Design of Instrumentation
For Flatness Measurement of Railroads
Yayan Prima Nugraha
Control and Intelligent Systems-Electrical Engineering School of Electrical Engineering and Informatics
Bandung Institute of Technology Bandung, Indonesia [email protected]
Dwi Hanto, Andi Setiono,
Tomi Budi Waluyo and Bambang Widiyatmoko
Physics Research CenterIndonesian Institute of Sciences Tangerang Selatan, Indonesia
Abstract—Train has supported in some aspect one of which is the safety on railway. This research develop an instrumentation to detect the flatness railroads using multiple sensors. The method in this research is install instrumentation sensors for measurement on railway carriages. Rail flatness measurements carried out from one station to the next station. Measurement obtained shift angle and position on translation and rotation, also coordinates of the location. The magnitude of shift angle and position is obtained from the sensor Inertial Measurement Unit (IMU) which are Accelerometer Sensor, Compass Magnetometer, Gyroscope, Air Pressure Sensor and GPS. LabVIEW 2013 used to GUI systems which is equipped with a data logger for measurements automatic saving data.
Key words: IMU; GPS; Flatness Railways
I. INTRODUCTION
The important and fundamental issues in transportation is travel safety. Many aspects can influence and support the creation of comfort and security of transportation trips. As we know that the transportation road is a trending topic today which is given fully concern in several case e.g. traffic jam problem, the road quality, quality of services, travel accident, derailment, and pollution problems. Those issues are necessary special attention in dealing as wisely and can spawned a sustainable solution. In this research will focus on one of the above strategic issues, namely on issues relating to trending topic, especially railway transport. A frequent problem is derailment in some coordinates caused by rail traversed do not have the qualifications bearing solid ground that is able to withstand the train either when stopped or when driving. To cope with the drop in the train, it is necessary to test the flatness of the railway. The feasibility test is performed by measuring the intensity of the shocks on the train while its running [1]. Several aspects would be considered in analyzing the feasibility of the railroad related to the factors that influence the position of the physical system. Furthermore, support for the latest electronic technologies are also required to meet the specifications of the system so that the goal of this research may achieved with good and right on target.
II. METHODS/EXPERIMENT
The paper presents an instrumentation to detect the flatness railroads using multiple sensors. This instrumentation using a data acquisition system that is equipped with a data logger developed on board. Graphical User Interface (GUI) mode in this research using LabVIEW. In addition to this, the data acquisition system consists of several sensors are integrated into a system Inertial Measurement Unit (IMU) [2] to measure some physical quantities such as acceleration changes, angle changes, position changes and change of coordinates [3]. Measurements were performed in a railway carriage which starts from one point to the another point.
A. Sensor Installation and Data Logger
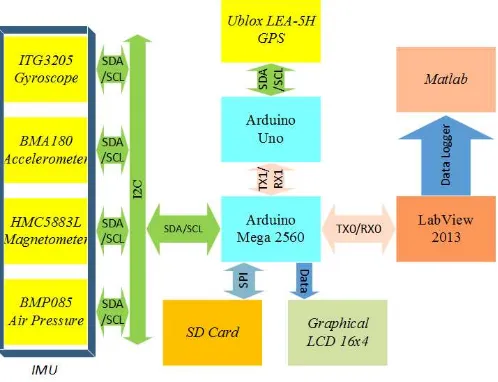
Sensors that is utilized in this research is a sensor that is integrated in an embedded system IMU GY81. Several sensors [4] are contained in GY81 namely Accelerometer BMA180, HMC5883L Magnetometer, Gyroscope ITG3205, Pressure Sensor BMP085, and Ublox LEA-5H GPS. Accelerometer sensor is used to determine the movement of trains in the direction of translation [5]. This sensor provides a visual representation of how the presence of a train while driving from one station to the next station. The direction of rotational movement detected using Gyroscope sensor, where the sensor measures the magnitude of the angular velocity [6], [7] of the train. Translational and rotational movement measurements are used to the primary basis for determining the flatness [8] of the railroad. The air pressure is measured using a sensor BMP085 which is already integrated in the embedded board GY81. Magnetometer sensor is used to determine the deviation of direction on the coordinates of the earth [9]. However, GPS is also an important component in generating a database to determine the current location of the recording data [8]. The results of measurement sensors will be displayed through the LabVIEW interface. The interface was made a data logger systems in order to the result of measurement can be analyzed using Matlab. All the measurement data result will be stored on a SD Memory Card and also stored into the data logger which is connected directly to the embedded board. Data logger results will be used as a basis for offline analysis using Matlab. Fig. 1 below shows how the overall 2015 International Conference on Automation, Cognitive Science, Optics, Micro Electro-Mechanical System, and
Information Technology (ICACOMIT), Bandung, Indonesia, October 29–30, 2015
system was built beginning from sensors system, data acquisition implementation and data logger system integration.
