik dan strategi untuk ditirukan dalam suatu langkah yang alami.
3
Konsep logika fuzzy ini didasarkan pada metode clustering (pengelompokan) berdasarkan variabel bahasa manusia (linguistik variable) yang memiliki batas-batas kelas yang samar kemudian dinyatakan dalam fungsi keanggotaan. Di dalam fungsi semesta U, fungsi keanggotaan fuzzy tersebut bernilai 0 hingga 1. Setelah terjadi pengelompokan kemudian masing-msing dari kelas ini di pilah sesuai dengan rule base yang membangun kontroler tersebut. Rule based yang digunakan alam logika fuzzy ini adalah berupa intuitif dari seorang pakar yang memiliki banyak pengalaman dan mengetahui karakteristik sistem. Logika fuzzy ini banyak digunakan karena memiliki keunggulan yang antara lain,1. Mampu beroprasi tanpa campur tangan manusia tetapi memiliki efektifitas yang sama seperti kontroller manusia.
2. Kemampuan dalam proses penalaran nsecara bahasa (lingusitic reasoning), sehingga dalam perancanganya tidak memerlukan persamaan matematik dari objek yang akan dikendalaikan. 3. Stukturnya sederhana dan mampu bekerja real
time.
4. Mampu menangani sistem yang linier maupun non linier
5. Tidak membutuhkan training dan hanya pengaplikasian pengalaman.
3.2.1 Cara Kerja Kontrol Fuzzy
Cara kerja logika fuzzy menirukan model berfikir otak manusia dalam megnambil keputusan. Pengatur loga fuzzy membuat keputusan sebagai sinyalalur berdasarkan pada masukan dan keluaran yang telah terjadi sebelumnya yang berbentuk variabel lingustik. Secara umum di dalam sistematika kontrol fuzzy terdapat beberapa tahapan operasional yang meliputi,
1. Fuzzyfikasi
2. Penalaran (inference machine) 3. Aturan Dasar (Rule based) 4. Deffuzyfikasi
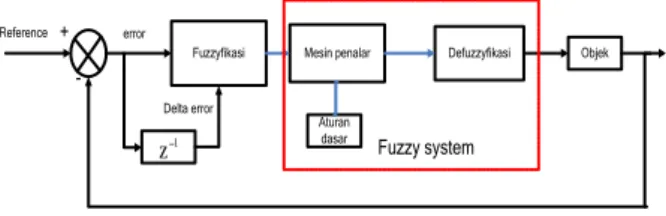
Sistematika kontrol fuzzy pada poin 1-4 di atas dapat dinyatakan dalam bentuk blok diagram pada gambar 3.1 berikut ini,
Fuzzyfikasi Mesin penalar Defuzzyfikasi Objek
1 z Aturan dasar Reference + -error Delta error Fuzzy system
Gambar 3.1, Blok diagram Logika Fuzzy
Gambar 3.1 diatas dapat juga dinyatkan dalam sebuah alir (flowchart) kerangka operasional Fuzzy logic controller diagram yang ditunjukan oleh gambar 3.2
Pada gambar 3.2 input kerangka logika fuzzy menggunakan input crips kemudian di lanjutkan dengan proses fuzzykasi untuk memperoleh derajat keanggotaan
fuzzy. Kemudian dilakukan proses penalaran menggunakan aturan dasar (rule base) yang telah ditetapkan. Terkhir dilakukan difuzyfikasi untuk memperoleh output crips sesuai dengan input semula. Input pada kerangka kerja fuzzy pada gambar 3.2 merupakan fungsi tegas yang diperoleh dari,
1. Sinyal error atau selisih antara sinyal rujukan dengan sinyal keluaran daru kerangka kerja fuzzy 2. Delta error, turunan pertama dari error sistem
Input nilai Crips
Fuzzyfikasi
Proses penalaran (inference)
Atiran dasar (Rule based)
Deffuzyfikasi
output nilai Crips
Gambar 3.2 Kerangka Kerja Logika Fuzzy
IV. SIMULASI DAN ANALISIS
Studi simulasi dan analisis kontroler PSOMSF sebagai pengganti dari power system stabilizer (PSS) diterapkan pada sistem tenaga listrik Single Machine Infinite Bus (SMIB) dengan menggunakan matlab. Tahap awal adalah membentuk model sistem tenaga listrik tersebut kedalam bentuk persamaan seperti yang terdapat pada bab II. Tahap kedua adalah memasukkan data-data yang diperlukan untuk data mesin, seperti K1,K2, K3, K4, K5, K6
dan lain sebagainya. Tahap ketiga adalah mengambil sinyal perubahan sudut rotor sebagai input dari PSS (power system stabilizers). Tahap keempat adalah mengganti PSS dengan multy stage fuzzy. Tahap kelima adalah menggunakan metode particle swarm optimization untuk menala fungsi keanggotaan dari multi stage fuzzy. Hal ini dilakukan agar keluaran dari PSS menghasilkan sinyal yang baik karena fungsi keanggotaan telah dioptimasi dengan PSO. Dalam simulasi, sistem diberi gangguan berupa permintaan daya dari beban.
