193
Desain dan Implementasi Alat
Participatory
Environmental Sensing
Untuk Meningkatkan Densitas
Ketersediaan Data Lingkungan
Diwangkara Prastowo* a), Indrazno Siradjuddin a), Muhammad Rifa’ia)
Abstrak: Beberapa tahun terakhir kondisi lingkungan kita samakin memburuk akibat dari pencemaran yang datang dari mana saja dan diperparah dengan measyarakat yang kurang peduli terhadap lingkungan. Dengan adanya konsep participatory environmental sensing yang mengikutsertakan masyarakat dalam mendeteksi lingkungan untuk meningkatkan densitas ketersediaan data sehinggal akan lebih mudah untuk mengetahui kondisi lingkungan. Dengan mudahnya mengetahui kondisi lingkungan masyarakat diharapkan lebih peduli terhadap lingkungan.
Untuk dapat mengimplementasikan dibuat sistem yang dapat mendeteksi parameter lingkungan seperti suhu, kelembapan, kebisingan dan intensitas uv serta dapat mengetahui lokasi dan waktu pengambilan data dan mengirim data – data tersebut ke database, diolah dan ditampilkan di web agar mudah untuk diakses. Untuk mengolah data digunakan metode algoritma pengelompokan K – Means. Hasilnya sistem bekerja dengan baik. Jumlah data yang terkumpul selama dua minggu pengambilan data mencapai 800 data. Dan algoritma K – Means berhasil diaplikasikan pada kumpulan data parameter lingkungan dengan memberikan hasil data yang terbagi menjadi empat kelompok beserta label kondisi lingkungan saat itu.
Kata Kunci: Algoritma K – Means, Lingkungan, Participatory Sensing, Database, Web.
I. PENDAHULUAN
Beberapa tahun terakhir ini kondisi lingkungan disekitar kita semakin memburuk akibat dari pencemaran yang datang dari mana saja dan diperparah dengan masyarakat yang kurang peduli dengan kondisi lingkungannya. Hal ini dikarenakan sulitnya mengetahui kondisi lingkungan dengan akurat dan mudah untuk diakses. Dengan mengetahui kondisi lingkungan dapat memberikan informasi bagaimana keadaan lingkungan di daerah tersebut.
Saat ini cara paling mudah untuk mengetahui kondisi lingkungan adalah dari stasiun – stasiun pemantau. Namun stasiun pemantau ini berjumlah sedikit dan memiliki jarak yang jauh antar stasiun. Sehingga densitas ketersedian data mengenai kondisi lingkungan masih sedikit. Dan juga, dalam jarak yang dekat kondisi lingkungan disuatu tempat dapat berbeda. Dengan jauhnya jarak antar stasiun tersebut, data parameter lingkungan lokasi yang jauh dari stasiun pemantau menjadi kurang akurat.
Dari permasalahan dan latar belakang diatas penulis mengemukakan gagasan berupa konsep
participatory environmental sensing dimana konsep ini melibatkan masyarakat untuk mendeteksi parameter – parameter kondisi lingkungan. Untuk mengimplementasikan konsep participatory
environmental sensing ini penulis berencana
membuat sebuah prototype sistem yang mampu mendeteksi kondisi lingkungan dan dapat diakses dengan mudah di website. Untuk mendeteksi parameter kondisi lingkungan dibuat sebuah alat terintegrasi yang didalamnya terdapat sensor – sensor, GPS dan WiFi module. Data yang dikumpulkan dari alat ini dapat di kirim ke database
server kemudian diklasifikasikan menjadi beberapa kelompok dengan menggunakan metode K-Means Clustering untuk mengGambarkan kondisi lingkungan di suatu tempat, kemudian data ditampilkan di website. Alat ini memiliki dimensi yang relatif kecil sehingga dapat dibawa kemanapun. Dengan desain yang mudah dibawa alat ini mampu mendeteksi kondisi lingkungan dimana kita membawa alat tersebut.