Fig. 1. Block Diagram of Instrumentation Design
B. Sensors Calibration and Synchronization Systems
Embedded sensors GY81 a digital sensor that has been integrated with the system I2C communication protocol. The protocol system is very commonly used and easily integrated with multiple platforms such as Arduino microcontroller, Mikro-E, Code Vision AVR and so on. the selection of specific protocol communication had an impact on the ease of system calibration. Therefor calibration of the sensor is brought closer to the verification system by measuring instrument that has been calibrated [10]. This approach simply provide sufficient accuracy for verification and validation of the object to be measured with reference to the measuring instrument has been calibrated and have a valid measurement results.
Verification performed in a laboratory sensor Advanced Robotic, Electrical Engineering, Bandung Institute of Technology by using a sensor that has been previously calibrated sensor is embedded GY86. The results of the calibration of these systems provide measurement range that will be used as reference for future field measurements. Design of data acquisition system is also integrated into the data system logger which is divided into two parts, namely on board and use a computer or laptop. Data logger on the personal computer using LabVIEW 2013 interface. This system is very easy to build graphical interfaces systems due to it uses a graphical programming language such as Simulink that allows users to develop applications based on GUI.
The output of the sensor system through the I2C protocol read directly using a microcontroller. GY81 IMU system integrated with Mega 2560 Arduino microcontroller through an I2C protocol, whereas Ublox LEA-5H GPS connected to the Arduino Uno microcontroller via I2C protocol. For each sensor will be verified with the measuring instrument has been calibrated before. For systems BMA180 accelerometer sensor
and gyroscope ITG3205 verified with MPU6050 sensor system which has two sensors in it that the accelerometer sensor and gyroscope sensor. HMC5883L magnetometer sensors in GY81 going to verified using the HMC5883L sensor on GY86 IMU embedded board. 5 volt power source are provided from the power bank 20 A for the portable stand-alone mode.
C. Experiment
Measurement performed by testing the technical feasibility of a data acquisition system i.e. by testing the design around Bandung Institute of Technology campus, in the neighborhood Puspiptek Serpong, South Tangerang region, as well as testing the Bandung Railway Station - Jatinegara Railway Station. The system measurements were carried out with data synchronization in advance and check all sensor systems as well as communication between the embedded board with the personal computer. Once the system fully integrated to be used later, hereafter get started checking data acquisition sensors, checking power capacity and system initialization of data logger embedded systems either on board or on the computer. Once all ready, measurements were carried out with the process of recording data a change of position through the accelerometer sensor, gyro sensor, magnetometer, barometer, and LEA-5H GPS Ublox.
Data communication protocol Among the computer system and "embedded board" i.e. that is used UART protocol. The protocol system is entirely handled by system management driver using VISA (Virtual Instrument Software Architecture) in LabVIEW 2013. VISA setting some parameters set up is such baud rate, parity, data bits, stop bits, flow control etc. Moreover setting asynchronous mode and synchronous mode is also handled to LabVIEW interface. The mode setting is very influential on the personal computer and may cause serious problems if we choose the wrong mode among asynchronous mode and synchronous mode.
