PINTU BUS OTOMATIS BERBASIS
MIKROKONTROLER AT89S8252 PADA SISTEM
IDENTIFIKASI TIKET PENUMPANG OTOMATIS
Tugas Akhir
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun oleh :
INDRA CHRISTIAWAN NIM : 015114053
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA YOGYAKARTA
THE AUTOMATIC BUS DOOR BASED ON
MICROCONTROLLER AT89S8252 OF
AUTOMATIC PASSENGER TICKET
IDENTIFICATION SYSTEM
A Final Project
Submitted For The Partial Fulfillment Of The Requirements For The Degree Of Electrical Engineering Of
Electrical Engineering Program Study
By :
INDRA CHRISTIAWAN NIM : 015114053
ELECTRICAL ENGINEERING STUDY PROGRAM ENGINEERING FACULTY
SANATA DHARMA UNIVERSITY YOGYAKARTA
2007
MOTTO DAN PERSEMBAHAN
PERSEMBAHAN
Kupersembahkan untuk seluruh keluarga yang telah mendukung segalanya, dan semua orang yang mau menghargai dan menghormati hasil karya orang lain
MOTTO
1. Diam itu emas, cerewet itu sampah. 2. Be cool, calm and confident.
PEMBUKA DAN PENUTUP PINTU BUS OTOMATIS
BERBASIS MIKROKONTROLER AT89S8252 PADA
SISTEM IDENTIFIKASI TIKET PENUMPANG
OTOMATIS
Intisari
Menutup dan membuka pintu bus seringkali terasa kurang nyaman dan sulit dilakukan seseorang saat akan menaiki alat transportasi tersebut, pembuka dan penutup pintu bus otomatis dapat menjadikan akses masuk ke bus menjadi lebih mudah dan nyaman.
Mikrokontroler AT89S8252 berperan sebagai pengendali utama. Subsistem ini sebagai bagian dari sistem pengidentifikasi tiket penumpang otomatis mempergunakan penerapan motor DC sebagai penggerak. Sensor yang digunakan adalah fototransistor. Sensor ini berfungsi sebagai penerima rangsangan cahaya inframerah untuk kemudian diproses oleh mikrokontroler. Mikrokontroler mengatur proses pembukaan, penutupan pintu, serta indikator.
Pembukaan dan penutupan pintu dapat dilakukan secara otomatis oleh penggerak berupa motor DC.
THE AUTOMATIC BUS DOOR BASED ON
MICROCONTROLLER AT89S8252 OF
AUTOMATIC PASSENGER TICKET
IDENTIFICATION SYSTEM
Abstract
Opening or closing a door when we ride a bus eventually feel hard and not comfortable doing by own self, an automatically bus door will make our access in to the bus easier and comfortable.
AT89S8252 microcontroller has a role as the main controller. A dc motor applied as actuator in this subsystem which is a part of the automatic passenger ticket identification system. Phototransistor used as it sense. This censor takes place in receiver of the infrared light to be processed by microcontroller. The microcontroller have a job to process when opening, closing and also indicator lighting.
Opening and closing the bus door can be done automatically by dc motor as the actuator.
Keyword: Automatic, dc motor, microcontroller AT89S8252, infrared censor
KATA PENGANTAR
Puji Tuhan.
Meskipun dengan hasil yang kurang memuaskan perangkat pendukung proyek APTIS yang berupa pintu otomatis ini dapat terselesaikan atas kerjasama berbagai pihak.
Dengan selesainya tugas akhir serta proyek penelitian ini sudah sepantasnya penulis mengucapkan banyak terima kasih :
1. Ibu dan Bapak yang telah mendukung dan membiayai segalanya.
2. Bapak Ir. Iswanjono, M.T selaku pembimbing, atas segala bantuan dan bimbingannya dari awal hingga akhir pembuatan proyek ini.
3. Adik dan kakak yang tercinta.
4. Teman-teman seperjuangan dalam proyek APTIS ini dan teman-teman peserta proyek PHK yang lain.
5. Mas Pinto yang meminjamkan downloadernya serta bantuan-bantuan lainnya. 6. Teman-teman main simulasi bal-balan ketika jenuh dan teman-teman main
bal-balan beneran.
7. Teman–teman Teknik Elektro 2001 semoga sukses dalam kehidupan selanjutnya.
8. Seluruh dosen Fakultas Teknik yang telah mengajarkan ilmunya selama kuliah di Universitas Sanata Dharma.
9. Pak Petrus Setyo Prabowo S. T, selaku dosen Pembimbing Akademis TE’01. 10.Bapak A. Bayu Primawan, S.T.,M.Eng selaku Ketua Jurusan Teknik Elektro,
Universitas Sanata Dharma, Yogyakarta.
12.Dan semua pihak yang tidak tersebutkan.
Penulis menyadari bahwa dalam pembuatan dan penulisan tugas akhir ini masih
banyak kelemahan dan kekurangan. Karena itu kritik dan saran dari semua pihak sangat diharapkan.
Semoga tugas akhir ini dapat bermanfaat bagi kita semua, Tuhan beserta kita.
Yogyakarta, Maret 2007
Penulis
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN PEMBIMBING... iii
HALAMAN PENGESAHAN PENGUJI... iv
PERNYATAAN KEASLIAN KARYA... v
MOTO DAN PERSEMBAHAN... vi
INTISARI... vii
ABSTRACT... viii
KATA PENGANTAR... ix
DAFTAR ISI... xi
DAFTAR TABEL... xiv
DAFTAR GAMBAR... xv
BAB I PENDAHULUAN... 1
1.1 Latar Belakang ... 1
1.2 Tujuan dan Manfaat Penelitian ... 1
1.3 Batasan Masalah ... 1
1.4 Metodologi Penelitian... 2
1.5 Sistematika Penulisan ... 2
BAB II DASAR TEORI ... 4
2.1 Diagram Blok ... 4
2.2 Mikrokontroler AT89S8252 ... 4
2.2.2 Organisasi memori AT89S8252………. 5
2.2.3 Register AT89S8252……….. 5
2.2.3.1 Register Dasar………. 6
2.2.3.2 Register Serba Guna ……… 6
2.2.3.3 Register Khusus (SFR) ……… 6
2.2.4 Register Timer/Counter ………. 7
2.3 Transistor sebagai saklar... 8
2.4 Rangkaian pembanding... 10
2.5 LED (Light Emitting Diode)... 11
2.6 LED Inframerah ... 11
2.7 Phototransistor ... 12
2.8 Medan Magnetik ... 12
2.8.1 Induksi magnetik pada solenoid………. 13
2.8.2 Gaya Lorentz………. 14
2.9 Motor DC ... 14
2.10 Gerak rotasi... 16
BAB III PERANCANGAN ... 17
3.1 Perancangan perangkat keras... 17
3.1.1 Perancangan otomatisasi pintu ………. 18
3.1.2 Mikrokontroler AT89S8252………. 20
3.1.3 LED Infrared………. 21
3.1.4 Sensor……… 22
3.1.5 Solenoid ……… 24
3.1.6 Indikator ……… 25
3.1.7 Penggerak ………. 26
3.1.8 Sensor limit ……….. 28
3.2 Konstruksi Peralatan ……… 28
3.3 Diagram Alir ……… 30
BAB IV PENGAMATAN DAN PEMBAHASAN ... 33
4.1 Pengamatan Terhadap Tegangan Keluaran Pada Catu Daya... 35
4.2 Pengamatan Sensor ... 35
4.3 Pengamatan Pada Motor ... 37
4.4 Pengamatan Pewaktuan Pada Saat Pintu Membuka dan Menutup... 37
4.5 Pengamatan Pewaktuan Lamanya Pintu Terbuka... 38
4.6 Pengamatan Kerja Mikrokontroler Berdasarkan Simulasi ... 39
BAB IV PENUTUP... 43
5.1 Kesimpulan ... 43
5.2 Saran ... 43
DAFTAR PUSTAKA... 44
DAFTAR TABEL
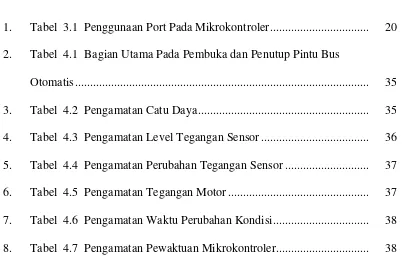
1. Tabel 3.1 Penggunaan Port Pada Mikrokontroler... 20
2. Tabel 4.1 Bagian Utama Pada Pembuka dan Penutup Pintu Bus Otomatis... 35
3. Tabel 4.2 Pengamatan Catu Daya... 35
4. Tabel 4.3 Pengamatan Level Tegangan Sensor ... 36
5. Tabel 4.4 Pengamatan Perubahan Tegangan Sensor ... 37
6. Tabel 4.5 Pengamatan Tegangan Motor ... 37
7. Tabel 4.6 Pengamatan Waktu Perubahan Kondisi... 38
8. Tabel 4.7 Pengamatan Pewaktuan Mikrokontroler... 38
DAFTAR GAMBAR
1. Gambar 2.1 Diagram Blok Peralatan Otomatisasi Pintu ... 4
2. Gambar 2.2 Rangkaian Dasar Transistor ... 8
3. Gambar 2.3 Kurva Tegangan-arus Transistor Dengan Garis Beban ... 9
4. Gambar 2.4 Transistor Bekerja Sebagai Inverter... 9
