viii
INTISARI
Dalam perkembangan zaman yang pesat, perkembangan teknologi juga berkembang sangat pesat. Teknologi yang digunakan sudah aplikatif dan bisa digunakan secara mudah untuk kepentingan manusia. Contohnya adalah teknologi Bluetooth. Teknologi Bluetooth ini dapat digunakan sebagai teknologi pengiriman data tanpa kabel dalam jarak tertentu. Sebagai mahasiswa elektro yang bertanggung jawab akan keilmuanya terhadap masyarakat, terutama dalam bidang control. Berfikir untuk menggabungkan keilmuanya dengan teknologi Bluetooth untuk mempermudah masyarakat dalam pengendalian alat-alat yang sederhana, dibentuklah sistem kontrol yang dapat mengontrol lampu dan pintu garasi menggunakan Bluetooth.
Prinsip kerja dari sistem ini adalah sebagai berikut. Dengan menggunakan handphone
data akan dikirim ke modul Bluetooth dan nantinya akan diteruskan ke mikrokontroler. Data yang dikirim yaitu buka dan tutup pada pintu garasi serta hidup dan mati pada lampu. Data yang sudah dikirim kemudian diterjemahkan oleh mikrokontroler untuk mengatur lampu dan pintu garasi. Setelah perintah dijalankan oleh lampu atau pintu garasi, akan ada feedback dari mikrokontroler ke module Bluetooth. Data feedback kemudian dikirim kembali ke handphone
yang nantinya akan diolah oleh Android sebagai data indikator feedback.
Hasil akhir dari penelitian ini adalah dapat dihasilkanya sistem pengontrolan menggunakan handphone yang dihubungkan ke mikrokontroler untuk mengontrol pintu garasi dan lampu.
Kata kunci: pengiriman dan penerimaan data, teknologi Bluetooth, mikrokontroler, kontrol pintu garasi dan lampu, feedback data.
ix
ABSTRACT
In the modern era, technology development is growing rapidly. The technology is now applicable and can be used easily for the benefit of humans. For example is the Bluetooth technology. Bluetooth technology can be used as a wireless data transmission technology within a certain distance. As an electrical engineering student is responsible for his knowledge for the people, especially in control. Combining the knowledge with Bluetooth technology to facilitated the public in controlling tools, formed a system controller that can control lights and garage door using Bluetooth.
The system’s principle will be explained in here. By using mobile phone, the data will be sent to the Bluetooth module and will be forwarded to the microcontroller. Data will be use to open and close the garage door as well as turn on and turn off on the lights. Then, it will be translated by the microcontroller to control the lights and garage doors. Once the command is executed by the lights or the garage door, then there will be a feedback from the microcontroller to the Bluetooth module. Feedback data is sent back to the mobile phone which will be processed by the Android as an indicator feedback data.
The final result of this research is it can control a system using a cell phone connected to microcontroller to control garage door and light.
TUGAS AKHIR
PENGENDALI LAMPU DAN PINTU GARASI
DENGAN BLUETOOTH BERBASIS
MIKROKONTROLER
Diajukan untuk memenuhi salah satu syarat
memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
disusun oleh :
DWI CAHYA MARYANTO
NIM : 115114022
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
FINAL PROJECT
LAMP AND GARAGE DOOR CONTROL USING
BLUETOOTH BASED ON MICROCONTROLLER
In partial fulfilment of the requirements
for the degree of
Sarjana Teknik
Electrical Engineering Study Program
DWI CAHYA MARYANTO
NIM : 115114022
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
HALAMAN
PERSETUruAN
TUGAS
AKHIR
PENGENDALI LAMPU DAN PINTU GARASI
2f
- t
-
2nt4
lll
DMNGAN
BLUE
BERBASIS
Pembimbing
#
ffi.Er*+\
r*
di,,fud,r,,
-*
flB
fuF
ffioJIIj**
HALAMAN
PENGESAHANTUGAS
AKHIR
PEI\GENDALT LAMPU
T}AN
PINTU GARASI
DEI{GAN BLUETOOTH
BIRBASIS
MIKROKONTROLER
disusun Oleh :
DWI CAHYA MARYANTO
NIM :
115114022Telah dipertahankan di depan panitia penguji
pada tanggal .!3.-^..!..:. .IP\G
dan dinyatakan memenuhi syarat
Susunan Panitia Penguji :
Kefua
Sekretaris
Anggota
Nama Lengkap
Petrus Setyo
Prabowo,
S.T.,M.T.
Ir.
Tjendro,
M,Kom
Djoko Untoro
Suwarno, S.Si.,M.T.
Yogyakart u, ..??.. .1.1 .Y.'.f.i....20
li
tas Sains dan Teknologi
Ltas Sanata Dharma
{
li
..u\t*
I )) ??1.1.'dlr
PERNYATAAN
KEASLIAN
KARYA
"Saya menyatakan dengan sesungguhnya bahwa
tugas akhir ini tidak memuat karya ataubagian karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar pustaka
sebagaimana laYaknYa karya ilmiah"
Yogyakart u,
.l:.!
-201L
vi
HALAMAN PERSEMBAHAN DAN MOTO HIDUP
MOTTO
BUKAN ESOK, LUSA ATAU BAHKAN TAHUN DEPAN , DARI
SEKARANGLAH HARUS DIMULAI.
DWI CAHYA MARYANTO
Karya ini kupersembahkan untuk……..
Tuhan Yesus Kristus, Pembimbing dan Pemberi Harapan ku,
Keluarga Tercinta,
Teman-teman yang luar biasa TE 2011,
HALAMAN
PERNYATAAN
PERSETUJUAN
PUBLIKASI KARYA
ILMIAH
UNTUK
KEPENTINGAN
AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : DWI CAHYA MARYANTO
Nomor
Mahasiswa
: 115114022Demi
pengembanganilmu
pengetahuan, saya memberikan kepada PerpustakaanUniversitas Sanata Dharma karya ilmiah saya yang berjudul :
PENGENDALI LANIPU DAN PINTU GARASI DENGAN
BLUETOOTH
BERBASIS
MII(ROKONTROLER
Beserta perangkat yang diperlukan (bila ada). Dengan demikian, saya telah memberikan
kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan
dalam bentuk media lain, mengelolanya dalam bentuk pangkalan daia, mendistribusikan
secara terbatas, dan mempublikasikannya di internet atau media lain untuk kepentingan
akademis tanpa perlu meminta
ijin
dari saya maupun memberikan royalti kepada saya selama tetap mencantumkan nama saya sebagai penulis.Demikian pernyataan ini saya buat dengan sebenarnya.
Yo gyakart u,..V..:...1
:.1-o-{!.
DWI CAHYA MARYANTO
viii
INTISARI
Dalam perkembangan zaman yang pesat, perkembangan teknologi juga berkembang sangat pesat. Teknologi yang digunakan sudah aplikatif dan bisa digunakan secara mudah untuk kepentingan manusia. Contohnya adalah teknologi Bluetooth. Teknologi Bluetooth ini dapat digunakan sebagai teknologi pengiriman data tanpa kabel dalam jarak tertentu. Sebagai mahasiswa elektro yang bertanggung jawab akan keilmuanya terhadap masyarakat, terutama dalam bidang control. Berfikir untuk menggabungkan keilmuanya dengan teknologi Bluetooth untuk mempermudah masyarakat dalam pengendalian alat-alat yang sederhana, dibentuklah sistem kontrol yang dapat mengontrol lampu dan pintu garasi menggunakan Bluetooth.
Prinsip kerja dari sistem ini adalah sebagai berikut. Dengan menggunakan handphone
data akan dikirim ke modul Bluetooth dan nantinya akan diteruskan ke mikrokontroler. Data yang dikirim yaitu buka dan tutup pada pintu garasi serta hidup dan mati pada lampu. Data yang sudah dikirim kemudian diterjemahkan oleh mikrokontroler untuk mengatur lampu dan pintu garasi. Setelah perintah dijalankan oleh lampu atau pintu garasi, akan ada feedback dari mikrokontroler ke module Bluetooth. Data feedback kemudian dikirim kembali ke handphone
yang nantinya akan diolah oleh Android sebagai data indikatorfeedback.
Hasil akhir dari penelitian ini adalah dapat dihasilkanya sistem pengontrolan menggunakan handphone yang dihubungkan ke mikrokontroler untuk mengontrol pintu garasi dan lampu.
ix
ABSTRACT
In the modern era, technology development is growing rapidly. The technology is now applicable and can be used easily for the benefit of humans. For example is the Bluetooth technology. Bluetooth technology can be used as a wireless data transmission technology within a certain distance. As an electrical engineering student is responsible for his knowledge for the people, especially in control. Combining the knowledge with Bluetooth technology to facilitated the public in controlling tools, formed a system controller that can control lights and garage door using Bluetooth.
The system’s principle will be explained in here. By using mobile phone, the data will be sent to the Bluetooth module and will be forwarded to the microcontroller. Data will be use to open and close the garage door as well as turn on and turn off on the lights. Then, it will be translated by the microcontroller to control the lights and garage doors. Once the command is executed by the lights or the garage door, then there will be a feedback from the microcontroller to the Bluetooth module. Feedback data is sent back to the mobile phone which will be processed by the Android as an indicator feedback data.