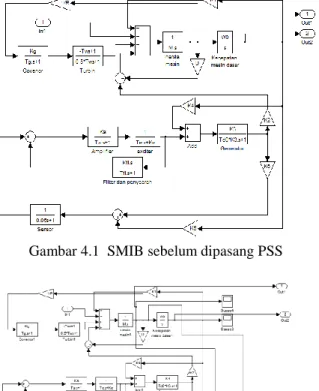
4.1 DESAIN SMIB
Desain sistem kelistrikan dalam Tugas Akhir ini menggunakan SMIB (Single Machine Infinite Bus) yang terdiri dari sistem turbin, sistem eksitasi, generator sinkron dan beban statis seperti yang telah dijabarkan pada Bab II. Gambar 4.1 merupakan gambar pemodelan SMIB sebelum pemasangan MSFPSO, sedangkan gambar 4.2 adalah gambar pemodelan SMIB setelah pemasangan MSFPSO. MSFPSO dipasang sebagai pengganti PSS. MSFPSO menggunakan perubahan sudut rotor sebagai inputannya.
4
Gambar 4.1 SMIB sebelum dipasang PSSGambar 4.2 SMIB setelah dipasang PSS Tabel 4.1 Parameter Sistem
Parameter Mesin Nilai
Data-data Generator Frekuensi (f) 50 W0= 2 pi f M 8 D 4 Td0 12.8 Tw 0.9 T1 0.3 T2 0.5 T3 0.45 T4 0.5 Kpss 4 Data-data turbin Kg 0.15 Tg 0.4 Tw 0.4 R 0.05
Data-data siste eksitasi
Ke 1 Te 0.46 Ka 46 Ta 0.06 Kfi 0.1 Tfi 1 Faktor-faktor lain K1 2.3983 K2 1.4755 K3 0.1921 K4 1.3095 K5 -0.5625 K6 0.0583
4.2 Pemodelan Multi Stage Fuzzy
Pemodelan Multi Stage Fuzzy dilakukan dengan matlab, hal ini dilakukan untuk memudahkan dalam memodelkan FLC itu sendiri. Berikut adalah gambar pemodelan Multi Stage Fuzzy.
Gambar 4.3 Desain Multi Stage Fuzzy logic
Sebagaimana telah dijelaskan pada bab III bahwa multi-stage fuzzy merupakan gabungan dari 2 atau lebih FLC. Pada gambar 4.3 terdapat 2 FLC sehingga membentuk multi-stage fuzzy. Input dari FLC pertama berasal dari kontroler proporsional dan deferensial, sedangkan input FLC kedua berasal dari output FLC pertama dan integrator. Hal ini dilakukan untuk meringankan proses dalam mendesain FLC. Jika kontroler proportional, deferential dan integrator dimasukkan dalam sebuah FLC maka akan membutuhkan rule base dengan 3 dimensi. Rule base 3 dimensi sangat sulit untuk direalisasikan. Oleh sebab itu multi stage fuzzy merupakan pilihan baik untuk mengatasi permasalahan ini.
4.2.1 Pengaturan fungsi keanggotaan
Pada tugas akhir ini, semua fungsi keanggotaan dalam pemodelan segitiga dengan 7 segments dari -1 sampai 1. Zero (ZO) merupakan pusat dari fungsi keanggotaan dengan berpusat di nol seperti yang ditunjukkan pada gambar 4.4. Bagian-bagian lainnya adalah negatif big (NB), negatif mediun (NM), negative small (NS), positive small (PS), positive medium (PM), positive big (PB).