5. Gambar 2.5 Rangkaian Pembanding... 10
6. Gambar 2.6 Rangkaian Dasar LED ... 11
7. Gambar 2.7 Rangkaian LED Infrared... 12
8. Gambar 2.8 Rangkaian Dasar Fototransistor ... 12
9. Gambar 2.9 Solenoid Berinti Bahan Ferromagnetik... 13
10. Gambar 2.10 Arah Gaya Lorentz... 14
11. Gambar 2.11 Kontruksi Motor DC ... 15
12. Gambar 2.12 Perpaduan Antara Dua Buah Gerak Rotasi... 16
13. Gambar 3.1 Diagram Blok Otomatisasi Pintu Berbasis Mikrokontroler AT89S8252... 17
14. Gambar 3.2 Perancangan Otomatisasi Pintu... 20
15. Gambar 3.3 Diagram Blok Penggunaan Port Mikrokontroler AT89S8252 Pada Rancangan Otomatisasi Pintu ... 21
16. Gambar 3.4 Rangkaian LED Infrared... 22
17. Gambar 3.5 Rangkaian Dasar Fototransistor Terhalang OFF ... 23
18. Gambar 3.6 Rangkaian Pembanding... 24
19. Gambar 3.7 Rangkaian Solenoid ... 25
20. Gambar 3.8 Rangkaian LED Indikator ... 26
22. Gambar 3.10 Rangkaian Sensor Limit Switch... 28
23. Gambar 3.11 Konstruksi Pintu... 29
24. Gambar 3.12 Konstruksi Penggerak Pintu... 29
25. Gambar 4.1 Bentuk Fisik Model Pintu ... 33
26. Gambar 4.2 Konstruksi Pergerakan Pintu... 34
27. Gambar 4.3 Posisi Penggerak Pintu... 34
28. Gambar 4.4 Antarmuka software Pinnacle 52... 39
29. Gambar 4.5 Kondisi Awal Port Mikrokontroler ... 39
30. Gambar 4.6 Langkah ke-1... 40
31. Gambar 4.7 Langkah ke-2... 40
32. Gambar 4.8 Langkah ke-3... 40
33. Gambar 4.9 Jalannya Timer ... 41
34. Gambar 4.10 Langkah ke-4... 41
35. Gambar 4.11 Langkah ke-5... 42
36. Gambar 4.12 Langkah Terakhir... 42
BAB I
PENDAHULUAN
1.1
Latar belakang masalah
Pada Sistem Identifikasi Tiket Penumpang Bus Otomatis yang bertujuan
untuk membuat suatu perangkat yang dapat digunakan sebagai alat
pengidentifikasi tiket penumpang perlu adanya sebuah bagian keluaran yang
mendukungnya. Maka dari itu dibuat model keluaran berupa membuka dan
menutupnya pintu secara otomatis. Supaya dapat berjalan otomatis diperlukan
bantuan mikrokontroler. Mikrokontroler yang digunakan adalah AT89S8252
sebagai pemroses input / output serta pengendali gerak pintu otomatis. Dan
untuk penggeraknya menggunakan motor DC.
1.2
Tujuan dan Manfaat dari Penelitian
Tujuan yang akan dicapai dalam perancangan dan pembuatan alat ini
yaitu menjadikan buka-tutup pintu bus lebih mudah dan nyaman tanpa mengubah
fungsi utama dari pintu tersebut.
Manfaat yang dapat dicapai dalam penelitian ini yaitu menjadikan
mikrokontroler sebagai perangkat elektronis yang mudah diaplikasikan sebagai
pengendali pada berbagai kasus dan bidang kehidupan, memberikan kenyamanan
bagi pemakai pintu, dan tersedianya literatur tentang perancangan peralatan
otomatisasi.
1.3
Batasan Masalah
Dalam pembuatannya alat dibatasi dengan hal-hal sebagai berikut :
1. Alat dirancang dengan metode-metode perancangan menggunakan
mikrokontroler AT89S8252.
2. Menggunakan inframerah dan penerimanya berupa fototransistor sebagai
sensor benda.
3. Menggunakan motor DC sebagai penggerak
4. Alat yang dibuat dikhususkan hanya pintu depan saja untuk aplikasi pada
masuk dan belakang untuk keluar, sehingga mungkin kurang cocok untuk
diaplikasikan pada kendaraan lain atau diperlukan beberapa modifikasi
jika diterapkan pada kendaraan lain.
1.4
Metodologi Penelitian
Adapun langkah-langkah yang dipakai dalam penelitian adalah sebagai
berikut :
1. pencarian literatur dan bahan yang sesuai dan mencukupi, serta dasar teori
yang mencakup dan mendukung semua yang berhubungan dengan alat.
2. perancangan pembuatan alat secara sistematis, serta perancangan
pembuatan program.
3. pencarian komponen dan perakitan alat secara terstruktur dan pengetesan
alat.
4. pengambilan data melalui pengamatan.
5. pembuatan laporan dengan penyajian data melalui tabel dan gambar.
1.5
Sistematika Penulisan
Sistematika penulisan terdiri dari 5 bab, yaitu :
BAB I PENDAHULUAN
Bab ini berisi tentang latar belakang masalah, tujuan dan manfaat
penelitian, batasan masalah, metodologi penelitian, dan sistematika
penelitian.
BAB II DASAR TEORI
Bab ini berisi mengenai dasar teori yang mendukung perancangan dari
sistem, diantaranya mikrokontroler AT89S8252, motor DC, solenoid,
transistor, serta rangkaian pembanding.
BAB III PERANCANGAN
Bab ini berisi tentang perancangan perangkat keras, perancangan
perangkat lunak, rangkaian sensor, konstruksi peralatan, serta flowchart
perangkat lunak.
BAB IV PENGAMATAN DAN PEMBAHASAN
Bab ini berisi mengenai pengamatan hasil akhir beserta pembahasannya.
BAB V PENUTUP
BAB II
DASAR TEORI
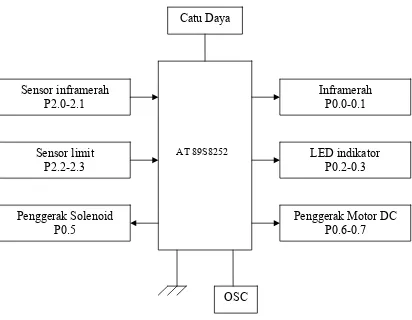
2.1 Diagram blok
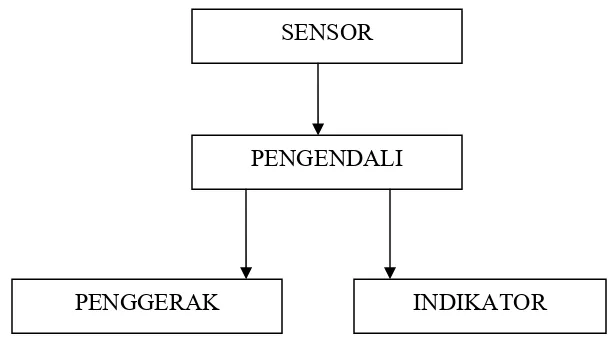
Urutan kerja dari proses buka tutup pintu otomatis dimulai dengan diberinya
masukan pada pengendali untuk membuka kunci pintu kemudian mengakses penggerak.
Kemudian pengendali akan melakukan prosesnya yang berfungsi mengendalikan
penggerak untuk memutar baik searah jarum jam atau kebalikan arah jarum jam yang
selanjutnya akan menggerakkan mekanik sehingga seolah olah pintu bisa membuka atau
menutup secara otomatis. Untuk lebih jelasnya tentang prinsip kerja dan
perancangannya, dapat dilihat pada bab selanjutnya. Diagram blok dari peralatan
otomatisasi pintu dapat dilihat pada gambar 2.1.
PENGENDALI SENSOR
PENGGERAK INDIKATOR
Gambar 2.1. Diagram blok peralatan otomatisasi pintu.
2.2 Mikrokontroler AT89S8252
Mikrokontroler AT89S8252 merupakan jenis mikrokontroler 8 bit yang dibuat
dengan teknologi non-volatile memory hasil dari pabrikan ATMEL. Mikrokontroler ini
dilengkapi dengan 8 Kbyte flash PEROM (Programmable and Erasable Read Only
Memory) serta ditambah dengan 2 Kbyte EEPROM (Electrically Erasable Programmable Read Only Memory) yang terintegrasi didalamnya.
Teknologi flash memory ini memungkinkan untuk penyimpanan program dalam
media penyimpanan internal, pembacaan program yang telah disimpan, penghapusan
maupun pemrograman kembali dengan lebih mudah dan cepat. Seperti pada keluarga
MCS-51 lainnya mikrokontroler ini juga dapat dikunci pengaksesan memorinya untuk
kepentingan keamanan dan kerahasiaan isi program. Dengan kemampuan tulis atau
hapus sebanyak kurang lebih seribu kali, membuat mikrokontroler ini fleksibel untuk
dipakai dalam berbagai sistem. Sedangkan teknologi EEPROM yang ditanamkan
didalamnya dapat digunakan untuk media penyimpanan data dengan kemampuan seratus
ribu kali tulis atau hapus.
2.2.1 Fasilitas yang dimiliki AT89S8252
Fasilitas yang dimiliki mikrokontroler ini antara lain 8 kbyte Downloadable flash
memory, 256 byte RAM internal, 2 kbyte EEPROM, 3 level program memory lock, 4
buah I/O port masing-masing 8 bit, 3 buah timer/counter 16 bit, SPI serial interface,
programmable UART, programmable watchdog timer, dual data pointer. Diagram blok bagian-bagian mikrokontroler AT89S8252 dan hubungan antar bagian secara terinci
dapat dilihat pada lampiran data sheet.