The final result of this research is it can control a system using a cell phone connected to microcontroller to control garage door and light.
x
KATA PENGANTAR
Puji dan syukur kepada Tuhan Yang Maha Esa yang telah memberikan kenikmatan berupa kesehatan jasmani dan rohani sehingga penulis dapat menyelesaikan tugas akhir dengan lancar dari awal hingga diakhiri dengan munculnya laporan tugas akhir dengan judul
“PENGENDALI LAMPU DAN PINTU GARASI DENGAN BLUETOOTH BERBASIS MIKROKONTROLER”.
Dalam pembuatan laporan tugas akhir dari awal hingga akhir tentunya ada bantuan dari beberapa pihak sehingga laporan tugas akhir yang disusun oleh penulis sesuai dengan ketentuan yang ada.
Dengan adanya bantuan dari beberapa pihak, penulis dapat menyelesaikan laporan tugas akhir tersebut, penulis mengucapkan terima kasih kepada beberapa pihak diantaranya adalah sebagai berikut :
1. Tuhan Yang Maha Esa yang telah memberikan kenikmatan berupa kesehatan jasmani dan rohani.
2. Kedua orang tua dan saudara penulis yang telah mendukung dan memberikan doa restu. 3. Bapak Petrus Setyo Prabowo, S.T., M.T., sebagai Ka. Prodi Teknik Elektro Universitas
Sanata Dharma Yogyakarta.
4. Bapak Ir.Tjendro, M.Kom., sebagai Dosen Pembimbing dengan penuh perhatian dan pengertianya serta rela meluangkan waktunya unutk membimbing hingga akhir
5. Ibu Ir. Theresia Prima Ari Setiyani, M.T., sebagai Dosen Pembimbing Akademik Prodi Teknik Elektro Fakultas Sains dan Teknologi Universitas Sanata Dharma.
6. Teman-teman TE 2011 yang telah banyak membantu baik lahir maupun batin.
7. Semua pihak yang telah memberikan bantuan dalam penyusunan Laporan tugas akhir ini.
Semoga Laporan tugas akhir ini dapat diterima dengan baik oleh semua pihak. Dan
semua kekurangan yang ada dapat dimakiurni. Semoga Laporan tugas akhir
ini
dapatmernberikan manfaat kepada penulis dan pen-rbaca
Yogyakarla,
q'
1
-
2olL
Dwi Cahya Maryanto
xii
DAFTAR ISI
HALAMAN JUDUL... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
HALAMAN PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS... vii
INTISARI ... viii
ABSTRACT... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
DAFTAR TABEL ... xviii
BAB I : PENDAHULUAN 1.1 Judul ... 1
1.2 Latar Belakang ... 1
1.3 Tujuan dan Manfaat ... 2
1.4 Batasan Masalah... 2
1.5 Metodologi Penelitian ... 3
BAB II : DASAR TEORI 2.1 Android ... 4
2.1.1 Ice Cream Sandwich(Android 4.0-4.0.4)... 4
2.2 Bluetooth ... 4
2.2.1 Bluetooth Android ... 4
2.2.2 Modul Bluetooth HC-05 ... 5
2.3 ATmega 8535... 6
2.3.1 USART... 7
xiii
2.3.3 Timer/Counter Control Register A... 11
2.3.4 Timer/Counter Control Register B... 12
2.4 Driver Motor ... 13
2.4.1 L298... 13
2.5 Sensor Cahaya... 14
2.5.1 Light Dependent Resistor... 14
2.6 Rangkaian Saklar ... 14
2.6.1 Limit Switch... 14
2.6.2 Modul Relay ... 14
2.7 ResistorPull Up... 15
BAB III : PERANCANGAN 3.1 Pemodelan Sistem Secara Keseluruhan ... 16
3.2 Rangkaian Perangkat Keras ... 17
3.2.1 Module Bluetooth dengan ATmega 8535 ... 17
3.2.2 Lampu dan Sensor Lampu ... 17
3.2.3 Driver dan Motor DC ... 18
3.2.4 Rangkaian Saklar ... 18
3.3 Perancangan Perangkat Lunak ... 19
3.3.1 GUI ... 19
3.3.2 Pengaktifan Bluetooth ... 19
3.3.3 Flow ChatAndroid padaHandphone... 20
3.3.4 Flow ChatMikrokontroler... 21
3.3.5 Flow ChatSub Rutin Aktifkan Lampu... 22
3.3.6 Flow ChatSub Rutin Aktifkan Pintu Garasi ... 22
BAB IV : HASIL DAN PEMBAHASAN 4.1 Hasil Implementasi Alat... 24
4.2 Hasil Perancangan Perangkat Keras... 25
4.3 Hasil Perancangan Alat dan Sistem ... 26
4.3.1 Letaklimit switch... 26
4.3.2 Penggunaan Modul HC-05... 28
xiv
4.4 Hasil Perancangan Menggunakan Arduino... 31
4.4.1 Pengujian Motor... 31
4.4.2 Pengujian Lampu ... 31
4.4.3 Pengujian Sensor ... 32
4.4.3.1 PengujianLimit Switch... 32
4.4.3.2 Pengujian LDR... 33
4.5 Pengujian Sistem... 33
4.5.1 Connect ... 33
4.5.2 Garasi ... 39
4.5.3 Lampu ... 42
4.5.4 Pengujian Feedback Error... 46
4.6 Analisis Percobaan ... 47
BAB V : KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 49
5.2 Saran... 49
xv
DAFTAR GAMBAR
Gambar 1.1 Prototipe garasi ... 3
Gambar 2.1 HC-O5 ... 5
Gambar 2.2 Koneksi HC-05 ... 5
Gambar 2.3 ATmega 8535 ... 6
Gambar 2.4 UDR... 7
Gambar 2.5 UCSRA ... 7
Gambar 2.6 USCRB ... 8
Gambar 2.7 UCSRC ... 9
Gambar 2.8 UBRRH dan UBRRL ... 10
Gambar 2.9 Phase correct PWM ... 11
Gambar 2.10 TCCR1A ... 11
Gambar 2.11 TCCR1B ... 12
Gambar 2.12 Modul L298 ... 13
Gambar 2.13 LDR ... 14
Gambar 2.14Limit switch... 14
Gambar 2.15 Modul relay... 15
Gambar 2.16 Rangkaianpull upLDR danlimit switch... 15
Gambar 3.1 Pemodelan lengkap ... 16
Gambar 3.2 Modul Bluetooth dan mikrokontroler ATmega 8535... 17
Gambar 3.3 Sensor lampu ... 17
Gambar 3.4 Driver motor dan motor dc ... 18
Gambar 3.5 Rangkaian saklar... 18
Gambar 3.6 GUI garasi... 19
Gambar 3.7Flow Chart Handphone... 20
Gambar 3.8Flow chartdi sitem penerima ... 21
Gambar 3.9Flow chartsub rutin lampu ... 22
Gambar 3.10Flow Chartsub rutin pintu garasi ... 22
Gambar 4.1 Alat secara keseluruhan ... 24
Gambar 4.2 GUI(Graphic User Interface) ... 24
xvi
Gambar 4.4 Rangkaianlimit switchbawah ... 25
Gambar 4.5 Rangkaian LDR ... 25
Gambar 4.6 Module Bluetooth ... 26
Gambar 4.7 Rangkaian L298... 26
Gambar 4.8 Model penempatanlimit switchpertama ... 27
Gambar 4.9Limit switchdengan tuas yang diperpanjang ... 27
Gambar 4.10 Model penempatanlimit switchkedua ... 27
Gambar 4.11 Model penempatanlimit switchketiga ... 28
Gambar 4.12 Model penempatanlimit switchkeempat ... 28
Gambar 4.13 Program Pengendali motor dc searah jarum jam ... 31
Gambar 4.14 Program Pengenadali motor dc berlawana arah jarum jam ... 31
Gambar 4.15 Program pengendali lampu ... 31
Gambar 4.16 Serial monitor untuklimit switchtidak ditekan ... 32
Gambar 4.17 Serial monitor untuklimit switchsudah ditekan ... 32
Gambar 4.18 Serial monitor LDR dengan cahaya... 33
Gambar 4.19 Serial monitor LDR tanpa cahaya... 33
Gambar 4.20 List programconnected... 34
Gambar 4.21 List fungsi SendData() ... 35
Gambar 4.22 List program Arduino ... 35
Gambar 4.23 List program cek_awal()... 36
Gambar 4.24 List fungsi terimaData()... 37
Gambar 4.25 GUIfeedbackdariconnect... 39
Gambar 4.26 List program tombol buka ... 39
Gambar 4.27 List fungsi buka_pintu() ... 40
Gambar 4.28 GUIfeedbackindikator buka... 41
Gambar 4.29 List tombol tutup ... 41
Gambar 4.30 List fungsi tutup_pintu() ... 41
Gambar 4.31 GUIfeedbackindikator tutup ... 42
Gambar 4.32 List progam hidup... 43
Gambar 4.33 List fungsi hidup_lampu() ... 43
Gambar 4.34 GUIfeedbackindikator hidup ... 44
Gambar 4.35 List program tombol mati ... 44
xvii
xviii
DAFTAR TABEL
Tabel 2.1 Port D bit 7–bit 0 ... 7
Table 2.2 UPM bitssetting... 9
Table 2.3 UCSZ bitssetting... 10
Table 2.4 UCPOL bitsetting... 10
Tabel 2.5 Phase correct PWMsetting... 12
Tabel 2.6 Waveform generation bit... 12
Table 2.7Clock selectbit ... 13
Tabel 4.1 Pengiriman Android ke ATmega 8535... 29
Tabel 4.2 Pengiriman dari ATmega 8535 ke Android ... 29
Tabel 4.3 Pengiriman dari Android ke Arduino Uno ... 30
Tabel 4.4 Pengiriman dari Arduino Uno ke Android ... 30
Tabel 4.5 Hasil pengujianlimit switch... 32
1
BAB 1
PENDAHULUAN
1.1. Judul
Pengendali Lampu dan Pintu Garasi dengan Bluetooth Berbasis Mikrokontroler
1.2. Latar Belakang
Perkembangan teknologi yang terjadi di Indonesia sangatlah pesat. Banyak teknologi-teknologi yang maju dan digunakan diberbagai kalangan. Perkembangan teknologi-teknologi ini apabila disikapi dengan serius dan secara teliti mengikutinya maka dalam perkembangan teknologi yang terjadi di Indonesaia akan membawa kepada kemajuan jaman. Salah satu teknologi yang banyak digunakan adalah teknologi Bluetooth. Teknologi Bluetooth ini sudah menjadi sebuah teknologi yang mudah dan efisien bagi manusia, dimana teknologi Bluetooth dapat mengirim atau menerima data yang nantinya bisa diolah oleh device. Sampai sekarang teknologi Bluetooth menjadi teknologi komunikasi data yang berguna dan banyak dimanfaatkan [1] .