Gambar4.4 Pembagian simetris fuzzy
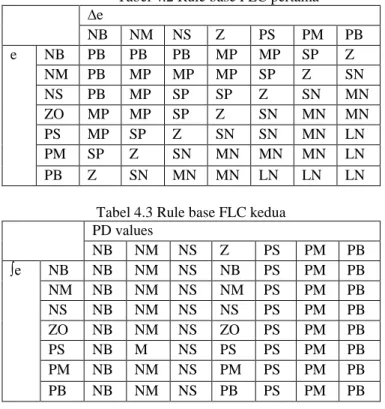
Ada dua rule base yang digunakan dalam kontroler MSF. Pertama ialah rule base untuk FLC pertama, sebagaimana dioperasikan dalam bentuk vektor kebenaran yang terdiri dari input error dan (e) dan input perubahan error (∆e). PD rule base untuk fuzzy logic controller dapat dilihat pada tabel 4.2. Rule base ini merespon negatif input dari error lainnya(e) atau perubahan error (∆e) dengan
5
sebuah negatif input sehingga mendorong sistem menghindari command value.Tabel 4.3 memperlihatkan sebuah PID switch rule base. PID switch rule base diperlukan untuk rule base inputan yang berasal dari FLC pertama dan inputan dari integrator.
Tabel 4.2 Rule base FLC pertama ∆e NB NM NS Z PS PM PB e NB PB PB PB MP MP SP Z NM PB MP MP MP SP Z SN NS PB MP SP SP Z SN MN ZO MP MP SP Z SN MN MN PS MP SP Z SN SN MN LN PM SP Z SN MN MN MN LN PB Z SN MN MN LN LN LN
Tabel 4.3 Rule base FLC kedua PD values NB NM NS Z PS PM PB ∫e NB NB NM NS NB PS PM PB NM NB NM NS NM PS PM PB NS NB NM NS NS PS PM PB ZO NB NM NS ZO PS PM PB PS NB M NS PS PS PM PB PM NB NM NS PM PS PM PB PB NB NM NS PB PS PM PB
4.2.1 Desain Fuzzy Logic Control
Desain FLC pada Tugas Akhir ini dilakukan dengan matlab. Berikut ini adalah tahap-tahap dalam FLC :
1. Evaluasi nilai keanggotaan dari setiap input, Contoh : untuk input (x)1 yang berasal dari kontroler proportional, x adalah negaif big sehingga diberi nomor [0,1] sesuai dengan fungsi keanggotaan tringular.
2. Evaluasi firing strength wij dari setiap rule (ij)
menggunakan minimum operator
3. Evaluasi nilai crisp dari output, berdasar pada formula berikut ini
sum(wij*zij)/sum(wij).
4.2.2 Inisialisasi Parameter
Sebelum dijalankan maka langkah awal yang harus dilakukan adalah inisialisasi parameter. Terdapat beberapa parameter yang harus diinialisasi terlebih dahulu, yaitu :
a. Size of swarm “ no of birds” : yang merupakan banyaknya partikel yang akan digunakan untuk mencari matriks member function yang optimal. b. Jumlah variabel : merupakan banyaknya parameter
atau variabel yang akan dioptimisasi. Disini terdapat 8 variabel yang akan dioptimasi yaitu NM1, NS1, PS1, PM1, NM2, NS2, PS2 dan PM2. NB1,PB1,NB2 dan PB2 tidak dioptimasi karena di set pada nilai 1.
c. Maximum number of “bird step” : banyaknya iterasi yang diperlukan untuk memperoleh nilai optimal
d. c1i, c1f, c2i, c2f yang merupakan bagian dari c1 dan
c2. c1i, c1f, c2i, c2f merupakan nilai-nilai awal dan
akhir dari faktor-faktor cognitive dan social acceleration secara berturut-turut. Berikut rumus dari c1 dan c2
e. W atau faktor inertia yang terdiri dari wmax dan
wmin yang diperoleh dari rumus
f. Menentukan matriks konstanta PSO yaitu R1 dan R2 dimana
R = rand (jumlah_variabel, jumlah partikel). g. Menentukan batas bawah dan batas atas dari setiap
variabel.
h. Menentukan batas kecepatan maksimum dan batas kecepatan minimum, dimana
kecepatan maksimum = 0.5*( batas atas - batas bawah), dan kecepatan minimum = 0
i. Menentukan posisi awal dari setiap variabel, dimana
current_position = ((batas atas - batas bawah) *rand(1,jumbird)+ batas bawah).
j. Menentukan nilai kecepatan awal dari setiap variabel
Kecepatan = ((v_maks– v_min)*rand((1,jumbird) + kecepatan_bawah) Jumlah partikel 50 Jumlah variabel 8 Maksimum iterasi 100 c1i 0.25 c1f 0.5 c2i 0.5 c2f 0.25
Tabel.4.5 Inialisasi parameter awal PSO
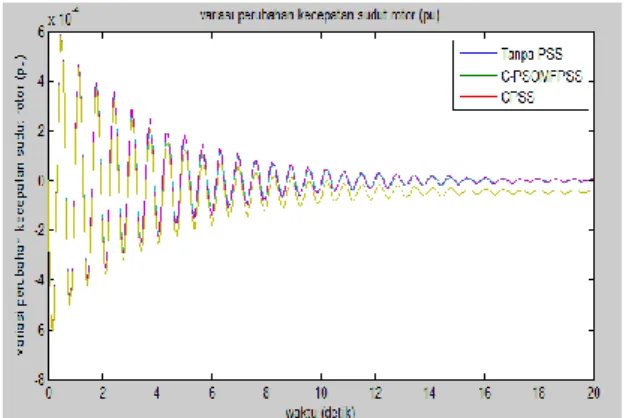
4.5. Hasil simulasi
Berikut ini adalah hasil-hasil simulasi yang telah diperoleh.