2.2.2 Organisasi memori AT89S8252
Memori mikrokontroler AT89S8252 dibagi menjadi memori program dan
memori data. Memori program atau ROM digunakan untuk menyimpan program yang
dibuat oleh pemrogram. Isi ROM dapat diubah oleh pemrogram dan tidak akan hilang
selama mikrokontroler mendapatkan sumber daya kecuali jika sudah dikunci
pengaksesannya. ROM menempati ruang dengan alamat heksadesimal 0000h-FFFFh dan
untuk AT89S8252 dengan kapasitas memori on-chip 8 kbyte menempati 0000h-1FF0h.
Sedangkan EEPROM menempati ruang dengan alamat 2000h-27F0h. Ruang sisanya
digunakan untuk ekspansi sebagai memori eksternal.
Memori data digunakan untuk menyimpan data yang diolah mikrokontroler
selama proses kerjanya berlangsung. Data ini akan hilang jika mikrokontroler tidak
mendapatkan sumber daya.
2.2.3 Register AT89S8252
Dalam keluarga mikrokontroler MCS 51, register ditempatkan secara terpisah.
Register PC ditempatkan dalam inti prosesor, register serba guna (R0-R7) di dalam ruang
2.2.3.1 Register Dasar
Mikrokontroler AT89S8252 juga memiliki register dasar atau register pokok
untuk keperluan penulisan program. Register-register tersebut adalah Program Counter
(PC), Accumulator (A), Stack Pointer (SP), dan Program Status Register. Sedangkan
register dasar yang menjadi ciri khas keluarga mikrokontroler MCS 51 adalah Register
B, Data Pointer High Byte (DPH) dan Data Pointer Low Byte (DPL).
Regiter B sebagai register 8 bit, bersama accumulator berfungsi dalam
menjalankan instruksi perkalian dan pembagian. Sedangkan register DPH dan DPL yang
masing-masing berkapasitas 8 bit, dapat digunakan sebagai dua register 8 bit atau
sebagai Data Pointer Register (DPTR) 16 bit.
2.2.3.2 Register Serba Guna
Register serba guna (General Purpose Register) berkapasitas 32 byte dan dibagi
dalam 4 bank register, masing-masing terdiri dari 8 register (R0-R7). Keempat register
tersebut tidak bisa digunakan secara bersamaan, namun bank register 0 aktif setelah
reset. Untuk memilih bank register yang digunakan, diatur dalam register Program
Status Word (PSW). Khusus untuk register R0 dan R1 dapat digunakan untuk
menampung alamat dalam mode indirect memory addressing.
2.2.3.3 Register Khusus (SFR)
Register ini untuk mengatur perilaku mikrokontroler yang berhubungan dengan
port paralel P0-P3 dan sarana I/O lainnya serta tidak untuk menyimpan data. Sebagian
register dasar diletakkan dalam SFR, seperti accumulator dan register B. register-register
dalam SFR antara lain :
a. Register penampung data masukan/keluaran yang berhubungan dengan port
paralel P0, P1, P2, dan P3.
b. TL0/TH0 (Timer 0 Low/High), TL1/TH1 (Timer 1 Low/High) yang
membentuk Timer 0 dan Timer 1 sebagai pencacah naik, dan juga bisa
dipakai sebagai sumber clock pencacah. Perilaku timer ini diatur melalui
register TMOD dan TCON.
c. TMOD (Timer Mode), merupakan register untuk mengendalikan kerja timer,
dan digunakan sebagai timer 16 bit, 13 bit atau dua buah timer 8 bit yang
terpisah pada masing-masing timer. Selain itu TMOD juga mengatur agar
proses pencacahan dapat dikendalikan dari luar dan dapat mendeteksi sinyal
dari luar IC AT89S8252.
d. TCON (Timer Control), untuk mengendalikan timer dalam memulai dan
menghentikan proses pencacahan, sekaligus mengawasi proses pencacahan
itu sendiri dan terjadinya overflow. Dalam register ini juga ada bit yang
mengatur permintaan interupsi dari INTO (pin 12) dan INTI (pin 13).
e. IE (Interrupt Enable), untuk mengatur agar interupsi aktif atau tidak aktif. f. IP (Interrupt Control), digunakan untuk mengatur prioritas dari masing -
masing sumber interupsi.
g. PCON (Power Control), untuk mengatur mode pemakaian daya oleh
mikrokontroler misalnya pada saat sistem dalam keadaan stand by. Daya
listrik yang digunakan sistem dapat direduksi sehingga menjadi hemat,
terutama sistem yang menggunakan baterai sebagai sumber daya listrik.
Selain register-register diatas AT89S8252 juga memiliki SFR tambahan meliputi
: T2CON(timer 2 register dengan alamat 0C8h), T2MOD(timer 2 mode dengan alamat
0C8h), WMCON(watchdog and memory control register dengan alamat 96h), SPCR(SPI
control register dengan alamat D5h), SPSR(SPI status register dengan alamat AAh),
SPDR(SPI data register dengan alamat 86h).
2.2.4 Register Timer/Counter
Mikrokontroler AT89S8252 mempunyai tiga register timer/counter 16 bit yaitu
timer 0, timer 1 dan timer2. Ketiganya dapat diatur untuk bekerja sebagai timer atau
counter, dan setiap timer 16 bit dapat diatur untuk bekerja dalam mode timer 16 bit, 13
bit, dan 8 bit auto-reload. Perilaku timer diatur oleh register TCON,T2CON,TMOD dan
T2MOD melalui pemrograman.
Pada mode 0, 1, dan 2, timer 0,1, dan timer 2 masing-masing bekerja sendiri,
artinya dapat terjadi pada timer 0 bekerja pada mode 1 dan timer 1 bekerja pada mode 2,
atau kombinasi lainnya sesuai dengan keperluan. Sedangkan pada mode 3, TL0, TH0,
TL1, dan TH1 digunakan secara bersama-sama untuk menyusun sistem timer yang
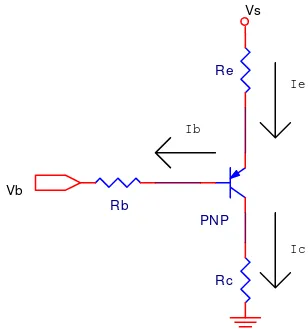
2.3 Transistor sebagai saklar
Transistor pada penerapannya dapat difungsikan sebagai saklar. Transistor ini
mampu bekerja pada dua keadaan, yakni saturasi sebagai kondisi ON (closed switch) dan
cut-off sebagai kondisi OFF (open switch). Keunggulan transistor sebagai saklar yakni
lebih baik dalam hal kecepatan penyaklaran dan dapat dilakukan secara otomatis dalam
perangkat elektronika.
Vs
Vb
PNP Rb
Re
Rc
Ib
Ie
Ic
Gambar 2.2 Rangkaian dasar transistor
Pada gambar 2.2, arus kolektor (Ic) menjadi arus saklar dan Vs menjadi tegangan saklar
sedangkan Vb menjadi tegangan yang mengendalikan penyaklaran tersebut. Kontrol
tegangan Vb tersebut memberikan dua keadaan, yakni bila tegangan Vb rendah maka
akan memberikan Ib ≠ 0 yang menyebabkan transistor dalam keadaan saturasi,
sedangkan bila tegangan Vb tinggi maka akan memberikan Ib = 0 yang menyebabkan
transistor dalam keadaan cut-off.
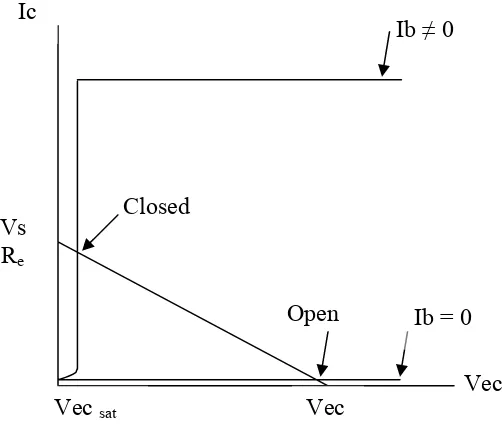
Vs Re
Ic
Ib ≠ 0
Vec Ib = 0 Open
Closed
Vec sat Vec
Gambar 2.3 Kurva tegangan-arus untuk transistor sebagai
saklar dengan garis beban
Ketika Vb bernilai rendah, Ie ≈ 0 menyebabkan Ve bernilai tinggi. Sedangkan ketika Vb
bernilai tinggi maka,
Ie ≈ Vs
Re (2.1)
menyebabkan Ve bernilai rendah. Hal ini dapat diperjelas seperti pada gambar 2.4
berikut :
t
0V
5V Vs
Vb
5V
Transistor sebagai saklar
0V
t
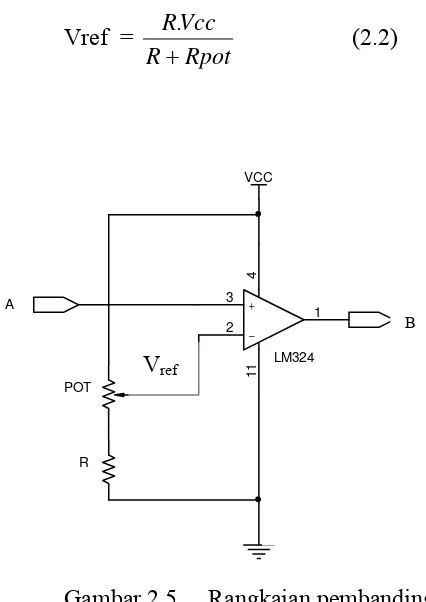
2.4 Rangkaian pembanding
Rangkaian pembanding merupakan rangkaian aplikasi dari OP AMP (operational
amplifier). Rangkaian pembanding digunakan untuk membandingkan tegangan masukan dengan tegangan acuan (referensi). Bila tegangan masukan lebih kecil (dianggap OFF)
dari tegangan acuan, maka OP AMP akan memberikan keluaran LOW (logika 0),
sedangkan bila tegangan masukan lebih tinggi (dianggap ON) dari tegangan acuan, maka
OP AMP memberikan sinyal keluaran HIGH (logika 1). Rangkaian pembanding dapat
dilihat pada gambar 2.5.