Disamping perkembangan teknologi di Indonesia yang sangat pesat, sebagai seorang mahasiswa teknik elektro yang banyak bergelut pada bidang kontrol mempunyai tanggung jawab pada masyarakat mengenai keilmuan yang dimilikinya. Tetapi banyak juga dari mahasiswa teknik elektro yang tidak bisa mengaplikasiakan keilmuanya yang mereka milik kedalam alat-alat sederhana yang ada di sekitarnya. Sebenarnya keilmuan yang didapat dalam bidang kontrol sudah dapat digunakan pada alat-alat yang sering dijumpai yaitu pada lampu. Salah satu contoh yang bisa digunakan adalah mematikan lampu ketika siang hari [2]. Dari hal kecil itu keilmuan mengenai kontrol sudah dapat diaplikasikan. Ada juga untuk membantu mempermudah masyarakat dalam menjalani kehidupan mereka, contoh sederhana adalah mempermudah untuk membuka dan menutup pintu garasi pada rumah mereka.
garasi. Penunjukan lampu dan pintu garasi oleh penulis dikarena penulis melihat bahwa keilmuan mengenai kontrol dapat diaplikasikan terhadap kedua benda tersebut. Penulis menggabungkan teknologi dengan alat-alat yang biasanya digunakan agar menuju kepada rumah pintar[3]. Nantinya penghuni hanya perlu menggunakan GUI (Graphical User Interface) pada
handphone untuk menghidupkan dan mematikan lampu, membuka dan menutup pintu garasi. Dalam pelaksanaanya dapat melalui device yang berkaitan dengan Bluetooth dan untuk pengendalinya menggunakan mikrokontroler. Mikrokontroler yang digunakan adalah ATmega 8535 karena memiliki memory yang sudah dianggap cukup oleh penulis dan banyak dijumpai di pasaran. Penulis akan membuat prototipe dari garasi yang akan dikontrol.
1.3. Tujuan dan Manfaat
Pada perancangan sistem ini dengan tujuan untuk menghasilkan sistem kontrol menggunakan piranti Bluetooth dan mikrokontroler yang dapat mengontrol lampu dan pintu garasi.
Maanfaat dari skripsi ini untuk adalah :
1. Dapat memahami mengenai cara kerja dari sistem yang penulis buat.
2. Menjadi acuan atau rujukan apabila ingin membuat sistem yang lebih besar lagi.
3. Menjadi bahan pertimbangan apabila membuat sistem yang hampir sama dengan sistem yang akan dibuat.
1.4. Batasan Masalah
Pada penelitian sistem yang akan dibuat, maka penulis memberi batasan sebagai berikut : 1. Sistem hanya dapat mengatur lampu dan pintu garasi saja.
2. OS Android yang digunakan adalah Android Jelly Bean 4.3 3. Sebagai penerima menggunakan modul Bluetooth HC-05.
4. Sebagai pengontrolnya menggunakan mikrokontroler ATmega 8535.
5. Untuk alat yang dikontrol menggunakan lampu AC 220V dan motor DC 12V.
6. Sensor cahaya yang digunakan adalah LDR (Light Dependent Resistor), driver Motor L298N, modul relay, dan rangkaian saklar sebanyak dua buah limit switch untuk pintu garasinya.
8. Pemodelan rumah yang digunakan berbentuk persegi panjang dengan ukuran panjang x lebar adalah 40 cm x 30 cm. Berikut ini adalah gambar dari pemodelan garasi.
Gambar 1.1 Prototipe garasi
1.5. Metodologi Penelitian
Dalam perancangan penelitian yang dilakukan oleh penulis, penulis melakukan langkah – langkah sebagai berikut:
1. Mencari teori-teori mengenai Bluetooth, mikrokontroler ATmega 8535, serta memahami bagaimana sistem komunikasinya.
2. Mencari masukan-masukan tentang penulisan dengan judul yang saling berkaitan dengan sistem yang akan penulis buat.
3. Merancang sistem kontroler dan pembuatan program yang menghubungkan pengguna dengan kontrolernya .
4. Melakukan pengujian setiap alat yang dirancang.
4
BAB II
DASAR TEORI
2.1.
Android
2.1.1.
Ice Cream Sandwich (Android 4.0
–
4.0.4)
Ice Cream Sandwich atau biasa disebut ICS pertama kali dirilis pada bulan Oktober 2011. OS Android ICS tampil dengan UI yang sangat modern dan lebih friendly dibandingkan pendahulunya. Perangkat pertama yang didukung oleh ICS adalah Samsung Galaxy Nexus yang hadir dengan layar 720p [4].
2.2.
Bluetooth
2.2.1. Bluetooth Android
[5]
Pada dasarnya di dalam Android sudah terdapat fungsi untuk mengaktifkan Bluetooth dan memonitoringnya. Fungsi dari BluetoothAndroidAPI (Application programing interface) adalah untuk pengaturan Bluetooth, menemukan perangkat yang baik dipasangkan atau tersedia di daerah setempat, yang menghubungkan perangkat, dan mentransfer data antara perangkat. Semua API sudah tersedia di dalam Android packages.
Berikut ini adalah beberapa kelas dari Bluetooth Android : 1. Bluetooth Adapter
Bluetooth adapter digunakan untuk mengidetifikasi, menemukan perangkat, pemasangan perangkat Bluetooth lainnya. Bluetooth adapter merupakan pintu masuk pertama untuk device.
2. Bluetooth Device
Perangkat yang digunakan untuk mendapatkan informasi tentang perangkat seperti nama, alamat, kelas, dan negara.
3. Bluetooth Socket
4. Bluetooth Server Socket
Berfungsi untuk mendeteksi permintaan koneksi yang sudah ada pada Bluetooth socket.
5. Bluetooth Class
Digunakan untuk menunjukan jenis dari perangkat.
2.2.2. Modul Bluetooth HC-05
Modul Bluetooth merupakan perangkat yang digunakan sebagai Bluetooth serial interface. Modul Bluetooth atau yang sering disebut modul BT, pada dasarnya mempunyai dua model yaitu master device dan slave device. Nama device setelah nomer yang genap menunjukan master atau slave dan itu tidak dapat diganti. Contohnya :
Master device: HC-04-M, M=master
Slave device: HC-04-S, S=slave
Tetapi apabila keluarnya adalah nomor ganjil HC-03, HC-05 untuk mengatur
slave dan masternya cukup dengan mengubah pada AT Command [6].
Komunikasi antara dua Bluetooth modul dapat terjadi paling tidak terdapat kondisi sebagai berikut.
1. Komunikasi harus berasal dari master dengan slave, apabila keduanya adalah master
atau slave maka komunikasi tidak akan terjalin. 2. Password anatara dua modul Bluetooth harus benar.
Gambar 2.1 HC-O5
Modul BT HC-05 merupakan modul Bluetooth yang penggunaan untuk master
dan slave dapat diubah tergantung dengan AT Command. Proses pairing dari perangkat
master tidak hanya dapat berkomunikasi dengan Bluetooth yang spesifik namun dapat mencari dan pairing dengan slave secara otomatis [6].
2.3.
ATmega 8535
Mikrokontroler adalah sebuah chip yang berfungsi sebagai pengontrol rangkaian elektronik dan umunya dapat menyimpan program di dalamnya. Mikrokontroler umumnya terdiri dari CPU (Central Processing Unit), memori, I/O tertentu dan unit pendukung seperti Analog-to-Digital Converter (ADC) yang sudah terintegrasi di dalamnya [7].
Gambar 2.3 ATmega 8535 Penjelasan fungsi setiap port pada mikrokontroler
1. VCC merupakan port untuk digital supply voltage dengan masukan 5V.
2. GND merupakan port untuk ground.
3. Port A (PA7-PA0) berfungsi sebagai input analog ke ADC. Port A juga berfungsi sebagai delapan bit bi-directional I/0 port.
4. Port B (PB7-PB0) brfungsi sebagai delapan bit bi-directional I/0 port dan di setiap pin kakinya juga mempunyai fungsi tersendiri.