Gambar 4.5 Perubahan kecepatan sudut rotor terhadap waktu dengan PSO-TVAC
6
Gambar 4.6 Perubahan kecepatan sudut rotor terhadapwaktu dengan C-PSO
Gambar 4.6 Grafik Konvergensi C-PSO dan PSO-TVAC
Tabel 4.5 Perbandingan konvergensi C-PSO dan PSO-TVAC C-PSO PSO-TVAC Fungsi Fitness 0.004115 0.001515 Iterasi 40 20 Tabel 4.6 Perbandingan V. KESIMPULAN
Dari hasil simulasi penerapan PSOMSF sebagai pengganti PSS dalam sebuah sistem kelistrikan Single Machine Infinite Bus (SMIB) maka dapat ditarik kesimpulan sebagai berikut.
1.
Algoritma Particle Swarm Optimization dengan koefisien percepatan beragam waktu dapat digunakan untuk menala fungsi keanggotaan dari sebuah fuzzy logic controller.2.
Penerapan sistem multi stage fuzzy dapat dilakukan untuk mengurangi rule base dari fuzzyPID. Dengan penerapan multistage fuzzy maka, rule base dari 3 dimensi dari sebuah FLC dapat disederhanakan menjadi 2 dimensi.
3.
Optimisasi dengan PSO dapat memperbaiki respon perubahan kecepatan sudut rotor bial terjadi perubahan beban.4.
Penentuan parameter PSO yang tepat akan menghasilkan respon dinamik sistem yang lebih baikVI. SARAN
1. Penerapan PSOMSF dilakukan pada sistem multi machine atau sistem yang lebih besar seperti sistem JAMALI.
2. Jika hasil kurang baik, proses multi-stage fuzzy dapat diperbesar. Dari 2 FLC menjadi 3 atau bahkan selebihnya untuk memperoleh performansi yang maksimal
VII.
REFERENSI
[1] Imam Robandi,” Desain Sistem Tenaga Modern, Penerbit ANDI, Yogyakarta, 2006.
[2] Anderson P.M, FouadA.A, Power Control and Stability, The lowa State University, Press.1982. [3] H. Shayeghi , A. Jalili and H.A. Shayanfar,
Multi-stage fuzzy load frequency control using PSO, Elsevier, 2007.
[4] Krishna Teerth Chaturvedi, Manjaree Pandit, Laxmi Srivastava, Particle swarm optimization with time varying acceleration coefficients for non-convex economic power dispatch, Elsevier, 2007.
[5] Kundur,.P, Power System Stability and Control, McGraw-Hill,Inc.,1994.
[6] Imam Robandi, and Bedy Kharisma. “Design of Interval Type-2 Fuzzy Logic Based Power System Stabilizer”, PWASET Volume 31, ISSN 1307-6884. 2008.
[7] As’adi, Bamatraf, Indralaksono and Imam Robandi.” Optimal Tuning of PSS and AVR Gain Using Particle Swarm Optimization Time Varying Acceleration in Single Machine Infinite Bus (SMIB)”.APTECT 1st,Surabaya, November 2009
RIWAYAT HIDUP
Hotma Adi Tahir Marpaung lahir di Jayapura, Papua pada tanggal 29 Desember 1987. Pada Tahun 1999 penulis menyelesaikan studi di SDN Kotaraja Jayapura. Penulis melanjutkan studi di SMPN 2 Jayapura dan melanjutkan studi berikutnya di SMPN 19 Surabaya pada tahun 2000. Setelah lulus dari SMAN 17 Surabaya, penulis melanjutkan studi S1 di Institut Teknologi Sepuluh Nopem-ber (ITS) Surabaya, Jurusan Teknik Elektro bidang studi Teknik Sistem Tenaga. Penulis dapat dihubungi melalui alamat email : [email protected]
PSO-TVAC C-PSS Tanpa PSS C-PSO Settling time 10.2 23.6 24.5 25.5 Nilai Oversho ot 0,00051 3 0,00 063 0,0006 7 0.00065