Rumus dasar untuk rangkaian pembanding adalah sebagai berikut :
Vref =
Rpot R
Vcc R
+
.
(2.2)
A +
-LM324 3
2
1
4
11
VCC
P0.7
Tegangan pada A dibandingkan dengan tegangan acuan yang dihubungkan ke kaki
inverting dari OP AMP. Apabila VA lebih kecil daripara VREF maka output OP AMP
akan 0V, demikian pula sebaliknya apabila VA lebih besar daripada VREF maka output
OP AMP akan menjadi VSAT.
POT
R
B
Vref
Gambar 2.5 Rangkaian pembanding
2.5 LED
(
Light Emiting Diode)
LED adalah salah satu alat optoelektronika yang dapat menghasilkan cahaya.
Dengan menggunakan unsur-unsur seperti galium, arsenat dan fosfor pabrik dapat
menghasilkan LED yang memancarkan cahaya merah, hijau, kuning, biru, jingga hingga
inframerah. Led membutuhkan tegangan antara 1,5 sampai 3 volt dan arus antara 10
sampai 30mA agar dapat menghasilkan cahaya yang cukup.
Dalam dasar teori ini LED digunakan sebagai indikator aktif tidaknya motor DC
yang dibangkitkan melalui mikrokontroler AT89S8252 secara langsung. Gambar 2.6
memperlihatkan rangkaian dasar LED dan rumus perhitungan pada arus pada LED :
VCC
R
LED
Vs
I
Gambar 2.6 Rangkaian dasar LED
Besar arus LED dapat dihitung yaitu :
I =
R V Vs− LED
(2.3)
Dengan :
I = arus LED
Vs = tegangan sumber
VLED = tegangan LED
R = resistansi sumber
2.6 LED Inframerah
Led inframerah adalah peralatan elektronik yang dapat menghasilkan cahaya
dapat ditangkap oleh penerima inframerah saja. LED inframerah banyak digunakan
sebagai komponen utama remote control. LED inframerah seperti halnya LED biasa
membutuhkan arus dan tegangan tertentu untuk menghasilkan cahaya inframerah yaitu
sekitar 1,5 sampai 3 volt untuk tegangan dan 10 sampai 30 mA untuk arusnya.
Rangkaian dasar LED inframerah ditunjukkan pada gambar 2.7 berikut ini:
VCC
Resistor
LED INFRAMERAH
Gambar 2.7 Rangkaian LED infrared
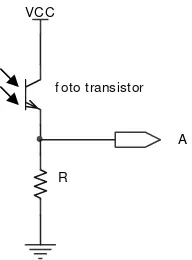
2.7 Phototransistor
Fototransistor merupakan salah satu detektor optis. Fototransistor hanya memiliki
2 buah pin yaitu pin kolektor dan pin emiter. Prinsip kerja dari fototransistor sama
halnya dengan transistor yaitu arus kolektor dikuatkan sebesar β (beta) kali dari arus
basis, yang menjadi perbedaannya arus basis pada phototransistor dihasilkan dari
intensitas cahaya yang diterima oleh detektor optis pada phototransistor.
Gambar 2.8 Rangkaian dasar foto transistor
f oto transistor
R
A VCC
2.8 Medan magnetik
Kekuatan dan arah dari medan magnetik di sekitar kawat berarus dinyatakan
dengan besaran magnetik atau lebih dikenal dengan induksi magnetik. Induksi magnetik
tersebut dapat dinyatakan dengan garis-garis induksi. Arah garis gaya magnetik dapat
dinyatakan dengan kaidah tangan kanan pertama yang berbunyi, “Bila kita menggenggam penghantar berarus dengan tangan kanan, sedemikian sehingga ibu jari menunjukkan arah arus listrik, maka arah lipatan keempat jari lainnya menyatakan arah putaran garis-garis gaya magnetik.”
2.8.1 Induksi magnetik pada solenoid
Kumparan solenoidal adalah deretan seri lilitan kawat melingkar yang pada saat
dialiri arus listrik akan menjadi sumber medan magnet seperti yang dihasilkan oleh
batang magnet. Gambar 2.9 memperlihatkan bentuk dari solenoid berinti bahan
ferromagnetik yang mampu menambah kuat medan magnet dengan pola lilitan saling
berdekatan.
Sebuah solenoid dengan panjang (L) dan banyak lilitan (N) dialiri arus (i) akan
menghasilkan induksi magnetik (B) sesuai dengan rumus di bawah ini :
inti ferromagnetik
i
Gambar 2.9. Solenoid berinti bahan ferromagnetik
Pada pusat solenoid :
B =
L N i
0
μ
(2.4)
Pada ujung solenoid :
B =
L N i
2 0
μ
(2.5)
dengan :
B = besar induksi magnetik (Wb m-2 = Tesla),
N = banyak lilitan solenoid,
i = kuat arus (A),
L = panjang solenoid (m),
2.8.2 Gaya Lorentz
Jika sebuah penghantar yang dialiri arus listrik berada dalam medan magnet,
maka penghantar tersebut digerakan oleh sebuah gaya yang disebut gaya Lorentz. Gaya
Lorentz adalah gaya yang timbul pada sebuah kawat penghantar berarus pada suatu
medan magnetik. Besarnya gaya dirumuskan dengan persamaan :
F = B I L sin θ (2.6)
Keterangan :
F = Gaya Lorentz (Newton[N])
B = Medan Magnet (Weber[w])
I = Arus Listrik (Ampere[A])
L = Panjang koil (Meter[m])
θ = Sudut antara arah arus i dan arah medan magnetik B.
Arah gaya Lorentz dapat dinyatakan dengan kaidah tangan kanan kedua yang berbunyi,
“Bila tangan kanan dibuka dengan ibu jari menunjukkan arah arus i dan keempat jari lain yang dirapatkan menunjukkan arah medan magnetik B maka arah gaya Lorentz ke luar tegak lurus dari telapak tangan.” Hal ini memberi makna bahwa arah gaya Lorentz tegak lurus dengan arah medan magnetik dan arah arus listrik. Gambar 2.10
memperlihatkan arah gaya Lorentz.
B F
i
θ
Gambar 2.10. Arah gaya Lorentz terhadap arah medan magnet B dan arah arus i.
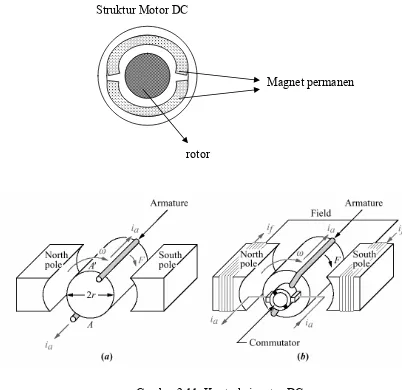
2.9
Motor
DC
Motor adalah peralatan listrik yang menghasilkan gerak mekanis dengan prinsip
elektromagnetis. Salah satu tipe yang sering dijumpai adalah motor arus searah atau
motor DC (direct current). Motor DC merupakan perubah gaya listrik menjadi gaya
gerak yang berupa putaran. Motor DC membutuhkan tegangan DC untuk bekerja. Arah
putarannya dapat diatur dengan merubah kutub positif-negatifnya atau dengan merubah
arah arusnya. Bila arah putarnya CW dengan merubah arah arusnya maka arah putarnya
akan berubah menjadi CCW. Untuk kecepatan putarnya semakin besar arus yang
diberikan maka akan semakin kencang pula putarannya.
Prinsip kerja motor DC didasarkan pada hukum Lorentz seperti yang telah
dijelaskan pada sub bab diatas.
Magnet permanen
rotor Struktur Motor DC
Gambar 2.11 Kontruksi motor DC
Keuntungan pemakaian motor DC :
- mudah untuk mengontrol kecepatan
- mudah untuk mengontrol torsi
- mudah untuk mengontrol arah putar
Kerugian pemakaian motor DC :
- tidak dapat menghasilkan pergerakan yang presisi
2.10 Gerak rotasi
Apabila sebuah benda tegak yang memiliki bentuk lingkaran berputar pada
porosnya, maka jika dihubungkan dengan bentuk lingkaran lain secara langsung maka
arah putarannya akan saling berkebalikan.
Hubungan perpindahan gerak rotasi antar dua buah benda dapat diperjelas dengan
gambar 2.12.