Storage system or format data using Comma Separated Value (CSV) is chosen to suit the standard format of data base. Usage CSV format this was done on both data logger i.e. the system of embedded board and also data logger on computers. The use of these is expected to provide ease in submitted offline analysis using Matlab. The process of accessing data extension "*.txt" results of the sampling data logger in Matlab using the command "dlmread". The results of data plot in Matlab it would be the basis for further analysis.
D. Analisys
III. RESULT/DISCUSSION
The results of the measurement embedded board system covering several sensors one of which is a measure the translational acceleration to the accelerometer sensor. At BMA180 sensor generates measurement data include three translational acceleration with Cartesian axis "x", "y" and "z". In Fig. 2 visible followings the results of measurement in three-axis accelerometer sensors.
Fig. 2. Acceleration measurement of BMA180 sensor
Fig. 2 provides a snapshot of the measurement in units of "g" which indicates acceleration to gravity reference. It is indicate projection of the translational acceleration to center of Earth's gravity which can provide insight into changes in position of the observed physical system. The physical system which made the object of measurement in this case is a railway carriage, describe information about the train position which is relatively not constant. Perturbation that apparent in Fig. 2 are the effect of interflow the movement of railway carriages and noise sensors. It is the same as in Fig. 3 which
Fig. 3. Rotational measurement of Gyroscope ITG3205 sensor
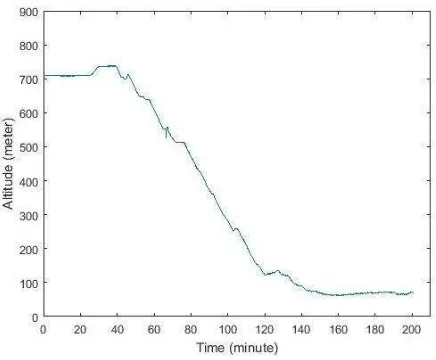
also provide information on how the train tends to change position. Fig. 3 provides an overview of rail in three positions rotational direction. The position changes in the physical system is indispensable both translational and rotational. The changes that have taken place describe how the movement of the train is the influence from the flatness of the railway. Railroad flatness can be observed from the chart that has a different result each time and position. The flatness could possibly due to different contours of the land among a plateau and lowlands. Fig. 4 provide information about altitude measured using a GPS system.
Fig. 4. Altitude measurement of GPS
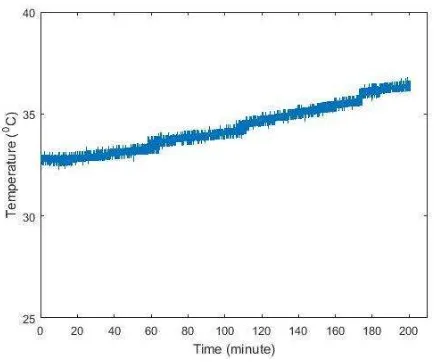
Measurements was obtained provide train location information are at an altitude approximately 710 m above sea level. At that altitude the air pressure measured to sensor is approximately 9,308 x 104 Pa. The air pressure, Fig. 5, indicates the mountainous area which also evident in Fig. 6, that the average temperature measured was 32.0 ° C. The temperature at the measurement location lower than the
temperature in the low-lying areas in general. Moreover altitude measurement data, GPS also has a measurement location coordinate data. This location is very useful to determine an occurrence of unevenness coordinate railroads.
Fig. 6. Temperature Measurement of BMP085 sensor
Within this research more focused on designing instrumentation to measure some physical quantities that indicate changes in position and some nearby measuring environmental parameters. ITG3205 sensor measurement results on Roll axis has a value of more than 1 deg/s which indicates that the train start goes from the silence position. This value indicates the physical system changes in rotational position from equilibrium state. Seems on the z-axis accelerometer measurement has a value approximately 1 g acceleration perpendicular to the center of gravity which indicates the position of railway carriages on the tracks.