II. TINJAUAN PUSTAKA
2.1 Participatory Environmental Sensing
Participatory Environmental Sensing adalah sebuah konsep yang melibatkan individu dan/atau masyarakat luas untuk berpatisipasi dalam mendeteksi parameter – parameter lingkungan seperti suhu, kelembapan, intensitas UV dan kebisingan. Bentuk dari participatory sensing dapat bermacam – macam diantaranya adalah mengumpulkan data dengan sensor modul yang ada, membagikan keadaan lingkungan sesuai dengan yang diraskan, membantu menempatkan modul sensor di tempat – tempat tertentu dan ikut serta dalam menganalisa kondisi lingkungan dalam konteks non – ahli. Sehingga dapat mengetahui kondisi lingkungan dengan lebih baik.
2.2 Algoritma K-Means Clustering
K- means clustering adalah jenis pengelompokan unsupervised learning, yang digunakan bila ada data yang tidak berlabel (yaitu, data tanpa kategori atau kelompok tertentu). Tujuan dari algoritma ini adalah untuk menemukan kelompok dalam data, dengan jumlah kelompok yang ditunjukkan oleh variabel K. Algoritma bekerja secara iteratif untuk menetapkan setiap titik data ke
194
salah satu kelompok K berdasarkan fitur yang disediakan.
Algoritma pengelompokan Κ – Means
menggunakan penyempurnaan berulang untuk menghasilkan hasil akhir. Input algoritma adalah
jumlah cluster Κ dan kumpulan data. Kumpulan
data adalah kumpulan fitur untuk setiap titik data.
Algoritma dimulai dengan perkiraan awal untuk Κ
centroids, yang dapat dihasilkan secara acak atau dipilih secara acak dari kumpulan data. Algoritma kemudian iterasi antara dua langkah yaitu pelabelan suatu data sesuai dengan kelompok yang telah dibuat dan pembaruan centroid dari data. Pembaruan centroid ini bertujuan untuk mendapatkan centroid dan data hasil pengelompokan tidak lagi berubah. Keberhasilan dari algoritma K – Means ini dapat diketahui ketika algoritma ini mampu mengelompokkan data sesuai dengan jumlah kelompok yang ditentukan sebelumnya dan dapat menentukan dalam kelompok mana jika terdapat data baru yang muncul atau menetukan label untuk data baru yang masuk. Untuk pelebelan atau pemberian nama dari setiap kelompok dilakukan setelah data – data tersebut berhasil dikelompokkan. Dari hasil pengelompokan tersebut dapat dianalisis nilai data dari setiap kelompoknya, dari hasil analisis tersebut nama atau lebel setiap kelompok itu ditentukan.
III. PERANCANGAN DAN PEMBUATAN 3.1. Tahapan Penelitian
Berikut adalah diagram alir tahapan penelitian yang dilakukan
Gambar 1. Diagam Alir Tahapan Penelitian 3.2. Diagram dan Prinsip Kerja Sistem
Gambar 2. Diagram Sistem
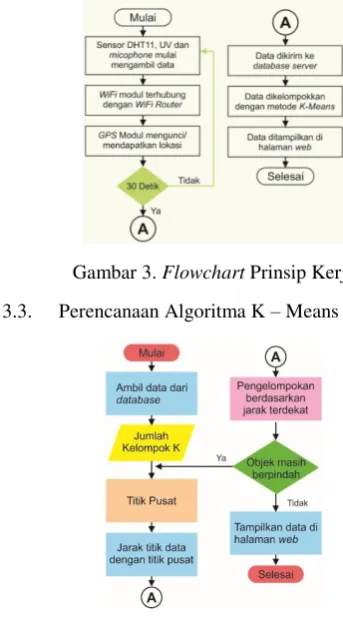
Gambar 3. Flowchart Prinsip Kerja 3.3. Perencanaan Algoritma K – Means
Gambar 4. Flowchart Algoritma K – Means Secara matematis langkah – langkah kerja algoritma pengelompokan K – Means dapat dituliskan sebagai berikut ini:
a. Pengambilan seluruh data yang akan dikelompokkan dari database server.
Data xim (1) Dimana :
i indeks data
I panjang data atau anyaknya data yang
dikelompokkan
i *1,2,3 I+
m indeks varia el
M jumlah sensor atau varia el
m *1,2,3 M+
b. Menentukan jumlah kelompok (cluster) yang dikehendaki. Setiap cluster yang ditentukan, memiliki titik pusat (centroid) pada tiap variabel data.