Gerak rotasi 1
Gerak rotasi 2
Gambar 2.12 Perpaduan antara dua buahgerak rotasi
BAB III
PERANCANGAN
Perancangan peralatan ini menjadi hal terpenting dalam pembuatan peralatan baik
perangkat keras maupun perangkat lunak karena perancangan merupakan dasar kerja dari
pembuatan alat. Perancangan peralatan yang dibuat meliputi penyusunan diagram blok,
rancangan perangkat keras, konstruksi peralatan, dan bagan alir program (flow chart).
3.1 Perancangan perangkat keras
MIKROKONTROLER LIMIT SENSOR
SENSOR INFRARED
DRIVER/ PENGGERAK INDIKATOR
Gambar 3.1. Diagram blok otomatisasi pintu berbasis
mikrokontroler AT89S8252 2
2 2
2
SOLENOID
Penjelasan tentang diagram blok peralatan otomatisasi pintu adalah sebagai berikut :
1. LED inframerah
LED inframerah digunakan sebagai sumber cahaya untuk memberi masukan pada
sensor. Untuk mengaktifkannya langsung melalui mikrokontroler.
2. Sensor inframerah
Sensor yang digunakan berupa foto transistor. Foto transistor ini akan
mendeteksi adanya tembakan cahaya inframerah yang berfungsi mengetahui ada
diartikan ada benda/sesuatu dan jika tidak maka diartikan sebaliknya. Hal ini memberi
pengertian sensor hanya aktif jika menerima cahaya dari LED inframerah saja. Untuk itu
penempatan sensor untuk dapat menangkap cahaya inframerah menjadi hal yang penting.
3. Limit sensor
Sensor limit switch digunakan untuk penentu batas pintu membuka maksimal dan
batas pintu tertutup rapat.
4. Mikrokontroler
Mikrokontroler digunakan sebagai pengatur kerja motor, solenoid dan pengatur
tampilan indikator, pengatur lamanya pintu terbuka dengan memanfaatkan fasilitas timer
pada mikrokontroler, dan sebagai pemroses masukan dari sensor..
5. Penggerak
Motor DC digunakan sebagai penggerak pada mekanik untuk melakukan proses
membuka atau menutup pintu. Jika motor berputar CW (clock wise) maka mekanik akan
menjalankan proses membuka pintu, sedangkan jika motor berputar CCW (counter clock
wise) maka mekanik akan menjalankan proses menutup pintu.
6. Solenoid
Solenoid digunakan sebagai penggerak mekanik untuk penguncian pintu.
7. Indikator
Indikator yang digunakan adalah LED. Indikator hanya untuk menegaskan pada
saat pintu membuka atau menutup maka LED akan menyala.
3.1.1 Perancangan otomatisasi pintu
Perancangan bentuk perangkat keras otomatisasi pintu tampak pada gambar 3.2.
Otomatisasi pintu ini memiliki mekanisme atau cara kerja yang dapat digambarkan
dengan langkah-langkah dibawah ini.
Urutan kerjanya yaitu :
1. Catu daya dihidupkan mikrokontroler mulai menjalankan program dan
mengolah data.
2. Mikrokontroler memberikan sinyal pada transistor untuk mengaktifkan
solenoid sehingga kunci pintu terbuka.
3. Kemudian mikrokontroler memberikan arus pada transistor sehingga
mengaktifkan motor, motor menggerakkan mekanik sehingga pintu terbuka,
output mikrokontroler memberikan sinyal rendah sehingga LED indikator menyala.
4. Sensor batas pintu maksimal tercapai, mikrokontroler memberikan sinyal
keluaran sehingga indikator LED berhenti menyala.
5. Mikrokontroler mengolah data dan mengaktifkan timer pertama.
6. LED inframerah menembakkan cahaya ke sensor.
7. Sensor akan aktif (ON) jika terkena cahaya dari LED inframerah.
8. Sinyal keluaran sensor diolah komparator agar dapat menghasilkan sinyal
keluaran bertegangan +5v (logika 1) atau 0v (logika 0).
9. Mikrokontroler menerima sinyal dari comparator. Keluaran komparator
menghasilkan sinyal rendah (logika 0) jika sensor terkena cahaya dan sinyal
tinggi (logika 1) jika sensor tidak terkena cahaya. Mikrokontroler mengolah
data dan mengaktifkan timer kedua jika ada sinyal rendah.
10. Mikrokontroler menerima sinyal tinggi. Mikrokontroler memberikan arus
pada transistor sehingga mengaktifkan motor, motor menggerakkan mekanik
sehingga pintu tertutup, keluaran mikrokontroler mengeluarkan sinyal rendah
sehingga LED indikator menyala.
11. Sensor batas pintu tertutup rapat tercapai, mikrokontroler memberikan sinyal
keluaran sehingga indikator LED berhenti menyala.
12. Mikrokontroler menghentikan pemberian arus pada transistor sehingga
pengunci pintu aktif kembali.
3.1.2 Mikrokontroler AT89S8252
Perancangan ini menggunakan mikrokontroler AT89S8252 buatan ATMEL
karena mikrokontroler ini mudah untuk diterapkan pada berbagai perancangan alat
elektronika. Hal lain yang mendukung adalah port masukan–keluaran yang dapat
digunakan adalah sebanyak 4 buah, dan mudah men-download program maupun data .
Mikrokontroler AT89S8252 memiliki 4 port yang dapat dipakai untuk input
maupun output. Port yang dipakai untuk peralatan ini dapat dilihat pada tabel 3.1.
Penggunaan port mikrokontroler juga dapat dijelaskan dengan diagram blok yang dapat
dilihat pada gambar 3.3.
Tabel 3.1 Penggunaan port pada mikrokontroler
Port Fungsi Keterangan
P0.0-0.1 Pembangkit Inframerah Keluaran
P0.2-0.3 LED indikator Keluaran
P0.6-0.7 Penggerak Motor DC Keluaran
P2.0-2.1 Sensor Inframerah Masukan
P2.2-2.3 Sensor limit Masukan
P0.5 Penggerak Solenoid Keluaran
Kondisi pintu III Kondisi pintu I Kondisi pintu II
Pola perubahan gerakan pintu dari kondisi I ke III kemudian kembali ke kondisi II dan I.
Gambar 3.2 Perancangan otomatisasi pintu.
AT 89S8252
OSC
Inframerah P0.0-0.1
Gambar 3.3. Diagram blok penggunaan port mikrokontroler AT89S8252 pada rancangan otomatisasi pintu
LED indikator P0.2-0.3
Penggerak Motor DC P0.6-0.7 Sensor inframerah
P2.0-2.1
Sensor limit P2.2-2.3
Penggerak Solenoid P0.5
Catu Daya
3.1.3 LED Infrared
Led inframerah digunakan untuk memancarkan cahaya inframerah untuk
ditangkap oleh sensor sebagai detektor benda. Jenis LED inframerah yang digunakan
yaitu LED yang biasa dipakai pada remote control. Panjang gelombang berkisar 880 nm
dengan output maksimum 32mW. Aktivasi dari LED inframerah dilakukan oleh
mikrokontroler melalui pemberian keluaran sinyal rendah.
Gambar 3.4. Rangkaian LED infrared
Pada perancangan rangkaian menggunakan inframerah dengan tipe QED 233.
LED inframerah ini dari datasheet mempunyai karakteristik dengan arus maju (ID)
maksimal sebesar 100 mA, dengan tegangan maju 1,6 V. Sehingga dapat diperoleh niai
Rd minimum yang diijinkan, yaitu :
Ω = × −
= − 34
10 100 6 , 1 5 3 d R
Pada perancangan ini digunakan tegangan dari catu daya sebesar 5 Volt dan nilai
ID yang dipakai pada perancangan ini sebesar 34mA. Dengan jarak antara LED
inframerahdan fototransistor + 12 cm digunakan arus ID 34 mA karena intensitas cahaya
inframerah yang dibutuhkan cukup besar untuk mengaktifkan fototransistor. Untuk
memperoleh nilai resistor yang akan digunakan menggunakan perhitungan :
1000 / 34 ) 6 , 1 5 ( − = d R
Rd= 100Ω
Sehingga besarnya nilai R1 dan R2 adalah sebesar 100Ω.
3.1.4 Sensor
Sensor yang digunakan pada otomatisasi pintu ini adalah foto transistor. Foto
transistor ini berjumlah 2 buah sesuai dengan jumlah LED pemancar inframerah.
Rangkaian dasar sensor foto transistor dapat dilihat pada gambar 3.5. Pada gambar
tersebut, foto transistor dirancang agar bila ada cahaya jatuh di kaki basis maka transistor
ON dan berlaku sebaliknya, apabila tidak ada cahaya jatuh di kaki basis maka transistor
OFF. Kondisi ini disebut terhalang OFF.
Fototransistor yang digunakan pada perancangan ini adalah fototransistor tipe
UT6W95-AE-0125 (NPN). Dari datasheet diperoleh besarnya arus yang dibutuhkan
fototransistor pada keadaan ON adalah Ic = 0,1mA, VCESAT = 0,4 V. Pada perancangan
ini digunakan Ic = 500μA, sehingga dapat diketahui nilai RC :
Ω ≅ Ω = × −
= − K
RC 9200 10
10 500 4 , 0 5 6
Karena nilai resistor 9200Ω tidak terdapat di pasaran, maka dipilih nilai yang mendekati
9200Ω, yaitu 10KΩ.