In Fig. 6 there is information that the physical systems, railway carriages, suffered a process of displacement. There is minor change that signifies the value of the translational movement of trains in other words the train starts running. Measurements were observed in the time duration of approximately 3.5 hours ever since train started leaving the station Bandung towards Jatinegara station. Measurement results data are recorded on a data logger computer system. Backup data stored in the computer apart, also stored in the SD Card. Data recorded in the SD Card and the computer has similarities due to in essence embedded board system store data into SD Card and also sent to the computer at the same time.
IV. CONCLUSIONS
The design of flatness measurement instrumentation railways were built using embedded board by choosing platform Arduino Uno and Mega 2560. The sensor system used is the IMU GY81 which has several integrated sensors such are accelerometers BMA180, HMC5883L magnetometer, gyroscope ITG3205, BMP085 air pressure sensor, and Ublox LEA-5H GPS. Whereas for data logger using a standard CSV
format. Analysis conducted by performing data processing using MATLAB and observe the physical system changes that occur using chartist approach from the data logger. Results of the data plot in Fig. 2 to Fig. 6 may provide information about the movements of the physical system either translation, rotation and information about the coordinates when of data sampling underway.
Acknowledgment
We say thanks full to the Coordinator of Advanced Robotic Laboratory, Electrical Engineering, STEI ITB and Instrumentation Laboratory Coordinator of Earth Physics Research Center, LIPI, Serpong - South Tangerang, for their cooperation and fully support so that the research goes well.
References
[1] H. Wu, L. Zwirello, X. Li, L. Reichardt, and T. Zwick, “Motion Compensation with One-axis Gyroscope and Two-axis Accelerometer for Automotive SAR,” in German Microwave Conference, 2011, March, pp. 1–4.
[2] E. T. Benser, “Trends in Inertial Sensors and Applications,” in IEEE International Symposium on Inertial Sensors and Systems (ISISS) 2015, pp. 1–4.
[3] F. Edrisi, “Attitude Estimation of an Accelerated Rigid Body with Sensor Fusion based-on Switching Extended Kalman Filter,” in AI & Robotics (IRANOPEN), pp. 1 – 6.
[4] A. Susanto, W. Widada, and S. P. Hadi, “Inertial Measurement Unit Using Multigain Accelerometer Sensor and Gyroscope Sensor,” in 2011 International Conference on Electrical Engineering and Informatics, 2011, July, pp. 4–8.
[5] Y. Lee, S. Member, J. Kim, M. Son, and M. Lee, “Implementation of Accelerometer Sensor Module and Fall Detection Monitoring System based on Wireless Sensor Network,” in 29th Annual International Conference IEEE on Engineering in Medicine and Biology Society 2007, 2007, vol. 2401, pp. 2315–2318.
[6] U. G. Mada, “Fall Detection System Using Accelerometer and Gyroscope Based on Smartphone,” in 1st International Conference on Information Technology, Computer and Electrical Engineering (ICITACEE), 2014, pp. 99–104.
[7] J. Jacob, T. Nguyen, D. Y. C. Lie, S. Zupancic, J. Bishara, A. Dentino, and R. E. Banister, “A Fall Detection Study on the Sensors Placement Location and a Rule-Based Multi-Thresholds Algorithm Using Both Accelerometer and Gyroscopes,” in International Conference on Fuzzy Systems (FUZZ) 2011, 2011, pp. 666–671.
[8] V. Douangphachanh and H. Oneyama, “Exploring the Use of Smartphone Accelerometer and Gyroscope to Study on the Estimation of Road Surface Roughness Condition,” in 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO) 2014, 2014, pp. 783–787.
[9] K. Nagarjuna, “Design of Effective Landing Mechanism for Fully Autonomous Unmanned Aerial Vehicle,” in 3rd International Conference on Signal Processing, Communication and Networking (ICSCN) 2015, pp. 1–6.