Centroid Cluster ckm (2) Dimana :
k indeks cluster K umlah cluster
k *1,2,3 K+
195
dengan data menggunakan nilai centroid cluster yang terbaru.
Distance
dki(ck , xi) ‖∑ (Mm 1 ckm-xim)‖ (3)
d. Proses selanjutnya adalah labeling setelah didapat jarak antara titik pusat kelompok (Centroid Cluster) dengan data, selanjutnya data akan diberi label masuk dalam kelompok (cluster) yang mana data tersebut.
Labeling
li argmin dik(ck , xi) (4)
e. Langkah selanjutnya adalah memperbarui titik pusat kelompok (Centroid Cluster). Proses update centroid cluster dilakukan untuk mendapatkan centroid cluster yang baru. Cara update centroid cluster ini adalah dengan menghitung rata – rata dari data yang ada dalam cluster tersebut. Jika masih ada
centroid cluster dan/atau data yang berubah harus dilakukan iterasi proses kembali hingga didapat kondisi konvergen.
Update Centroid Cluster:
for each ckm ∑ xi
m,k *k w+ I
i 1
∑Ii 11 *k w+ (5)
Dimana :
w varia el sementara untuk menyatakan k
3.4. Perancangan dan Pembuatan Web
Gambar 5. Tampilan halaman website 3.5. Perancangan dan Pembuatan Mekanik
Gambar 6. Alat Participatory Environmental Sensing
3.6. Aplikasi Modul DHT11
DHT11 adalah sensor yang dapat mendeteksi dua paramter sekaligus yaitu suhu dan kelembapan. Menggunakan tegangan kerja 5V dan output digital.
Gambar 7. Skema Wiring DHT11 3.7. Aplikasi Sensor UV ML-8511
Sensor UV ini mampu mendeteksi sinar UV-A dan UV-B. Bekerja pada tegangan 3,3 V dengan
output analog.
Gambar 8. Skema Wiring Sensor ML – 8511 Perhitungan dari data analog menjadi nilai intensitas UV dengan satuan mW/cm2 :
UVIntesity ouput voltage-0.99 15.0-0.0
2.8 -0.99 0.0 (6)
3.8. Aplikasi Sound Sensor
Sensor ini mampu mendeteksi suara yang ada disekitarnya menggunakan microphone. Tegangan kerja 5V dengan ouput analog.
Gambar 9. Skema Wiring Sound Sensor Perhitungan konversi ADC ke dB:
d ((nilai A 1023 5)
5 120) (7)
3.9. Aplikasi GPS GY-GPS6MV2
Modul ini adalah standalone GPS yang dapat memberikan data lokasi dimana modul ini berada. Tegangan kerja 5V dan output berupa data.
Gambar 10. Skema Wiring GPS GY-GPS6MV2 3.10. Aplikasi WiFi WeMos D1 Mini
196
Gambar 11. Skema Wiring WiFi Wemos D1 Mini.
IV. PENGUJIAN DAN ANALISA 4.1. Pengujian Tampilan Web
Gambar 12. Data Pada Tanggal 23-06-2017 Di
Database
Gambar 13. Data pada tanggal 23-06-2017 di halaman web
Dari Gambar 12 menunjukkan halaman web
bekerja dengan baik sesuai dengan yang direncanakan karena mampu menampilkan data yang sesuai dengan yang ada di database.