Gambar 3.5. Rangkaian dasar foto transistor terhalang OFF
f oto transistor
R
A VCC
Rangkaian gambar 3.5 kemudian diteruskan ke rangkaian pembanding yang
menggunakan OP AMP. Rangkaian pembanding akan membandingkan tegangan
keluaran foto transistor dengan tegangan acuan. Bila tegangan output foto transistor lebih
kecil (dianggap OFF) dari tegangan acuan, maka OP AMP akan memberikan output
LOW (logika 0), sedangkan bila tegangan output foto transistor lebih tinggi (dianggap
ON) dari tegangan acuan, maka OP AMP memberikan sinyal HIGH (logika 1).
Rangkaian pembanding dapat dilihat pada gambar 3.6.
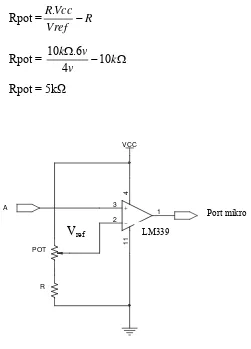
Dengan memberikan nilai R pada gambar 3.6 sebesar 10kΩ dan Vcc sebesar 6V,
maka untuk mendapatkan tegangan referensi sebesar 4V, besar hambatan pada potensio
adalah sebagai berikut :
Vref =
Rpot = R Vref
Vcc R
−
.
Rpot = Ω − kΩ
v v k
10 4
6 . 10
Rpot = 5kΩ
A +
-LM324 3
2
1
4
11
VCC
P0.7
POT
R
Gambar 3.6. Rangkaian pembanding
Port mikro
Vref LM339
Tegangan pada A, yakni VE pada foto transistor, dibandingkan dengan tegangan
acuan yang dihubungkan ke kaki inverting dari LM339. Apabila VA lebih kecil daripara
VREF maka output OPAMP akan 0V, demikian pula sebaliknya apabila VA lebih besar
daripada VREF maka output OPAMP akan menjadi VSAT.
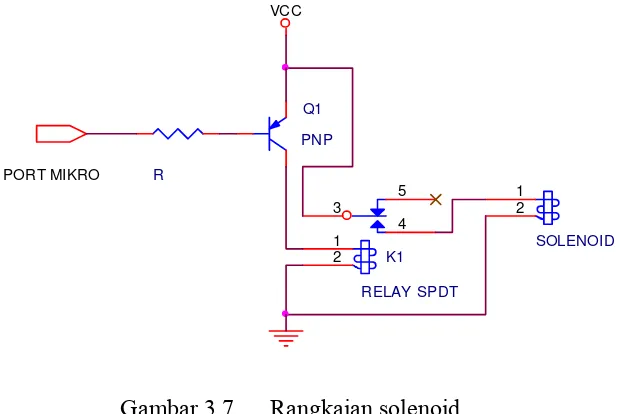
3.1.5 Solenoid
Pada pintu dipasang pengunci yang mempergunakan penggerak berupa solenoid
yang dikendalikan secara langsung oleh mikrokontroler. Karena solenoid membutuhkan
arus yang cukup besar untuk pengaktifannya maka mempergunakan relay sebagai
penghubung mikrokontroler dengan solenoid. Gambar rangkaian solenoid ditunjukkan
pada ganbar 3.7 sebagai berikut:
VCC
PORT MIKRO
K1
RELAY SPDT 3
5
4 1 2 Q1
PNP
SOLENOID 1
2 R
Gambar 3.7 Rangkaian solenoid
Dengan keluaran dari mikrokontroler untuk logika high sebesar 5 volt (Vp) dan
logika low sebesar 0 volt, besarnya arus keluaran dari mikrokontroler (Ib) sebesar 1,6
mA, serta kebutuhan tegangan relay sebesar 11-12V maka penghitungan besarnya
hambatan R pada basis transistor ditunjukkan sebagai berikut :
Vcc - Veb - (Ib.R) – Vp = 0
(Ib.R) = Vcc – Veb – Vp
(1,6/1000) R = 12 -0,7 – 5
R = 6,3 / (1,6/1000)
R = 6300 / 1,6
R = 3937,5 Ω
Untuk keadaan sebenarnya dipakai R yang mendekati yaitu sebesar 4k2 Ω.
3.1.6 Indikator
Untuk memberikan tampilan pada saat pintu membuka dan menutup digunakan
LED yang berwarna biru dan merah. Pada saat pintu membuka indikator LED berwarna
biru akan menyala sedangkan pada saat pintu menutup indikator LED berwarna merah
yang menyala. Aktivasinya dilakukan langsung melalui mikrokontroler dengan
Gambar 3.8. Rangkaian LED indikator
Pada perancangan rangkaian menggunakan LED dengan karakteristik dengan
arus maju (ID) maksimal sebesar 100 mA, dengan tegangan maju 1,6 V seperti yang
sidebutkan pada datasheet. Sehingga dapat diperoleh niai Rd minimum yang diijinkan,
yaitu :
Ω = × −
= − 34
10 100 6 , 1 5 3 d R
Pada perancangan ini digunakan tegangan dari catu daya sebesar 5 Volt dan nilai
ID yang dipakai pada perancangan ini sebesar 34mA untuk memperoleh cahaya yang
cukup terang. Untuk memperoleh nilai resistor yang akan digunakan menggunakan
perhitungan : 1000 / 34 ) 6 , 1 5 ( − = d R
Rd = 100Ω
Sehingga besarnya nilai R1 dan R2 adalah sebesar 100Ω.
3.1.7 Penggerak
Penggerak yang digunakan adalah motor DC dengan konfigurasi gabungan dua
buah transistor yang mengatur pensaklaran relay. Dengan rangkaian ini akan
memudahkan untuk membalik arah putaran motor sehingga mudah juga untuk perubahan
pintu membuka dan menutup. Gambar dari konfigurasi rangkaiannya ditunjukkan
seperti pada gambar 3.9 dibawah ini.
VCC PORT PORT MOTOR DC 1 2 Q1 PNP Q2 PNP K1
RELAY DPDT 3 4 5 6 8 7 1 2 K2
RELAY DPDT 3 4 5 6 8 7 1 2 R1 R2
Gambar 3.9 Rangkaian driver motor
Mikrokontroler digunakan sebagai pengatur motor tersebut agar motor dapat
berputar sesuai keinginan sehingga mekanik bergerak membuka/menutup pintu.
Mikrokontroler akan mengaktifkan transistor Q1 untuk memutar motor ke arah CW
sehingga pintu membuka, selanjutnya mikrokontroler akan mengaktifkan transistor Q2
untuk memutar motor ke arah CCW sehingga pintu menutup, sedangkan untuk
menghentikan putaran motor mikrokontroler akan menonaktifkan kedua transistor.
Motor yang dipakai adalah motor DC dengan kebutuhan tegangan antara 6 –
13V. Dengan keluaran dari mikrokontroler untuk logika high sebesar 5 volt (Vp) dan
logika low sebesar 0 volt, besarnya arus keluaran dari mikrokontroler (Ib) sebesar 1,6
mA, serta kebutuhan tegangan relay sebesar 11-12V maka penghitungan besarnya
hambatan R pada basis kedua transistor ditunjukkan sebagai berikut :
Vcc - Veb - (Ib.R) – Vp = 0
(Ib.R) = Vcc – Veb – Vp
(1,6/1000) R = 12 -0,7 – 5
R = 6,3 / (1,6/1000)
R = 6300 / 1,6
R = 3937,5 Ω
Untuk keadaan sebenarnya dipakai R yang mendekati yaitu sebesar 4k2 Ω. Sehingga
3.1.8
Sensor limit
Untuk menentukan batas maksimum pintu membuka menggunakan sensor limit
switch demikian juga untuk menentukan batas pintu tertutup rapat. Hanya pada saat
pintu benar-benar terbuka limit switch pertama akan tersambung dan hanya pada saat
pintu benar-benar tertutup rapat limit swicth kedua akan tersambung. Gambar rangkaian
masing-masing sensor limit ditunjukkan pada gambar 3.10 dibawah ini.
Gambar 3.10 Rangkaian sensor limit switch
3.2
Konstruksi Peralatan
Model pintu serta tata letak sensor dan pengunci dibuat dengan konstruksi dan
ukuran sebagaimana ditunjukkan pada gambar 3.11:
30 cm
12 cm
pengunci
sensor
sensor
infrared
infrared
Gambar 3.11 Konstruksi pintu.
Sistem kerja dari mekanik diatur oleh motor untuk menghasilkan gerakan berputar
kiri dan kanan sehingga membuat gerakan menggeser pintu kesamping. Untuk membuka
pintu, motor akan berotasi ke arah CW yang kemudian dari rotasi motor ini akan
memberikan gaya gerak pada mekanik, gaya tersebut menghasilkan gaya dorong
terhadap pintu dari dalam ke arah luar dengan metode pergeseran. Untuk menutup pintu,
motor akan berotasi ke arah CCW yang kemudian juga akan memberikan gaya gerak
pada mekanik untuk menghasilkan gaya tarik terhadap pintu dari arah luar ke dalam.
Gerak rotasi
pintu poros
Penggabungan antara dua buah gaya rotasi mempermudah dalam perancangan
penggerak, untuk mendorong dan menarik pintu dilakukan oleh gigi penggerak yang
merubah gerak rotasi motor menjadi gerak translasi.