5. Port C (PC7-PC0) brfungsi sebagai delapan bit bi-directional I/0 port dan di setiap pin. 6. Port D (PD7-PD0) brfungsi sebagai delapan bit bi-directional I/0 port dan di setiap pin
Tabel 2.1 Port D bit 7 – bit 0 [8]
7. RESETdigunakan untuk mereset mikrokontroler.
8. XTAL1 untuk masukan yang menuju ke penguat osilator inverting dan internal clock. 9. XTAL2 output dari penguat osilator inverting.
10. AVCC port tegangan supply untuk port A dan untuk ADC.
11. AREF port refrensi analog untuk ADC.
2.3.1
USART
Universal Synchronus and Asynchronus serial Receiver and Transmitter (USART) merupakan komunikasi yang memiliki fleksibilitas tinggi, yang dapat digunakan untuk melakukan transfer data baik antar mikrokontroler maupun dengan modul-modul eksternal. Berikut ini adalah penjelasan mengenai register yang ada pada USART [8].
1. USART I/O Data Register–UDR
Gambar 2.4 UDR [8]
USART Transmit Data Buffer Register dan USART Receive Data Buffer Register
menggunakan I/O yang sama atau yang lebih disebut dengan USART Data Register atau UDR.Transmit Data Buffer Register (TXB) menjadi arah data yang di tulis menuju lokasi
register UDR. Pembacaanya data pada Receive Data Buffer Register (RXB).
2. USART Control and Status Register A-UCSRA
Penjelasan setiap bitnya adalah sebagai berikut: Bit 7-RXC: USART Receive Complete
Bit ini set ketika ada data yang tak terbaca di buffer penerima dan bersih ketika buffer
penerima kosong.
Bit 6-TXC: USART Transmit Complete
Bit ini set ketika seluruh frame dalam Transmit shift register telah bergeser dan tidak ada data yang baru muncul di buffer penerima.
Bit 5-UDRE: USART Data Register Empty
Bit ini Menunjukan jika buffer pengirim siap untuk menerima data baru. Bit 4-FE: Frame Error
Bit ini terset jika karakter berikutnya dalam buffer penerima mendapatkan error. Bit 3-DOR: Data Over Run
Bit ini diset ketika kondisi data overun terdeteksi. Bit 2-PE: Parity Error
Bit ini di set ketika karaketer selanjutnya dalam buffer penerima terdapat sebuah parity error dalam penerimaan.
Bit1-U2X: Double The USART Transmission Speed
Bit ini hanya mempunya efek pada operasi asinkron. Bit 0-MPCM: Multi-Processor Comunication Mode
Bit ini memungkinkan untuk multi-processor communication mode.
3. USART Control and Status Register B-UCSRB
Gambar 2.6 USCRB [8] Penjelasan setiap bitnya adalah sebagai berikut:
Bit 7- RXCIE: RX Complete Interrupt Enable
Penulisan bit ini pada salah satu interrupt yang dapat dipakai pada bendera RXC. Bit 6- TXCIE: TX Complete Interrupt Enable
Penulisan bit ini pada salah satu interrupt yang dapat dipakai pada bendera TRX. Bit 5- UDRIE: USART Data Register Empty Interrupt Enable
Bit 4- RXEN: Receiver Enable
Penulisan bit ini pada salah satu enable di penerimaan USART.
Bit 3- TXEN: Transmitter Enable
Penulisan bit ini pada salah satu enable di pengirim USART. Bit 2- UCSZ2: Character Size
Bit ini untuk menyiapkan nilai pada data bits di dalam penerima dan pengirim. Bit 1- RXB8: Receive Data Bit 8
Bit ini untuk data ke sembilan pada penerimaan karakter saat beroprasi dengan serial frames sembilan data bits.
Bit 0- TXB8: Transmit Data Bit 8
Bit ini untuk data ke sembilan pada pengirim karakter saat beroprasi dengan serial frames
sembilan data bits.
4. USART Control and Status Register C-UCSRC
Gambar 2.7 UCSRC [8] Penjelasan setiap bitnya adalah sebagai berikut:
Bit 7- URSEL: Register Select
Bit ini memilih antara UBRRHatau UCSRC. Bit 6-UMSEL: USART Mode Select.
Bit ini memilih antara asinkron UMSEL = 0 dan sinkron UMSEL= 1. Bit 5:4 –UPM 1:0 Parity Mode
Bit ini menentukan tipe dari piranti dan pengecekan. Table 2.2 UPM bits setting [8]
Bit 3-USBS : Stop Bit Select
Bit ini memilih angka untuk bit berhenti yang dimasukan oleh pengirim. USBS = 0 maka stop bit =1-bit dan USBS = 1 maka stop bit =2-bit.
Menetukan ukuran karakter dalam penerima dan pengirim. Table 2.3 UCSZ bits setting [8]
Bit 0-UCPOL: Clock Polarity
Bit ini digunakan pada mode sinkron saja.
Table 2.4 UCPOL bit setting [8]
5. USART Baud Rate Register – UBRRL dan UBRRH
Gambar 2.8 UBRRH dan UBRRL [8] Penjelasan setiap bitnya adalah sebagai berikut.
Bit 15-URSEL: Register Select
Bit ini memilih akses antara UBRRH atau UCSRC Bit 14:12-Reserved Bits
Bit ini harus ditulis nol ketika memilih UBRRH. Bit 11:0-USART Baud Rate Register
2.3.2. Phase Correct PWM
Gambar 2.9 Phase correct PWM [8]
PWM (Pulse Width Modulation) berfungsi untuk mengatur lebar sisi positif dan negatif pulsa kontrol pada frekuensi kerja yang tetap.
Perhitungan dari Timer1 mode phase correct PWM adalah sebagai berikut [9]. Foc1a= Fosc/(2*N*TOP)
Foc1b= Fosc/(2*N*TOP) D=(OCR1X / TOP) * 100% Dengan,
Foc1a = frekuensi output OC1A
Foc1b = frekuensi output OC1B
Fosc = frekuensi clock kristal yang digunakan D = duty cycle
TOP = nilai maksimum counter (TCN1). TOP mempunyai tiga buah nilai untuk mode tersebut yaitu 8 bit (FF), 9 bit (1FF), 10 bit (3FF).
2.3.3. Timer/Counter1 Control Register A
Gambar 2.10 TCCR1A [8] Penjelasan setiap bitnya adalah sebagai berikut.
Bit 7:6–COM1A1:0 Compare Output Mode for Channel A
Bit 5:4–COM1B1:0 Compare Output Mode for Channel B
Tabel 2.5 Phase correctPWM setting [8]
Bit 3–FOC1A:Force Output Compare for Channel A
Bit 2–FOC1B:Force Output Compare for Channel B
Bit ini harus di-set ke nol apabila dalam mode PWM. Bit 1:0–WGM 11:0 :Waveform Generation Mode
Tabel 2.6 Waveform generation bit [8]
2.3.4 .
Timer/Counter1 Control Register B
Gambar 2.11 TCCR1B [8] Penjelasan setiap bitnya adalah sebagai berikut.
Bit ini bernilai satu apabila mengaktifkan input capture noise canceler yang mengakibatkan mengubah output dari input capture pin.
Bit 6 – ICES1:Input Capture Edge Select
Bit ini untuk men-trigger-kan captuere yang genap pada input capture pin . Bit 5- Reserved Bit
Bit ini harus bernilai nol ketika dalam mengatur TCCR1B. Bit 4:3 – WGM13:2 : Waveform Generation Mode
Bit 2:0 –CS12:0 : Clock Select
Table 2.7 Clock select bit [8]
2.4.
Driver Motor
2.4.1. Modul L298
Modul L298N merupakan modul driver untuk motor dc, servo, dan juga motor
stepper. Sistem kerja dari modul L298N dapat digunakan sebagai pembalik putaran atau dapat dikatakan sebagai H-bridge [10].
Gambar 2.12 Modul L298 [10]
2.5.
Sensor Cahaya
2.5.1.
Light Dependent Resistor
(LDR
)Jenis resistor yang nilai hambatan atau nilai resistansinya tergantung pada intensitas cahaya yang diterima. Nilai hambatan LDR akan menurun pada saat cahaya terang dan nilai hambatannya akan menjadi tinggi jika dalam kondisi gelap. Dengan kata lain, fungsi LDR (Light Dependent Resistor) adalah untuk menghantarkan arus listrik jika menerima sejumlah intensitas cahaya (Kondisi Terang) dan menghambat arus listrik dalam kondisi gelap [11].
Gambar 2.13 LDR [11]
2.6.
Rangkaian Saklar
2.6.1.
Limit Switch
Limit switch merupakan jenis saklar yang dilengkapi dengan tuas yang berfungsi menggantikan tombol. Prinsip kerja limit switch sama seperti saklar push on yaitu hanya akan menghubung pada saat tuasnya ditekan pada batas penekanan tertentu yang telah ditentukan dan akan memutus saat saat tuas tidak ditekan. Limit switch termasuk dalam kategori sensor mekanis yaitu sensor yang akan memberikan perubahan elektrik saat terjadi perubahan mekanik pada sensor tersebut. Penerapan dari limit switch adalah sebagai sensor posisi suatu benda (objek) yang bergerak [12].