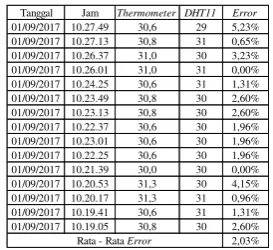
4.2. Pengujian Sensor DHT11
Tabel 1. Perbandingan Pembacaan Sensor DHT11 (suhu) Dengan Thermometer
Tabel 2. Perbandingan Pembacaan Sensor DHT11 (kelembapan) Dengan Hygrometer
Dari hasil pengujian sensor DHT11 pada Tabel 1 dan Tabel 2 pembacaan sensor dengan alat ukur rata – rata error pada pengujian suhu sebesar
Pada pengujian ini terdapat error yang cukup tinggi, dikarena alat ukur yang digunakan untuk kalibrasi atau proses membandingkan data adalah alat ukur yang tersedia banyak dipasaran dan tidak diketahui spesifikasi detailnya, sehingga hasil pengukuran suhu dan kelembapan antara alat ukur dan sensor memiliki selisih yang cukup banyak. 4.3. Pengujian Sensor ML8511
Tabel 3. Perbandingan Pembacaan Sensor ML – 8511 dengan alat ukur UV –meter
Berdsasarkan dari data hasil pengujian sensor ML – 8511 yang dibandingkan dengan alat ukur UV meter. Memiliki rata – rata error sebesar 7,15%. Angka yang cukup besar ini dapat dipengaruhi karena pengujian dilakukan di dalam ruangan yang mana pada saat itu sinat matahari yang masuk hanya sedikit dan sebaiknya untuk mengetahui intensitas UV yang benar dapat dilakukan di luar ruangan. Namun hal ini terpaksa dilakukan karena alat ukur UV – meter yang ada hanya bisa untuk pengukuran di dalam ruangan. Untuk perhitungan rata – rata
error didapat dari persamaan (8) dan perhitungan
error dari peramaan (9). 4.4. Pengujian Sound Sensor
Tabel 4. Perbandingan Pembacaan Sound Sensor dengan Sound–meter
Tanggal Jam Thermometer DHT11 Error 01/09/2017 10.27.49 30,6 29 5,23% 01/09/2017 10.27.13 30,8 31 0,65% 01/09/2017 10.26.37 31,0 30 3,23% 01/09/2017 10.26.01 31,0 31 0,00% 01/09/2017 10.24.25 30,6 31 1,31% 01/09/2017 10.23.49 30,8 30 2,60% 01/09/2017 10.23.13 30,8 30 2,60% 01/09/2017 10.22.37 30,6 30 1,96% 01/09/2017 10.23.01 30,6 30 1,96% 01/09/2017 10.22.25 30,6 30 1,96% 01/09/2017 10.21.39 30,0 30 0,00% 01/09/2017 10.20.53 31,3 30 4,15% 01/09/2017 10.20.17 31,3 31 0,96% 01/09/2017 10.19.41 30,6 31 1,31% 01/09/2017 10.19.05 30,8 30 2,60% 2,03% Rata - Rata Error
Tanggal Jam Hygrometer DHT11 Error
01/09/2017 10.27.49 52,0 52 0,00% 01/09/2017 10.27.13 52,0 53 1,92% 01/09/2017 10.26.37 52,0 52 0,00% 01/09/2017 10.26.01 53,0 52 1,89% 01/09/2017 10.24.25 52,0 51 1,92% 01/09/2017 10.23.49 52,0 53 1,92% 01/09/2017 10.23.13 53,0 53 0,00% 01/09/2017 10.22.37 53,0 53 0,00% 01/09/2017 10.23.01 54,0 53 1,85% 01/09/2017 10.22.25 53,0 52 1,89% 01/09/2017 10.21.39 54,0 54 0,00% 01/09/2017 10.20.53 52,0 54 3,85% 01/09/2017 10.20.17 52,0 53 1,92% 01/09/2017 10.19.41 53,0 53 0,00% 01/09/2017 10.19.05 52,0 52 0,00% 1,14% Rata - Rata Error