Mikrokontroler digunakan sebagai pewaktu lamanya pintu membuka. Lamanya
pintu membuka adalah selama 10 detik namun apabila mikrokontroler menerima
masukan dari sensor bahwa ada sesuatu yang menghalangi pintu maka timer kedua akan
dijalankan sehingga pintu tetap terbuka selama 1 detik, tetapi jika mikrokontroler tetap
menerima masukan dari sensor bahwa ada sesuatu yang menghalangi pintu maka timer
kedua akan dijalankan kembali demikian seterusnya sampai tidak ada yang menghalangi
pintu.
Mikrokontroler juga memiliki fungsi lain untuk mengatur indikator LED
sehingga sesuai dengan kerja motor DC.
3.3 Diagram alir
Diagram alir dipakai untuk memudahkan dalam perancangan perangkat lunak.
Diagram alir ini dijadikan sebagai pedoman langkah-langkah kerja pada perancangan
perangkat lunak. Sebelum membuat diagram alir, urutan kerja otomatisasi pintu harus
ditentukan terlebih dulu mulai dari pengecekan data, waktu sampai dengan tahap
menampilkan.
Berikut adalah urutan jalannya otomatisasi pintu :
1. Inisialisasi data dan port kemudian pengecekan data penumpang.
2. Apabila data cocok maka proses selanjutnya siap dijalankan jika tidak maka
proses dihentikan.
3. Jika data penumpang benar proses selanjutnya adalah dibukanya pengunci
pintu.
4. Setelah terbuka maka motor siap berputar ke arah CW.
5. Pintu mulai bergerak membuka dan indikator menyala.
6. Pintu mencapai batas maksimal membuka dan indikator dipadamkan.
7. Waktu tunggu mulai dijalankan.
8. Sensor tidak mendeteksi adanya cahaya inframerah yang mengenai foto
transistor.
9. Waktu tunggu dijalankan kembali.
10. Sensor mendeteksi adanya cahaya inframerah yang mengenai foto transistor.
11. Motor berputar ke arah CCW sehingga pintu mulai bergerak menutup dan
indikator menyala.
12. Pintu mencapai batas dan indikator padam.
13. Pengunci pintu diaktifkan.
Mulai
Inisialisasi data dan port
Batas sensor pintu I?
tidak ya
Putar Motor ke arah CW dan nyalakan indikator
ya
Hentikan motor dan padamkan indikator Tunggu tidak data penumpang cocok? A A
Buka kunci pintu
Sensor terhalang ? tidak ya Tunggu Sensor terhalang ? ya tidak
Putar motor CCW dan nyalakan indikator
Batas sensor pintu II?
ya
Hentikan motor dan padamkan indikator
selesai
tidak
Kunci pintu
BAB IV
PENGAMATAN DAN PEMBAHASAN
Pada bab ini berisi mengenai hasil pengamatan dari alat yang sudah dibuat untuk kemudian dibahas sesuai dasar teori yang berlaku. Hasil pengamatan akan meliputi besar pemakaian tegangan dari alat tersebut, besarnya arus pada beberapa bagian dan perilaku gerakan pintu.
Bentuk fisik dari model pintu yang telah dibuat diperlihatkan dalam gambar 4.1 dibawah ini dengan ukuran lebar 12 cm dan tinggi 30 cm. Secara fisik dimensi model pintu dibuat dengan ukuran kecil tidak sesuai dengan ukuran pintu bus sesungguhnya melainkan dengan skala perbandingan 1 : 7, dikarenakan untuk mempermudah pembuatan dan pemasangan penggeraknya serta kesesuaian dengan perangkat keseluruhan dalam sistem identifikasi tiket penumpang otomatis.
Gambar 4.1 Bentuk fisik model pintu
(a) (b) (c)
Gambar 4.2 Konstruksi pergerakan pintu (a) Kondisi tertutup
(b) Kondisi setengah terbuka (c) Kondisi terbuka penuh
Posisi penggerak pintu diletakkan berdekatan dengan poros penggerak utama yaitu pada ujung bagian atas poros penggerak. Posisi penggerak dapat diperlihatkan pada gambar 4.3 dengan hubungan antar gear motor penggerak dan gear poros secara langsung.
Gambar 4.3 Posisi penggerak pintu
Pembuka dan penutup pintu bus memiliki beberapa rangkaian utama. Bagian inilah yang menjadikan model pintu dapat bergerak secara lancar tahap demi tahap. Bagian utama dari pembuka dan penutup pintu bus dapat dilihat pada tabel 4.1.
Tabel 4.1 Bagian utama pada pembuka dan penutup pintu bus otomatis.
Bagian utama Komponen utama
Rangkaian mikrokontroler AT89s8252, kristal 11, 0592MHz Rangkaian sensor Fototransistor, LM339
Rangkaian penggerak dan pengunci Motor DC, BD140, relay12V, solenoid
4.1
Pengamatan terhadap tegangan keluaran pada catu daya
Catu daya diperlukan untuk memberikan kebutuhan rangkaian akan tegangan serta arus listrik. Catu daya yang tersedia ada 2 jenis tegangan keluran. Pengamatan terhadap tegangan keluaran pada masing-masing sumber dapat dilihat dalam tabel 4.2, pada pengamatan tersebut tegangan keluaran catu daya sudah seperti yang diharapkan.
Tabel 4.2 Pengamatan catu daya
Catu daya Tegangan keluaran
+5V 5,10 V
+12V 11,70 V
Dengan besarnya tegangan catu daya yang disebutkan pada tabel 4.2 diatas maka untuk mikrokontroler dengan Vcc sebesar 5,1V seperti yang disebutkan perumusannya pada datasheet besarnya tegangan minimal mikrokontroler untuk level low adalah -0,5V dan tegangan maksimalnya adalah (5,1x 0,2) – 0,1 = 0,92V , sedangkan untuk level high besar tegangan minimalnya adalah (5,1 x 0,2) + 0,9 = 1,92V dan tegangan maksimalnya adalah 5,1 + 0,5 = 5,6V.
4.2
Pengamatan sensor
Tabel 4.3 Pengamatan level tegangan sensor
Tegangan pada pembanding
Kondisi Sensor 1 Sensor 2
Tidak Terhalang 0,69 V 0,63 V
Terhalang 3,82 V 3,82 V
Pengamatan level tegangan dapat dilakukan dengan mengukur tegangan keluaran LM339 terhadap ground yang kemudian menuju kaki mikrokontroler yang berasal dari kaki emiter pada fototransistor. Pengamatan dilakukan pada titik tersebut karena level tegangan keluaran pada LM339 secara langsung dihubungkan pada kaki mikrokontroler yang berfungsi sebagai masukan. Dari pengamatan tegangan pada pembanding tegangan saat tidak terhalang digolongkan sebagai logika low karena batas logika low mikrokontroler -0,5V sampai 0,92V dan tegangan saat terhalang dapat digolongkan logika high karena batas logika high mikrokontroler 1,92V sampai 5,6V sehingga mikrokontroler sudah dapat membedakannya menjadi logika 0 dan logika 1.
Tingkat kepekaan sensor meskipun sudah mempergunakan sumber inframerah sebagai pemancar cahayanya tetapi masih terpengaruh dengan kondisi cahaya disekitarnya. Ini lebih baik daripada pemakaian led biasa sebagai sumber cahaya, tetapi pada saat penempatannya sangat memerlukan kejelian karena cahaya dari led inframerah lebih terfokus sehingga jika tergeser sedikit saja maka tidak akan terdeteksi. Pada penempatan sejauh 12 cm yaitu selebar ukuran model pintu sensor fototransistor masih dapat mendeteksi pancaran cahaya dari led inframerah tetapi penempatannya harus terfokus.
Untuk melihat perubahan kondisi tegangan pada sensor maka dilakukan pengamatan dengan empat perbedaan keadaan intensitas cahaya lingkungan sekitar dan diperoleh hasil yang disebutkan pada tabel 4.4.
Tabel 4.4 Pengamatan perubahan tegangan sensor Kondisi lingkungan Tegangan sensor saat
terhalang
Tegangan sensor saat tidak terhalang
Terang 3,62V 3,01V
Agak Terang 2,93V 2,03V
Agak Gelap 2,10V 1,6V
Gelap 1,81V 0,45V
Dengan adanya perubahan-perubahan tegangan sensor yang disebutkan dalam tabel 4.4 maka perlu juga perubahan tegangan referensi untuk setiap kondisi dengan menyesuaikan tegangan sensor yaitu berada diantara tegangan saat terhalang dan tidak terhalang.
4.3
Pengamatan pada motor
Pada motor penggerak dapat dilakukan besarnya konsumsi tegangan yang dibutuhkan pada saat bekerja. Hasil pengamatannya ditunjukkan oleh tabel 4.5 dibawah ini.
Tabel 4.5 Pengamatan tegangan motor
Kondisi Besarnya tegangan pada motor
Saat pintu membuka 11,60 V
Saat pintu menutup 11,60 V
Saat kondisi tidak aktif 0 V
Dengan tegangan sebesar 11,6 V motor sudah dapat menggerakkan pintu untuk membuka maupun menutup.
penggerak mengerjakan tugas perubahan kondisi. Hasil pengamatan waktu yang dibutuhkan dapat dilihat pada tabel 4.6 dibawah ini.
Tabel 4.6 Pengamatan waktu perubahan kondisi
Parameter Waktu Lama perubahan kondisi tertutup sampai terbuka 1,23 detik
Lama perubahan kondisi terbuka sampai tertutup 1,35 detik
Dari pengamatan yang tersebut diatas lamanya waktu sudah sangat memungkinkan sehingga penumpang tidak perlu menunggu terlalu lama untuk tiap-tiap perubahan kondisi.