Gambar 2.14 Limit switch
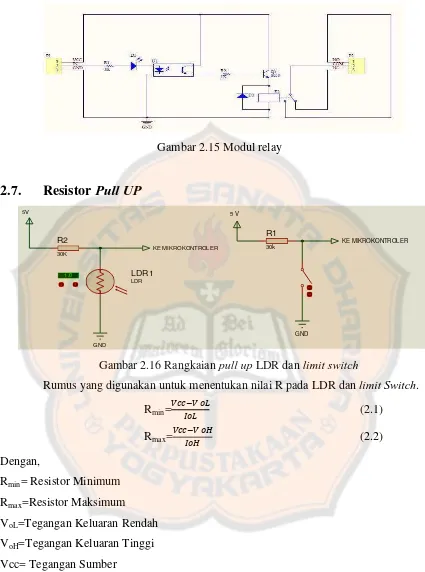
2.6.2. Modul relay
Modul relay berisi 2 relay yang masing-masing dapat bekerja sendiri seperti relay pada umumnya. Modul ini bekerja dengan masukan logika rendah.
Gambar 2.15 Modul relay
2.7.
Resistor
Pull UP
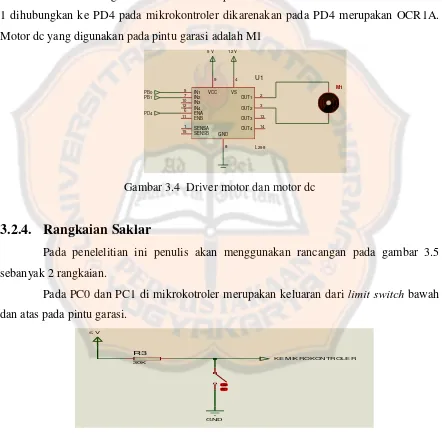
Gambar 2.16 Rangkaian pull up LDR dan limit switch
Rumus yang digunakan untuk menentukan nilai R pada LDR dan limit Switch. Rmin=���−� ���� (2.1)
Rmax=���−� �� (2.2)
Dengan,
Rmin= Resistor Minimum
Rmax=Resistor Maksimum
VoL=Tegangan Keluaran Rendah
VoH=Tegangan Keluaran Tinggi
Vcc= Tegangan Sumber Iol= Arus Keluaran Rendah
IoH=Arus Keluaran Tinggi
1.0 LDR1
LDR
GND
R2
30K 5V
KE MIKROKONTROLER
R1
30k 5 V
GND
16
BAB III
PERANCANGAN
3.1.
Pemodelan Sistem Secara Keseluruhan
Gambar 3.1 Pemodelan lengkap
Alur dari pemodelan sistem secara garis besar adalah sebagai berikut. Sistem yang digunakan adalah closed loop dengan memberikan feedback yang dikirim ke handphone
untuk mengecek sistem berjalan dengan baik. Langkah pertama user harus menyambungkan antara Bluetooth pada handphone dengan modul Bluetooth. Apabila sudah tersambung maka user dapat menggunakan tampilan GUI (Graphic User Interface)
untuk memilih alat yang akan dikendalikan. Data yang dikirim dari Bluetooth pada
handphone akan diterima oleh modul Bluetooth yang nantinya akan diolah pada mikrokontroler. Pengolahan pada mikrokontroler digunakan untuk mengontrol alat yang diperintahkan. Alat yang dikendalikan adalah lampu, pintu garasi. Alat tersebut juga mempunyai pengontrolan kondisi yang nantinya akan digunakan sebagai feedback jika alat sudah melakukan perintah dengan benar. Tampilan feedback akan ditampilkan pada GUI
Handphone.
Android
Handphone
Modul
Bluetooth
Lampu
Pintu
3.2.
Rangkaian Perangkat Keras
3.2.1. Modul Bluetooth dengan Mikrokontroler ATmega 8535
Gambar 3.2 Modul Bluetooth dan mikrokontroler ATmega 8535
Alur dari pemodelan sistem modul Bluetooth dengan mikrokontroler ATmega 8535 adalah sebagai berikut. Modul Bluetooth digunakan untuk menerima data dari
handphone kemudian meneruskannya ke mikrokontroler. Modul Bluetooth ini juga
digunakan untuk mengirim kembali feedback dari mikrokontroler ke handphone.
Mikrokontroler berfungsi untuk menjalankan perintah yang didapat dan pengecekannya, kemudian akan dikirim menjadi feedback. Port RX pada modul Bluetooth disambungkan pada PD0 karena merupakan pin yang bisa digunakan sebagai receiver pada USART, sedangkan port TX pada modul Bluetooth disambungkan pada PD1 karena biasa digunakan untuk transmitter pada mikrokontroler.
3.2.2. Lampu dan Sensor Lampu
keluaran dari sensor cahya yang masuk ke mikrokontroler adalah PA1.
Gambar 3.3 Sensor lampu
Dari datasheet, persamaan 2.1, dan persamaan 2.2 untuk mencari nilai resistor pull up pada sensor lampu, maka diperoleh nilai resistor sebagai berikut.
1.0 LDR1
LDR
GND
R2
30K 5V
R2min=���−� ���� = �− , � �� = 120Ω R2max=���−� �� = �− , � µ� = 500k Ω
Dari nilai Rmin dan Rmax yang sudah diperoleh akan digunakan R2= 30 kΩ
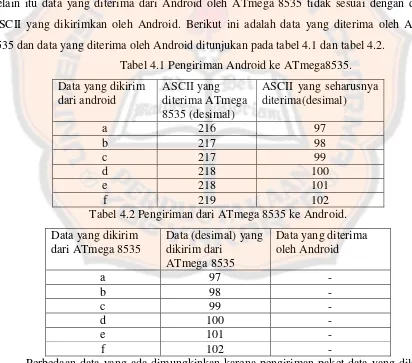
3.2.3. Driver dan Motor DC
Rangkaian driver motor yang digunakan adalah L298N. Input satu dan dua pada modul L298N dihubungkan ke PB0 dan PB1 pada mikrokontroler. Masukan untuk enable
[image:38.595.85.527.226.660.2]1 dihubungkan ke PD4 pada mikrokontroler dikarenakan pada PD4 merupakan OCR1A. Motor dc yang digunakan pada pintu garasi adalah M1
Gambar 3.4 Driver motor dan motor dc
3.2.4. Rangkaian Saklar
Pada penelelitian ini penulis akan menggunakan rancangan pada gambar 3.5 sebanyak 2 rangkaian.
Pada PC0 dan PC1 di mikrokotroler merupakan keluaran dari limit switch bawah dan atas pada pintu garasi.
Gambar 3.5 Rangkaian saklar
Dari datasheet, persamaan 2.1, dan persamaan 2.2 untuk mencari nilai resistor pull up pada rangkaian saklar, maka diperoleh nilai resistor sebagai berikut.
R3min=���−� ���� = �− , � �� = 120Ω
IN1 5 IN2 7 ENA 6 OUT1 2 OUT2 3 ENB
11 OUT3 13
OUT4 14 IN3 10 IN4 12 SENSA 1 SENSB 15 GND 8 VS 4 VCC 9 U1 L298 PB0 PB1 M1
5 V 12 V
R3max=���−� �� = �− , � µ� = 500k Ω
Dari nilai Rmin dan Rmax yang sudah diperoleh akan digunakan R3= 30 kΩ
3.3.
Perancangan Perangkat Lunak
3.3.1. GUI
Gambar 3.6 GUI garasi
Dalam sistem ini yang dikontrol adalah pintu garasi dan lampu. Pada dasarnya
user akan diminta memilih perintah langsung dengan menekan pada GUI di handphone
yang sudah dibuat. Indikator menyala hijau apabila dalam keadaan menyala untuk lampu dan terbuka untuk pintu garasi, bila menyala merah maka keadaan mati untuk lampu dan keadaan tertutup untuk pintu garasi.
3.3.2.
Pengaktifan Bluetooth
Merupakan langkah-langkah untuk melakukan pengaktifan Bluetooth atau penggabungan Bluetooth dengan alat sebelum sistem dilakukan.
Berikut ini Langkah-langkah yang digunakan untuk pengaktifan Bluetooth
1. Pengaktifan Bluetooth dengan mengaktifkan Bluetooth pada handphone yang digunakan.
3. Lakukan penyambungan antara handphone dengan penerima yang disebut pairing.
4. ApabilaBluetooth handphone sudah tersambung dengan modul Bluetooth < “OK”>, dan bila sambungan gagal <”Koneksi Gagal“>.
5. PenampilanGUI akan muncul ketika Bluetooth sudah tersambung . 6. Setelah Penampilan GUI, maka sistem sudah bisa dijalankan.
3.3.3.
Flow Chart
Android pada Handphone
Gambar 3.7 Flow chart Android pada handphone
Flow chart Android pada handphone terdapat pengirim danpenerima sekaligus. Setelah user menekan perintah yang diinginkan maka terjadi pengiriman data ke modul Bluetooth.
3.3.4.
Flow Chart
Mikrokontroler
Gambar 3.8 Flow chart di sistem penerima
1.3.5.
Flow Chart
Sub Rutin Aktifkan Lampu
Gambar 3.9 Flow chart sub rutin lampu
Dalam prototipe nantinya akan menggunakan sebuah lampu AC 220 volt. Sistem yang akan dijalankan adalah alat akan menerima data dari kontoler yang nantinya akan diteruskan dan dideteksi keadaannya apakan menyala atau mati.
3.3.6.
Flow Chart
Sub Rutin Aktifkan Pintu Garasi
Pada flow chart pintu garasi pendeteksian alat yang digunakan adalah limit switch.
Limit switch ini akan menentukan arah putaran dari motor dc yang menentukan kondisi alat tersebut.