01/09/2017 10.27.49 0,12 0,13 1,005687 8,33% 01/09/2017 10.27.13 0,13 0,14 1,006893 7,69% 01/09/2017 10.26.37 0,13 0,13 1,005687 0,00% 01/09/2017 10.26.01 0,16 0,15 1,008100 6,25% 01/09/2017 10.24.25 0,15 0,13 1,005687 13,33% 01/09/2017 10.23.49 0,15 0,13 1,005687 13,33% 01/09/2017 10.23.13 0,15 0,14 1,006893 6,67% 01/09/2017 10.22.37 0,15 0,14 1,006893 6,67% 01/09/2017 10.23.01 0,15 0,15 1,008100 0,00% 01/09/2017 10.22.25 0,12 0,13 1,005687 8,33% 01/09/2017 10.21.39 0,15 0,14 1,006893 6,67% 01/09/2017 10.20.53 0,15 0,14 1,006893 6,67% 01/09/2017 10.20.17 0,12 0,13 1,005687 8,33% 01/09/2017 10.19.41 0,12 0,13 1,005687 8,33% 01/09/2017 10.19.05 0,15 0,14 1,006893 6,67% 7,15% Error
Rata - Rata Error
197
Dari data hasil perbandingan sound sensor dengan sound meter ini rata – rata error-nya sebesar 2,30%. Terdapat error yang tinggi tersebut dapat ditinjau dari beberapa hal. Yang pertama adalah nilai kebisingan sangat cepat cepat berubah. Diduga waktu untuk mendapatkan nilai kebisingan anatara sound sensor dengan sound meter meter berbeda sehingga terdapat perbedaan pada nilai kebisingan yang dihasilkan. Yang kedua dapat dikarenakan senstitivitas dari microphone yang digunakan pada sound meter dengan sound sensor berbeda. Dari beberapa faktor tersebut yang disinyalir dapat menghasilkan selisih nilai kebisingan yang cukup nesar antara sound meter dengan sound meter. 4.5. Pengujian GPS GY-GPS6MV2
Untuk membuktikan benar atau tidaknya data lokasi yang di dapatkan oleh modul GPS dibutuhkan google maps untuk mengetahuinya. Pada tanggal 23 Juni 2017 pengambilan data dilakukan di Dusun Bekucuk, Kec. Sooko Kab. Mojokerto.
(a)
(b)
Gambar 14 (a) Data lokasi berupa koordinat latitude
dan longitude pada tanggal 23-06-2017, (b) Lokasi yang ditunjukkan oleh google maps. Dari Gambar 14 (a) dan (b) terlihat bahwa lokasi yang ditunjukkan oleh gps modul yang berupa koordinat longitude dan latitude sesuai dengan lokasi pada saat pengambilan data yang dibuktikan menggunakan google maps.
4.6. Pengujian Konektifitas Modul Wifi Wemos D1 Mini
Gambar 15. Penggalan data pada tanggal 23-06-2017
Gambar 14. dibagian yang diberi garis bawah berwarana biru merupakan waktu dimana data tersebut masuk ke database. Dari kolom waktu tersebut terlihat bahwa selang waktu dari data satu dengan data lainnya rata – rata adalah 36 detik, bahkan ada yang lebih dari 30 detik. Terjadi keterlambatan data masuk ke database dapat dikarenakan kecepatan koneksi wifi router pada saat itu yang kurang stabil. Kecepatan koneksi wifi
router dapat mempengaruhi kecepatan daat
mengirimkan data dan waktu saat data tersebut berhasil masuk ke database.
4.7. Analisa Hasil Pengelompokan Algoritma K –
means Clustering yang di Terapkan Pada
Data Parameter Kondisi Lingkungan
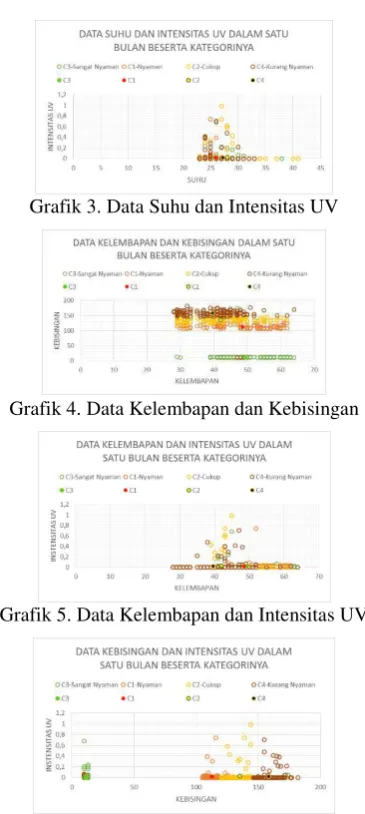
Penerapan algoritma pengelompokan K – Means pada data kondisi lingkungan ini memiliki empat variabel dan dibagi menjadi empat kelompok. Empat variabel data jika divisualisasikan akan menjadi Grafik dengan empat dimensi, maka untuk keperluan analisa, data di plotkan pada Grafik dua dimensi agar dapat divisualisasikan. Grafik yang disajikan merupakan kombinasi dari keempat variabel data. Berikut adalah hasil visualisasi Grafik dari kombinasi keempat variabel data.