4.5
Pengamatan pewaktuan lamanya pintu terbuka
Seperti halnya pada pengamatan pewaktuan perubahan kondisi, lamanya waktu pintu terbuka dapat mempergunakan stopwatch sebagai medianya. Pengamatan waktu pintu terbuka dapat diartikan sebagai lamanya pewaktuan yang dilakukan mikrokontroler sebagai pengatur waktu utama tergantung dari kondisi sensor. Untuk pengamatan ini perlu dilakukan percobaan dengan mengubah-ubah kondisi sensor dan diulang sebanyak 3 kali kemudian di ambil rata-ratanya. Hasil pengamatan dapat diperlihatkan dalam tabel 4.7 dibawah ini dengan keterangan lebih lanjut.
Tabel 4.7 Pengamatan pewaktuan mikrokontroler
Parameter Waktu
Lama waktu sensor tak terhalang 12,24 detik Lama waktu sensor terhalang 1 kali 13,32 detik Lama waktu sensor terhalang 2 kali 14,40 detik Lama waktu sensor terhalang 3 kali 15,48 detik
Lamanya waktu terbukanya pintu tergantung dari kondisi sensor untuk itu dilakukan percobaan dengan beberapa kondisi yang dapat mewakili masing-masing perubahan. Hasil pengamatannya menunjukkan lamanya proses pewaktuan agak meleset dari pewaktuan yang diinginkan tetapi masih dapat ditoleransi.
4.6
Pengamatan kerja mikrokontroler berdasarkan simulasi
Dengan mempergunakan software Pinnacle 52 dapat disimulasikan cara kerja mikrokontroler terhadap program yang diisikan/didownload didalamnya. Dengan isi program yang terdapat dalam lampiran didapatkan hasilnya sudah sesuai dengan yang diharapkan.
Tampilan GUI software Pinnacle 52 program pembuka dan penutup pintu otomatis dapat dilihat pada gambar 4.4 berikut :
Gambar 4.4 Antarmuka software Pinnacle 52
Kondisi default masing-masing port mikrokontroler adalah 1. Hal ini ditunjukkan seperti pada gambar 4.5 berikut :
Setelah program dijalankan keadaan solenoid pengunci pintu berada pada posisi 0 yaitu terkunci pada program ditunjukkan oleh output latch port 2.4 seperti pada gambar 4.6,
Gambar 4.6 Langkah ke-1
kemudian setelah ada instruksi yang menyatakan bahwa data pembandingan cocok maka solenoid tidak terkunci lagi dan pintu akan membuka yang ditunjukkan oleh output latch port 0.4 dan 0.7. seperti pada gambar 4.7
Gambar 4.7 Langkah ke-2
Pada waktu pintu membuka setelah mencapai batas maksimalnya akan mengaktifkan sensor yang ditunjukkan oleh input port 2.2, seperti ditunjukkan pada gambar 4.8
Gambar 4.8 Langkah ke-3
dan kemudian menunggu selama kurang lebih 10 detik timer berjalan apabila deteksi penumpang menyatakan ada penumpang di pintu maka sensor terhalang yang ditunjukkan oleh input port 2.1 dan port 2.0 sehingga timer berjalan kembali selama kurang lebih 1detik demikian seterusnya, perubahan waktu ditunjukkan pada gambar 4.9
Gambar 4.9 Jalannya timer
setelah tidak ada penumpang di pintu maka input port 2.1 dan port 2.0 berada pada kondisi 1 dan kemudian pintu akan ditutup yang ditunjukkan oleh output latch port 0.5 dan 0.6, seperti ditunjukkan pada gambar 4.10
Gambar 4.10 Langkah ke-4
sampai pada akhirnya mencapai batas yang ditunjukkan pada input port 2.3 dan output latch port 0.5 dan 0.6 berubah kondisi menjadi 0, seperti ditunjukkan oleh gambar 4.11
Gambar 4.11 Langkah ke-5
Lalu dilanjutkan dengan berubahnya kondisi solenoid terkunci kembali yang ditunjukkan oleh output latch port 2.4 seperti ditunjukkan gambar 4.12.
Gambar 4.12 Langkah terakhir
BAB V
PENUTUP
5.1 KESIMPULAN
Berdasarkan perancangan dan pengamatan yang telah dilakukan maka dapat diambil kesimpulan:
1. Sensor bekerja kurang optimal karena peletakannya terhadap sumber cahaya harus benar-benar terfokus penerimaannya, tingkat kepekaan sensor juga sangat terpengaruh dari kondisi cahaya lingkungan sekitar.
2. Motor DC dan roda gigi dapat menggerakkan model pintu secara otomatis dengan baik.
3. Berdasarkan dari simulasi, program pada mikrokontroler dapat bekerja sesuai dengan urutan proses dengan baik
5.2 SARAN
Untuk kepentingan pengembangan dan perancangan sistem yang hampir sama dengan pembuka dan penutup pintu otomatis, maka ada beberapa saran untuk menuju arah yang lebih baik, diantaranya :
1. Pemilihan motor yang lebih kuat supaya dapat menggerakkan konstruksi mekanik dengan lebih mudah serta perancangan konstruksi yang lebih kuat . 2. Penataan sensor yang mantap dan pemilihan sensor yang lebih sensitif dan
DAFTAR PUSTAKA
Boylestad, Robert.L., Nashelsky, Louis. Electronic Devices and Circuit Theory.7th ed. Prentice-Hall, Inc. New Jersey, 1999.
Halliday, David., Resnick, Robert. Fisika. Penerbit Erlangga. Jakarta, 1986.
Malik, Norbert. R. Electronic Circuit Analysis, Simulation, and Design. Prentice-Hall International. America, 1995.
Price, T.E. Analog Electronics. Prentice-Hall. Europe, 1997.
Putra, Agfianto Eko. Belajar Mikrokontroler AT89C51/52/55 (Teori dan Aplikasi). Penerbit Gava Media. Yogyakarta, 2004.
http://www.atmel.com, 2006, “Data sheet”, Atmel Corporation.
http://www.onsemi.com, 2001, “Data sheet”, Semiconductor Components.
http://www.onsemi.com, 2002, “Data sheet”, Semiconductor Components.
http://www.fairchildsemi.com, 2001, “Data sheet”, Fairchild Semiconductor.
GAMBAR RANGKAIAN
VCC R8 R R6 POT 1 3 2 + -U1B lm339 5 6 7 4 11 J9 port 13 1 R5 R R7 POT 1 3 2 J4 limit 1 2 J2 limit 1 2 J10 port 12 1 R13 R J23 port 1 1 R15 R R12 R J20 port 2 1 Q9 PHOTO NPN 1 3 D2 IR LED R16 R R17 R D3 IR LED Q8 PHOTO NPN 1 3 + -U1A LM339 3 2 1 4 11 R14 R R1 Q2 PNP R2 Q1 PNP Q3 PNP R3 K1 RELAY 4PDT9 1 5 10 2 6 11 3 7 12 4 8 13 14 JP12 1 2 3 1 2 3 K2 RELAY 4PDT
LISTING PROGRAM
;========================================================== ;PEMBUKA DAN PENUTUP PINTU BUS OTOMATIS
;BERBASIS MIKROKONTROLER AT89S8252
;PADA SISTEM IDENTIFIKASI TIKET PENUMPANG OTOMATIS
;========================================================== ;INDRA CHRISTIAWAN
;015114053
;========================================================== ;INISIALISASI PORT .ALAMAT MEMORI DAN DATA AWAL
;==========================================================
ir1 bit p0.0
ir2 bit p0.1
led1 bit p0.2
led2 bit p0.3
cw1 bit p0.4
cw2 bit p0.7
ccw1 bit p0.5
ccw2 bit p0.6
sensir1 bit p2.0
sensir2 bit p2.1
senslmt1 bit p2.2
senslmt2 bit p2.3
sole bit p2.4
;---plus---
cek bit p2.7
sinc bit p2.6
sign bit p2.5
;---
delay10 equ 200
delay5 equ 20
org 00
;---ready--- siap:
setb sole
mov tmod,#00000001b
mov p0,#0fh
mov p2,#0011100b
setb cek
cek_kom:
jb cek,$
clr sole
putarcw:
clr led1
setb cw2 sensorpintu1:
jb senslmt1,sensorpintu1
clr sign
matimotor:
clr cw1
clr cw2
setb led1
nyalasensor:
clr ir1
clr ir2
tunggu:
mov r1,delay10
delay:
mov th0,#high -50000
mov tl0,#low -50000
setb tr0
jnb tf0,$
clr tf0
clr tr0
djnz r1,delay
setb sensir1
setb sensir2
cek_sensor1:
jb sensir1,tunggu1
jb sensir2,tunggu1
sjmp takadapenumpang
tunggu1:
mov r2,delay5
delay1:
mov th0,#high -50000
mov tl0,#low -50000
setb tr0
jnb tf0,$
clr tf0
clr tr0
djnz r2,delay1
sjmp cek_sensor1
takadapenumpang:
clr led2
matisensor:
setb ir1
setb ir2
setb ccw1
setb ccw2
sensorpintu2:
jb senslmt2,sensorpintu2 matimotor2:
clr ccw1
clr ccw2
setb led2
setb sole
setb sinc
ljmp siap
end