Motor akan berputar searah jarum jam (putar ke bawah) dilakukan sampai limit switch bawah tertekan. Dalam kondisi tersebut adalah sistem penutupan pintu garasi. Motor akan berputar berlawanan arah jarum jam (putar ke Atas) dilakukan sampai limit
switch atas terkena. Nantinya pada program akan ditambahkan waktu lamanya perputaran
motor.
Flow chart ini juga menunjukan program yang akan diolah apabila terjadi pembukaan paksa pada pintu garasi. Flow chart program akan menunjukan feedback
24
BAB IV
HASIL DAN PEMBAHASAN
4.1. Hasil Implementasi Alat
Gambar 4.1 Alat secara keseluruhan
Gambar 4.1 merupakan gambar alat yang dirancang secara keseluruhan. Alat yang dibuat terdiri dari dua bagian yang dapat dikontrol, yaitu motor dc 12 volt sebagai penggerak pintu garasi dan lampu 220 volt. Sensor yang digunakan adalah limit switch
sebanyak dua buah yaitu untuk limit switch bawah dan limit switch atas pada pintu garasi, LDR digunakan untuk mengecek kondisi pada lampu. Feedback yang dihasilkan dari sensor nantinya akan dikirim ke GUI seperti gambar 4.2.
Pada tombol “connect” akan langsung mendapatkan feedback dari kondisi awal pada alat. Feedback yang didapat akan menyalakan indikator pada GUI sesuai perintah yang user
minta. Apabila terjadi kesalahan juga akan ditampilkan pada indikator di GUI.
4.2. Hasil Perancangan Perangkat Keras
Gambar 4.3 Rangkaian limit switch atas.
Pada gambar 4.3 sebelum limit switch tidak ditekan maka yang akan masuk ke mikrokontroler adalah 5,021 volt, apabila limit switch ditekan tegangan akan menuju ke
ground dan yang akan masuk ke mikrokontroler adalah 0 volt.
Gambar 4.4 Rangkaian limit switch bawah.
Gambar 4.4 bekerja serupa dengan limit switch atas dan digunakan untuk batas bawah alat bekerja.
Gambar 4.5 Rangkaian LDR
Pin mikrokontrolel Gnd VCC
Pin mikrokontroler Gnd
VCC VCC
Rangkaian LDR terkena cahaya maka hambatannya adalah 0,8907 kΩ, jika LDR tidak terkena cahaya maka hambatan adalah 16,798 kΩ.
Gambar 4.6 Module Bluetooth
Gambar 4.6 adalah modul Bluetooth yang digunakan untuk mengirim dan menerima data, tegangan yang digunakan adalah 5 volt. Kaki RX disambungkan ke pin TX pada mikrokontroler, sedangkna kaki TX disambungkan ke pin RX pada mikrokontroler.
Gambar 4.7 Rangkaian L298
Pada gambar 4.7 kaki 3 dan kaki 2 digunakan sebagai output. Pengaturan pwm pada kaki 6 dan dengan sumber yang masuk pada kaki 4 adalah 12 volt sesuai dengan tegangan yang dibutuhkan oleh motor dc. Rangkaian L298 digunakan sebgai pembalik putaran dengan cara merubah masukan pada kaki 5 dan kaki 7.
4.3. Hasil Perancangan Alat dan Sistem
4.3.1. Letak
Limit Switch
Dalam pengerjaan alat yang dilakukan terdapat beberapa model penempatan limit switch sehingga mendapatkan hasil yang lebih optimal. Penempatan limit switch pada awal perakitan alat seperti pada gambar 4.8.
TX mikrokontroler
RX mikrokontroler
Gnd VCC
Motor dc Motor dc
vcc
Gnd 12 volt Pin mikrokontroler
Gnd
Pin mikrokontroler
Gambar 4.8 Model penempatan limit switch pertama
Kekurangan penempatan limit switch pertama adalah ketika pintu ditutup dan dibuka, tidak dapat mengenai limit switch karena spacer tidak bisa menekan limit switch secara sempurna. Kemudian pada limit switch bawah diganti dengan memanjangkan tuas seperti gambar 4.9.
Gambar 4.9 Limit switch dengan tuas yang diperpanjang
Pemanjangan limit switch berfungsi seperti pesawat sederhana berupa tuas. Semakin panjang lengan kuasa, maka akan semakin besar keuntungan mekanisnya karena gaya yang dibutuhkan untuk menekan limit switch kecil. Maka model limit switch dengan tuas yang lebih panjang digunakan untuk menggantikan limit switch bawah seperti gambar 4.10.
Gambar 4.10 Model penempatan limit switch kedua
Pada pemodelan kedua untuk limit switch bawah dapat tertekan sempurna. Tetapi ketika limit switch tertekan spacer, berat dari spacer membuat tuas panjang yang disambungkan ke limit switch menjadi patah karena tidak bisa menahan berat dari spacer
Gambar 4.11 Model penempatan limit switch ketiga
Dengan penambahan balok karet untuk menahan limit switch yang tertekan spacer
pada saat tertutup dan penambahan balok karet pada bagian atas digunakan untuk menahan
spacer agar tidak melebihi batas dari limit switch atas. Namun ketika spacer menekan limit switch atas, motor tidak langsung berhenti. Masih ada sisa putaran yang membuat limit switch
atas tidak bisa dibaca ketika pengkoneksian kondisi awal. Dibuatlah model penempatan limit switch keempat seperti gambar 4.12.
Gambar 4.12 Model penempatan limit switch keempat
Pemodelan penempatan limit switch keempat ini adalah pemodelan yang digunakan untuk alat. Tuas pada limit switch atas dibuat lebih panjang seperti pada limit switch bawah dan peletakan limit switch atas lebih dikebawahkan. Fungsinya adalah ketika limit switch atas tertekan maka sisa putaran dari motor masih dapat menekan limit switch sehingga ketika pengecekan kondisi awal, limit switch atas bisa terbaca.
4.3.2. Penggunaan Modul HC-05
module Bluetooth telah terkoneksi dengan respone “OK”. Selain itu ada juga perintah “AT+VERSION?” digunakan untuk melihat versi dari Bluetooth itu. Untuk mengetahui nama module Bluetooth menggunakan perintah “AT+NAME?” dan untuk mengetahui sandi dari module Bluetooth menggunakan perintah “AT+PSWD?”. Saat pengerjaan alat juga dicoba perintah untuk mengubah master dan slave Bluetooth yaitu menggunakan perintah “AT+ROLE”. Perintah “AT+ORGL” digunakan untuk mengembalikan modul Bluetooth ke setatus awalnya. Perintah “AT+RESET” digunakan untuk reset modul Bluetooth.
4.3.3. Pemilihan Arduino Menggantikan ATmega 8535
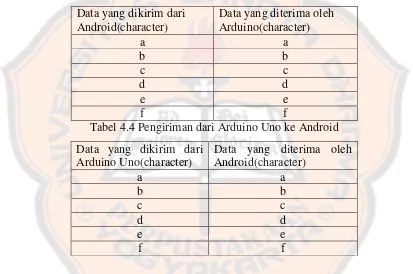
[image:49.612.95.507.285.648.2]Pada pengujian mendapatkan kendala saat pengiriman dari ATmega 8535 ke Android. Selain itu data yang diterima dari Android oleh ATmega 8535 tidak sesuai dengan desimal ASCII yang dikirimkan oleh Android. Berikut ini adalah data yang diterima oleh ATmega 8535 dan data yang diterima oleh Android ditunjukan pada tabel 4.1 dan tabel 4.2.
Tabel 4.1 Pengiriman Android ke ATmega8535. Data yang dikirim
dari android
ASCII yang diterima ATmega 8535 (desimal)
ASCII yang seharusnya diterima(desimal)
a 216 97
b 217 98
c 217 99
d 218 100
e 218 101
f 219 102
Tabel 4.2 Pengiriman dari ATmega 8535 ke Android. Data yang dikirim
dari ATmega 8535
Data (desimal) yang dikirim dari
ATmega 8535
Data yang diterima oleh Android
a 97 -
b 98 -
c 99 -
d 100 -
e 101 -
f 102 -
ATmega 8535 ke Android juga tidak sesuai dengan paket data yang dibutuhkan oleh Android, maka dari itu data tidak bisa dibaca oleh Android.
Dengan mencoba mikrokontroler yang lain yaitu Arduino Uno. Pemilihan Arduino ini dikarenakan pada program Arduino mempunyai fungsi-fungsi yang bisa langsung digunakan untuk berkomunikasi dengan mobul Bluetooth. pengiriman dan penerimaan data yang dilakukan antara Arduino dan Android dapat dijalankan dengan benar. Berikut ini adalah data yang dikirim oleh Android dan diterima oleh Arduino Uno dan data yang dikirim Arduino Uno diterima oleh Android ditunjukan pada tabel 4.3 dan tebel 4.4.
Tabel 4.3 Pengiriman dari Android ke Arduino Uno Data yang dikirim dari
Android(character)
Data yang diterima oleh Arduino(character)
a a
b b
c c
d d
e e
[image:50.612.99.512.251.525.2]f f
Tabel 4.4 Pengiriman dari Arduino Uno ke Android Data yang dikirim dari
Arduino Uno(character)
Data yang diterima oleh Android(character)
a a
b b
c c
d d
e e
f f
4.4. Hasil Perancangan Menggunakan Arduino
[image:51.612.82.539.221.597.2]4.4.1. Pengujian Motor
Gambar 4.13 Program Pengendali motor dc searah jarum jam
Gambar 4.13 merupakan program pengendali motor dc. Pin 6 pada Arduino Uno disambungkan ke kaki 5 pada L298 dan pin 7 pada Arduino Uno disambungkan ke kaki 7 pada L298. Dengan memberi logika tinggi pada pin 7 dan logika rendah pada pin 6 akan menghasilakn putaran searah jarum jam di motor dc.