Grafik 1. Data Suhu Dan Kelembapan
Grafik 2. Data Suhu dan Kebisingan
198
Grafik 3. Data Suhu dan Intensitas UV
Grafik 4. Data Kelembapan dan Kebisingan
Grafik 5. Data Kelembapan dan Intensitas UV
Grafik 6 Data Kebisingan dan Intensitas UV Pada Grafik 1 hingga Grafik 6 adalah Grafik tampilan data yang terkumpul selama satu bulan yang didalam database server. Data – data ini di dapat menggunakan sensor – sensor pendeteksi parameter kondisi lingkungan yang telah dibuat. Grafik 1 hingga Grafik 6 merupakan tampilan data yang telah diolah dengan algoritma pengelompokan K – Means. Dari Grafik 1 hingga Grafik 6 tampak data – data yang telah terkumpul menjadi empat kelompok. Masing – masing terdapat label yaitu, Sangat Nyaman, Nyaman, Cukup dan Kurang Nyaman buruk untuk memudahkan mengetahui kondisi lingkungan saat itu. Pelabelan ini dilakukan oleh penulis sendiri karena data yang ada belum cukup untuk dianalisa oleh ahli.
5.1. KESIMPULAN
1. Sistem yang dibuat implementasi dari konsep
participatory environmental sensing ini dapat meningkatkan densitas ketersediaan data kondisi lingkungan. Dalam pengambilan data selema 13 hari data yang dikumpulkan sudah mencapai 700 data. Jika dilakukan lebih lama
akan semakin baik karena denstitas ketersediaan data akan semakin bertambah. 2. Alat yang dibuat mampu mendeteksi
parameter kondisi lingkungan dan dapat mengumpulkan dan menyimpan data tersebut
di database server. Kemudian melakukan
pengelompokan data dan ditampilkan hasilnya ditampilkan di halaman web.
3. Pada penelitian ini untuk pengiriman data menggunakan modul wifi didapatkan hasil yang sesuai dengan yang direncanakan, setiap 30 detik. Hanya saja kecepatan pengiriman tergantung dengan kecepatan wifi router
sehingga ada beberapa saat yang lebih 3 hingga 6 detik.
4. Pengaplikasian metode pengelompokan algoritma K – Means untuk mengolah data kondisi lingkungan mendapatkan hasil sesuai dengan yang direncanakan. Karena dapat mengelompokkan data menjadi empat kelompk dan setiap ada data baru dapat dikelompokkan sesuai dengan range data pada kelompok yang ada. Setiap kelompok memiliki range data sebagai berikut:
Sangat Nyaman, suhu: 23-38oC, kelembapan: 29-63%, kebisingan: 10-174, intensitas UV: 0,0 - 0,68 mW/cm2.
Nyaman, suhu:23-33oC, kelembapan: 29-62%, kebisingan: 105-126, intensitas UV: 0,0 - 0,742 mW/cm2.
Cukup, suhu:23-41oC, kelembapan: 29-63%, kebisingan: 120-147, intensitas UV: 0,0 - 0,988 mW/cm2.
Kurang Nyaman, suhu: 23-33oC, kelembapan: 28-64%, kebisingan: 10-182, intensitas UV: 0,0 - 0,705 mW/cm2.
DAFTAR PUSTAKA
[1.] KUZNETSOV, Stacey; PAULOS, Eric. Participatory sensing in public spaces: activating urban surfaces with sensor probes. In: Proceedings of the 8th ACM Conference on Designing Interactive Systems. ACM, 2010. p. 21-30. [2.] Teknomo, Kardi. K-Means Clustering Tutorials.
http:\\people.revoledu.com\kardi\ tutorial\kMean\ diakses pada 26 Desember 2016