Gambar 4.14 Program pengenadali motor dc berlawana arah jarum jam
Gambar 4.14 merupaka program pembailk putaran. Jika pin 7 diberi logika rendah dan pin 6 diberi logika tinggi maka akan menghasilkan putaran yang berlawanan arah jarum jam.
4.4.2. Pengujian Lampu
Gambar 4.15 Program pengendali lampu
4.4.3. Pengujian Sensor
Pengujian pada perancangan ini ditampilkan pada serial monitor dan besarnya tegangan yang diperoleh. Pengujian yang dilakukan melibatkan limit switch dan LDR. Hasil pengujian akan ditampilkan pada tabel 4.5 dan tabel 4.6.
4.4.3.1. Pengujian
Limit switch
[image:52.612.83.543.208.493.2]Kaki C pada limit switch disambungkan di pin 6 pada Arduino Uno, kaki NO disambungkan ke ground. Apabila limit switch tidak ditekan, data yang masuk ke Arduino akan ditampilkan pada serial monitor seperti gambar 4.16.
Gambar 4.16 Serial monitor untuk limit switch tidak ditekan
Apabila limit switch sudah ditekan maka data yang masuk ke Arduino logika rendah dan ditampilkan pada serial monitor seperti gambar 4.17.
Gambar 4.17 Serial monitor untuk limit switch sudah ditekan
Dari hasil tersebut nilai yang dihasilkan dari percobaan limit switch sesuai dengan perancangan. Tabel 4.5 menunjukan hasil tegangan dan serial monitornya :
Tabel 4.5 Hasil pengujian limit switch
keadaan dari limit switch atas dan bawah
Tegangan (volt)
Dibaca serial monitor
Tidak terkena 5,021 1
4.4.3.2 pengujian LDR
Berdasarkan perancangan apabila LDR diberikan cahaya maka LDR akan memberikan logika rendah ke pin 2 pada Arduino Uno. Logika rendah pada Arduino Uno ditampilkan pada serial monitor seperti gambar 4.18.
Gambar 4.18 Serial monitor LDR dengan cahaya
[image:53.612.83.540.239.556.2]Jika LDR tidak diberi cahaya maka memberikan logika tinggi ke pin 2 pada Arduino Uno. Hasil ditampilkan pada serial monitor seperti gambar 4.19.
Gambar 4.19 Serial monitor LDR tanpa cahaya
Dari pengujian dengan dan tanpa cahaya didapatkan bahwa kluaran LDR sesuai dengan perancangan. Tabel 4.6 menunjukan hasil dari tegangan dan serial monitornya.
Tabel 4.6 Hasil pengujian LDR Keadaan dalam
pengujian pada LDR
Tegangan (volt)
Serial monitor
Tidak terkena cahaya 3,045 1
Terkena cahaya 0,155 0
4.5. Pengujian Sistem
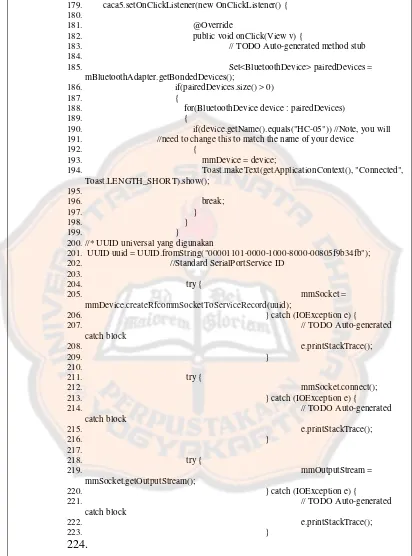
4.5.1.
connected
Gambar 4.20 List program connected
179. caca5.setOnClickListener(new OnClickListener() { 180.
181. @Override
182. public void onClick(View v) {
183. // TODO Auto-generated method stub
184.
185. Set<BluetoothDevice> pairedDevices = mBluetoothAdapter.getBondedDevices();
186. if(pairedDevices.size() > 0) 187. {
188. for(BluetoothDevice device : pairedDevices) 189. {
190. if(device.getName().equals("HC-05")) //Note, you will 191. //need to change this to match the name of your device
192. {
193. mmDevice = device;
194. Toast.makeText(getApplicationContext(), "Connected", Toast.LENGTH_SHORT).show();
195. 196. break; 197. } 198. } 199. }
200.//* UUID universal yang digunakan
201. UUID uuid = UUID.fromString("00001101-0000-1000-8000-00805f9b34fb"); 202. //Standard SerialPortService ID
203.
204. try {
205. mmSocket =
mmDevice.createRfcommSocketToServiceRecord(uuid);
206. } catch (IOException e) {
207. // TODO Auto-generated catch block
208. e.printStackTrace();
209. }
210.
211. try {
212. mmSocket.connect();
213. } catch (IOException e) {
214. // TODO Auto-generated catch block
215. e.printStackTrace();
216. }
217.
218. try {
219. mmOutputStream =
mmSocket.getOutputStream();
220. } catch (IOException e) {
221. // TODO Auto-generated catch block
222. e.printStackTrace();
223. }
225. try {
226. mmInputStream =
mmSocket.getInputStream();
227. } catch (IOException e) {
228. // TODO Auto-generated catch block
229. e.printStackTrace();
230. }
231. //beginListenForData();
232. send="e"; // data yang dikirim dalam char
233. try {
234. SendData(send); 235. terimaData(); 236. } catch (IOException e) {
237. //TODO Auto-generated catch block 238. e.printStackTrace();
239. }
240. Toast.makeText(getApplicationContext(), "data di terima", Toast.LENGTH_SHORT).show();
241. }
242. });
[image:55.612.95.542.90.491.2]243.
Gambar 4.20 List program connected (lanjutan)
Setelah UUID dipersiapkan, langkah selanjutnya adalah menjalankan program SendData(). Isi dari fungsi SendData() dapat dilihat pada gambar 4.21.
49. //* mengirim data dari android
50. void SendData(String data)throws IOException{ 51. mmOutputStream.write(data.getBytes()); 52. mmOutputStream.flush();
53. }
Gambar 4.21 List fungsi SendData()
Di dalam fungsi SendData digunakan untuk mengirim data dari Android ke Arduino Uno. Pada program connected data “e”(dalam bentuk char) dikirimkan dari Android ke Arduino Uno. Data tersebut diterima dan diproses oleh Arduino Uno. Pada Arduino terdapat listing program seperti gambar 4.22.
38. if (kata==101) // cek awal ) // decimal ASCI ‘e’ 39. {
40. cek_awal(); 41. kata=0; 42. //delay(3000); 43. }
44. else if (kata==97) // decimal ASCI ‘a’ 45. {
46. buka_pintu(); 47. }
48. else if (kata==98) ) // decimal ASCI ‘b’ 49. {
50. tutup_pintu(); 51. }
52. else if (kata==99) ) // decimal ASCI ‘c’ 53. {
54. hidup_lampu(); 55. }
56. else if(kata==100) ) // decimal ASCI ‘d’ 57. {
58. matikan_lampu(); 59. }
[image:56.612.88.526.183.668.2]60. }
Gambar 4.22 List program Arduino(lanjutan)
Data “e” yang diterima oleh Arduino Uno kemudian diterjemahkan menjadi desimal ASCI dan masuk pada fungsi cek_awal(). Isi dari fungsi cek_awal() adalah seperti gambar 4.23.
62. void cek_awal() 63. {
64. lam=digitalRead(2); 65. gar1=digitalRead(3);//LSA 66. gar2=digitalRead(4);//LSB 67. if (lam==1)//mati lampu 68. {
69. lampu="L0"; 70. }
71. else if (lam==0)//hidup lampu 72. {
73. lampu="L1"; 74. }
75. if ((gar1==1)&&(gar2==0))//tutup pintu 76. {
77. garasi="G0"; 78. }
79. else if ((gar1==0)&&(gar2==1))//buka pintu 80. {
81. garasi="G1"; 82. }
83. else if((gar1==1)&&(gar2==1)) 84. {
85. garasi="G2"; 86. }
87. BTSerial.print(lampu); // data yang dikirim untuk tombol hidup dan mati lampu 88. BTSerial.print(garasi); // data yang dikirim untuk tombol buka dan tutup 89. BTSerial.write("\r\n");
90. kata=0; 91. delay(1000); 92. }
Di dalam fungsi cek_awal() terdapat perintah untuk mengecek setiap sensornya. Untuk hasil dari sensor LDR disimpan pada variabel ‘lampu’, sedangkan untuk pintu garasi disimpan dengan variabel ‘garasi’. Kemudian data dikirimkan ke Android satu paket dengan “\r\n”. Data yang dikirim dari Arduino Uno akan diterima oleh Android dan diolah pada fungsi terimaData(). Berikut fungsi terimaData() seperti gambar 4.24.
55. void terimaData() 56. {
57. final Handler handler = new Handler(); 58. final byte delimiter = 10;
59. stopWorker = false; 60. readBufferPosition = 0; 61. readBuffer = new byte[1024];
62. workerThread = new Thread(new Runnable() { 63. public void run() {
64. while(!Thread.currentThread().isInterrupted() && !stopWorker) { 65. try
66. {
67. int bytesAvailable = mmInputStream.available(); 68. if(bytesAvailable > 0)
69. {
70. byte[] packetBytes = new byte[bytesAvailable]; 71. mmInputStream.read(packetBytes);
72. for(int i=0;i<bytesAvailable;i++) 73. {
74. byte b = packetBytes[i]; 75. if(b == delimiter) 76. {
77. byte[] encodedBytes = new byte[readBufferPosition];
78. System.arraycopy(readBuffer, 0, encodedBytes, 0, encodedBytes.length); 79. kalimat = new String(encodedBytes, "US-ASCII");
80. readBufferPosition = 0; 81. //*feedback yang dimunculkan setelah menerima data. 82. handler.post(new Runnable() { 83. public void run()
84. {
85. apa=kalimat.substring(0, 1);
86. String lampu=kalimat.substring(1, 2); 87. String garasi=kalimat.substring(3, 4); 88. char lampu1=lampu.charAt(0); 89. char garasi1=garasi.charAt(0); 90. char apa1=apa.charAt(0);
91. final Button caca=(Button)findViewById(R.id.button1); 92. final Button caca2=(Button)findViewById(R.id.button2); 93. final Button caca3=(Button)findViewById(R.id.button3); 94. final Button caca4=(Button)findViewById(R.id.button4); 95. final Button caca5=(Button)findViewById(R.id.connect);
96. Toast.makeText(getApplicationContext(), apa, Toast.LENGTH_SHORT).show(); 97. if(lampu1=='1'){
[image:57.612.100.536.171.673.2]98. caca4.setBackgroundColor(Color.GREEN); 99. caca3.setBackgroundColor(Color.GRAY); 100. }
101. else if(lampu1=='0'){
102. caca3.setBackgroundColor(Color.RED);
103. caca4.setBackgroundColor(Color.GRAY); 104. }
105. if(garasi1=='1'){
106. caca.setBackgroundColor(Color.GREEN);
107. caca2.setBackgroundColor(Color.GRAY); 108. }
109. else if(garasi1=='0'){
110. caca2.setBackgroundColor(Color.RED);
111. caca.setBackgroundColor(Color.GRAY); 112. }
113. else if(garasi1=='2'){
114. caca2.setBackgroundColor(Color.RED);
115. caca.setBackgroundColor(Color.GREEN); 116. }
117. if(apa1=='a'){ 118.
119. caca.setBackgroundColor(Color.GREEN); 120. caca2.setBackgroundColor(Color.GRAY);} 121. else if(apa1=='b'){
122. caca2.setBackgroundColor(Color.RED); 123. caca.setBackgroundColor(Color.GRAY); 124. }
125. else if(apa1=='c'){
126. caca4.setBackgroundColor(Color.GREEN); 127. caca3.setBackgroundColor(Color.GRAY); 128. }
129. else if(apa1=='d'){
130. caca3.setBackgroundColor(Color.RED); 131. caca4.setBackgroundColor(Color.GRAY); 132. }
133. else if (apa1=='f'){
134. caca2.setBackgroundColor(Color.RED);
135. caca.setBackgroundColor(Color.GREEN); 136. }
137. else if (apa1=='g'){
138. caca3.setBackgroundColor(Color.RED); 139. caca4.setBackgroundColor(Color.GREEN); 140. }
141. } 142. }); 143. } 144. else 145. {
146. readBuffer[readBufferPosition++] = b; 147. }
148. } 149. } 150. }
151. catch (IOException ex) 152. {
153. stopWorker = true; 154. }
155. } 156. } 157. });
158. workerThread.start();
[image:58.612.101.538.70.632.2]159. }
Pada fungsi terimaData() digunakan untuk menerima paket data yang dikirim oleh Android dan nantinya akan dijadikan indikator feedback sesuai dengan paket data yang diterima. Feedback akan dimunculkan seperti gambar 4.25.
Gambar 4.25 GUI feedback dari connect
4.5.2. Garasi
Sistem ini berkaitan dengan 2 tombol yaitu tombol buka dan tombol tutup. Tombol buka akan mengirimkan data ‘a’(dalam bentuk char) ke Arduino Uno seperti pada gambar 4.26.
244.caca.setOnClickListener(new OnClickListener() { 245. @Override
246. public void onClick(View v) { 247.
248. send = "a"; // data yang dikirim dalam bentuk char
249. try {
250.
251. SendData(send);
252. Toast.makeText(getApplicationContext(), "a", Toast.LENGTH_SHORT).show();
253. terimaData(); 254. } catch (IOException e) {
255. // TODO Auto-generated catch block 256. e.printStackTrace();
257.
258. }
259. }
260. });
Nilai ‘a’ akan dikirimkan ke Arduino Uno menggunakan fungsi SendData() seperti gambar 4.21. Setelah data diterima oleh Arduino Uno, maka data tersebut akan diolah sesuai dengan desimal ASCI pada gambar 4.22. Proses yang kemudian dilakukan adalah memanggil fungsi buka_pintu() seperti gambar 4.27.
94. void buka_pintu() 95. {
96. int a=0;
97. unsigned long i=0; 98. gar1=digitalRead(3);//LSA 99. //gar2=digitalRead(4);//LSB 100. gar3=7;
101. gar4=6; 102. pwm=5;
103. digitalWrite(gar3,HIGH); 104. digitalWrite(gar4,LOW); 105. analogWrite(pwm,225); 106. while((gar1!=0)&&(a==0)) 107. {
108. gar1=digitalRead(3); 109. i++;
110. if(i==800000){a=1;} 111. }
112. digitalWrite(gar3,LOW); 113. digitalWrite(gar4,LOW); 114. analogWrite(pwm,0); 115. if (a==1)
116. {
117. BTSerial.write("fxxx\r\n"); // paket data untuk feedback error 118. kata=0;
119. delay(200); 120. a=0; 121. } 122. else 123. {
124. BTSerial.write("axxx\r\n"); // paket data untuk feedback buka 125. kata=0;
126. delay(200); 127. }
[image:60.612.106.545.145.552.2]128.}
Gambar 4.27 List fungsi buka_pintu()
Dalam fungsi buka_pintu() motor dc bekerja berlawanan arah jarum jam. Apabila
limit switch atas tertekan maka akan mengirimkan paket data yang natinya akan diolah pada fungsi terimaData() di Android sebagai feedback indikator seperti gambar 4.24. Feedback
Gambar 4.28 GUI feedback indikator buka
[image:61.612.97.523.254.492.2]Jika tombol tutup akan mengirimkan ‘b’(dalam bentuk char) seperti gambar 4.29 yang selanjutnya akan dikirim dengan fungsi SendData seperti gambar 4.21.
Gambar 4.29 List tombol tutup
Arduino akan mengolah data dan diterjemahkan menjadi desimal ASCI seperti gambar 4.22. Setelah data diolah masuk dalam fungsi tutup_pintu() seperti gambar 4.30.
130.void tutup_pintu() 131.{
132. int a=0;
133. unsigned long i=0; 134. gar2=digitalRead(4);//LSB 135. gar4=6;
136. gar3=7; 137. pwm=5;
138. digitalWrite(gar4,HIGH); 139. digitalWrite(gar3,LOW); 140. analogWrite(pwm,225);
Gambar 4.30 List fungsi tutup_pintu()
262. caca2.setOnClickListener(new OnClickListener() { 263. @Override
264. public void onClick(View v) {
265. // TODO Auto-generated method stub 266.
267. send="b";// data yang dikirim dalam bentuk char
268. try {
269. SendData(send); 270. terimaData(); 271. } catch (IOException e) {
272. // TODO Auto-generated catch block 273. e.printStackTrace();
274. }
275. }
Gambar 4.30 List fungsi tutup_pintu()(lanjutan)
Dalam fungsi tutup_pintu() motor akan bekerja searah jarum jam. Jika limit switch
bawah terkena maka akan mengirimkan paket data yang nantinya diolah di fungsi terimaData() pada Android seperti pada gambar 4.24. Feedback indikator ini akan muncul seperti gambar 4.31.
Gambar 4.31 GUI feedback indikator tutup
4.5.3. Lampu
Pengontrolan lampu mengunakan 2 tombol pada GUI yaitu tombol hidup dan mati. Apabila tombol hidup ditekan maka mengolah program seperti gambar 4.32.
141.while((gar2!=0)&&(a==0)) 142. {
143. gar2=digitalRead(4); 144. i++;
145. if (i==800000){a=1;} 146. }
147. digitalWrite(gar4,LOW); 148. digitalWrite(gar3,LOW); 149. analogWrite(pwm,0); 150. if (a==1)
151. {
152. BTSerial.write("fxxx\r\n"); // paket data feedback error yang dikirim 153. kata=0;
154. delay(200); 155. a=0; 156. } 157. else 158. {
159. BTSerial.write("bxxx\r\n"); // paket data feedback indikator tutup 160. kata=0;
161. delay(200); 162. }
292. caca4.setOnClickListen
![Table 2.3 UCSZ bits setting [8]](https://thumb-ap.123doks.com/thumbv2/123dok/926164.599662/30.595.92.500.98.595/table-ucsz-bits-setting.webp)
![Gambar 2.9 Phase correct PWM [8]](https://thumb-ap.123doks.com/thumbv2/123dok/926164.599662/31.595.84.519.245.633/gambar-phase-correct-pwm.webp)